
Карточка № 2.11б (432). Расчет сложных электрических цепей
|
Являются ли контурные токи реальными |
Да |
188 |
|||||
|
токами ветвей? |
|||||||
|
Нет |
192 |
||||||
|
Это |
зависит |
от расположения ветви |
189 |
||||
|
(внешнее или внутреннее) |
|||||||
|
На сколько сокращается число уравнений при |
На число узлов в схеме |
194 |
|||||
|
использовании метода контурных токов? |
|||||||
|
На число независимых контуров в схеме |
186 |
||||||
|
На число узлов в схеме без одного |
197 |
||||||
|
На число независимых контуров в схеме |
176 |
||||||
|
без одного |
|||||||
|
Как выбирается направление контурных токов? |
По часовой стрелке |
180 |
|||||
|
Против часовой стрелки |
172 |
||||||
|
Произвольно |
179 |
||||||
|
Когда можно воспользоваться методом |
Когда |
сложная |
цепь содержит всего два |
182 |
|||
|
узлового напряжения? |
источника |
||||||
|
Когда сложная цепь содержит всего два |
177 |
||||||
|
узла |
|||||||
|
Для расчета любой сложной цепи |
181 |
||||||
|
Выберите |
правильную |
формулу |
У1я |
I2=(E2–Uab)G2 |
185 |
||
|
определения I2 в этой цепи |
|||||||
|
I2=(-E2–Uab)G2 |
190 |
||||||
|
I2=(-E2+Uab)G2 |
185 |
||||||
До сих пор рассматривались линейные цепи. В отличие от линейной цепи, у которой сопротивления нагрузки не зависят ни от тока, ни от напряжения, т. е. являются постоянными,
нелинейная цепь содержит один или несколько нелинейных элементов.
Нелинейным называется элемент, который не обладает постоянным сопротивлением. Примерами нелинейных элементов являются лампы накаливания, электронные, полупроводниковые и ионные приборы.
В нелинейной цепи между током и напряжением нет линейной пропорциональной зависимости, следовательно, закон Ома неприменим для расчета таких цепей.
Расчет нелинейных цепей, как правило, производят графическими методами. Для этой цепи задаются вольт–амперные характеристики нелинейных элементов, которые представляют собой зависимость тока в элементе от напряжения на его зажимах: I=f(U).
На рис. 2.16 представлены вольт–амперные характеристики нелинейных элементов — лампы накаливания с металлической нитью (кривая 1) и лампы накаливания с угольной нитью (кривая 3). Для сравнения показана вольт–амперная характеристика линейного элемента (прямая 2). Рассмотрим методы расчета нелинейных цепей.
Последовательное соединение.
Задача состоит в том, чтобы по заданному напряжению U0 и вольт–амперным характеристикам нелинейных элементов НЭ1, НЭ2 найти ток I0 и напряжения U1, U2 на элементах неразветвленной цепи (рис. 2.17).

|
Рис. 2.16. Вольт–амперные характеристики линейного и |
Рис. 2.17. Последовательное соединение нелинейных |
|
нелинейных элементов |
элементов |
Так как элементы НЭ1 и НЭ2 соединены последовательно, то через них будет проходить одинаковый ток. Воспользуемся этим для построения общей характеристики цепи (рис. 2.18) (здесь I=f1(U) и I=f2(U)) —вольт–амперные характеристики первого и второго нелинейных элементов).
Зададимся произвольными токами I‘ и I ” и произведем для них сложение характеристик по напряжению, т. е. используем свойство последовательного соединения сопротивлений: общее напряжение равно сумме напряжений на участках. Так, например, точку А‘ общей характеристики получаем в результате сложения абсцисс А0′А1′ и А0′А2′ . Точно так же получаем точку А” и т. д.
Соединив точки А‘, А” и т. д. плавной кривой, получаем общую вольт–амперную характеристику I=f(U) цепи. Теперь отложим на оси абсцисс отрезок, соответствующий в масштабе значению U0. Перпендикуляр, восставленный из точки, соответствующей U0, до пересечения с общей характеристикой, определяет силу тока I0 цепи. Отрезки прямых А0А1 и А0А2, проведенных через точку А параллельно оси абсцисс, определяют напряжения U, U2 на нелинейных элементах НЭ и
НЭ2.
|
Рис. 2.18. Графический расчет неразветвленной цепи |
Рис. 2.19. Параллельное соединение нелинейных |
|
элементов |
Рис. 2.20. Графический расчет разветвленной цепи
Параллельное соединение.
По заданному напряжению U0 и вольт–амперным характеристикам нелинейных элементов НЭ1, НЭ2 найдем общий ток I0 и токи I1 и I 2 в ветвях цепи (рис. 2.19).
Так как элементы НЭ и НЭ2 соединены параллельно, на них будет одинаковое напряжение. Воспользуемся этим для построения общей характеристики цепи (рис. 2.20). Зададимся произвольными напряжениями U’ и U” и, используя первый закон Кирхгофа, сложим характеристики по току. Операция сложения аналогична описанной, однако теперь складываются ординаты выбранных точек. Получив общую характеристику I=f’(U), находим токи I0, I1, I2. Для этого по оси абсцисс откладываем заданное напряжение U0.
Перпендикуляр О‘А, восставленный из точки О‘ до пересечения с общей характеристикой, определяет в масштабе силу тока I0 цепи, а его отрезки О‘А1 и О‘А2 — соответственно токи I1 и I2.
Рассмотренные методы расчета широко используются при анализе цепей, содержащих электронные и полупроводниковые приборы.
Карточка № 2.12 (397).
Нелинейные электрические цепи
|
Было установлено, что закон Ома неприменим к нелинейным |
Нет |
193 |
|
|
цепям. Применимы ли к нелинейным цепям законы |
|||
|
Кирхгофа? |
Да |
175 |
|
|
Какую из приведенных здесь формул можно использовать |
Р= I2R |
184 |
|
|
для определения мощности нелинейного элемента? |
|||
|
P=UI |
174 |
||
|
P=U2/R |
199 |
||
|
Все три |
191 |
||
|
Можно ли применить графический метод расчета к линейным |
Можно |
183 |
|
|
цепям? |
|||
|
Нельзя |
198 |
||
|
Можно ли так подобрать два нелинейных элемента, чтобы их |
Нельзя |
173 |
|
|
общая вольт–амперная характеристика стала линейной? |
|||
|
Можно |
187 |
||
|
При изменении тока, проходящего через проволочное |
Да |
200 |
|
|
сопротивление, меняется температура этого сопротивления. |
|||
|
Применим ли закон Ома к такому сопротивлению? |
Нет |
196 |
|
|
Это зависит от |
значения |
178 |
|
|
температурного коэффициента |
|||
|
сопротивления α |
|||
Соседние файлы в папке РГР 2
- #
- #
Содержание:
Расчет нелинейных электрических цепей:
Законы Кирхгофа в первой форме записи (
Приведение нелинейных цепей к линейным
Такое приведение можно сделать, если нелинейные элементы цепи работают в узком диапазоне напряжений и токов, где соответствующие участки вольтамперных характеристик близки к прямым.
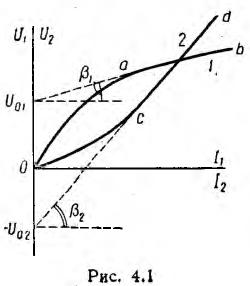
Пусть это, например, имеет место для участков ab и cd характеристик 1 и 2 (рис. 4.1) нелинейных резисторов R1 и R2 цепи рис. 4.2, а. Так как продолжения этих прямых составляют с осью токов углы  и пересекают ось напряжений в точках
и пересекают ось напряжений в точках 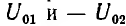 , уравнения прямых получают следующий вид:
, уравнения прямых получают следующий вид:

где R11 и R12 — дифференциальные сопротивления этих резисторов, имеющие постоянные значения на участках ab и cd; k — масштабный коэффициент.
Следовательно, каждый такой нелинейный элемент может быть представлен в виде эквивалентной схемы, состоящей из последовательного соединения — резисторов R11 или R12 и источника напряжения U01 или — U02 включенного навстречу внешнему напряжению, так как последнее должно преодолеть напряжение этого источника.
В результате нелинейная цепь рис. 4.2, а заменяется линейной цепью рис. 4.2, б. Так как при принятом положительном направлении напряжение U02 второго источника отрицательно, его направление совпадает с напряжением U всей цепи. Полученная цепь рис. 4.2, б рассчитывается обычными методами. Решение будет правильным только в том случае, если токи I1 и I2 не выйдут за пределы участков ab и cd (см. рис. 4.1).
Графические методы расчета нелинейных цепей
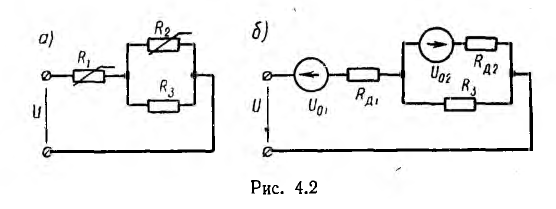
Вольтамперная характеристика одиночного нелинейного резистора (см. рис. 1.9—1.11) сразу позволяет определить ток по заданному напряжению или напряжение по заданному току. При последовательном соединении любого числа нелинейных и линейных резисторов вольтамперная характеристика всей цепи строится путем суммирования ординат характеристик отдельных резисторов в соответствии с зависимостью

На рис. 4.3 показано такое построение для двух последовательно соединенных резисторов. По характеристике всей цепи для заданного значения напряжения U’ определяется соответствующий ему ток I’, а по Рис. 4.3 нему — напряжения  участков цепи.
участков цепи.
Если нужно определить ток и напряжения на участках цепи из двух приемников только при одном значении напряжения U всей цепи, нет надобности строить вольтамперную характеристику всей цепи, следует лишь отложить горизонталь для заданного значения U, а oт нее вниз — характеристику U2 (I) (рис. 4.4, а). Её пересечение с характеристикой U1(I) даст рабочую точку и определит тем самым ток I’ цепи и напряжения U’1 и U’2 на участках.
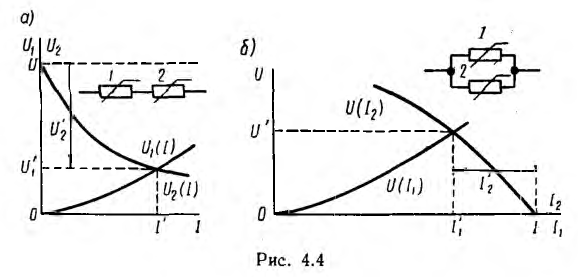
Рис. 4.4, а иллюстрирует также графическое решение задачи определения тока и напряжения цепи при питании нелинейного резистора с вольтамперной характеристикой Ul (I) от источника напряжения с нелинейной внешней характеристикой U2 (I).
При параллельном соединении нескольких линейных и нелинейных резисторов вольтамперная характеристика всей цепи строится путем суммирования абсцисс характеристик, т. е. токов отдельных резисторов:
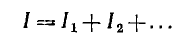
На рис. 4.5 показано такое построение для двух параллельно соединенных резисторов. По характеристике для всей цепи для любого заданного тока I определяется напряжение U’, а по нему — токи I1‘ и I2‘ участков цепи.
Для определения токов ветвей только при одном значении тока I всей цепи можно применить упрощенное построение, аналогичное рис. 4.4, а и показанное на рис. 4.4, б для резисторов с теми же вольтамперными характеристиками. Характеристика U (I2) строится влево от вертикали для заданного значения I. Ее пересечение с характеристикой U (I1) определяет напряжение U’ цепи и токи I1‘ и I2‘ на ее участках.
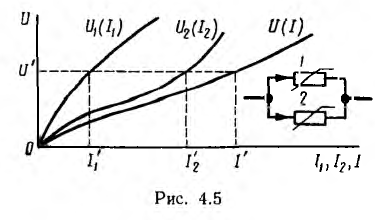
При смешанном соединении, например при расчете цепи рис. 4.6, а, также строится вольтамперная характеристика всей цепи по характеристикам отдельных резисторов (рис. 4.6, б). С помощью суммирования абсцисс, т. е. токов I2 и I3, строится характеристика параллельного разветвления U23 (I1), затем, суммируя ординаты этой характеристики и характеристики Ul (I1), т. е. напряжения U23 и U1 строят характеристику U(I1) всей цепи. По этой характеристике для заданного напряжения U’ определяется ток I’1 цепи,
после чего по характеристикам Ul (I1) и U23 (I1), находят напряжения  участков, а для напряжения U’23 по характеристикам U2 (I2) и U3(I3) — токи
участков, а для напряжения U’23 по характеристикам U2 (I2) и U3(I3) — токи 
Совершенно аналогичны построения, если цепь со смешанным соединением, помимо линейных и нелинейных резисторов, содержит источники электрической энергии, например источники напряжения, вольтамперные характеристики которых без учета внутренних сопротивлений представляют собой прямые, параллельные оси абсцисс.
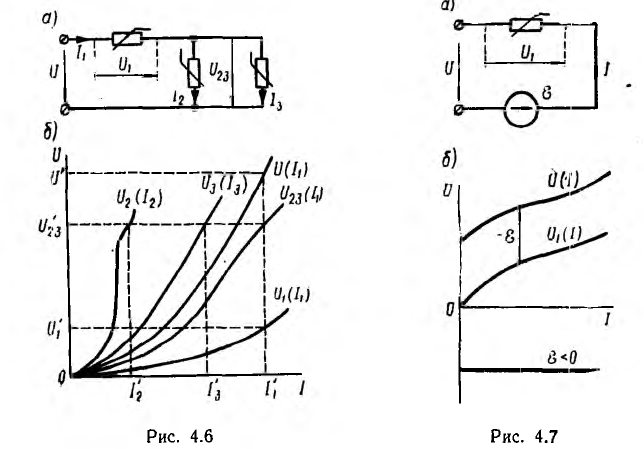
Их ординаты и следует алгебраически просуммировать с ординатами
вольтамперных характеристик участков (в том числе внутренних сопротивлений), соединенных последовательно с этими источниками, чтобы получить полные характеристики ветвей. При этом необходимо соблюдать правило знаков. Так как напряжение всей ветви должно преодолевать э. д. с. включенного в ветвь источника, то при э. д. с., направленной навстречу току (рис. 4.7, а), нужно при суммировании брать ее с положительным знаком (рис. 4.7, б), и наоборот.
После построения аналогичных характеристик для всех ветвей подобно предыдущему постепенно строится характеристика всей цепи и по заданному ее напряжению обратным построением определяются напряжения и токи всех ветвей цепи. Аналогичным образом решаются задачи при заданных источниках тока.
Если любая сложная цепь содержит одну нелинейную ветвь, для расчета может быть применен метод эквивалентного источника энергии: вся цепь, кроме нелинейной ветви, заменяется эквивалентным источником напряжения или тока, после чего задача сводится к только что рассмотренной задаче последовательного или параллельного соединения двух элементов — нелинейной ветви и внутреннего сопротивления (проводимости) эквивалентного источника. Это позволит определить ток или напряжение нелинейной ветви, после чего может быть рассчитана линейная часть цепи.
Метод последовательных приближений
Этот метод, называемый также итерационным, является приближенным аналитическим способом решения нелинейных алгебраических уравнений.
В качестве примера рассматривается расчет простой цепи рис. 4.8, состоящей из резистора с нелинейным сопротивлением R(I) с заданной вольтамперной характеристикой, питаемого от источника напряжения с заданной постоянной э. д. с.  и нелинейной внешней характеристикой, из которой может быть получена вольтамперная характеристика его внутреннего сопротивления RB. Вольтамперные характеристики могут быть заданы не графически, а аналитически.
и нелинейной внешней характеристикой, из которой может быть получена вольтамперная характеристика его внутреннего сопротивления RB. Вольтамперные характеристики могут быть заданы не графически, а аналитически.
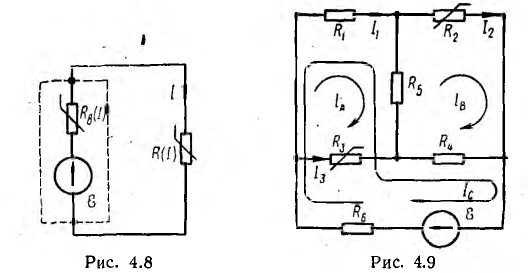
Расчет этой цепи может быть произведен по уравнению
где n — порядковый номер приближения.
Задавшись произвольно нулевым приближением тока I0, по вольтамперным характеристикам находят соответствующие ему напряжения: U0 на внешнем сопротивлении R0 и U0B на внутреннем сопротивлении R0B. Затем определяют эти сопротивления и суммарное сопротивление цепи:

а из исходного уравнения — первое приближение тока
Исходя из этого значения тока, весь ход расчета повторяется для определения второго приближения I2 и так до тех пор, пока из-за сходимости итерационного процесса результат не начнет практически повторяться.
Как известно из математики, итерация в зависимости от вида характеристик может дать расходящийся процесс. Тогда сходимость можно получить на основе исходного уравнения для другой величины, например для напряжения на приемнике:
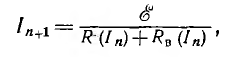
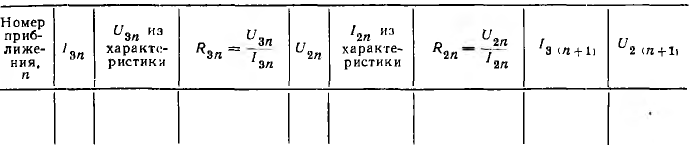
В случае сложной цепи, например моста с двумя нелинейными резисторами (рис. 4.9), исходные уравнения могут быть составлены по методу контурных токов. При этом контуры должны быть выбраны так, чтобы контурный ток нелинейных ветвей одновременно был их действительным током. В противном случае действительный ток нельзя находить путем алгебраического суммирования проходящих по нелинейной ветви двух контурных токов, так как принцип наложения для нелинейных сопротивлений неприменим.
Правильный выбор контурных токов показан на рис. 4.9. Здесь токи нелинейных участков цепи 
Тогда система уравнений получает вид:

Если нелинейное сопротивление R2(I2) с увеличением тока убывает, a R3(I3) — возрастает, можно показать, что для обеспечения сходимости итерационного процесса из этой системы уравнений надо найти ток I3 = IA и напряжение U2 = R2IB = R2I2 выразив их через все постоянные заданные величины и нелинейные сопротивления R2 и R3. Результаты расчетов целесообразно вносить в табл. 4.1,
из которой видны последовательность и способ получения отдельных величин.
Таблица 4.1
Закончив вычисления после практической сходимости итерационного процесса и определив тем самым напряжения и токи нелинейных
участков цепи, на основе законов Кирхгофа определяют напряжения
и токи всех линейных участков, например ток I1 из уравнения

Нелинейные электрические цепи постоянного тока
В автоматике, электронике и радиотехнике широко применяются элементы электрических цепей, имеющие нелинейную зависимость между током и напряжением U = f(I).
Электрическая цепь, в которую входят нелинейные элементы, называется нелинейной.
Нелинейную вольт-амперную характеристику имеют электровакуумные приборы (см. рис. 2.6), фотоэлементы (см. рис. 2.7), газоразрядные приборы (см. рис. 2.8—2.10), полупроводниковые приборы (см. рис. 2.15).
Большую группу нелинейных элементов представляют нелинейные сопротивления: терморезисторы, варисторы, бареттеры и др.
В данной главе рассмотрены принципы решения некоторых задач расчета электрических цепей с нелинейными элементами на основе их вольт-амперных характеристик.
Эквивалентные схемы простейших нелинейных цепей
Для нелинейных электрических цепей остаются справедливыми законы Ома и Кирхгофа. Однако рассмотренные ранее методы расчета для нелинейных цепей непосредственно применить нельзя.
Аналитический расчет нелинейной цепи можно выполнить при условии, что вольт-амперные характеристики нелинейных элементов выражаются относительно простыми уравнениями I = f(U). Например, для электронной лампы известна зависимость I = kU3/2. Кроме того, характеристики некоторых нелинейных элементов в определенном интервале изменения напряжения и тока прямолинейны или близки к прямой. В таких случаях можно составить для нелинейного элемента эквивалентную схему замещения с линейными элементами и ввести ее в аналитический расчет.
В других случаях схемы замещения остаются нелинейными, но с их помощью достигаются упрощения схем нелинейных цепей.
Статическое и динамическое сопротивления нелинейного элемента
У нелинейных элементов различают статическое и динамическое сопротивления (рис. 6.1, а).
Статическим сопротивлением в данной точке a вольт-амперной характеристики называют отношение напряжения к току, соответствующих этой точке:

где mu и m — масштабы напряжения и тока; mR = mu /mi — масштаб сопротивления.
Динамическое сопротивление в точке a определяется отношением бесконечно малых приращений напряжения dU и тока dI:

Динамическое сопротивление пропорционально тангенсу угла наклона касательной к вольт-амперной характеристике в точке a.
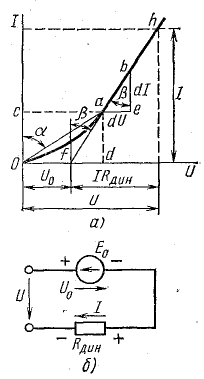
Рис. 6.1. Вольт-амперная характеристика и схема замещения нелинейного элемента
Приведение нелинейных цепей к линейным
Если продолжить линейный участок h-b-a характеристики до пересечения с осью напряжения, то он пересечет ее в точке f.
Отрезок  в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольт-амперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления IRдин, т. е. прямая
в принятом масштабе напряжений выражает постоянное напряжение U0. Нетрудно заметить, что в любой точке h прямолинейной части вольт-амперной характеристики напряжение складывается из постоянного напряжения U0 и изменяющейся части, определяемой произведением тока и динамического сопротивления IRдин, т. е. прямая  выражается уравнением
выражается уравнением

На основании уравнения (6.3) нелинейный элемент можно представить схемой последовательного соединения э. д. с. Е0 = U0 и динамического сопротивления Rдин (рис. 6.1, б). При этом

Аналогичную схему замещения можно получить для нелинейного элемента с вольт-амперной характеристикой, обращенной выпуклостью к оси токов (рис. 6.2, а). Э. д. с. Е0 в этом случае будет направлена по направлению тока. На примере данной характеристики покажем, что нелинейный элемент можно представить схемой параллельного соединения источника тока и динамической проводимости Gдин.
В линейной части характеристики ток можно представить в виде суммы

Этому равенству соответствует схема замещения рис. 6.2, б.
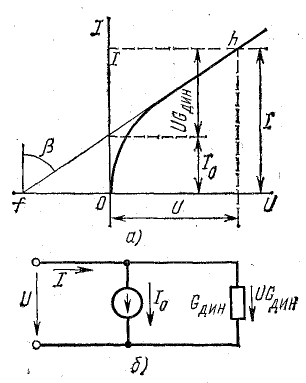
Рис. 6.2. Вольт-амперная характеристика и схема замещения нелинейного элемента
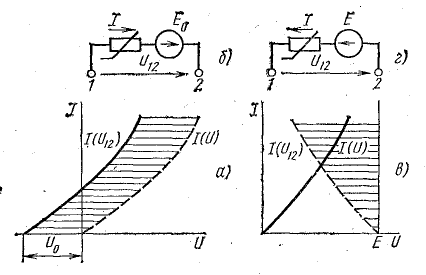
Рис. 6.3. Вольт-амперные характеристики и схемы замещения нелинейного двухполюсника
После замены нелинейных элементов эквивалентными схемами замещения с линейными элементами нелинейную цепь можно рассчитать одним из методов, применяемых для расчета линейных цепей.
Нелинейный активный двухполюсник
Нелинейный элемент, вольт-амперная характеристика которого не проходит через начало координат (рис. 6.3, а), можно представить схемой последовательного соединения постоянной э. д. с. и нелинейного сопротивления.
Если характеристику нелинейного элемента перенести так, чтобы она проходила через начало координат, то получится зависимость I(U) нелинейного сопротивления эквивалентной схемы, в которую кроме этого нелинейного сопротивления последовательно включен источник э. д. с. Е0.
Эквивалентная схема рис. 6.3, б представляет собой активный нелинейный двухполюсник, для которого справедливо уравнение по второму закону Кирхгофа. В данном случае

Эту схему вводить в аналитический расчет нельзя, так как она остается нелинейной в отличие от схемы рис. 6.1, б или 6.2, б, но ее можно использовать для упрощения более сложной схемы, в которую она входит как часть.
В некоторых случаях полезно или необходимо обратное построение: по известной вольт-амперной характеристике нелинейного сопротивления и величине э. д. с. Е последовательно с ним включенного источника строят вольт-амперную характеристику активного нелинейного двухполюсника (рис. 6.3, в).
Графический расчет нелинейных электрических цепей
Многие нелинейные элементы, применяемые в практике, имеют вольт-амперные характеристики, у которых нет линейных участков, и уравнения для их аналитического выражения.
Расчет цепей, содержащих такие элементы, осуществляется графическими методами, которые применимы при любом виде вольт-амперных характеристик и дают результаты достаточной точности.
Исходные данные для расчета (вольт-амперные характеристики элементов цепи) задаются в виде графиков или таблиц.
Задачу определения тока одного элемента по напряжению этого элемента или обратную задачу решают просто: заданную величину отмечают на оси координат, находят соответствующую ей точку кривой, а затем на другой оси определяют искомую величину.
Рассмотрим, как решаются такие задачи, когда несколько элементов соединены между собой в нелинейной цепи.
Последовательное соединение двух нелинейных элементов
Для расчета такой цепи (рис. 6.4, а) заданные вольт-амперные характеристики элементов и I(U1) и I(U2) строят в общей системе координат (рис. 6.4, б).
Далее строят вольт-амперную характеристику I(U) всей цепи, выражающую зависимость тока в цепи от общего напряжения.
Ток I обоих участков цепи одинаков, а общее напряжение U = U1 + U2.
Для построения общей вольт-амперной характеристики достаточно сложить абсциссы исходных кривых I(U1) и I(U2).
Проведем прямую, параллельную оси абсцисс и соответствующую току I1. Отрезки 1-2 и 1-3 в выбранном масштабе выражают напряжения U1, U2 на участках. Сложив эти отрезки, на той же прямой получим точку 4 общей вольт-амперной характеристики.
Для других значений тока аналогично найден еще ряд точек, через которые проведена общая вольт-амперная характеристика.
Построение вольт-амперных характеристик (рис. 6.4, б) является подготовительным этапом для решения различных задач, относящихся к подобным цепям. Требуется, например, определить ток в цепи и напряжения U1 и U2 на участках, если общее напряжение U известно.
На оси абсцисс находим точку 5, определяющую напряжение U (отрезок 0-5 в масштабе напряжений выражает напряжение в цепи). Через нее проводим перпендикуляр к оси абсцисс до пересечения с общей вольт-амперной характеристикой I(U) в точке 4. Из точки 4 проводим линию, параллельную оси абсцисс. Отрезок 5-4 выражает ток в цепи, а отрезки 1-2 и 1-3 — напряжения на участках (соответственно U1 и U2).
Параллельное соединение двух нелинейных элементов
При параллельном соединении двух нелинейных элементов (рис. 6.5, а) к ним приложено одно и то же напряжение U, а ток в неразветвленной части цепи равен сумме токов в ветвях: I = I1 + I2.
Для построения общей вольт-амперной характеристики I(U) нужно для ряда значений U сложить ординаты вольт-амперных характеристик элементов, как показано на рис. 6.5, б. При напряжении U1 (отрезок 0-1) сумма отрезков 1-2 (ток I1) и 1-3 (ток I2) равна отрезку 1-4 (ток I).
Предположим, что по заданному значению U = U1 нужно определить токи в ветвях и общий ток I. На оси абсцисс откладываем отрезок 0-1, выражающий напряжение U1, и через точку 1 проводим линию, параллельную оси ординат. Определяем точки 2, 3, 4 пересечения прямой с вольт-амперными характеристиками. Отрезки 1-2, 1-3, 1-4 в масштабе токов выражают токи в цепи I1, I2, I.
Аналогично решают задачи при параллельном соединении нелинейного элемента с линейным, а также при большем числе линейных и нелинейных элементов.
Смешанное соединение нелинейных элементов
При смешанном соединении нелинейных элементов графический расчет цепи производится методом «свертывания» схемы: в соответствии со схемой соединения элементов складываются их вольт-амперные характеристики.
Рассмотрим решение этой задачи применительно к схеме рис. 6.6, а.
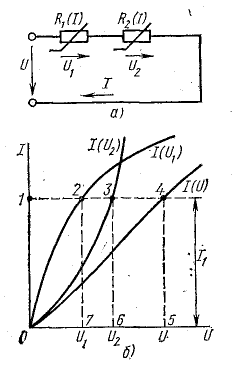
Рис. 6.4. К расчету нелинейной электрической цепи при последовательном соединении элементов
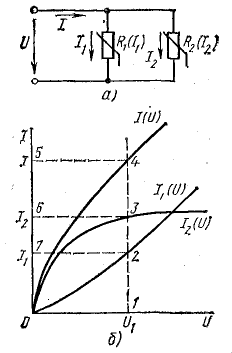
Рис. 6.5. К расчету нелинейной электрической цепи при параллельном соединении элементов
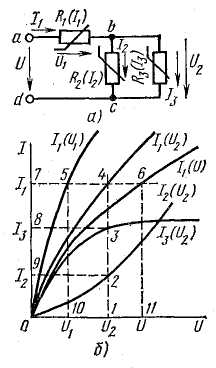
Рис. 6.6. К расчету нелинейной электрической цепи при смешанном соединении элементов
По заданным характеристикам I2(U2), I3(U3) параллельно соединенных элементов строится вольт-амперная характеристика участка цепи между точками b, c.
Для примера на рис. 6.6, б при напряжении U2 (отрезок 0-1) определены токи I2 (отрезок 1-2) и I3 (отрезок 1-3), а затем ток I1 = I2 + I3 (отрезок 1-4).
Далее строим вольт-амперную характеристику I1(U) всей цепи, учитывая, что участок цепи между точками b, c включен последовательно с нелинейным элементом на участке a-b. Для примера при токе I1 (отрезок 0-7) определены напряжения U1 (отрезок 7-5) и U2 (отрезок 7-4), а также общее напряжение U = U1 + U2 (отрезок 7-6).
После построения вольт-амперных характеристик порядок решения задачи зависит от ее условия. Пусть задано напряжение в цепи. Требуется определить токи в схеме и напряжения на участках.
Отложив на оси абсцисс отрезок 0-11, выражающий напряжение U, проведем линию 11-6 параллельно оси ординат до пересечения с кривой I1(U). Отрезком 11-6 определяется ток I1 в неразветвленной части цепи. Прямая, параллельная оси абсцисс, проведенная через точку 6, пересекает кривые I1(U1) и I2(U2) в точках 5 и 4. Отрезками 7-4 и 7-5 определяются напряжения U2 и U1 на участках. Напряжение U2 — общее для параллельно соединенных участков с токами I2 и I3. Для определения этих токов через точку 4 проводится прямая, параллельная оси ординат. Пересечение этой прямой с кривыми I2(U2) и I3(U2) в точках 2 и 3 дает отрезки 1-2 и 1-3, определяющие токи I2 и I3.
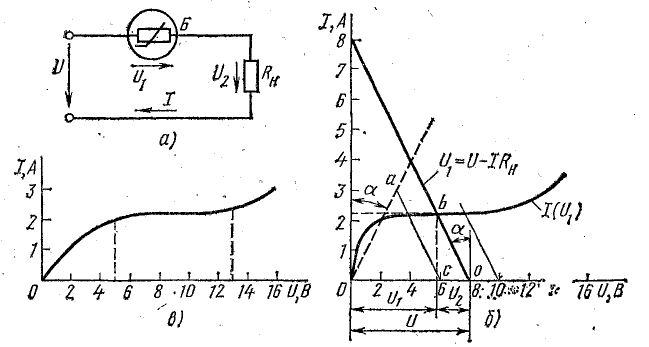
Рис. 6.7. К задаче 6.6
Задача 6.6.
Для поддержания постоянным тока нагрузки при колебаниях входного напряжения U последовательно с нагрузочным резистором Rн = 1 Ом (рис. 6.7, а) включен бареттер Б, вольт-амперная характеристика которого дана в табл. 6.2.
Таблица 6.2
| U, В | 0 | 0,5 | 1 | 2 | 4 | 6 | 8 | 10 | 12 | 14 |
| I, А | 0 | 1 | 1,6 | 2 | 2,1 | 2,15 | 2,2 | 2,25 | 2,5 | 3,2 |
Построить график изменения тока в цепи при изменении входного напряжения
Решение. Определим ток в цепи и напряжение на участках графически. Для этого на одном чертеже построим вольт-амперные характеристики бареттера и нагрузочного резистора (рис. 6.7, б), выбрав предварительно масштабы по обеим осям.
Для построения на миллиметровой бумаге рекомендуются масштабы:
напряжений mu = 2 В/см; токов mi = 1 А/см.
Вольт-амперная характеристика нагрузочного резистора — прямая, проходящая через начало координат под углом α к оси токов (см. пунктир Oa на рис. 6.7,6). Определим угол
Ток в цепи и падение напряжения U1 связаны между собой двумя зависимостями: вольт-амперной характеристикой нелинейного элемента I(U1) и уравнением  которое при постоянной величине Rн изображается на графике прямой. Точка пересечения этой прямой с вольт-амперной характеристикой нелинейного элемента на графике определяет величины I и U1, удовлетворяющие обеим зависимостям.
которое при постоянной величине Rн изображается на графике прямой. Точка пересечения этой прямой с вольт-амперной характеристикой нелинейного элемента на графике определяет величины I и U1, удовлетворяющие обеим зависимостям.
Построим указанную прямую при заданной величине Rн = 1 Ом и входном напряжении V = 8 В. Для этого определим положение точек, в которых прямая пересекается с осями координат:
при I = 0
при U1 = 0

Прямая, построенная по двум точкам, пересекается с вольт-амперной характеристикой нелинейного элемента в точке b.
Спроектируем эту точку на оси координат и найдем величины тока и напряжения на участках: I = 2.2 А; U1 = 5,8 В; U2 = 2,2 В. Аналогично находим те же величины для других напряжений U, для чего прямую перемещаем параллельно самой себе (на рис. 6.7, б показаны такие характеристики для U = 6 и 10 В).
График I(U) для заданной цепи построен на рис. 6.7, в. Из графика видно, что при изменении входного напряжения в пределах от 5до 13 В ток в цепи остается практически постоянным.
Примеры упрощения схем нелинейных цепей
Расчеты разветвленных нелинейных электрических цепей при наличии в схеме произвольного количества элементов представляют значительные трудности. В зависимости от вида схемы принимается тот или другой путь расчета, но во всех случаях основой является систематическое упрощение схемы. Рассмотрим некоторые конкретные примеры.
Цепь с двумя узлами
Между двумя узлами 1 и 2 (рис. 6.8) включены три ветви, две из которых представляют собой последовательное соединение нелинейного сопротивления и постоянной э. д. с.
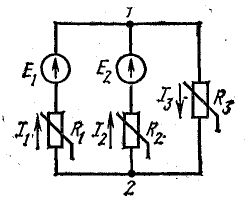
Рис. 6.8. Схема нелинейной электрической цепи с двумя узлами
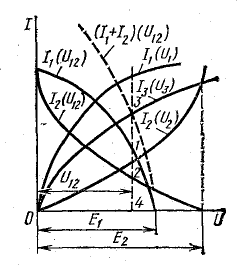
Рис. 6.9. К расчету нелинейной электрической цепи с двумя узлами
Нелинейные сопротивления заданы вольт-амперными характеристиками I1(U1); I2(U2); I3(U3) (рис. 6.9).
Ток каждой ветви можно выразить в зависимости от напряжения между узлами: U1.2 = Е1 — U1(I1); U1.2 = E2 — U2(I2); U1.2 = U3(I3).
Построение кривых I1(U1.2) и I2(U1.2) проводится так: для ряда значений тока определяют разность э. д. с. и соответствующих значений напряжения; через полученные точки проводят кривые. Кривая I3(U1.2) совпадает с заданной кривой I3(U3), так как U1.2 = U3.
Далее строится кривая (I1 + I2)(U1.2); для ряда значений U1.2 определяют сумму токов I1 + I2, которая согласно первому закону Кирхгофа равна I3 : I1 + I2 = I3.
Поэтому точка 3, в которой пересекаются кривые (I1 + I2) и I3(U3), определяет величину тока I3 (отрезок 3-4). Опустив перпендикуляр к оси U через точку 3, находят другие величины: ток I1 — отрезок 1-4; ток I2 — отрезок 2-4; напряжение U1.2 — отрезок 0-4.
Заметим, что кривая (I1 + I2)(U1.2) является вольт-амперной характеристикой нелинейного активного двухполюсника, эквивалентного двум ветвям исходной схемы. Построение этой кривой означает замену двух ветвей (1 и 2) одной ветвью, что является упрощением заданной схемы. Нетрудно представить, что такой путь можно применить при наличии в схеме большего числа ветвей и постепенно привести ее к схеме простейшего активного нелинейного двухполюсника.
Цепь с одним нелинейным сопротивлением
Предположим, что в разветвленную цепь входит несколько линейных элементов, в том числе источники э. д. с., и одно нелинейное сопротивление (рис. 6.10, а). Ветвь с нелинейным сопротивлением можно выделить, а оставшуюся линейную часть представить в виде активного двухполюсника.
Включим в нелинейную ветвь э.д.с. E’ такой величины, чтобы ток в ней уменьшился до нуля. Для активного линейного двухполюсника такое состояние является режимом холостого хода, поэтому Е’ = Ux, где Ux — напряжение холостого хода.
Для того чтобы получить ток, т. е. возвратиться к первоначальному режиму, можно в нелинейную ветвь включить еще одну э. д. с. Е”, равную по величине Е’, но направленную ей встречно (рис. 6.10., б). Можно сказать, что ток в нелинейной ветви вызывает только э. д. с. Е”, а остальные э. д. с. (Е’ и активного двухполюсника) тока не вызывают и их можно из схемы исключить, накоротко замкнув точки, к которым эти источники присоединены.
В результате получается схема последовательного соединения пассивного линейного двухполюсника с активным нелинейным двухполюсником (рис. 6.10, в).
Отсюда следует порядок расчета первоначально заданной нелинейной цепи: 1) определяют напряжение холостого хода и входное сопротивление линейного двухполюсника (рис. 6.10, г); 2) находят, например графически, ток и напряжение в нелинейной ветви; 3) определяют токи в линейной части цепи, считая сопротивление нелинейной ветви R = U/I постоянным.
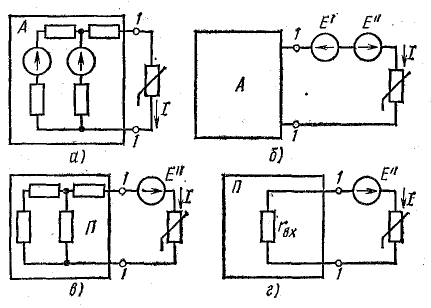
Рис. 6.10. К расчету разветвленной электрической цепи с одним нелинейным элементом
Цепь с двумя нелинейными сопротивлениями
В сложную цепь могут входить два нелинейных сопротивления, которые простым преобразованием не приводятся к одному сопротивлению (рис. 6.11, а).
Упрощение и расчет такой цепи можно осуществить в следующем порядке. Выделим нелинейные сопротивления, а оставшуюся часть цепи представим активным линейным четырехполюсником, у которого к первичным и вторичным зажимам присоединено по одному нелинейному сопротивлению.
В каждой нелинейной ветви можно провести преобразования, такие же как на рис. 6.10, и провести аналогичные рассуждения (рис. 6.11, б). В данном случае линейный четырехполюсник можно представить Т-образной схемой замещения и получить схему с двумя узлами, изображенную на рис. 6.11, в.
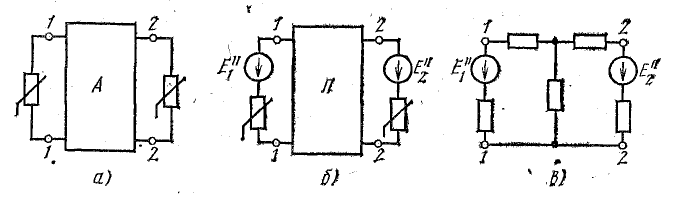
Рис. 6.11. К расчету разветвленной электрической цепи с двумя нелинейными элементами
Затем надо определить сопротивления Т-схемы четырехполюсника и решить задачу так, как указано в начале этого параграфа. При необходимости от Т-схемы четырехполюсника известными способами можно перейти к исходной схеме, считая при этом сопротивления нелинейных ветвей постоянными, так как токи в них найдены.
Подобный путь применяют для расчета цепей с тремя (и более) нелинейными сопротивлениями.
Метод последовательных приближений
Суть этого метода заключается в предварительном выборе ожидаемого результата и последовательной его проверке и уточнении.
Рассмотрим метод на примере относительно простой цепи последовательного соединения двух нелинейных сопротивлений рис. 6.4, а. Даны напряжение на зажимах цепи и вольт-амперные характеристики нелинейных элементов.
Ток в цепи по закону Ома

где n — порядковый номер приближения.
Первое значение тока I1 в цепи выбирают ориентировочно, если имеются для этого какие-то основания, а если их нет, то произвольно. По вольт-амперным характеристикам определяют напряжения на нелинейных элементах U1 и U2 и затем по закону Ома — сопротивления R1 и R2:

По формуле (6.6) находят второе приближение тока:

По найденной величине тока I2 и вольт-амперным характеристикам снова определяют напряжения на нелинейных элементах и их сопротивления, а затем опять находят ток и так до тех пор, пока результат на начнет практически повторяться. Обычно достаточно точный ответ достигается после 4-5 повторений расчета, если процесс приближений обладает сходимостью. В случае расходящегося процесса задачу следует решать на основе уравнения для другой величины [вместо (6.6)], например для напряжения на одном из нелинейных элементов

Задача 6.7.
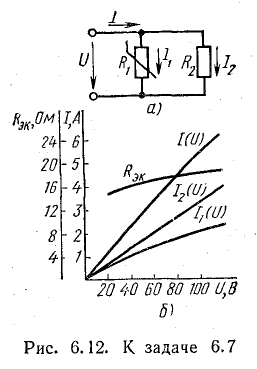
Лампа накаливания включена параллельно с линейным резистором R2 = 30 Ом (рис. 6.12, а). Построить зависимость эквивалентного сопротивления Rэк цепи от напряжения U на его зажимах.
Методом последовательных приближений определить напряжение U при токе в неразветвленной части цепи I = 5 А. Вольт-амперная характеристика лампы задана в табл. 6.3.
Таблица 6.3
| U, В | 0 | 20 | 40 | 60 | 80 | 100 | 120 |
| I, А | 0 | 0,6 | 1,1 | 1,5 | 1,85 | 2,15 | 2,4 |
Решение. Построим вольт-амперные характеристики элементов цепи. На рис. 6.12, б: I1(U) — характеристика лампы и I2(U) — характеристика резистора R2. Сложив ординаты этих характеристик при различных значениях напряжения, получим вольт-амперную характеристику всей цепи, т. е. зависимость тока в неразветвленной части цепи от приложенного напряжения I(U). Эквивалентное сопротивление схемы найдем как отношение Rэк = U/I для различных значений приложенного напряжения.
Результаты вычислений приведены на графике рис. 6.12, б.
Нелинейные электрические цепи постоянного тока
Нелинейными называются цепи, в которые включены нелинейные элементы (нэ).
Элемент электрической цепи, сопротивление которого зависит от чины и направления тока в нем или от напряжения, называется нелинейным. Нелинейными такие элементы называются потому, что их вольт-амперная характеристика (т. е. зависимость тока от напряжения, приложенного к элементу)  — нелинейная. Виды нелинейной зависимости показаны рис. 5.26, 5.36, 5.46 и др.
— нелинейная. Виды нелинейной зависимости показаны рис. 5.26, 5.36, 5.46 и др.
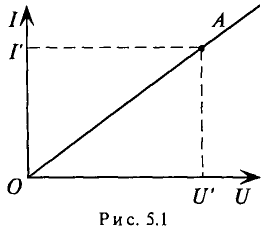
Примерами нелинейных элементов могут служить электронные газонаполненные лампы, полупроводниковые приборы, ламп накаливания и пр. нелинейную цепь наряду с нелинейными элементами могут быть включены линейные. Сопротивление линейных элементов практически не зависит от тока или напряжения (резистор). Вольт-амперная характеристика линейного элемента — прямая линия, ходящая через начало координат, точку О (рис. 5.1).
Вторую точку (точку А) для построения вольт-амперной характеристики линейного элемента определяют вычислением тока Г в линейном менте при произвольно выбранном напряжении U’, приложенном к этому элементу, т.е.  , где
, где  – заданное сопротивление линейного элемента — величина постоянная, аналитический расчет нелинейных цепей весьма сложен, так как противление нелинейного элемента — непостоянная величина, зависящая от величины тока. Таким образом, в уравнении закона Ома
– заданное сопротивление линейного элемента — величина постоянная, аналитический расчет нелинейных цепей весьма сложен, так как противление нелинейного элемента — непостоянная величина, зависящая от величины тока. Таким образом, в уравнении закона Ома  две переменные величины. Поэтому при расчете линейных цепей к нелинейным элементам не применим закон а ни для участка, ни для замкнутой нелинейной цепи.
две переменные величины. Поэтому при расчете линейных цепей к нелинейным элементам не применим закон а ни для участка, ни для замкнутой нелинейной цепи.
Для расчета нелинейных цепей рационально использовать графо-аналитический метод, который предусматривает построение суммарной вольт-амперной характеристики цепи. По суммарной характеристике и характеристикам элементов определяются искомые величины (обычно токи и напряжения).
Построение суммарной вольт-амперной характеристики нелинейной цепи зависит от схемы соединения элементов нелинейной цепи и производится по заданным вольт-амперным характеристикам нелинейных элементов и построенным характеристикам линейных элементов, если они включены в цепь.
Кроме того, если в нелинейной цепи имеется линейный элемент, то расчет нелинейной цепи можно производить построением так называемой нагрузочной характеристики (рис. 5.36).
Неразветвленная нелинейная цепь
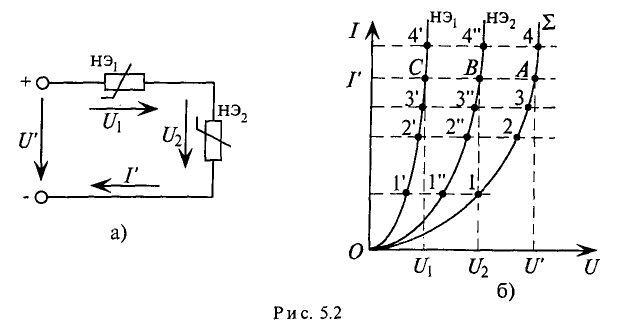
В неразветвленной нелинейной электрической цепи все элементы соединены последовательно и по всем элементам проходит одинаковый ток (рис. 5.2а).
Для расчета цепи с последовательно соединенными нелинейными элементами  по заданным вольт-амперными характеристикам этих элементов строится суммарная вольт-амперная характеристика нелинейной цепи (рис. 5.26).
по заданным вольт-амперными характеристикам этих элементов строится суммарная вольт-амперная характеристика нелинейной цепи (рис. 5.26).
При последовательном соединении элементов для построения суммарной вольт-амперной характеристики суммируются абсциссы (напряжения) вольт-амперных характеристик элементов при различных токах (например, в точках 1, 2, 3, 4 рис. 5.26).
Зная напряжение, приложенное к цепи ( ), по суммарной вольт-амперной характеристике (точка А) определяем ток в нелинейной цепи (
), по суммарной вольт-амперной характеристике (точка А) определяем ток в нелинейной цепи ( ). Этот ток создает падение напряжения на пер-элементе U1 (точка С) и на втором элементе U2 (точка В). и же задан ток
). Этот ток создает падение напряжения на пер-элементе U1 (точка С) и на втором элементе U2 (точка В). и же задан ток  в рассматриваемой цепи, то по суммарной вольт-амперной характеристике можно найти напряжение цепи (точка А) и напряжение на элементах
в рассматриваемой цепи, то по суммарной вольт-амперной характеристике можно найти напряжение цепи (точка А) и напряжение на элементах  (точки С и В). нелинейных элементов различают статическое
(точки С и В). нелинейных элементов различают статическое  и динамиков
и динамиков  сопротивления.
сопротивления.
Статическое сопротивление  – это сопротивление нелинейного элемента в режиме работы цепи, т. е. сопротивление нелинейного элемента в определенной точке его вольт-амперной характеристики.
– это сопротивление нелинейного элемента в режиме работы цепи, т. е. сопротивление нелинейного элемента в определенной точке его вольт-амперной характеристики.

Вычислить статические сопротивления нелинейных элементов в режиме работы рассматриваемой цепи, т. е. сопротивления для С и В вольт-амперных характеристик (при токе  рис 5.26), можно следующим образом:
рис 5.26), можно следующим образом:
Динамическое сопротивление нелинейных элементов ( ) в режиме работы цепи определяется как
) в режиме работы цепи определяется как

где  бесконечно малое приращение напряжения (определяет-по вольт-амперным характеристикам нелинейных элементов чек С и В), a dl – бесконечно малое приращение тока у этих чек.
бесконечно малое приращение напряжения (определяет-по вольт-амперным характеристикам нелинейных элементов чек С и В), a dl – бесконечно малое приращение тока у этих чек.
Вели в неразветвленную нелинейную цепь включен линейный элемент с заданным сопротивлением R, то для расчета такой нелинейной цепи можно произвести суммирование абсцисс (напряжений) всех элементов цепи, включая линейный, построив предварительно его вольт-амперную характеристику в той же системе ординат (рис. 5.1).
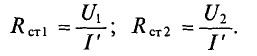
По суммарной вольт-амперной характеристике нелинейной пи определяется режим работы цепи и ее элементов. Для расчета нелинейной цепи с последовательно включенным линейным элементом с сопротивлением R (рис. 5.3а) можно воспользоваться построением нагрузочной характеристики рис. 5.36).
Нагрузочная характеристика представляет собой прямую линию, проведенную через две точки А и В (рис. 5.36). Точка А расположена на оси ординат (ток). Точка В- на оси абсцисс (напряжение).
Построение нагрузочной характеристики осуществляется с использованием двух уравнений (5.3 и 5.4) для рассматриваемой цепи в системе координат 

Откуда 
Точка В соответствует величинам  (см. (5.3)). Точка А соответствует величинам
(см. (5.3)). Точка А соответствует величинам  (см. (5.4)). При построении в тех же координатных осях заданной вольт-амперной характеристики нелинейного элемента отмечается точка пересечения С этих характеристик, которая является единственно возможной при заданном режиме работы цепи:
(см. (5.4)). При построении в тех же координатных осях заданной вольт-амперной характеристики нелинейного элемента отмечается точка пересечения С этих характеристик, которая является единственно возможной при заданном режиме работы цепи:
- отрезок DC – ток цепи
 ,
, - отрезок OD – напряжение на нелинейном элементе ,
- отрезок DB — напряжение на линейном элементе
 ,
, ,
,
Такой метод расчета неразветвленных нелинейных цепей называется методом пересечений.
На рис. 5.36 можно проследить изменения режима работы цепи ( ) при изменениях напряжения сети U’ (пунктирные линии). На том же рисунке показаны изменения режима работы цепи при изменении сопротивления линейного элемента R (перемещение точки С’ на рис. 5.36).
) при изменениях напряжения сети U’ (пунктирные линии). На том же рисунке показаны изменения режима работы цепи при изменении сопротивления линейного элемента R (перемещение точки С’ на рис. 5.36).
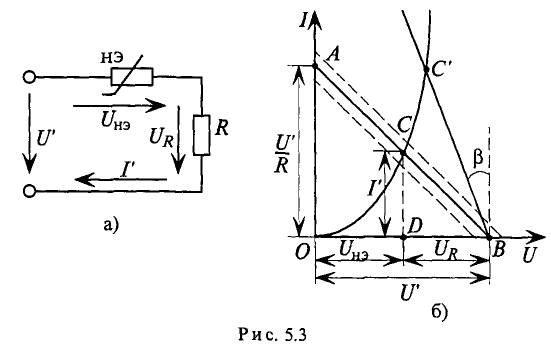
Если точка А, соответствующая измененному значению напряжения сети U’ или сопротивления линейного элемента R (см. (5.4)), выходит за пределы графика (рис. 5.36), то определяют  , который нагрузочная характеристика (прямая) составляет вертикалью, проведенной из точки В (на оси U), соответствующей напряжению сети U’, т. е.
, который нагрузочная характеристика (прямая) составляет вертикалью, проведенной из точки В (на оси U), соответствующей напряжению сети U’, т. е.
 – принятый на графике масштаб тока;
– принятый на графике масштаб тока;  – принятый на графике масштаб напряжения; U” – произвольно выбранное напряжение (например, U’); I” – ток, соответствующий напряжению U” и сопротивлению R”, т.е.:
– принятый на графике масштаб напряжения; U” – произвольно выбранное напряжение (например, U’); I” – ток, соответствующий напряжению U” и сопротивлению R”, т.е.:

Тогда нагрузочную характеристику из точки В доводят только до сечения с вольт-амперной характеристикой нелинейного мента (точка С’ рис. 5.36) и определяют режим работы цепи, соответствующий измененному значению сопротивления линейного элемента R или напряжения сети V.
Разветвленная нелинейная цепь
В разветвленной нелинейной электрической цепи нелинейные менты могут быть соединены параллельно. При параллельном соединении нелинейных элементов напряжение на всех элементах будет одинаковым.
Для расчета цепи с параллельным соединением нелинейных ментов  (рис. 5.4а) строится суммарная вольт-амперная характеристика цепи по заданным вольт-амперным характеристикам нелинейных элементов, при этом суммируются ординаты (токи), соответствующие различным значениям напряжений (точки 1, 2, 3, 4 на рис. 5.46).
(рис. 5.4а) строится суммарная вольт-амперная характеристика цепи по заданным вольт-амперным характеристикам нелинейных элементов, при этом суммируются ординаты (токи), соответствующие различным значениям напряжений (точки 1, 2, 3, 4 на рис. 5.46).
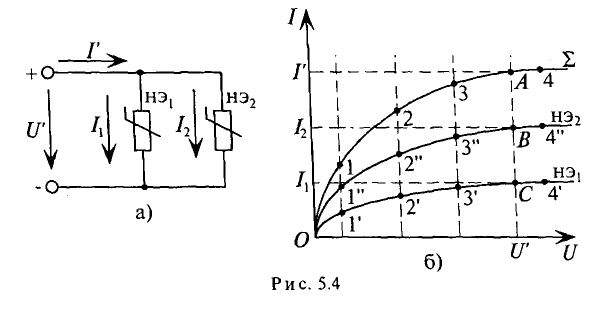
При заданном значении тока в неразветвленной части нелинейной цепи Г по суммарной вольт-амперной характеристике (точка А) можно определить напряжение цепи U’. Это напряжение создает ток в первом элементе  (точка С) и во втором элементе
(точка С) и во втором элементе  (точка В).
(точка В).
Если задано напряжение U’, приложенное к элементам, то по суммарной вольт-амперной характеристике определяется ток в неразветвленной части цепи (точка А), а по вольт-амперным характеристикам элементов определяются токи  (точки С и В рис. 5.46).
(точки С и В рис. 5.46).
Включение в нелинейную цепь линейного элемента не меняет характера и порядка расчета.
Нелинейная цепь со смешанным соединением элементов
Расчет нелинейной цепи при смешанном соединении элементов (в общем виде) рассмотрен на примере 5.1 (рис. 5.5).
Пример 5.1
По заданному напряжению цепи U’ требуется определить токи  , напряжения на участках
, напряжения на участках  (рис. 5.5а), а также сопротивления нелинейных элементов в заданном режиме работы цепи. Заданы вольт-амперные характеристики нелинейных элементов
(рис. 5.5а), а также сопротивления нелинейных элементов в заданном режиме работы цепи. Заданы вольт-амперные характеристики нелинейных элементов  (рис. 5.56) и сопротивление линейного элемента
(рис. 5.56) и сопротивление линейного элемента  .
.
Решение
По заданному сопротивлению Я линейного элемента строится вольт-амперная характеристика этого элемента (см. рис. 5.1). Линейный элемент с сопротивлением включен параллельно с нелинейным элементом  , и суммарная вольт-амперная характеристика для участка АВ цепи (
, и суммарная вольт-амперная характеристика для участка АВ цепи ( AB) строится так же, как на рис. 5.46 суммируются ординаты (токи) характеристик
AB) строится так же, как на рис. 5.46 суммируются ординаты (токи) характеристик  и R).
и R).
Участок АВ соединен последовательно с нелинейным элементом . Суммарная вольт-амперная характеристика цепи (I) строится так же, как на рис. 5.26.
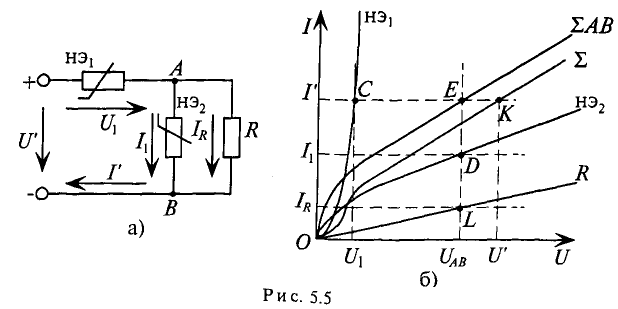
Напряжение цепи U’, по суммарной характеристике цепи К) определяется ток в неразветвленной части цепи рис. 5.56). Этот ток создает падение напряжения  (точка С) и на параллельном участке (точка Е).
(точка С) и на параллельном участке (точка Е).
Напряжение на участке АВ (UAB) в разветвленной цепи создает А (точка D) и (точка L).
Определив напряжения и токи нелинейных элементов, можно определить статические сопротивления этих элементов в заданном режиме работы цепи
Таким образом, по вольт-амперным характеристикам соединен-смешанно элементов и их суммарным характеристикам можно определить все параметры нелинейной цепи ( ), если задан хотя бы один из этих параметров (рис. 5.56).
), если задан хотя бы один из этих параметров (рис. 5.56).
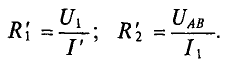
Стабилизаторы тока и напряжения
Есть такие нелинейные элементы, вольт-амперная характеристика которых имеет участки, параллельные оси абсцисс или оси ординат (рис. 5.6). Такие нелинейные элементы применяют в качестве стабилизаторов тока (рис. 5.6а) и стабилизаторов напряжения ис. 5.66).
В качестве стабилизатора тока можно использовать, например бареттер (стальная нить в атмосфере водорода). На участке В’В’ (рис. 5.6а) характеристика бареттера почти параллельна оси абсцисс. Если бареттер включить последовательно с участком (io цепи (рис. 5.8), то ток  цепи почти не изменяется при изменении напряжения или сопротивления (рис. 5.6а) — бареттер стабилизирует ток в цепи.
цепи почти не изменяется при изменении напряжения или сопротивления (рис. 5.6а) — бареттер стабилизирует ток в цепи.
Эффективность стабилизации характеризует коэффициент стабилизации, показывающий, во сколько раз относительное изменение тока  меньше относительного изменения напряжения
меньше относительного изменения напряжения  :
:
Для стабилизации напряжения применяют газоразрядные или полупроводниковые (кремниевые) стабилизаторы. Рабочий участок В’В” вольт-амперной характеристики стабилизатора напряжения почти параллелен оси ординат (рис. 5.66). Стабилизатор напряжения включается параллельно сопротивлению  , на котором он стабилизирует напряжение.
, на котором он стабилизирует напряжение.
Последовательно с разветвленным участком (ab) включается балластное сопротивление  (рис. 5.7). Как видно из рис. 5.66, изменение балластного сопротивления в определенных пределах от
(рис. 5.7). Как видно из рис. 5.66, изменение балластного сопротивления в определенных пределах от  почти не вызывает изменения напряжения на стабилизаторе и, следовательно, на нагрузке R (Uaь на рис. 5.7).
почти не вызывает изменения напряжения на стабилизаторе и, следовательно, на нагрузке R (Uaь на рис. 5.7).
Пример 5.2
Для стабилизации напряжения и тока накала электронной лампы (4 В; I А) включен бареттер Б (рис. 5.8а), вольт-амперная характеристика которого приведена на рис. 5.86.
Определить все токи и напряжения на бареттере U1 и нити накала U2, если напряжение сети  , а сопротивление
, а сопротивление  . Определить пределы изменения напряжений сети, при которых ток цепи
. Определить пределы изменения напряжений сети, при которых ток цепи остается практически неизменным.
остается практически неизменным.
Решение
Масштаб напряжения на графике 
Масштаб тока на графике принят 
Нагрузочная характеристика строится в координатах:
 , где сопротивление нити накала лампы
, где сопротивление нити накала лампы  Ом.
Ом.
Следовательно, точка пересечения вольт-амперной характеристики бареттера и нагрузочной характеристики В (рис. 5.86) сет координаты  , а ток цепи
, а ток цепи  . Напряжение R
. Напряжение R  , а токи
, а токи 
Нагрузочная характеристика проведена под углом  к оси орди-т. е.
к оси орди-т. е.

Нагрузочные характеристики, соответствующие пределам изменил напряжений сети, при которых ток цепи  остается практики неизменным (
остается практики неизменным ( ), проводятся параллельно основной нагрузочной характеристике под углами
), проводятся параллельно основной нагрузочной характеристике под углами  к оси ординат.
к оси ординат.
Таким образом, как следует из графиков рис. 5.86, эти напряжения соответственно равны

Определение нелинейных электрических цепей переменного тока
Нелинейные элементы
Нелинейными электрическими цепями переменного тока называются цепи, в состав которых входят один или несколько нелинейных сопротивлений (нелинейных элементов) переменного тока.
Характерной чертой нелинейных элементов переменного тока являются нелинейная вольт-амперная, кулон-вольтовая, вебер-амперная и другие характеристики.
Переменному току оказывают сопротивление активные сопротивления, индуктивности и емкости. В соответствии с этим нелинейные сопротивления переменного тока могут быть разделены на три группы: 1) группа нелинейных активных сопротивлений; 2) группа нелинейных индуктивных сопротивлений; 3) группа нелинейных емкостных сопротивлений.
Каждая из этих групп сопротивлений подразделяется на управляемые и неуправляемые.
- В качестве управляемых нелинейных активных сопротивлений широкое распространение получили электронные и полупроводниковые приборы, магнитные усилители и другие устройства. Неуправляемыми нелинейными активными сопротивлениями являются электрическая дуга, полупроводниковые выпрямители, лампы накаливания и др. Нелинейные элементы этой группы способствуют созданию несинусоидальных токов в электрических цепях.
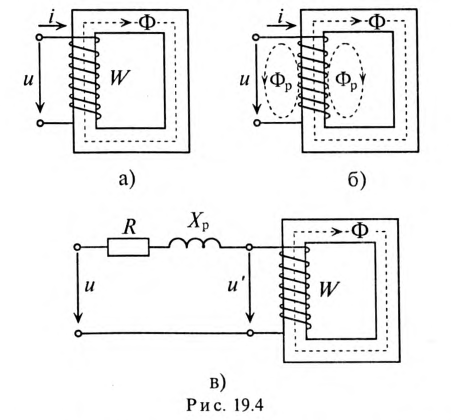
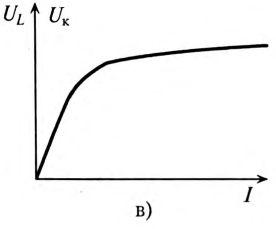
- Под нелинейными индуктивными сопротивлениями, или иначе нелинейными индуктивностями, понимают катушки с ферромагнитными сердечниками, для которых зависимость магнитного потока в сердечнике от тока в катушке нелинейна. Катушка с ферромагнитным сердечником в цепи переменного тока искажает форму кривой тока, т. е. является генератором несинусоидального тока. Катушку со стальным сердечником называют дросселем (рис. 19.4).
- Для нелинейных конденсаторов зависимость заряда Q на обкладках от напряжения, приложенного к конденсатору, нелинейна. Нелинейные конденсаторы называют варикоидами или вари капами. Пространство между обкладками нелинейного конденсатора заполнено сегнетодиэлектриком, диэлектрическая проницаемость которого зависит от напряженности электрического поля между обкладками конденсатора. Сегнетодиэлектрики обладают гистерезисом, т.е. отставанием изменения электрического смещения в диэлектрике от изменения электрического поля в нем.
Такие явления, как выпрямление переменного тока в постоянный, стабилизация напряжения, умножение и деление частоты, получение сигналов различной формы и т. д., можно получить только в нелинейных цепях переменного тока.
В настоящей главе рассматривается работа двух нелинейных элементов: вентили (1-я группа нелинейных активных сопротивлений) и катушки с ферромагнитным сердечником (2-я группа нелинейных индуктивных сопротивлений).
Выпрямители – источники несинусоидального тока
Выпрямителями называют аппараты, преобразующие переменный ток в постоянный.
Основным элементом любого выпрямителя является электрический вентиль. Электрический вентиль обладает малым сопротивлением в прямом направлении и большим в обратном направлении. Вентиль имеет нелинейную вольт-амперную характеристику (рис. 19.1), поскольку обладает практически односторонней проводимостью. Графическое изображение электрического вентиля в электрических схемах и положительное направление прямого напряжения и тока показано на рис. 19.1а.
Вентиль, сопротивление которого в прямом направлении равно нулю, а в обратном – бесконечно большое, считается идеальным вентилем. Характеристика идеального вентиля дана на рис. 19.1б. Вентиль, сопротивлением которого в прямом направлении пренебречь нельзя, а обратным током можно пренебречь, имеет вольт-амперную характеристику, изображенную на рис. 19.1в. Вольт-амперная характеристика реального полупроводникового вентиля изображена на рис. 19.1г.
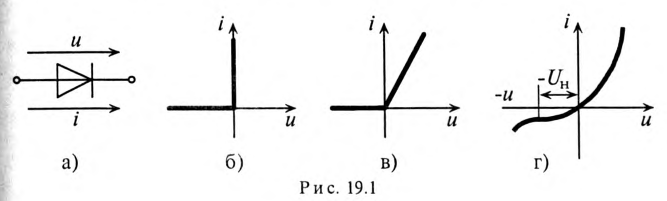
Как видно, если к реальному вентилю приложено увеличивающееся по величине обратное напряжение  то его ток в обратном направлении увеличивается незначительно. Однако когда это обратное напряжение превышает номинальное
то его ток в обратном направлении увеличивается незначительно. Однако когда это обратное напряжение превышает номинальное  обратный ток становится ощутимым и при некотором обратном предельном напряжении вентиль теряет свои вентильные свойства.
обратный ток становится ощутимым и при некотором обратном предельном напряжении вентиль теряет свои вентильные свойства.
Основными параметрами вентилей наряду с вольт-амперной характеристикой являются допустимая температура, плотность тока и допустимое обратное напряжение.
В выпрямителях вентиль включается по различным схемам.
В схеме однополупериодного выпрямителя вентиль включается последовательно с потребителем R, ток которого необходимо выпрямить (рис. 19.2а).
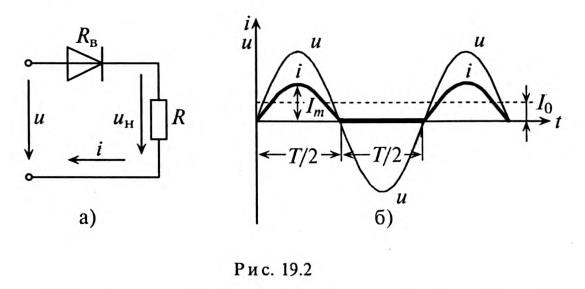
Если к цепи, изображенной на рис. 19.2а, приложено синусоидальное напряжение  (и обратным током вентиля можно пренебречь), то ток в положительный полупериод изменяется также по синусоидальному закону:
(и обратным током вентиля можно пренебречь), то ток в положительный полупериод изменяется также по синусоидальному закону:

В течение же отрицательного полупериода напряжения  тока в цепи нет, так как предполагается
тока в цепи нет, так как предполагается  Таким образом, в рассматриваемой цепи создается однополупериодное выпрямление синусоидального тока (рис. 19.2б). При однополупериодном выпрямлении образуется значительная пульсация тока, т.е. большая переменная составляющая (гармоника) выпрямленного тока и незначительная величина среднего значения (постоянная составляющая) этого тока
Таким образом, в рассматриваемой цепи создается однополупериодное выпрямление синусоидального тока (рис. 19.2б). При однополупериодном выпрямлении образуется значительная пульсация тока, т.е. большая переменная составляющая (гармоника) выпрямленного тока и незначительная величина среднего значения (постоянная составляющая) этого тока  (см. кривую 5 таблицы 18.1).
(см. кривую 5 таблицы 18.1).
Таким образом, на сопротивлении R в результате выпрямления синусоидального напряжения и создается несинусоидальный ток и несинусоидальное напряжение 
Если вентили включены по мостовой схеме (рис. 19.3а) и к мосту подведено синусоидальное напряжение  то по сопротивлению потребителя R проходит несинусоидальный пульсирующий ток, полученный в результате двухполупериодного выпрямления (рис. 19.3б).
то по сопротивлению потребителя R проходит несинусоидальный пульсирующий ток, полученный в результате двухполупериодного выпрямления (рис. 19.3б).
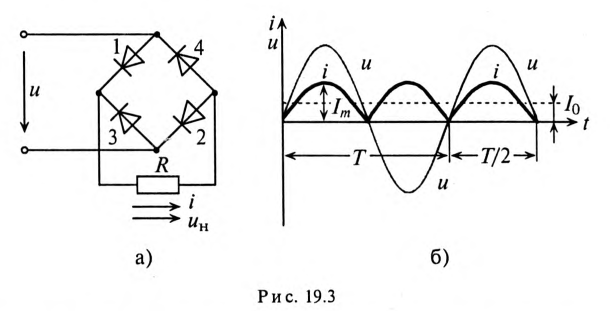
В положительный полупериод синусоидального напряжения и ток проходит через вентили 1, 2 и через потребитель слева направо (рис. 19.3а). В отрицательный полупериод напряжения и ток проходит через вентили 3, 4 и через потребитель также слева направо. Таким образом, ток через потребитель изменяется по величине, но не меняется по направлению (рис. 19.3б), т.е. через потребитель проходит пульсирующий ток, который складывается из постоянной составляющей и четных гармоник. Таким же будет и напряжение  на потребителе (см. кривую 6 таблицы 18.1). При двухполупериодном выпрямлении постоянная составляющая несинусоидального тока и напряжения больше, чем при однополупериодном выпрямлении, а пульсации, т.е. гармоники, меньше.
на потребителе (см. кривую 6 таблицы 18.1). При двухполупериодном выпрямлении постоянная составляющая несинусоидального тока и напряжения больше, чем при однополупериодном выпрямлении, а пульсации, т.е. гармоники, меньше.
При выпрямлении трехфазного тока (см. кривую 7 таблицы 18.1) несинусоидальный ток раскладывается на постоянную составляющую и гармоники, кратные трем, т. е. 3, 6, 9 и т.д. При этом постоянная составляющая тока (напряжения) на потребителе увеличивается, а пульсации уменьшаются (по сравнению с однофазным током). Для уменьшения пульсаций на потребителе в любой схеме соединения вентилей используются электрические фильтры (см. § 18.7).
Катушка с ферромагнитным сердечником
Наиболее распространенным нелинейным элементом переменного тока в электрических машинах, трансформаторах и других аппаратах является катушка со стальным сердечником (рис. 19.4).
Если магнитный поток в сердечнике изменяется по синусоидальному закону  то при отсутствии рассеяния он индуктирует в катушке, расположенной на сердечнике, ЭДС самоиндукции
то при отсутствии рассеяния он индуктирует в катушке, расположенной на сердечнике, ЭДС самоиндукции

Если пренебречь активным сопротивлением катушки, то напряжение, приложенное к ней, равно по величине и противоположно по знаку ЭДС самоиндукции, определяемой по (11.9):

где  , а действующее значение напряжения
, а действующее значение напряжения
или 
Если к катушке со стальным сердечником приложено синусоидальное напряжение, то в сердечнике возникает синусоидальный магнитный поток.
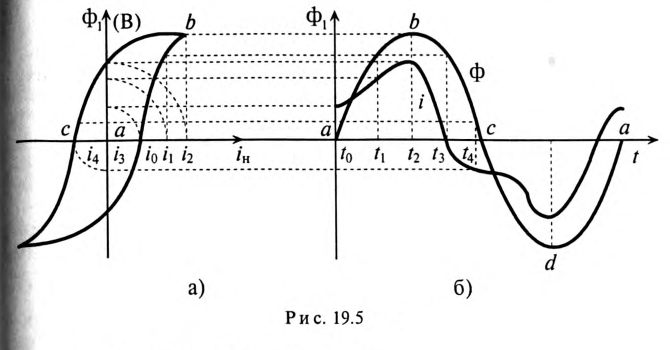
Ток в катушке при этом оказывается несинусоидальным. Это связано с нелинейной зависимостью между магнитим потоком и током  На рис. 19.5а показана петля гистере-1иса, изображающая эту зависимость.
На рис. 19.5а показана петля гистере-1иса, изображающая эту зависимость.
Для каждого момента времени 
 по петле гистерезиса находят значение тока и откладывают его на ординате магнитного потока (смотри пунктирные линии на рис. 19.5). При увеличении магнитного потока пользуются участком ab петли гистерезиса, при уменьшении — участком be и т. д.
по петле гистерезиса находят значение тока и откладывают его на ординате магнитного потока (смотри пунктирные линии на рис. 19.5). При увеличении магнитного потока пользуются участком ab петли гистерезиса, при уменьшении — участком be и т. д.
Как видно (рис. 19.56), кривая тока при синусоидальном магнитном потоке несинусоидальна.
Кривая намагничивания ферромагнитного материала (рис. 8.3) выражает зависимость индукции В в ферромагнитном материале от напряженности Я магнитного поля в катушке. Напряженность Н в катушке пропорциональна току I в катушке. Магнитный поток в ферромагнитном материале  связан с напряжением
связан с напряжением  , приложенным к катушке, прямой пропорциональностью (19.1). Следовательно, основную кривую намагничивания ферромагнитного материала магнитопровода
, приложенным к катушке, прямой пропорциональностью (19.1). Следовательно, основную кривую намагничивания ферромагнитного материала магнитопровода  можно считать вольт-амперной характеристикой катушки с сердечником из ферромагнитного материала (рис. 8.3), если изобразить ее в координатах
можно считать вольт-амперной характеристикой катушки с сердечником из ферромагнитного материала (рис. 8.3), если изобразить ее в координатах  и I (рис. 19.5в). Таким образом, катушка с ферромагнитным сердечником является нелинейным элементом переменного тока, т. е. источником несинусоидальности.
и I (рис. 19.5в). Таким образом, катушка с ферромагнитным сердечником является нелинейным элементом переменного тока, т. е. источником несинусоидальности.
Мощность потерь. Векторная диаграмма катушки со стальным сердечником
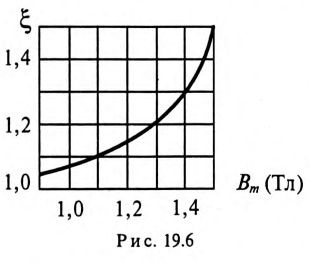
При расчете цепи катушки со стальным сердечником несинусоидальный намагничивающий ток  часто заменяют эквивалентным синусоидальным, который имеет то же действующее значение, что и несинусоидальный. При этой замене пользуются поправочным коэффициентом
часто заменяют эквивалентным синусоидальным, который имеет то же действующее значение, что и несинусоидальный. При этой замене пользуются поправочным коэффициентом  зависящим от формы кривой тока, которая в свою очередь зависит от максимального значения индукции в сердечнике
зависящим от формы кривой тока, которая в свою очередь зависит от максимального значения индукции в сердечнике 
Значение коэффициента  для электротехнической стали при индукции, не превышающей
для электротехнической стали при индукции, не превышающей  принимается равным единице. При больших значениях магнитной индукции поправочный коэффициент можно найти по графику (рис. 19.6).
принимается равным единице. При больших значениях магнитной индукции поправочный коэффициент можно найти по графику (рис. 19.6).
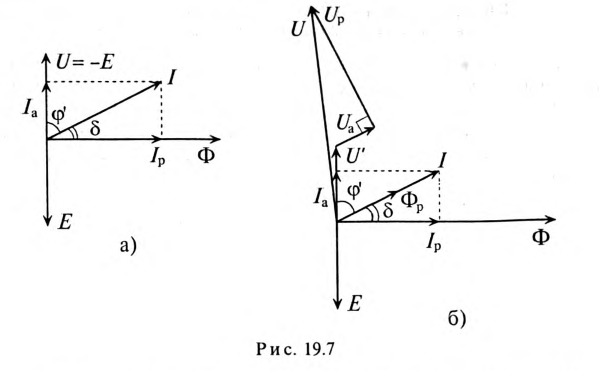
При синусоидальном токе векторная диаграмма для катушки (без активного сопротивления) со стальным сердечником (без рассеяния) может быть построена как для идеальной индуктивности (рис. 11.4б), т. е. ток отстает от напряжения на угол 90°.
Если учесть потери на циклическое перемагничивание в сердечнике  и на вихревые токи
и на вихревые токи  т.е. потери в стали
т.е. потери в стали  то ток в катушке со стальным сердечником отстает от напряжения на угол
то ток в катушке со стальным сердечником отстает от напряжения на угол  (рис. 19.7а). При этом появляется активная составляющая тока
(рис. 19.7а). При этом появляется активная составляющая тока

совпадающая по фазе с напряжением, и реактивная составляющая тока

Реактивная составляющая тока, совпадающая по фазе с магнитным потоком и намагничивающая сердечник, называется намагничивающим током катушки.
Угол  на который ток
на который ток  опережает по фазе магнитный поток Ф (рис. 19.7а), называется углом потерь
опережает по фазе магнитный поток Ф (рис. 19.7а), называется углом потерь

Потери в стали (магнитные потери) можно определить выражением

где G — масса ферромагнитного сердечника, кг;  — удельная мощность потерь в стали, Вт/кг.
— удельная мощность потерь в стали, Вт/кг.
Удельную мощность потерь вычисляют по формуле

где  — потери в стали при индукции
— потери в стали при индукции  1 Тл и частоте
1 Тл и частоте  – максимальное значение индукции.
– максимальное значение индукции.
Значения  для различных марок электротехнической стали даны в Приложении 8.
для различных марок электротехнической стали даны в Приложении 8.
Если не пренебрегать активным сопротивлением катушки R, то падение напряжения на этом сопротивлении  совпадает по фазе с током
совпадает по фазе с током  На активном сопротивлении возникают потери мощности, которые являются электрическими потерями и называются потерями в меди
На активном сопротивлении возникают потери мощности, которые являются электрическими потерями и называются потерями в меди  Эти потери складываются с магнитными и создают суммарные потери в катушке со стальным сердечником
Эти потери складываются с магнитными и создают суммарные потери в катушке со стальным сердечником  Суммарные потери Р влияют на угол потерь
Суммарные потери Р влияют на угол потерь  и на активную составляющую тока катушки
и на активную составляющую тока катушки  так как
так как 
Большая часть магнитного потока, т. е. основной поток Ф, замыкается в сердечнике, а незначительная часть потока  рассеивается (рис. 19.46). Поток рассеяния
рассеивается (рис. 19.46). Поток рассеяния  индуктирует в катушке ЭДС рассеяния
индуктирует в катушке ЭДС рассеяния  где
где  — индуктивность рассеяния. На преодоление ЭДС рассеяние в напряжении, приложенном к катушке, появляется составляющая
— индуктивность рассеяния. На преодоление ЭДС рассеяние в напряжении, приложенном к катушке, появляется составляющая  которая опережает ток на угол 90°. Поток рассеяния
которая опережает ток на угол 90°. Поток рассеяния  совпадает по фазе с током.
совпадает по фазе с током.
Следовательно, напряжение на зажимах катушки со стальным сердечником складывается из напряжения  создается основным магнитным потоком Ф, падения напряжения на активном сопротивлении катушки
создается основным магнитным потоком Ф, падения напряжения на активном сопротивлении катушки  и напряжения
и напряжения  т.е.
т.е.  Это выражение используется при построении векторной диаграммы катушки со стальным сердечником (рис. 19.7б).
Это выражение используется при построении векторной диаграммы катушки со стальным сердечником (рис. 19.7б).
Схема замещения
Эквивалентная схема катушки со стальным сердечником изображена на рис. 19.4в. На эквивалентной схеме выделены активное сопротивление R и индуктивное сопротивление рассеяния  Оставшуюся катушку с сердечником можно считать идеальной.
Оставшуюся катушку с сердечником можно считать идеальной.
Напряжение  для идеальной катушки можно представить суммой падений напряжений на активном сопротивлении
для идеальной катушки можно представить суммой падений напряжений на активном сопротивлении  и индуктивном
и индуктивном 
Эти соображения легли в основу построения схемы замещения катушки со стальным сердечником (рис. 19.8а).
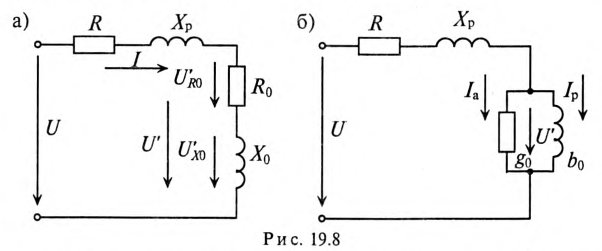
Реальная катушка (рис. 19.4а) и схема ее замещения (рис. 19.8б) при одинаковых напряжениях на зажимах U имеют одинаковые токи и мощности.
Активная составляющая тока определяет активную проводимость идеальной катушки  а намагничивающий ток – реактивную проводимость
а намагничивающий ток – реактивную проводимость  На рис. 19.86 показана схема замещения катушки со стальным сердечником с учетом этих проводимостей.
На рис. 19.86 показана схема замещения катушки со стальным сердечником с учетом этих проводимостей.
Пример 19.1
На среднем стержне Ш-образного магнитопровода (рис. 19.9), выполненного из листовой  стали Э42 (1512) с воздушным зазором
стали Э42 (1512) с воздушным зазором  расположена обмотка, к которой подведено напряжение U= 220 В при частоте
расположена обмотка, к которой подведено напряжение U= 220 В при частоте  10 % объема сердечника заполнено изоляцией. Активным сопротивлением обмотки и рассеянием можно пренебречь. Размеры магнитопровода указаны в мм.
10 % объема сердечника заполнено изоляцией. Активным сопротивлением обмотки и рассеянием можно пренебречь. Размеры магнитопровода указаны в мм.
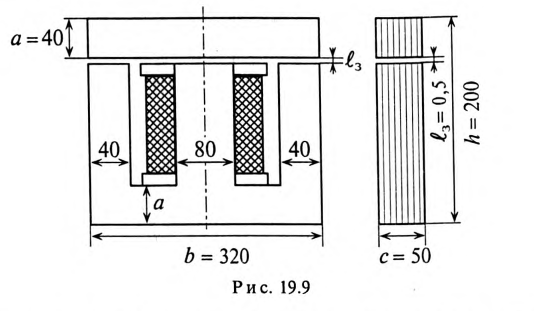
Определить число витков обмотки W, ток в обмотке  потери в стали
потери в стали  коэффициент мощности цепи coscp и угол потерь
коэффициент мощности цепи coscp и угол потерь  для того, чтобы создать максимальную магнитную индукцию в среднем стержне
для того, чтобы создать максимальную магнитную индукцию в среднем стержне 
Решение
По выражению (19.1) определяется число витков обмотки

где 
 – площадь сечения среднего стержня сердечника;
– площадь сечения среднего стержня сердечника;  — коэффициент заполнения сердечника сталью,
— коэффициент заполнения сердечника сталью, 
Расчет намагничивающего тока  произведен по закону полного тока для половины симметричной магнитной цепи. Сечение всех участков половины магнитной цепи
произведен по закону полного тока для половины симметричной магнитной цепи. Сечение всех участков половины магнитной цепи  одинаковое (рис. 19.9) и определяется по формуле
одинаковое (рис. 19.9) и определяется по формуле

Длина средней линии половины сердечника

Напряженность магнитного поля в магнитопроводе (Приложение 5) для стали Э42 (1512)  так как действующее значение заданной индукции
так как действующее значение заданной индукции  а в Приложении 5 указаны действующие значения магнитной индукции. Напряженность в воздушном зазоре
а в Приложении 5 указаны действующие значения магнитной индукции. Напряженность в воздушном зазоре  будет равна
будет равна

Поправочный коэффициент  для максимальной индукции
для максимальной индукции  определяется из графика (рис. 19.6),
определяется из графика (рис. 19.6),  Тогда намагничивающий ток
Тогда намагничивающий ток  определяется по формуле
определяется по формуле
Масса стали сердечника

где  — плотность стали.
— плотность стали.
Потери в стали

где  так как для стали Э42 при толщине листов
так как для стали Э42 при толщине листов  (Приложение 8).
(Приложение 8).
Активная составляющая тока обмотки обусловлена этими потерями, т. е.
Ток в обмотке (рис. 19.7) будет равен

Коэффициент мощности цепи  угол
угол  а угол потерь
а угол потерь 
Феррорезонанс
В цепи с нелинейной индуктивностью (катушка со стальным сердечником) существует нелинейная зависимость напряжения на индуктивности  от тока
от тока  (рис. 19.5в). Следовательно, резонанса напряжений, т. е. равенства напряжений на емкости
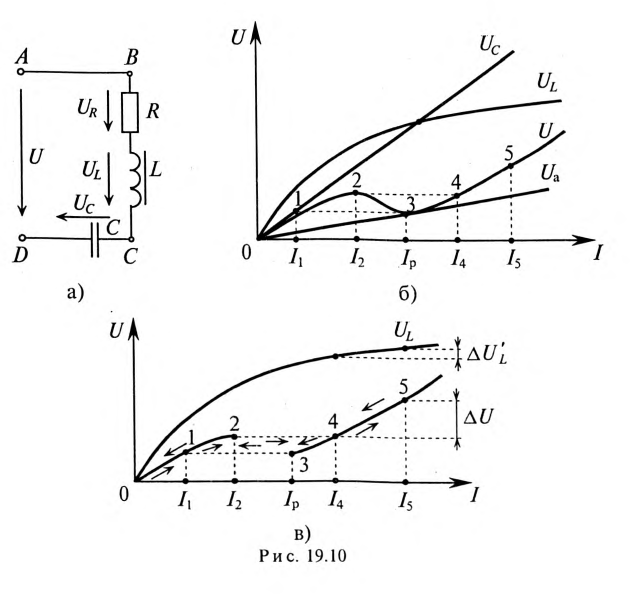
(рис. 19.5в). Следовательно, резонанса напряжений, т. е. равенства напряжений на емкости  и индуктивности , можно добиться изменением тока при последовательном соединении конденсатора и нелинейной индуктивности (рис. 19.10а).
и индуктивности , можно добиться изменением тока при последовательном соединении конденсатора и нелинейной индуктивности (рис. 19.10а).
Цепи, содержащие нелинейную индуктивность и линейную емкость, называют феррорезонансными, а явление равенства напряжений  описанное выше, называют феррорезонансом.
описанное выше, называют феррорезонансом.
Для объяснения явления феррорезонанса можно воспользоваться вольт-амперной характеристикой нелинейной индуктивности  линейной емкости
линейной емкости  и линейного активного сопротивления
и линейного активного сопротивления 
При построении суммарной вольт-амперной характеристики
рассматриваемой цепи исходят из того, что напряжение источника U уравновешивается суммой напряжений:

Из векторной диаграммы для рассматриваемой цепи (рис. 12.46) следует, что индуктивное напряжение UL опережает по фазе ток на угол 90°, а емкостное напряжение Uc — отстает на 90 (Для упрощения несинусоидальные величины заменены эквивалентными синусоидальными, т. е. вольт-амперная характеристика нелинейной катушки UL=f(I) аналогична характеристике, показанной на рис. 19.5в.) Следовательно,, реактивные напряжения UL и Uc находятся в противофазе, т. е. Up = UL – Uc.
Величину емкости можно подобрать так, чтобы прямая Uc=f(I) пересекла кривую UL=f(I). Точка их пересечения и является том кой феррорезонанса напряжений (UL = Uc), при котором Up = UL – Uс =0. Следовательно,  (Up – реактивное напряжение цепи).
(Up – реактивное напряжение цепи).
Из графика (рис. 19.106) следует, что с увеличением тока I напряжение U сначала растет (участок 0—2), затем уменьшается (участок 2—3), достигая минимального значения при феррорезонансе (точка 3), затем снова растет (участок 3—5).
Из того же графика видно, что при непрерывном увеличении напряжения источника U ток плавно увеличивается до значения  и скачком увеличивается до
и скачком увеличивается до  , после чего продолжает плав но расти (участок 4—5).
, после чего продолжает плав но расти (участок 4—5).
При плавном уменьшении напряжения U ток  уменьшается до
уменьшается до  и скачком уменьшается до /ь затем плавно падает до нуля (при U= 0).
и скачком уменьшается до /ь затем плавно падает до нуля (при U= 0).
Характерно, что при каждом скачке тока  его фаза по отношению к напряжению Uизменяется на 180°, поэтому это явление называют «опрокидыванием фазы». «Опрокидывание фазы» в феррорезонансной цепи происходит потому, что до значения тока цепь имеет индуктивный характер, т. е. XL > Хс, а после значения тока — емкостной, т.е. XLC (рис. 19.105). Вызвано это тем, что после феррорезонанса происходит магнитное насыщение сердечника катушки, стабилизируется XL и UL, а I растет.
его фаза по отношению к напряжению Uизменяется на 180°, поэтому это явление называют «опрокидыванием фазы». «Опрокидывание фазы» в феррорезонансной цепи происходит потому, что до значения тока цепь имеет индуктивный характер, т. е. XL > Хс, а после значения тока — емкостной, т.е. XLC (рис. 19.105). Вызвано это тем, что после феррорезонанса происходит магнитное насыщение сердечника катушки, стабилизируется XL и UL, а I растет.
Явление «опрокидывания фазы» проиллюстрировано на рис. 19.10в, на котором показаны кривые напряжений U=f(I) и UL =f(I). Из кривой UL =f(I) видно, что напряжение на выводах катушки (точки В и С схемы — рис. 19.10а) остается почти неизменным ( ) даже при значительном изменении (
) даже при значительном изменении ( ) напряжения сети U (точки А и D), если незначительным значением напряжения
) напряжения сети U (точки А и D), если незначительным значением напряжения  можно пренебречь.
можно пренебречь.
Это явление используется в феррорезонансных стабилизаторах напряжения, в которых значительное изменение входного напряжения () на клеммах AD вызывает незначительное изменение выходного напряжения ( ) на клеммах ВС, к которому подключен потребитель.
) на клеммах ВС, к которому подключен потребитель.
При параллельном соединении катушки с ферромагнитным сердечником и конденсатора может возникнуть феррорезонанс токов, если 
Элементы нелинейных цепей, их характеристики и параметры
Все ранее выполненные исследования касались анализа режима работы линейных электрических цепей. В их составе присутствовали исключительно линейные элементы, ток и напряжение в которых были связаны линейным уравнением. В подавляющем большинстве реальных цепей зависимость тока от напряжения в большей или меньшей степени отлична от линейной и в этом случае говорят о нелинейных цепях.
Цепь считается нелинейной, если емкость, сопротивление или индуктивность любого участка является функцией напряжения и тока, а также их направления. Особо подчеркнем, что принцип наложения в таких цепях неприменим. В отличие от линейных элементов, характеристики которых задаются аналитическими функциями, нелинейные задаются экспериментальными зависимостями, с помощью таблиц или приближенными эмпирическими формулами. Все это усложняет расчет цепей и требует специальных методов расчета.
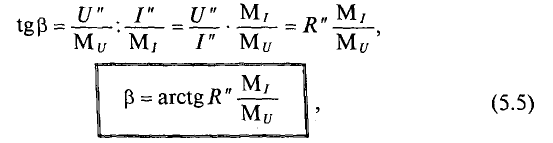
Нелинейное сопротивление характеризуется нелинейной вольтамперной характеристикой, нелинейная катушка задаётся вебер-амперной характеристикой, ёмкость характеризуется кулон-вольтной характеристикой. Все перечисленные зависимости весьма разнообразны, но их можно систематизировать по двум основным группам: симметричные и несимметричные. Нелинейный элемент будет иметь симметричную характеристику, если форма кривой не зависит от направления тока или направления приложенного напряжения, в противном случае характеристика становится несимметричной. На рис. 9.1-9.2 изображены симметричные вольтамперные характеристики (В.А.Х.) и, соответственно, на рис. 9.3-9.4 – несимметричные.
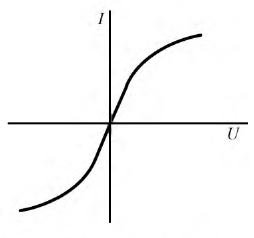
Рис. 9.1. В.А.Х. лампы накаливания
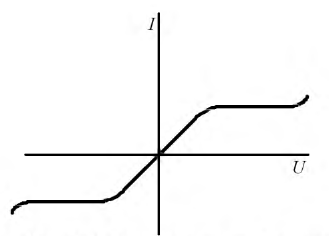
Рис. 9.2. В.А.Х. характеристика бареттера
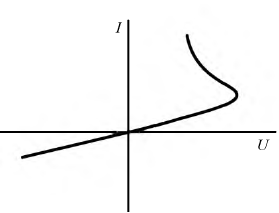
Рис. 9.3. В.А.Х. электрической дуги
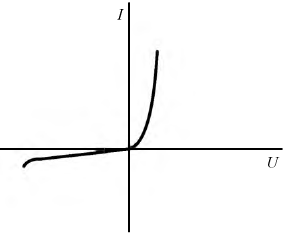
Рис. 9.4. В.А.Х. диода
Нелинейные элементы могут быть подразделены на управляемые и неуправляемые. Отличительной особенностью управляемых элементов является наличие семейства характеристик: транзисторы, тиристоры, магнитные усилители и т.д.
Статистические и дифференциальные характеристики нелинейных элементов
Режим работы нелинейного элемента (НЭ) во многом зависит от положения рабочей точки на характеристике (рис. 9.5). Пусть точка  характеризует рабочий режим работы нелинейного элемента. При неизменном напряжении на зажимах НЭ положение точки
характеризует рабочий режим работы нелинейного элемента. При неизменном напряжении на зажимах НЭ положение точки  также неизменно. В этом случае режим работы НЭ можно оценить с помощью статического сопротивления
также неизменно. В этом случае режим работы НЭ можно оценить с помощью статического сопротивления  которое определяется отношением напряжения на НЭ к току, протекающему через него:
которое определяется отношением напряжения на НЭ к току, протекающему через него:

Сопротивление  численно равно тангенсу угла
численно равно тангенсу угла  между осью ординат и секущей, идущей из начала координат и точку
между осью ординат и секущей, идущей из начала координат и точку  умноженному на отношение масштабов
умноженному на отношение масштабов 
Дифференциальное сопротивление  равно отношению бесконечно малого приращения напряжения к бесконечно малому приращению тока, т.е.:
равно отношению бесконечно малого приращения напряжения к бесконечно малому приращению тока, т.е.:

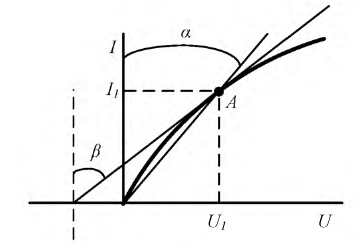
Рис. 9.5. В.А.Х. НЭ
Численно дифференциальное сопротивление равно тангенсу угла наклона касательной  проведенной к В.А.Х. в точке
проведенной к В.А.Х. в точке  и осью ординат, умноженному на отношение масштабов напряжения и тока
и осью ординат, умноженному на отношение масштабов напряжения и тока 
Замена нелинейного элемента линейным и источником ЭДС – один из вариантов линеаризации цепи.
Если заранее известен участок  характеристики, по которой будет перемещаться рабочая точка при изменении входного напряжения, и при этом участок рабочей части характеристики достаточно линеен, то его можно заменить линейным элементом и источником ЭДС. На рис. 9.6 показано определение параметров линеаризованного НЭ. Через точки проведена прямая, причём сопротивление элемента
характеристики, по которой будет перемещаться рабочая точка при изменении входного напряжения, и при этом участок рабочей части характеристики достаточно линеен, то его можно заменить линейным элементом и источником ЭДС. На рис. 9.6 показано определение параметров линеаризованного НЭ. Через точки проведена прямая, причём сопротивление элемента  пропорционально
пропорционально  т.е.:
т.е.:

где  – масштаб сопротивления, а участок слева от начала координат отсекает по оси абсцисс величину
– масштаб сопротивления, а участок слева от начала координат отсекает по оси абсцисс величину 
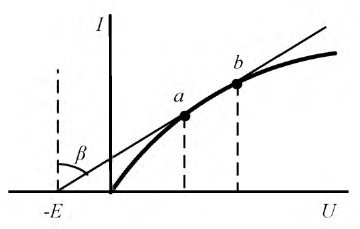
Рис. 9.6. Линеаризация НЭ
Следовательно, уравнение электрического равновесия на основании рис. 9.6 примет вид:
Таким образом, исходный нелинейный элемент (рис. 9.7) заменяется на линейный, схема замещения которого изображена рис. 9.8.
Рис. 9.7. Исходный НЭ
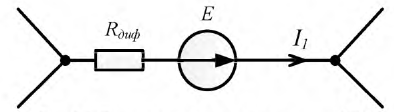
Рис. 9.8. Эквивалентная схема замещения НЭ
При ином наклоне характеристики НЭ (рис. 9.9) получим:
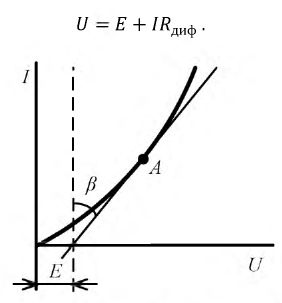
Рис. 9.9. Вольт-амперная характеристика НЭ
Расчет электрической цепи при смешанном соединении нелинейных элементов
Рассмотрим общий принцип расчета нелинейных цепей с использованием графоаналитического метода.
Пусть дана цепь, содержащая три нелинейных элемента, каждый из которых задан своей вольтамперной характеристикой (рис. 9.10-9.11).
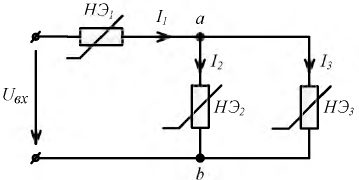
Рис. 9.10. Исследуемая цепь с НЭ
Применительно к цепи по рис. 9.10 запишем уравнения по законам Кирхгофа:
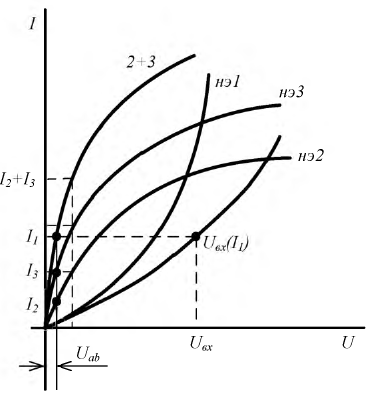
Рис. 9.11. В.А.Х. элементов исходной цепи
Расчет будем вести в следующей последовательности.
Произвольно задаваясь значениями напряжения  на параллельном участке цепи, просуммируем ординаты графиков 2 и 3 и построим вспомогательную зависимость
на параллельном участке цепи, просуммируем ординаты графиков 2 и 3 и построим вспомогательную зависимость  заменяющую нелинейные элементы НЭ2 и НЭЗ. Теперь схема состоит из двух последовательно соединенных сопротивлений
заменяющую нелинейные элементы НЭ2 и НЭЗ. Теперь схема состоит из двух последовательно соединенных сопротивлений  и
и  Задаваясь значением тока
Задаваясь значением тока  суммируем абсциссы графиков 1 и (2 + 3) и получим В.А.Х. для данной схемы соединения нелинейных элементов
суммируем абсциссы графиков 1 и (2 + 3) и получим В.А.Х. для данной схемы соединения нелинейных элементов  По заданному напряжению
По заданному напряжению  определяем ток
определяем ток 
Из точки ординаты, соответствующей току  опустим перпендикуляр до пересечения с кривой 2+3, тем самым найдем напряжение
опустим перпендикуляр до пересечения с кривой 2+3, тем самым найдем напряжение  Точки пересечения с кривыми НЭ2 и НЭЗ дают значения токов
Точки пересечения с кривыми НЭ2 и НЭЗ дают значения токов  и
и 
Метод двух узлов
Для нелинейной цепи, имеющей два узла, расчет можно вести методом двух узлов. Покажем его применимость на примере цепи следующего вида (рис. 9.12).
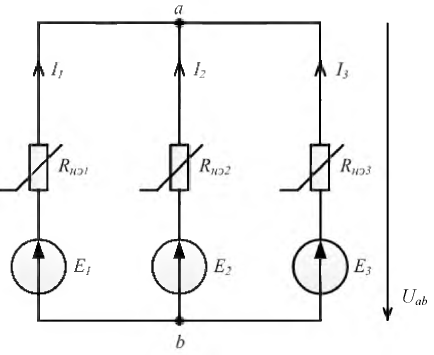
Рис. 9.12. Нелинейная электрическая цепь
Каждый из элементов  и
и  задан своей В.А.Х. (рис. 9.13).
задан своей В.А.Х. (рис. 9.13).
Напряжение на каждом из элементов может быть определено следующим образом:

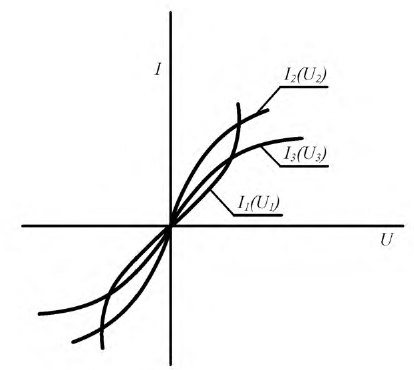
Рис. 9.13. В.А.Х. нелинейных элементов
Поскольку напряжение  входящее в каждое из уравнений – общее, то для определения токов выполним следующие преобразования.
входящее в каждое из уравнений – общее, то для определения токов выполним следующие преобразования.
Трансформируем данные функции относительно общего напряжения  т.е. построим зависимости
т.е. построим зависимости  При этом В.А.Х. каждого из элементов должны быть сдвинуты с учетом знака ЭДС в формулах (9.3) вправо или влево на величину ЭДС. Через соответствующие значения ЭДС, на которые сдвинуты графики, проводятся перпендикуляры, относительно которых В.А.Х. зеркально отражаются. Объясним такое построение на примере первой В.А.Х.: при
При этом В.А.Х. каждого из элементов должны быть сдвинуты с учетом знака ЭДС в формулах (9.3) вправо или влево на величину ЭДС. Через соответствующие значения ЭДС, на которые сдвинуты графики, проводятся перпендикуляры, относительно которых В.А.Х. зеркально отражаются. Объясним такое построение на примере первой В.А.Х.: при  и
и  По мере роста тока
По мере роста тока  в соответствии с В.А.Х. растет
в соответствии с В.А.Х. растет  и уменьшается
и уменьшается  (см. формулу 9.3), при отрицательных значениях тока по модулю увеличивается. Аналогичные рассуждения можно провести и для других В.А.Х. На основании первого закона Кирхгофа:
(см. формулу 9.3), при отрицательных значениях тока по модулю увеличивается. Аналогичные рассуждения можно провести и для других В.А.Х. На основании первого закона Кирхгофа:
Задаваясь рядом значений  просуммируем ординаты перестроенных кривых и получим зависимость
просуммируем ординаты перестроенных кривых и получим зависимость  При каком-то значении напряжения
При каком-то значении напряжения  суммарный ток равен нулю, следовательно, при этом напряжении выполняется первый закон Кирхгофа, оно и является искомым решением задачи. Восстановив в этой точке перпендикуляр к оси абсцисс, найдем токи ветвей.
суммарный ток равен нулю, следовательно, при этом напряжении выполняется первый закон Кирхгофа, оно и является искомым решением задачи. Восстановив в этой точке перпендикуляр к оси абсцисс, найдем токи ветвей.
Первый и третий токи положительны, а второй ток отрицателен, т.е. его направление на схеме нужно изменить на противоположное.
Стабилизация напряжения и тока с помощью нелинейных элементов
В линейных цепях это явление не может быть реализовано.
В основе стабилизации лежит наличие у В.А.Х. элемента участков практически параллельных осям напряжений или токов.
Основная задача стабилизации состоит в том, что при существенных изменениях входных напряжений выходные напряжения или токи меняются незначительно. Вводится коэффициент стабилизации, например, по напряжению:
Качество стабилизации зависит не только от наличия элемента с требуемой характеристикой, но и поддержания требуемого режима работы этого элемента, т.е. стабильности рабочей точки. Изобразим простейшие схемы стабилизации (рис. 9.14,a,b).
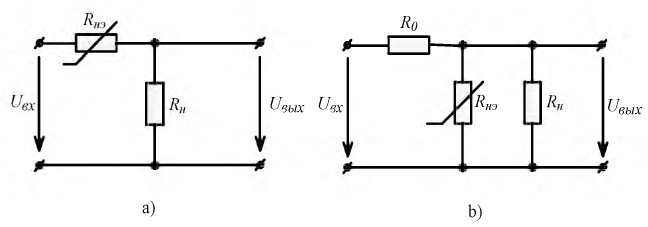
Рис. 9.14. Схемы стабилизации напряжения: а) последовательная, b) параллельная
Рассмотрим процесс стабилизации на примере последовательной цепи (рис. 9.14,а).
При значительном изменении напряжения на входе  изменение напряжения на нагрузке
изменение напряжения на нагрузке  незначительно, что очевидно из построений на рис 9.15.
незначительно, что очевидно из построений на рис 9.15.
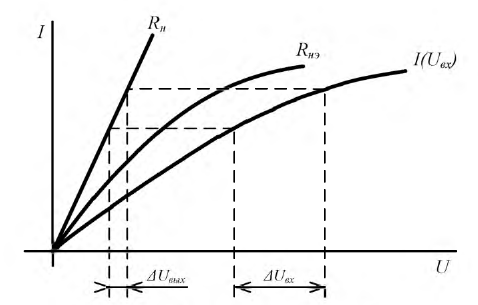
Рис. 9.15. Стабилизация напряжения
Метод эквивалентного генератора
Если в схеме есть один нелинейный элемент, а остальные – линейные и необходимо рассчитать ток через нелинейный элемент, то выделяют ветвь с нелинейным элементом, а оставшуюся линейную схему представляют в виде активного двухполюсника (рис. 9.16).
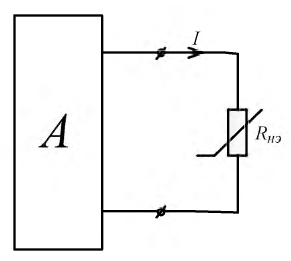
Рис. 9.16. Активный двухполюсник, нагруженный нелинейным сопротивлением
Активный линейный двухполюсник замещается источником ЭДС и некоторым внутренним линейным сопротивлением  Тогда расчетная схема применит вид (рис. 9.17).
Тогда расчетная схема применит вид (рис. 9.17).
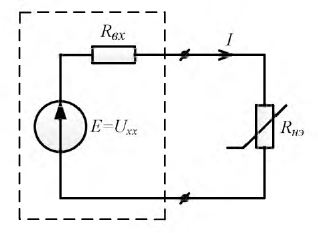
После проведенных преобразований, рассмотренных выше, определение тока в ветви с нелинейным элементом не представляет трудностей.
Нелинейные магнитные цепи при постоянных токах
Самостоятельную группу нелинейных цепей образуют магнитные цепи. Магнитной цепью называется совокупность устройств, содержащих ферромагнитные тела, процессы в которых описываются понятиями магнитодвижущей или намагничивающей силы (МДС), магнитного потока и падения магнитного напряжения или разности магнитных потенциалов. Из курса физики известен закон полного тока, который формулируется так: циркуляция вектора напряженности вдоль замкнутого контура равна алгебраической сумме токов, охваченных этим контуром, т. е.:

Этот закон связывает магнитное поле с напряженностью  и электрическое поле, характеризуемое величиной тока
и электрическое поле, характеризуемое величиной тока 
Магнитная индукция  – это векторная величина, характеризующая силовое воздействие магнитного поля на ток:
– это векторная величина, характеризующая силовое воздействие магнитного поля на ток:

где  – намагниченность, характеризующая магнитный момент единицы объема вещества;
– намагниченность, характеризующая магнитный момент единицы объема вещества;  относительная магнитная проницаемость;
относительная магнитная проницаемость;  – магнитная постоянная вакуума;
– магнитная постоянная вакуума;  – абсолютная магнитная проницаемость вещества.
– абсолютная магнитная проницаемость вещества.
В системе СИ единица индукции В – тесла  единица намагниченности
единица намагниченности  и напряженности
и напряженности  – ампер на метр
– ампер на метр 
Магнитный поток  через некоторую поверхность
через некоторую поверхность  – это поток вектора магнитной индукции через эту поверхность:
– это поток вектора магнитной индукции через эту поверхность:
Для ферромагнитных материалов связь между  и
и  является нелинейной и характеризуется явлением гистерезиса, т. е. отставанием изменения магнитной индукции
является нелинейной и характеризуется явлением гистерезиса, т. е. отставанием изменения магнитной индукции  от изменения напряженности магнитного поля
от изменения напряженности магнитного поля  При этом магнитная проницаемость ферромагнитной среды может многократно превышать магнитную проницаемость вакуума. При расчетах реальных магнитных цепей всегда можно выделить участки, где его магнитные свойства, а также линейные размеры остаются неизменными. Это позволяет в законе полного тока (9.4) перейти от интеграла к сумме, что упрощает расчет цепей. Кроме того, если катушка, намотанная на магнитопровод, содержит
При этом магнитная проницаемость ферромагнитной среды может многократно превышать магнитную проницаемость вакуума. При расчетах реальных магнитных цепей всегда можно выделить участки, где его магнитные свойства, а также линейные размеры остаются неизменными. Это позволяет в законе полного тока (9.4) перейти от интеграла к сумме, что упрощает расчет цепей. Кроме того, если катушка, намотанная на магнитопровод, содержит  витков, то вводится понятие МДС – магнитодвижущая или намагничивающая сила
витков, то вводится понятие МДС – магнитодвижущая или намагничивающая сила  Для участка магнитопровода, представленного на рис. 9.18, закон полного тока может быть записан в форме:
Для участка магнитопровода, представленного на рис. 9.18, закон полного тока может быть записан в форме:

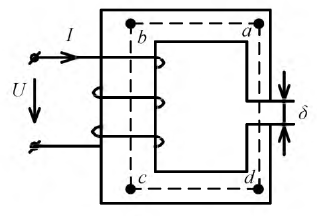
Рис. 9.18. Неразветвленный магнитопровод переменного сечения с зазором 
Поскольку магнитопровод неразветвлен и его сечение на разных участках неодинаково, то и магнитная индукция также не одинакова, а магнитный поток  в любом сечении один и тот же. Это позволяет принять:
в любом сечении один и тот же. Это позволяет принять:

Используя данное соотношение, подставим его в (9.6) и получим следующее выражение:
откуда:

Выражение (9.7) есть закон Ома для магнитных цепей.
Магнитное сопротивление участка цепи длиной  и сечением
и сечением  будет:
будет:
Разветвленные магнитные цепи, как и электрические цепи, можно описать законами Кирхгофа.
Первый закон Кирхгофа: алгебраическая сумма магнитных потоков в узле магнитной цепи равна нулю:
Второй закон Кирхгофа: алгебраическая сумма падений магнитных напряжений в контуре равна алгебраической сумме МДС, действующих в этом контуре:
где  падение магнитного напряжения;
падение магнитного напряжения;  — МДС.
— МДС.
Постоянный магнит
Постоянный магнит нашел широкое практическое применение (генераторы тока, магнето, преобразующие элементы приборов магнитоэлектрической системы, динамики, громкоговорители и т.д.). Рассмотрим принцип расчета постоянного магнита. Если на замкнутый магнитопровод, выполненный из магнитотвердого материала (широкая петля гистерезиса) намотать обмотку и пропустить через неё ток, то магнитопровод можно довести до насыщения. Затем ток уменьшить до нуля, при этом напряженность также снижается до нуля, а индукция не обращается в нуль (кривая размагничивания стали, рис. 9.19). После этого катушку снимают и остается рассчитать магнитную индукцию  и напряженность магнитного поля в теле магнитопровода
и напряженность магнитного поля в теле магнитопровода 
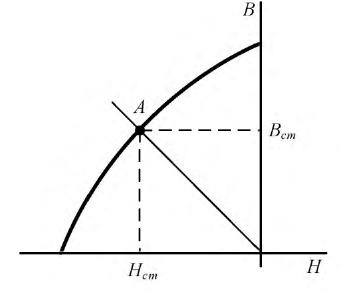
Рис. 9.19. Кривая размагничивания стали
Для получения реального магнита в магнитопроводе делают тонкий пропил, при этом будем считать, что площадь сечения магнитопровода с пропилом и площадь без пропила стали одинаковы. Будем полагать известными кривую размагничивания магнитопровода, длину воздушного зазора  и длину ферромагнитной части магнита
и длину ферромагнитной части магнита  В соответствии с законом полного тока запишем:
В соответствии с законом полного тока запишем:

Нуль в правой части уравнения объясняется отсутствием катушки на магнитопроводе.
Если зазор достаточно мал, то потоком рассеяния в зазоре можно пренебречь:

где  — площадь поперечного сечения магнита,
— площадь поперечного сечения магнита,  — площадь поперечного сечения воздушного зазора.
— площадь поперечного сечения воздушного зазора.
Так как магнитопровод не разветвленный, то магнитный поток в пропиле и стали, будет одинаков:

После этого магнитопровод перестает быть однородным и из уравнения (9.8) получим:
Тогда:

Таким образом, между  и
и  имеется линейная зависимость. Это позволяет провести из начала координат прямую по уравнению (9.9) до пересечения с кривой размагничивания. Точка пересечения этих функций
имеется линейная зависимость. Это позволяет провести из начала координат прямую по уравнению (9.9) до пересечения с кривой размагничивания. Точка пересечения этих функций  дает искомые результаты.
дает искомые результаты.
Особенности работы нелинейных элементов в цепях переменного тока
Работа нелинейных элементов в цепях переменного тока приводит к возникновению явлений, принципиально невозможных в линейных цепях, причем на этих особенностях базируются принципы действия новых приборов. С помощью нелинейных элементов осуществляется выпрямление переменного тока, умножение и деление частоты, стабилизация напряжения, усиление сигнала и т.д. Работа нелинейных элементов и электрических цепей, в которые входят эти элементы, описывается нелинейными дифференциальными уравнениями, точных методов решения которых в математике не существует. Поэтому для проведения инженерных расчетов применяют различные приближенные методы расчёта этих дифференциальных уравнений и в соответствии с этим существуют разные методы расчета нелинейных цепей на переменном токе. Назовем некоторые из них.
- Метод малого параметра и условной линеаризации. Основан на пренебрежении относительно малыми величинами. При этом полученная условно линейная цепь рассчитывается известными методами расчета линейных цепей, но с учетом нелинейной зависимости между действующими значениями токов и напряжений.
- Метод аналитической аппроксимации нелинейной характеристики. Основан на замене нелинейной зависимости неким аналитическим выражением так, чтобы оно достаточно точно описывало нелинейную зависимость и полученное дифференциальное уравнение решалось относительно просто.
- Метод кусочно-линейной аппроксимации и припасовывания линейного решения. Основан на замене нелинейной характеристики ломаной кривой и применении на каждом участке ломаной кривой методов линейной электротехники, а переход от одного участка ломаной кривой к другому участку осуществляется соответствующим выбором постоянных интегрирования.
- Итерационный метод. Основан на подстановке некоторого приближенного решения в исходное уравнение и последующем уточнении этого решения.
Нелинейные магнитные цепи при периодических процессах
Нелинейные магнитные цепи при периодических процессах также нашли широкое практическое применение, это различного рода электромагнитные аппараты и устройства, основным элементом которых является катушка с ферромагнитным сердечником (рис. 9.20). Исследование ее режимов работы позволит сделать количественную и качественную оценку происходящих в ней явлений.
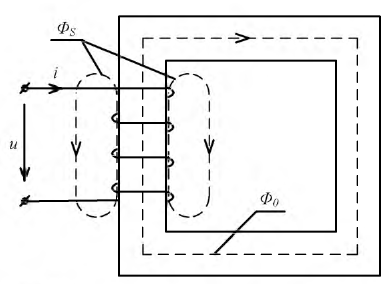
Рис. 9.20. Катушка с ферромагнитным сердечником
В катушке с ферромагнитным сердечником необходимо выделить два магнитных потока: основной  замыкающийся в сердечнике, и поток рассеяния
замыкающийся в сердечнике, и поток рассеяния  замыкающийся вокруг витков катушки в воздухе, оба магнитных потока создают соответствующие ЭДС самоиндукции:
замыкающийся вокруг витков катушки в воздухе, оба магнитных потока создают соответствующие ЭДС самоиндукции:

где  — потокосцепление основного магнитного потока.
— потокосцепление основного магнитного потока.
С учетом того, что сама обмотка, выполненная из медного провода, имеет сопротивление  уравнение электрического равновесия катушки имеет вид:
уравнение электрического равновесия катушки имеет вид:

Уравнение (9.10) нелинейно, т.к.  и, соответственно,
и, соответственно,  нелинейно зависят от напряженности магнитного поля
нелинейно зависят от напряженности магнитного поля  и, соответственно, тока
и, соответственно, тока  С учетом того, что
С учетом того, что  и падение напряжения на активном сопротивлении катушки
и падение напряжения на активном сопротивлении катушки  мало, воспользуемся для расчета методом малого параметра и условной линеаризации. Пренебрегая этими составляющими, получим идеальную катушку.
мало, воспользуемся для расчета методом малого параметра и условной линеаризации. Пренебрегая этими составляющими, получим идеальную катушку.
Идеальная катушка индуктивности
Таким образом, уравнение равновесия идеальной катушки имеет вид:

Будем считать, что напряжение сети изменяется по косинусоидальному закону  Найдем закон изменения магнитного потока
Найдем закон изменения магнитного потока  Учитывая, что
Учитывая, что  основной магнитный поток определится по формуле:
основной магнитный поток определится по формуле:

Действующее значение напряжения, выраженное через магнитный поток:

Магнитный поток, так же, как и приложенное напряжение, изменяется по синусоидальному закону. ЭДС самоиндукции отстает от магнитного потока на угол 90°, в свою очередь напряжение и ЭДС находятся в противофазе, поэтому напряжение опережает магнитный поток на 90°.
Определим форму тока в катушке, считая, что магнитопровод изготовлен из магнитомягкого материала. Для решения этой задачи воспользуемся графоаналитическим методом (рис. 9.21).
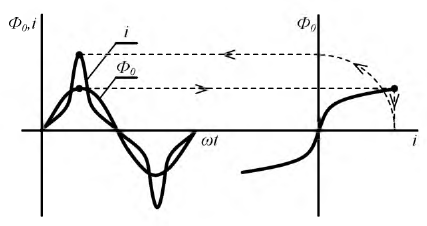
Рис. 9.21. Графическое определение закона изменения тока в катушке
Форма тока получилась несинусоидальная, что указывает на искажение тока в нелинейных цепях и, соответственно, усложняет расчет. Если учесть петлю гистерезиса реального магнитопровода, то форма кривой тока еще более усложнится (рис. 9.22).
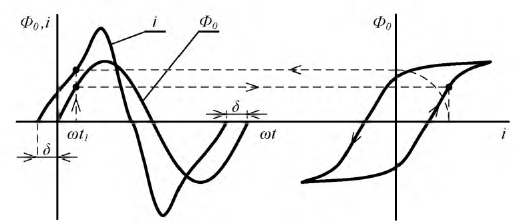
Рис. 9.22. Графическое определение закона изменения тока при учете петли гистерезиса
Появление угла  говорит о том, что ток в катушке не совпадает с магнитным потоком по фазе, а именно, опережает его. При расчете методом малого параметра несинусоидальный ток можно заменить эквивалентной синусоидой, который будем считать эквивалентом реального несинусоидального тока. Это верно при условии равенства тепловых потерь при действии реального несинусоидального тока и эквивалентного синусоидального. Введение эквивалентных синусоид позволяет использовать комплексный метод расчета и строить векторные диаграммы.
говорит о том, что ток в катушке не совпадает с магнитным потоком по фазе, а именно, опережает его. При расчете методом малого параметра несинусоидальный ток можно заменить эквивалентной синусоидой, который будем считать эквивалентом реального несинусоидального тока. Это верно при условии равенства тепловых потерь при действии реального несинусоидального тока и эквивалентного синусоидального. Введение эквивалентных синусоид позволяет использовать комплексный метод расчета и строить векторные диаграммы.
Уравнение электрического равновесия идеальной катушки запишется в виде:

Анализ поведения тока идеальной катушки позволяет построить векторную диаграмму (рис. 9.23).
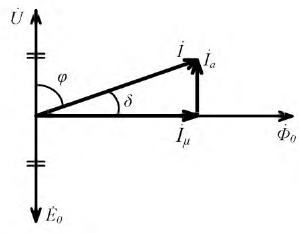
Рис. 9.23. Векторная диаграмма идеальной катушки
Из векторной диаграммы следует, что угол сдвига между током и напряжением катушки  не равен 90°, несмотря на пренебрежение тепловыми потерями на нагрев обмотки, т.е. активная мощность
не равен 90°, несмотря на пренебрежение тепловыми потерями на нагрев обмотки, т.е. активная мощность  следовательно, эта мощность соответствует потерям на нагрев сердечника. Эту мощность принято называть потерями в стали
следовательно, эта мощность соответствует потерям на нагрев сердечника. Эту мощность принято называть потерями в стали  Часть этой мощности затрачивается на перемагничивание стали (зависит от площади петли гистерезиса) и на нагрев, вызванный вихревыми токами (токи Фуко). Учет этого фактора является важным условием расчета любого электротехнического устройства, поскольку он задает тепловой режим и эффективность его работы.
Часть этой мощности затрачивается на перемагничивание стали (зависит от площади петли гистерезиса) и на нагрев, вызванный вихревыми токами (токи Фуко). Учет этого фактора является важным условием расчета любого электротехнического устройства, поскольку он задает тепловой режим и эффективность его работы.
Потери на гистерезис
Мощность этой составляющей потерь зависит от целого ряда факторов. Одной из эмпирических зависимостей, полученных для расчета потерь на перемагничивание, является формула Штейнмеца:

где  — коэффициент, зависящий от сорта материала (стали);
— коэффициент, зависящий от сорта материала (стали);  — частота переменного тока;
— частота переменного тока;  – масса магнитопровода;
– масса магнитопровода;  — амплитуда магнитной индукции.
— амплитуда магнитной индукции.
Степень  зависит от величины магнитной индукции:
зависит от величины магнитной индукции:
1)  при
при 
2)  при
при 
Потери на вихревые токи
Вихревые токи возникают ввиду того, что магнитопровод, изготовленный из стали, является проводящим, и под действием наведенной ЭДС линии тока расположены в контуре, перпендикулярно силовым линиям. Величина наведенной ЭДС зависит от частоты и магнитной индукции и мощность, расходуемая на тепловые потери, вызванные вихревыми токами, рассчитывается по формуле:

где  — коэффициент, определяемый электропроводящими свойствами материала.
— коэффициент, определяемый электропроводящими свойствами материала.
Для уменьшения этих потерь поступают следующим образом: магнитопровод набирают из листов стали, изолированных друг от друга с помощью лака или добавляют в ферромагнитный материал примеси, увеличивающие удельное сопротивление стали. Так как  сильно зависит от частоты, то с ее увеличением частоты толщина листа уменьшается:
сильно зависит от частоты, то с ее увеличением частоты толщина листа уменьшается:
1) при 
2) при 
На очень высоких частотах магнитопровод изготавливают из магнитодиэлектриков – ферритов, которые представляют собой смесь из мелких ферромагнитных частиц и диэлектрика.
Схема замещения идеальной катушки
На векторной диаграмме идеальной катушки (рис. 9.23) показано разложение вектора тока на активную  (совпадающую по фазе с напряжением) и реактивную (намагничивающую)
(совпадающую по фазе с напряжением) и реактивную (намагничивающую)  составляющие тока. На этом основании делаем вывод, что схему замещения катушки можно представить в виде параллельно соединенных индуктивного и активного сопротивлений или проводимостей, что удобнее при параллельном соединении (рис. 9.24).
составляющие тока. На этом основании делаем вывод, что схему замещения катушки можно представить в виде параллельно соединенных индуктивного и активного сопротивлений или проводимостей, что удобнее при параллельном соединении (рис. 9.24).
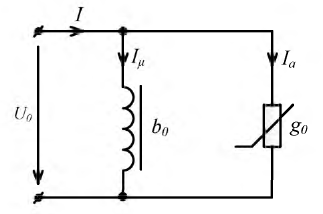
Рис. 9.24. Схема замещения идеальной катушки
Активная составляющая тока протекает по нелинейной активной проводимости  и ей соответствует мощность потерь в стали:
и ей соответствует мощность потерь в стали:

Реактивная составляющая тока протекает по нелинейной индуктивности и, соответственно, реактивная мощность:

Векторная диаграмма и схема замещения реальной катушки
Возвращаясь к уравнению (9.10) и учитывая, что несинусоидальный ток заменен эквивалентным синусоидальным, перепишем это уравнение в комплексной форме:

где  – сопротивление провода;
– сопротивление провода;  – индуктивность потока рассеивания (является линейной, т.к. силовые линии замыкаются по воздуху, минуя магнитопровод);
– индуктивность потока рассеивания (является линейной, т.к. силовые линии замыкаются по воздуху, минуя магнитопровод);  – индуктивное сопротивление потока рассеяния.
– индуктивное сопротивление потока рассеяния.
На основании уравнения (9.12) схема замещения реальной катушки примет вид (рис. 9.25):
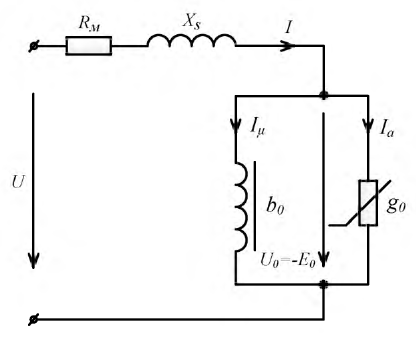
Рис. 9.25. Последовательно-параллельная схема замещения реальной катушки
Параметры схемы замещения могут быть получены на основании экспериментальных измерений напряжения, тока и мощности, потребляемой катушкой из цепи. По результатам этих измерений вначале строят более простую – последовательную схему замещения (рис. 9.26).
Параметры последовательной и последовательно-параллельной схем замещения связаны между собой следующими соотношениями:
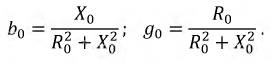
На основании схемы замещения можно построить и векторную диаграмму (рис. 9.27).
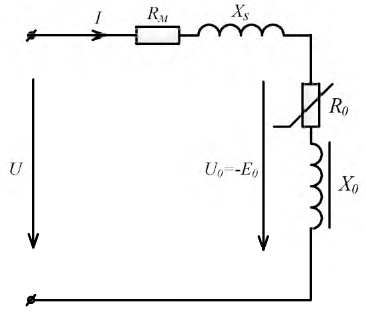
Рис. 9.26. Последовательная схема замещения реальной катушки
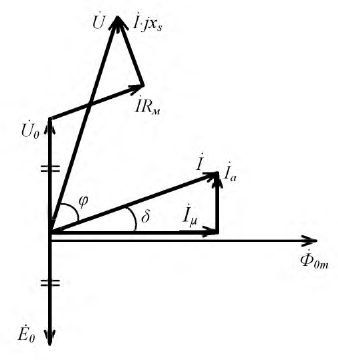
Рис. 9.27. Векторная диаграмма реальной катушки
Трансформатор с ферромагнитным сердечником
Основным элементом трансформатора является рассмотренная выше катушка с ферромагнитным сердечником и дополнительно намотанной на него второй катушкой. По сравнению с линейным трансформатором у трансформатора с ферромагнитным сердечником резко увеличивается магнитный поток, что в свою очередь приводит к увеличению мощности, передаваемой из одной обмотки в другую, но трансформатор с ферромагнитным сердечником становится нелинейным и в его магнитопроводе появляются потери. Как и при анализе работы катушки, используют понятия эквивалентных синусоид. Потому напряжения, токи и магнитный поток считают синусоидальными. Подавляющее большинство трансформаторов конструируется с максимальной близостью к линейным. Область использования трансформаторов весьма широка – это силовые, измерительные, согласующие, сварочные и т.д. Так как принцип работы воздушного трансформатора ранее был подробно рассмотрен, то ограничимся лишь составлением и анализом схемы замещения трансформатора с сердечником (рис. 9.28).
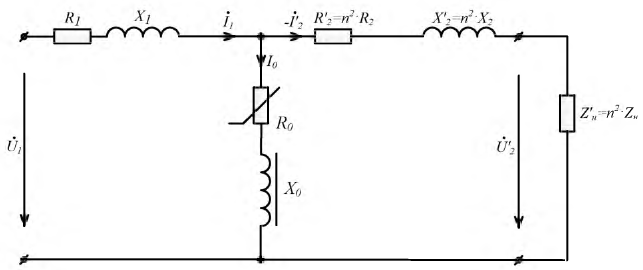
Рис. 9.28. Схема замещения трансформатора с ферромагнитным сердечником
Запишем уравнения трансформатора для мгновенных величин токов и напряжений. Первые два – это уравнения электрического равновесия для первичной и вторичной цепи, третье – уравнение намагничивающих сил:
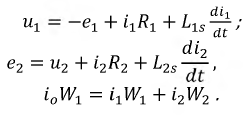
В комплексной форме эта система уравнений примет вид:
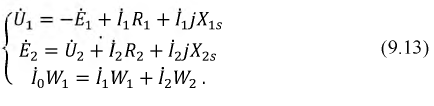
Некоторого пояснения требует уравнение магнитного равновесия.
В режиме холостого хода  магнитный поток создается только током первичной обмотки и уравнение магнитного равновесия упростится:
магнитный поток создается только током первичной обмотки и уравнение магнитного равновесия упростится:

где  — ток холостого хода трансформатора.
— ток холостого хода трансформатора.
При этом МДС первичной обмотки равна  При подключении нагрузки магнитный поток трансформатора создают обе катушки и их суммарная намагничивающая сила равна:
При подключении нагрузки магнитный поток трансформатора создают обе катушки и их суммарная намагничивающая сила равна:
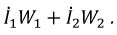
Поскольку подводимое к первичной обмотке напряжение не изменилось, то не изменился и магнитный поток трансформатора:

Следовательно, МДС в режиме холостого хода и в нагрузочном режиме равны:

Тогда:
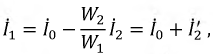
где:
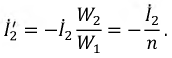
У приведенной схемы замещения трансформатора (рис. 9.28) все вторичные параметры изменились и поэтому уравнения (9.13), описывающие его работу, видоизменятся:
Для составления схемы замещения трансформатора необходимо определить ее параметры, т. е. сопротивления  С этой целью проводят опыты холостого хода и короткого замыкания.
С этой целью проводят опыты холостого хода и короткого замыкания.
Опыт холостого хода.
Проводится при номинальном первичном напряжении  и разомкнутых вторичных зажимах
и разомкнутых вторичных зажимах  При этом напряжение холостого хода на вторичных зажимах
При этом напряжение холостого хода на вторичных зажимах  принимают равным номинальному вторичному напряжению
принимают равным номинальному вторичному напряжению  Схема замещения примет вид (рис. 9.29):
Схема замещения примет вид (рис. 9.29):
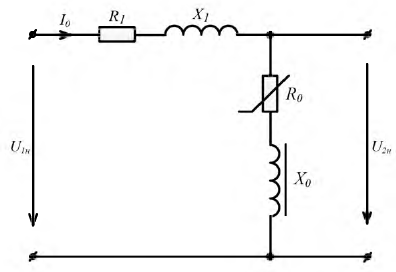
Рис. 9.29. Схема замещения трансформатора при опыте XX
Ток холостого хода  из-за резко возросшего сопротивления составляет порядка
из-за резко возросшего сопротивления составляет порядка  Таким образом, потери на нагрев первичной обмотки малы и ими можно пренебречь, а с учетом того, что
Таким образом, потери на нагрев первичной обмотки малы и ими можно пренебречь, а с учетом того, что  то потери холостого хода принимают равными потерям в стали
то потери холостого хода принимают равными потерям в стали  Таким образом, по показаниям трех приборов, включенных в цепь первичной обмотки (вольтметра, амперметра и ваттметра) рассчитывают параметры контура намагничивания
Таким образом, по показаниям трех приборов, включенных в цепь первичной обмотки (вольтметра, амперметра и ваттметра) рассчитывают параметры контура намагничивания 
Примечание: сопротивлением  можно пренебречь, т.к. основной магнитный поток трансформатора значительно больше потока рассеяния.
можно пренебречь, т.к. основной магнитный поток трансформатора значительно больше потока рассеяния.
Поскольку у трансформаторов малы активные сопротивления обмоток, а также потоки рассеяния, то можно принять  поэтому коэффициент трансформации определяют следующим образом:
поэтому коэффициент трансформации определяют следующим образом:

Опыт короткого замыкания.
Проводится при замкнутой накоротко вторичной обмотке трансформатора  и таком пониженном первичном напряжении
и таком пониженном первичном напряжении  чтобы ток первичной обмотки равнялся номинальному току
чтобы ток первичной обмотки равнялся номинальному току 
Так как  составляет
составляет  от
от  то пропорционально ему уменьшился магнитный поток в сердечнике, а пропорционально квадрату магнитного потока уменьшились потери в стали. Таким образом потери при коротком замыкании трансформатора принимают равными потерям в меди. По измеренным в режиме короткого замыкания величинам
то пропорционально ему уменьшился магнитный поток в сердечнике, а пропорционально квадрату магнитного потока уменьшились потери в стали. Таким образом потери при коротком замыкании трансформатора принимают равными потерям в меди. По измеренным в режиме короткого замыкания величинам  рассчитывают сопротивления обмоток
рассчитывают сопротивления обмоток 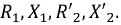
Примечание. При приведении вторичной обмотки к первичной сопротивления 
Для режима короткого замыкания схема замещения представлена на рис. 9.30. Пунктиром показано положение ветви намагничивания.
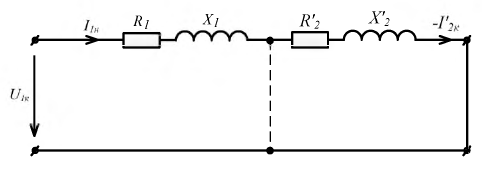
Рис. 9.30. Схема замещения трансформатора в режиме КЗ
В режиме КЗ намагничивающей составляющей  можно пренебречь и уравнение намагничивающих сил примет вид:
можно пренебречь и уравнение намагничивающих сил примет вид:
Тогда коэффициент трансформации можно определить следующим образом:
Векторная диаграмма трансформатора под нагрузкой
Используя систему уравнений (9.13), а также соотношения, полученные выше, построим векторную диаграмму, приняв для определенности, что трансформатор работает под нагрузкой при 
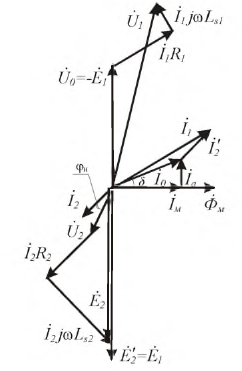
Рис. 9.31. Векторная диаграмма трансформатора, работающего под нагрузкой 
Построение диаграммы начнем с вектора  который располагается на комплексной плоскости произвольно. С учетом заданного характера нагрузки
который располагается на комплексной плоскости произвольно. С учетом заданного характера нагрузки  вектор напряжения
вектор напряжения  направлен с опережением относительно тока
направлен с опережением относительно тока  на угол
на угол  К его концу пристраивается вектор падения напряжения на активном сопротивлении вторичной обмотки
К его концу пристраивается вектор падения напряжения на активном сопротивлении вторичной обмотки  а перпендикулярно ему строится вектор падения напряжения на индуктивном сопротивлении
а перпендикулярно ему строится вектор падения напряжения на индуктивном сопротивлении  Геометрическая сумма этих трех векторов дает вектор
Геометрическая сумма этих трех векторов дает вектор  Вектор
Вектор  приводится к вектору
приводится к вектору  с учетом соотношения
с учетом соотношения  С другой стороны этот же вектор
С другой стороны этот же вектор  Далее строим вектор
Далее строим вектор  который является частью напряжения
который является частью напряжения  Магнитный поток опережает ЭДС индукции на угол 90°. Ток холостого хода
Магнитный поток опережает ЭДС индукции на угол 90°. Ток холостого хода  опережает магнитный поток на угол
опережает магнитный поток на угол  По заданному току
По заданному току  строим вектор
строим вектор  который определяется по формуле
который определяется по формуле  и суммируем его с вектором тока
и суммируем его с вектором тока  Геометрическая сумма этих токов дает ток первой катушки
Геометрическая сумма этих токов дает ток первой катушки  Определим напряжения в первом контуре. К концу вектора
Определим напряжения в первом контуре. К концу вектора  присоединяем вектор падения напряжения на активном сопротивлении первой катушки
присоединяем вектор падения напряжения на активном сопротивлении первой катушки  который располагается параллельно току
который располагается параллельно току  Перпендикулярно ему располагается вектор падения напряжения на индуктивном сопротивлении первой катушки
Перпендикулярно ему располагается вектор падения напряжения на индуктивном сопротивлении первой катушки  Сумма всех составляющих падений напряжений в первой катушке дает вектор
Сумма всех составляющих падений напряжений в первой катушке дает вектор  трансформатора.
трансформатора.
Феррорезонансные явления
В нелинейных цепях, составленных из нелинейных индуктивностей и линейных емкостей или наоборот, линейных индуктивностей и нелинейных емкостей возможны резонансные явления, как и в линейных цепях, но они характеризуются рядом особенностей. Феррорезонанс – это резонанс в цепи, содержащей катушку с ферромагнитным сердечником, который последовательно или параллельно подсоединен к линейному конденсатору. В линейных цепях резонанс возникал при изменении каких-либо параметров цепи: индуктивности  емкости
емкости  или частоты шине зависел от величины подводимого напряжения. В нелинейных цепях плавное изменение напряжения может привести к скачкообразному изменению фазы и амплитуды основной гармоники тока и наоборот, плавное изменение тока источника приводит к скачкообразному изменению фазы и амплитуды основной гармоники напряжения. Явление феррорезонанса сопровождается изменением знака угла сдвига фаз между основными гармониками тока и напряжения при плавном изменении напряжения или тока источника, вызванное нелинейностью катушки с ферромагниттным сердечником. Различают феррорезонанс напряжения и тока. Исследование данного явления будем производить в упрощенном варианте, считая, что токи, напряжения и магнитные потоки заменены эквивалентными синусоидами, а нелинейная индуктивность заменена условно нелинейной и зависящей от тока, а потери в стали катушки пренебрежимо малы, то есть активное сопротивление равно нулю.
или частоты шине зависел от величины подводимого напряжения. В нелинейных цепях плавное изменение напряжения может привести к скачкообразному изменению фазы и амплитуды основной гармоники тока и наоборот, плавное изменение тока источника приводит к скачкообразному изменению фазы и амплитуды основной гармоники напряжения. Явление феррорезонанса сопровождается изменением знака угла сдвига фаз между основными гармониками тока и напряжения при плавном изменении напряжения или тока источника, вызванное нелинейностью катушки с ферромагниттным сердечником. Различают феррорезонанс напряжения и тока. Исследование данного явления будем производить в упрощенном варианте, считая, что токи, напряжения и магнитные потоки заменены эквивалентными синусоидами, а нелинейная индуктивность заменена условно нелинейной и зависящей от тока, а потери в стали катушки пренебрежимо малы, то есть активное сопротивление равно нулю.
Феррорезонанс напряжений
Феррорезонанс напряжений возникает в последовательном колебательном контуре (рис. 9.32).
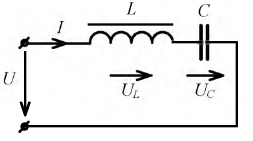
Рис. 9.32. Схема для исследования феррорезонанса напряжения
На рис. 9.33 построены В.А.Х. линейной емкости  нелинейной индуктивности
нелинейной индуктивности  и В.А.Х. всей цепи
и В.А.Х. всей цепи  С учетом соотношений:
С учетом соотношений:
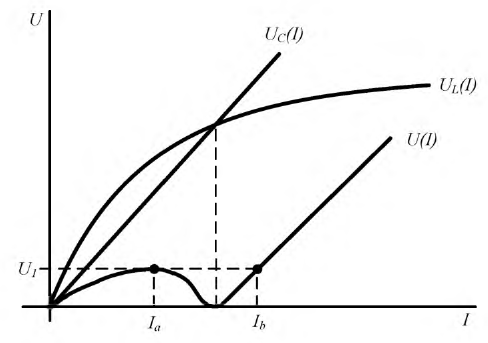
Рис. 9.33. Вольтамперные характеристики цепи при феррорезонансе напряжений
График зависимости  имеет явно выраженный минимум вблизи резонанса, что требует детального исследования этой функции.
имеет явно выраженный минимум вблизи резонанса, что требует детального исследования этой функции.
При работе схемы от источника напряжения и плавном росте напряжения до  происходит плавный рост тока, а при
происходит плавный рост тока, а при  — скачок тока от
— скачок тока от  до
до  (см. рис. 9.33), сопровождаемый одновременно изменением фазы на 180°. На самом деле в реальных цепях необходимо учитывать активное сопротивление катушки и появление высших гармоник из-за ее нелинейности. Поскольку резонанс возникает на основной (первой) гармонике, то от остальных не скомпенсированных гармоник тока вблизи резонанса дополнительно появляются падения напряжения и поэтому реальная В.А.Х. всей цепи выглядит иначе (рис. 9.34), т.е. при резонансе суммарное напряжение не снижается до нуля из-за перечисленных выше причин.
(см. рис. 9.33), сопровождаемый одновременно изменением фазы на 180°. На самом деле в реальных цепях необходимо учитывать активное сопротивление катушки и появление высших гармоник из-за ее нелинейности. Поскольку резонанс возникает на основной (первой) гармонике, то от остальных не скомпенсированных гармоник тока вблизи резонанса дополнительно появляются падения напряжения и поэтому реальная В.А.Х. всей цепи выглядит иначе (рис. 9.34), т.е. при резонансе суммарное напряжение не снижается до нуля из-за перечисленных выше причин.
Модуль напряжения сети подсчитывается по приведенной ниже формуле:
Скачкообразное изменение тока при увеличении напряжения выше  (из точки 2 в точку 4) и снижении напряжения ниже
(из точки 2 в точку 4) и снижении напряжения ниже  (из точки 3 в точку 1) носит название релейного или триггерного эффекта. Участок характеристики между точками 2 и 3 называется неустойчивым, т.к. он характеризуется отрицательным дифференциальным сопротивлением. Получить в явном виде эту часть характеристики представляется невозможным, т.к. при питании цепи от источника напряжения в интервале напряжений от
(из точки 3 в точку 1) носит название релейного или триггерного эффекта. Участок характеристики между точками 2 и 3 называется неустойчивым, т.к. он характеризуется отрицательным дифференциальным сопротивлением. Получить в явном виде эту часть характеристики представляется невозможным, т.к. при питании цепи от источника напряжения в интервале напряжений от  до
до  любому значению напряжения соответствует не одно, а несколько значений тока. Для получения всей характеристики необходимо подключить схему к источнику тока. Тогда каждому значению тока источника соответствует одно значение напряжения на В.А.Х. Это объясняется тем, что внутреннее сопротивление источника тока намного больше сопротивления цепи при всех его изменениях.
любому значению напряжения соответствует не одно, а несколько значений тока. Для получения всей характеристики необходимо подключить схему к источнику тока. Тогда каждому значению тока источника соответствует одно значение напряжения на В.А.Х. Это объясняется тем, что внутреннее сопротивление источника тока намного больше сопротивления цепи при всех его изменениях.
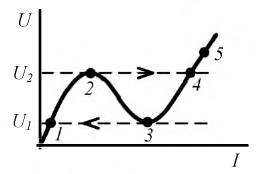
Рис. 9.34. Реальная вольт-амперная характеристика цепи при феррорезонансе напряжений
Феррорезонанс токов
Феррорезонанс токов наблюдается при параллельном соединении нелинейной индуктивности и линейного конденсатора (рис. 9.35).
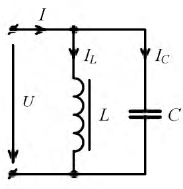
Рис. 9.35. Схема для исследования феррорезонанса токов
Будем полагать, что известны В.А.Х. идеальной нелинейной индуктивности и идеальной емкости, построенные для действующих значений. На рис. 9.36 построены В.А.Х. рассматриваемых элементов и суммарная В.А.Х., полученная на основании уравнения:
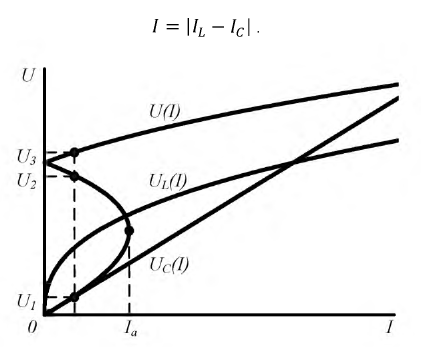
Рис. 9.36. Вольтамперные характеристики цепи при феррорезонансе токов
Из построений следует, что одному и тому же значению тока в диапазоне  соответствуют три значения напряжения
соответствуют три значения напряжения  Это объясняется наличием участка, характеризуемого отрицательным дифференциальным сопротивлением. При некоторой резонансной величине напряжения сети ток в неразветвленной части цепи равен нулю.
Это объясняется наличием участка, характеризуемого отрицательным дифференциальным сопротивлением. При некоторой резонансной величине напряжения сети ток в неразветвленной части цепи равен нулю.
В реальной цепи при учете потерь и высших гармоник общая В.А.Х. цепи имеет вид, показанный на рис. 9.37.
При плавном изменении напряжения источника можно получить всю кривую  Если же схема работает от источника тока, то при плавном изменении тока происходит скачкообразное изменение напряжения, т.е., наблюдается, как и при феррорезонансе напряжений, триггерный эффект.
Если же схема работает от источника тока, то при плавном изменении тока происходит скачкообразное изменение напряжения, т.е., наблюдается, как и при феррорезонансе напряжений, триггерный эффект.
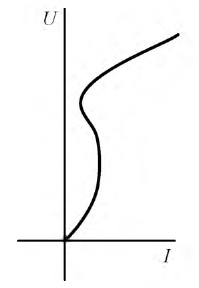
Рис. 9.37. Реальная вольт-амперная характеристика цепи при феррорезонансе токов
На практике он используется при создании так называемых ферромагнитных стабилизаторов напряжения. Ниже (рис. 9.38,a,b) приведены примеры простейших схем стабилизации.
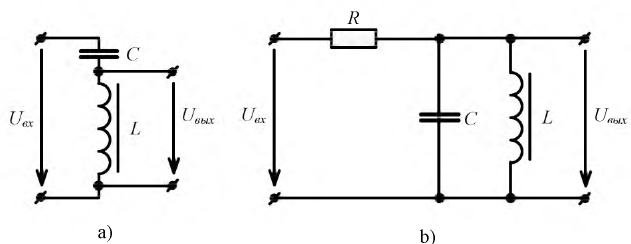
Рис. 9.38 а,b. Схемы ферромагнитных стабилизаторов напряжения
Ферромагнитный усилитель
Нелинейность свойств магнитопроводов лежит в основе работы многих устройств, среди которых особое место отводится управляемым нелинейным элементам. Примером таких устройств являются магнитные усилители, способные усиливать ток и мощность при сохранении формы выходного напряжения. Результирующий магнитный поток магнитного усилителя является суммой магнитных потоков, создаваемых МДС на различных частотах, источниками которых в магнитном усилителе служат рабочая обмотка и обмотка управления. Общий принцип работы простейшего магнитного усилителя рассмотрим на примере схемы рис. 9.39.
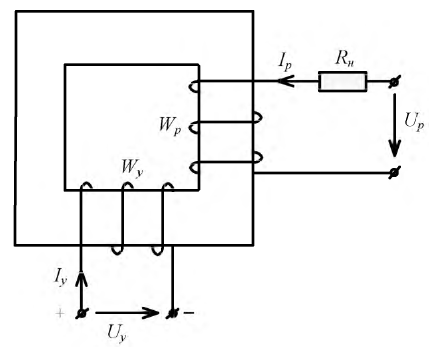
Рис. 9.39. Схема простейшего магнитного усилителя
На ферромагнитный сердечник наматывают две обмотки:  – рабочая обмотка.
– рабочая обмотка.  – обмотка управления. Отличительной особенностью магнитного усилителя является то, что по обмотке управления протекает постоянный ток, который дополнительно создаёт в магнитопроводе постоянный магнитный поток. Последовательно с рабочей обмоткой подключено сопротивление нагрузки
– обмотка управления. Отличительной особенностью магнитного усилителя является то, что по обмотке управления протекает постоянный ток, который дополнительно создаёт в магнитопроводе постоянный магнитный поток. Последовательно с рабочей обмоткой подключено сопротивление нагрузки  Рабочая обмотка питается от источника синусоидального тока. Магнитный усилитель сконструирован так, что в отсутствии тока управления магнитопровод не насыщен и его магнитная проницаемость велика.
Рабочая обмотка питается от источника синусоидального тока. Магнитный усилитель сконструирован так, что в отсутствии тока управления магнитопровод не насыщен и его магнитная проницаемость велика.
Рассмотрим принцип работы магнитного усилителя. Для этого сделаем ряд графических построений (рис. 9.40) и при этом будем считать, что вебер-амперная характеристика магнитопровода известна. Используем магнитопровод из магнитомягкого материала (узкая петля гистерезиса).
При отсутствии тока в обмотке управления  и синусоидальном напряжении магнитный поток и пропорциональная ему МДС рабочей обмотки также изменяются по синусоидальному закону. Это объясняется работой магнитного усилителя на линейной части вебер-амперной характеристики. При подаче на обмотку управления некоторого постоянного напряжения дополнительно появляется постоянный магнитный поток
и синусоидальном напряжении магнитный поток и пропорциональная ему МДС рабочей обмотки также изменяются по синусоидальному закону. Это объясняется работой магнитного усилителя на линейной части вебер-амперной характеристики. При подаче на обмотку управления некоторого постоянного напряжения дополнительно появляется постоянный магнитный поток  который суммируется с синусоидальным магнитным потоком рабочей обмотки
который суммируется с синусоидальным магнитным потоком рабочей обмотки  Это приводит к росту магнитодвижущей силы
Это приводит к росту магнитодвижущей силы  и, как следствие, к смещению рабочей области веберамперной характеристики в зону насыщения. Результирующая кривая магнитного потока искажается, то есть амплитуды положительной и отрицательной полуволны имеют разные численные значения, значит и наводимые ими ЭДС самоиндукции существенно отличаются по амплитуде.
и, как следствие, к смещению рабочей области веберамперной характеристики в зону насыщения. Результирующая кривая магнитного потока искажается, то есть амплитуды положительной и отрицательной полуволны имеют разные численные значения, значит и наводимые ими ЭДС самоиндукции существенно отличаются по амплитуде.
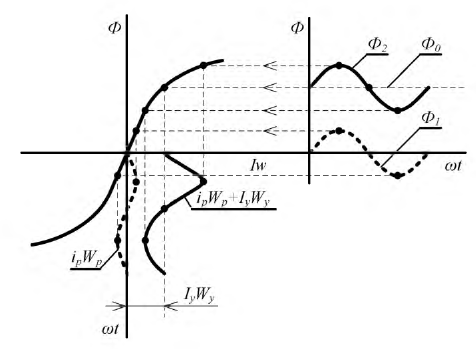
Рис. 9.40. Схема усиления сигнала
Напишем уравнение электрического равновесия для рабочей обмотки магнитного усилителя:
Из данного уравнения следует, что уменьшение ЭДС самоиндукции в рабочей обмотке приведет к увеличению тока, протекающего через сопротивление нагрузки  при неизменности амплитуды рабочего напряжения
при неизменности амплитуды рабочего напряжения  Таким образом, изменяя ток в обмотке управления, можно значительно изменять ток в нагрузке. Однако на практике такая схема не используется ввиду целого ряда присущих ей недостатков. Главный недостаток – влияние рабочей обмотки на обмотку управления. Этот недостаток может быть преодолён путём использования двух магнитопроводов (рис. 9.41).
Таким образом, изменяя ток в обмотке управления, можно значительно изменять ток в нагрузке. Однако на практике такая схема не используется ввиду целого ряда присущих ей недостатков. Главный недостаток – влияние рабочей обмотки на обмотку управления. Этот недостаток может быть преодолён путём использования двух магнитопроводов (рис. 9.41).
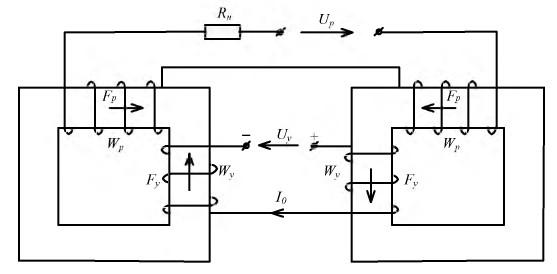
Рис. 9.41. Схема магнитного усилителя мощности
Эффективность работы магнитного усилителя определяется коэффициентами усиления по току и мощности:
Оптимальный режим работы магнитного усилителя можно рассчитать, если известно семейство его вольтамперных характеристик (рис. 9.42).
На основании второго закона Кирхгофа и учитывая, что  получим:
получим:
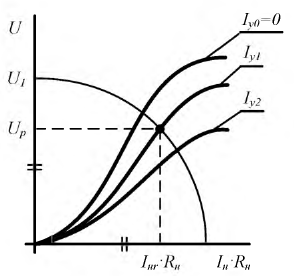
Рис. 9.42. Семейство В.А.Х. магнитного усилителя
Данное уравнение представляет собой уравнение окружности радиусом  Проведя дугу окружности в первой четверти, находим точки пересечения с семейством В.А.Х. По величине рабочего напряжения и известному току управления находим рабочую точку и определяем по заданному току управления соответствующие ток и напряжение на рабочей обмотке.
Проведя дугу окружности в первой четверти, находим точки пересечения с семейством В.А.Х. По величине рабочего напряжения и известному току управления находим рабочую точку и определяем по заданному току управления соответствующие ток и напряжение на рабочей обмотке.
Вентиль в цепи синусоидального тока
Полупроводниковые электронные приборы с практически односторонней проводимостью носят название вентиля (диода). Они относятся к классу активных нелинейных сопротивлений, которые так же задаются нелинейной В.А.Х. Кроме того, они относятся к классу безынерционных нелинейных элементов. На рис. 9.43 приведена В.А.Х. диода.
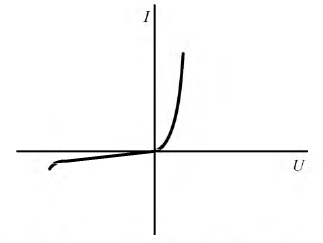
Рис. 9.43. Вольтамперная характеристика вентиля
Главное назначение вентиля – выпрямление переменного тока. Рассмотрим простейшую схему однополупериодного выпрямителя (рис. 9.44).
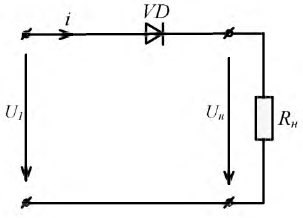
Рис. 9.44. Схема однополупериодного выпрямителя
Реализация принципа выпрямления тока в нагрузке иллюстрируется рис. 9.45.
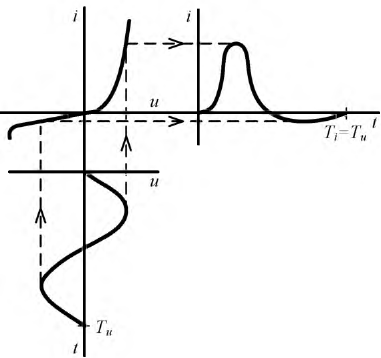
Рис. 9.45. Графическое определение временной зависимости тока  через вентиль
через вентиль
Из построения видно, что при отрицательной полуволне напряжения источника амплитуда тока резко уменьшается, а большей амплитуде входного напряжения соответствует больший выпрямительный эффект. Ток и, соответственно, падение напряжения на нагрузке имеют явно выраженную несинусоидальную форму и поэтому могут быть разложены в ряд, который содержит постоянную составляющую, первую и все четные гармоники. Если на нагрузке необходимо иметь постоянное напряжение, то перед нагрузкой включают фильтры, не пропускающие первую и все гармоники более высокого порядка. Аналогично работают выпрямители, построенные по более сложным схемам.
- Магнитные цепи и их расчёт
- Цепи переменного тока
- Символический метод расчета цепей
- Четырехполюсники
- Линейные и нелинейные резисторы
- Индуктивность и ее расчет
- Энергия в электрических цепях
- Линейные электрические цепи
A1
2.00
Найдите максимальную мощность $P_1$, выделяющуюся на нелинейном элементе.
Обозначим за $A$ точку на графике вольт-амперной характеристики нелинейного элемента, а за $O$ — центр окружности. Пусть $OA$ составляет угол $varphi$ с осью напряжений $frac{U}{U_0}=x$. Тогда
$$P_{НЭ}=IU={U_0}{I_0}sinvarphi cosvarphi=frac{{U_0}{I_0}sin 2varphi}{2}
$$
В начальный момент угол $varphi$ принимает значение $pi/3$, поэтому в процессе дальнейшей зарядки конденсатора величина $2varphi$ принимает значения $frac{2pi}{3}leqvarphileq2pi$.
Таким образом, максимальная мощность, выделяющаяся на нелинейном элементе достигается в момент замыкания ключа и равна
Ответ:
$$P_1=frac{{U_0}{I_0}sqrt{3}}{4}$$
A2
8.00
Найдите максимальную скорость изменения энергии конденсатора $P_2$ и время после замыкания ключа $Delta t$, через которое она достигается.
Скорость изменения энергии конденсатора
$$frac{dW}{dt}={I_C}{U_C}={U_0}{I_0}sinvarphi(1-cosvarphi)$$
Величина $sinvarphi(1-cosvarphi)$ является площадью равнобедренного треугольника с основанием $2sinvarphi$ и высотой $(1-cosvarphi)$, вписанного в окружность единичного радиуса. Максимум площади достигается в случае равностороннего треугольника. Таким образом, в этот момент времени $varphi$ принимает значение $2pi/3$, а максимальная площадь равняется $S_{max}=3sqrt{3}/4$
Окончательно
$$P_2=frac{3sqrt{3} {U_0}{I_0}}{4}$$
Найдём время, через которое $varphi$ принимает значение $2pi/3$. Рассмотрим изменение напряжения на конденсаторе с течением времени. Поскольку суммарное напряжение на нелинейном элементе и конденсаторе сохраняется
$$frac{dU_C}{dt}=-{U_0}frac{dx}{dt}$$
Величину $frac{dx}{dt}$ найдём из условия движения точки $A$ по окружности с некоторой угловой скоростью $omega$
$$frac{dx}{dt}=-{omega}sinvarphi Rightarrow frac{dU_C}{dt}={omega},{U_0}sinvarphi$$
С другой стороны
$$q_C=CU_C$$
Откуда
$$I_C=Cfrac{dU_C}{dt}={I_0}sinvarphi$$
Комбинируя два выражения для $frac{dU_C}{dt}$
$$omega=frac{I_0}{CU_0}=mathrm{const}$$
Таким образом, $OA$ вращается с постоянной угловой скоростью и к моменту достижения максимальной скорости изменения конденсатора поворачивается на угол $pi/3$, откуда сразу получим выражение для времени
$${Delta}t=frac{{pi}CU_0}{3I_0}$$
Ответ:
$$P_2=frac{3sqrt{3} {U_0}{I_0}}{4}$$
$${Delta}t=frac{{pi}CU_0}{3I_0}$$
