Эта статья является переводом цикла из четырёх статей «Linear algebra for game developers», написанных David Rosen и посвящённых линейной алгебре и её применению в разработке игр. С оригинальными статьями можно ознакомиться тут: часть 1, часть 2, часть 3 и часть 4. Я не стал публиковать переводы отдельными топиками, а объединил все статьи в одну. Думаю, что так будет удобнее воспринимать материал и работать с ним. Итак приступим.
Зачем нам линейная алгебра?
Одним из направлений в линейной алгебре является изучение векторов. Если в вашей игре применяется позиционирование экранных кнопок, работа с камерой и её направлением, скоростями объектов, то вам придётся иметь дело с векторами. Чем лучше вы понимаете линейную алгебру, тем больший контроль вы получаете над поведением векторов и, следовательно, над вашей игрой.
Что такое вектор?
В играх вектора используются для хранения местоположений, направлений и скоростей. Ниже приведён пример двухмерного вектора:
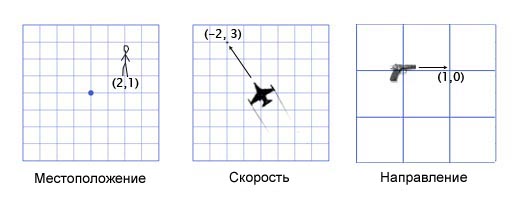
Вектор местоположения (также называемый «радиус-вектором») показывает, что человек стоит в двух метрах восточнее и в одном метре к северу от исходной точки. Вектор скорости показывает, что за единицу времени самолёт перемещается на три километра вверх и на два — влево. Вектор направления говорит нам о том, что пистолет направлен вправо.
Как вы можете заметить, вектор сам по себе всего лишь набор цифр, который обретает тот или иной смысл в зависимости от контекста. К примеру, вектор (1, 0) может быть как направлением для оружия, как показано на картинке, так и координатами строения в одну милю к востоку от вашей текущей позиции. Или скоростью улитки, которая двигается вправо со скоростью в 1 милю в час (прим. переводчика: довольно быстро для улитки, 44 сантиметра в секунду).
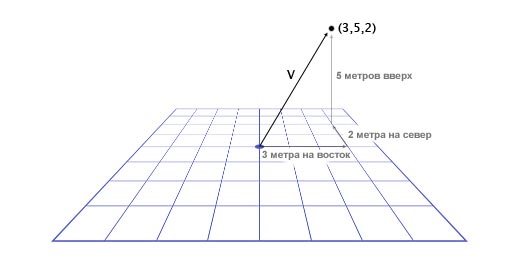
Важно отслеживать единицы измерения. Допустим у нас есть вектор V (3,5,2). Это мало что говорит нам. Три чего, пять чего? В нашей игре Overgrowth расстояния указываются в метрах, а скорости в метрах в секунду. Первое число в этом векторе — это направление на восток, второе — направление вверх, третье — направление на север. Отрицательные числа обозначают противоположные направления, на запад, вниз и на юг. Местоположение, определяемое вектором V (3,5,2), находится в трёх метрах к востоку, в пяти метрах вверху и в двух метрах к северу, как показано на картинке ниже.
Итак, мы изучили основы работы с векторами. Теперь узнаем как вектора использовать.
Сложение векторов
Чтобы сложить вектора, нам надо просто сложить каждую их составляющую друг с другом. Например:
(0, 1, 4) + (3, -2, 5) = (0+3, 1-2, 4+5) = (3, -1, 9)
Зачем нам нужно складывать вектора? Наиболее часто сложение векторов в играх применяется для физического интегрирования. Любой физический объект будет иметь вектора для местоположения, скорости и ускорения. Для каждого кадра (обычно это одна шестидесятая часть секунды), мы должны интегрировать два вектора: добавить скорость к местоположению и ускорение к скорости.
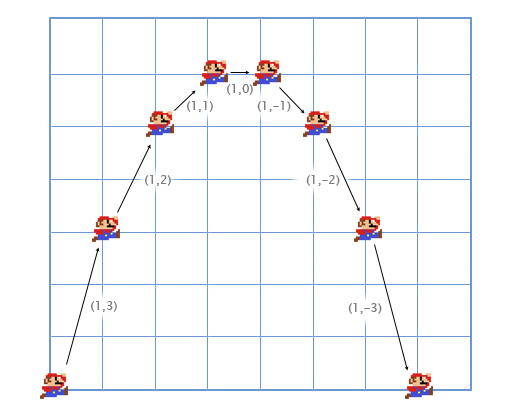
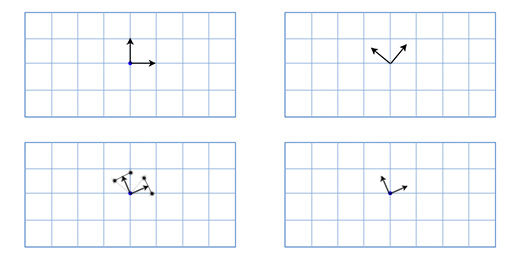
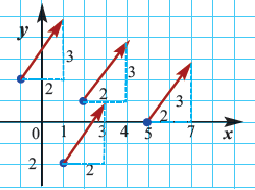
Давайте рассмотрим пример с прыжками Марио. Он начинает с позиции (0, 0). В момент начала прыжка его скорость (1, 3), он быстро двигается вверх и вправо. Его ускорение равно (0, -1), так как гравитация тянет его вниз. На картинке показано, как выглядит его прыжок, разбитый на семь кадров. Чёрным текстом показана его скорость в каждом фрейме.
Давайте рассмотрим первые кадры поподробнее, чтобы понять как всё происходит.
Для первого кадра, мы добавляем скорость Марио (1, 3) к его местоположению (0, 0) и получаем его новые координаты (1, 3). Затем мы складываем ускорение (0, -1) с его скоростью (1, 3) и получаем новое значение скорости Марио (1, 2).
Делаем то-же самое для второго кадра. Добавляем скорость (1, 2) к местоположению (1, 3) и получаем координаты (2, 5). Затем добавляем ускорение (0, -1) к его скорости (1, 2) и получаем новую скорость (1, 1).
Обычно игрок контролирует ускорение игрового персонажа с помощью клавиатуры или геймпада, а игра, в свою очередь, рассчитывает новые значения для скоростей и местоположения, используя физическое сложение (через сложение векторов). Это та-же задача, которая решается в интегральном исчислении, просто мы его сильно упрощаем для нашей игры. Я заметил, что мне намного проще внимательно слушать лекции по интегральному исчислению, думая о практическом его применении, которое мы только что описали.
Вычитание векторов
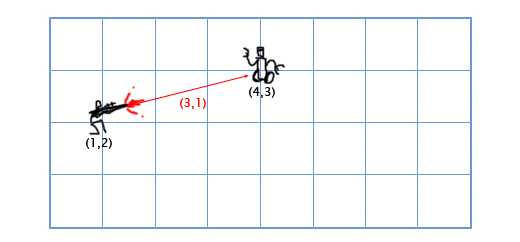
Вычитание рассчитывается по тому-же принципу что и сложение — вычитаем соответствующие компоненты векторов. Вычитание векторов удобно для получения вектора, который показывает из одного местоположения на другое. Например, пусть игрок находится по координатам (1, 2) с лазерным ружьём, а вражеский робот находится по координатам (4, 3). Чтобы определить вектор движения лазерного луча, который поразит робота, нам надо вычесть местоположение игрока из местоположения робота. Получаем:
(4, 3) — (1, 2) = (4-1, 3-2) = (3, 1).
Умножение вектора на скаляр
Когда мы говорим о векторах, мы называем отдельные числа скалярами. Например (3, 4) — вектор, а 5 — это скаляр. В играх, часто бывает нужно умножить вектор на число (скаляр). Например, моделируя простое сопротивление воздуха путём умножения скорости игрока на 0.9 в каждом кадре. Чтобы сделать это, нам надо умножить каждый компонент вектора на скаляр. Если скорость игрока (10, 20), то новая скорость будет:
0.9*(10, 20) = (0.9 * 10, 0.9 * 20) = (9, 18).
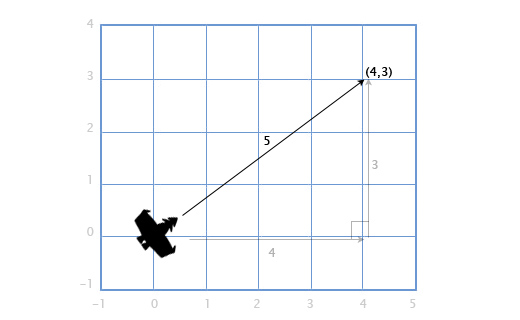
Длина вектора
Если у нас есть корабль с вектором скорости V (4, 3), нам также понадобится узнать как быстро он двигается, чтобы посчитать потребность в экранном пространстве или сколько потребуется топлива. Чтобы сделать это, нам понадобится найти длину (модуль) вектора V. Длина вектора обозначается вертикальными линиями, в нашем случае длина вектора V будет обозначаться как |V|.
Мы можем представить V как прямоугольный треугольник со сторонами 4 и 3 и, применяя теорему Пифагора, получить гипотенузу из выражения: x2 + y2 = h2
В нашем случае — длину вектора H с компонентами (x, y) мы получаем из квадратного корня: sqrt(x2 + y2).
Итак, скорость нашего корабля равна:
|V| = sqrt(42 + 32) = sqrt(25) = 5
Этот подход используется и для трёхмерных векторов. Длина вектора с компонентами (x, y, z) рассчитывается как sqrt(x2 + y2 + z2)
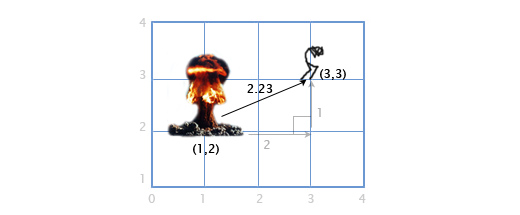
Расстояние
Если игрок P находится в точке (3, 3), а взрыв произошёл в точке E по координатам (1, 2), нам надо определить расстояние между игроком и взрывом, чтобы рассчитать степень ущерба, нанесённого игроку. Это легко сделать, комбинируя две вышеописанных операции: вычитание векторов и их длину.
Мы вычитаем P — E, чтобы получить вектор между ними. А затем определяем длину этого вектора, что и даёт нам искомое расстояние. Порядок следования операндов тут не имеет значения, |E — P| даст тот-же самый результат.
Расстояние = |P — E| = |(3, 3) — (1, 2)| = |(2, 1)| = sqrt(22+12) = sqrt(5) = 2.23
Нормализация
Когда мы имеем дело с направлениями (в отличие от местоположений и скоростей), важно, чтобы вектор направления имел длину, равную единице. Это сильно упрощает нам жизнь. Например, допустим орудие развёрнуто в направлении (1, 0) и выстреливает снаряд со скоростью 20 метров в секунду. Каков в данном случае вектор скорости для выпущенного снаряда?
Так как вектор направления имеет длину равную единице, мы умножаем направление на скорость снаряда и получаем вектор скорости (20, 0). Если-же вектор направления имеет отличную от единицы длину, мы не сможем сделать этого. Снаряд будет либо слишком быстрым, либо слишком медленным.
Вектор с длиной равной единице называется «нормализованным». Как сделать вектор нормализованным? Довольно просто. Мы делим каждый компонент вектора на его длину. Если, к примеру, мы хотим нормализовать вектор V с компонентами (3, 4), мы просто делим каждый компонент на его длину, то есть на 5, и получаем (3/5, 4/5). Теперь, с помощью теоремы Пифагора, мы убедимся в том, что его длина равна единице:
(3/5)2 + (4/5)2 = 9/25 + 16/25 = 25/25 = 1
Скалярное произведение векторов
Что такое скалярное произведение (записывается как •)? Чтобы рассчитать скалярное произведение двух векторов, мы должны умножить их компоненты, а затем сложить полученные результаты вместе
(a1, a2) • (b1, b2) = a1b1 + a2b2
Например: (3, 2) • (1, 4) = 3*1 + 2*4 = 11. На первый взгляд это кажется бесполезным, но посмотрим внимательнее на это:
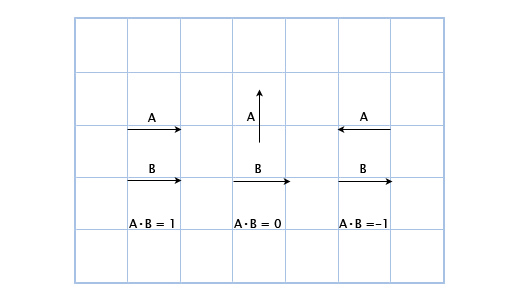
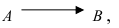
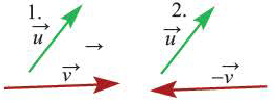
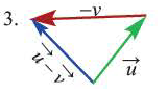
Здесь мы можем увидеть, что если вектора указывают в одном направлении, то их скалярное произведение больше нуля. Когда они перпендикулярны друг другу, то скалярное произведение равно нулю. И когда они указывают в противоположных направлениях, их скалярное произведение меньше нуля.
В основном, с помощью скалярного произведения векторов можно рассчитать, сколько их указывает в одном направлении. И хоть это лишь малая часть возможностей скалярного произведения, но уже очень для нас полезная.
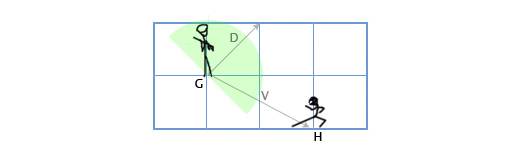
Допустим у нас есть стражник, расположенный в G(1, 3) смотрящий в направлении D(1,1), с углом обзора 180 градусов. Главный герой игры подсматривает за ним с позиции H(3, 2). Как определить, находится-ли главный герой в поле зрения стражника или нет? Сделаем это путём скалярного произведения векторов D и V (вектора, направленного от стражника к главному герою). Мы получим следующее:
V = H — G = (3, 2) — (1, 3) = (3-1, 2-3) = (2, -1)
D•V = (1, 1) • (2, -1) = 1*2 + 1*-1 = 2-1 = 1
Так как единица больше нуля, то главный герой находится в поле зрения стражника.
Мы уже знаем, что скалярное произведение имеет отношение к определению направления векторов. А каково его более точное определение? Математическое выражение скалярного произведения векторов выглядит так:
A•B = |A||B|cosΘ
Где Θ (произносится как «theta») — угол между векторами A и B.
Это позволяет нам найти Θ (угол) с помощью выражения:
Θ = acos([AB] / [|A||B|])
Как я говорил ранее, нормализация векторов упрощает нашу жизнь. И если A и B нормализованы, то выражение упрощается следующим образом:
Θ = acos(AB)
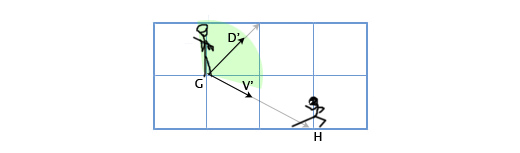
Давайте опять рассмотрим сценарий со стражником. Пусть теперь угол обзора стражника будет равен 120 градусам. Получим нормализованные вектора для направления взгляда стражника (D’) и для направления от стражника к главному герою (V’). Затем определим угол между ними. Если угол более 60 градусов (половина от угла обзора), то главный герой находится вне поля зрения стражника.
D’ = D / |D| = (1, 1) / sqrt(12 + 12) = (1, 1) / sqrt(2) = (0.71, 0.71)
V’ = V / |V| = (2, -1) / sqrt(22 + (-1)2) = (2,-1) / sqrt(5) = (0.89, -0.45)
Θ = acos(D’V’) = acos(0.71*0.89 + 0.71*(-0.45)) = acos(0.31) = 72
Угол между центром поля зрения стражника и местоположением главного героя составляет 72 градуса, следовательно стражник его не видит.
Понимаю, что это выглядит довольно сложно, но это потому, что мы всё делаем вручную. В программе это всё довольно просто. Ниже показано как я сделал это в нашей игре Overgrowth с помощью написанных мной С++ библиотек для работы с векторами:
//Инициализируем вектора
vec2 guard_pos = vec2(1,3);
vec2 guard_facing = vec2(1,1);
vec2 hero_pos = vec2(3,2);
//Рассчитываем нормализованные вектора
vec2 guard_facing_n = normalize(guard_facing);
vec2 guard_to_hero = normalize(hero_pos - guard_pos);
//Рассчитываем угол
float angle = acos(dot(guard_facing_n, guard_to_hero));
Векторное произведение
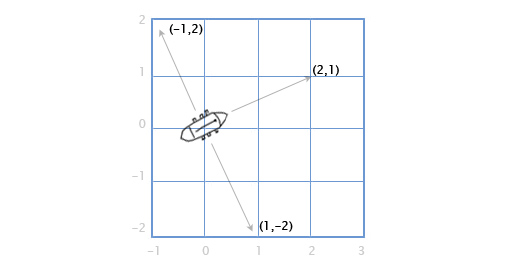
Допустим у нас есть корабль с пушками, которые стреляют в правую и в левую стороны по курсу. Допустим, что лодка расположена вдоль вектора направления (2, 1). В каких направлениях теперь стреляют пушки?
Это довольно просто в двухмерной графике. Чтобы повернуть направление на 90 градусов по часовой стрелке, достаточно поменять местами компоненты вектора, а затем поменять знак второму компоненту.
(a, b) превращается в (b, -a). Следовательно у корабля, расположенного вдоль вектора (2, 1), пушки справа по борту будут стрелять в направлении (1, -2), а пушки с левого борта, будут стрелять в противоположном направлении. Меняем знаки у компонент вектора и получаем (-1, 2).
А что если мы хотим рассчитать это всё для трехмерной графики? Рассмотрим пример с кораблём.
У нас есть вектор мачты M, направленной прямо вверх (0, 1, 0) и направление ветра: север-северо-восток W (1, 0, 2). И мы хотим вычислить вектор направления паруса S, чтобы наилучшим образом «поймать ветер».
Для решения этой задачи мы используем векторное произведение: S = M x W.

Векторное произведение A(a1,a2,a3) и B(b1,b2,b3) будет равно:
(a2b3-a3b2, a3b1-a1b3, a1b2-a2b1)
Подставим теперь нужные нам значения:
S = MxW = (0, 1, 0) x (1, 0, 2) = ([1*2 — 0*0], [0*1 — 0*2], [0*0 — 1*1]) = (2, 0, -1)
Для расчётов вручную довольно сложно, но для графических и игровых приложений я рекомендую написать функцию, подобную той, что указана ниже и не вдаваться более в детали подобных расчётов.
vec3 cross(vec3 a, vec3 b) {
vec3 result;
result[0] = a[1] * b[2] - a[2] * b[1];
result[1] = a[2] * b[0] - a[0] * b[2];
result[2] = a[0] * b[1] - a[1] * b[0];
return result;
}
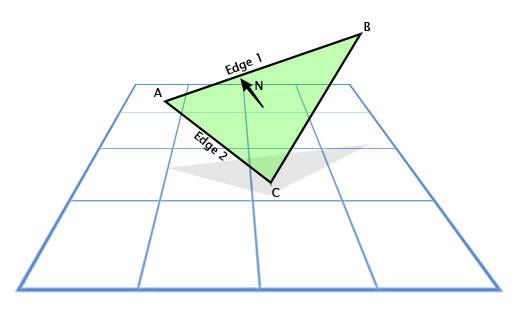
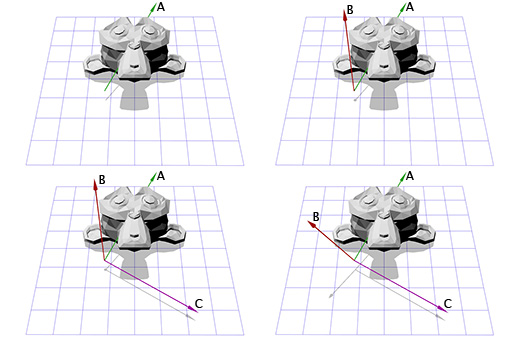
Векторное произведение часто используется в играх, чтобы рассчитать нормали к поверхностям. Направления, в которых «смотрит» та или иная поверхность. Например, рассмотрим треугольник с векторами вершин A, B и С. Как мы найдем направление в котором «смотрит» треугольник, то есть направление перпендикулярное его плоскости? Это кажется сложным, но у нас есть инструмент для решения этой задачи.
Используем вычитание, для определения направления из A в С (C — A), пусть это будет «грань 1» (Edge 1) и направление из A в B (B — A), пусть это будет «грань 2» (Edge 2). А затем применим векторное произведение, чтобы найти вектор, перпендикулярный им обоим, то есть перпендикулярный плоскости треугольника, также называемый «нормалью к плоскости».
Вот так это выглядит в коде:
vec3 GetTriangleNormal(vec3 a, vec3 b, vec3 c) {
vec3 edge1 = b-a;
vec3 edge2 = c-a;
vec3 normal = cross(edge1,edge2);
return normal;
}
В играх основное выражение освещённости записывается как N • L, где N — это нормаль к освещаемой поверхности, а L — это нормализованный вектор направления света. В результате поверхность выглядит яркой, когда на неё прямо падает свет, и тёмной, когда этого не происходит.
Теперь перейдем к рассмотрению такого важного для разработчиков игр понятия, как «матрица преобразований» (transformation matrix).
Для начала изучим «строительные блоки» матрицы преобразований.
Базисный вектор
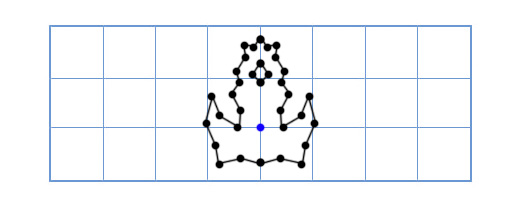
Допустим мы пишем игру Asteroids на очень старом «железе» и нам нужен простой двухмерный космический корабль, который может свободно вращаться в своей плоскости. Модель корабля выглядит так:
Как нам рисовать корабль, когда игрок поворачивает его на произвольный градус, скажем 49 градусов против часовой стрелки. Используя тригонометрию, мы можем написать функцию двухмерного поворота, которая принимает координаты точки и угол поворота, и возвращает координаты смещённой точки:
vec2 rotate(vec2 point, float angle){
vec2 rotated_point;
rotated_point.x = point.x * cos(angle) - point.y * sin(angle);
rotated_point.y = point.x * sin(angle) + point.y * cos(angle);
return rotated_point;
}
Применяя эту функцию ко всем трём точкам, мы получим следующую картину:

Операции с синусами и косинусами работают довольно медленно, но так как мы делаем расчёты лишь для трёх точек, это будет нормально работать даже на старом «железе» (прим. переводчика: в случаях, когда предполагается интенсивное использование тригонометрических функций, для ускорения вычислений, в памяти организуют таблицы значений для каждой функции и рассчитывают их во время запуска приложения. Затем при вычислении той или иной тригонометрической функции просто производится обращение к таблице).
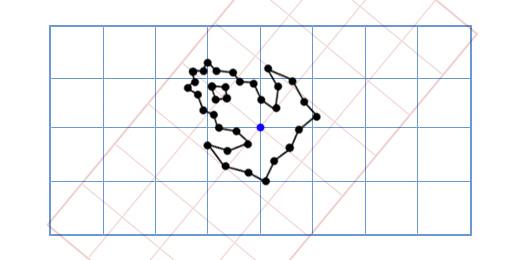
Пусть теперь наш корабль выглядит вот так:
Теперь старый подход будет слишком медленным, так как надо будет поворачивать довольно большое количество точек. Одно из элегантных решений данной проблемы будет звучать так — «Что если вместо поворота каждой точки модели корабля, мы повернём координатную решётку нашей модели?»
Как это работает? Давайте посмотрим внимательнее, что собой представляют координаты.
Когда мы говорим о точке с координатами (3, 2), мы говорим, что её местоположение находится в трех шагах от точки отсчёта по координатной оси X, и двух шагах от точки отсчёта по координатной оси Y.
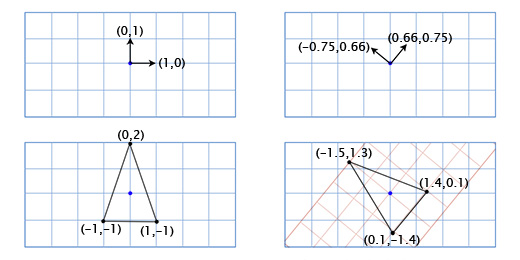
По-умолчанию координатные оси расположены так: вектор координатной оси X (1, 0), вектор координатной оси Y (0, 1). И мы получим расположение: 3(1, 0) + 2(0, 1). Но координатные оси не обязательно должны быть в таком положении. Если мы повернём координатные оси, в это-же время мы повернём все точки в координатной решётке.
Чтобы получить повернутые оси X и Y мы применим тригонометрические функции, о которых говорили выше. Если мы поворачиваем на 49 градусов, то новая координатная ось X будет получена путём поворота вектора (0, 1) на 49 градусов, а новая координатная ось Y будет получена путём поворота вектора (0, 1) на 49 градусов. Итак вектор новой оси X у нас будет равен (0.66, 0.75), а вектор новой оси Y будет (-0.75, 0.66). Сделаем это вручную для нашей простой модели из трёх точек, чтобы убедиться, что это работает так, как нужно:
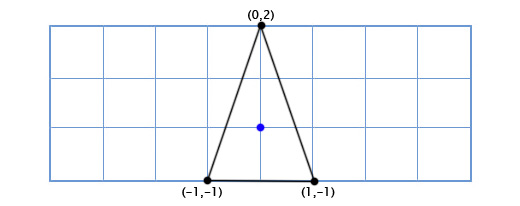
Координаты верхней точки (0, 2), что означает, что её новое местоположение находится в 0 на новой (повёрнутой) оси X и 2 на новой оси Y:
0*(0.66,0.75) + 2*(-0.75, 0.66) = (-1.5, 1.3)
Нижняя левая точка (-1, -1), что означает, что её новое местоположение находится в -1 на повернутой оси X, и -1 на повернутой оси Y:
-1*(0.66,0.75) + -1*(-0.75, 0.66) = (0.1, -1.4)
Нижняя правая точка (1, -1), что означает её новое местоположение находится в 1 на повернутой оси X, и -1 на повернутой оси Y
1*(0.66,0.75) + -1*(-0.75, 0.66) = (1.4, 0.1)
Мы показали, как координаты корабля отображаются в другой координатной сетке с повернутыми осями (или «базисными векторами»). Это удобно в нашем случае, так как избавляет нас от необходимости применять тригонометрические преобразования к каждой из точек модели корабля.
Каждый раз, когда мы изменяем базисные вектора (1, 0) и (0, 1) на (a, b) и (c, d), то новая координата точки (x, y) может быть найдена с помощью выражения:
x(a,b) + y(c,d)
Обычно базисные вектора равны (1, 0) и (0, 1) и мы просто получаем x(1, 0) + y(0, 1) = (x, y), и нет необходимости заботиться об этом дальше. Однако, важно помнить, что мы можем использовать и другие базисные вектора, когда нам это нужно.
Матрицы
Матрицы похожи на двухмерные вектора. Например, типичная 2×2 матрица, может выглядеть так:
[a c
b d]
Когда вы умножаете матрицу на вектор, вы суммируете скалярное произведение каждой строки с вектором, на который происходит умножение. Например, если мы умножаем вышеприведённую матрицу на вектор (x, y), то мы получаем:
(a,c)•(x,y) + (b,d)•(x,y)
Будучи записанным по-другому, это выражение выглядит так:
x(a,b) + y(c,d)
Выглядит знакомо, не так-ли? Это в точности такое-же выражение, которые мы использовали для смены базисных векторов. Это означает, что умножая 2×2 матрицу на двухмерный вектор, мы тем самым меняем базисные вектора. Например, если мы вставим стандартные базисные вектора в (1, 0) и (0, 1) в колонки матрицы, то мы получим:
[1 0 0 1]
Это единичная матрица, которая не даёт эффекта, который мы можем ожидать от нейтральных базисных векторов, которые мы указали. Если-же мы повернём базисные вектора на 49-градусов, то мы получим:
[0.66 -0.75 0.75 0.66]
Эта матрица будет поворачивать двухмерный вектор на 49 градусов против часовой стрелки. Мы можем сделать код нашей игры Asteriods более элегантным, используя матрицы вроде этой. Например, функция поворота нашего корабля может выглядеть так:
void RotateShip(float degrees){
Matrix2x2 R = GetRotationMatrix(degrees);
for(int i=0; i<num_points; ++i){
rotated_point[i] = R * point[i];
}
}
Однако, наш код будет ещё более элегантным, если мы сможем также включить в эту матрицу перемещение корабля в пространстве. Тогда у нас будет единая структура данных, которая будет заключать в себе и применять информацию об ориентации объекта и его местоположении в пространстве.
К счастью есть способ добиться этого, хоть это и выглядит не очень элегантно. Если мы хотим переместиться с помощью вектора (e, f), мы лишь включаем его в нашу матрицу преобразования:
[a c e b d f 0 0 1]
И добавляем дополнительную единицу в конец каждого вектора, определяющего местоположение объекта, например так:
[x y 1]
Теперь, когда мы перемножаем их, мы получаем:
(a, c, e) • (x, y, 1) + (b, d, f) • (x, y, 1) + (0, 0, 1) • (x, y, 1)
Что, в свою очередь, может быть записано как:
x(a, b) + y(c, d) + (e, f)
Теперь у нас есть полный механизм трансформации, заключённый в одной матрице. Это важно, если не принимать в расчёт элегантность кода, так как с ней мы теперь можем использовать все стандартные манипуляции с матрицами. Например перемножить матрицы, чтобы добавить нужный эффект, или мы можем инвертировать матрицу, чтобы получить прямо противоположное положение объекта.
Трехмерные матрицы
Матрицы в трехмерном пространстве работают так-же как и в двухмерном. Я приводил примеры с двухмерными векторами и матрицами, так как их просто отобразить с помощью дисплея, показывающего двухмерную картинку. Нам просто надо определить три колонки для базисных векторов, вместо двух. Если базисные вектора это (a,b,c), (d,e,f) and (g,h,i) то наша матрица будет выглядеть так:
[a d g b e h c f i]
Если нам нужно перемещение (j,k,l), то мы добавляем дополнительную колонку и строку, как говорили раньше:
[a d g j b e h k c f i l 0 0 0 1]
И добавляем единицу [1] в вектор, как здесь:
[x y z 1]
Вращение в двухмерном пространстве
Так как в нашем случае у нас только одна ось вращения (расположенная на дисплее), единственное, что нам надо знать, это угол. Я говорил об этом ранее, упоминая, что мы можем применять тригонометрические функции для реализации функции двухмерного вращения наподобие этой:
vec2 rotate(vec2 point, float angle){
vec2 rotated_point;
rotated_point.x = point.x * cos(angle) - point.y * sin(angle);
rotated_point.y = point.x * sin(angle) + point.y * cos(angle);
return rotated_point;
}
Более элегантно это можно выразить в матричной форме. Чтобы определить матрицу, мы можем применить эту функцию к осям (1, 0) и (0, 1) для угла Θ, а затем включить полученные оси в колонки нашей матрицы. Итак, начнём с координатной оси X (1, 0). Если мы применим к ней нашу функцию, мы получим:
(1*cos(Θ) — 0*sin(Θ), 1*sin(Θ) + 0*cos(Θ)) = (cos(Θ), sin(Θ))
Затем, мы включаем координатную ось Y (0, 1). Получим:
(0*cos(Θ) — 1*sin(Θ), 0*sin(Θ) + 1*cos(Θ)) = (-sin(Θ), cos(Θ))
Включаем полученные координатные оси в матрицу, и получаем двухмерную матрицу вращения:
[cos(Θ) -sin(Θ) sin(Θ) cos(Θ)]
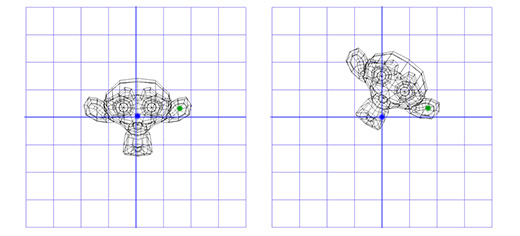
Применим эту матрицу к Сюзанне, мартышке из графического пакета Blender. Угол поворота Θ равен 45 градусов по часовой стрелке.
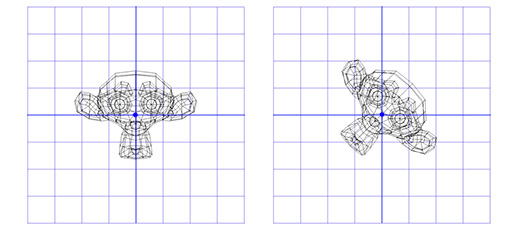
Как видите — это работает. Но что если нам надо осуществить вращение вокруг точки, отличной от (0, 0)?
Например, мы хотим вращать голову мартышки вокруг точки, расположенной в её ухе:
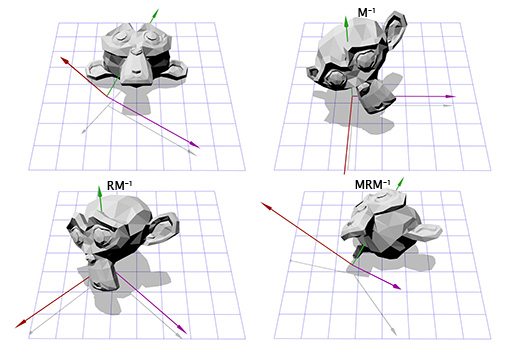
Чтобы сделать это, мы можем начать с создания матрицы перемещения (translation matrix) T, которая перемещает объект из начальной точки в точку вращения в ухе мартышки, и матрицу вращения R, для вращения объекта вокруг начальной точки. Теперь для вращения вокруг точки, расположенной в ухе, мы можем сперва переместить точку в ухе на место начальной точки, с помощью инвертирования матрицы T, записанной как T-1. Затем, мы вращаем объект вокруг начальной точки, с помощью матрицы R, а затем применяем матрицу T для перемещения точки вращения назад, к своему исходному положению.
Ниже дана иллюстрация к каждому из описанных шагов:
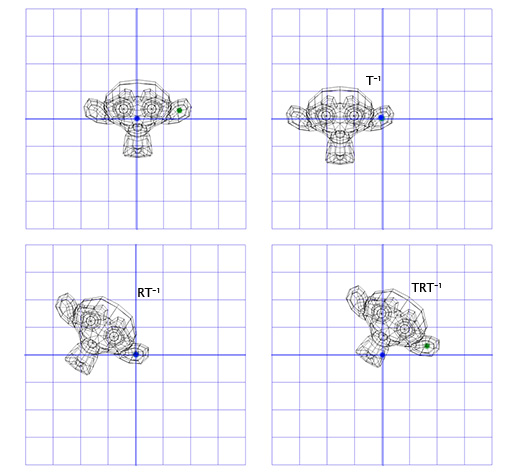
Это важный шаблон, который мы будем применять позднее — применение вращения для двух противоположных трансформаций позволяет нам вращать объект в другом «пространстве». Что очень удобно и полезно.
Теперь рассмотрим трёхмерное вращение.
Трёхмерное вращение
Вращение вокруг оси Z работает по тому-же принципу, что и вращение в двухмерном пространстве. Нам лишь нужно изменить нашу старую матрицу, добавив к ней дополнительную колонку и строку:
[cos(Θ) -sin(Θ) 0 sin(Θ) cos(Θ) 0 0 0 1]
Применим эту матрицу к трехмерной версии Сюзанны, мартышки из пакета Blender. Угол поворота Θ пусть будет равен 45 градусов по часовой стрелке.
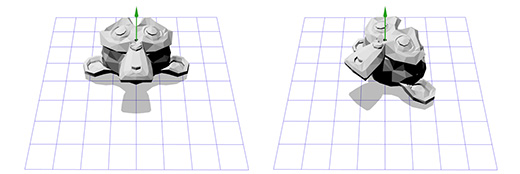
То-же самое. Вращение только вокруг оси Z ограничивает нас, как насчёт вращения вокруг произвольной оси?
Вращение, определяемое осью и углом (Axis-angle rotation)
Представление вращения, определяемого осью и углом, также известно как вращение в экспоненциальных координатах, параметризованное вращением двух величин. Вектора, определяющего вращение направляющей оси (прямая линия) и угла, описывающего величину поворота вокруг этой оси. Вращение осуществляется согласно правилу правой руки.
Итак, вращение задаётся двумя параметрами (axis, angle), где axis — вектор оси вращения, а angle — угол вращения. Этот приём довольно прост и являет собой отправную точку для множества других операций вращения, с которыми я работаю. Как практически применить вращение, определяемое осью и углом?
Допустим мы имеем дело с осью вращения, показанной на рисунке ниже:
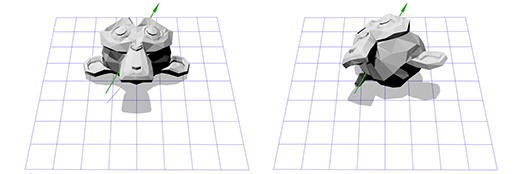
Мы знаем как вращать объект вокруг оси Z, и мы знаем как вращать объект в других пространствах. Итак, нам лишь надо создать пространство, где наша ось вращения будет являться осью Z. И если эта ось будет осью Z, то что будет являться осями X и Y? Займемся вычислениями сейчас.
Чтобы создать новые оси X и Y нам нужно лишь выбрать два вектора, которые перпендикулярны новой оси Z и перпендикулярны друг другу. Мы уже говорили ранее о векторном умножении, которое берёт два вектора и даёт в итоге перпендикулярный им вектор.
У нас есть один вектор сейчас, это ось вращения, назовём его A. Возьмём теперь случайный другой вектор B, который находится не в том-же направлении, что и вектор A. Пусть это будет (0, 0, 1) к примеру.
Теперь мы имеем ось вращения A и случайный вектор B, мы можем получить нормаль C, через векторное произведение A и B. С перпендикулярен векторам A и B. Теперь мы делаем вектор B перпендикулярным векторам A и C через их векторное произведение. И всё, у нас есть все нужные нам оси координат.
На словах это звучит сложно, но довольно просто выглядит в коде или будучи показанным в картинках.
Ниже показано, как это выглядит в коде:
B = (0,0,1);
C = cross(A,B);
B = cross(C,A);
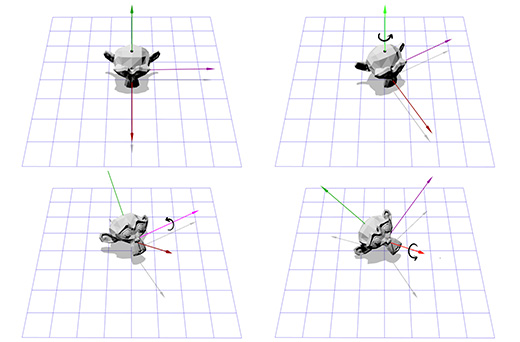
Тут показана иллюстрация для каждого шага:
Теперь, имея информацию о новых координатных осях, мы можем составить матрицу M, включив каждую ось как колонку в эту матрицу. Нам надо убедиться, что вектор A является третьей колонкой, чтобы он был нашей новой осью координат Z.
[B0 C0 A0 B1 C1 A1 B2 C2 A2]
Теперь это похоже на то, что мы делали для поворота в двухмерном пространстве. Мы можем применить инвертированную матрицу M, чтобы переместиться в новую систему координат, затем произвести вращение, согласно матрице R, чтобы повернуть объект вокруг оси Z, затем применить матрицу M, чтобы вернуться в исходное координатное пространство.
Теперь мы можем вращать объект вокруг произвольной оси. В конце концов мы можем просто создать матрицу T = T = M-1RM и использовать её много раз, без дополнительных усилий с нашей стороны. Есть более эффективные способы конвертирования вращений, определяемых осью и углом во вращения, определяемые матрицами. Просто описанный нами подход показывает многое из того, о чём мы говорили ранее.
Вращение, определяемое осью и углом, возможно, самый интуитивно понятный способ. Применяя его, очень легко инвертировать поворот, поменяв знак у угла, и легко интерполировать, путём интерполяции угла. Однако тут есть серьёзное ограничение, и заключается оно в том, что такое вращение не является суммирующим. То есть вы не можете комбинировать два вращения, определяемых осью и углом в третье.
Вращение, определяемое осью и углом — хороший способ для начала, но оно должно быть преобразовано во что-то другое, чтобы использоваться в более сложных случаях.
Эйлеровские углы
Эйлеровские углы представляют собой другой способ вращения, заключающийся в трёх вложенных вращениях относительно осей X, Y и Z. Вы, возможно, сталкивались с их применением в играх, где камера показывает действие от первого лица, либо от третьего лица.
Допустим вы играете в шутер от первого лица и вы повернулись на 30 градусов влево, а затем посмотрели на 40 градусов вверх. В конце-концов в вас стреляют, попадают, и, в результате удара, камера поворачивается вокруг своей оси на 45 градусов. Ниже показано вращение с помощью углов Эйлера (30, 40, 45).
Углы Эйлера — удобное и простое в управлении средство. Но у этого способа есть два недостатка.
Первый, это вероятность возникновения ситуации под названием «блокировка оси» или «шарнирный замок» (gimbal lock). Представьте, что вы играете в шутер от первого лица, где вы можете посмотреть влево, вправо, вверх и вниз или повернуть камеру вокруг зрительной оси. Теперь представьте, что вы смотрите прямо вверх. В этой ситуации попытка взглянуть налево или направо будет аналогична попытке вращения камеры. Всё что мы можем вы этом случае, это вращать камеру вокруг своей оси, либо посмотреть вниз. Как вы можете представить, это ограничение делает непрактичным применение углов Эйлера в лётных симуляторах.
Второе — интерполяция между двумя эйлеровскими углами вращения не даёт кратчайшего пути между ними.
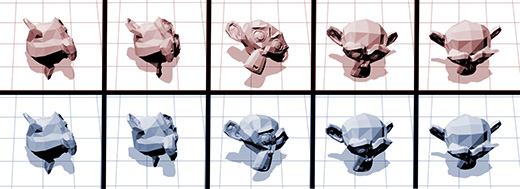
Например, у вас две интерполяции между двумя одинаковыми вращениями. Первая использует интерполяцию эйлеровского угла, вторая использует сферическую линейную интерполяцию (spherical linear interpolation (SLERP)), чтобы найти кратчайший путь.
Итак, что-же больше подойдет для интерполяции вращений? Может быть матрицы?
Вращение с помощью матриц
Как мы уже говорили ранее, матрицы вращения хранят в себе информацию о трёх осях. Это означает, что интерполяция между двумя матрицами лишь линейно интерполирует каждую ось. В результате это даёт нам эффективный путь, то так-же привносит новые проблемы. Например, тут показаны два вращения и одно интерполированное полу-вращение:
Как вы можете заметить, интерполированное вращение значительно меньше, чем любое из исходных вращений, и две оси более не перпендикулярны друг другу. Это логично, если вдуматься — середина отрезка, соединяющего любые две точки на сфере будет расположена ближе к центру сферы.
Это в свою очередь порождает известный «эффект фантика» (candy wrapper effect), при применении скелетной анимации. Ниже показана демонстрация этого эффекта на примере кролика из нашей игры Overgrowth (прим. переводчика: обратите внимание на середину туловища кролика).

Вращение, основанное на матричных операциях, очень полезно, так как они могут аккумулировать вращения без всяких проблем, вроде блокировки оси (gimbal lock), и может очень эффективно применяться к точкам сцены. Вот почему поддержка вращения на матрицах встроена в графические карты. Для любого типа трёхмерной графики матричный формат вращения — это всегда итоговый применяемый способ.
Однако, как мы уже знаем, матрицы не очень хорошо интерполируются, и они не столь интуитивно понятны.
Итак, остался только один главный формат вращения. Последний, но тем не менее, важный.
Кватернионы
Что-же такое кватернионы? Если очень кратко, то это альтернативный вариант вращения, основанный на оси и угле (axis-angle rotation), который существует в пространстве.
Подобно матрицам они могут аккумулировать вращения, то есть вы можете составлять из них цепочку вращений, без опаски получить блокировку оси (gimbal lock). И в то-же время, в отличие от матриц, они могут хорошо интерполироваться из одного положения в другое.
Являются-ли кватернионы лучшим решением, нежели остальные способы вращений (rotation formats)?
На сегодняшний день они комбинируют все сильные стороны других способов вращений. Но у них есть два слабых места, рассмотрев которые, мы придём к выводу, что кватернионы лучше использовать для промежуточных вращений. Итак, каковы недостатки кватернионов.
Во-первых кватернионы непросто отобразить на трёхмерном пространстве. И мы вынуждены всегда реализовывать вращение более простым способом, а затем конвертировать его. Во-вторых, кватернионы не могут эффективно вращать точки, и мы вынуждены конвертировать их в матрицы, чтобы повернуть значительное количество точек.
Это означает, что вы скорее всего не начнете или не закончите серию вращений с помощью кватернионов. Но с их помощью можно реализовать промежуточные вращения более эффективно, нежели при применении любого другого подхода.
«Внутренняя кухня» механизма кватернионов не очень понятна и не интересна мне. И, возможно, не будет интересна и вам, если только вы не математик. И я советую вам найти библиотеки, которые работают с кватернионами, чтобы облегчить вам решение ваших задач с их помощью.
Математические библиотеки «Bullet» или «Blender» будут хорошим вариантом для начала.
Содержание:
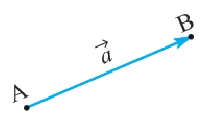
Определение: Вектором называется направленный отрезок прямой 
где А – начало, а В – конец вектора.
Замечание: Векторы в основном обозначают одной прописной буквой латинского алфавита со стрелочкой (или черточкой) наверху  .
.
Определение: Если начало и конец вектора  не закреплены, то он называется свободным.
не закреплены, то он называется свободным.
Замечание: Свободный вектор можно перемещать как вдоль его прямой, так и параллельно самому себе.
Определение: Если зафиксирована точка, которая определяет начало вектора, то она называется точкой приложения вектора.
Определение: Длиной (модулем) вектора а называется расстояние от его начала до его конца: 
Определение: Векторы называются коллинеарными (Рис. 1), если они лежат на одной прямой или в параллельных прямых.
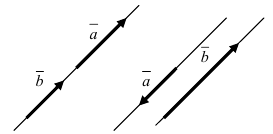
Рис.1. Коллинеарные векторы.
Определение: Векторы называются компланарными (Рис. 2), если они лежат в одной плоскости или параллельных плоскостях.
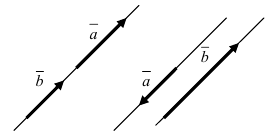
Рис.2. Компланарные векторы.
Определение: Два коллинеарных вектора  и
и  называются равными, если они со-направлены и имеют одинаковую длину.
называются равными, если они со-направлены и имеют одинаковую длину.
Определение вектора и основные свойства
Многие величины, например, масса, длина, время, температура и др. характеризуются только числовыми значениями. Такие величины называются скалярными величинами. Некоторые же величины, например, скорость, ускорение, сила и др. определяются как числовыми значениями, так и направлением. Такие величины называются векторными величинами. Перемещение – самый простой пример векторных величин. Перемещение тела из точки  в точку
в точку  изображается с помощью направленного от до
изображается с помощью направленного от до  отрезка – вектора. Вектор изображается с помощью направленного отрезка.
отрезка – вектора. Вектор изображается с помощью направленного отрезка.
Длина этого отрезка, называется длиной или модулем вектора. Вектор обозначается указанием начальной и конечной точки. Например, вектор  , здесь – начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор
, здесь – начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор  . Длину вектора
. Длину вектора  обозначают, как:
обозначают, как: 
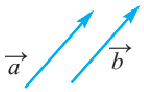
Два вектора называется равными, если они равны по модулю и одинаково направлены. На рисунке векторы  и
и  равны:
равны:  .
.
• Два вектора называются противоположными, если они равны по модулю и противоположно направлены.


Векторы  и
и  противоположны:
противоположны: 
Если начало и конец вектора совпадают, то такой вектор называется нулевым и обозначается  Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как
Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как  , а противоположно направленные
, а противоположно направленные  .
.
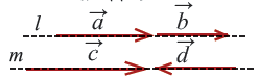
На рисунке векторы  -коллинеарные векторы. Здесь
-коллинеарные векторы. Здесь 
Выражения вектора компонентами в координатной плоскости
Рассмотрим вектор на координатной плоскости. Конечная точка  относительно начальной точки
относительно начальной точки  изменила свое положение вдоль оси
изменила свое положение вдоль оси  на
на  (при
(при  направо, при
направо, при  налево), вдоль оси
налево), вдоль оси  на
на  (при
(при  вверх, при
вверх, при  вниз). Векторы
вниз). Векторы  и
и  , определенные (и по модулю, и по направлению) парами чисел
, определенные (и по модулю, и по направлению) парами чисел  и
и  (как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как
(как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как 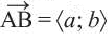 . Эта запись называется записью вектора с компонентами.
. Эта запись называется записью вектора с компонентами.
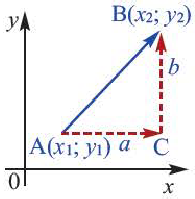
Равные векторы имеют равные компоненты. Наоборот, если, соответствующие компоненты векторов равны, то эти векторы равны. На рисунке  . Если дан какой либо вектор
. Если дан какой либо вектор  , то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
, то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
На координатной плоскости вектор  с начальной точкой
с начальной точкой  и конечной точкой
и конечной точкой  согласно координатам этих точек можно выразить с компонентами. Так как
согласно координатам этих точек можно выразить с компонентами. Так как  , то
, то  . Здесь
. Здесь  называются также координатами вектора.
называются также координатами вектора.
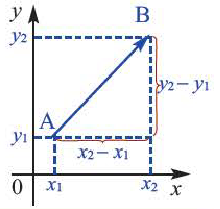
Длина вектора
Длину вектора можно найти по координатам начальной у и конечной точек, используя формулу расстояния между точками.

Длину вектора данными с компонентами можно найти по формуле: 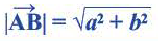
Пример 1.
Напишите вектор  начальная точка которого
начальная точка которого  , конечная
, конечная  в виде
в виде 
Решение: Напишем вектор с компонентами: 

Пример 2.
Точка  начальная точка вектора
начальная точка вектора  Найдите координаты конечной точки этого вектора.
Найдите координаты конечной точки этого вектора.
Решение: Примем за координаты конечной точки вектора  – точку
– точку  : Тогда
: Тогда  . Конечная точка этого вектора
. Конечная точка этого вектора 
Пример 3.
В координатной плоскости нарисуйте несколько векторов равных вектору  начальными точками которых являются точки
начальными точками которых являются точки  .
.
Решение: Данные точки отмечаются на координатной плоскости. Начиная с этих точек изображаются векторы равные 
Пример 4.
 и
и  соответственно начальная и конечная точка вектора
соответственно начальная и конечная точка вектора  . Напишите этот вектор в виде
. Напишите этот вектор в виде  и найдите длину
и найдите длину 
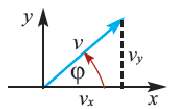
Направление вектора
В соответствии с областями применения существуют различные способы определения направления вектора. В повседневной жизни мы выражаем направление словами налево, направо, вниз, вверх или же восток, запад, север, юг. На координатной плоскости направление вектора определяется углом с положительным направлением оси  против часовой стрелки. Этот угол назовем углом наклона.
против часовой стрелки. Этот угол назовем углом наклона.
На рисунке длина вектора  обозначена
обозначена  а угол, определяющий направление, через
а угол, определяющий направление, через  .
.
длина вектора: 
направление вектора:  или
или 
Иногда для простоты вектор изображается на плоскости только указанием положительного направления  .
.
Пример 1.
Вектор перемещения, модуль которого 200 м, направлен под углом наклона  Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Решение: От начала луча, образующий с положительным направлением оси угол в  , соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
, соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
Пример 2.
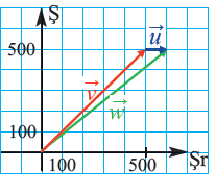
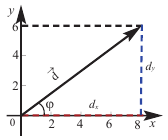
Определите длину и угол наклона вектора 
Решение: Произвольную точку на координатной плоскости примем за начало вектора. От этой точки по горизонтальной оси отложим компоненту  , равную 3 единицам, по вертикальной оси отложим компоненту
, равную 3 единицам, по вертикальной оси отложим компоненту  , равную 4 единицам, и построим вектор
, равную 4 единицам, и построим вектор  как показано на рисунке. Если измерить транспортиром угол
как показано на рисунке. Если измерить транспортиром угол  , то можно увидеть, что его приближенное значение равно
, то можно увидеть, что его приближенное значение равно  Это можно проверить вычислениями.
Это можно проверить вычислениями.
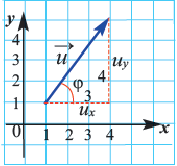
Длина вектора:  Угол наклона:
Угол наклона: 
Сложение и вычитание коллинеарных векторов
Вектор, показывающий сумму одинаково направленных коллинеарных векторов называется результирующим. Его абсолютная величина равна сумме абсолютных величин данных векторов, а сам вектор имеет одинаковое направление с данными векторами.

Абсолютная величина результирующего вектора 2-х противоположно-направленных коллинеарных векторов равна разности абсолютных величин этих векторов, а направление совпадает с направлением вектора большего по абсолютной величине.

Выполним графически сложение векторов, соответствующее реальным жизненным ситуациям.
Задача 1.
Для того, чтобы достичь финиша, Джамиля должна пройти 3 знака. Если она пройдет 10 м на восток, то доберется до 1-го знака, потом пройдя 50 м вперед до 2-го знака и, пройдя в том же направлении еще 20 м, сможет добраться до финиша. Изобразите движение Джамили графически – векторами. Выберем масштаб:
1 см : 10 м и на числовой оси нарисуем векторы так, чтобы начало второго вектора совпало с концом первого, а начало третьего с концом второго.

Результирующий вектор обозначим через  Его длину можно выразить как:
Его длину можно выразить как: 
Общее перемещение: 10 м + 50 м + 20 м = 80 м (на восток) Изображается вектор  длиной 8 см согласно выбранному масштабу.
длиной 8 см согласно выбранному масштабу.
Задача 2.
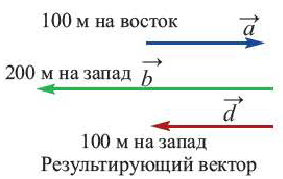
Представьте, что вы прошли 100 м на восток, еще 200 метров на запад.
Нарисуем данные вектора в масштабе
По определению, модуль результирующего вектора равен разности модулей векторов. А направление будет на запад.
В этом случае длина результирующего вектора  равна:
равна: 
200 м 100 м = 100 м (на запад)
Пусть векторы  и
и  противоположно направленные, а
противоположно направленные, а  их результирующий вектор. При
их результирующий вектор. При  и вектор
и вектор  одинаково направлен с вектором .
одинаково направлен с вектором .
При  и вектор одинаково направлен с вектором .
и вектор одинаково направлен с вектором .
При  то есть сумма противоположных векторов равна
то есть сумма противоположных векторов равна  вектору.
вектору.
Для того, чтобы найти разность  нужно к вектору
нужно к вектору  прибавить вектор
прибавить вектор  , противоположный вектору
, противоположный вектору  .
.
То есть выражения  эквивалентные.
эквивалентные.


Жившие в XVII веке ученые-математики Рене Декарт и Пьер Ферма, взаимосвязывая алгебру и геометрию, создали новую область науки-аналитическую геометрию. Аналитическая геометрия, благодаря методу координат, позволила, с одной стороны, посредством алгебраических выкладок легко доказывать геометрические теоремы, а с другой стороны, в силу наглядности геометрических представлений упрощает решение задач над векторами.
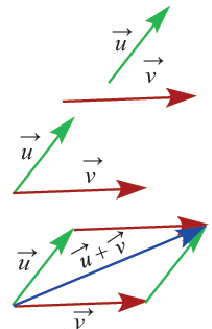
Сложение векторов
Существуют различные способы сложения неколлинеарных векторов. Рассмотрим два графических способа. При сложении векторов графическим способом данные вектора и результирующий вектор, показывающий их сумму строятся с помощью линейки (модуль) и транспортира(направление).
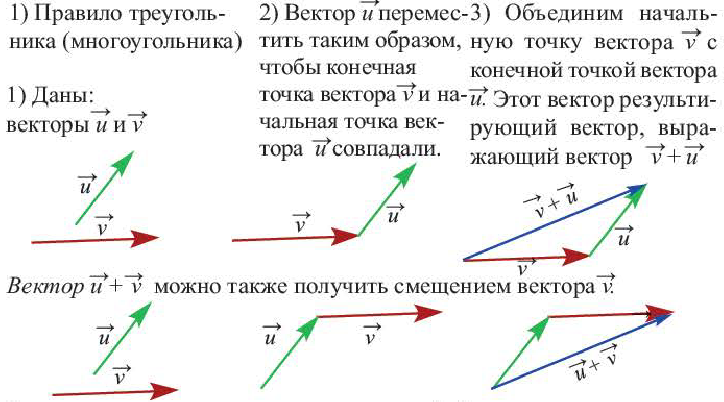
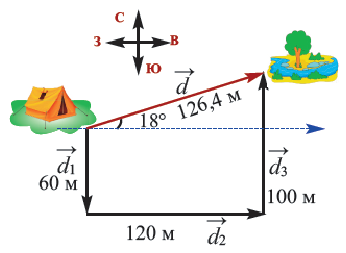
Вектора можно складывать в любой последовательности. Переместительное свойство сложения верно и для векторов. По этому правилу можно складывать три и более вектора. Определим графическим способом вектор  Для этого: 1) нарисуем вектор
Для этого: 1) нарисуем вектор  противоположный вектору
противоположный вектору  2)
2)  переместим так, чтобы конечная точка вектора
переместим так, чтобы конечная точка вектора  совпадала с начальной точкой вектора
совпадала с начальной точкой вектора 
3. Соединим начальную точку вектора  и конечную точку вектора
и конечную точку вектора  Это будет вектор
Это будет вектор 
Пример 1.
Джамал прошел от палатки, разбитой в лагере 60 метров на юг, 120 м на восток, еще 100 м на север и дошел до озера. Какое наименьшее расстояние от палатки до озера?
Решение:
Выберем масштаб: 1 см : 40 м
Движение Джамала изобразим последовательно соответствующими векторами по выбранному масштабу.
Начальную точку 1-го вектора, показывающего движение Джамала, соединим с конечной точкой 3-го вектора. Полученный результирующий вектор  выражает сумму векторов
выражает сумму векторов 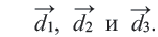 Длина этого вектора приблизительно 126,4 метров, а направление под углом
Длина этого вектора приблизительно 126,4 метров, а направление под углом 
Ответ: Озеро находится на расстоянии 126,4 м от палатки.
Правило параллелограмма
1. Даны вектора:  и
и 
2. Переместим вектор  так, чтобы начальные точки векторов
так, чтобы начальные точки векторов  и совпадали.
и совпадали.
3. Построим параллелограмм со сторонами и параллельным переносом соответствующих векторов и  Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов
Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов  показывает их сумму:
показывает их сумму: 
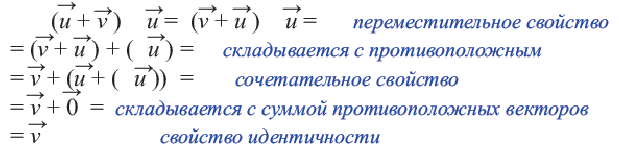
Переместительные и сочетательные свойства сложения векторов
Для любых векторов  верно следующее:
верно следующее:
Переместительное свойство: 
Сочетательное свойство: 
Свойство идентичности: 
Сумма противоположенных векторов: 
Пример:
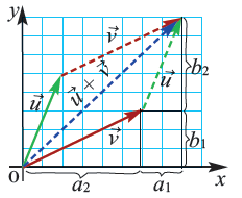
Сложение векторов, заданных компонентами
Выполним сложение двух векторов на координатной плоскости, используя их компоненты.
Суммой векторов  и
и  будет вектор:
будет вектор: 
Пример 1.
Если  и
и  то вектор
то вектор  выразите через компоненты.
выразите через компоненты.
Решение: Для того, чтобы найти компоненты вектора  нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов
нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов 

Пример 2.
Самолет летит в направлении северо-востока со скоростью 707 миль/час. Скорость самолета выражается вектором  В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором
В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором  Как изменится скорость самолета под воздействием ветра?
Как изменится скорость самолета под воздействием ветра? 
Конечная скорость самолета:
Аналогично можно показать, что 
Пример 3.
Если  , то
, то 
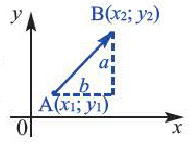
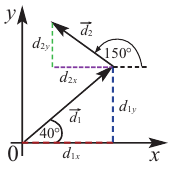
Тригонометрические отношения и компоненты вектора
Найдем компоненты вектора  в координатной плоскости, используя тригонометрические отношения. Обозначим
в координатной плоскости, используя тригонометрические отношения. Обозначим 
 имеем:
имеем: 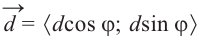
Запись  также является записью вектора с компонентами. Угол наклона можно найти по формуле
также является записью вектора с компонентами. Угол наклона можно найти по формуле 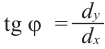
Пример 1.
Автомобиль движется в северо-восточном направлении под углом  со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
Решение: По данным 

скорость в вост. напр. 
скорость в север, напр. 
Пример 2.
Движения мяча изображены двумя векторами:  с углом наклона
с углом наклона  и модулем равным 18 м и
и модулем равным 18 м и  с углом наклона
с углом наклона  и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
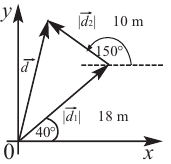
Решение: Перемещение мяча:  Запишем векторы
Запишем векторы  c компонентами:
c компонентами: 
Здесь 

Пусть 
По правилу сложения векторов с заданными компонентами имеем: 
Найдем длину и угол наклона вектора перемежения  мяча, изобразив этот вектор в новой системе координат.
мяча, изобразив этот вектор в новой системе координат.

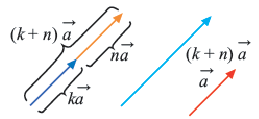
Умножение вектора на число
Произведение вектора на число
на число  записывается как
записывается как  а его длина равна
а его длина равна  при
при  вектора
вектора  имеют одинаковое направление, при
имеют одинаковое направление, при  вектора
вектора  имеют противоположное направление.
имеют противоположное направление. 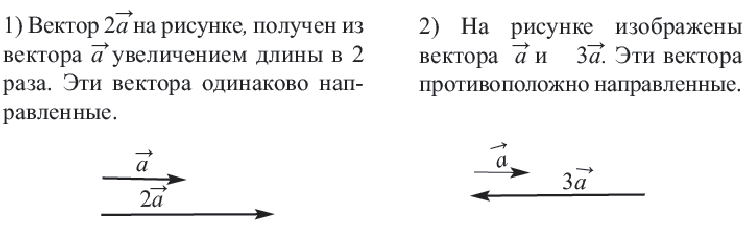 Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если
Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если  и
и  коллинеарные векторы, то существует единственное число
коллинеарные векторы, то существует единственное число  что
что 
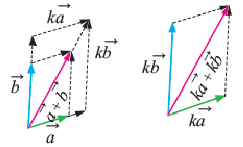
Свойство умножения вектора на число
1. Сочетательное свойство.
Для любых чисел  и вектора
и вектора 

2. Распределительное свойство.
Для любых чисел  и вектора
и вектора 

Для любого числа  и векторов
и векторов 

Действия над векторами, заданным над координатами
Для вектора  заданного компонентами и для любого числа
заданного компонентами и для любого числа  верно:
верно: 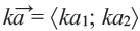
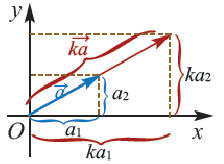
Пример: Если 
Пример: Если 

• Соответствующие координаты коллинеарных векторов пропорциональны.
• Наоборот, если соответствующие координаты векторов пропорциональны, то эти векторы коллинеарные.
Условие коллинеарности векторов  (при
(при  )
)
Пример: При каком значении  векторы
векторы  коллинеарны?
коллинеарны?
Подробное объяснение вектора:
Определение: Вектор — Упорядоченную совокупность  n вещественных чисел называют n-мерным вектором, а числа
n вещественных чисел называют n-мерным вектором, а числа  – компонентами, или координатами, вектора.
– компонентами, или координатами, вектора.
Пример:
Если, например, некоторый автомобильный завод должен выпустить в смену 50 легковых автомобилей, 100 грузовых, 10 автобусов, 50 комплектов запчастей для легковых автомобилей и 150 комплектов для грузовых автомобилей и автобусов, то производственную программу этого завода можно записать в виде вектора (50, 100, 10, 50, 150), имеющего пять компонент.
Обозначения:
Векторы обозначают жирными строчными буквами или буквами с чертой или стрелкой наверху, например,  Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Компоненты вектора нельзя менять местами, например, (3, 2, 5, 0, 1)  (2, 3, 5, 0, 1).
(2, 3, 5, 0, 1).
Операции над векторами. Произведением вектора  на действительное число
на действительное число  называется вектор
называется вектор  Суммой векторов
Суммой векторов  и
и  называется вектор
называется вектор 
Пространство векторов. N-мерное векторное пространство  определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
Экономическая иллюстрация. Экономическая иллюстрация n-мерного векторного пространства: пространство благ (товаров). Под товаром мы будем понимать некоторое благо или услугу, поступившие в продажу в определенное время в определенном месте. Предположим, что существует конечное число наличных товаров n; количества каждого из них, приобретенные потребителем, характеризуются набором товаров

где через  обозначается количество
обозначается количество  блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров
блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров 
Линейная независимость. Система  n-мерных векторов называется линейно зависимой, если найдутся такие числа
n-мерных векторов называется линейно зависимой, если найдутся такие числа  из которых хотя бы одно отлично от нуля, что выполняется равенство
из которых хотя бы одно отлично от нуля, что выполняется равенство  в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все
в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все  Геометрический смысл линейной зависимости векторов в
Геометрический смысл линейной зависимости векторов в  интерпретируемых как направленные отрезки, поясняют следующие теоремы.
интерпретируемых как направленные отрезки, поясняют следующие теоремы.
Теорема 1. Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой.
Теорема 2. Для того, чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны.
Теорема 3. Для того, чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны.
Левая и правая тройки векторов. Тройка некомпланарных векторов  называется правой, если наблюдателю из их общего начала обход концов векторов
называется правой, если наблюдателю из их общего начала обход концов векторов  в указанном порядке кажется совершающимся по часовой стрелке. В противном случае
в указанном порядке кажется совершающимся по часовой стрелке. В противном случае  – левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
– левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
Базис и координаты. Тройка  некомпланарных векторов в называется базисом, а сами векторы
некомпланарных векторов в называется базисом, а сами векторы  – базисными. Любой вектор
– базисными. Любой вектор  может быть единственным образом разложен по базисным векторам, то есть представлен в виде
может быть единственным образом разложен по базисным векторам, то есть представлен в виде  (1.1) числа
(1.1) числа  в разложении (1.1) называются координатами вектора
в разложении (1.1) называются координатами вектора  в базисе
в базисе  и обозначаются
и обозначаются 
Ортонормированный базис. Если векторы  попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты
попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты  прямоугольными. Базисные векторы ортонормированного базиса будем обозначать
прямоугольными. Базисные векторы ортонормированного базиса будем обозначать  Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат
Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат 
Векторное произведение. Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  , который определяется следующими тремя условиями:
, который определяется следующими тремя условиями:
- Длина вектора
 численно равна площади параллелограмма, построенного на векторах
численно равна площади параллелограмма, построенного на векторах 
- Вектор
 перпендикулярен к каждому из векторов
перпендикулярен к каждому из векторов 
- Векторы
 взятые в указанном порядке, образуют правую тройку.
взятые в указанном порядке, образуют правую тройку.
Для векторного произведения  вводится обозначение
вводится обозначение 
Если векторы  коллинеарны, тo
коллинеарны, тo  в частности,
в частности,  Векторные произведения ортов:
Векторные произведения ортов:  Если векторы
Если векторы  заданы в базисе
заданы в базисе  координатами
координатами  то
то  Смешанное произведение. Если векторное произведение двух векторов
Смешанное произведение. Если векторное произведение двух векторов  скалярно умножается на третий вектор
скалярно умножается на третий вектор  , то такое произведение трех векторов называется смешанным произведением и обозначается символом
, то такое произведение трех векторов называется смешанным произведением и обозначается символом  Если векторы
Если векторы  в базисе
в базисе  заданы своими координатами
заданы своими координатами 
Смешанное произведение имеет простое геометрическое толкование – это скаляр, по абсолютной величине равный объему параллелепипеда, построенного на трех данных векторах.
Если векторы образуют правую тройку, то их смешанное произведение есть число положительное, равное указанному объему; если же тройка  – левая, то
– левая, то  и
и  следовательно
следовательно 
Координаты векторов, встречающиеся в задачах первой главы, предполагаются заданными относительно правого ортонормированного базиса. Единичный вектор, сонаправленный вектору  обозначается символом
обозначается символом  Символом
Символом  обозначается радиус-вектор точки М, символами
обозначается радиус-вектор точки М, символами  обозначаются модули векторов
обозначаются модули векторов 
Пример №1
Найдите угол между векторами единичные векторы и угол между
единичные векторы и угол между  равен 120°.
равен 120°.
Решение:
Имеем: 




Окончательно имеем: 
Пример №2
Зная векторы АВ(-3,-2,6) и ВС(-2,4,4), вычислите длину высоты AD треугольника АВС.
Решение:
Обозначая площадь треугольника АВС через S, получим:

 значит, вектор
значит, вектор  имеет координаты
имеет координаты  (—5,2,10).
(—5,2,10).


Пример №3
Даны два вектора  Найдите единичный вектор
Найдите единичный вектор  , ортогональный векторам
, ортогональный векторам  и направленный так, чтобы упорядоченная тройка векторов
и направленный так, чтобы упорядоченная тройка векторов 
 была правой.
была правой.
Решение:
Обозначим координаты вектора  относительно данного правого ортонормированного базиса через
относительно данного правого ортонормированного базиса через  Поскольку
Поскольку  По условию задачи требуется, чтобы
По условию задачи требуется, чтобы  и
и  Имеем систему уравнений для нахождения
Имеем систему уравнений для нахождения 
Из первого и второго уравнений системы получим  Подставляя
Подставляя  в третье уравнение, будем иметь:
в третье уравнение, будем иметь: 
Используя условие  получим неравенство
получим неравенство 
С учетом выражений для  перепишем полученное неравенство в виде:
перепишем полученное неравенство в виде:  откуда следует, что
откуда следует, что 
Линейные операции над векторами
1. Сумма векторов. Для нахождения суммы векторов существует два правила: а) правило треугольника. Пусть векторы и неколлинеарные и пусть начало вектора совмещено с концом вектора , тогда их суммой будет вектор  начало которого совпадает с началом вектора , а его конец – с концом вектора (Рис. 3):
начало которого совпадает с началом вектора , а его конец – с концом вектора (Рис. 3):
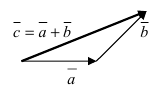
Рис. 3. Сложение векторов по правилу треугольника.
б) правило параллелограмма. Пусть векторы  неколлинеарные и пусть начала векторов
неколлинеарные и пусть начала векторов  совпадают. Построим на векторах
совпадают. Построим на векторах  параллелограмм (Рис. 4), тогда их суммой будет вектор
параллелограмм (Рис. 4), тогда их суммой будет вектор  начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма:
начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма: 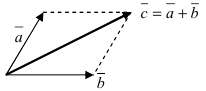
Рис. 4. Сложение векторов по правилу параллелограмма.
Сумма векторов обладает следующими свойствами:
-переместительным  ; – сочетательным
; – сочетательным 
2. Разность векторов. Разностью векторов  называется вектор
называется вектор  сумма которого с вектором
сумма которого с вектором  дает вектор
дает вектор  (Рис. 5):
(Рис. 5): 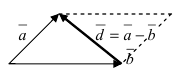 Рис. 5. Разность векторов.
Рис. 5. Разность векторов.
3. Умножение вектора на вещественное число. При умножении веществе иного числа k на вектор  получают ему коллинеарный вектор
получают ему коллинеарный вектор  длина которого равна
длина которого равна  сонаправленный с вектором
сонаправленный с вектором  если
если  и антинаправленный вектору
и антинаправленный вектору  если
если 
Замечание: Числа в векторной алгебре называют скалярами. Отметим здесь, что векторы и скаляры нельзя складывать и вычитать, так как это объекты разной природы.
Замечание: Из определения операции 3 следует первое условие коллинеарности векторов:  – отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
– отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
Пример №4
Найти произведение вектора  на 2 и (-3).
на 2 и (-3).
Решение:
Используя вышеприведенное правило, получим 
Произведение числа на вектор обладает следующими свойствами:
- – сочетательным

- – распределительным относительно скаляров

- -распределительным относительно векторов

Замечание: Если k = 0, то в результате умножения  , получают нулевой вектор.
, получают нулевой вектор.
Определение: Нулевым вектором называется вектор, начало и конец которого совпадают, т.е. расположены в одной точке.
Проекция вектора на произвольную ось
Пусть дана ось l и вектор  Проведем через начало вектора
Проведем через начало вектора  прямую,
прямую,
которая параллельна оси l, угол между прямой и вектором  обозначим через
обозначим через  (Рис. 6):
(Рис. 6):
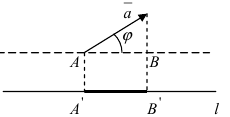
Рис. 6. Проекция вектора на заданную ось.
Из начала и конца вектора  опустим на ось l перпендикуляры, получим отрезок
опустим на ось l перпендикуляры, получим отрезок 
Определение: Проекцией вектора  на ось l называется длина отрезка
на ось l называется длина отрезка  взятая со знаком «+», если угол
взятая со знаком «+», если угол  и со знаком «-», если
и со знаком «-», если  Из рисунка видно, что отрезок
Из рисунка видно, что отрезок  следовательно,
следовательно,  Из этой формулы видно, что при
Из этой формулы видно, что при  величина
величина  а при
а при  величина
величина  При
При  проекция равна нулю, Т. е.
проекция равна нулю, Т. е. 
Проекции обладают свойствами:
– если  то
то 
Декартова система координат и вектора
Определение: Направленная прямая с выбранным началом отсчета и масштабом измерения называется числовой осью.
Определение: Две (три) взаимно перпендикулярные числовые оси называются декартовой системой координат на плоскости (в пространстве).
Рассмотрим декартову систему координат и спроектируем вектор  на координатные оси (Рис. 7).
на координатные оси (Рис. 7). 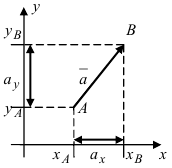
Рис. 7. Проекции вектора на оси декартовой системы координат.
Из рисунка видно, что проекции вектора  на:
на:
- – ось абсцисс (Ох) равна

- – ось ординат (Оу)

(в пространстве – ось аппликат (Oz)  ).
).
Определение: Проекции  называются координатами вектора
называются координатами вектора  Используя теорему Пифагора, найдем длину вектора
Используя теорему Пифагора, найдем длину вектора 

Направляющие косинусы вектора 
Обозначим углы, которые образует вектор  с положительными направлениями координатных осей пространственной декартовой системы отсчета через
с положительными направлениями координатных осей пространственной декартовой системы отсчета через  Тогда
Тогда 
Определение: Величины  называются направляющими косинусами вектора
называются направляющими косинусами вектора 
Вычислив квадрат модуля вектора  найдем соотношение, которое связывает направляющие косинусы вектора
найдем соотношение, которое связывает направляющие косинусы вектора 

Способы задания вектора
- Задаются координаты начальной и конечной точек вектора
 и
и . Тогда
. Тогда 
- Задаются аффинные координаты вектора

- Задаются длина вектора и два любых угла, которые образует вектор
 с какими-либо координатными осями и знак одной из проекций:
с какими-либо координатными осями и знак одной из проекций:
 , но так как по условию
, но так как по условию  , то
, то  . Следовательно,
. Следовательно, 
Деление отрезка в заданном отношении
Пусть в пространственной декартовой системе отсчета даны две точки  и
и  Требуется найти на заданном отрезке
Требуется найти на заданном отрезке  такую точку
такую точку  чтобы
чтобы  где
где  – заданное число (Рис. 8).
– заданное число (Рис. 8). 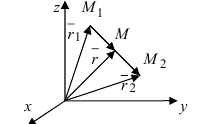
Рис. 8. Деление отрезка в заданном отношении.
Из рисунка видно, что В силу того, что
В силу того, что  Подставляя это равенство в систему и исключая вектор
Подставляя это равенство в систему и исключая вектор  найдем, что
найдем, что  .
.
Отсюда найдем вектор 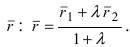 В проекциях на координатные оси это равенство равносильно системе равенств
В проекциях на координатные оси это равенство равносильно системе равенств 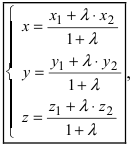 которая определяет деление отрезка в заданном отношении. Если точка
которая определяет деление отрезка в заданном отношении. Если точка  делит отрезок
делит отрезок  пополам
пополам  то система полученных равенств принимает вид известный из курса математики средней школы
то система полученных равенств принимает вид известный из курса математики средней школы 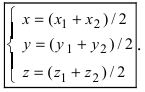
Понятие базиса векторов
Определение: Любые два (три) неколлинеарных (некомпланарных) вектора образуют базис.
Теорема: Пусть даны два неколлинеарных вектора  и
и  . Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и
. Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и  :
:  , где
, где  и
и  – вещественные числа.
– вещественные числа.
Доказательство: Пусть векторы  ,
,  и
и  приведены к общему началу (Рис. 9), т.е.
приведены к общему началу (Рис. 9), т.е.
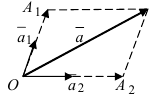
Рис. 9. Разложение вектора по заданному базису.
Из рисунка видно, что  (правило параллелограмма, Лекция .№ 4). Вектор
(правило параллелограмма, Лекция .№ 4). Вектор  коллинеарен вектору
коллинеарен вектору  а вектор
а вектор  вектору
вектору  Следовательно, найдутся 2 вещественных числа
Следовательно, найдутся 2 вещественных числа  такие, что будут выполняться равенства:
такие, что будут выполняться равенства:  Отсюда следует, что
Отсюда следует, что 
Докажем единственность разложения вектора  по базису
по базису  Пусть существуют другие вещественные числа
Пусть существуют другие вещественные числа  такие что
такие что  и пусть хотя бы одна из пар
и пусть хотя бы одна из пар  содержит разные числа, например,
содержит разные числа, например,  Вычитая из первого разложения второе, получим
Вычитая из первого разложения второе, получим

Это означает, что векторы  коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора
коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора  по базису
по базису  единственно и имеет ВИД
единственно и имеет ВИД  В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами
В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами 
Замечание: С геометрической точки зрения числа  определяют те числа, на которые надо умножить базисные вектора
определяют те числа, на которые надо умножить базисные вектора  чтобы по правилу параллелограмма получить вектор
чтобы по правилу параллелограмма получить вектор  В трехмерном пространстве произвольный вектор
В трехмерном пространстве произвольный вектор  может быть разложен по некомпланарной тройке векторов
может быть разложен по некомпланарной тройке векторов 
 причем единственным образом.
причем единственным образом.
Определение: Ортом направления оси  называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью
называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью  Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс – Ох, ординат – Оу и аппликат – Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей:
Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс – Ох, ординат – Оу и аппликат – Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей: – через
– через – через
– через  – через
– через  (Рис. 10):
(Рис. 10): 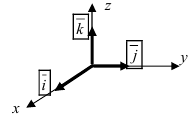
Рис. 10. Орты (единичные векторы) декартовой системы координат.
Из Рис. 10 видно, что орты осей имеют следующие проекции:

Так как векторы  некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел
некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел  выступают проекции вектора:
выступают проекции вектора: 
Векторы в геометрии
Изучая материал этого параграфа, вы узнаете, что векторы используются не только в физике, но и в геометрии. Вы научитесь складывать и вычитать векторы, умножать вектор на число, находить угол между двумя векторами, применять свойства векторов для решения задач.
Понятие вектора в геометрии
Вы знаете много величин, которые определяются своими числовыми значениями: масса, площадь, длина, объем, время, температура и т. д. Такие величины называют скалярными величинами или скалярами.
Из курса физики вам знакомы величины, для задания которых недостаточно знать только их числовое значение. Например, если на пружину действует сила 5  то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
Величины, которые определяются не только числовым значением, но и направлением, называют векторными величинами или векторами.
Сила, перемещение, скорость, ускорение, вес — примеры векторных величин.
Есть векторы и в геометрии.
Рассмотрим отрезок  Если мы договоримся точку
Если мы договоримся точку  считать началом отрезка, а точку
считать началом отрезка, а точку  — его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки
— его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки  к точке
к точке 
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Вектор с началом в точке  и концом в точке
и концом в точке  обозначают так:
обозначают так:  (читают: «вектор
(читают: «вектор 
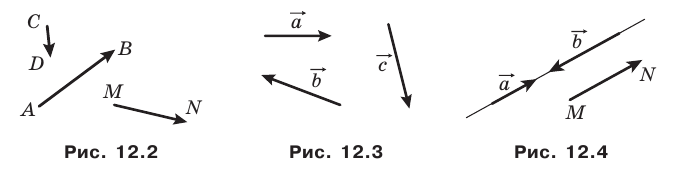
На рисунках вектор изображают отрезком со стрелкой, указывающей его конец. На рисунке 12.2 изображены векторы 
 Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы
Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы 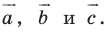
Вектор, у которого начало и конец — одна и та же точка, называют нулевым вектором или нуль-вектором и обозначают  Если начало и конец нулевого вектора — это точка
Если начало и конец нулевого вектора — это точка  то его можно обозначить и так:
то его можно обозначить и так:  На рисунке нулевой вектор изображают точкой.
На рисунке нулевой вектор изображают точкой.
Модулем вектора  называют длину отрезка
называют длину отрезка  Модуль вектора
Модуль вектора  обозначают так:
обозначают так:  а модуль вектора
а модуль вектора  — так:
— так: 
Модуль нулевого вектора считают равным нулю: 
Определение. Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой.
Нулевой вектор считают коллинеарным любому вектору.
На рисунке 12.4 изображены коллинеарные векторы  и
и 
Тот факт, что векторы  коллинеарны, обозначают так:
коллинеарны, обозначают так: 
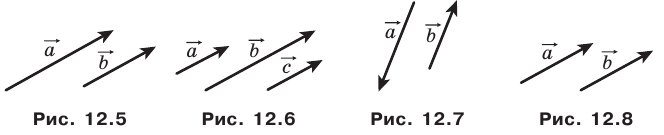
На рисунке 12.5 ненулевые коллинеарные векторы  одинаково направлены. Такие векторы называют сонаправленными и пишут:
одинаково направлены. Такие векторы называют сонаправленными и пишут: 
Если 
Аналогичным свойством обладают и сонаправленные векторы, то есть если  (рис. 12.6).
(рис. 12.6).
На рисунке 12.7 ненулевые коллинеарные векторы  противоположно направлены. Этот факт обозначают так:
противоположно направлены. Этот факт обозначают так: 
Определение. Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны.
На рисунке 12.8 изображены равные векторы  Это обозначают так:
Это обозначают так: 
Равенство ненулевых векторов  означает, что
означает, что  и
и 
Нетрудно доказать, что если  Убедитесь в этом самостоятельно.
Убедитесь в этом самостоятельно.
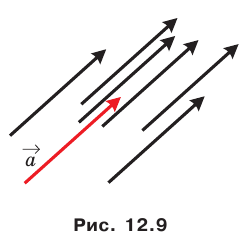
Часто, говоря о векторах, мы не конкретизируем, какая точка является началом вектора. Так, на рисунке 12.9 изображены вектор а и векторы, равные вектору  Каждый из них также принято называть вектором
Каждый из них также принято называть вектором 
На рисунке 12.10, а изображены вектор  и точка
и точка  Если построен вектор
Если построен вектор  равный вектору
равный вектору  то говорят, что вектор
то говорят, что вектор  отложен от точки
отложен от точки  (рис. 12.10, б).
(рис. 12.10, б).
Покажем, как от произвольной точки  отложить вектор, равный данному вектору
отложить вектор, равный данному вектору 
Если вектор  нулевой, то искомым вектором будет вектор
нулевой, то искомым вектором будет вектор 
Теперь рассмотрим случай, когда  Пусть точка
Пусть точка  лежит на прямой, содержащей вектор
лежит на прямой, содержащей вектор  (рис. 12.11). На этой прямой существуют две точки
(рис. 12.11). На этой прямой существуют две точки  такие, что
такие, что  На указанном рисунке вектор
На указанном рисунке вектор  будет равным вектору
будет равным вектору  Его и следует выбрать.
Его и следует выбрать.
Если точка  не принадлежит прямой, содержащей вектор
не принадлежит прямой, содержащей вектор  то через точку
то через точку  проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
От заданной точки можно отложить только один вектор, равный данному.
Пример №5
Дан четырехугольник  Известно, что
Известно, что  и
и  Определите вид четырехугольника
Определите вид четырехугольника 
Решение:
Из условия  следует, что
следует, что  Следовательно, четырехугольник
Следовательно, четырехугольник  — параллелограмм.
— параллелограмм.
Равенство  означает, что диагонали четырехугольника
означает, что диагонали четырехугольника  равны. А параллелограмм с равными диагоналями — прямоугольник.
равны. А параллелограмм с равными диагоналями — прямоугольник. 
Координаты вектора
Рассмотрим на координатной плоскости вектор  Отложим от начала координат равный ему вектор
Отложим от начала координат равный ему вектор  (рис. 13.1). Координатами вектора
(рис. 13.1). Координатами вектора  называют координаты точки
называют координаты точки  Запись
Запись  означает, что вектор
означает, что вектор  имеет координаты
имеет координаты 
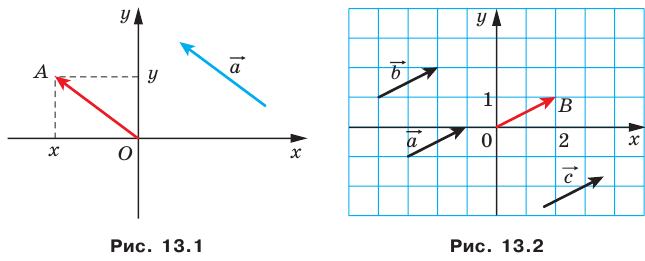
Числа  называют соответственно первой и второй координатами вектора
называют соответственно первой и второй координатами вектора 
Из определения следует, что равные векторы имеют равные соответствующие координаты. Например, каждый из равных векторов  (рис. 13.2) имеет координаты
(рис. 13.2) имеет координаты 
Справедливо и обратное утверждение: если соответствующие координаты векторов равны, то равны и сами векторы.
Действительно, если отложить такие векторы от начала координат, то их концы совпадут.
Очевидно, что нулевой вектор имеет координаты 
Теорема 13.1. Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  и
и  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Доказательство: Пусть вектор  равный вектору
равный вектору  имеет координаты
имеет координаты  Докажем, что
Докажем, что 
Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Отложим от начала координат вектор
Отложим от начала координат вектор  равный вектору
равный вектору  Тогда координаты точки
Тогда координаты точки  равны
равны 
Поскольку  то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков
то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков  совпадают. Координаты середин отрезков
совпадают. Координаты середин отрезков  соответственно равны
соответственно равны  Тогда
Тогда

Эти равенства выполняются и тогда, когда точка  совпадает с точкой
совпадает с точкой  или точка
или точка  совпадает с точкой
совпадает с точкой 
Отсюда 
Из формулы расстояния между двумя точками следует, что если вектор  имеет координаты
имеет координаты  то
то
Пример №6
Даны координаты трех вершин параллелограмма 
 Найдите координаты вершины
Найдите координаты вершины 
Решение:
Поскольку четырехугольник  — параллелограмм, то
— параллелограмм, то  Следовательно, координаты этих векторов равны.
Следовательно, координаты этих векторов равны.
Пусть координаты точки  равны
равны  Для нахождения координат векторов
Для нахождения координат векторов  воспользуемся теоремой 13.1.
воспользуемся теоремой 13.1.
Имеем:

Отсюда: 
Ответ: 
Сложение и вычитание векторов
Если тело переместилось из точки  в точку
в точку  а затем из точки
а затем из точки  в точку
в точку  то суммарное перемещение из точки
то суммарное перемещение из точки  в точку
в точку  естественно представить в виде вектора
естественно представить в виде вектора  считая этот вектор суммой векторов
считая этот вектор суммой векторов 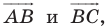 то есть
то есть  (рис. 14.1).
(рис. 14.1).
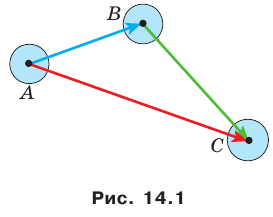
Этот пример подсказывает, как ввести понятие суммы векторов, то есть как сложить два данных вектора  и
и 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  Далее от точки
Далее от точки  отложим вектор
отложим вектор  равный вектору
равный вектору  Вектор
Вектор  называют суммой векторов
называют суммой векторов  (рис. 14.2) и записывают:
(рис. 14.2) и записывают: 
Описанный алгоритм сложения двух векторов называют правилом треугольника.
Это название связано с тем, что если векторы  не коллинеарны, то точки
не коллинеарны, то точки  являются вершинами треугольника (рис. 14.2).
являются вершинами треугольника (рис. 14.2).
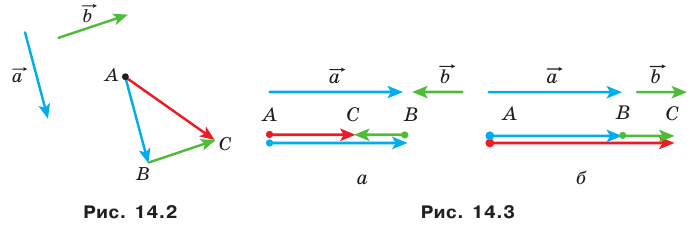
По правилу треугольника можно складывать и коллинеарные векторы. На рисунке 14.3 вектор  равен сумме коллинеарных векторов
равен сумме коллинеарных векторов 
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило треугольника для сложения векторов.
которое выражает правило треугольника для сложения векторов.
Теорема 14.1. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Доказательство: Пусть точки  таковы, что
таковы, что  Имеем:
Имеем: 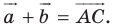 Докажем, что координаты вектора
Докажем, что координаты вектора  равны
равны 
Найдем координаты векторов 

Имеем:

С учетом того, что  получаем:
получаем: 
Замечание. Описывая правило треугольника для нахождения суммы векторов  мы отложили вектор
мы отложили вектор  от произвольной точки. Если точку
от произвольной точки. Если точку  заменить точкой
заменить точкой  то вместо вектора
то вместо вектора  равного сумме векторов
равного сумме векторов  получим некоторый вектор
получим некоторый вектор  Из теоремы 14.1 следует, что координаты векторов
Из теоремы 14.1 следует, что координаты векторов  равны
равны  следовательно,
следовательно,  Это означает, что сумма векторов
Это означает, что сумма векторов  не зависит от того, от какой точки отложен вектор
не зависит от того, от какой точки отложен вектор  Свойства сложения векторов аналогичны свойствам сложения чисел.
Свойства сложения векторов аналогичны свойствам сложения чисел.
Для любых векторов  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство.
— сочетательное свойство.
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенств. Сделайте это самостоятельно.
Сумму трех и более векторов находят так: сначала складывают первый и второй векторы, затем складывают полученный вектор с третьим и т. д. Например, 
Из переместительного и сочетательного свойств сложения векторов следует, что при сложении нескольких векторов можно менять местами слагаемые и расставлять скобки любым способом.
В физике часто приходится складывать векторы, отложенные от одной точки. Так, если к телу приложены силы  (рис. 14.4), то равнодействующая этих сил равна сумме
(рис. 14.4), то равнодействующая этих сил равна сумме 
Для нахождения суммы двух неколлинеарных векторов, отложенных от одной точки, удобно пользоваться правилом параллелограмма для сложения векторов.
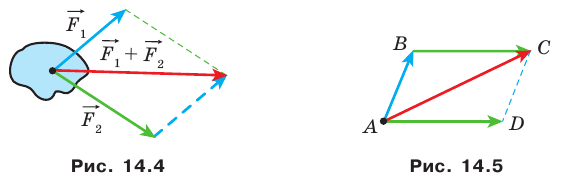 Пусть надо найти сумму неколлинеарных векторов
Пусть надо найти сумму неколлинеарных векторов  (рис. 14.5). Отложим вектор
(рис. 14.5). Отложим вектор  равный вектору
равный вектору  Тогда
Тогда  Поскольку векторы
Поскольку векторы  равны, то четырехугольник
равны, то четырехугольник  — параллелограмм с диагональю
— параллелограмм с диагональю 
Приведенные соображения позволяют сформулировать правило параллелограмма для сложения неколлинеарных векторов 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  (рис. 14.6). Тогда искомая сумма
(рис. 14.6). Тогда искомая сумма  равна вектору
равна вектору 
Определение. Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Пишут: 
Покажем, как построить вектор, равный разности данных векторов 
От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  (рис. 14.7). Тогда вектор
(рис. 14.7). Тогда вектор  равен разности
равен разности  Действительно,
Действительно,  Следовательно, по определению разности двух векторов
Следовательно, по определению разности двух векторов  то есть
то есть 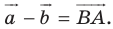
На рисунке 14.7 векторы  неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор
неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор  равен разности коллинеарных векторов
равен разности коллинеарных векторов 
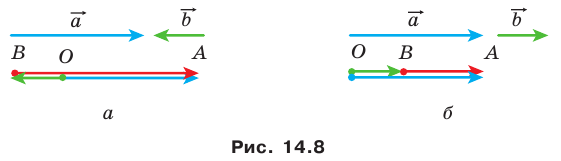 Следовательно, для любых трех точек
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
Теорема 14.2. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Докажите эту теорему самостоятельно.
Из теоремы 14.2 следует, что для любых векторов  существует единственный вектор
существует единственный вектор  такой, что
такой, что 
Определение. Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены.
Если векторы  противоположны, то говорят, что вектор
противоположны, то говорят, что вектор  противоположный вектору
противоположный вектору  а вектор
а вектор  противоположный вектору
противоположный вектору 
Вектором, противоположным нулевому вектору, считают нулевой вектор.
Вектор, противоположный вектору  обозначают так:
обозначают так: 
Из определения следует, что противоположным вектору  является вектор
является вектор  Тогда для любых точек
Тогда для любых точек  выполняется равенство
выполняется равенство 
Из правила треугольника следует, что
А из этого равенства следует, что если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Теорема 14.3. Для любых векторов  выполняется равенство
выполняется равенство 
Для доказательства достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенства. Сделайте это самостоятельно.
Теорема 14.3 позволяет свести вычитание векторов к сложению: чтобы из вектора  вычесть вектор
вычесть вектор  можно к вектору
можно к вектору  прибавить вектор
прибавить вектор  (рис. 14.9).
(рис. 14.9).
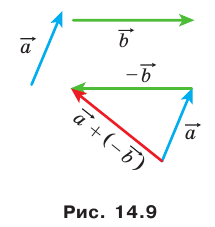
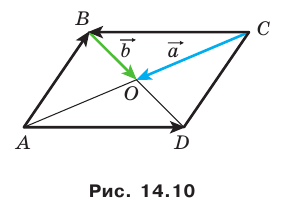
Пример №7
Диагонали параллелограмма  пересекаются в точке
пересекаются в точке  (рис. 14.10). Выразите векторы
(рис. 14.10). Выразите векторы  и
и  через векторы
через векторы 
Решение:
Поскольку точка  — середина отрезков
— середина отрезков  и
и 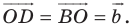
Имеем:
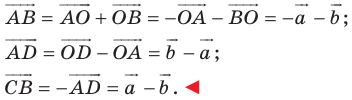
Умножение вектора на число
Пусть дан ненулевой вектор  На рисунке 15.1 изображены вектор
На рисунке 15.1 изображены вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Очевидно, что
Очевидно, что 
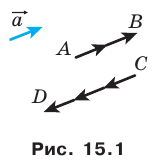
Вектор  обозначают
обозначают  и считают, что он получен в результате умножения вектора
и считают, что он получен в результате умножения вектора  на число 2. Аналогично считают, что вектор
на число 2. Аналогично считают, что вектор  получен в результате умножения вектора
получен в результате умножения вектора  на число -3, и записывают:
на число -3, и записывают: 
Этот пример подсказывает, как ввести понятие «умножение вектора на число».
Определение. Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если  если
если 
Пишут: 
Если  то считают, что
то считают, что 
На рисунке 15.2 изображены векторы 
Из определения следует, что
Также из определения следует, что если  то векторы
то векторы  коллинеарны.
коллинеарны.
А если векторы  коллинеарны, то можно ли представить вектор
коллинеарны, то можно ли представить вектор  в виде произведения
в виде произведения  Ответ дает следующая теорема.
Ответ дает следующая теорема.
Теорема 15.1. Если векторы  коллинеарны и
коллинеарны и  то существует такое число
то существует такое число  что
что 
Доказательство: Если  то при
то при  получаем, что
получаем, что  Если
Если  то или
то или 
1) Пусть  Рассмотрим вектор
Рассмотрим вектор  Поскольку
Поскольку  следовательно,
следовательно,  Кроме того,
Кроме того,  Таким образом, векторы
Таким образом, векторы  сонаправлены и их модули равны. Отсюда
сонаправлены и их модули равны. Отсюда 
2) Пусть  Рассмотрим вектор
Рассмотрим вектор  Для этого случая завершите доказательство самостоятельно.
Для этого случая завершите доказательство самостоятельно. 
Теорема 15.2. Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Доказательство: Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Рассмотрим вектор
Рассмотрим вектор  . Покажем, что
. Покажем, что  Имеем:
Имеем:

Отложим от начала координат векторы  равные соответственно векторам
равные соответственно векторам  Поскольку прямая
Поскольку прямая  проходит через начало координат, то ее уравнение имеет вид
проходит через начало координат, то ее уравнение имеет вид  Этой прямой принадлежит точка
Этой прямой принадлежит точка  Тогда
Тогда  Отсюда
Отсюда 
Следовательно, точка  также принадлежит прямой
также принадлежит прямой  поэтому векторы
поэтому векторы  коллинеарны, то есть
коллинеарны, то есть 
При  числа
числа  имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа
имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа  Следовательно, при
Следовательно, при  точки
точки  лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы
лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы  сонаправлены (рис. 15.3), то есть
сонаправлены (рис. 15.3), то есть  При
При  векторы
векторы  будут противоположно направленными, то есть
будут противоположно направленными, то есть  Следовательно, мы получили, что
Следовательно, мы получили, что 
Следствие 1. Векторы  коллинеарны.
коллинеарны.
Следствие 2. Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 

С помощью теоремы 15.2 можно доказать такие свойства умножения вектора на число.
Для любых чисел  и любых векторов
и любых векторов  выполняются равенства:
выполняются равенства:
 — сочетательное свойство;
— сочетательное свойство; — первое распределительное свойство;
— первое распределительное свойство; — второе распределительное свойство.
— второе распределительное свойство.
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правых и левых частях равенств. Сделайте это самостоятельно.
Эти свойства позволяют преобразовывать выражения, содержащие сумму векторов, разность векторов и произведение векторов на число, аналогично тому, как мы преобразовываем алгебраические выражения. Например,

Пример №8
Докажите, что если  то точки
то точки  и
и  лежат на одной прямой.
лежат на одной прямой.
Решение:
Из условия следует, что векторы  коллинеарны. Кроме того, эти векторы отложены от одной точки
коллинеарны. Кроме того, эти векторы отложены от одной точки  Следовательно, точки
Следовательно, точки  лежат на одной прямой.
лежат на одной прямой. 
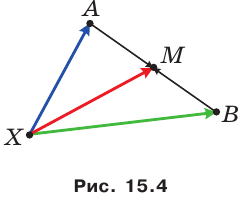
Пример №9
Точка  — середина отрезка
— середина отрезка  — произвольная точка (рис. 15.4). Докажите, что
— произвольная точка (рис. 15.4). Докажите, что 
Решение:
Применяя правило треугольника, запишем:
Сложим эти два равенства:

Поскольку векторы  противоположны, то
противоположны, то  Имеем:
Имеем: 
Отсюда 
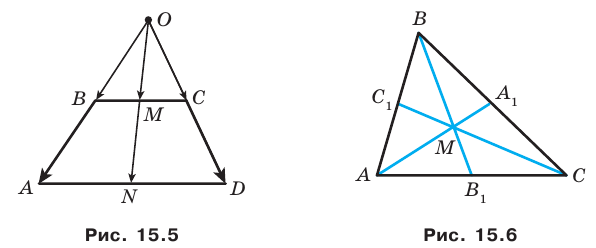
Пример №10
Докажите, что середины оснований трапеции и точка пересечения продолжение ее боковых сторон лежат на одной прямой.
Решение:
Пусть точки  — середины оснований
— середины оснований  и
и  трапеции
трапеции  — точка пересечения прямых
— точка пересечения прямых  (рис. 15.5).
(рис. 15.5).
Применяя ключевую задачу 2, запишем: 
Поскольку  где
где  —некоторые числа.
—некоторые числа.
Поскольку  Следовательно,
Следовательно, 
Имеем: 
Из ключевой задачи 1 следует, что точки  лежат на одной прямой.
лежат на одной прямой. 
Пример №11
Докажите, что если  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  то
то 
Решение:
Пусть отрезки  — медианы треугольника
— медианы треугольника  (рис. 15.6). Имеем:
(рис. 15.6). Имеем:
Отсюда 
Из свойства медиан треугольника следует, что 
Тогда  Аналогично
Аналогично 
Отсюда

Применение векторов
Применяя векторы к решению задач, часто используют следующую лемму.
Лемма. Пусть  — такая точка отрезка
— такая точка отрезка  что
что  (рис. 15.9). Тогда для любой точки
(рис. 15.9). Тогда для любой точки  выполняется равенство
выполняется равенство

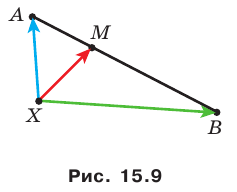
Доказательство: Имеем:

Поскольку  то
то
Запишем: 
Поскольку  то имеем:
то имеем:
Заметим, что эта лемма является обобщением ключевой задачи 2 п. 15.
Пример №12
Пусть  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  — произвольная точка (рис. 15.10). Докажите, что
— произвольная точка (рис. 15.10). Докажите, что

Решение:
Пусть точка  — середина отрезка
— середина отрезка  Имеем:
Имеем:  Тогда, используя лемму, можно записать:
Тогда, используя лемму, можно записать:

Докажем векторное равенство, связывающее две замечательные точки треугольника.
точки треугольника.
Теорема. Если точка  — ортоцентр треугольника
— ортоцентр треугольника  а точка
а точка  — центр его описанной окружности, то
— центр его описанной окружности, то

Доказательство: Для прямоугольного треугольника равенство  очевидно.
очевидно.
Пусть треугольник  не является прямоугольным. Опустим из точки
не является прямоугольным. Опустим из точки  перпендикуляр
перпендикуляр  на сторону
на сторону  треугольника
треугольника  (рис. 15.11). В курсе геометрии 8 класса было доказано, что
(рис. 15.11). В курсе геометрии 8 класса было доказано, что 
На луче  отметим точку
отметим точку  такую, что
такую, что  Тогда
Тогда  Поскольку
Поскольку  то четырехугольник
то четырехугольник  — параллелограмм.
— параллелограмм.
По правилу параллелограмма 
Поскольку точка  является серединой отрезка
является серединой отрезка  то в четырехугольнике
то в четырехугольнике  диагонали точкой пересечения делятся пополам.
диагонали точкой пересечения делятся пополам. 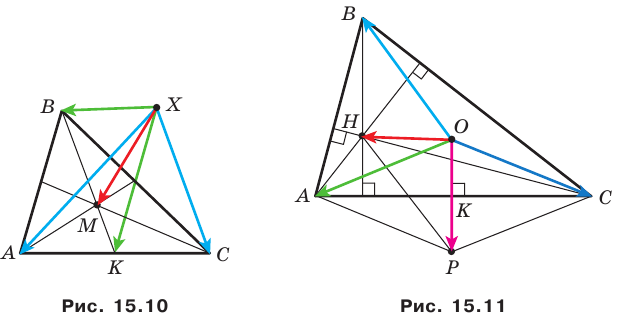
Следовательно, этот четырехугольник — параллелограмм. Отсюда 
Имеем: 
Обратимся к векторному равенству  где
где  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  Так как
Так как  — произвольная точка, то равенство остается справедливым, если в качестве точки
— произвольная точка, то равенство остается справедливым, если в качестве точки  выбрать точку
выбрать точку  — центр описанной окружности треугольника
— центр описанной окружности треугольника 
Имеем: 
Учитывая равенство  получаем:
получаем: 
Это равенство означает, что точки  лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
Скалярное произведение векторов
Пусть  — два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки
— два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  Величину угла
Величину угла  будем называть углом между векторами
будем называть углом между векторами  и
и 
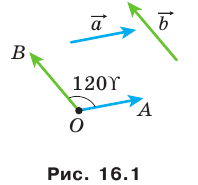
Угол между векторами  обозначают так:
обозначают так:  Например, на рисунке 16.1
Например, на рисунке 16.1  а на рисунке 16.2
а на рисунке 16.2 
Если векторы  сонаправлены, то считают, что
сонаправлены, то считают, что  Если хотя бы один из векторов
Если хотя бы один из векторов  нулевой, то так же считают, что
нулевой, то так же считают, что 
Следовательно, для любых векторов  имеет место неравенство:
имеет место неравенство:

Векторы  называют перпендикулярными, если угол между ними равен
называют перпендикулярными, если угол между ними равен  Пишут:
Пишут: 
Вы умеете складывать и вычитать векторы, умножать вектор на число. Также из курса физики вы знаете, что если под действием постоянной силы  тело переместилось из точки
тело переместилось из точки  в точку
в точку  (рис. 16.3), то совершенная механическая работа равна
(рис. 16.3), то совершенная механическая работа равна  где
где 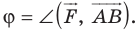
Изложенное выше подсказывает, что целесообразно ввести еще одно действие над векторами.
Определение. Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними. Скалярное произведение векторов  обозначают так:
обозначают так: 
Имеем:
Если хотя бы один из векторов  нулевой, то очевидно, что
нулевой, то очевидно, что 
Пусть 
Скалярное произведение  называют скалярным квадратом вектора
называют скалярным квадратом вектора  и обозначают
и обозначают 
Мы получили, что  то есть скалярный квадрат, вектора равен квадрату его модуля.
то есть скалярный квадрат, вектора равен квадрату его модуля.
Теорема 16.1. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Доказательство: Пусть  Докажем, что
Докажем, что 
Имеем:  Отсюда
Отсюда 
Пусть теперь  Докажем, что
Докажем, что 
Запишем:  Поскольку
Поскольку 
 Отсюда
Отсюда 
Теорема 16.2. Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле
Доказательство: Сначала рассмотрим случай, когда векторы  и
и  неколлинеарны.
неколлинеарны.
Отложим от начала координат векторы  соответственно равные векторам
соответственно равные векторам  (рис. 16.4). Тогда
(рис. 16.4). Тогда

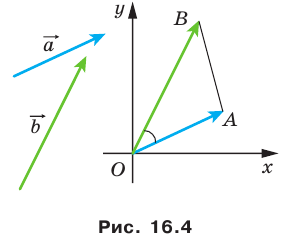
Применим теорему косинусов к треугольнику 

Отсюда 
Поскольку 
Кроме того,  Отсюда
Отсюда 
Имеем:  Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:
Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:

Упрощая выражение, записанное в правой части последнего равенства, получаем:
Рассмотрим случай, когда векторы  коллинеарны.
коллинеарны.
Если  то очевидно, что
то очевидно, что 
Если  то существует такое число
то существует такое число  то есть
то есть 
Если  Имеем:
Имеем:

Случай, когда  рассмотрите самостоятельно.
рассмотрите самостоятельно. 
Следствие. Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле
Доказательство: Из определения скалярного произведения векторов  следует, что
следует, что  Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу
Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу 
С помощью теоремы 16.2 легко доказать следующие свойства скалярного произведения векторов.
Для любых векторов  и любого числа
и любого числа  справедливы равенства:
справедливы равенства:
 — переместительное свойство;
— переместительное свойство;
 — сочетательное свойство;
— сочетательное свойство;
 — распределительное свойство.
— распределительное свойство.
Для доказательства этих свойств достаточно выразить через координаты векторов скалярные произведения, записанные в правых и левых частях равенств, и сравнить их. Сделайте это самостоятельно.
Эти свойства вместе со свойствами сложения векторов и умножения вектора на число позволяют преобразовывать выражения, содержащие скалярное произведение векторов, аналогично тому, как мы преобразовываем алгебраические выражения.
Например, 

Пример №13
С помощью векторов докажите, что диагонали ромба перпендикулярны.
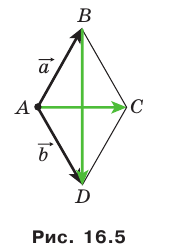
Решение:
На рисунке 16.5 изображен ромб  Пусть
Пусть  Очевидно, что
Очевидно, что  По правилу параллелограмма имеем:
По правилу параллелограмма имеем: 
Отсюда

Следовательно, 
Пример №14
Известно, что 
Найдите 
Решение:
Поскольку скалярный квадрат вектора равен квадрату его модуля, то  Отсюда
Отсюда
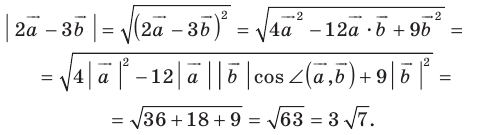
Ответ: 
Пример №15
В треугольнике  известно, что
известно, что  Найдите медиану
Найдите медиану 
Решение. Применяя ключевую задачу 2 п. 15, запишем:  (рис. 16.6).
(рис. 16.6).
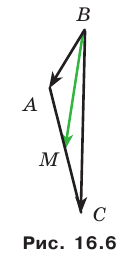
Отсюда:
Следовательно, 
Ответ: 
Справочный материал
Вектор
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Коллинеарные векторы
Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
Равные векторы
Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны. Равные векторы имеют равные соответствующие координаты. Если соответствующие координаты векторов равны, то равны и сами векторы.
Координаты вектора
Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Модуль вектора
Если вектор  имеет координаты
имеет координаты 
Правила сложения двух векторов
Правило треугольника
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  а от точки
а от точки  — вектор
— вектор  равный вектору
равный вектору  Вектор
Вектор  — сумма векторов
— сумма векторов  Для любых трех точек
Для любых трех точек  выполняется равенство
выполняется равенство 
Правило параллелограмма
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  Тогда вектор
Тогда вектор  — сумма векторов
— сумма векторов 
Координаты суммы векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Свойства сложения векторов
Для любых векторов  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство.
— сочетательное свойство.
Разность векторов
Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Для любых трех точек  выполняется равенство
выполняется равенство 
Координаты разности векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Противоположные векторы
Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены. Для любых точек  выполняется равенство
выполняется равенство 
Умножение вектора на число
Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если 
Если  то считают, что
то считают, что 
Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Свойства коллинеарных векторов
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Свойства умножения вектора на число
Для любых чисел  и любых векторов
и любых векторов  справедливы равенства:
справедливы равенства:
 — сочетательное свойство;
— сочетательное свойство; — первое распределительное свойство;
— первое распределительное свойство; — второе распределительное свойство.
— второе распределительное свойство.
Скалярное произведение векторов
Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними:
 Скалярное произведение векторов
Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле 
Свойства скалярного произведения
Для любых векторов  и любого числа
и любого числа  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство;
— сочетательное свойство; — распределительное свойство.
— распределительное свойство.
Условие перпендикулярности двух векторов
Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Косинус угла между двумя векторами
Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле 
Векторы в аналитической геометрии
Понятие вектора широко применяется в экономике, математике, физике и других науках, при этом одинаково широко используется как алгебраическая концепция изложения векторного анализа, так и его геометрическая интерпретация, в рамках которой различаются величины двух видов: скалярные и векторные.
Скалярной величиной или скаляром называется величина, которая полностью определяется одним числом, выражающим отношение этой величины к соответствующей единице измерения, например, цена, количество проданного товара, стоимость и т.д.
Векторной величиной или вектором называется величина, для задания которой кроме численного значения необходимо указать и ее направление в пространстве, например, изменение темпов производства (рост или падение), колебание курса акций на бирже и т.д.
Векторная величина графически обычно изображается как связанный вектор или направленный отрезок, т.е. отрезок прямой, у которого указано, какая из ограничивающих точек является его началом, а какая концом. Но в отличие от направленного отрезка, для описания которого необходимо указать начальную точку, длину и направление, свободный вектор или просто вектор представляет собой множество всех эквивалентных между собой связанных векторов и вполне характеризуется:
- направлением;
- длиной (модулем).
Для задания такого множества достаточно указать какой-либо один из связанных векторов этого множества – представитель вектора, в качестве которого обычно выбирается связанный вектор с началом, совпадающим с началом координат.
Вектор обозначается одной маленькой буквой со стрелкой сверху, например,  или двумя буквами со стрелкой
или двумя буквами со стрелкой  , где точка А есть начало вектора (его точка приложения), а В – его конец.
, где точка А есть начало вектора (его точка приложения), а В – его конец.
Длина вектора называется его модулем, обозначается или
или 
и равна длине любого его представителя, т.е. расстоянию между начальной и конечной точками связного вектора . Вектор, длина которого равна нулю, называется нуль-вектором и обозначается  .
.
Два вектора называются равными, если:
- равны их длины;
- они параллельны;
- они направлены в одну сторону.
Иными словами, равные векторы получаются один из другого параллельным переносом в пространстве.
Векторы называются коллинеарными, если они расположены на одной или на параллельных прямых, и компланарными, если они лежат на одной или на параллельных плоскостях.
Вектор, длина которого равна единице, называется единичным вектором или ортом. Орт обозначатся  .
.
Линейные операции над векторами
Сложение вектора производится по правилу параллелограмма:
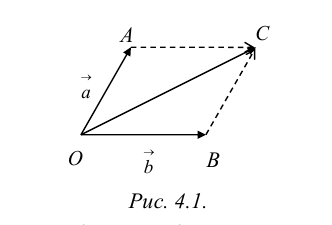
Поскольку вектор  равен
равен  , то можно дать другое правило нахождения суммы
, то можно дать другое правило нахождения суммы  (правило треугольника): суммой векторов
(правило треугольника): суммой векторов  является вектор, идущий из начала
является вектор, идущий из начала  в конец если вектор приложен к концу вектора
в конец если вектор приложен к концу вектора  , т.е.:
, т.е.:
 (4-1)
(4-1)
Это правило распространяется на любое число слагаемых: если векторы  образуют ломаную OAB…KL, то суммой этих векторов является вектор
образуют ломаную OAB…KL, то суммой этих векторов является вектор  , замыкающий эту ломаную, т.е.:
, замыкающий эту ломаную, т.е.:
 (4-2)
(4-2)
В частности, если ломаная замыкается, т.е. O = L, то сумма ее звеньев равна нуль-вектору  .
.
Сложение векторов подчиняется обычным законам сложения -сочетательному и переместительному, а также обладает обратной операцией – вычитанием.
Разностью двух векторов , отложенных от одной точки О является вектор, направленный из конца вычитаемого вектора в конец уменьшаемого вектора , т.е.  (Рис. 4.2.). Это правило следует из формулы (1): т.к.
(Рис. 4.2.). Это правило следует из формулы (1): т.к.  .
.
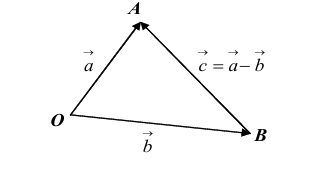 Рис. 4.2.
Рис. 4.2.
Векторы можно не только складывать и вычитать, но и умножать на числа (скаляры).
Вектор  равен
равен  , где
, где  – некоторое число, если:
– некоторое число, если:
 коллинеарен ;
коллинеарен ;- длина вектора отличается от длины вектора в
 раз, т.е.
раз, т.е. 
- при
 направлены в одну сторону, при
направлены в одну сторону, при  – в разные.
– в разные.
Произведение вектора на скаляр обладает следующими свойствами:
Проекция вектора на ось
Пусть даны ось и вектор
и вектор  . Проектируя начало и конец вектора на ось получим на ней вектор
. Проектируя начало и конец вектора на ось получим на ней вектор  . Проекцией
. Проекцией вектора
вектора  на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
Проекция вектора на ось (: обозначается ).
Свойства проекций:
 – угол между вектором
– угол между вектором  и осью
и осью  ;
;
Пусть – произвольная конечная система векторов;
– произвольная конечная система векторов;  произвольная система действительных чисел.
произвольная система действительных чисел.
Вектор  называется линейной комбинацией векторов этой системы.
называется линейной комбинацией векторов этой системы.
Из свойства проекций следует, что:

Линейная зависимость векторов
Говорят, что векторы линейно независимы, если из равенства:
 (4-3)
(4-3)
следует, что  .
.
В противном случае векторы  , называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде
, называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде  как, то говорят, что вектор
как, то говорят, что вектор  линейно выражается через векторы
линейно выражается через векторы  .
.
Теорема. Векторы  линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
Следствие. Если векторы линейно независимы, то ни один из них нельзя выразить через остальные; в частности , ни один из них не может быть нулевым.
Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой. Любые два неколлинеарных вектора  линейно независимы. В самом деле, предположим, неколлинсарные векторы
линейно независимы. В самом деле, предположим, неколлинсарные векторы  линейно зависимы. Тогда, по предыдущей теореме, один из них, например
линейно зависимы. Тогда, по предыдущей теореме, один из них, например ? линейно выражается через второй, т.е.
? линейно выражается через второй, т.е.  , а это противоречит неколлинеарности . Следовательно, – линейно независимы.
, а это противоречит неколлинеарности . Следовательно, – линейно независимы.
Пусть неколлинеарные векторы,  – произвольный вектор компланарный векторам . Отложим векторы
– произвольный вектор компланарный векторам . Отложим векторы  и от одной точки О, т.е. построим
и от одной точки О, т.е. построим (Рис.4.3).
(Рис.4.3).
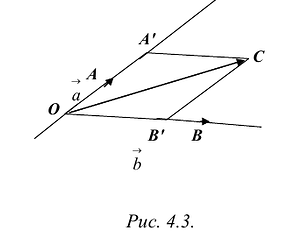
Из параллелограмма  видно, что:
видно, что:

Следовательно, любые три компланарных вектора  линейно зависимы.
линейно зависимы.
Любые три некомпланарных вектора  линейно независимы.
линейно независимы.
Если предположить, что три некомпланарных вектора  линейно зависимы, то один из них, например , линейно выражается через , т.е.
линейно зависимы, то один из них, например , линейно выражается через , т.е.  а это говорит о том, что три вектора
а это говорит о том, что три вектора  лежат в одной плоскости, что противоречит условию.
лежат в одной плоскости, что противоречит условию.
Три вектора линейно зависимы тогда и только тогда, когда определитель, составленный из их координат, равен нулю.
Пусть векторы в некотором базисе имеют координаты
 соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа
соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа  , неравные одновременно нулю, что выполняется равенство:
, неравные одновременно нулю, что выполняется равенство:

Линейная зависимость означает, что существует ненулевой набор коэффициентов  такой, что:
такой, что:
 4)
4)
Если один из векторов, например,  ,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при
,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при  .
.
Теорема, Векторы линейно зависимы тогда и только тогда, когда один из векторов является линейной комбинацией остальных.
Базис. Координаты вектора в базисе
Определим понятие базиса на прямой, плоскости и в пространстве.
Базисом на прямой называется любой ненулевой вектор на
на
этой прямой. Любой другой вектор  , коллинеарный данной прямой,
, коллинеарный данной прямой,
может быть выражен через вектор в виде  .
.
Базисом на плоскости называются любых два линейно независимых вектора  этой плоскости, взятые в определенном порядке. Любой третий вектор
этой плоскости, взятые в определенном порядке. Любой третий вектор  , компланарный плоскости, на которой выбран базис
, компланарный плоскости, на которой выбран базис  , может быть представлен в виде
, может быть представлен в виде  .
.
Базисом в трехмерном пространстве называются любые три некомпланарных вектора  взятые в определенном порядке. Такой базис обозначается
взятые в определенном порядке. Такой базис обозначается  . Пусть – произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа
. Пусть – произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа  такие, что:
такие, что:
 (4.5)
(4.5)
Коэффициенты называются координатами вектора в базисе , а формула (4.5) есть разложение вектора с по данному базису.
Координаты вектора в заданном базисе определяются однозначно. Введение координат для векторов позволяет сводить различные соотношения между векторами к числовым соотношениям между их координатами. Координаты линейной комбинации векторов равны таким же линейным комбинациям соответствующих координат этих векторов.
Декартовы прямоугольные координаты в пространстве. Координаты точек. Координаты векторов. Деление отрезка в данном отношении
Декартова прямоугольная система координат в пространстве определяется заданием единицы масштаба для измерения длин и трех пересекающихся в точке взаимно перпендикулярных осей, первая из которых называется осью абсцисс (Ох), вторая – осью ординат (Оу), третья – осью аппликат (Oz); точка О – начало координат (Рис. 4.4).
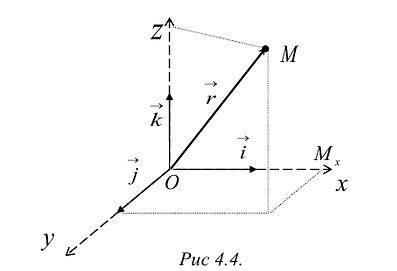
Положение координат осей можно задать с помощью единичных векторов  направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис
направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис  в трехмерном пространстве.
в трехмерном пространстве.
Пусть в пространстве дана точка М. Проектируя ее на ось Ох, получим точку Мх. Первой координатой х или абсциссой точки М называется длина вектора  , взятая со знаком плюс, если
, взятая со знаком плюс, если  направлен в ту же сторону, что и вектор
направлен в ту же сторону, что и вектор  , и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
, и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
Система координат называется правой, если вращение от оси Ох к оси Оу в ближайшую сторону видно с положительного направления оси Oz совершающимися против часовой стрелки, и левой, если вращение от оси Ох к оси Оу в ближайшую сторону видно совершающимися по часовой стрелке.
Вектор  , направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
, направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
 (4.6)
(4.6)
Если даны координаты точек  , то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или
, то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или  .
.
Следовательно, по формуле (4.5):
При сложении (вычитании) векторов их координаты складываются (вычитаются), при умножении вектора на число все его координаты умножаются на это число.
Длина вектора  равна квадратному корню из суммы квадратов его координат.
равна квадратному корню из суммы квадратов его координат.
 (4.8)
(4.8)
Длина вектора , заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
, заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
 (4.9)
(4.9)
Если  коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
 (4.10)
(4.10)
Пусть точка М(х, у, z) делит отрезок между точками  и
и  в отношении
в отношении  , тогда радиус-вектор точки М выражается через радиусы-векторы
, тогда радиус-вектор точки М выражается через радиусы-векторы  его концов по формуле:
его концов по формуле:
Отсюда получаются координатные формулы:

В частности, если точка М делит отрезок  пополам, то
пополам, то

Направляющие косинусы
Пусть дан вектор  . Единичный вектор того же направления, что и
. Единичный вектор того же направления, что и  (орт вектора
(орт вектора  ) находится по формуле:
) находится по формуле:
Пусть ось  образует с осями координат углы
образует с осями координат углы . Направляющими косинусами оси называются косинусы этих углов:
. Направляющими косинусами оси называются косинусы этих углов:  . Если направление задано единичным вектором
. Если направление задано единичным вектором  , то направляющие косинусы служат его координатами, т.е.:
, то направляющие косинусы служат его координатами, т.е.:

Направляющие косинусы связаны между собой соотношением: 
Если направление задано произвольным вектором , то находят орт этого вектора и, сравнивая его с выражением для единичного вектора , получают:
Скалярное произведение
Скалярными произведением  двух векторов
двух векторов  называется число, равное произведению их длин на косинус угла между ними
называется число, равное произведению их длин на косинус угла между ними 
Скалярное произведение обладает следующими свойствами:
4. Если – ненулевые векторы, то  тогда и только тогда, когда эти векторы перпендикулярны. Если
тогда и только тогда, когда эти векторы перпендикулярны. Если  , то угол между а и Ь– острый, если
, то угол между а и Ь– острый, если  , то угол – тупой;
, то угол – тупой;
5. Скалярный квадрат вектора а равен квадрату его длины, т.е.
Следовательно, 
Геометрический смысл скалярного произведения: скалярное произведение вектора на единичный вектор  равно проекции вектора
равно проекции вектора  на направление, определяемое
на направление, определяемое  , т.е.
, т.е.  .
.
Из определения скалярного произведения вытекает следующая таблица умножения ортов  :
:
Если векторы заданы своими координатами  и
и
 , то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения
, то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения  через координаты векторов:
через координаты векторов:
Векторное произведение
Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  длина и направление которого определяется условиями:
длина и направление которого определяется условиями:


3. направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Векторное произведение обладает следующими свойствами:  4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности
4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности для любого вектора ;
для любого вектора ;
5. Если неколлинеарны, то модуль векторного произведения равен площади параллелограмма S построенного на этих векторах, как на сторонах.
Из первых трех свойств следует, что векторное умножение суммы векторов на сумму векторов подчиняется обычным правилам перемножения многочленов. Надо только следить за тем, чтобы порядок следования множителей не менялся.
Основные орты перемножаются следующим образом: 
Если , то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
, то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
Если принять во внимание полученные выше правила перемножения ортов, то:
 (4.11)
(4.11)
Более компактную форму записи выражения для вычисления координат векторного произведения двух векторов можно построить, если ввести понятие определителя матрицы.
Рассмотрим частный случай, когда вектора  принадлежат плоскости Оху, т.е. их можно представить как
принадлежат плоскости Оху, т.е. их можно представить как и
и 
Если координаты векторов записать в виде таблицы следующим образом:  , то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали:
, то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали: 
В таком случае: 
Абсолютная величина определителя, таким образом, равна площади параллелограмма, построенного на векторах  , как на сторонах.
, как на сторонах.
Если сравнить это выражение с формулой векторного произведения (4.7), то:  (4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
(4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
Определитель матрицы третьего порядка вычисляется следующим образом:
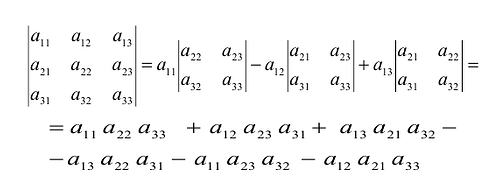
и представляет собой алгебраическую сумму шести слагаемых.
Формулу для вычисления определителя матрицы третьего порядка легко запомнить, если воспользоваться правилом Саррюса, которое формулируется следующим образом:
- Каждое слагаемое является произведением трех элементов, расположенных в разных столбцах и разных строках матрицы;
- Знак “плюс” имеют произведения элементов, образующих треугольники со стороной, параллельной главной диагонали;
- Знак “минус” имеют произведения элементов, принадлежащих побочной диагонали, и два произведения элементов, образующих треугольники со стороной, параллельной побочной диагонали.
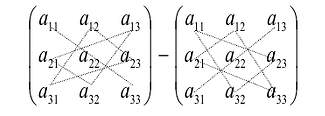
Смешанное произведение
Смешанным произведением тройки векторов  называется число, равное скалярному произведению вектора
называется число, равное скалярному произведению вектора  на векторное произведение
на векторное произведение 
Если рассматриваемые векторы  некомпланарны, то векторное произведение
некомпланарны, то векторное произведение  есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов
есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов  , и его высоты, т.е. объему этого параллелепипеда.
, и его высоты, т.е. объему этого параллелепипеда.
Таким образом, смешанное произведение векторов 
(которое обозначается есть число, абсолютная величина которого выражает объем параллелепипеда, построенного па векторах .
Знак произведение положителен, если векторы, образуют правую тройку векторов, т.е. вектор  направлен так, что кратчайший поворот от
направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Из геометрического смысла смешанного произведения непосредственно следует необходимое и достаточное условие некомпланарности векторов : для того, чтобы векторы были некомпланарными необходимо и достаточно, чтобы их сметанное произведение было отлично от нуля.
Если  и
и  то:
то:

или в свернутой форме:
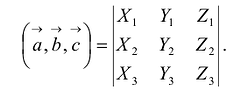
Справедливы следующие свойства сметанного произведения векторов:
- Смешанное произведение не меняется при циклической перестановке его сомножителей
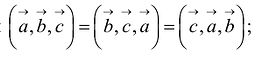
- При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный

Векторы в высшей математике
Определение вектора:
На начальной стадии, когда приходится прибегать к математическим методам исследования, необходимо разработать удобное средство организации исходных данных. Таким простейшим средством является вектор. Например, еженедельное изменение цены за месяц на некоторый товар удобно записать в виде массива: (5500; 5700; 6000; 6200). Записанный таким образом массив чисел называют вектором.
Алгебраические операции над векторами и их свойства
Введём теперь математическое определение векторов и алгебраические операции над ними.
Упорядоченную совокупность действительных чисел назовём вектором и обозначим
назовём вектором и обозначим  , т.е
, т.е  . Действительные числа
. Действительные числа  будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается
будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается  . Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:
. Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:

С геометрической точки зрения, вектор – это направленный отрезок. Поэтому вектор, длина которого равна единице, также называется единичным вектором.
Определим далее линейные операции над векторами: сложение и умножение вектора на число.
Сложение векторов
Пусть даны два вектора
 . Суммой двух векторов
. Суммой двух векторов  и
и
 назовем вектор
назовем вектор  , координаты которого равны суммам соответствующих координат векторов
, координаты которого равны суммам соответствующих координат векторов  :
:

Пусть дан вектор  . Обозначим через –
. Обозначим через – вектор, порождённый вектором
вектор, порождённый вектором  , такой, что
, такой, что  .
.
Сложение векторов обладает следующими свойствами:
- Для любых двух векторов
 существует единственный вектор
существует единственный вектор  , называемый суммой векторов
, называемый суммой векторов  .
. - Для любых
 .
. - Для любых
 .
. - Существует единственный вектор
 , называемый нулевым вектором, такой, что
, называемый нулевым вектором, такой, что  для всех
для всех  .
. - Для любого вектора
 существует единственный вектор
существует единственный вектор  , такой, что
, такой, что  . Вектор
. Вектор  называется вектором, противоположным вектору
называется вектором, противоположным вектору 
Из указанных свойств векторов следует, что можно рассматривать сумму любого конечного числа векторов  .
.
Умножение вектора на число
Пусть  и
и
 . Произведение вектора
. Произведение вектора  на число
на число  – это вектор, обозначаемый,
– это вектор, обозначаемый,  полученный умножением координат вектора
полученный умножением координат вектора  на число
на число  :
:
 .
.
Положим,  для любого вектора
для любого вектора  для любого числа
для любого числа  .
.
Умножение вектора на число обладает следующими свойствами:
- Для любого вектора
 и любого числа
и любого числа  существует единственный вектор
существует единственный вектор  .
.  для любых чисел
для любых чисел  и любого
и любого .
. для любых чисел
для любых чисел  и любого .
и любого . для любых чисел
для любых чисел  и любого
и любого  .
. для любого
для любого  .
.
Выражение  где
где  – вскто-ры, а
– вскто-ры, а  – любые действительные числа, называется ли-нейиой комбинацией векторов
– любые действительные числа, называется ли-нейиой комбинацией векторов  с коэффициентами
с коэффициентами  . Линейная комбинация векторов-это вектор. Вектор
. Линейная комбинация векторов-это вектор. Вектор  представленный в виде
представленный в виде  будем называть транспонированным по отношению к вектору
будем называть транспонированным по отношению к вектору  и обозначать
и обозначать  .
.
Замечание. Зная координаты вектора  , можно вычислить его длину по формуле
, можно вычислить его длину по формуле
 .
.
Пример №16
Найти линейную комбинацию  векторов
векторов  .
.
Решение:
Воспользуемся определением линейной комбинации векторов и операций над векторами. Тогда получим вектор вида:

Скалярное произведение векторов и его свойства
Предположим, что объем продаж трёх видов товаров фирмы  в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:
в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:  ден.ед. Представим данные о продажах с помощью вектора:
ден.ед. Представим данные о продажах с помощью вектора:  , а соответствующие цены с помощью вектора
, а соответствующие цены с помощью вектора  . Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора
. Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора  на соответствующие элементы вектора
на соответствующие элементы вектора  :
: .
.
Приведенный пример помогает уяснить общую методику введения скалярного произведения векторов.
Определепие2.2.1. Скалярным произведением векторов  называется число, обозначаемое
называется число, обозначаемое  , равное сумме произведений соответствующих коорди-. пат векторов
, равное сумме произведений соответствующих коорди-. пат векторов  :
:

Это определение можно применять только в тех случаях, когда векторы  содержат одинаковое количество координат; в противном случае скалярное произведение
содержат одинаковое количество координат; в противном случае скалярное произведение  не может быть определено.
не может быть определено.
Укажем некоторые свойства скалярного произведения:
 ;
; ;
; ;
; .
.
Два ненулевых вектора  называются ортогональными, если их скалярное произведение равно нулю, т.е.
называются ортогональными, если их скалярное произведение равно нулю, т.е.

Рассмотрим систему n ненулевых векторов  . Если
. Если
скалярное произведение каждого вектора на себя равно единице, а скалярное произведение различных векторов равно нулю, т.е.

то система векторов  называется ортоиормированной. Условия (1.3) можно записать в координатной форме:
называется ортоиормированной. Условия (1.3) можно записать в координатной форме:

где  .
.
Пример №17
Найти вектор  коллинеарный1 вектору
коллинеарный1 вектору  и удовлетворяющий условию
и удовлетворяющий условию  .
.
Решение:
Так как вектор  коллинеарный вектору
коллинеарный вектору  , то его координаты пропорциональны координатам вектора
, то его координаты пропорциональны координатам вектора  , т.е.
, т.е.
 . Воспользовавшись определением скалярного произведения, составим равенство:
. Воспользовавшись определением скалярного произведения, составим равенство:  .
.
Откуда следует, что  . Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
. Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
Пример №18
Пусть рассматривается проект вложения капитала на четыре года. Этот проект должен обеспечивать следующую денежную выручку: в первый год- 1000 дсн.ед.; во второй – 3000 дсн.ед.; в третий – 10000 ден.ед.; в четвёртый – 15000 дсн.ед. Проект будет принят в том случае, если совокупный доход от капиталовложений (в пересчёте на сегодняшний доход) будет превышать требующиеся затраты, составляющие 17000 дсн.ед. Дисконтирование ожидаемого дохода проводится по годовой ставке равной 10%. Будет ли принят рассматриваемый проект?
Решение:
При ставке дисконтирования 10% годовых, доход, который будет получен на протяжении первого года, должен быть умножен на  , на протяжении второго года- на
, на протяжении второго года- на  , на протяжении третьего года- на 0,7513 =
, на протяжении третьего года- на 0,7513 = и на протяжении четвёртого года- на 0,6838 =
и на протяжении четвёртого года- на 0,6838 = .
.
1. Вектор  называется коллинеарным вектору
называется коллинеарным вектору  , если при совмещении их начальных точек они располагаются на одной прямой.
, если при совмещении их начальных точек они располагаются на одной прямой.
Запишем денежную выручку и дисконтирующие множители в векторной форме:

и
 .
.
Скалярное произведение векторов  и
и  —
—  —определяет дисконтированный совокупный доход за четыре года:
—определяет дисконтированный совокупный доход за четыре года: 
Так как 21158,3>17000, то рассматриваемый проект вложения капитала будет принят.
Операции над векторами в высшей математике
Внимание! Вектор определяется числом и направлением.
Отрезком АВ называется множество точек, заключенных между точками
А и В, включая их. Точки А и В называются концами отрезка.
Отрезок АВ называется направленным, если его концы упорядочены.
Направленный отрезок с началом в точке А и концом в точке В будем обозначать АВ. Направленный отрезок ВА с началом в точке В и концом в точке А называется противоположно направленным отрезку АВ.
Модулем  направленного отрезка АВ называется его длина.
направленного отрезка АВ называется его длина.
Вектором называется класс направленных отрезков, расположенных на параллельных или совпадающих прямых и имеющих одинаковые направление и длину.
Векторы геометрически изображают направленными отрезками и обозначаются  и буквами жирного шрифта
и буквами жирного шрифта 

Вывод. Вектор однозначно определяется своим одним направленным отрезком. Пусть заданы два вектора  и
и  (рис.1). Суммой векторов а и b
(рис.1). Суммой векторов а и b
называется вектор, проведенный из начала а к концу b: 
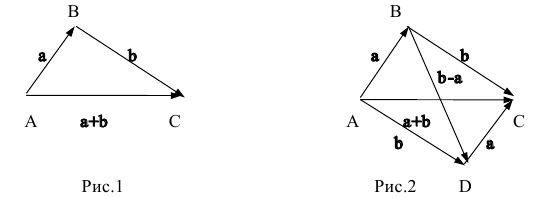
Способ сложения векторов, показанный на рис.1, называется правилом треугольника.
Замечание. На векторах а и b можно построить параллелограмм, в котором одна диагональ будет их суммой:  , а вторая – разностью:
, а вторая – разностью:  Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Множество всех нулевых отрезков называется нулевым вектором и обозначается 0. Направление нулевого вектора произвольно.
Вектор, длина которого равна единице, называется единичным.
Для любого вектора а верны равенства:

Произведением вектора а на число  отличное от нуля, называется вектор, обозначаемый
отличное от нуля, называется вектор, обозначаемый  и удовлетворяющий следующим условиям:
и удовлетворяющий следующим условиям:
- длина вектора
 равна длине вектора а, умноженного на модуль числа
равна длине вектора а, умноженного на модуль числа
- векторы а и одинаково направлены, если
 , и противоположно направлены, если
, и противоположно направлены, если  (рис.З).
(рис.З).
Произведение вектора на число «нуль» есть нулевой вектор. 
Углом между двумя векторами а и b называется наименьший угол  на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
Проекцией вектора а на вектор b называется длина вектора а, умноженная на косинус угла между векторами а и b (рис.4):

Внимание! Для ненулевых векторов возможны три варианта произведений: скалярное произведение (в ответе получается число), векторное произведение (в ответе получается вектор) и смешанное произведение (в ответе получается число).
Скалярным произведением двух ненулевых векторов а и b называется число, равное произведению длин этих векторов на косинус угла между ними. Обозначение:  Таким образом,
Таким образом,

Например, для скалярного квадрата ii, где i -единичный вектор, имеем 
Векторным произведением двух ненулевых векторов а и b называется такой вектор  что
что
- 1) его модуль равен площади параллелограмма, построенного на данных векторах, т.е.

- 2) он перпендикулярен плоскости построенного на данных векторах параллелограмма, , т.е.

- 3) векторы
 образуют правую тройку векторов, т.е. при наблюдении из конца вектора
образуют правую тройку векторов, т.е. при наблюдении из конца вектора  кратчайший поворот от а к b виден против часовой стрелки.
кратчайший поворот от а к b виден против часовой стрелки.
Пример №19
Найти площадь параллелограмма, построенного на векторах а и b. если а – единичный вектор, длина вектора b равна трем, а их скалярное произведение – двум.
Решение:
Площадь параллелограмма, построенного на векторах а и b, равна 
 .
.
По условию задачи имеем 
Найдем синус угла между векторами а и b. Так как  то
то 
Следовательно, 
Подставим найденное значение в формулу и получим:  Задача решена.
Задача решена.
Смешанным произведением трех ненулевых векторов а, b и с называется число, равное скалярному произведению векторного произведения первых двух векторов а и b на третий вектор  . Обозначение:
. Обозначение: 
Замечание. Смешанное произведение не меняется при циклической перестановке его сомножителей. При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный, т.е. 
Геометрический смысл смешанного произведения. Модуль смешанного произведения трех векторов равен объему параллелепипеда, построенного на этих векторах.
Действительно,
 где S – площадь основания параллелепипеда, H – высота параллелепипеда, V -объем параллелепипеда.
где S – площадь основания параллелепипеда, H – высота параллелепипеда, V -объем параллелепипеда.
Два вектора называются ортогональными, если угол между ними равен 
Необходимое и достаточное условие ортогональности:
Два ненулевых вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю  Нулевой вектор ортогонален любому вектору.
Нулевой вектор ортогонален любому вектору.
Два вектора называются коллинеарными, если они лежат на одной прямой. Пулевой вектор коллинеарен любому вектору.
Необходимое и достаточное условие коллинеарности:
- Два ненулевых вектора а и b коллинеарны тогда и только тогда, когда они пропорциональны, т.е.
 – произвольное число, отличное от нуля.
– произвольное число, отличное от нуля. - Два ненулевых вектора коллинеарны тогда и только тогда, когда их векторное произведение равно нулевому вектору (площадь параллелограмма равна нулю).
Три вектора называются компланарными, если они лежат на одной плоскости. Любую тройку векторов, содержащую нулевой вектор, считают компланарной.
Необходимое и достаточное условие компланарности. Три ненулевых вектора компланарны тогда и только тогда, когда их смешанное произведение равно нулю (объем параллелепипеда равен нулю).
Действия над векторами, заданными прямоугольными координатами
Пусть Ох, Оу, Oz – три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начала координат) и образующие правую тройку (рис. 5).
Точка М с координатами х, у, z обозначается M(x,y,z), причем первая координата называется абсциссой, вторая – ординатой, третья – аппликатой точки М.
Для каждой точки М пространства существует ее радиус-вектор r=ОМ, начало которого есть начало координат О и конец которого есть данная точка М. Координаты x,y,z точки М являются проекциями радиус-вектора r на оси Ох, Оу, Oz соответственно.
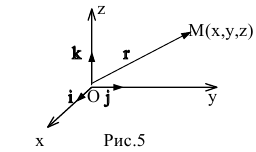 Пусть в прямоугольной системе координат заданы точки
Пусть в прямоугольной системе координат заданы точки  и
и  Тогда координаты вектора АВ вычисляются по формуле:
Тогда координаты вектора АВ вычисляются по формуле:

(«от координат конца отнимают координаты начала»).
Например, координаты радиус-вектора 
Если ввести единичные векторы i,j, k, направленные по осям Ох, Оу, Oz соответственно (рис.5), то координаты вектора r можно записать в эквивалентной форме:

Векторы i, j,k называются базисными.
Пусть даны два вектора 
Сложив векторы почленно, получим: 
или

Умножив вектор а на число  получим:
получим:

или

Пример №20
Найти вектор х из уравнения

Решение:
Выразим х из векторного уравнения:

Подставим векторы а, b и с в полученное выражение:
Задача решена.
Скалярное произведение двух векторов в координатной форме вычисляется по формуле:

Для cкалярного квадрата аа получаем: 
но, с другой стороны,  Следовательно,
Следовательно,
Мы получили формулу вычисления длины вектора, заданного в координатной форме.
Векторное произведение двух векторов в координатной форме вычисляется по формуле

которую можно выразить через символический определитель третьего порядка 
Смешанное произведение трех векторов в координатной форме  определяется формулой
определяется формулой 
- Заказать решение задач по высшей математике
Пример №21
Вершины треугольной пирамиды находятся в точках А( 1,1 ,-1), В(2,1,-3), С(-1,1,1), D(0,7,3). Вычислить высоту пирамиды, опущенную из вершины D на основание АВС.
Решение:
Высоту треугольной пирамиды найдем из формулы:
где  – объем пирамиды ABCD,
– объем пирамиды ABCD,  – площадь основания АВС, H – высота пирамиды, опущенная из вершины D.
– площадь основания АВС, H – высота пирамиды, опущенная из вершины D.
Найдем площадь треугольника АВС. Она равна половине площади параллелограмма, построенного, например, на векторах АВ и АС. Следовательно, по определению векторного произведения
 По координатам точек А, В и С найдем координаты векторов АВ и АС:
По координатам точек А, В и С найдем координаты векторов АВ и АС:
Векторное произведение АВ и АС в координатной форме равно 
Найдем объем треугольной пирамиды. Он равен одной шестой объема параллелепипеда, построенного, например, на векторах АВ, АС и AD. Тогда по геометрическому смыслу смешанного произведения  Найдем координаты вектора AD:
Найдем координаты вектора AD:

Смешанное произведение АВ, АС и AD в координатной форме равно  разложим определитель по второму столбцу
разложим определитель по второму столбцу

Задача решена.
Замечание.
- 1. Площадь треугольника АВС можно находить из площади параллелограмма, построенного на любых двух векторах, исходящих из одной вершины, например: АВ и АС; ВА и ВС; СА и СВ.
- 2. Объем треугольной пирамиды ABCD можно находить из объема параллелепипеда, построенного на любых трех векторах, исходящих из одной точки, например: АВ, АС и AD; ВА, ВС и BD; СА, СВ и CD; DA, DB и DC.
Линейное пространство
Идея линейности является одним из важнейших принципов математики. На этой основе построены различные разделы математики. Более того, почти каждый экономический процесс в малом является линейным, что позволяет делать о нём достаточно точные выводы, изучая линейный, гораздо более простой для исследования объект.
В математике часто приходится встречаться с объектами, для которых определены операции сложения и умножения на числа. Объектами такого рода являются векторы, функции, матрицы и т.д. Для того, чтобы изучать все такие объекты с единой точки зрения и вводится понятие линейного пространства.
Определение 2.3.1. Множество L элементов х, у, z,… называется линейным пространством, если:
При этом введенные операции должны удовлетворять следующим требованиям (аксиомам):
- х+у = у+х (коммутативности);
- (х+у)+ z = x+(y+z) (ассоциативности);
- существует элемент 0, такой, что х+0=х для любого х. Элемент 0 называется нулевым элементом;
- для каждого х существует противоположный элемент, обозначаемый -х, такой, что х+(-х)=0;
 ;
; ;
; :;
:; ,
,
где  и
и  – вещественные числа.
– вещественные числа.
В определении линейного пространства не говорится, как определяются операции сложения и умножения на числа, и не говорится о природе объектов. Требуется только, чтобы были выполнены сформулированные выше аксиомы. Поэтому всякий раз, когда мы встречаемся с операциями, удовлетворяющими этим условиям, будем считать их операциями сложения и умножения.
Рассмотрим систему векторов на плоскости и в трёхмерном пространстве, для которых определены операции сложения векторов и умножения вектора на число как в п.2.1. Так как для этих операций выполняются свойства (1) – (8) определения 2.3.1, то они образуют линейное пространство.
Линейное пространство образует и совокупность многочленов степени не выше п с вещественными коэффициентами, для которых определены обычные операции сложения многочленов и умножения многочлена на число.
Линейное пространство, в котором введено скалярное произведение, называется евклидовым.
Пространство, где векторами являются наборы из n действительных чисел с покомпонентными операциями сложения и умножения их на число, и скалярное произведение определяется по формуле (1.2.1), является евклидовым пространством. Это пространство обозначается  .
.
Линейно зависимые и линейно независимые векторы. Свойства линейной зависимости векторов.
Определение линейной комбинации векторов, тесно связано с понятием подпространства векторного пространства.
Определение 2.4.1. Некоторое непустое подмножество векторного пространства М называется подпространством, если оно само является векторным пространством.
А доказательство того, что подмножество является векторным пространством, проводится на основании доказательства того, что всякая линейная комбинация любых двух векторов этого подмножества, также является вектором этого подмножества.
Определение 2.4.2. Векторы  из
из  называются линейно независимыми, если не существует чисел
называются линейно независимыми, если не существует чисел  хотя бы одно из которых отлично от нуля, таких, что
хотя бы одно из которых отлично от нуля, таких, что 
Если равенство (2.4.1) возможно и при ненулевом значении хотя бы одного числа  , то векторы
, то векторы  называются линейно зависимыми.
называются линейно зависимыми.
Пример №22
Рассмотрим евклидово пространство  и векторы
и векторы 
называемые координатными векторами. Покажем, что в пространстве  векторы
векторы линейно независимы.
линейно независимы.
Решение:
Пусть  произвольные числа. Составим линейную комбинацию векторов
произвольные числа. Составим линейную комбинацию векторов  :
:

Подставив координаты векторов  , получим:
, получим:
В результате получили вектор , который будет нулевым если
, который будет нулевым если  . Следовательно, линейная комбинация
. Следовательно, линейная комбинация  , может равняться нулю если
, может равняться нулю если  . А это и есть условие линейной независимости векторов
. А это и есть условие линейной независимости векторов  .
.
Вектор  называется линейной комбинацией векторов
называется линейной комбинацией векторов  из
из  , если существуют числа
, если существуют числа , такие, что выполняется равенство:
, такие, что выполняется равенство:  .
.
Относительно линейной зависимости векторов справедливы следующие утверждения:
- Если совокупность векторов
 из
из  содержит нулевой вектор, то она линейно зависима.
содержит нулевой вектор, то она линейно зависима. - Если в системе векторов
 имеется подсистема линейно зависимых векторов, то и вся совокупность векторов
имеется подсистема линейно зависимых векторов, то и вся совокупность векторов  линейно зависима.
линейно зависима. - Система векторов
 из
из  линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных.
линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных. - Любые
 векторов
векторов  из
из  , каждый из которых является линейной комбинацией m векторов
, каждый из которых является линейной комбинацией m векторов  линейно зависимы. .
линейно зависимы. .
Пример №23
Выясним линейную зависимость векторов  и
и  . Решение. Составим линейную комбинацию этих векторов
. Решение. Составим линейную комбинацию этих векторов
Полученный вектор является нулевым, если координаты равны нулю:
Полученная система имеет только одно решение  . Следовательно, векторное равенство
. Следовательно, векторное равенство  выполняется при нулевых значениях коэффициентов
выполняется при нулевых значениях коэффициентов  . Это значит, что векторы
. Это значит, что векторы  линейно независимы.
линейно независимы.
Заметим, что два геометрических вектора линейно зависимы тогда и только тогда, когда они коллинеарны (их направления параллельны). Три геометрических вектора линейно зависимы тогда и только тогда, когда они компланарны (их направления параллельны некоторой плоскости).
Элементы векторной алгебры
Некоторые физические величины (например, температура, масса, объем, работа, потенциал) могут быть охарактеризованы одним числом, которое выражает отношение этой величины к соответствующей единице измерения; такие величины называются скалярными. Ещё примеры скалярных величин: длина, площадь, время, угол, плотность, сопротивление.
Другие величины (например, сила, скорость, ускорение, напряжённость электрического или магнитного поля) характеризуются числом и направлением. Эти величины называются векторными.
Необходимо подчеркнуть, что вектор не является числом. Если мы рассматриваем вектор, лежащий в плоскости, то для его описания необходимо знать два фактора – модуль и его направление (например, угол, образуемый им с одним из осей координат). Если рассматривается вектор в трехмерном пространстве, то для описания вектора требуется три фактора: один – величину для его модуля и два для указания его положения в системе координат.
Скаляры и векторы
Величина, полностью характеризуемая своим числовым значением в выбранной системе единиц, называется скалярной или скаляром. Таковы, например, масса тела, объем его, температура среды и т. п. Скаляр определяется числом положительным или отрицательным или равным нулю.
Величина, кроме числового значения характеризуемая еще направлением, называется векторной или вектором. К числу их относятся сила, перемещение, скорость и т.п. Вектор определяется числом и направлением.
Векторы обычно обозначают буквами жирного шрифта, например а. Геометрически вектор изображается направленным отрезком пространства (рис. 168); при этом используется обозначение а =  , где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
, где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
Под модулем (длиной) вектора а

понимается числовое значение его, без учета направления. (Естественно,  обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
Два вектора  считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
В частности, для свободных векторов можно обеспечить общую начальную точку их. В дальнейшем мы будем излагать теорию свободных векторов в трехмерном пространстве.
Сумма векторов
Определение: Суммой нескольких векторов, например а, b, с, d (рис. 169), называется вектор

по величине и направлению равный замыкающей ОМ пространственной ломаной линии, построенной на данных векторах.
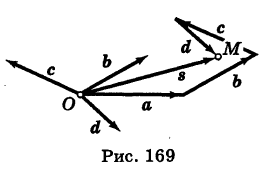
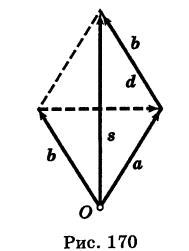
Для случая двух векторов а и b (рис. 170) их суммой s является диагональ параллелограмма, построенного на этих векторах, исходящая из общей точки приложения их (правило параллелограмма).
Так как в треугольнике длина одной стороны не превышает суммы длин двух других сторон, то из рис. 170 имеем

т. е. модуль суммы двух векторов не превышает суммы модулей этих векторов.
Для случая трех векторов а, b, с (рис. 171) их суммой s является диагональ  параллелепипеда, построенного на этих векторах (правило параллелепипеда).
параллелепипеда, построенного на этих векторах (правило параллелепипеда).
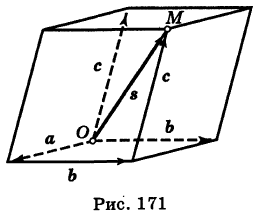
Легко проверить, что для векторного сложения справедливы следующие свойства:
1)переместительное свойство
а + b = b + а,
т. е. векторная сумма не зависит от порядка слагаемых;
2)сочетательное свойство

т.е. сумма трех (и большего числа) векторов не зависит от порядка расстановки скобок.
Для каждого вектора  (рис. 172) существует противоположный вектор
(рис. 172) существует противоположный вектор  , имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем
, имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем

где 0 — нуль-вектор.

Легко проверить, что а + 0 = а.
Разность векторов
Под разностью векторов  (рис. 173) понимается вектор
(рис. 173) понимается вектор

такой, что

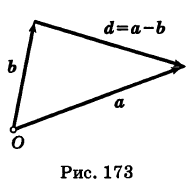
Отметим, что в параллелограмме, построенном на данных векторах (см. рис. 170), их разностью является соответственно направленная вторая диагональ.
Легко проверить, что справедливо следующее правило вычитания:

Умножение вектора на скаляр
Определение: Произведением вектора а на скаляр k (рис. 174) называется вектор
имеющий длину b = а, направление которого: 1) совпадает
а, направление которого: 1) совпадает
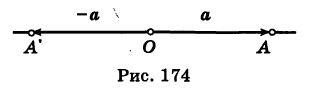
с направлением вектора а, если k > 0; 2) противоположно ему, если k < 0; 3) произвольно, если k = 0.
Нетрудно убедиться, что эта векторная операция обладает следующими свойствами:
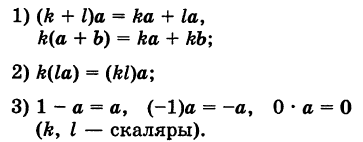
Пример:

Если ненулевой вектор а разделить на его длину a = |a| (т.е. умножить на скаляр 1 /а), то мы получим единичный вектор е, так называемый  , того же направления: е = а/а. Отсюда имеем стандартную формулу вектора
, того же направления: е = а/а. Отсюда имеем стандартную формулу вектора

Формула (1) формально справедлива также и для нулевого вектора а = 0, где а = 0 и е — произвольный орт.
Коллинеарные векторы
Определение: Два вектора  (рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
(рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
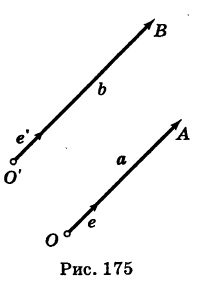
Так как направление нулевого вектора произвольно, то можно считать, что нулевой вектор коллинеарен любому вектору.
Теорема: Два ненулевых вектора  коллинеарны тогда и только тогда, когда они пропорциональны, т.е.
коллинеарны тогда и только тогда, когда они пропорциональны, т.е.

(k — скаляр).
Доказательство: 1) Пусть векторы 
 коллинеарны и е, е’ — их орты. Имеем
коллинеарны и е, е’ — их орты. Имеем

Очевидно,

где знак плюс соответствует векторам одинакового направления, а знак минус— векторам противоположного направления.
Из формул (2) и (3) получаем

Отсюда вытекает формула (1), где 
2) Если выполнено равенство (1), то коллинеарность векторов непосредственно следует из смысла умножения векторов на скаляр.
Компланарные векторы
Определение: Три вектора a, b и с называются компланарны ми, если они параллельны некоторой плоскости в широком смысле (т. е. или параллельны плоскости, или лежат в ней).
Можно сказать также, что векторы а, b и с компланарны тогда и только тогда, когда после приведения их к общему началу они лежат в одной плоскости.
По смыслу определения тройка векторов, среди которых имеется хотя бы один нулевой, компланарна.
Теорема: Три ненулевых вектора а, b и с компланарны тогда и только тогда, когда один из них является линейной комбинацией других, т.е., например,

(k, I — скаляры).
Доказательство: 1) Пусть векторы а, b и с компланарны, расположены в плоскости Р (рис. 176) и имеют общую точку приложения О.
Предположим сначала, что эти векторы не все попарно коллинеарны, например векторы а и b неколлинеарны. Тогда, производя разложение вектора с в сумму векторов са и сь, коллинеарных соответственно векторам а и b, в силу будем иметь

где k и I — соответствующие скаляры.
Если векторы а, b, с попарно коллинеарны, то можно написать

таким образом, снова выполнено условие (1).
2) Обратно, если для векторов  (рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
(рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
Пример:
Векторы а, а + b, а – b компланарны, так как
Проекция вектора на ось
Осью называется направленная прямая. Направление прямой обычно обозначается стрелкой. Заданное направление оси будем считать положительным, противоположное — отрицательным.
Определение: Проекцией точки А на ось  (рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
(рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
Здесь под перпендикуляром АА’ понимается прямая, пересекающая ось и составляющая с ней прямой угол. Таким образом, проекция А есть пересечение плоскости, проходящей через точку А и перпендикулярной оси с этой осью.
Определение: Под ком-по не н той (составляющей) вектора  относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
Определение: Под проекцией вектора а на ось понимается скаляр  , равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
, равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
Напомним, что все геометрические объекты мы здесь рассматриваем в трехмерном пространстве.
Если направление компоненты совпадает с направлением оси , и со знаком минус, если направление компоненты противоположно направлению оси
Если а = О, то полагают = О.
= О.
Заметим, что если е — единичный вектор оси , то для компоненты а’ справедливо равенство

Теорема: Проекция вектора а на ось равна произведению длины а вектора на косинус угла между направлением вектора и направлением оси, т.е.

Доказательство: Так как вектор  свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
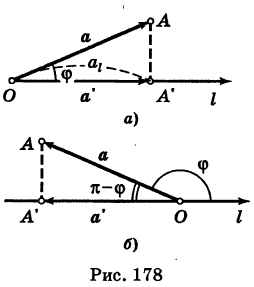
1) Если угол ф между вектором a и осью острый  , то направление компоненты
, то направление компоненты  вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем
вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем

2) Если угол ф между вектором а и осью тупой  (рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем
(рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем

3) Если же ф =  , то формула (2), очевидно, выполняется, так как при этом
, то формула (2), очевидно, выполняется, так как при этом  .
.
Таким образом, формула (2) доказана.
Следствие 1. Проекция вектора на ось: 1) положительна, если вектор образует с осью острый угол; 2) отрицательна, если этот угол — тупой, и 3) равна нулю, если этот угол — прямой.
Следствие 2. Проекции равных векторов на одну и ту же ось равны между собой.
Теорема: Проекция суммы нескольких векторов на данную ось равна сумме их проекций на эту ось.
Доказательство: Пусть, например, s = a + b + с,
где (рис. 179) 

 и, следовательно,
и, следовательно,  .
.
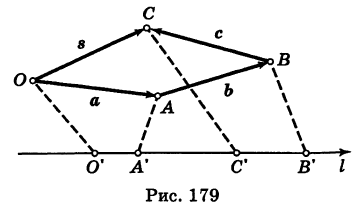
Обозначая проекции точек 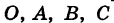 на ось
на ось  через
через  и учитывая направления компонент (рис. 179), имеем
и учитывая направления компонент (рис. 179), имеем

что и требовалось доказать.
Следствие. Проекция замкнутой векторной линии на любую ось равна нулю.
Теорема: При умножении вектора на скаляр его проекция на данную ось умножается на этот скаляр, т.е.

Формула (4) следует из теоремы 1 и смысла умножения вектора на скаляр.
Следствие. Проекция линейной комбинации векторов равна такой же линейной комбинации проекций этих векторов, т.е.

Прямоугольные декартовы координаты в пространстве
Пусть (рис. 180) Ox, Оу, Oz — три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начало координат) и образующие правую тройку (правая система координат), т. е. ориентированные по правилу правого буравчика. Иными словами, для наблюдателя, направленного по оси Oz, кратчайший поворот оси Ох к оси Оу происходит против хода часовой стрелки.
Три взаимно перпендикулярные плоскости Oyz, Ozx и Оху, проходящие через соответствующие оси, называются координатными плоскостями; они делят все пространство на восемь октантов.
Для каждой точки М пространства (рис. 180) существует ее радиус-вектор г = ОМ, начало которого есть начало координат О и конец которого есть данная точка М.
Определение: Под декартовыми прямоугольными координатами х, у, z точки М понимаются проекции ее радиуса вектора г на соответствующие оси координат, т. е.

В дальнейшем для краткости декартовы прямоугольные координаты мы будем называть просто прямоугольными координатами.
Точка М с координатами х, у, z обозначается через М (х, у, z), причем первая координата называется абсциссой, вторая — ординатой, а третья — аппликатой точки М.
Для нахождения этих координат через точку М проведем три плоскости МА, MB, МС, перпендикулярные соответственно осям Ox, Оу, Oz (рис. 180). Тогда на этих осях получатся направленные отрезки

численно равные координатам точки М.
Радиус-вектор г является диагональю параллелепипеда П с измерениями  , образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому
, образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому

Если обозначить через  углы, образованные радиусом-вектором г с координатными осями, то будем иметь
углы, образованные радиусом-вектором г с координатными осями, то будем иметь

Косинусы cos а, cos р, cos у называются направляющими косинусами радиуса-вектора г. Из (4), учитывая (3), получаем

т. е. сумма квадратов направляющих косинусов радиуса-век-тора точки пространства равна 1.
Из формулы (4) следует, что координата точки М положительна, если радиус-вектор этой точки образует острый угол с соответствующей координатной осью, и отрицательна, если этот угол тупой. В частности, в I октанте пространства, ребра которого составляют положительные полуоси координат, все координаты точек положительны- В остальных октантах пространства отрицательными координатами точек будут те, которые соответствуют отрицательно направленным ребрам октанта.
Измерения  параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
В частности, если точка  лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
Длина и направление вектора
Пусть в пространстве Oxyz задан вектор а. Проекции этого вектора на оси координат

называются координатами вектора а; при этом вектор мы будем записывать так: 
Так как вектор а свободный, то его можно рассматривать как радиус-вектор точки  . Отсюда получаем длину вектора
. Отсюда получаем длину вектора

т.е. модуль вектора равен корню квадратному из суммы квадратов его координат.
Направляющие косинусы вектора а определяются из уравнений

причем

т.е. сумма квадратов направляющих косинусов вектора равна единице. Направляющие косинусы ненулевого вектора однозначно определяют его направление. Следовательно, вектор полностью характеризуется своими координатами.
Пример №24
Найти длину и направление вектора а = {1, 2, -2}.
Решение:
Имеем

Отсюда
Таким образом, вектор а образует острые углы с координатными осями Ох и Оу и тупой угол с координатной осью Ог.
Расстояние между двумя точками пространства
Пусть  — начальная точка отрезка
— начальная точка отрезка  и
и  — конечная точка его. Точки
— конечная точка его. Точки  можно задать их радиусами-векторами
можно задать их радиусами-векторами  и
и  (рис. 181).
(рис. 181).
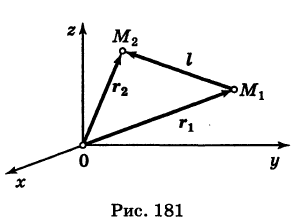
Рассматривая вектор  , из
, из  будем иметь
будем иметь

Проецируя это векторное равенство на оси координат и учитывая свойства проекций, получаем

Таким образом, проекции направленного отрезка на оси координат равны разностям соответствующих координат конца и начала отрезка.
Из формул (2) получаем длину отрезка (или, иначе, расстояние между двумя точками  )
)

Итак, расстояние между двумя точками пространства равно корню квадратному из квадратов разностей одноименных координат этих точек.
Пример №25
Ракета из пункта М1 (10, -20, 0) прямолинейно переместилась в пункт М2 (-30, -50, 40) (расстояния даны в километрах). Найти путь пройденный ракетой.
Решение:
На основании формулы (3) имеем

Заметим, что, найдя направляющие косинусы вектора перемещения  , нетрудно определить направление движения ракеты.
, нетрудно определить направление движения ракеты.
Действие над векторами, заданными в координатной форме
Пусть вектор  задан своими проекциями на оси координат Ox, Оу, Oz.
задан своими проекциями на оси координат Ox, Оу, Oz.
Построим параллелепипед (рис. 182), диагональю которого является вектор а, а ребрами служат компоненты его  относительно соответствующих координатных осей. Имеем разложение
относительно соответствующих координатных осей. Имеем разложение

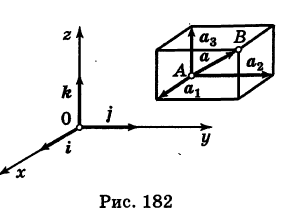
Если ввести единичные векторы (орты) i, j, k, направленные по осям координат, то на основании связи между компонентами вектора и его проекциями будем иметь

Подставляя эти выражения в равенство (1), получаем координатную форму вектора

Заметим, что разложение (3) для вектора а единственно. Действительно, пусть

Отсюда, вычитая из равенства (3) равенство (3′) и пользуясь перемести -тельным и сочетательным свойствами суммы векторов, а также свойствами разности векторов, будем иметь

Если хотя бы один из коэффициентов при ортах i, j и k был отличен от нуля, то векторы i, j и k были бы компланарны, что неверно. Поэтому  и единственность разложения (3) доказана.
и единственность разложения (3) доказана.
Если  то, очевидно, также имеем
то, очевидно, также имеем

Рассмотренные выше линейные операции над векторами можно теперь записать в следующем виде:

или короче:  . Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;
. Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;

или кратко: 
Таким образом, при сложении (или вычитании) векторов их одноименные координаты складываются (или вычитаются):
Пример №26
Найти равнодействующую F двух сил

и ее направление.
Решение:
Имеем  . Отсюда
. Отсюда

где  — направляющие косинусы равнодействующей F.
— направляющие косинусы равнодействующей F.
Скалярное произведение векторов
Определение: Под скалярным произведением двух векторов а и b понимается число, равное произведению длин этих векторов на косинус угла между ними, т. е. в обычных обозначениях:

где 
Заметим, что в формуле (1) скалярное произведение можно еще записывать как ab, опуская точку. Так как (рис. 183)

то можно записать

т.е. скалярное произведение двух векторов равно длине одного из них, умноженной на проекцию другого на ось с направлением первого.
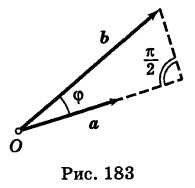
Физический смысл скалярного произведения
Пусть постоянная сила F обеспечивает прямолинейное перемещение  материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
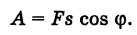
На основании формулы (1) имеем

Таким образом, работа постоянной силы при прямолинейном перемещении ее м точки приложения равна скалярному произведению вектора силы на вектор перемещения.
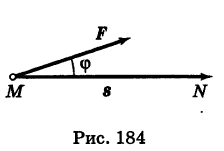
Скалярное произведение векторов обладает следующими основными свойствами.
1)Скалярное произведение двух векторов не зависит от порядка этих сомножителей (переместительное свойство):

Эта формула непосредственно следует из формулы (1).
2)Для трех векторов а, b и с справедливо распределительное свойство

т. е. при скалярном умножении суммы векторов на вектор можно «раскрыть скобки».
Действительно, на основании формул (2), учитывая свойства проекций векторов, имеем

3)Скалярный квадрат вектора равен квадрату модуля этого вектора, т.е.

Действительно,

Отсюда для модуля вектора получаем формулу

4)Скалярный множитель можно выносить за знак скалярного произведения, т.е.

Это свойство также легко получается из (1).
5)Скалярное произведение линейной комбинации векторов на произвольный вектор равно такой же линейной комбинации данных векторов на этот вектор, т.е.

( — скаляры).
— скаляры).
Это — очевидное следствие 2) и 4).
Из определения (1) вытекает, что косинус угла  между двумя ненулевыми векторами а и b равен
между двумя ненулевыми векторами а и b равен

Из формулы (8) получаем, что два вектора а и b перпендикулярны (ортогональны), т. е.  , тогда и только тогда, когда
, тогда и только тогда, когда

Это утверждение справедливо также и в том случае, когда хотя бы один из векторов а или b нулевой.
Пример №27
Найти проекцию вектора а на вектор b. Обозначая через  угол между этими векторами, имеем
угол между этими векторами, имеем

где е = — орт вектора b
— орт вектора b
Скалярное произведение векторов в координатной форме
Пусть

Перемножая эти векторы как многочлены и учитывая соотношения

будем иметь

Таким образом, скалярное произведение векторов равно сумме парных произведений их одноименных координат. Отсюда, обозначая через ф угол между векторами а и b, получаем

Пример:
Определить угол ф между векторами а = { 1,+2, 3} и b ={-3, 2,-1}. На основании формулы (4) имеем

Отсюда 
Пусть векторы а и b коллинеарны (параллельны). Согласно условию коллинеарности,

где k — скаляр, что эквивалентно  или
или

Таким образом, векторы коллинеарны тогда и только тогда, когда их одноименные координаты пропорциональны.
Для перпендикулярных (ортогональных) векторов а и b имеем  и, следовательно, cos ф = 0 или, согласно формуле (4),
и, следовательно, cos ф = 0 или, согласно формуле (4),

Таким образом, два вектора перпендикулярны тогда и только тогда, когда сумма парных произведений их одноименных координат равна нулю.
Векторное произведение векторов
Напомним, что тройка а, b и с некомпланарных векторов называется правой (рис. 185, а) или левой (рис. 185, б), если она ориентирована по правилу правого винта или соответственно по правилу левого винта.
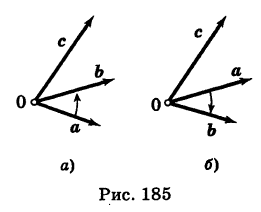
Заметим, что если в тройке некомпланарных векторов а, b, с переставить два вектора, то она изменит свою ориентацию, т. е. из правой сделается левой или наоборот.
В дальнейшем правую тройку мы будем считать стандартной.
Определение: Под векторным произведением двух векторов а и b понимается вектор

для которого:
1)модуль равен площади параллелограмма, построенного на данных векторах, т. е.

где  (рис. 186);
(рис. 186);
2)этот вектор перпендикулярен перемножаемым векторам (иначе говоря, перпендикулярен плоскости построенного на них параллелограмма), т. е.  ;
;
3)если векторы неколлинеарны, то векторы а, b, с образуют правую тройку векторов.
Укажем основные свойства векторного произведения.
1)При изменении порядка сомножителей векторное произведение меняет свой знак на обратный, сохраняя модуль, т. е.

Действительно, при перестановке векторов а и b площадь построенного на них параллелограмма остается неизменной, т. е.  . Однако тройка векторов
. Однако тройка векторов  является левой. Поэтому направление вектора
является левой. Поэтому направление вектора  противоположно направлению вектора
противоположно направлению вектора  (а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
(а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
Таким образом, векторное произведение двух векторов не обладает переместительным свойством.
2)Векторный квадрат равен нуль-вектору, т.е.

Это — очевидное следствие свойства 1).
3)Скалярный множитель можно выносить за знак векторного произведения, т.е. если  — скаляр, то
— скаляр, то

Это свойство непосредственно вытекает из смысла произведения вектора на скаляр и определения векторного произведения.
4)Для любых трех векторов а, b, с справедливо равенство

т.е. векторное произведение обладает распределительным свойством.
Пример:

Отсюда, в частности, имеем

т. е. площадь параллелограмма, построенного на диагоналях данного параллелограмма, равна удвоенной площади этого параллелограмма.
С помощью векторного произведения удобно формулировать легко проверяемый критерий коллинеарности двух векторов а и b:

Векторное произведение в координатной форме
Пусть

Перемножая векторно эти равенства и используя свойства векторного произведения, получим сумму девяти слагаемых:

Из определения векторного произведения следует, что для ортов  справедлива следующая «таблица умножения»:
справедлива следующая «таблица умножения»:

Поэтому из формулы (3) получаем
 (с сохранением порядка следования букв
(с сохранением порядка следования букв  ).
).
Для удобства запоминания формула (4) записывается в виде определителя третьего порядка (см. гл. XVII) 
Из формулы (4) вытекает, что

Геометрически формула (6) дает квадрат площади параллелограмма, построенного на векторах  .
.
Пример №28
Найти площадь треугольника с вершинами А (1, 1, 0), В (1,0, 1) и С (0, 1, 1).
Решение:
Площадь S треугольника ABC равна 1/2 площади параллелограмма, построенного на векторах  (рис. 187). Используя формулы для проекций направленных отрезков, имеем
(рис. 187). Используя формулы для проекций направленных отрезков, имеем 
 отсюда
отсюда 
Следовательно,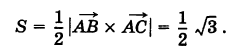
Смешанное произведение векторов
Определение: Под смешанным (или векторно-скалярным) произведением векторов  понимается число
понимается число

Построим параллелепипед П (рис. 188), ребрами которого, исходящими из общей вершины О, являются векторы .
Тогда  представляет собой площадь параллелограмма, построенного на векторах
представляет собой площадь параллелограмма, построенного на векторах  , т.е. площадь основания параллелепипеда.
, т.е. площадь основания параллелепипеда. 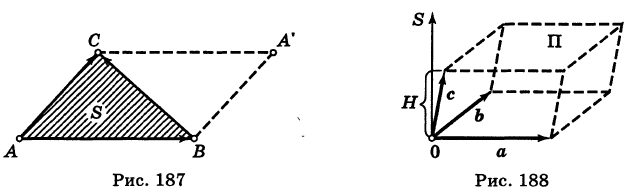
Высота этого параллелепипеда  , очевидно, равна
, очевидно, равна

где  и знак плюс соответствует острому углу
и знак плюс соответствует острому углу 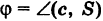 , а знак минус — тупому углу ф. В первом случае векторы
, а знак минус — тупому углу ф. В первом случае векторы  образуют правую тройку, а во втором — левую тройку.
образуют правую тройку, а во втором — левую тройку.
На основании определения скалярного произведения имеем

где V — объем параллелепипеда, построенного на векторах . Отсюда
т. е. смешанное произведение трех векторов равно объему V параллелепипед а у построенного на этих векторах, взятому со знаком плюсу если эти векторы образуют правую тройку, и со знаком минус, если они образуют левую тройку.
Справедливы следующие основные свойства смешанного произведения векторов.
1)Смешанное произведение не меняется при циклической перестановке его сомножителей, т.е.

Действительно, в этом случае не изменяется ни объем параллелепипеда П, ни ориентация его ребер.
2)При перестановке двух соседних множителей смешанное произведение меняет свой знак на обратный, т. е.

Это следует из того, что перестановка соседних множителей, сохраняя объем параллелепипеда, изменяет ориентацию тройки векторов, т.е. правая тройка переходит в левую, а левая — в правую.
С помощью смешанного произведения получаем необходимое и достаточное условие компланарности трех векторов :
abc = 0
(объем параллелепипеда равен нулю). Если
то, используя выражения в координатах для векторного и скалярного произведений векторов, получаем
 т. e.
т. e. 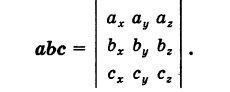
- Прямая – понятие, виды и её свойства
- Плоскость – определение, виды и правила
- Кривые второго порядка
- Евклидово пространство
- Логарифм – формулы, свойства и примеры
- Корень из числа – нахождение и вычисление
- Теория множеств – виды, операции и примеры
- Числовые множества
Леонидыч
29 января, 02:28
0
Это векторная физическая величина, являющаяся силовой характеристикой магнитного поля, численно равная отношению максимальной силы Fmax, действующей на проводник в магнитном поле, на произведение силы тока I в проводнике на его длину L.
B = Fmax / (I*L)
Направление вектора магн. индукции совпадает с:
1) направлением северного конца магнитной стрелки, помещенной в магнитное поле.
2) направлением нормали рамки с током, в соответствии с правилом буравчика.
- Комментировать
- Жалоба
- Ссылка
-
Определение вектора.
Начать изучение
-
Ещё одно определение вектора.
Начать изучение
-
Линейные операции.
Начать изучение
-
Линейная зависимость векторов.
Начать изучение
Определение вектора.
Понятие вектора известно из школьного курса, но лучше напомнить основные факты, с ним связанные. Пару точек мы называем упорядоченной, если про эти точки известно, какая из них первая, а какая — вторая.
Определение 1.
Отрезок, концы которого упорядочены, называется направленным отрезком или вектором. Первый из его концов называется началом, второй — концом вектора. К векторам относится и нулевой вектор, у которого начало и конец совпадают.
Направление вектора на рисунке принято обозначать стрелкой, над буквенным обозначением вектора тоже ставится стрелка, например (overrightarrow{AB}) (при этом буква, обозначающая начало, обязательно пишется первой). В книгах буквы, обозначающие векторы, набираются полужирным шрифтом, например (boldsymbol{a}). Нулевой вектор обозначается (boldsymbol{0}).
Расстояние между началом и концом вектора называется его длиной (а также модулем или абсолютной величиной). Длина вектора обозначается |(boldsymbol{a})| или |(overrightarrow{AB})|.
Векторы называются коллинеарными если существует такая прямая, которой они параллельны. Векторы компланарны, если существует плоскость, которой они параллельны. Нулевой вектор считается коллинеарным любому вектору, так как он не имеет определенного направления. Длина его, разумеется, равна нулю.
Определение 2.
Два вектора называются равными, если они коллинеарны, одинаково направлены и имеют равные длины.
Из этого определения следует, что, выбрав любую точку (A’), мы можем построить (и притом только один) вектор|(overrightarrow{A’B’})|, равный некоторому заданному вектору |(overrightarrow{AB})|, или, как говорят, перенести вектор |(overrightarrow{AB})| в точку А’.
Ещё одно определение вектора.
Понятие равенства векторов существенно отличается от понятия равенства, например, чисел. Каждое число равно только самому себе, иначе говоря, два равных числа при всех обстоятельствах могут рассматриваться как одно и то же число. С векторами дело обстоит по-другому: в силу определения существуют различные, но равные между собой векторы. Хотя в большинстве случаев у нас не будет необходимости различать их между собой, вполне может оказаться, что в какой-то момент нас будет интересовать именно вектор (overrightarrow{AB}), а не равный ему вектор (overrightarrow{A’B’}).
Для того чтобы упростить понятие равенства и снять некоторые связанные с ним трудности, иногда идут на усложнение определения вектора. Мы не будем пользоваться этим усложненным определением, но сформулируем его. Чтобы не путать, будем писать “Вектор” (с большой буквы) для обозначения определяемого ниже понятия.
Определение 3.
Пусть дан направленный отрезок. Множество всех направленных отрезков, равных данному в смысле определения 2, называется Вектором.
Таким образом, каждый направленный отрезок определяет Вектор. Легко видеть, что два направленных отрезка определяют один и тот же Вектор тогда и только тогда, когда они равны согласно определению 2. Для Векторов, как и для чисел, равенство означает совпадение.
Из начального курса физики хорошо известно, что сила может быть изображена направленным отрезком. Но она не может быть изображена Вектором, поскольку силы, изображаемые равными направленными отрезками, производят, вообще говоря, различные действия. (Если сила действует на упругое тело, то изображающий ее отрезок не может быть перенесен даже вдоль той прямой, на которой он лежит.)
Это только одна из причин, по которой наряду с Векторами приходится рассматривать и направленные отрезки. При этих обстоятельствах применение определения 3 осложняется большим числом оговорок. Мы будем придерживаться определения 1, причем по общему смыслу всегда будет ясно, идет речь об определенном векторе или на его место может быть подставлен любой, ему равный.
В связи со сказанным стоит разъяснить значение некоторых слов, встречающихся в литературе. Вместо определения 2 можно ввести для векторов другое определение равенства, согласно которому векторы равны, если они равны по длине, лежат на одной прямой и направлены в одну сторону. В этом случае вектор не может быть перенесен в любую точку пространства, а переносится только вдоль прямой, на которой он лежит. При таком понимании равенства векторы называются скользящими векторами. В механике сила, действующая на абсолютно твердое тело, изображается скользящим вектором.
Можно для векторов не давать никакого особого определения равенства, то есть считать, что вектор характеризуется, помимо длины и направления в пространстве, еще и точкой приложения. В этом случае векторы называются приложенными. Как уже упоминалось, сила, действующая на упругое тело, изображается приложенным вектором.
Если нужно подчеркнуть, что равенство векторов понимается в смысле определения 2, то векторы называются свободными.
Линейные операции.
Линейными операциями называются сложение векторов и умножение вектора на число. Напомним их определения.
Определение.
Пусть даны два вектора (boldsymbol{a}) и (boldsymbol{b}). Построим равные им векторы (overrightarrow{AB}) и (overrightarrow{BC}). Тогда вектор (overrightarrow{AC}) называется суммой векторов (boldsymbol{a}) и (boldsymbol{b}) и обозначается (boldsymbol{a} + boldsymbol{b}).
Заметим, что, выбрав вместо (B) другую точку, мы получили бы другой вектор, равный вектору (overrightarrow{AC}).
Определение.
Произведением вектора (boldsymbol{a}) на вещественное число (alpha) называется вектор (boldsymbol{b}), удовлетворяющий следующим условиям:
- |(boldsymbol{b})| = |(alpha)||(boldsymbol{a})|;
- (boldsymbol{b}) коллинеарен (boldsymbol{a});
- (boldsymbol{b}) и (boldsymbol{a}) направлены одинаково, если (alpha > 0), и противоположно, если (alpha < 0). (Если же (alpha = 0), то из первого условия следует (boldsymbol{b} = 0).)
Произведение вектора (boldsymbol{a}) на число (alpha) обозначается (alphaboldsymbol{a}).
Приведенное определение определяет вектор (alphaboldsymbol{a}) не единственным образом, но все удовлетворяющие ему векторы равны между собой. В курсе средней школы были выведены основные свойства линейных операций. Перечислим их без доказательства.
Утверждение 1.
Для любых векторов (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) и любых чисел (alpha) и (beta) выполнено:
- (boldsymbol{a} + boldsymbol{b} = boldsymbol{b} + boldsymbol{a}) (сложение коммутативно);
- ((boldsymbol{a} + boldsymbol{b}) + boldsymbol{c} = boldsymbol{a} + (boldsymbol{b} + boldsymbol{c})) (сложение ассоциативно);
- (boldsymbol{a} + 0 = boldsymbol{a});
- вектор ((-1)boldsymbol{a}) противоположный для (boldsymbol{a}): (boldsymbol{a} + (-1)boldsymbol{a} = 0);
- ((alphabeta)boldsymbol{a} = alpha(betaboldsymbol{a}));
- ((alpha + beta)boldsymbol{a} = alphaboldsymbol{a} + betaboldsymbol{a});
- (alpha(boldsymbol{a} + boldsymbol{b}) = alphaboldsymbol{a} + alphaboldsymbol{b});
- (1boldsymbol{a} = boldsymbol{a}).
Вектор ((-1)boldsymbol{a}) обозначается (boldsymbol{-a}). Разностью векторов (boldsymbol{a}) и (boldsymbol{b}) называется сумма векторов (boldsymbol{a}) и (boldsymbol{-b}). Она обозначается (boldsymbol{a-b}). Если (boldsymbol{b + x = a}), то (boldsymbol{x = a-b}) (рис. 1).

В этом смысле вычитание — операция, сопоставляющая паре векторов разность первого и второго, — есть операция, обратная сложению, и мы не считаем его отдельной операцией. Точно так же мы не выделяем деление вектора на число (alpha), так как его можно определить как умножение на (alpha^{-1}). Из определения произведения вектора на число прямо следует ещё одно утверждение.
Утверждение 2.
Если (boldsymbol{a} neq 0) , то любой вектор (boldsymbol{b}), коллинеарный (boldsymbol{a}), представим в виде (boldsymbol{b} = pm (|boldsymbol{b}|/|boldsymbol{a}|)boldsymbol{a}). Знак + или — берут, смотря по тому, направлены (boldsymbol{a}) и (boldsymbol{b}) одинаково или нет.
Применяя линейные операции, можно составлять суммы векторов, умноженных на числа:
$$
alpha_{1}boldsymbol{a_{1}} + alpha_{2}boldsymbol{a_{2}} + ldots + alpha_{k}boldsymbol{a_{k}}.nonumber
$$
Выражения такого вида называются линейными комбинациями. Числа, входящие в линейную комбинацию, называются ее коэффициентами. Свойства, перечисленные в первом утверждении, позволяют преобразовывать линейные комбинации по обычным правилам алгебры: раскрывать скобки, приводить подобные члены, переносить некоторые члены в другую часть равенства с противоположным знаком и так далее. Утверждение 1 дает в некотором смысле полный набор свойств: любые вычисления, использующие линейные операции, можно производить, основываясь на них и не обращаясь к определениям.
Линейные комбинации обладают следующим очевидным свойством: если векторы (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}) коллинеарны, то любая их линейная комбинация им коллинеарна. Если же они компланарны, то любая их линейная комбинация им компланарна. Это сразу следует из того, что вектор (alphaboldsymbol{a}) коллинеарен (boldsymbol{a}), а сумма векторов компланарна слагаемым и коллинеарна им, если они коллинеарны.
Множество называется замкнутым относительно некоторой операции, если для любых элементов множества результат применения этой операции принадлежит данному множеству.
Определение.
Множество векторов, замкнутое относительно линейных операций, называется векторным пространством. Если одно векторное пространство является подмножеством другого, то оно называется его подпространством.
Таким образом, можно сказать, что множество всех векторов, параллельных данной прямой, и множество всех векторов, параллельных данной плоскости, являются векторными пространствами. Чтобы различать эти два типа векторных пространств, их называют соответственно одномерными и двумерными пространствами.
Помимо упомянутых, существуют еще два векторных пространства: нулевое или нульмерное, состоящее только из нулевого вектора, и трехмерное — множество всех векторов пространства.
Нулевое пространство является подпространством для каждого другого, и каждое векторное пространство является подпространством для трехмерного.
Линейная зависимость векторов.
Говорят, что вектор (boldsymbol{b}) раскладывается по векторам (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}), если он представим как их линейная комбинация, то есть найдутся такие коэффициенты, что
$$
boldsymbol{b} = beta_{1}boldsymbol{a_{1}} + ldots + beta_{k}boldsymbol{a_{k}}.nonumber
$$
Вполне может случиться, что какой-то вектор раскладывается по данной системе векторов, и при этом коэффициенты разложения определены неоднозначно.
Например,
если (boldsymbol{a_{3}} = boldsymbol{a_{1}} + boldsymbol{a_{2}}), то вектор (boldsymbol{b} = boldsymbol{-a_{3}}) раскладывается так же, как (boldsymbol{b} = boldsymbol{-a_{1}}-boldsymbol{a_{2}}) или (boldsymbol{b} = boldsymbol{a_{3}}-2boldsymbol{a_{1}}-2boldsymbol{a_{2}}) и так далее.
Посмотрим, с чем это связано. Нулевой вектор раскладывается по любой системе векторов, так как мы получим нулевой вектор, если возьмем линейную комбинацию этих векторов с нулевыми коэффициентами. Такая линейная комбинация называется тривиальной.
Определение.
Система векторов (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}) называется линейно независимой, если нулевой вектор раскладывается по ней единственным образом.
Иначе говоря, система векторов линейно независима, если только тривиальная линейная комбинация этих векторов равна нулевому вектору, или, подробнее, если из равенства
$$
alpha_{1}boldsymbol{a_{1}} + ldots + alpha_{k}boldsymbol{a_{k}} = 0nonumber
$$
следует, что
$$
alpha_{1} = ldots = alpha_{k} = 0.nonumber
$$
Система векторов (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}) линейно зависима, если нулевой вектор раскладывается по ней не единственным образом, то есть если найдутся такие коэффициенты (alpha_{1},ldots,alpha_{k}) что
$$
alpha_{1}boldsymbol{a_{1}} + ldots + alpha_{k}boldsymbol{a_{k}} = 0,nonumber
$$
но не все они равны нулю, то есть:
$$
alpha_{1}^{2} + ldots + alpha_{k}^{2} neq 0.nonumber
$$
Рассмотрим свойства линейно-зависимых и линейно-независимых систем векторов.
Свойство 1.
Если среди векторов (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}), есть нулевой, то такая система линейно зависима.
Доказательство.
(circ) Действительно, рассмотрим линейную комбинацию, в которую (boldsymbol{0}) входит с коэффициентом 1, а остальные векторы с нулевыми коэффициентами. Эта линейная комбинация нетривиальна и равна нулевому вектору.(bullet)
Следствие.
Система, содержащая один вектор, линейно зависима, если он нулевой.
Свойство 2.
Если к линейно зависимой системе (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}) добавить какие-то векторы (boldsymbol{b_{1}},ldots,boldsymbol{b_{k}}), то полученная система векторов будет линейно зависимой.
Доказательство.
В самом деле, к имеющейся равной 0 нетривиальной линейной комбинации векторов (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}) можно добавить векторы (boldsymbol{b_{1}},ldots,boldsymbol{b_{k}}) с нулевыми коэффициентами.
Следствие.
Если в системе векторов какая-то часть линейно зависима, то вся система обязательно линейно зависима.
Следствие.
Любая часть линейно независимой системы линейно независима.
Утверждение 3.
Если вектор (boldsymbol{x}) раскладывается по системе векторов (boldsymbol{a_{1}},ldots,boldsymbol{a_{k}}), то это разложение единственно тогда и только тогда, когда система векторов линейно независима.
Доказательство.
(circ) Действительно, пусть существуют два разложения (boldsymbol{x} = alpha_{1}boldsymbol{a_{1}} + ldots + alpha_{k}boldsymbol{a_{k}}) и (boldsymbol{x} = beta_{1}boldsymbol{a_{1}} + ldots + beta_{k}boldsymbol{a_{k}}). Вычитая их почленно одно из другого, мы получим ((alpha_{1}-beta_{1})boldsymbol{a_{1}} + ldots + (alpha_{k}-beta_{k})boldsymbol{a_{k}} = 0). Если векторы линейно независимы, отсюда следует, что (alpha_{1}-beta_{1} = 0, ldots, alpha_{k}-beta_{k} = 0), то есть оба разложения совпадают.
Обратно, если векторы линейно зависимы, существует их нетривиальная линейная комбинация, равная нулевому вектору: (alpha_{1}boldsymbol{a_{1}} + ldots + alpha_{k}boldsymbol{a_{k}} = 0). Мы можем прибавить ее к имеющемуся разложению (boldsymbol{x} = beta_{1}boldsymbol{a_{1}} + ldots + beta_{k}boldsymbol{a_{k}}), и получить новое разложение (boldsymbol{x}) по тем же векторам: (boldsymbol{x} = (alpha_{1} + beta_{1})boldsymbol{a_{1}} + ldots + (alpha_{k} + beta_{k})boldsymbol{a_{k}} = 0). Утверждение доказано. (bullet)
Утверждение 4.
Система из (k > 1) векторов линейно зависима тогда и только тогда, когда один из векторов раскладывается по остальным.
Доказательство.
(circ) Пусть система векторов (boldsymbol{a_{1}}ldotsboldsymbol{a_{k}}) линейно зависима, то есть существуют такие коэффициенты (alpha_{1}, ldots, alpha_{k}), что (alpha_{1}boldsymbol{a_{1}} + ldots + alpha_{k}boldsymbol{a_{k}} = 0), и, например, (alpha_{1}) отличен от нуля. В этом случае мы можем разложить (boldsymbol{a_{1}}) по остальным векторам:
$$
boldsymbol{a_{1}} = -frac{alpha_{2}}{alpha_{1}}boldsymbol{a_{2}}-ldots-frac{alpha_{k}}{alpha_{1}}boldsymbol{a_{1}}.nonumber
$$
Обратно, пусть один из векторов, например, (boldsymbol{a_{1}}) разложен по остальным векторам: (boldsymbol{a_{1}} = beta_{2}boldsymbol{a_{2}} + ldots + beta_{k}boldsymbol{a_{k}}). Это означает, что линейная комбинация векторов (boldsymbol{a_{1}}, ldots, boldsymbol{a_{k}}) с коэффициентами (-1, beta_{1}, ldots, beta_{k}) равна нулевому вектору. Предложение доказано.
Понятие линейной зависимости будет играть большую роль в дальнейшем изложении, но сейчас мы могли бы обойтись без него ввиду простого геометрического смысла, который имеет это понятие.
Теорема 1.
Система из одного вектора линейно зависима тогда и только тогда, когда это — нулевой вектор.
Система из двух векторов линейно зависима тогда и только тогда, когда векторы коллинеарны.
Система из трех векторов линейно зависима тогда и только тогда, когда векторы компланарны.
Любые четыре вектора линейно зависимы.
Доказательство.
- (circ) Мы уже отмечали, что нулевой вектор составляет линейно зависимую систему. Система, содержащая только ненулевой вектор линейно независима, так как при его умножении на число, отличное от нуля, получится ненулевой вектор.
- Пусть векторы (boldsymbol{a}) и (boldsymbol{b}) коллинеарны. Если (boldsymbol{a} = 0), то (boldsymbol{a}) и (boldsymbol{b}) линейно зависимы. Пусть (boldsymbol{a} neq 0). Тогда по предложению (2 boldsymbol{b}) раскладывается по (boldsymbol{a}). Таким образом, в любом случае коллинеарные векторы линейно зависимы.Обратно, из двух линейно зависимых векторов один обязательно раскладывается по другому и, следовательно, ему коллинеарен.
- Пусть векторы (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) компланарны. Если (boldsymbol{a}) и (boldsymbol{b}) коллинеарны, то они линейно зависимы, и тогда линейно зависимы все три вектора. Пусть (boldsymbol{a}) и (boldsymbol{b}) не коллинеарны. Разложим (boldsymbol{c}) по ним.Для этого поместим начала всех векторов в одну точку (O) (рис. 1.2) и проведем через конец (C) вектора (boldsymbol{c}) прямую, параллельную (boldsymbol{b}), до пересечения в точке (P) с прямой, на которой лежит (boldsymbol{a}). (Это построение возможно, так как векторы (boldsymbol{a}) и (boldsymbol{b}) не коллинеарны и, в частности, оба ненулевые.) Теперь (overrightarrow{OC} = overrightarrow{OP} + overrightarrow{PC}), причем (overrightarrow{OP}) и (overrightarrow{PC}) коллинеарны соответственно (boldsymbol{a}) и (boldsymbol{b}). По доказанному выше найдутся числа (alpha) и (beta) такие, что (overrightarrow{OP} = alphaboldsymbol{a}) и (overrightarrow{PC} = betaboldsymbol{b}). Таким образом, (boldsymbol{c} = alphaboldsymbol{a} + betaboldsymbol{b}). Это означает, что (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) линейно зависимы.

Рис. 1.2 Обратно, если (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) линейно зависимы, то один из них раскладывается по двум другим и, следовательно, им компланарен.
- Рассмотрим четыре вектора (boldsymbol{a}), (boldsymbol{b}), (boldsymbol{c}) и (boldsymbol{d}). Если (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) компланарны, то они линейно зависимы сами по себе и вместе с вектором (boldsymbol{d}). Пусть (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) не компланарны. Аналогично предыдущему докажем, что (boldsymbol{d}) раскладывается по ним. Поместим начала всех векторов в одну точку (O) (рис. 1.3) и проведем через конец (D) вектора (boldsymbol{d}) прямую, параллельную (boldsymbol{c}), до пересечения в точке (P) с плоскостью, на которой лежат (boldsymbol{a}) и (boldsymbol{b}).

Рис. 1.3 Теперь (overrightarrow{OD} = overrightarrow{OP} + overrightarrow{PD}), причем (overrightarrow{OP}) компланарен (boldsymbol{a}) и (boldsymbol{b}), a (overrightarrow{PD}) коллинеарен (boldsymbol{c}). По доказанному выше (overrightarrow{OP}) раскладывается по (boldsymbol{a}) и (boldsymbol{b}), a (overrightarrow{PD}) — по (boldsymbol{c}). Значит, (boldsymbol{d}) разложен по (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{c}) и составляет с ними линейно зависимую систему. Теорема доказана. (bullet)
Базис.
Ранее было дано определение векторного пространства. Введем теперь определение базиса.
Определение.
Базисом в векторном пространстве называется упорядоченная линейно независимая система векторов такая, что любой вектор этого пространства по ней раскладывается.
Из доказанной выше теоремы сразу вытекает, что
- В нулевом пространстве базиса не существует.
- В одномерном пространстве (на прямой линии) базис состоит из одного ненулевого вектора.
- В двумерном пространстве (на плоскости) базис — упорядоченная пара неколлинеарных векторов.
- В трехмерном пространстве базис — упорядоченная тройка некомпланарных векторов.
Требование упорядоченности означает, что, например, в случае плоскости (boldsymbol{a}), (boldsymbol{b}) и (boldsymbol{b}), (boldsymbol{a}) — два разных базиса.
Так как векторы базиса линейно независимы, коэффициенты разложения по базису для каждого вектора пространства определены однозначно. Они называются компонентами или координатами вектора в этом базисе.
Таким образом, если (boldsymbol{e_{1}}), (boldsymbol{e_{2}}), (boldsymbol{e_{3}}) — базис трехмерного пространства, то по формуле (boldsymbol{a} = alpha_{1}boldsymbol{e_{1}} + alpha_{2}boldsymbol{e_{2}} + alpha_{3}boldsymbol{e_{3}}) каждому вектору сопоставлена единственная упорядоченная тройка чисел (alpha_{1}), (alpha_{2}), (alpha_{3}) и каждой тройке чисел — единственный вектор. Аналогично, вектор на плоскости имеет две компоненты, а на прямой — одну.
Компоненты пишутся в скобках после буквенного обозначения вектора, например (boldsymbol{a})(1,0,1).
В аналитической геометрии геометрические рассуждения о векторах сводятся к вычислениям, в которых участвуют компоненты этих векторов. Следующее предложение показывает, как производятся линейные операции над векторами, если известны их компоненты.
Утверждение 5.
При умножении вектора на число все его компоненты умножаются на это число. При сложении векторов складываются их соответствующие компоненты.
Доказательство.
Действительно, если (boldsymbol{a} = alpha_{1}boldsymbol{e_{1}} + alpha_{2}boldsymbol{e_{2}} + alpha_{3}boldsymbol{e_{3}}), то
$$
lambdaboldsymbol{a} = lambda(alpha_{1}boldsymbol{e_{1}} + alpha_{2}boldsymbol{e_{2}} + alpha_{3}boldsymbol{e_{3}}) = (lambdaalpha_{1})boldsymbol{e_{1}} + (lambdaalpha_{2})boldsymbol{e_{2}} + (lambdaalpha_{3})boldsymbol{e_{3}}.nonumber
$$
Если (boldsymbol{a} = alpha_{1}boldsymbol{e_{1}} + alpha_{2}boldsymbol{e_{2}} + alpha_{3}boldsymbol{e_{3}}) и (boldsymbol{b} = beta_{1}boldsymbol{e_{1}} + beta_{2}boldsymbol{e_{2}} + beta_{3}boldsymbol{e_{3}}), то
$$
boldsymbol{a} + boldsymbol{b} = (alpha_{1}boldsymbol{e_{1}} + alpha_{2}boldsymbol{e_{2}} + alpha_{3}boldsymbol{e_{3}}) + (beta_{1}boldsymbol{e_{1}} + beta_{2}boldsymbol{e_{2}} + beta_{3}boldsymbol{e_{3}}) =\= (alpha_{1} + beta_{1})boldsymbol{e_{1}} + (alpha_{2} + beta_{2})boldsymbol{e_{2}} + (alpha_{3} + beta_{3})boldsymbol{e_{3}}.nonumber
$$
Для одномерного и двумерного пространств доказательство отличается только числом слагаемых.
Вектор, его направление и длина
Вектором называется упорядоченная пара точек. Первая точка называется началом вектора, вторая — концом вектора. Расстояние между началом и концом вектора называется его длиной. Вектор, начало и конец которого совпадают, называется нулевым, его длина равна нулю. Если длина вектора положительна, то его называют ненулевым. Ненулевой вектор можно определить также как направленный отрезок, т.е. отрезок, у которого одна из ограничивающих его точек считается первой (началом вектора), а другая — второй (концом вектора). Направление нулевого вектора, естественно, не определено.
Вектор с началом в точке и концом в точке
обозначается
и изображается стрелкой, обращенной острием к концу вектора (рис.1.1,а). Начало вектора называют также его точкой приложения. Говорят, что вектор
приложен к точке
. Длина вектора
или
равна длине отрезка
или
и обозначается
или
. Имея в виду это обозначение, длину вектора называют также модулем, абсолютной величиной. Нулевой вектор, например
, обозначается символом
и изображается одной точкой (точка
на рис.1.1,а). Вектор, длина которого равна единице или принята за единицу, называется единичным вектором.
Ненулевой вектор АВ кроме направленного отрезка определяет также содержащие его луч (с началом в точке
) и прямую
(рис.1.1,а).
Коллинеарные векторы
Два ненулевых вектора называются коллинеарными, если они принадлежат либо одной прямой, либо — двум параллельным прямым, в противном случае они называются неколлинеарными. Коллинеарность векторов обозначается знаком . Поскольку направление нулевого вектора не определено, он считается коллинеарным любому вектору. Каждый вектор коллинеарен самому себе.
Два ненулевых коллинеарных вектора называются одинаково направленными (сонаправленными), если они принадлежат параллельным прямым и их концы лежат в одной полуплоскости от прямой, проходящей через их начала (рис.1.2,а); либо, если векторы принадлежат одной прямой, и луч, определяемый одним вектором, целиком принадлежит лучу, определяемому другим вектором (рис. 1.2,6). В противном случае коллинеарные векторы называются противоположно направленными (рис.1.2,в,г). Одинаково направленные и противоположно направленные векторы обозначаются парами стрелок и
соответственно. Понятия коллинеарных, одинаково направленных векторов распространяются на любое число векторов.
Компланарные векторы
Три ненулевых вектора называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях (рис.1.3,а), в противном случае они называются некомпланарными (рис. 1.3,6). Так как направление нулевого вектора не определено, он считается компланарным с любыми двумя векторами. Понятие компланарных векторов распространяется на любое число векторов.
Равные векторы
Два вектора называются равными, если они:
а) коллинеарны, одинаково направлены;
б) имеют равные длины.
Все нулевые векторы считаются равными друг другу.
Это определение равенства векторов характеризует так называемые свободные векторы. Данный свободный вектор можно переносить, не меняя его направления и длины, в любую точку пространства (откладывать от любой точки), при этом будем получать векторы, равные данному. Таким образом, свободный вектор определяет целый класс равных ему векторов, отличающихся только точкой приложения. Далее будут рассматриваться, как правило, свободные векторы, при этом слово “свободные” будет опускаться.
Замечания 1.1.
1. Определение равенства векторов можно сформулировать, не используя понятия длины вектора. Два вектора и
, не лежащие на одной прямой, называются равными, если четырехугольник
является параллелограммом (рис.1.4,а). Векторы
и
, принадлежащие одной прямой, считаются равными, если существует равный им вектор
, не принадлежащий этой прямой (рис. 1.4,6). Это определение эквивалентно следующему: два вектора
и
называются равными, если середины отрезков
и
совпадают (рис. 1.4,в).
2. Отношение равенства векторов является отношением эквивалентности. В самом деле, для отношения равенства (
— “вектор
равен вектору
“), определенного на множестве упорядоченных пар
векторов, выполняются следующие условия:
а) каждый вектор равен самому себе (рефлексивность);
б) если вектор равен вектору
, то вектор
равен вектору
(симметричность);
в) если вектор равен вектору
и вектор
равен вектору
, то вектор
равен вектору
(транзитивность).
Это означает, что множество векторов разбивается на непересекающиеся классы (см. разд.В.З), т.е. с каждым вектором связывается целый класс равных ему векторов, отличающихся только точками приложения. Поэтому говорят [37], что свободный вектор определяет класс равных ему векторов.
3. Для любой точки и любого вектора
существует единственная точка
, для которой
. В самом деле, если вектор
ненулевой, то через точку
проходит единственная прямая, параллельная вектору
(рис.1.5,а), либо его содержащая (рис. 1.5,б). На этой прямой существуют две точки, удаленные от точки
на расстояние
. Из этих двух точек выберем такую точку
, для которой векторы
и
оказываются одинаково направленными. По построению получаем
. Если вектор
нулевой, то искомая точка
совпадает с данной точкой
.
Таким образом, любой вектор ставит в соответствие каждой точке
единственную точку
такую, что
. Это соответствие называют параллельным переносом. Поэтому свободный вектор можно отождествить с параллельным переносом.
4. Построение, рассмотренное в пункте 3, называется откладыванием вектора от точки
или приложением вектора
к точке
.
Используя это построение, можно дать эквивалентные определения коллинеарности и компланарности. Два ненулевых вектора называются коллинеарными, если после приложения их к одной точке они лежат на одной прямой. Три ненулевых вектора называются компланарными, если после приложения их к одной точке они лежат в одной плоскости.
5. Кроме свободных векторов в приложениях векторной алгебры используются скользящие векторы, связанные (приложенные) векторы и др., которые отличаются от свободных векторов определением равенства. Например, скользящие векторы называются равными, если они лежат на одной прямой, одинаково направлены и имеют равные длины. Другими словами, в отличие от свободного вектора, скользящий вектор можно переносить, не меняя направления и длины, только вдоль содержащей этот вектор прямой. Например, в механике сила, действующая на абсолютно твердое тело, изображается скользящим вектором, а угловая скорость — свободным вектором. Сила, действующая на деформируемое тело, является примером так называемого приложенного вектора. Изменение точки приложения силы приведет к изменению ее воздействия на тело.
Пример 1.1. Дан треугольник (рис. 1.6), точки
— середины его сторон. Для векторов, изображенных на рис. 1.6, указать коллинеарные, одинаково направленные, противоположно направленные, равные.
Решение. По теореме о средней линии треугольника заключаем, что . Поэтому векторы
— коллинеарные (так как лежат на одной или параллельных прямых), одинаково направленные и имеют равные длины. Следовательно, это равные векторы:
. Аналогично, находим
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
