В физике для описания инерционных качеств поступательного или линейного движения пользуются понятием массы тела. Если же движение рассматривается вокруг некоторой оси вращения, то используют несколько иную физическую характеристику – момент инерции. В данной статье рассмотрим, что это за величина и как можно рассчитать момент инерции тонкого стержня.
Вращение и момент инерции
Инерции момент проще всего ввести для материальной точки. Когда она, обладая массой M, вращается вокруг оси, описывая окружность радиусом R, то момент инерции для нее определяется по формуле:
I = M*R2.
Любое реальное тело, какой бы сложной геометрической формой оно не обладало, можно представить как совокупность материальных точек. Это означает, что для всего тела или системы твердых тел величину I можно вычислить, если проинтегрировать по элементарным массам dm выражение выше. Общая формула для определения момента инерции имеет вид:
I = ∫m(r2*dm).
Через объем и плотность это равенство записывается в таком виде:
I = ∫V(ρ*r2*dV).
Его часто применяют для вычисления значений I конкретных геометрических объектов.
Физический смысл инерции момента I заключается в том, что он определяет, насколько “сложно” данной силе, создающей некоторый крутящий момент, раскрутить или остановить вращающуюся систему. Иными словами, I характеризует инерционные свойства изучаемой системы.
Самым известным примером использования момента инерции является маховик двигателя внутреннего сгорания в автомобилях. Благодаря большому значению величины I, маховик обеспечивает плавность движения автомобиля, сглаживая любые резкие воздействия на коленчатый вал. Пример иного характера, где также важно знать момент инерции, – это закон сохранения момента импульса. Применяется он для поворота вокруг оси искусственных спутников в космическом пространстве Земли.
Тонкий стержень и оси вращения
Далее будет рассмотрен момент инерции стержня относительно осей (разных). Вычисления будут проводиться для тонкого стержня, который обладает однородным распределением массы, то есть его плотность во всех точках является постоянной величиной. Под тонким понимают такой стержень, у которого ширина (толщина) намного меньше, чем его длина L. Для обозначения его массы будем использовать букву M.
Из приведенных выше формул следует, что величина I зависит от относительного положения тела и оси вращения. Для стержня можно выделить три основных оси. Одна из них проходит через длину всего стержня. Поскольку его толщина стремится к нулю, то момент инерции для такого положения тела также будет стремиться к этому значению.
Две другие оси перпендикулярны длине рассматриваемого тела. Одна из них проходит через центр масс, назовем ее O1, вторая – через конец стержня, обозначим ее O2. Относительно них и вычислим величину I.
Момент инерции относительно O1

В первую очередь выпишем общую формулу. Имеем:
I = ∫V(ρ*r2*dV).
Обозначим площадь сечения стержня буквой S. Очевидно, что она стремится к нулю, поскольку стержень тонкий. Но это обозначение удобно ввести для выполнения дальнейших расчетов.
Теперь мысленно разобьем стержень на бесконечное количество мелких кусочков, каждый из которых будет иметь сечение S и толщину dl. Заменяя r на l в формуле выше, получаем:
I = ∫L(ρ*S*l2*dl).
Остается только подставить правильные пределы интегрирования и записать конечную формулу. Поскольку ось O1 проходит через середину стержня, то пределы интегрирования будут следующими:
I = ∫-L/2L/2(ρ*S*l2*dl).
Результатом вычисления этого интеграла является следующая формула:
I = M*L2/12.
Таким образом, момент инерции тонкого стержня определяется его массой и длиной.
Инерции момент относительно O2
Теперь рассмотрим ситуацию, когда ось вращения будет проходить через любой из концов стержня и будет ему перпендикулярна. Соответствующую формулу можно получить из записанного выше интеграла, если правильно подставить пределы интегрирования. Однако мы пойдем несколько иным путем и определим инерции момент с помощью теоремы Штейнера.
Она говорит о том, что если две оси являются параллельными друг другу и одна из них (ось O) проходит через центр масс тела, то момент инерции относительно второй оси может быть вычислен с помощью такого равенства:
I = I0 + M*h2.
Здесь I0 – момент инерции стержня относительно оси O, h – дистанция между осями.
Эту формулу можно с успехом применить для нашего случая. Поскольку I0 мы рассчитали в предыдущем пункте статьи относительно оси O1, и расстояние между O1 и O2 составляет L/2, то с использованием теоремы Штейнера получаем следующий результат:
I = I0 + M*h2 = M*L2/12 + M*L2/4 = M*L2/3.
Таким образом, для стержня величина I относительно оси O2 в 4 раза больше, чем относительно оси O1. Это означает, что для придания одинакового углового ускорения стержню в случае вращения вокруг оси O2 следует приложить в 4 раза больший крутящий момент, чем в случае оси O1.
Пример задачи
Дан тонкий стержень длиною 0,5 м и массой 5 кг. На расстоянии 2/5 от его конца расположена ось вращения, перпендикулярная стержню. Чему равен момент инерции системы?
Для решения задачи воспользуемся теоремой Штейнера. Расстояние между осями O1 и заданной в задаче равно:
h = 0,25 – 0,2 = 0,05 м.
Тогда получаем момент инерции стержня (однородного):
I = I0 + M*h2 = 5*0,52/12 + 5*0,052 = 0,117 кг*м2.
В СИ момент инерции стержня измеряется в указанных единицах.
| Момент инерции | |
|---|---|
 |
|
| Размерность | L2M |
| Единицы измерения | |
| СИ | кг·м² |
| СГС | г·см² |
Моме́нт ине́рции — тензорная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле. Момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества, которое, формально, может представлять собой не обязательно ось вращения (т.е. прямую), но и точку или плоскость. В последних случаях говорят о моменте инерции относительно точки или плоскости, а возникать такие величины могут в формальных вычислениях, например, при расчете тензора инерции.
Единица измерения в Международной системе единиц (СИ): кг·м².
Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от типа базового множества до которого отсчитываются расстояния от элементарных масс.
Осевой момент инерции[править | править код]

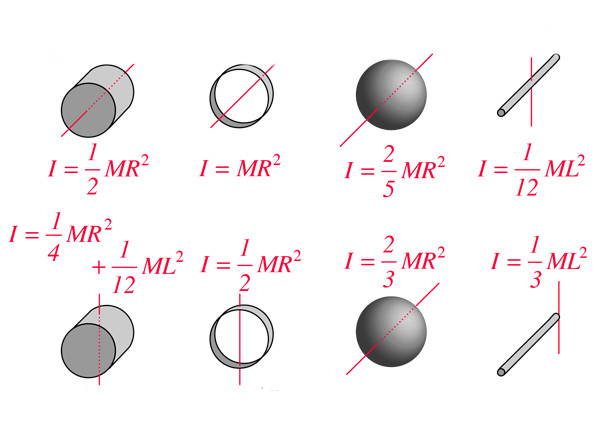
Осевые моменты инерции некоторых тел
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси[1]:

где:
- mi — масса i-й точки,
- ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.

где:
- dm = ρ dV — масса малого элемента объёма тела dV,
- ρ — плотность,
- r — расстояние от элемента dV до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то

Теорема Гюйгенса — Штейнера[править | править код]
Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Гюйгенса — Штейнера, момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями[1]:

где m — полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:

Осевые моменты инерции некоторых тел[править | править код]
| Тело | Описание | Положение оси a | Момент инерции Ja |
|---|---|---|---|
| Материальная точка массы m | На расстоянии r от точки, неподвижная | 
|
|

|
Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра |
|

|
Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | 
|
|
Полый толстостенный цилиндр массы m с внешним радиусом r2 и внутренним радиусом r1 | Ось цилиндра |  [Комм 1] [Комм 1]
|
|
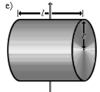
Сплошной цилиндр длины l, радиуса r и массы m | Ось перпендикулярна образующей цилиндра и проходит через его центр масс | 
|
|
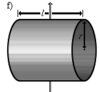
Полый тонкостенный цилиндр (кольцо) длины l, радиуса r и массы m | Ось перпендикулярна к цилиндру и проходит через его центр масс | 
|
|
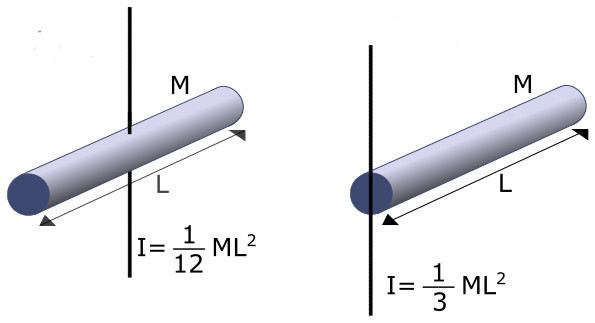
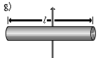
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | 
|

|
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | 
|

|
Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | 
|

|
Шар радиуса r и массы m | Ось проходит через центр шара | 
|

|
Конус радиуса r и массы m | Ось конуса | 
|
| Равнобедренный треугольник с высотой h, основанием a и массой m | Ось перпендикулярна плоскости треугольника и проходит через вершину (при высоте) | 
|
|
| Правильный треугольник со стороной a и массой m | Ось перпендикулярна плоскости треугольника и проходит через центр масс | 
|
|
| Квадрат со стороной a и массой m | Ось перпендикулярна плоскости квадрата и проходит через центр масс | 
|
|
| Прямоугольник со сторонами a и b и массой m | Ось перпендикулярна плоскости прямоугольника и проходит через центр масс | 
|
|
| Правильный n-угольник радиуса r и массой m | Ось перпендикулярна плоскости и проходит через центр масс | ![{displaystyle {frac {mr^{2}}{6}}left[1+2cos(pi /n)^{2}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)
|
|

|
Тор (полый) с радиусом направляющей окружности R, радиусом образующей окружности r и массой m | Ось перпендикулярна плоскости направляющей окружности тора и проходит через центр масс | 
|
Вывод формул[править | править код]
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобьём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJi. Тогда

Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду

Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Разобьём его на тонкие кольца толщиной dr. Масса и момент инерции тонкого кольца радиуса r составит

Момент инерции толстого кольца найдём как интеграл


Поскольку объём и масса кольца равны

получаем окончательную формулу для момента инерции кольца

Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R1 = 0), получим формулу для момента инерции цилиндра (диска):

Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh, перпендикулярные оси конуса. Радиус такого диска равен

где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска.
Масса и момент инерции такого диска составят


Интегрируя, получим

Сплошной однородный шар
Вывод формулы
Разобьём шар на тонкие диски толщиной dh, перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле

Масса и момент инерции такого диска составят

Момент инерции шара найдём интегрированием:

Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R:

Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR.

Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобьём стержень на малые фрагменты длиной dr. Масса и момент инерции такого фрагмента равна

Интегрируя, получим

Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l⁄2. По теореме Штейнера новый момент инерции будет равен

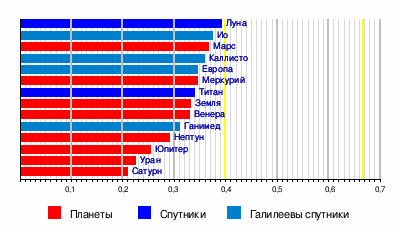
Безразмерные моменты инерции планет и их спутников[2][3][4]
Безразмерные моменты инерции планет и спутников[править | править код]
Большое значение для исследований внутренней структуры планет и их спутников имеют их безразмерные моменты инерции. Безразмерный момент инерции тела радиуса r и массы m равен отношению его момента инерции относительно оси вращения к моменту инерции материальной точки той же массы относительно неподвижной оси вращения, расположенной на расстоянии r (равному mr2). Эта величина отражает распределение массы по глубине. Одним из методов её измерения у планет и спутников является определение доплеровского смещения радиосигнала, передаваемого АМС, пролетающей около данной планеты или спутника. Для тонкостенной сферы безразмерный момент инерции равен 2/3 (~0,67), для однородного шара — 0,4, и вообще тем меньше, чем большая масса тела сосредоточена у его центра. Например, у Луны безразмерный момент инерции близок к 0,4 (равен 0,391), поэтому предполагают, что она относительно однородна, её плотность с глубиной меняется мало. Безразмерный момент инерции Земли меньше, чем у однородного шара (равен 0,335), что является аргументом в пользу существования у неё плотного ядра[5][6].
Центробежный момент инерции[править | править код]
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины[1][7]:



где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm.
Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела[7].
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции[7].
Геометрические моменты инерции[править | править код]
Геометрический момент инерции объёма относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где, как и ранее r — расстояние от элемента dV до оси a.
Размерность JVa — длина в пятой степени (
Геометрический момент инерции площади относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где интегрирование выполняется по поверхности S, а dS — элемент этой поверхности.
Размерность JSa — длина в четвёртой степени (
Через геометрический момент инерции площади выражается момент сопротивления сечения:

Здесь rmax — максимальное расстояние от поверхности до оси.
| Геометрические моменты инерции площади некоторых фигур | |
|---|---|
Прямоугольника высотой  и шириной и шириной  : :
|

|
Прямоугольного коробчатого сечения высотой и шириной по внешним контурам  и и  , а по внутренним и соответственно , а по внутренним и соответственно
|

|
Круга диаметром 
|

|


Момент инерции относительно плоскости[править | править код]
Моментом инерции твёрдого тела относительно некоторой плоскости называют скалярную величину, равную сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до рассматриваемой плоскости[9].
Если через произвольную точку 







В случае сплошного тела суммирование заменяется интегрированием.
Центральный момент инерции[править | править код]
Центральный момент инерции (момент инерции относительно точки O, момент инерции относительно полюса, полярный момент инерции) 
где:
Центральный момент инерции можно выразить через главные осевые моменты инерции, а также через моменты инерции относительно плоскостей[9]:


Тензор инерции и эллипсоид инерции[править | править код]
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором 
(1)
где 




Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора


где 


откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на 

и произведя замены:

получаем канонический вид уравнения эллипсоида в координатах 

Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой, проходящей через центр эллипсоида и эту точку:

См. также[править | править код]
- Кинематика твёрдого тела
- Метод главных компонент
- Сопротивление материалов
- Теорема Штейнера
- Теорема Кёнига (механика)
- Механические приложения тройного интеграла
- Механические приложения двойного интеграла
- Полярный момент инерции
- Список моментов инерции
- Момент силы
- Момент импульса
Комментарии[править | править код]
- ↑ При получении этой формулы путём вычитания момента инерции сплошного цилиндра радиусом r1 из цилиндра радиусом r2 необходимо обратить внимание, что их массы при этом не будут одинаковыми или равны m. При этом должно выполняться условие
. Из формулы для массы соответствующего цилиндра можно определить, что в этом случае
и
. В правильности использования знака «+» в этой формуле также можно убедиться, если сравнить моменты инерции полого толстостенного и сплошного цилиндров с одинаковыми массами. Действительно, у первого из этих цилиндров масса в среднем сосредоточена дальше от оси, чем у второго, поэтому и момент инерции этого цилиндра должен быть больше, чем у сплошного. Именно такое соотношение моментов инерции и обеспечивает знак «+». С другой стороны, в пределе при стремлении r1 к r2 формула для полого толстостенного цилиндра должна приобрести тот же вид, что и формула для полого тонкостенного цилиндра. Очевидно, что такой переход происходит только при использовании формулы со знаком «+».
Примечания[править | править код]
- ↑ 1 2 3 Тарг С. М. Момент инерции // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1992. — Т. 3. — С. 206—207. — 672 с. — 48 000 экз. — ISBN 5-85270-019-3.
- ↑ Planetary Fact Sheet. Дата обращения: 31 августа 2010. Архивировано 14 марта 2016 года.
- ↑ Showman, Adam P.; Malhotra, Renu. The Galilean Satellites (англ.) // Science. — 1999. — Vol. 286, no. 5437. — P. 77—84. — doi:10.1126/science.286.5437.77. — PMID 10506564.
- ↑ Margot, Jean-Luc; et al. Mercury’s moment of inertia from spin and gravity data (англ.) // Journal of Geophysical Research (англ.) (рус. : journal. — 2012. — Vol. 117. — doi:10.1029/2012JE004161.
- ↑ Галкин И.Н. Внеземная сейсмология. — М.: Наука, 1988. — С. 42-73. — 195 с. — (Планета Земля и Вселенная). — 15 000 экз. — ISBN 502005951X.
- ↑ Пантелеев В. Л. Физика Земли и планет. Гл. 3.4 — Гравитационное поле планеты. Дата обращения: 31 августа 2010. Архивировано 3 октября 2013 года.
- ↑ 1 2 3 Тарг С. М. Краткий курс теоретической механики. — М.: «Высшая школа», 1995. — С. 269—271. — 416 с. — ISBN 5-06-003117-9.
- ↑ 1 2 Бухгольц Н. Н. Основной курс теоретической механики. — 4-е изд. — М.: «Наука», 1966. — Т. 2. — С. 131.
- ↑ 1 2 3 Яблонский А. А. Динамика // Курс теоретической механики. — 3-е изд. — М.: «Высшая школа», 1966. — Т. II. — С. 102—103. — 411 с.
Литература[править | править код]
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Трофимова Т. И. Курс физики. — 7-е изд. — М.: Высшая школа, 2001. — 542 с.
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. Архивная копия от 7 января 2014 на Wayback Machine Издательство Физического факультета МГУ, 1997.
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с.
- Яворский Б. М., Детлаф А. А. Физика для школьников старших классов и поступающих в вузы: учебное пособие — М.: Дрофа, 2002, 800с. ISBN 5-7107-5956-3
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560 с.
- Беляев Н. М. Сопротивление материалов. Главная редакция физико-математической литературы изд-ва «Наука», 1976. — 608 с.
Ссылки[править | править код]
- Определение момента инерции тел простой формы.
Момент
инерции —
скалярная
физическая величина, характеризующая
распределение масс в теле, равная сумме
произведений элементарных масс на
квадрат их расстояний до базового
множества (точки, прямой или плоскости).
Единица
измерения СИ: кг·м².
Обозначение:
I
или J.
 Для
Для
расчета моментов
инерции
тонкого диска
массы m
и радиуса R
выберем систему координат так, чтобы
ее оси совпадали с главными центральными
осями (рис.32). Определим момент инерции
тонкого однородного диска относительно
оси z
, перпендикулярной к плоскости диска.
Рассмотрим бесконечно тонкое кольцо с
внутренним
радиусом
r
и наружным r+dr.
Площадь такого кольца ds=2r
$pi$ dr, а его
масса
![]() ,
,
гдеS= $pi$ R2
– площадь всего диска. Момент инерции
тонкого кольца найдется по формуле
dJ=dmr2.
Момент инерции всего диска определяется
интегралом
![]()
Вычисление
момента
инерции тонкого стержня:
Пусть
тонкий стержень имеет длину l
и массу m.
Разделим его на малые элементы длины
dx
(рис.27), масса которых
![]() .
.
Если выбранный элемент находится на
расстоянии x от оси, то его момент инерции![]() ,
,
т.е.![]()
Интегрируя
последнее соотношение в пределах от 0
до l/2
и удваивая полученное выражение (для
учета левой половины стержня), получим
![]()
Момент
инеpции обручаотносительно оси,
пpоходящей чеpез центp кольца пеpпендикуляpно
к его плоскости. В этом случае все
элементаpные массы обруча удалены от
оси на одинаковое pасстояние, поэтому
в сумме (3.18) r2 можно вынести за знак
суммы, т. е.![]()
Теорема
Штейнера:
В
общем случае вращения тела произвольной
формы вокруг произвольной оси, вычисление
момента инерции может быть произведено
с помощью теоремы Штейнера: момент
инерции относительно произвольной оси
равен сумме момента инерции J0 относительно
оси, параллельной данной и проходящей
через центр инерции тела, и произведения
массы тела на квадрат расстояния между
осями: J=J0+ma^2.
Например,
момент инерции диска относительно оси
О’ в соответствии с теоремой Штейнера:
![]()
17. Момент инерции однородного тела вращения. Моменты инерции конуса, шара.
Линия
![]() – ось вращения.
– ось вращения.
![]() – масса на квадрат радиуса окружности,
– масса на квадрат радиуса окружности,
по которой движется материальная точка.
Все
тело мысленно разбиваем на маленькие
объемы. Масса этого кусочка
![]() .
.
![]()
Твердое
тело представляется как совокупность
системы точечных масс.
![]() – расстояние, на котором находится точка
– расстояние, на котором находится точка
от оси вращения.
![]()
![]() – общий алгоритм определения собственного
– общий алгоритм определения собственного
момента инерции твердого тела, относительно
оси проходящей через центр инерции
данного тела.
Момент
инерции шара.
Сплошной шар массы
m
и радиуса R
можно рассматривать как совокупность
бесконечно тонких сферических слоев с
массами dm
, радиусом r,
толщиной dr
(рис.35).

Рассмотрим
малый элемент сферического слоя $delta$
m с координатами
x, y, z.
Его моменты инерции относительно осей
проходящих через центр слоя – $delta$
Jx,
$delta$ Jy,
$delta$ Jz,
равны
![]()
Т.
е. можно записать
![]() (п.26)
(п.26)
Так как для
элементов сферического слоя x2+y2+z2=r2
то
![]()
После
интегрирования по всему объему слоя
получим
![]() (п.27)
(п.27)
Так как, в силу
симметрии для сферического слоя
dJx=dJy=dJz=dJ
, а
 ,
,
то![]() Интегрируя по всему объему шара,
Интегрируя по всему объему шара,
получаем![]()
Окончательно
(после интегрирования) получим, что
момент инерции шара относительно оси,
проходящей через его центр равен
![]()
Разобьём
КОНУС
на цилиндрические слои
ось
толщиной dr.
Масса такого слоя
dm
= r2dr,
где
ρ – плотность
материала, из которого изготовлен конус.
Момент инерции этого слоя
dI = dm.r2.
Момент
инерции всего конуса
складывается
из моментов инерции всех слоёв:
I
=
![]() =
=
![]() ρπ
ρπ
r
4
dr
=
![]() ρR5.
ρR5.
Остаётся выразить
его через массу всего цилиндра:
m
=
![]() =
=
![]() =
=
![]() R3,
R3,
отсюда ρ
=
![]() ,
,
I
=
![]() =
=
![]() mR2.
mR2.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В физике для описания инерционных качеств поступательного или линейного движения пользуются понятием массы тела. Если же движение рассматривается вокруг некоторой оси вращения, то используют несколько иную физическую характеристику – момент инерции. В данной статье рассмотрим, что это за величина и как можно рассчитать момент инерции тонкого стержня.
Вращение и момент инерции
Инерции момент проще всего ввести для материальной точки. Когда она, обладая массой M, вращается вокруг оси, описывая окружность радиусом R, то момент инерции для нее определяется по формуле:
I = M*R2.
Любое реальное тело, какой бы сложной геометрической формой оно не обладало, можно представить как совокупность материальных точек. Это означает, что для всего тела или системы твердых тел величину I можно вычислить, если проинтегрировать по элементарным массам dm выражение выше. Общая формула для определения момента инерции имеет вид:
I = ∫m(r2*dm).
Через объем и плотность это равенство записывается в таком виде:
I = ∫V(ρ*r2*dV).
Его часто применяют для вычисления значений I конкретных геометрических объектов.

Физический смысл инерции момента I заключается в том, что он определяет, насколько “сложно” данной силе, создающей некоторый крутящий момент, раскрутить или остановить вращающуюся систему. Иными словами, I характеризует инерционные свойства изучаемой системы.
Зыбучий, ненадежный, неустойчивый песок – плохая опора, и об этом знает каждый из нас. Более того,…
Самым известным примером использования момента инерции является маховик двигателя внутреннего сгорания в автомобилях. Благодаря большому значению величины I, маховик обеспечивает плавность движения автомобиля, сглаживая любые резкие воздействия на коленчатый вал. Пример иного характера, где также важно знать момент инерции, – это закон сохранения момента импульса. Применяется он для поворота вокруг оси искусственных спутников в космическом пространстве Земли.
Тонкий стержень и оси вращения
Далее будет рассмотрен момент инерции стержня относительно осей (разных). Вычисления будут проводиться для тонкого стержня, который обладает однородным распределением массы, то есть его плотность во всех точках является постоянной величиной. Под тонким понимают такой стержень, у которого ширина (толщина) намного меньше, чем его длина L. Для обозначения его массы будем использовать букву M.
Из приведенных выше формул следует, что величина I зависит от относительного положения тела и оси вращения. Для стержня можно выделить три основных оси. Одна из них проходит через длину всего стержня. Поскольку его толщина стремится к нулю, то момент инерции для такого положения тела также будет стремиться к этому значению.
Две другие оси перпендикулярны длине рассматриваемого тела. Одна из них проходит через центр масс, назовем ее O1, вторая – через конец стержня, обозначим ее O2. Относительно них и вычислим величину I.
Момент инерции относительно O1

В первую очередь выпишем общую формулу. Имеем:
Зыбучий, ненадежный, неустойчивый песок – плохая опора, и об этом знает каждый из нас. Более того,…
I = ∫V(ρ*r2*dV).
Обозначим площадь сечения стержня буквой S. Очевидно, что она стремится к нулю, поскольку стержень тонкий. Но это обозначение удобно ввести для выполнения дальнейших расчетов.
Теперь мысленно разобьем стержень на бесконечное количество мелких кусочков, каждый из которых будет иметь сечение S и толщину dl. Заменяя r на l в формуле выше, получаем:
I = ∫L(ρ*S*l2*dl).
Остается только подставить правильные пределы интегрирования и записать конечную формулу. Поскольку ось O1 проходит через середину стержня, то пределы интегрирования будут следующими:
I = ∫-L/2L/2(ρ*S*l2*dl).
Результатом вычисления этого интеграла является следующая формула:
I = M*L2/12.
Таким образом, момент инерции тонкого стержня определяется его массой и длиной.
Инерции момент относительно O2
Теперь рассмотрим ситуацию, когда ось вращения будет проходить через любой из концов стержня и будет ему перпендикулярна. Соответствующую формулу можно получить из записанного выше интеграла, если правильно подставить пределы интегрирования. Однако мы пойдем несколько иным путем и определим инерции момент с помощью теоремы Штейнера.

Она говорит о том, что если две оси являются параллельными друг другу и одна из них (ось O) проходит через центр масс тела, то момент инерции относительно второй оси может быть вычислен с помощью такого равенства:
I = I0 + M*h2.
Здесь I0 – момент инерции стержня относительно оси O, h – дистанция между осями.
Эту формулу можно с успехом применить для нашего случая. Поскольку I0 мы рассчитали в предыдущем пункте статьи относительно оси O1, и расстояние между O1 и O2 составляет L/2, то с использованием теоремы Штейнера получаем следующий результат:
I = I0 + M*h2 = M*L2/12 + M*L2/4 = M*L2/3.
Таким образом, для стержня величина I относительно оси O2 в 4 раза больше, чем относительно оси O1. Это означает, что для придания одинакового углового ускорения стержню в случае вращения вокруг оси O2 следует приложить в 4 раза больший крутящий момент, чем в случае оси O1.
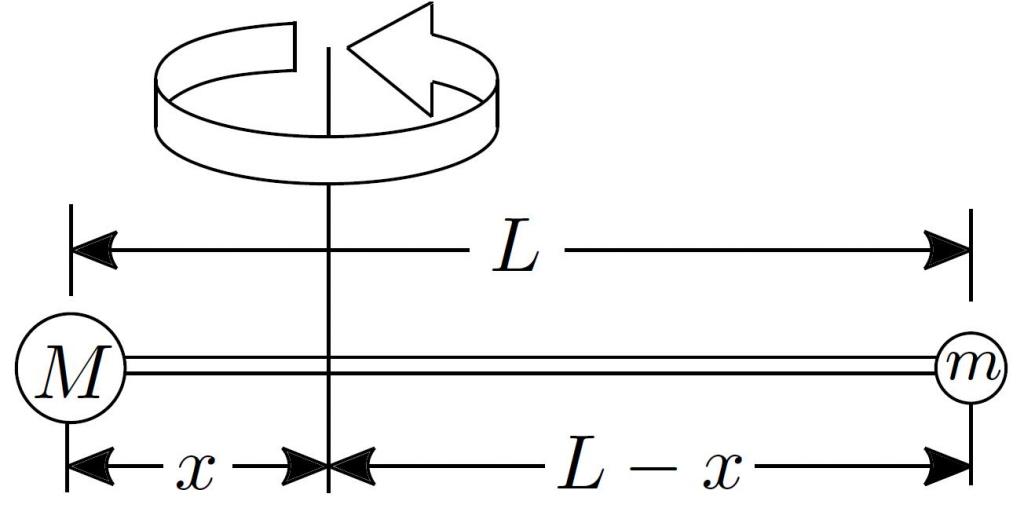
Пример задачи

Дан тонкий стержень длиною 0,5 м и массой 5 кг. На расстоянии 2/5 от его конца расположена ось вращения, перпендикулярная стержню. Чему равен момент инерции системы?
Для решения задачи воспользуемся теоремой Штейнера. Расстояние между осями O1 и заданной в задаче равно:
h = 0,25 – 0,2 = 0,05 м.
Тогда получаем момент инерции стержня (однородного):
I = I0 + M*h2 = 0,52/12 + 0,052 = 0,117 кг*м2.
В СИ момент инерции стержня измеряется в указанных единицах.
