Устройство автомобилей
Основы динамики торможения автомобиля
Тормозной момент
Для интенсивного поглощения кинетической энергии движущегося автомобиля используют тормозные механизмы, которые создают на колесах искусственное сопротивление движению. При этом на ступицы колес автомобиля действуют тормозные моменты Мтор , а между колесом и дорогой возникают касательные реакции дороги (тормозные силы Ртор ), направленные навстречу движения.
Величина тормозного момента Мтор , создаваемого тормозным механизмом, зависит от его конструкции, а также усилия (в механическом) или давления (гидравлическом или пневматическом) в тормозном приводе. Усилие и давление в приводе пропорциональны возникающему тормозному моменту и тормозным силам.
Тормозной момент может быть определен по формуле:
где υт – коэффициент пропорциональности, изменяющийся в широких пределах и зависящий от многих факторов – температуры, наличия воды и т. д.);
Р – давление в тормозном приводе.
Тормозная сила
Сумма тормозных сил на заторможенных колесах обеспечивает сопротивление торможения. В отличие от естественных сопротивлений (сила сопротивления качению или скатывающая сила) сила торможения может регулироваться от нуля до максимального значения, соответствующего экстренному торможению.

Если тормозящее колесо не проскальзывает по поверхности дороги, то кинетическая энергия автомобиля переходит в работу трения тормозного механизма и частично в работу сил естественных сопротивлений. При интенсивном торможении колесо может быть заблокировано тормозным механизмом, тогда оно скользит по дороге юзом и работа трением имеет место между шиной и опорной поверхностью.
По мере увеличения интенсивности торможения растут затраты энергии на проскальзывание шин, вследствие чего увеличивается их износ. Особенно велик износ шин при блокировке колес на дорогах с твердым покрытием и при высоких скоростях скольжения.
Торможение с блокировкой колес нежелательно и по условиям безопасности движения, поскольку на заблокированном колесе тормозная сила значительно меньше, чем при торможении на грани блокировки. Кроме того, при скольжении по дороге автомобиль теряет управляемость и устойчивость.
Предельное значение тормозной силы определяется коэффициентом сцепления φx колес с дорогой:
Для всех колес двухосного автомобиля:
где Ртор1 и Ртор2 – тормозные силы на колесах передней и задней оси автомобиля соответственно; G – вес автомобиля.
Уравнение движения автомобиля при торможении
Для вывода уравнения движения автомобиля при торможении спроецируем все силы, действующие на автомобиль при торможении (рис. 1) на плоскость дороги:
где Рf – сила сопротивления качению;
Ртд – сила трения в двигателе, приведенная к колесам; зависит от рабочего объема двигателя, передаточного числа трансмиссии, радиуса колеса и КПД трансмиссии;
Рα – сила сопротивления подъему;
Рω – сила сопротивления воздуха;
Рj – сила инерции при поступательном движении;
Рг – сила гидравлического сопротивления в агрегатах трансмиссии, обусловленная вязкостью смазочного материала.

Для упрощения расчетов принимаем некоторые допущения, которые несуществленно повлияют на результаты.
При выключенном сцеплении или нейтральной передаче в коробке передач Ртд = .
Учитывая, что скорость автомобиля во время торможения падает, можно принять силу сопротивления воздуха Рω = 0.
Так как сила гидравлического сопротивления трансмиссии Рг мала по сравнению силой Ртор , ею тоже можно пренебречь, особенно при экстренном торможении.
Принятые допущения позволяют переписать уравнение (1) в упрощенном виде:
Учитывая формулы (1) и (2), получим:
где m – масса автомобиля; jз – замедление автомобиля.
Разделив обе части уравнения на силу тяжести автомобиля, получим:
где g – ускорение свободного падения.
Показатели тормозной динамичности
Показателями тормозной динамичности автомобиля являются: замедление jз , время торможения tтор и тормозной путь Sтор .
Замедление автомобиля
Роль различных сил при замедлении автомобиля в процессе торможения неодинакова. При небольших скоростях пренебрегают силой сопротивления воздуха, поскольку она незначительна.
С учетом этого уравнение замедления будет иметь вид:
Так как коэффициент продольного сцепления колеса с опорной поверхностью φx обычно значительно больше коэффициента сопротивления дороги ψ , то при торможении автомобиля на грани блокировки, когда усилие прижатия тормозных колодок таково, что дальнейшее увеличение этого усилия приведет к блокировке колес, величиной ψ в уравнении (3) можно пренебречь.
Тогда получим:
При торможении с отключенным двигателем коэффициент вращающихся масс можно принять равным единице ( δвр от 1,02 до 1,04), тогда получим:
Если при торможении автомобиля коэффициент сцепления φx колес с дорогой не меняется, то величина замедления остается постоянной, независимо от скорости движения.
Время торможения
Время tо торможения автомобиля до полной остановки складывается из отрезков времени:
где tр – время реакции водителя, в течение которого он принимает решение и переносит ногу на педаль тормоза, оно составляет 0,2…0,5 с;
tпр – время срабатывания привода тормозного механизма, т. е. в течение этого промежутка времени происходит перемещение деталей в приводе. Время срабатывания привода зависит от типа привода и его технического состояния: для гидропривода tпр = 0,005…0,07 с для дисковых тормозных механизмов и tпр = 0,15…1,2 с для барабанных тормозных механизмов; для систем с пневматическим приводом tпр = 0,2…0,4 с;
tн – время нарастания замедления. С момента соприкосновения деталей в тормозном механизме замедление увеличивается с нуля до того установившегося значения, которое обеспечивает сила, развиваемая в приводе тормозного механизма. Время нарастания замедления может меняться в пределах от 0,05 до 0,2 и зависит от типа автомобиля, состояния дороги, дорожной ситуации, квалификации и состояния водителя, состояния тормозной системы. Оно возрастает с увеличением веса автомобиля и уменьшением коэффициента сцепления колес с дорогой;
tуст – врем движения с установившимся замедлением или время торможения с максимальной интенсивностью соответствует тормозному пути. В этот период времени замедление автомобиля практически постоянно.
Считая, что нарастание замедления и снижение скорости осуществляются по линейному закону, а максимальная интенсивность торможения может быть получена только при полном использовании коэффициента сцепления φx , полное время торможения автомобиля можно определить по формуле:
где v – скорость движения автомобиля до начала торможения;
tсумм = tр + tпр + 0,5 tн – время до начала установившегося замедления.
Тормозной путь
Величина тормозного пути зависит от характера замедления автомобиля.
Обозначив пути, проходимые автомобилем за время tр , tпр , tн и tуст соответственно Sр , Sпр , Sн и Sуст , можно записать, что полный остановочный путь Sо автомобиля от момента обнаружения препятствия до полной остановки может быть представлен в виде суммы:
Первые три слагаемые представляют собой путь пройденный автомобилем за время tсумм . Он может быть представлен, как
С учетом допущений, позволяющих пренебречь силами сопротивления воздуха и дороги можно вывести формулу полного остановочного пути автомобиля:
где jуст – максимальное замедление автомобиля, равное установившемуся замедлению. Значение jуст можно определить опытным путем, используя прибор для измерения замедления движущегося транспортного средства – деселерометр.
Источник
Тормозной момент на колесе АТС




![]()
![]()
Момент МТ завист от конструкции тормозного механизма, от конструкции тормозного привода. Для большинства типов тормозных приводов сила нажатия на колоджку пропорциональна давлению, развиваемому в тормозном приводе Р при торможении. Тогда величина тормозящего момента:
 ,
,
где g — коэффициент пропорциональности, зависящий от многих факторов, изменяется в широких пределах, для каждого АТС величина g относительно постоянная.
В резулььтате действия тормозного момента в зоне контакта шины с дорогой возникает тормозная сила:
 .
.
Учитывая касательные реакции, действующие на оси АТС при тормоджении, а также приняв, что торможение осуществляется с отключенным двигателем можем отметить, что увеличение тормозного момегта сопровождается увеличением касательной реакции дороги, однако это продолжается лишь до тех пор, пока касательная реакция не достигнет своего максимального значения, т.е. сцепление шины с дорогой
 .
.
Тормоза современных АТС могут развивать момент, превышающий момент силы сцепления шины с дорогой, поэтому часто на практике наблюдается юз колес, т.е блокировка и скольжение по дороге невращающегося колеса. До блкировки колеса имели между тормозными прокладками и барабанами силу трения скольжения, а в зоне контакта шины с дорогой силу трения покоя. После блокировки идет обратное изменение сил. При блокировке затраты энергии на трение в тормозе и качение колеса прекращаются. Почти все энергия выделяетс в месте контакта шины с дорогой. Повышение температуры шины приводит к размягчению резины, а значит еще уменьшению коэфициента сцепления. Поэтому наибольшая эфективность достигается в случае качения колеса на пределе блокировки.
Схема сил, действующих на АТС при торможении.
Реакции RX1 и RX2 различны в различных случаях торможения.
— экстренное – цель – максимальная скорость остановки АТС;
— аварийное – цель – предотвращение ДТП;
— служебное – цель – изменение скорости движения при движении в транспортном потоке – это главное торможение.
Все типы торможения деляться на полное и неполное. При экстренном торможении продольные реакции RX1 и RX2 являются максимальными (RX= RXmax). Такой случай торможения называют с полным использованием сил сцепления.
Рассмотрим случай при следующих допущениях:
1. Реакция RX достичает максимального значения одновременно на всех колесах.
2. Коэфициенты jх всех колес одинаковы и неизменны на всем пути торможения.
Процесс торможения при принятых допущениях может быть описан графиком зависимости j3=f(t) (замедление – функция от времени), имеющим следующий вид.
Начало координат соответствует момменту нажатия на тормозную педаль – это и есть начало торможения. Для лучшей илюстрации на график наносят кривую зависимости va=f(t), при этом изменение скорости может иметь следующий вид Þ.
tc – время срабатывания тормозного привода, зависящее от величин зазоров в механизмах, типа тормозного механизма, его технического состояния. При этом в общем случае изменение величины замедления идет в нарастающем плане. После срабатывания механизма и привода идет гашение скорости, а велиичина замедления практически постоянна. Время от начала отпускания тормозной педали до появления зазоре в механизмах. Для характеристики тормозных механизмов тормозного привода и качества тормозной системы АТС существует параметр, определяющий общее время остановки автомобиля:
 ,
,
t1 – время реакции водителя, с;
t2 – время между нажатием на тормозную педаль и началом действия тормозов, с;
t3 – время увеличения замедления, с;
t4 –время полного торможения, с.
Сумма (t2+t3) – время срабатывания тормозного привода. Из всех представленых величин аналитечески возможно определить лишь время полного торможения, остальные – экспериментально. При экстремалном торможении тормозная сила с несколько раз выше, чем сила сопротивления ветра Рв и сила сопротивления подьему РП. При расчетах этими силами пренебрегают. Величина замедления согласно допущений будет равна:
 .
.
При всех других значениях использования веса данное соотношение недействительно.
Для приближенния результатов экспериментальных данных к расчетным в формулуопределения замедления вводят коэффициент эфективности торможения, тогда
 ,
,
kэ показывает во сколько раз действие замедления автомобиля меньше теоретического максимально возможного на данной дороге. Для легковых — kэ=1,2; для грузовых kэ=1,3…1,4.
Составляющую времени торможения t4 возможно определить численым интегрированиет выражения (1).
Найдя по графику замедление для нескольких значений скорости величины мгновенных замедлений определяют среднее замедление в каждом интервале скорости. Опредеив приращение времени на каждом интервале и суммировав все эти приращения к полному времени торможения в начальный момент определяем время движения автомобиля при торможении. Путь движения автомобиля при торможении также определяем графо-аналитическим способом, обозначив путь прохождения автомобиля за каждый интервал времени получаем выражение:
 .
.
Выполнив ряд преобразований и читывая, что время, соответствующее движению автомобиля с установившимся замедлением изменяется по закону близкому к линейному, устанавливаем величину замедления:
 .
.
Определив скорость в начальный момент торможения и время установившегося торможения определим скорсть, соответствующую началу движения с установившимся зымедлением:
 .
.
Путь движения автомобиля при торможении определяют согласно отмеченому рануу графо-аналитическому способу либо экспериментальным путем. Особое значние и влияние на эфективность торможения АТС оказывают условия, при которых происходит торможение.
Источник

Тема: Найти величину тормозящего момента (Прочитано 10583 раз)
0 Пользователей и 1 Гость просматривают эту тему.
Маховик, представляющий собой сплошной диск радиусом R = 0,2 м и массой m = 2 кг вращался с постоянной угловой скоростью вокруг оси симметрии перпендикулярной плоскости диска. Найти величину тормозящего момента, под действием которого маховик остановился через t = 20 с после начала торможения, сделав N = 400 оборотов. Сделать рисунок.
« Последнее редактирование: 30 Ноября 2014, 14:41 от Сергей »

Записан
Решение.
Момент силы торможения определим по формуле:
М = J∙ε (1)
.
ε – угловое ускорение, вращение равнозамедленное и конечная скорость равна нулю.
[ varepsilon =frac{omega }{t} (2), omega =2cdot pi cdot nu (3), nu =frac{N}{t} (4). ]
ω – угловая скорость, ν – количество оборотов в единицу времени.
J – момент импульса диска.
[ J=frac{mcdot {{R}^{2}}}{2} (5). ]
Подставим (4) и (3) в (2), (2) и (5) в (1) определим момент силы торможения.
[ M=frac{pi cdot mcdot Ncdot {{R}^{2}}}{{{t}^{2}}}. ]
М = 0,251 Н∙м.
Ответ: 0,251 Н∙м.
« Последнее редактирование: 06 Декабря 2014, 06:48 от alsak »
Записан
6.1.1. Процесс
торможения колёсной машины. Критерии
тормозных свойств колёсной машины
Потребность
в торможении транспортного средства
возникает в следующих случаях:
– при необходимости
снизить скорость движения или остановить
машину;
– когда нужно
предотвратить повышение скорости при
движении машины на спусках;
– чтобы удержать
машину в неподвижном положении на
стоянках.
Способность
к принудительному снижению скорости и
быстрой остановке – важнейшее динамическое
свойство машины, влияющее на её
эксплуатационные показатели и имеющее
большое значение для безопасности
движения. Снижению скорости препятствует
накопленная машиной при движении
кинетическая энергия, которую нужно
погасить. С этой целью создают
дополнительные искусственные сопротивления
движению.
Основной
источник дополнительных сопротивлений
движению – система тормозов, посредством
которой создаются моменты трения,
препятствующие вращению колёс. В качестве
тормозного средства используют также
двигатель, который в этом случае не
отъединён от трансмиссии и приводится
во вращение от колёс.
Наряду с
искусственно создаваемыми сопротивлениями
на машину при торможении действуют ещё
сопротивления дороги и воздуха, которые
тоже влияют на замедление движения.
В соответствии
с этим различают следующие способы
торможения колёсной машины: с отъединённым
двигателем; непосредственно двигателем.
Движение
машины при торможении выражается
уравнением, которое может быть получено
из ранее рассмотренного дифференциального
уравнения движения колёсной машины.
При этом касательную силу тяги
следует заменить тормозной силой
![]()
,
взяв её со знаком минус, так как она
направлена против движения. Тогда
![]()
,
где
![]()
–
замедление (отрицательное ускорение)
движения.
Для оценки
тормозных свойств колёсной машины
принимают следующие критерии (показатели):
– максимальная
величина замедления
![]()
,
которая может быть достигнута при
торможении в заданных условиях;
– минимальный путь
торможения
![]()
,
проходимый машиной от начала торможения
до того момента, когда её скорость
снизится до заданного значения;
– минимальное время
торможения
![]()
,
требуемое для прохождения пути
.
6.1.2. Торможение
с отъединённым двигателем
Такой способ
торможения применяют наиболее часто.
В этом случае муфта сцепления выключается,
и двигатель не оказывает влияние на
процесс торможения. Тормозная сила
определяется выражением
![]()
,
где
![]()
–
сумма моментов трения на всех колёсных
тормозах.
Дифференциальное
уравнение движения машины при торможении
запишется

,
где
–
замедление машины;
![]()
–
коэффициент учёта вращающихся масс без
учёта момента инерции двигателя
.
Замедление
будет максимальным, а путь и время
торможения соответственно минимальными,
если тормозное усилие имеет максимальное
значение
![]()
.
При исправных
тормозах величина максимального
тормозного усилия ограничивается
сцеплением тормозимых колёс с дорогой
т.е.
![]()
,
где
![]()
–
суммарная нормальная реакция дороги
на тормозимые колёса;
– максимальная величина коэффициента
сцепления колёс с дорогой, возможная в
данных условиях.
Коэффициент
сцепления
достигает при торможении наибольшего
значения, когда колёса начинают заметно
проскальзывать, но не доведены до «юза»,
т.е. ещё не прекратили вращаться. Поэтому
при торможении не следует доводить
колёса до «юза» т.к. снижается максимальное
тормозное усилие
и повышается опасность заноса машины.
Субъективная
оценка процесса торможения, замедленная
реакция водителя и отсутствие контроля
над значением тормозного усилия на
колёсах в большинстве случаев не
позволяют избежать отмеченных негативных
явлений при торможении и наиболее
эффективно использовать тормозные
свойства автомобиля. Поэтому создают
устройства на основе использования
микропроцессорной техники и мини-ЭВМ,
автоматически управляющие работой
тормозов. Они обеспечивают оптимизацию
тормозной силы применительно к конкретным
условиям торможения, предотвращают
занос и блокировку тормозимых колёс.
Подставим в
дифференциальное уравнение движения
машины при торможении вместо силы
![]()
её максимальное значение
.
Сопротивлением воздуха при интенсивном
торможении можно пренебречь вследствие
быстрого снижения скорости движения.
Сопротивление качению входит в состав
тормозного усилия. Таким образом, из
всех сил сопротивления движению, входящих
в
остаётся только сопротивление подъёма
.
С учётом этого получаем следующее
выражение максимального замедления
при торможении с отъединённым двигателем:
![]()
.
Знак плюс
соответствует движению машины в гору,
что помогает торможению: чем больше
угол подъёма, тем интенсивнее замедляется
движение машины. Движение под уклон с
отрицательным углом
препятствует торможению.
Если тормоза
установлены на всех колёсах, как это
обычно делают на современных автомобилях,
то реакция
![]()
,
а максимальное замедление
![]()
.
На горизонтальной
дороге
![]()
.
Чем лучше
дорога, тем больше может быть замедление
машины при торможении. На твёрдых сухих
дорогах максимальное замедление на
горизонтальных участках может достигать
7…8 м/с![]()
.
Дождь, грязь, гололедица, снег и другие
факторы, отрицательно влияющие на
сцепление шин с дорогой, резко снижают
интенсивность торможения.
Как указывалось
ранее, максимальное замедление машины
при торможении следует применять лишь
в аварийных ситуациях. Аварийное
торможение встречается редко и составляет
лишь 5…10% общего числа торможений.
Обычное, так называемое служебное
торможение происходит со значительно
меньшей интенсивностью. Результаты
наблюдений показали, что опытные водители
замедляют движение перед плановыми
остановками с интенсивностью 1,5…2 м/с
.
Длина тормозного
пути может быть определена из условия,
что работа, совершаемая машиной за время
торможения, должна быть равна кинетической
энергии, потерянной ею за это время. Так
как тормозной путь будет минимальным
при наиболее интенсивном торможении,
т.е. когда тормозная сила имеет максимальное
значение
,
то указанное условие можно записать
следующим уравнением:
![]()
,
где
и
– скорости автомобиля соответственно
в начале и конце торможения.
Принимая в
этом уравнении
и учитывая, что
![]()
,
получаем минимальный путь торможения
![]()
.
Если торможение
происходит с замедлением
![]()
,
то тормозной путь
![]()
,
т.е.
![]()
.
Если торможение
осуществляется на горизонтальной дороге
с замедлением
![]()
до полной остановки машины
![]()
,
то минимальный тормозной путь
![]()
,
где
– скорость движения в начальный момент
торможения машины.
Из полученных
формул видно, что на величину минимального
тормозного пути
оказывает влияние:
– начальная скорость
движения машины, чем
![]()
,
тем
![]()
;
– коэффициент
сцепления колёс с дорогой, чем
![]()
,
тем
![]()
и наоборот;
– максимальная
величина замедления, чем
![]()
,
тем
.
Следует
отметить, что при выводе этих формул не
учитывалось:
– время реакции
водителя
![]()
;
– время срабатывания
тормозной системы (![]()
для
гидравлического привода тормозов,
![]()
для пневматического привода);
– эксплуатационные
факторы, снижающие эффективность
торможения. Известно, что тормозные
усилия на передних и задних колёсах не
одновременно достигают максимальных
значений по условиям сцепления с дорогой.
Одновременно это может происходить
только в том случае, если суммарная
тормозная сила распределяется между
передними и задними колёсами пропорционально
силам сцепления этих колёс с дорогой.
В то же время существующие конструкции
тормозных механизмов распределяют
тормозные усилия между передними и
задними колёсами в определённой пропорции
независимо от изменяющихся внешних
условий. Поэтому оптимальные соотношения
между тормозными усилиями передних и
задних колёс могут быть достигнуты
только в каких-то отдельных случаях. В
остальных случаях максимально возможные
по сцеплению тормозные усилия будут
только на колёсах одной из осей (либо
передней, либо задней) при недоиспользовании
сил сцепления колёс другой оси. Оптимальных
соотношений между тормозными усилиями
передних и задних колёс можно достичь
в случае автоматизации работы тормозов,
т.е. воздействия на них с помощью
микропроцессоров и ЭВМ.
– снижение
эффективности действия тормозов из-за
их загрязнённости, изношенности и
неправильной регулировки. Техническое
состояние тормозной системы может быть
учтено коэффициентом
![]()
снижения эффективности торможения,
показывающим, во сколько раз действительное
максимальное замедление автомобиля
меньше теоретически возможного на
данной дороге. При расчётах можно
принимать
![]()
для легковых и
![]()
для грузовых автомобилей и тракторов.
В связи с
указанными обстоятельствами полный
(остановочный) путь
![]()
,
необходимый для остановки машины, больше
минимального расчётного тормозного
пути
.
Для определения полного остановочного
пути машины на горизонтальной дороге
можно использовать формулу:
![]()
.
Существенное
значение имеет также такой измеритель
тормозных свойств, как минимальное
время торможения
.
При его определении следует учитывать,
что машина при торможении движется
равномерно замедленно, поскольку
сопротивление движению в это время
приблизительно постоянно. В соответствии
с этим средняя скорость при торможении
,
а минимальное время эффективного
торможения (без учёта подготовительных
этапов)
![]()
.
Из всего
изложенного следует, что существенное
значение для повышения эффективности
торможения имеют следующие конструктивные
и эксплуатационные факторы:
– уменьшение времени
реакции водителя и времени срабатывания
тормозной системы;
– одновременное
торможение всех колёс и оптимальное
распределение между ними тормозных
усилий;
– предотвращение
блокировки колёс;
– содержание
тормозной системы в исправном техническом
состоянии и правильное её регулирование;
– автоматизация
процесса торможения с использованием
микропроцессорных средств и мини-ЭВМ.
6.1.3. Торможение
двигателем
При торможении
двигателем муфта сцепления включена.
Карбюраторный двигатель работает на
режиме холостого хода с включённым
зажиганием, а дизель – с минимальной
подачей топлива, достаточной для того,
чтобы он не заглох.
Двигатель,
включённый в тормозную систему машины,
создаёт на ведущих колёсах два
противоположно направленных момента:
тормозной момент
![]()
,
вызываемый сопротивлениями, действующими
в двигателе, и ведущий момент
![]()
,
создаваемый касательными силами инерции,
возникающими в результате снижения
скорости движения тормозимых масс
двигателя. Первый из них способствует
торможению машины, а второй – препятствует.
Использование двигателя для торможения
может дать эффект только при условии,
что
![]()
.
Величина
тормозного момента может быть определена
по формуле
![]()
,
где
![]()
–
тормозной момент на коленчатом валу
двигателя.
Инерционный
момент
,
возникающий на ведущих колёсах машины
![]()
,
где
–
приведённый к коленчатому валу момент
инерции движущихся масс двигателя и
ведущих частей муфты сцепления;
–
угловое замедление коленчатого вала
двигателя.
Представим
угловое замедление коленчатого вала
двигателя в виде
![]()
.
Тогда инерционный
момент
![]()
.
Подставляя в
неравенство
значения указанных моментов, получаем
условие применимости метода торможения
двигателем:
![]()
,
откуда
![]()
.
Если замедление
превышает указанные пределы, то торможение
двигателем нецелесообразно и может
принести только вред (энергия двигателя
гасится в тормозе). Максимальное значение
замедления, при превышении которого
двигатель должен быть обязательно
отключен, зависит главным образом от
тормозного момента двигателя и от
приведённого момента инерции его
движущихся масс. Чем меньше тормозной
момент
![]()
и больше момент инерции
,
тем ниже значение замедления, допустимое
при торможении двигателем.
Для повышения
эффективности этого способа торможения
в двигателях устанавливают клапаны для
дросселирования выпуска газов или
другие приспособления, повышающие
тормозной момент двигателя
.
Торможение
двигателем целесообразно применять:
– когда целью
торможения является сохранение скорости
движения или некоторое её снижение;
– на кратковременных
служебных замедлениях;
– на длинных крутых
спусках в качестве дополнительного
тормозного средства для уменьшения
нагрева тормозов.
Тормозной
момент, создаваемый двигателем, равномерно
распределяется дифференциалом между
правыми и левыми колёсами. Это снижает
общую возможную неравномерность
распределения тормозных усилий между
колёсами и уменьшает вероятность
блокировки одного из колёс. Последнее
обстоятельство способствует повышению
устойчивости машины против заноса, в
особенности на мокрых и скользких
дорогах.
При наличии
гидромеханической трансмиссии торможение
двигателем применять нельзя, поскольку
гидротрансформатор способен передавать
крутящий момент только в одном направлении,
т.е. от двигателя к ведущим колёсам. В
этом случае в качестве тормоза может
быть использован гидротрансформатор,
если он оснащён теми или иными
приспособлениями, создающими дополнительные
сопротивления потоку жидкости внутри
круга циркуляции жидкости.
6.1.4. Особенности
торможения автомобильного и тракторного
поезда
Торможение
авто и тракторного поезда можно
рассматривать как суммарное торможение
отдельных шарнирно-соединённых между
собой повозок, каждая из которых получает
соответственные замедления. При этом
кроме обеспечения рассмотренных выше
тормозных свойств, необходимо согласовать
действие тормозов тягача и прицепов,
чтобы предотвратить набегание прицепов
на тягач и одного прицепа на другой.
Добиться
абсолютной синхронности работы тормозов
тягача и прицепов при любых условиях
движения поезда возможно лишь в случае
применения микропроцессорной техники
и автоматизации процесса торможения.
Поэтому целесообразно, чтобы прицепы
начинали тормозиться раньше и
оттормаживались бы позже, чем тягач,
причём у задних прицепов эта разница
должна быть больше, чем у передних.
Кроме более
раннего торможения, важно так распределить
тормозные силы между тягачом и прицепами,
чтобы поезд при торможении находился
в слегка растянутом состоянии, благодаря
чему он становиться менее чувствительным
к боковым возмущениям. Наличие в сцепке
усилий сжатия способствует отклонению
тягача и прицепа от их нормальных
траекторий при наличии соответствующих
внешних воздействий. Поэтому при анализе
тормозных свойств поезда принимается
в качестве дополнительного фактора
усилие в сцепке.
Назовём
парциальными замедлениями тягача и
прицепа замедления, которые могли бы
быть получены при торможении каждого
из них в отдельности. Обозначим их
соответственно через
![]()
и
![]()
.
Очевидно, что выполнение требования об
отсутствии в сцепке сжимающих усилий
возможно, если
![]()
.
При выполнении
указанного условия могут встретиться
два случая:
1.
![]()
.
Это позволяет удовлетворить указанное
требование, т.е. тормозные свойства
поезда будут использованы полностью.
2.
![]()
.
Чтобы не допустить в этом случае
возникновение в сцепке сжимающих усилий,
нужно ограничить тормозную силу тягача
и таким образом уменьшить его замедление.
Принимая усилие в сцепке равным нулю,
получаем, что в этом случае допустимое
замедление тягача
![]()
.
Соответственно и допустимое максимальное
замедление поезда ограничено величиной
![]()
.
Минимальный
тормозной путь поезда
![]()
при движении до полной остановки на
горизонтальной дороге имеет, согласно
ранее полученному уравнению, следующее
значение:

.
Из этого
выражения видно, что необходимость
снижения максимального замедления
поезда в целях устранения сжимающих
усилий в сцепке приводит к увеличению
минимального тормозного пути поезда.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Геометрический смысл перемещения заключается в том, что перемещение есть площадь фигуры, заключенной между графиком скорости, осью времени и прямыми, проведенными перпендикулярно к оси времени через точки, соответствующие времени начала и конца движения.
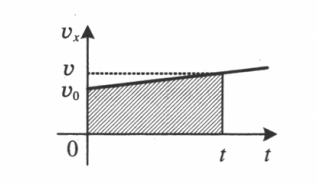
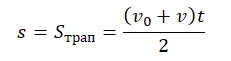
При равноускоренном прямолинейном движении перемещение определяется площадью трапеции, основаниями которой служат проекции начальной и конечной скорости тела, а ее боковыми сторонами — ось времени и график скорости соответственно. Поэтому перемещение (путь) можно вычислить по формуле:
Формула перемещения
Пример №1. По графику определить перемещение тела в момент времени t=3 с.
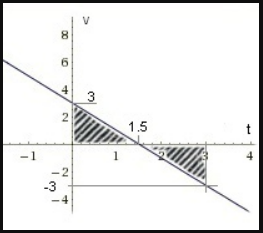
Перемещение есть площадь фигуры, ограниченной графиком скорости, осью времени и перпендикулярами, проведенными к ней. Поэтому в нашем случае:

Извлекаем из графика необходимые данные:
- Фигура 1. Начальная скорость — 3 м/с. Конечная — 0 м/с. Время — 1,5 с.
- Фигура 2. Начальная скорость — 0 м/с. Конечная — –3 м/с. Время — 1,5 с (3 с – 1,5 с).
Подставляем известные данные в формулу:

Перемещение равно 0, так как тело сначала проделало некоторый путь, а затем вернулось в исходное положение.
Варианты записи формулы перемещения
Конечная скорость движения тела часто неизвестна. Поэтому при решении задач вместо нее обычно подставляют эту формулу:
v = v0 ± at
В итоге получается формула:
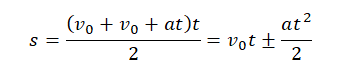
Если движение равнозамедленное, в формуле используется знак «–». Если движение равноускоренное, оставляется знак «+».
Если начальная скорость равна 0 (v0 = 0), эта формула принимает вид:
Если неизвестно время движения, но известно ускорение, начальная и конечная скорости, то перемещение можно вычислить по формуле:
Пример №2. Найти тормозной путь автомобиля, который начал тормозить при скорости 72 км/ч. Торможение до полной остановки заняло 3 секунды. Модуль ускорения при этом составил 2 м/с.
Перемещение при разгоне и торможении тела
Все перечисленные выше формулы работают, если направление вектора ускорения и вектора скорости совпадают (а↑↑v). Если векторы имеют противоположное направление (а↑↓v), движение следует описывать в два этапа:
Этап торможения
Время торможения равно разности полного времени движения и времени второго этапа:
t1 = t – t2
Когда тело тормозит, через некоторое время t1 оно останавливается. Поэтому скорость в момент времени t1 равна 0:
0 = v01 – at1
При торможении перемещение s1 равно:
Этап разгона
Время разгона равно разности полного времени движения и времени первого этапа:
t2 = t – t1
Тело начинает разгоняться сразу после преодоления нулевого значения скорости, которую можно считать начальной. Поэтому скорость в момент времени t2 равна:
v = at2
При разгоне перемещение s2 равно:
При этом модуль перемещения в течение всего времени движения равен:
s = |s1 – s2|
Полный путь (обозначим его l), пройденный телом за оба этапа, равен:
l = s1 + s2
Пример №3. Мальчик пробежал из состояния покоя некоторое расстояние за 5 секунд с ускорением 1 м/с2. Затем он тормозил до полной остановки в течение 2 секунд с другим по модулю ускорением. Найти этот модуль ускорения, если его тормозной путь составил 3 метра.
В данном случае движение нужно разделить на два этапа, так как мальчик сначала разогнался, потом затормозил. Тормозной путь будет соответствовать второму этапу. Через него мы выразим ускорение:
Из первого этапа (разгона) можно выразить конечную скорость, которая послужит для второго этапа начальной скоростью:
v02 = v01 + a1t1 = a1t1 (так как v01 = 0)
Подставляем выраженные величины в формулу:

Перемещение в n-ную секунду прямолинейного равноускоренного движения
Иногда в механике встречаются задачи, когда нужно найти перемещение тела за определенный промежуток времени при условии, что тело начинало движение из состояния покоя. В таком случае перемещение определяется формулой:
За первую секунду тело переместится на расстояние, равное:
За вторую секунду тело переместится на расстояние, равное разности перемещения за 2 секунды и перемещения за 1 секунду:

За третью секунду тело переместится на расстояние, равное разности перемещения за 3 секунды и перемещения за 2 секунды:
Видно, что за каждую секунду тело проходит перемещение, кратное целому нечетному числу:

Из формул перемещений за 1, 2 и 3 секунду можно выявить закономерность: перемещение за n-ную секунду равно половине произведения модуля ускорения на (2n–1), где n — секунда, за которую мы ищем перемещение тела. Математически это записывается так:
Формула перемещения за n-ную секунду
Пример №4. Автомобиль разгоняется с ускорением 3 м/с2. Найти его перемещение за 6 секунду.
Подставляем известные данные в формулу и получаем:
Таким же способом можно найти перемещение не за 1 секунду, а за некоторый промежуток времени: за 2, 3, 4 секунды и т. д. В этом случае используется формула:
где t — время одного промежутка, а n — порядковый номер этого промежутка.
Пример №5. Ягуар ринулся за добычей с ускорением 2,5 м/с2. Найти его перемещение за промежуток времени от 4 до 6 секунд включительно.
Время от 4 до 6 секунд включительно — это 3 секунды: 4-ая, 5-ая и 6-ая. Значит, промежуток времени составляет 3 секунды. До наступления этого промежутка успело пройти еще 3 секунды. Значит, время от 4 до 6 секунд — это второй по счету временной промежуток.
Подставляем известные данные в формулу:

Проекция и график перемещения
Проекция перемещения на ось ОХ. График перемещения — это график зависимости перемещения от времени. Графиком перемещения при равноускоренном движении является ветка параболы. График перемещения при равноускоренном движении, когда вектор скорости направлен в сторону оси ОХ (v↑↑OX), а вектора скорости и ускорения сонаправлены (v↑↑a), принимает следующий вид:
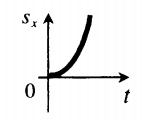
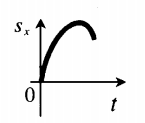
График перемещения при равнозамедленном движении, когда вектор скорости направлен в сторону оси ОХ (v↑↑OX), а вектора скорости и ускорения противоположно (v↓↑a), принимает следующий вид:
Определение направления знака проекции ускорения по графику его перемещения:
- Если ветви параболического графика смотрят вниз, проекция ускорения тела отрицательна.
- Если ветви параболического графика смотрят вверх, проекция ускорения тела положительна.
Пример №6. Определить ускорение тела по графику его перемещения.

Перемещение тела в момент времени t=0 с соответствует нулю. Значит, ускорение можно выразить из формулы перемещения без начального ускорения. Получим:
Теперь возьмем любую точку графика. Пусть она будет соответствовать моменту времени t=2 с. Этой точке соответствует перемещение 30 м. Подставляем известные данные в формулу и получаем:
График пути
График пути от времени в случае равноускоренного движения совпадает с графиком проекции перемещения, так как s = l.
В случае с равнозамедленным движением график пути представляет собой линию, поделенную на 2 части:
- 1 часть — до момента, когда скорость тела принимает нулевое значение (v = 0). Эта часть графика является частью параболы от начала координат до ее вершины.
- 2 часть — после момента, при котором скорость тела принимает нулевое значение (v = 0). Эта часть является ветвью такой же, но перевернутой параболы. Ее вершина совпадает с вершиной предыдущей параболы, но ее ветвь направлена вверх.
Такой вид графика (возрастающий) объясняется тем, что путь не может уменьшаться — он либо не меняется (в состоянии покоя), либо растет независимо от того, в каком направлении, с какой скоростью и с каким ускорением движется тело.
Пример №7. По графику пути от времени, соответствующему равноускоренному прямолинейному движению, определить ускорение тела.
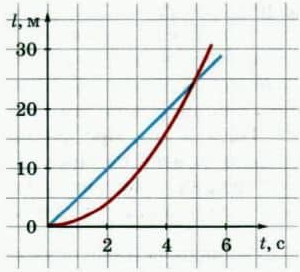
При равноускоренном прямолинейном движении графиком пути является ветвь параболы. Поэтому наш график — красный. График пути при равноускоренном прямолинейном движении также совпадает с графиком проекции его ускорения. Поэтому для вычисления ускорения мы можем использовать эту формулу:
Для расчета возьмем любую точку графика. Пусть она будет соответствовать моменту времени t=2 c. Ей соответствует путь, равный 5 м. Значит, перемещение тоже равно 5 м. Подставляем известные данные в формулу:
Задание EF18553
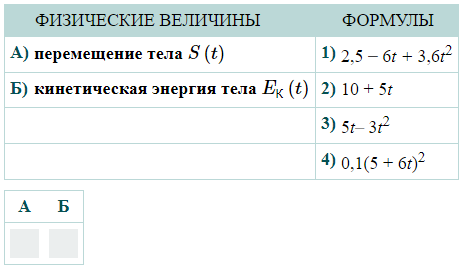 Тело массой 200 г движется вдоль оси Ох, при этом его координата изменяется во времени в соответствии с формулой х(t) = 10 + 5t– 3t2(все величины выражены в СИ).
Тело массой 200 г движется вдоль оси Ох, при этом его координата изменяется во времени в соответствии с формулой х(t) = 10 + 5t– 3t2(все величины выражены в СИ).
Установите соответствие между физическими величинами и формулами, выражающими их зависимости от времени в условиях данной задачи.
К каждой позиции первого столбца подберите соответствующую позицию из второго столбца и запишите в таблицу выбранные цифры под соответствующими буквами.
Алгоритм решения
1.Записать исходные данные и перевести их единицы измерения величин в СИ.
2.Записать уравнение движения тела при прямолинейном равноускоренном движении в общем виде.
3.Сравнить формулу из условия задачи с этим уравнением движения и выделить кинематические характеристики движения.
4.Определить перемещение тела и его кинетическую энергию.
5.Выбрать для физических величин соответствующую позицию из второго столбца таблицы и записать ответ.
Решение
Из условия задачи известна только масса тела: m = 200 г = 0,2 кг.
Так как тело движется вдоль оси Ox, уравнение движения тела при прямолинейном равноускоренном движении имеет вид:
x(t)=x0+v0t+at22
Теперь мы можем выделить кинематические характеристики движения тела:
• a/2 = –3 (м/с2), следовательно, a = –6 (м/с2).
Перемещение тела определяется формулой:
s=v0t+at22
Начальная координата не учитывается, так как это расстояние было уже пройдено до начала отсчета времени. Поэтому перемещение равно:
x(t)=v0t+at22=5t−3t2
Кинетическая энергия тела определяется формулой:
Ek=mv22
Скорость при прямолинейном равноускоренном движении равна:
v=v0+at=5−6t
Поэтому кинетическая энергия тела равна:
Ek=m(5−6t)22=0,22(5−6t)2=0,1(5−6t)2
Следовательно, правильная последовательность цифр в ответе будет: 34.
Ответ: 34
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18774
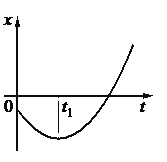
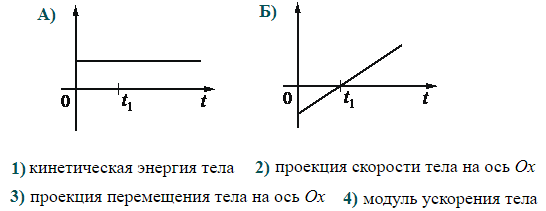
На рисунке показан график зависимости координаты x тела, движущегося вдоль оси Ох, от времени t (парабола). Графики А и Б представляют собой зависимости физических величин, характеризующих движение этого тела, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять.
К каждой позиции графика подберите соответствующую позицию утверждения и запишите в поле цифры в порядке АБ.
Алгоритм решения
- Определить, какому типу движения соответствует график зависимости координаты тела от времени.
- Определить величины, которые характеризуют такое движение.
- Определить характер изменения величин, характеризующих это движение.
- Установить соответствие между графиками А и Б и величинами, характеризующими движение.
Решение
График зависимости координаты тела от времени имеет вид параболы в случае, когда это тело движется равноускоренно. Так как движение тела описывается относительно оси Ох, траекторией является прямая. Равноускоренное прямолинейное движение характеризуется следующими величинами:
- перемещение и путь;
- скорость;
- ускорение.
Перемещение и путь при равноускоренном прямолинейном движении изменяются так же, как координата тела. Поэтому графики их зависимости от времени тоже имеют вид параболы.
График зависимости скорости от времени при равноускоренном прямолинейном движении имеет вид прямой, которая не может быть параллельной оси времени.
График зависимости ускорения от времени при таком движении имеет вид прямой, перпендикулярной оси ускорения и параллельной оси времени, так как ускорение в этом случае — величина постоянная.
Исходя из этого, ответ «3» можно исключить. Остается проверить ответ «1». Кинетическая энергия равна половине произведения массы тела на квадрат его скорости. Графиком квадратичной функции является парабола. Поэтому ответ «1» тоже не подходит.
График А — прямая линия, параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости ускорения от времени (или его модуля). Поэтому первая цифра ответа — «4».
График Б — прямая линия, не параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости скорости от времени (или ее проекции). Поэтому вторая цифра ответа — «2».
Ответ: 24
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18831
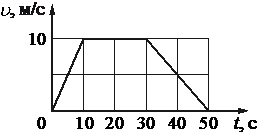
На рисунке представлен график зависимости модуля скорости υ автомобиля от времени t. Определите по графику путь, пройденный автомобилем в интервале времени от t1=20 с до t2=50 с.
Алгоритм решения
- Охарактеризовать движение тела на различных участках графика.
- Выделить участки движения, над которыми нужно работать по условию задачи.
- Записать исходные данные.
- Записать формулу определения искомой величины.
- Произвести вычисления.
Решение
Весь график можно поделить на 3 участка:
- От t1 = 0 c до t2 = 10 с. В это время тело двигалось равноускоренно (с положительным ускорением).
- От t1 = 10 c до t2 = 30 с. В это время тело двигалось равномерно (с нулевым ускорением).
- От t1 = 30 c до t2 = 50 с. В это время тело двигалось равнозамедленно (с отрицательным ускорением).
По условию задачи нужно найти путь, пройденный автомобилем в интервале времени от t1 = 20 c до t2 = 50 с. Этому времени соответствуют два участка:
- От t1 = 20 c до t2 = 30 с — с равномерным движением.
- От t1 = 30 c до t2 = 50 с — с равнозамедленным движением.
Исходные данные:
- Для первого участка. Начальный момент времени t1 = 20 c. Конечный момент времени t2 = 30 с. Скорость (определяем по графику) — 10 м/с.
- Для второго участка. Начальный момент времени t1 = 30 c. Конечный момент времени t2 = 50 с. Скорость определяем по графику. Начальная скорость — 10 м/с, конечная — 0 м/с.
Записываем формулу искомой величины:
s = s1 + s2
s1 — путь тела, пройденный на первом участке, s2 — путь тела, пройденный на втором участке.
s1 и s2 можно выразить через формулы пути для равномерного и равноускоренного движения соответственно:
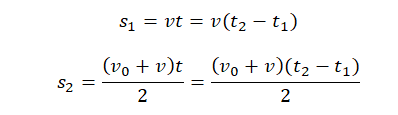
Теперь рассчитаем пути s1 и s2, а затем сложим их:
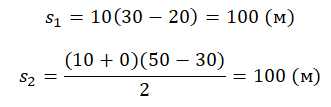
s1 + s2 = 100 + 100 = 200 (м)
Ответ: 200
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 25.3k
Какой момент называют тормозным моментом асинхронника
Тормозной момент – момент, развиваемый асинхронной машиной, в режиме торможения. В литературе встречается термин синоним: тормозящий момент. В рамках теории асинхронных электродвигателей рассматривают 3 режима торможения: генераторное, динамическое и торможение противовключением.
Под генераторным торможением понимают возникновение тормозного момента при условии превышении частоты вращения ротора над частотой магнитного поля. Подобное событие может произойти, например, в лебедке под действием опускаемого груза. При этом в случае возникновения ситуации с превышением частоты вращения над частотой магнитного поля происходит автоматическое переключение асинхронного двигателя в генераторный режим.
Динамическое торможение подразумевает переключение питания обмотки статора с переменного напряжения на постоянное. При этом обмотка статора будет генерировать постоянное неподвижное магнитное поле. В роторе, вращающемся относительно неподвижного магнитного поля статора, ЭДС и ток ротора меняют знак. Таким образом, направление электромагнитного момента изменяется, т.е. он становится тормозным.
Торможение противовключением – подразумевает реверс двигателя, в результате которого происходит торможение. Реверс осуществляется путем изменения порядка чередования фаз.
Другие статьи про тормозной момент:
Формулы для расчета величины тормозного момента.
Пример расчета тормозящего момента асинхронного двигателя.
Величина тормозного момента определяет время торможения асинхронного двигателя. Расчет этого параметра важен для подбора двигателей на станки, воздуходувки и другие устройства где важно обеспечить управляемое и предсказуемое торможение.
Что еще почитать на нашем сайте про моменты:
Обзор разновидности моментов асинхронной электрической машины.
| < Предыдущая | Следующая > |
|---|
www.i380.ru
Безопасность движения и тормозной момент
Серьезной проблемой является обеспечение безопасности эксплуатации автотранспортных средств. Автомобиль остается самым опасным транспортным средством, так как, имея массу от 1 до 50 т, он может двигаться со скоростью до 200 км/ч, удерживаясь на дороге только за счет трения колес о ее поверхность. Кинетическая энергия движущегося автомобиля опасна для окружающих.
Единственный способ справиться в критической ситуации с огромной энергией автомобиля — это своевременно снизить его скорость, т. е. притормозить. Торможение — одна из основных фаз движения любых транспортных средств, которое неоднократно повторяется в процессе работы и практически всегда завершает этот процесс.
Торможение может быть рабочее, аварийное, стояночное, а также служебное и экстренное. Экстренное и служебное торможения отличаются друг от друга интенсивностью, т. е. величиной замедления автомобиля. Экстренные торможения выполняются с максимальной интенсивностью и составляют 5—10% общего числа торможений. Служебные торможения применяют для остановки автомобиля в заранее намеченном месте или для плавного уменьшения его скорости. Замедление автомобиля при служебном торможении в 2—3 раза меньше, чем при экстренном.
Для интенсивного поглощения кинетической энергии движущегося автомобиля используют тормозные механизмы, которые создают на колесах искусственное сопротивление движению. При этом на ступицы колес автомобиля действуют тормозные моменты Мтор а между колесом и дорогой возникают касательные реакции дороги (тормозные силы Ртор) направленные навстречу движения.
Величина тормозного момента Мтор, создаваемого тормозным механизмом, зависит от его конструкции и давления в тормозном приводе. Для наиболее распространенных типов привода — гидравлического и пневматического — сила нажатия на тормозную колодку прямо пропорциональна давлению в приводе при торможении. Тормозной момент может быть определен по формуле
Mтоp = Vт*Pо
где Vт — коэффициент пропорциональности; Ро — давление в тормозном приводе.
Коэффициент от зависит от многих факторов (температуры, наличия воды и т. д.) и может изменяться в широких пределах.
ustroistvo-avtomobilya.ru
8. Определение необходимого значения тормозного момента и выбор тормоза.
Тормозной
момент определяется но формуле:
Mт
Мдв*К ,
где
К — коэффициент запаса торможения,
принимаемый согласно Правилам
Ростехнадзора равным: для легкого режима
работы — 1,5; для среднего — 1,75 и для тяжелого
— 2,0.
Мдв
– момент движущих сил; в нашем случае
тормоз установлен на валу двигателя,
поэтому Мдв равен моменту на валу
двигателя
Мдв
= Мб
/
(uр*
ηл
)
,
где
Мб
— момент на барабане, Мб
=
Sк
*
Dср
/2
= 13,6*0,273/2 = 1,856 кН*м
Мдв
= 1856 /(10*0,89) = 208,5 Н*м
Mт
208,5* 1,75 = 364,9 Н*м
По
таблице 7 принимаем колодочный тормоз
с электрогидравлическим толкателем
переменного тока ТКТГ — 300, имеющий
тормозной момент Mт = 800 Н*м > 364,9 Н*м,
диаметр тормозного шкива Dт = 300 мм и
гидротолкатель Т-45, ширина тормозного
шкива Вт
=
145 мм.
Выбранный
тормоз необходимо проверить по удельному
давлению на тормозной шкив.
Нормальное
давление колодки на шкив равно
N=
Mт
/(f*
Dт
)
,
где
f — коэффициент трения; f=0,35
для тормозная асбестовой ленты по чугуну
и стали; f=
0,42 для вальцованная ленты по чугуну и
стали.
N
= 364,9/(0,35*0,3) = 3475 Н
Удельное
давление между колодкой и шкивом
p=
N/F
,
где
F — расчетная площадь соприкосновения
колодки со шкивом,
F
= π
Dт
*B*(β*π/180)
,
где:
В — ширина колодки, В=Вт
—
(5…10 ) мм — для обеспечения полного
контакта между колодкой и шкивом;
Вт
– ширина тормозного шкива (табл. 8,9), для
ТКТГ-300 Вт
=
145 мм
;
β
—
угол обхвата шкива колодкой в градусах,
β
= 70° в тормозах конструкции ВНИИПТМАШ.
F
= 3,14* 300*140*(70*3,14/180)
= 161040,1
мм2
;
p=3475
/ 161040,1
= 0,021 Н/мм2
=
0,021 МПа
Допускаемая
величина давления в колодочных тормозах
рассматриваемого типа составляет 0,6
МПа, следовательно, выбранный тормоз
обладает требуемой работоспособностью.
По
полученным размерам необходимо вычертить
схему механизма и подготовиться к ответу
на контрольные вопросы.
КОНТРОЛЬНЫЕ
ВОПРОСЫ
-
Из
каких элементов состоит механизм
подъёма груза с электрореверсивной
лебёдкой, и от каких параметров зависит
грузоподъёмность и скорость подъёма
груза? -
Что
входит в понятие «режим работы»
грузоподъёмного механизма? -
Для
чего применяется полиспаст, и как
определяется кратность полиспаста,
вес и скорость груза? -
По
каким исходным данным и в каком порядке
выбирается типоразмер стального каната? -
Как
определяются диаметр и длина барабана
лебёдки? -
В
каком порядке выбирается электродвигатель
лебёдки? Что такое «ПВ%» в каталоге на
двигатели, и почему мощность двигателя
зависит от ПВ%? -
В
каком порядке выбирается стандартный
редуктор и как передаточное отношение
редуктора влияет на грузоподъёмность
и на скорость подъёма груза? -
Как
определяется передаточное число
зубчатой передачи и двухступенчатого
редуктора? -
В
каком порядке выбирается тормоз лебёдки
и как он работает?
Приложение
Таблица 2
ГОСТ 2688-66. Канат
двойной свивки типа ЛК-Р конструкции
6Х 19 (1+6+6/6)+1 о.с.(органический сердечник)
|
Диаметр каната, мм |
Площадь поперечного сечения проволок, |
Масса 100м смазанного каната, кг |
Маркировочная |
|||
|
160 |
170 |
180 |
190 |
|||
|
Разрывное |
||||||
|
4,2 4,6 5,0 5,4 6,8 8,1 8,8 9,5 11,5 12,5 13,5 15,0 16,5 17,5 19,5 21,0 22,0 24,0 25,0 27,5 30,5 |
7,01 8,41 10,02 11,89 17,85 26,18 31,19 36,69 51,68 58,69 64,05 86,27 104,56 114,56 143,63 174,78 184,50 226,46 289,16 288,68 349,68 |
6,54 7,78 9,35 11,00 16,65 24,42 29,40 34.23 48,22 54,75 59,76 80,50 97,50 106,80 134,00 163,10 172,10 205,70 223,10 267,40 326,20 |
9560 11400 18600 16100 24200 35500 42400 49900 70250 79800 87050 117000 141500 195000 155650 237700 250500 299800 325000 389500 475000 |
10100 12100 14400 17100 25700 37800 45000 52900 74650 84700 92500 124500 150500 165350 207000 255500 266000 318500 345500 418500 504500 |
10700 12800 15300 18100 27200 40000 47600 56100 79050 89600 97950 131500 159590 175100 219500 267400 282000 337250 365500 438500 534500 |
11300 13600 16100 19100 28800 42200 50300 59200 83450 94700 103450 138500 168500 184800 231500 282250 297500 356000 385500 462500 664000 |
Таблица 3
ГОСТ 3071-66. Канат
двойной свивки типа ТК, конструкции
6х37 (1+6+12+18) + 1 о.с.
|
Диаметр каната, мм |
Площадь поперечного сечения проволок, |
Масса 100м смазанного каната, кг |
Маркировочная |
|||
|
160 |
170 |
180 |
190 |
|||
|
Разрывное |
||||||
|
1,8 5,2 5,7 6,1 6,7 7,4 8,0 8,7 11,0 13,0 15,5 17,5 19,5 22,0 24,0 26,0 28,5 30,5 32,5 35,0 37,0 |
8,44 10,03 11,79 13,68 16,76 20,16 23,97 27,97 43,51 62,83 85,27 111,67 141,19 175,23 211,98 253,04 294,59 343,20 392,22 447,78 505,56 |
7,93 9,42 11,07 12,85 15,74 18,93 22,51 26,27 40,86 59,00 80,27 104,80 132,60 164,60 190,10 237,70 266,70 322,80 368,40 420,60 474,80 |
10000 13900 15400 17800 21900 26400 31400 36500 57000 82400 111500 146000 184500 229300 277500 331500 386000 450000 514500 624000 711000 |
11700 13900 16400 19200 23200 28000 33300 38900 50600 87300 118500 155000 196300 243500 295000 352300 410000 478000 546500 624500 701000 |
12300 11700 17800 20100 24600 28600 35300 41200 64200 92600 125500 164500 208000 258000 312500 373000 434500 506000 578500 660500 746000 |
13100 15500 18300 21200 26000 31100 37300 43500 67700 97500 132500 173500 219500 27250 370000 391000 458500 524500 610500 690500 787500 |
Таблица 4
Электродвигатели
крановые асинхронные (для кратковременного
– повторного режима работы) серии МТ и
МТК
|
Вели-чина |
Тип |
15% ПВ |
25% ПВ |
40 % ПВ |
L, мм |
В, мм |
|||
|
кВт |
об/мин |
кВт |
об/мин |
кВт |
об/мин |
||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
С фазовым ротором МТ |
|||||||||
|
I |
МТ-11-6 МТ–12-6 |
2,6 4,2 |
800 870 |
2,2 3,5 |
890 900 |
1,8 2,8 |
915 930 |
592 647 |
151 151 |
|
II |
МТ-21-6 МТ–22-6 |
6,0 9,0 |
930 955 |
5,0 7,5 |
945 950 |
4,0 6,0 |
955 960 |
682 735 |
172 172 |
|
III |
МТ-31-6 МТ–31-8 |
13,2 9,0 |
945 735 |
11,0 7,5 |
955 705 |
8,8 6,0 |
965 715 |
766 766 |
193 193 |
|
IV |
МТ-41-8 МТ–42-8 |
13,2 19,2 |
765 715 |
11,0 16,0 |
715 720 |
8,8 12,8 |
720 725 |
835 915 |
230 230 |
|
V |
МТ-51-8 МТ–52-8 |
26,5 38,0 |
720 725 |
22 30 |
725 720 |
17,5 24,0 |
730 735 |
975 1056 |
250 250 |
|
VI |
МТ-61-10 МТ–62-10 МТ-63-10 |
36 55 72 |
563 568 573 |
30 45 60 |
570 574 577 |
24 36 48 |
574 578 582 |
1152 1252 1347 |
320 320 320 |
|
VII |
МТ-71-10 МТ–72-10 МТ-73-10 |
96 120 159 |
579 581 582 |
80 100 125 |
583 584 585 |
64 80 100 |
586 587 588 |
1423 1493 1573 |
383 383 383 |
|
С короткозамкнутым ротором МТК |
|||||||||
|
I |
МТК-11-6 МТК–12-6 |
2,7 4,0 |
837 852 |
2,2 3,5 |
883 875 |
1,8 2,8 |
910 907 |
470 525 |
151 151 |
|
II |
МТК-21-6 МТК–22-6 |
6,2 9,0 |
880 880 |
5,0 7,5 |
910 905 |
4,2 6,3 |
925 922 |
558 611 |
172 172 |
|
III |
МТК-31-6 МТК–31-8 |
13,5 9,3 |
896 657 |
11,0 7,5 |
920 682 |
9,5 6,5 |
930 693 |
650 650 |
193 193 |
|
IV |
МТК-41-6 МТК–42-8 |
13,5 19,5 |
665 667 |
11 16 |
685 685 |
9,5 13,0 |
695 700 |
691 771 |
230 230 |
|
V |
МТК-51-8 МТК–52-8 |
26,5 33,5 |
625 681 |
22 28 |
692 695 |
17 20 |
705 708 |
819 899 |
255 255 |
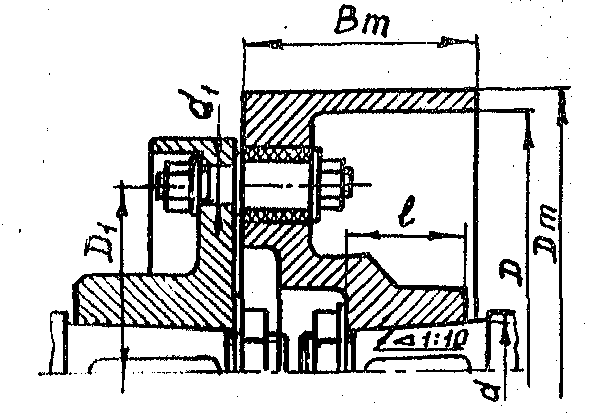
Таблица 5
Редукторы типа
РЦД
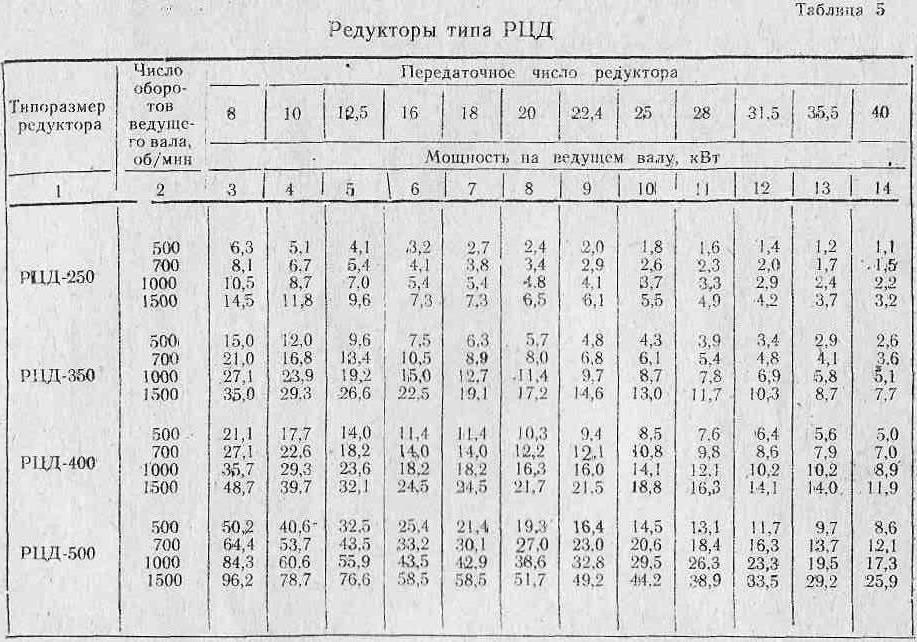
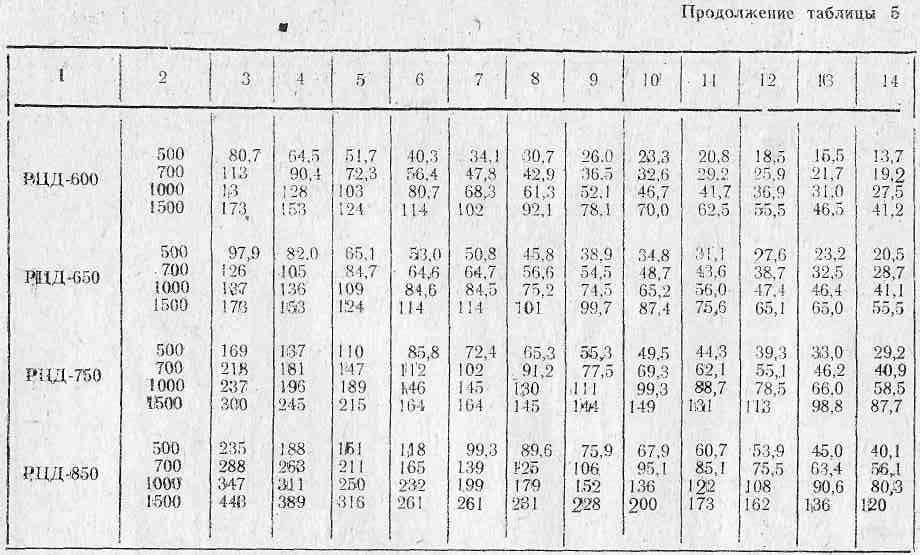
Таблица 6
Редукторы типа
РЦД. Основные и габаритные размеры, мм
|
Типоразмер |
Межосевые |
Н |
L |
Масса, кг (без масла) |
||
|
Ас |
Аб |
Ат |
||||
|
РЦД -175 РЦД РЦД РЦД РЦД РЦД РЦД РЦД РЦД -850 |
175 250 350 400 500 600 650 750 850 |
100 150 200 250 300 350 400 450 500 |
75 100 150 150 200 250 250 300 350 |
220 315 410 510 600 705 800 895 1000 |
400 520 700 800 985 1150 1255 1425 1595 |
45 87 160 250 380 640 835 1170 1545 |
Таблица 7
Основные параметры
и габаритные размеры колодочного тормоза
с электрогидравлическим толкателем
переменного тока
|
Тип тормоза |
Тормозной момент, Н*м |
Тип гидротолкателя |
Диаметр шкива Дт мм |
Масса тормоза с толкателем, кг |
|
ТКТГ-200 ТКТГ-300 ТКТГ-400 ТКТГ-500 ТКТГ-600 ТКТГ-700 ТКТГ-800 |
300 800 1500 2500 5000 8000 12500 |
Т-15 Т-45 Т-75 Т-75 Т-160 Т-160 Т-160 |
200 300 400 500 600 700 800 |
40 100 178 252 484 605 840 |
Таблица 8
Тормозные
шкивы-полумуфты. Размеры, мм
|
Поверхность трения шкива |
Д |
Д1 |
d |
d1 |
Число пальцев |
|
|
Диаметр, Дт |
Ширина, Вт |
|||||
|
200 300 400 500 600 |
95 145 185 210 215 |
185 280 370 470 570 |
110 190 250 290 490 |
49,5 69,5 89,5 89,5 89,5 |
20 20 35 37 49 |
4 6 6 8 8 |
Таблица 9
Тормозные шкивы
соединяемые с зубчатыми муфтами. Размеры,
мм
|
Поверхность трения шкива |
Д |
Д1 |
d |
d1 |
Число болтов |
|
|
Диаметр, Дт |
Ширина, Вт |
|||||
|
200 300 400 500 600 |
95 145 185 205 250 |
180 273 370 465 565 |
160 185 215 245 254 |
35 55 75 95 — |
13 17 17 21 21 |
6 6 6 8 8 |
studfile.net
Тормозной момент это — Что такое «тормозящий момент»? — 2 ответа
тормозящий момент при вращении
Автор RoxT задал вопрос в разделе Естественные науки
Что такое «тормозящий момент»? и получил лучший ответ
Ответ от Коротеев Александр[гуру]
А это то же самое, что сила трения, только для вращения.
Для поступательного движения скорость v, а для вращательного — угловая скорость w.
Для поступательного масса m, для вращательного — момент инерции I.
Для поступательного сила F, для вращательного — момент силы M.
Для поступательного импульс p, для вращательного — момент импульса L
(всё, кроме массы и момента инерции — векторы)
И всё по аналогии:
L = I*w
M = dL/dt = I*dw/dt (когда I постоянно)
И вообще для точки, на расстоянии r от оси вращения:
M = [r, F];
L = [r, p];
А в задаче требуется составить дифференциальное уравнение и проинтегрировать его.
Вычислить I как момент инерции диска (надо только определиться с осью)
И в скалярной форме
M = I*dw/dt
Разделить переменные:
M*dt = I*dw
М, надо полагать, считать постоянным.
Это можно интегрировать определённым интегралом.
Слева интеграл от 0 (начальный момент времени) до T — того самого «некоторого» времени.
А справа — интеграл от w0 — начальной угловой скорости до 0.
Выражаем М через всё остальное.
Интеграл, конечно, в данной задаче брался просто. И можно даже было записать
M = I * delta w / delta T, где
delta w — общее изменение угловой скорости,
delta t — общее прошедшее время.
Но если бы что-то ещё от чего-то зависело. Например M от t или от w — пришлось бы вычислять интеграл от этой функции.
>^.^<
Ответ от 2 ответа[гуру]
Привет! Вот подборка тем с ответами на Ваш вопрос: Что такое «тормозящий момент»?
Ответ от Alastor[гуру]
тормозящая сила знаете что такое?
а момент это аналог силы при вращательном движении
Ответ от Пользователь удален[гуру]
Момент силы — произведение силы на плечо.
В данном случае тормозящий момент — произведение силы трения (торможения) на радиус диска (M=Fr).
При этом (тормозящий) момент равен произведению момента инерции на угловое ускорение (торможения) : M=Ie, где I=mr²/2 — момент инерции диска.
Угловое ускорение — изменение угловой скорости за время (в данном случае от скорости вращения до 0 за время торможения).
Ответ от 2 ответа[гуру]
Привет! Вот еще темы с похожими вопросами:
Момент силы на Википедии
Посмотрите статью на википедии про Момент силы
Ответить на вопрос:
2oa.ru
Тормозной момент — тормоз — Большая Энциклопедия Нефти и Газа, статья, страница 2
Тормозной момент — тормоз
Cтраница 2
В уравнении Ме силы трения не учитываем, так как они будут тормозить совместно с тормозом и будут создавать запас тормозного момента тормоза. При червячном редукторе Динамические моменты на вал червяка отражаются мало, так как величина tgA, — / или отрацительна, или очень мала, поэтому при умножении на нее даже большой момент получится малой величины.
[16]
На другом конце шпильки 1 установлены гайка и контргайка, с помощью которых регулируют усилие замыкающей пружины, а следовательно, и тормозной момент тормоза.
[17]
Основным параметром тормоза является гарантированно развиваемый им тормозной момент. Тормозной момент тормоза определяется усилием на измерительном рычаге, при котором начинается проскальзывание шкива или дисков тормоза.
[19]
Возникающий при этом реактивный момент передается через раму, на которой подвешены двигатель 1 и редуктор 2 к рычагам спускного тормоза. При этом тормозной момент тормоза уменьшается, что позволяет шкиву быстрее вращаться.
[20]
На вертолетах обычно применяются механические тормоза ввиду надежности управления ими и возможности длительного стояночного торможения. Для уменьшения потребного тормозного момента тормоза устанавливают на многооборотных валах, передающих сравнительно небольшой крутящий момент.
[21]
Ттр, необходимо отказаться от данных вариантов блок-схемы привода. При этом тормоз может входить в состав блок-привода ( рис. 2.17, а) и тогда надо проверить тормозной момент тормоза. Если же тормоз с горизонтальным расположением колодок не унифицирован ( рис. 2.17), его на / до конструировать и рассчитывать как новую сборочную единицу.
[22]
Время втягивания электромагнитов с катушками последовательного возбуждения соответствует времени втягивания с форсировкой. Технические данные катушек последовательного возбуждения к электромагнитам тормозов серии ТКП приведены в табл. 2.6, тяговые усилия и максимальные значения хода якоря для магнитов серий ТКП — в табл. 2.7. Значения тормозных моментов тормозов с катушками ТКП указаны в гл.
[23]
Данное значение времени очень велико. Желательно, чтобы — время торможения тележки не превышало времени разгона. Если принять — 5с, то необходимо увеличить тормозной момент тормоза. Тормоз ТКГ-160 необходимо отрегулировать на данный тормозной момент.
[24]
При этом крюк опускается примерно с той же скоростью, что и крюк с полной нагрузкой. При опускании груза с повышенной скоростью главный двигатель 7 не работает и стопорный тормоз 6 главного двигателя замкнут. В начале разгона на спуск вспомогательный двигатель 1 развивает значительный крутящий момент, так как он должен преодолеть тормозной момент замкнутого спускного тормоза ( конструкция которого аналогична конструкции, представленной на фиг. Так как статор двигателя 1 подвешен на подшипниках, то его реактивный момент, воздействуя через систему рычагов на тормоз, производит размыкание тормоза. Чем более нагружен вспомогательный двигатель, тем больше его реактивный момент и тем сильнее он размыкает тормоз, уменьшая его тормозной момент, вследствие чего увеличивается скорость опускающегося груза. По мере увеличения скорости спуска нагрузка на вспомогательный двигатель уменьшается, а следовательно, уменьшается и его реактивный момент. Поэтому пружина / / тормоза создает подтормаживание тормозного шкива 3 и вызывает уменьшение скорости спуска. Таким образом, действие данного механизма аналогично действию механизма по фиг. Однако возможности данной схемы привода значительно шире. В нем можно осуществить подъем пустого крюка и мелких грузов с повышенной скоростью при включении вспомогательного двигателя на подъем. При этом спускной тормоз 2 должен быть разомкнут с помощью специального электромагнита 8 ( фиг. При включении вспомогательного двигателя на подъем повороту его статора препятствует упор 10 на станине тормоза. Чтобы вспомогательный двигатель 1 и электромагнит 8 могли работать независимо друг от друга, в элементах 9 рычажной системы, идущей к магниту, предусмотрены овальные отверстия. Ввиду малой мощности вспомогательного двигателя он может поднимать с увеличенной скоростью только весьма малые грузы. Для исключения перегрузки вспомогательного двигателя должны быть предусмотрены специальные устройства, выключающие ток при подъеме этим двигателем грузов, слишком тяжелых для него.
[25]
При повороте тормозной рукоятки направо золотник 3 передвигается влево и подключает тормозной цилиндр 2 к впускному патрубку трубопровода. При этом рычаг 5 поворачивается по часовой стрелке, передвигает золотник 3 вправо и перекрывает впускной патрубок. С изменением положения рычага 4 изменяется ход золотника и соответственно количество воздуха поступившего в тормозной цилиндр, а следовательно, положение поршня, связанного с тормозным рычагом, и величина тормозного момента тормоза.
[26]
В этом механизме вспомогательный двигатель 1 укреплен на корпусе редуктора 2, подвешенного на подшипниках и соединенного системой рычагов 4 с рычажной системой тормоза. Во время скоростного опускания груза вспомогательный двигатель помогает грузу поворачивать шкив 3 спускного тормоза. Возникающий при этом реактивный момент передается через раму, на которой подвешены двигатель 1 и редуктор 2 к рычагам спускного тормоза. При этом тормозной момент тормоза уменьшается, что позволяет шкиву быстрее вращаться.
[28]
В механизмах передвижения, оборудованных автоматическим стопорным тормозом, допускается установка дополнительного привода для обеспечения плавного торможения. При отключении электродвигателя аппаратами управления тормоз автоматически может не замыкаться. Для обеспечения нормальной работы всех элементов механизма передвижения замедление при торможении должно быть одинаковым для данного типа кранов, независимо от их номинальной грузоподъемности. При определении тормозного момента тормоза ( и пускового момента двигателя) механизма передвижения следует обеспечить устранение скольжения ( юза) ходовых колес по рельсу в периоды торможения.
[29]
Механизм 2 подъема стрелы также включается кулачковой муфтой и получает вращение от верхней шестерни нижнего вала 20 механизма поворота. Вращение на барабан подъема стрелы передается червячным винтом, на одном конце которого посажена шестерня и муфта включения, а на другом — постоянно замкнутый ленточный тормоз. От червячного винта через червячное колесо вращение передается на барабан. При опускании или подъеме стрелы тормозной момент тормоза преодолевается двигателем.
[30]
Страницы:
1
2
3
www.ngpedia.ru
момент торможения — это… Что такое момент торможения?
- момент торможения
-
Oil: braking moment
Универсальный русско-английский словарь.
Академик.ру.
2011.
- момент тока
- момент трения
Смотреть что такое «момент торможения» в других словарях:
-
момент торможения — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Momentas, susidaręs sąveikaujant pastoviam nuolatinio magneto laukui su srovėmis, kurias jis indukuoja sumuojamojo matuoklio rotoriuje, kurio sukimuisi jis… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
момент торможения — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Stabdymo jėgos momentas. atitikmenys: angl. braking torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. couple de… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
момент торможения — stabdymo momentas statusas T sritis fizika atitikmenys: angl. braking moment; braking torque; retarding torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. moment de freinage, m … Fizikos terminų žodynas
-
тормозной момент — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Momentas, susidaręs sąveikaujant pastoviam nuolatinio magneto laukui su srovėmis, kurias jis indukuoja sumuojamojo matuoklio rotoriuje, kurio sukimuisi jis… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
тормозящий момент — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Momentas, susidaręs sąveikaujant pastoviam nuolatinio magneto laukui su srovėmis, kurias jis indukuoja sumuojamojo matuoklio rotoriuje, kurio sukimuisi jis… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
тормозной момент — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Stabdymo jėgos momentas. atitikmenys: angl. braking torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. couple de… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
тормозящий момент — stabdomasis momentas statusas T sritis Standartizacija ir metrologija apibrėžtis Stabdymo jėgos momentas. atitikmenys: angl. braking torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. couple de… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
-
тормозной момент — stabdymo momentas statusas T sritis fizika atitikmenys: angl. braking moment; braking torque; retarding torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. moment de freinage, m … Fizikos terminų žodynas
-
тормозящий момент — stabdymo momentas statusas T sritis fizika atitikmenys: angl. braking moment; braking torque; retarding torque vok. Bremsmoment, n rus. момент торможения, m; тормозной момент, m; тормозящий момент, m pranc. moment de freinage, m … Fizikos terminų žodynas
-
ГОСТ Р 41.13-H-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 H 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1 антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения автоматически … Словарь-справочник терминов нормативно-технической документации
-
ГОСТ Р 41.13-99: Единообразные предписания, касающиеся официального утверждения транспортных средств категорий M, N и O в отношении торможения — Терминология ГОСТ Р 41.13 99: Единообразные предписания, касающиеся официального утверждения транспортных средств категорий M, N и O в отношении торможения оригинал документа: 2.11 автоматическое торможение: Торможение одного из нескольких… … Словарь-справочник терминов нормативно-технической документации
universal_ru_en.academic.ru
Величина — тормозной момент — Большая Энциклопедия Нефти и Газа, статья, страница 1
Величина — тормозной момент
Cтраница 1
Величина тормозного момента, развиваемого тормозом, зависит от магнитных сил сцепления между частицами и пропорциональна магнитному потоку, который, в свою очередь, определяется величиной тока в обмотке катушки возбуждения тормоза. Таким образом, слой из ферромагнитного порошка представляет собой пластичное тело с управляемой прочностью на сдвиг при помощи магнитного воздействия.
[2]
Величины тормозных моментов при параллельном включении электромагнитов обеспечиваются при напряжении тока не менее 85 % номинальной величины.
[3]
Величина тормозного момента зависит от тока, протекающего в якоре генератора, и поэтому чем больший ток потребляется приемником электроэнергии, тем больше тормозной момент генератора и тем труднее вращать его якорь.
[5]
Величина тормозного момента определяется величиной тока в якоре. Однако в начальный момент торможения ток в якоре мал и тормозной момент также незначителен. По мере самовозбуждения машины ток увеличивается, а значит растет и тормозной момент. Величина тормозного момента зависит от величины тормозного сопротивления. Если тормозное сопротивление велико, то тормозной момент будет мал. От величины тормозного сопротивления зависит и время торможения.
[6]
Величина тормозного момента, развиваемого тормозом, должна обеспечивать торможение с определенным коэффициентом запаса торможения. Коэффициентом запаса торможения называется отношение момента, создаваемого тормозом, к статическому крутящему моменту на тормозном валу, определяемому с учетом потерь.
[7]
Величины тормозных моментов, указанные в табл. 6 — 1, обеспечиваются при напряжении тока не менее 85 % номинальной величины.
[8]
Величина тормозного момента зависит от места установки тормоза в машине. Наименьшее его значение получается при установке тормоза на быстроходном валу.
[9]
Величина тормозного момента пропорциональна произведению магнитного потока Ф постоянного магнита на величину индуктируемого им тока / в в диске.
[10]
Величина тормозного момента зависит от намагничивающей силы обмоток статора, величины активных сопротивлений в цепи ротора и его скорости. Для получения удовлетворительного торможения величина постоянного тока должна быть в 3 — 5 раз больше тока холостого хода асинхронного электродвигателя.
[11]
Величина тормозного момента зависит от места установки тормоза в машине.
[12]
Величина тормозного момента зависит от места установки тормоза в машине. Наименьшее его значение получается при установке тормоза на валу, вращающемся с наибольшей угловой скоростью.
[13]
Величина тормозного момента зависит от намагничивающей силы обмоток статора, величины активных сопротивлений в цепи ротора и его скорости. Для получения удовлетворительного торможения величина постоянного тока должна быть в 3 — 5 раз больше тока холостого хода асинхронного электродвигателя.
[14]
Величина тормозного момента Мт у тормозов с фиксированным и с плавающим кулаком одинакова как на переднем, так и на заднем ходу автомобиля.
[15]
Страницы:
1
2
3
4
www.ngpedia.ru
