Метод вращения вокруг оси
Одним из наиболее эффективных методов определения метрических характеристик плоских фигур является вращение вокруг оси, в качестве которой обычно используют линию уровня или проецирующую прямую.
Содержание
- Способ вращения вокруг проецирующей прямой
- Способ вращения вокруг линии уровня
Способ вращения вокруг проецирующей прямой
Перемещение точки при её вращении вокруг проецирующей прямой является частным случаем параллельного перемещения и подчиняется следующим правилам.
- Траектория движения точки – дуга окружности с центром, расположенным на оси вращения. Радиус окружности равен расстоянию между точкой и осью вращения.
- При вращении точки вокруг прямой, перпендикулярной фронтальной плоскости проекции, фронтальная проекция точки перемещается по дуге окружности, а горизонтальная – параллельно оси X.
- При вращении точки вокруг прямой, перпендикулярной горизонтальной плоскости проекции, горизонтальная проекция точки перемещается по дуге окружности, а фронтальная – параллельно оси X.
Руководствуясь рассмотренными правилами, повернем отрезок CD в положение, параллельное фронтальной плоскости проекции. В качестве оси вращения i будем использовать горизонтально проецирующую прямую, проведенную через точку D.

При повороте отрезка положение точки D не изменится, поскольку она лежит на оси i. Точку C’ переместим по дуге окружности радиусом C’D’ в положение C’1 так, чтобы выполнялось условие C’1D’1 || X. Для нахождения точки C”1 из C” проведем прямую, параллельную оси X, до пересечения её с линией связи, восстановленной из т. C’1.
На следующем рисунке показан способ перевода отрезка в горизонтально проецирующее положение. Построения выполнены в два этапа и описаны ниже.

Сначала вращением вокруг оси i1 CD перемещают в положение C1D1, параллельное фронтальной плоскости проекции. После этого вращением вокруг оси i2 отрезок переводится в искомое положение C2D2, где он перпендикулярен горизонтальной плоскости проекции.
Расположение осей вращения выбирают исходя из удобства дальнейших построений. В нашей задаче горизонтально проецирующая прямая i1 проходит через точку D, а проекция i”2 фронтально проецирующей прямой i2 лежит на продолжении отрезка C”1D”1.
Способ вращения вокруг линии уровня
Действенным и наиболее рациональным приемом решения задач, в которых требуется определить натуральную величину угла, является способ вращения вокруг линии уровня.
Основные правила построения
- Радиус вращения точки равен расстоянию между точкой и линией уровня, выполняющей роль оси. Натуральную величину радиуса определяют методом прямоугольного треугольника.
- При вращении вокруг горизонтали h точка перемещается по окружности, которая проецируется на горизонтальную плоскость в отрезок прямой, перпендикулярный горизонтальной проекции горизонтали h’. На фронтальную плоскость окружность, по которой движется точка, проецируется в эллипс. Строить его нет необходимости.
- При вращении вокруг фронтали f точка перемещается по окружности, которая проецируется на фронтальную плоскость в отрезок прямой, перпендикулярный фронтальной проекции фронтали f”. Вместе с тем горизонтальная проекция линии перемещения представляет собой эллипс, строить который не обязательно.
Рассмотрим, как определить действительную величину угла между прямыми a и b, пересекающимися в точке A. Построения представлены на рисунке и выполнены согласно алгоритму, который описан ниже.

Алгоритм решения
- Проводим фронтальную проекцию h” горизонтали h. Она пересекает прямые a” и b” в точках 1” и 2”. Определяем горизонтальные проекции 1′ и 2′ и через них проводим h’.
- Находим центр вращения O. Его горизонтальная проекция O’ лежит на пересечении прямой h’ с перпендикуляром, проведенным из A’ к h’.
- Определяем натуральную величину радиуса вращения R = O’A’0. Для этого строим прямоугольный треугольник O’A’A’0, катет которого A’A’0 равен расстоянию от A” до h”.
- Проводим дугу окружности радиусом R до пересечения её с прямой O’A’ в точке A’1. Соединяем A’1 с точками 1′ и 2′. Искомый угол ϕ построен.
Содержание:
Способы преобразования проекций:
Задачи, связанные с определением истинных размеров изображённых геометрических элементов, решаются способом преобразования проекций. Он основан на переходе от общих случаев к частным случаям положения этих элементов по отношению к плоскостям проекций. Такой переход можно осуществить:
- изменением положения рассматриваемого геометрического элемента по отношению к неизменной системе плоскостей проекций;
- переменной плоскостей проекций при неизменном положении рассматриваемого геометрического элемента в пространстве.
Способы преобразования проекций
Критерием рациональности решения графических задач является максимальная точность и наглядность, достигнутая при минимальном объеме построений.
Решение, как правило, получается наиболее простым и наглядным, если объекты проецирования занимают одно из частных положений относительно плоскостей проекций. В начертательной геометрии разработан ряд способов, позволяющих любую конкретную графическую задачу привести к частному виду и применить типовой алгоритм ее решения.
Это можно сделать двумя способами:
- изменить положение в пространстве рассматриваемого геометрического элемента путем его вращения вокруг одной или нескольких осей, оставив неизменным положение плоскостей проекций;
- ввести одну или несколько дополнительных плоскостей проекций, оставив неизменным положение геометрического элемента.
Рассмотрим оба способа на конкретных примерах.
Метод вращения
Сущность метода заключается в том, что заданный геометрический элемент вращением вокруг некоторой неподвижной примой (оси вращения) приводят в положение, удобное для решения поставленной задачи.
Ось вращения может быть выбрана произвольно, но чаще всего её располагают параллельно или перпендикулярно к плоскости проекций.
Рассмотрим случай вращения точки вокруг оси, перпендикулярной к плоскости 
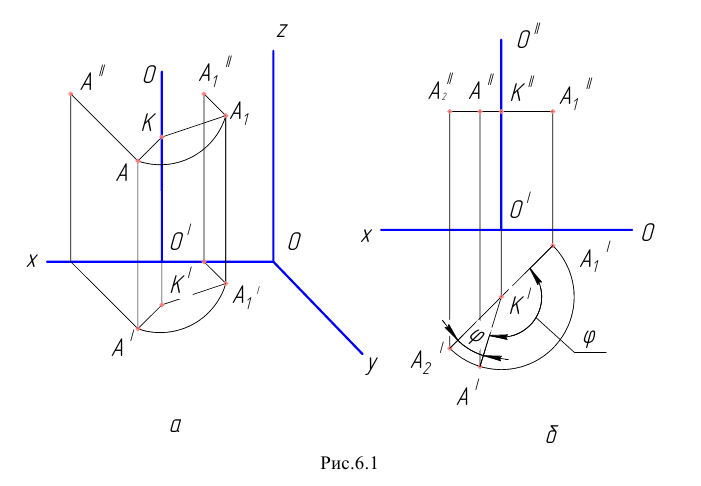
Пусть даны (см. Рнс.6.1, а) косоугольная проекция точки А, её вторичные проекции  и
и  , косоугольная проекция прямой
, косоугольная проекция прямой  , перпендикулярной к плоскости
, перпендикулярной к плоскости  и её проекция на плоскость (точка
и её проекция на плоскость (точка  ). Будем вращать вокруг прямой
). Будем вращать вокруг прямой  точку А. При этом она будет перемещаться по окружности в плоскости, перпендикулярной к этой прямой. Радиусом данной окружности является перпендикуляр, опущенный из точки на прямую. В нашем случае точка А будет вращаться по окружности в плоскости, параллельной плоскости
точку А. При этом она будет перемещаться по окружности в плоскости, перпендикулярной к этой прямой. Радиусом данной окружности является перпендикуляр, опущенный из точки на прямую. В нашем случае точка А будет вращаться по окружности в плоскости, параллельной плоскости  . Поэтому горизонтальную проекцию
. Поэтому горизонтальную проекцию  радиуса вращения получим, соединяя прямой точку
радиуса вращения получим, соединяя прямой точку  с точкой . Проведя
с точкой . Проведя  найдём косоугольную проекцию радиуса вращения. Пусть точка А вращением вокруг оси переместится в точку
найдём косоугольную проекцию радиуса вращения. Пусть точка А вращением вокруг оси переместится в точку  .Траектория движения в натуре – дуга окружности ( в косоугольных проекциях – часть эллипса). На плоскость
.Траектория движения в натуре – дуга окружности ( в косоугольных проекциях – часть эллипса). На плоскость  траектория движения точки спроецируется без искажения, а на плоскость
траектория движения точки спроецируется без искажения, а на плоскость  – в виде прямой, параллельной оси ох. Изображение горизонтальной проекции точки А переместится в точку
– в виде прямой, параллельной оси ох. Изображение горизонтальной проекции точки А переместится в точку  , а изображение её фронтальной проекции – в точку
, а изображение её фронтальной проекции – в точку 
Итак, при вращении точки вокруг оси, перпендикулярной к плоскости  её горизонтальная проекция перемещается по окружности, а фронтальная проекция – по прямой, параллельной оси ох.
её горизонтальная проекция перемещается по окружности, а фронтальная проекция – по прямой, параллельной оси ох.
В прямоугольных проекциях (см. Рис.6.1, б) при вращении точки  вокруг оси
вокруг оси  перпендикулярной к плоскости горизонтальная проекция точки будет перемещаться по дуге окружности радиуса
перпендикулярной к плоскости горизонтальная проекция точки будет перемещаться по дуге окружности радиуса  , а фронтальная её проекция – по прямой, параллельной оси ох.
, а фронтальная её проекция – по прямой, параллельной оси ох.
При повороте на угол  (или
(или  ) проекции
) проекции  и
и  точки переместятся, соответственно, в точки
точки переместятся, соответственно, в точки 
Аналогичными построениями можно показать, что при вращении точки вокруг оси, перпендикулярной к плоскости , фронтальная проекция точки будет перемещаться по дуге окружности, а её горизонтальная проекция – по прямой, параллельной оси ох.
Вращение отрезка прямой может быть выполнено в соответствии с правилами вращения точки. Пусть требуется повернуть на некоторый угол (прямую 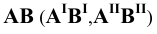 вокруг оси
вокруг оси  перпендикулярной к плоскости (см. Рис.6.2).
перпендикулярной к плоскости (см. Рис.6.2).
Переместим каждую из горизонтальных проекций точек А и В по дугам окружностей с центром в точке  на заданный угол . Соединяя полученные точки
на заданный угол . Соединяя полученные точки  и
и  прямой, получим горизонтальную проекцию отрезка АВ, повёрнутого вокруг оси о на угол . Фронтальные проекции
прямой, получим горизонтальную проекцию отрезка АВ, повёрнутого вокруг оси о на угол . Фронтальные проекции  и
и  переместятся по прямым, параллельным оси ох, и займут положения
переместятся по прямым, параллельным оси ох, и займут положения  и
и  .
.
Отметим, что при вращении отрезка прямой вокруг оси, перпендикулярной к плоскости , горизонтальная проекция его не изменяет длины, так как . Используем это обстоятельство на практике. Пусть даны
. Используем это обстоятельство на практике. Пусть даны  и ось вращения
и ось вращения  перпендикулярная к плоскости (Рис.6.3). Требуется повернуть прямую АВ вокруг оси
перпендикулярная к плоскости (Рис.6.3). Требуется повернуть прямую АВ вокруг оси  на некоторый угол
на некоторый угол  .
.
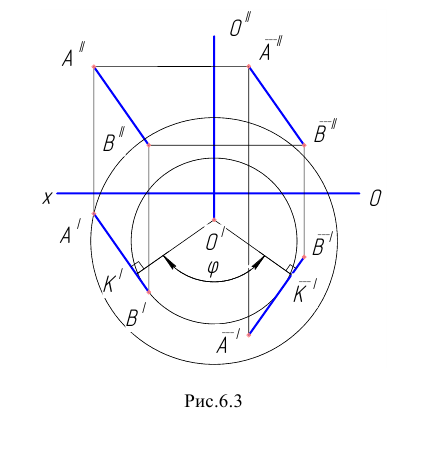
Опустим перпендикуляр из горизонтальной проекции оси вращения на горизонтальную проекцию отрезка. Полученную точку  повернём вокруг оси на угол Через точку
повернём вокруг оси на угол Через точку  проведём прямую, перпендикулярную к
проведём прямую, перпендикулярную к , на которой отложим отрезки
, на которой отложим отрезки  и
и  соответственно равные отрезкам
соответственно равные отрезкам  и
и  . Получим новую горизонтальную проекцию
. Получим новую горизонтальную проекцию  отрезка АВ. Фронтальная проекция
отрезка АВ. Фронтальная проекция  строится по аналогии с предыдущим примером.
строится по аналогии с предыдущим примером.
Наиболее просто вращение отрезка осуществляется вокруг оси, пересекающей этот отрезок, так как точка их пересечения остаётся неподвижной.
Определим методом вращения истинную длину отрезка 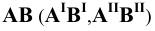 прямой общего положения (Рис.6.4). Для этого следует повернуть заданный отрезок так, чтобы он расположился параллельно какой – либо плоскости координат. Проведём ось вращения перпендикулярно к плоскости
прямой общего положения (Рис.6.4). Для этого следует повернуть заданный отрезок так, чтобы он расположился параллельно какой – либо плоскости координат. Проведём ось вращения перпендикулярно к плоскости  через точку В отрезка. Фронтальная проекция оси изобразится в виде прямой
через точку В отрезка. Фронтальная проекция оси изобразится в виде прямой  , перпендикулярной к оси ох, а горизонтальная проекция её – точка
, перпендикулярной к оси ох, а горизонтальная проекция её – точка  , совпадает сточкой
, совпадает сточкой 
При вращении отрезка АВ точка  остаётся неподвижной, а точку А переместим в положение А, когда горизонтальная проекция
остаётся неподвижной, а точку А переместим в положение А, когда горизонтальная проекция  будет параллельна оси ох. Новой фронтальной проекцией отрезка будет отрезок
будет параллельна оси ох. Новой фронтальной проекцией отрезка будет отрезок 
 В этом положении отрезок ВА параллелен плоскости
В этом положении отрезок ВА параллелен плоскости  и, следовательно, проецируется на неё в истинную длину, то есть
и, следовательно, проецируется на неё в истинную длину, то есть  – истинная длина отрезка.
– истинная длина отрезка.
Отметим, что при определении истинной длины отрезка методом вращения одновременно определяется угол наклона этого отрезка к одной из плоскостей координат. В нашем случае угол  – угол наклона отрезка АВ к плоскости
– угол наклона отрезка АВ к плоскости  . Для определения угла наклона отрезка прямой к плоскости
. Для определения угла наклона отрезка прямой к плоскости  следует его вращать вокруг оси, перпендикулярной к плоскости
следует его вращать вокруг оси, перпендикулярной к плоскости  так, чтобы он расположился параллельно плоскости .
так, чтобы он расположился параллельно плоскости .
Для того чтобы повернуть плоскость вокруг некоторой оси, достаточно повернуть вокруг неё геометрические элементы, определяющие её положение. Пусть требуется повернуть плоскость  общего положения вокруг оси
общего положения вокруг оси перпендикулярной к плоскости на некоторый угол
перпендикулярной к плоскости на некоторый угол  (Рис.6.5).
(Рис.6.5).
Для получения изображения горизонтального следа плоскости  повёрнутой вокруг оси , опустим перпендикуляр из горизонтальной проекции
повёрнутой вокруг оси , опустим перпендикуляр из горизонтальной проекции  оси вращения на след
оси вращения на след  Полученную точку
Полученную точку  повернём вокруг оси на угол
повернём вокруг оси на угол  и, через точку
и, через точку  проведём прямую, перпендикулярную к
проведём прямую, перпендикулярную к  Эта прямая и будет новым горизонтальным следом
Эта прямая и будет новым горизонтальным следом  . В точке пересечения
. В точке пересечения  с осью ох найдём новую точку схода следов
с осью ох найдём новую точку схода следов  . Для построения нового фронтального следа необходимо найти ещё одну точку, принадлежащую этому следу. Такой точкой будет фронтальная проекция фронтального следа любой прямой, лежащей в плоскости
. Для построения нового фронтального следа необходимо найти ещё одну точку, принадлежащую этому следу. Такой точкой будет фронтальная проекция фронтального следа любой прямой, лежащей в плоскости  в новом её положении. Обычно в качестве такой прямой берут горизонталь
в новом её положении. Обычно в качестве такой прямой берут горизонталь  , пересекающую ось вращения. Новой горизонтальной проекцией горизонтали будет прямая
, пересекающую ось вращения. Новой горизонтальной проекцией горизонтали будет прямая  проведённая через точку
проведённая через точку  параллельно следу
параллельно следу  . Новой фронтальной проекцией горизонтали будет прямая
. Новой фронтальной проекцией горизонтали будет прямая  , на которой нетрудно найти точку
, на которой нетрудно найти точку  – новый фронтальный след горизонтали. Новый фронтальный след
– новый фронтальный след горизонтали. Новый фронтальный след  плоскости получим, проведя прямую через точки
плоскости получим, проведя прямую через точки  и
и  .
.
Построение нового фронтального следа плоскости значительно упрощается, если ось вращения перпендикулярна к плоскости  и лежит в плоскости
и лежит в плоскости  .
.
В этом случае новый горизонтальный след  плоскости
плоскости  повёрнутой вокруг оси, находится так же, как и в предыдущем примере
повёрнутой вокруг оси, находится так же, как и в предыдущем примере  и
и  Второй точкой ( кроме
Второй точкой ( кроме  ) для проведения нового фронтального следа плоскости
) для проведения нового фронтального следа плоскости  будет точка
будет точка  так как она не изменяет своего положения при повороте следа.
так как она не изменяет своего положения при повороте следа.
Вращение плоскости вокруг осей, перпендикулярных к плоскостям координат, осуществляют при решении задач приведения плоскости общего положения в частное положение, например, перпендикулярное одной из плоскостей проекций.
Рассмотрим случай вращения плоскости, заданной плоской фигурой, например треугольником ABC (Рис.6.7). Требуется методом вращения эту плоскость фронтально – проецирующей. Вращение такой плоскости может быть осуществлено, в частности, вращением трёх вершин треугольника. Однако с целью упрощения построений ось вращения проводят через одну из вершин плоской фигуры. Угол, на который следует повернуть треугольник, определяется из условия, что любая горизонталь фронтально – проецирующей плоскости перпендикулярна к плоскости  т.е. проецируется на плоскость
т.е. проецируется на плоскость  в точку. Проведём через вершину С треугольника горизонталь
в точку. Проведём через вершину С треугольника горизонталь  и повернём её вокруг оси
и повернём её вокруг оси  , проходящей через точку С, на такой угол, при котором её горизонтальная проекция
, проходящей через точку С, на такой угол, при котором её горизонтальная проекция  будет перпендикулярна к оси ох. Далее вращением вокруг оси
будет перпендикулярна к оси ох. Далее вращением вокруг оси  горизонтальные проекции
горизонтальные проекции  и
и  точек А и В на тот же угол. Это построение проще выполнить, проведя из точки С, как из центра, дуги окружностей радиусами
точек А и В на тот же угол. Это построение проще выполнить, проведя из точки С, как из центра, дуги окружностей радиусами  и
и  и сделав на этих дугах засечки из точки
и сделав на этих дугах засечки из точки  радиусами
радиусами 
Треугольник  будет искомой горизонтальной проекцией треугольника после его вращения. Построив новые фронтальные проекции точек А и В в соответствии с правилами, рассмотренными ранее, получим новую фронтальную проекцию треугольника ABC в виде прямой линии
будет искомой горизонтальной проекцией треугольника после его вращения. Построив новые фронтальные проекции точек А и В в соответствии с правилами, рассмотренными ранее, получим новую фронтальную проекцию треугольника ABC в виде прямой линии  .
.
Если необходимо сделать плоскость общего положения горизонтально-проецирующей, то следует её вращать вокруг оси, перпендикулярной к плоскости  до положения, при котором фронтальный след плоскости или фронтальная проекция любой её фронтали будут перпендикулярны к оси ох .
до положения, при котором фронтальный след плоскости или фронтальная проекция любой её фронтали будут перпендикулярны к оси ох .
Метод вращения позволяет сделать плоскость общего положения, параллельной плоскости координат. Это можно осуществить двумя способами:
- последовательным вращением плоскости вокруг осей, перпендикулярных к плоскостям проекций;
- вращением плоскости вокруг горизонтали или фронтали.
Не рассматривая подробно первый способ, отметим лишь возможность его применения в предыдущей задаче (см. Рис.6.7), где полученную фронтально – проецирующую плоскость (треугольника  ) можно повернуть ещё раз вокруг оси, перпендикулярной к плоскости проходящей, например, через точку А до положения, параллельного плоскости
) можно повернуть ещё раз вокруг оси, перпендикулярной к плоскости проходящей, например, через точку А до положения, параллельного плоскости  В этом положении треугольник спроецируется на плоскость
В этом положении треугольник спроецируется на плоскость  в истинную величину
в истинную величину 
Установим, как перемещаются проекции точек при вращении вокруг произвольной горизонтали. При вращении точки  вокруг горизонтали MN (см. Рис.6.8) точка В будет перемещатся по дуге окружности в плоскости, проходящей через точку В и перпендикулярной к MN, т.е. в горизонтально – проецирующей плоскости
вокруг горизонтали MN (см. Рис.6.8) точка В будет перемещатся по дуге окружности в плоскости, проходящей через точку В и перпендикулярной к MN, т.е. в горизонтально – проецирующей плоскости  Горизонтальнай след
Горизонтальнай след  этой плоскости проходит через точку
этой плоскости проходит через точку  и перпендикулярен к горизонтальной проекции
и перпендикулярен к горизонтальной проекции  горизонтали. Радиусом вращения точки В будет перпендикуляр ВО, опущенный из точки В на MN.
горизонтали. Радиусом вращения точки В будет перпендикуляр ВО, опущенный из точки В на MN.
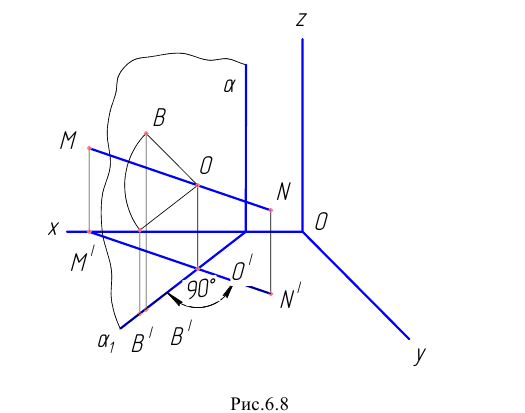
Если привести радиус вращения ВО в положение, параллельное плоскости  то он спроецируется на эту плоскость отрезком
то он спроецируется на эту плоскость отрезком  совпадающим со следом
совпадающим со следом  и по длине равным ВО.
и по длине равным ВО.
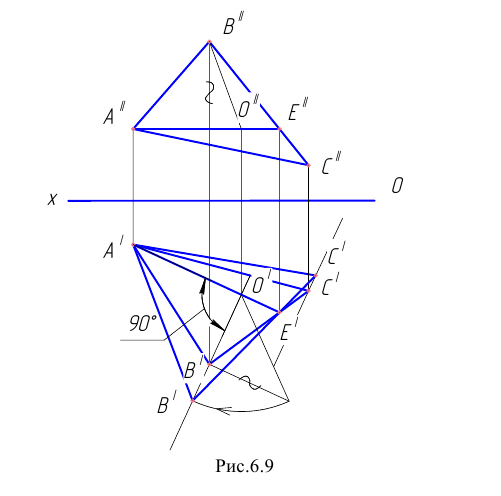
Рассмотрим задачу определения истинной величины плоской фигуры вращением вокруг горизонтали. Пусть задан треугольник ABC (см. Рис.6.9) двумя проекциями  или
или  Требуется определить его истинную величину. Осью вращения выбираем горизонталь
Требуется определить его истинную величину. Осью вращения выбираем горизонталь  Для определения истинной величины треугольника следует привести его вращением вокруг горизонтали АЕ в положение, параллельное плоскости
Для определения истинной величины треугольника следует привести его вращением вокруг горизонтали АЕ в положение, параллельное плоскости  . Новой фронтальной проекцией треугольника будет прямая, совпадающая с фронтальной проекцией горизонтали (на Рис.6.9 не показана). Построим новую горизонтальную проекцию треугольника ABC. Для этого сначала найдём новую горизонтальную проекцию
. Новой фронтальной проекцией треугольника будет прямая, совпадающая с фронтальной проекцией горизонтали (на Рис.6.9 не показана). Построим новую горизонтальную проекцию треугольника ABC. Для этого сначала найдём новую горизонтальную проекцию  вершины В. Радиус вращения точки В в начальном положении треугольника проецируется на плоскость
вершины В. Радиус вращения точки В в начальном положении треугольника проецируется на плоскость  отрезком
отрезком  , перпендикулярным к
, перпендикулярным к  а на плоскость
а на плоскость  – отрезком
– отрезком  Когда точка В расположится в плоскости, параллельной плоскости
Когда точка В расположится в плоскости, параллельной плоскости  и проходящей через горизонталь АЕ, радиус
и проходящей через горизонталь АЕ, радиус  спроецируется на плоскость
спроецируется на плоскость  отрезком
отрезком  , перпендикулярным к
, перпендикулярным к  и равным собственной длине. Последнюю обычно определяют способом треугольника, откладывая на перпендикуляре к
и равным собственной длине. Последнюю обычно определяют способом треугольника, откладывая на перпендикуляре к  разность недостающих координат ( прямые, отмеченные волнистым знаком ~ ). Полученная точка
разность недостающих координат ( прямые, отмеченные волнистым знаком ~ ). Полученная точка  будет новой искомой горизонтальной проекцией вершины В треугольника. Так как точка Е стороны ВС неподвижна, то точка
будет новой искомой горизонтальной проекцией вершины В треугольника. Так как точка Е стороны ВС неподвижна, то точка  найдётся в пересечении продолжения
найдётся в пересечении продолжения  с продолжением перпендикуляра, опущенного из точки
с продолжением перпендикуляра, опущенного из точки  на
на  Новая горизонтальная проекция
Новая горизонтальная проекция  вершины А совпадает с точкой
вершины А совпадает с точкой 
Треугольник  является искомой истинной величиной треугольника ABC.
является искомой истинной величиной треугольника ABC.
Вращение вокруг фронтали по существу аналогично вращению вокруг горизонтали. При этом такую фигуру располагают в плоскости, параллельной плоскости  и строят её новую фронтальную проекцию.
и строят её новую фронтальную проекцию.
Метод перемены плоскостей проекций
Сущность метода заключается в том, что заданный геометрический элемент проецируется на новую плоскость проекций, обычно перпендикулярную к одной из старых плоскостей проекций. Новая плоскость проекций выбирается так, чтобы рассматриваемый элемент проецировался на неё наиболее удобно для решения поставленной задачи.
Методом перемены плоскостей проекций в большинстве случаев решают задачи по определению расстояний между заданными геометрическими элементами и определению истинных размеров плоских фигур.
Построение проекций геометрических элементов на новой плоскости проекций начнём с примера построения проекций точки.
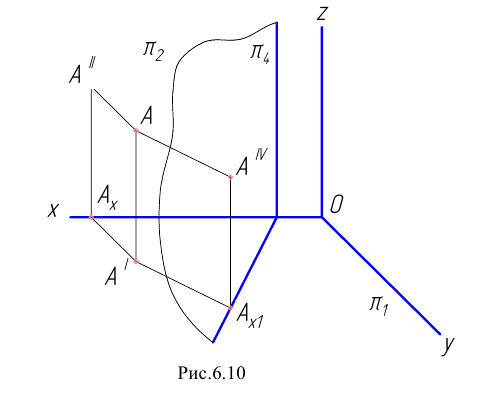
Пусть в косоугольных проекциях (Рис.6.10) даны плоскости  и
и  и точка А. Требуется построить проекцию точки А на новую фронтальную плоскость
и точка А. Требуется построить проекцию точки А на новую фронтальную плоскость  перпендикулярную к плоскости Линия пересечения плоскостей и
перпендикулярную к плоскости Линия пересечения плоскостей и  будет новой осью проекций
будет новой осью проекций  Построим сначала изображение проекции точки А на плоскость
Построим сначала изображение проекции точки А на плоскость  для чего покажем на чертеже изображение перпендикуляра, опущенного из горизонтальной проекции
для чего покажем на чертеже изображение перпендикуляра, опущенного из горизонтальной проекции  на ось ох (в натуре
на ось ох (в натуре  Точку
Точку  получим в пересечении перпендикуляра, восстановленного из точки
получим в пересечении перпендикуляра, восстановленного из точки  к оси
к оси  с перпендикуляром, опущенным из точки А на плоскость
с перпендикуляром, опущенным из точки А на плоскость 
Изображение проекции точки А на плоскость строится в той же последовательности. Строим изображение перпендикуляра, опущенного из горизонтальной проекции  на новую ось проекций
на новую ось проекций  (в натуре
(в натуре  и находим изображение искомой проекции точки
и находим изображение искомой проекции точки  на новой фронтальной плоскости , проводя
на новой фронтальной плоскости , проводя 
Отметим, что  т.е. при перемене плоскости
т.е. при перемене плоскости  ни новую фронтальную плоскость проекций, перпендикулярную к плоскости
ни новую фронтальную плоскость проекций, перпендикулярную к плоскости  , координата
, координата  проецируемой точки остаётся неизменной.
проецируемой точки остаётся неизменной.
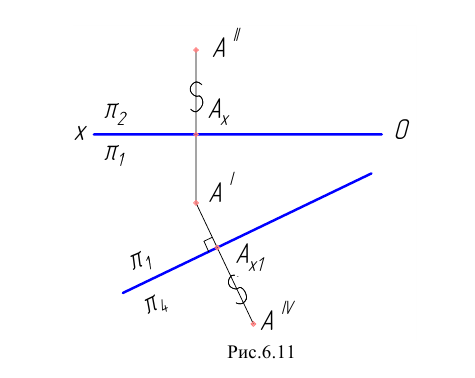
Рассмотрим решение задачи в прямоугольных проекциях. Пусть задана точка  в системе плоскостей
в системе плоскостей  и
и  (см. Рис.6.11). Требуется построить проекцию точки А на новую плоскость проекций, перпендикулярную к плоскости
(см. Рис.6.11). Требуется построить проекцию точки А на новую плоскость проекций, перпендикулярную к плоскости  Проведём произвольную прямую и примем её за новую ось проекций
Проведём произвольную прямую и примем её за новую ось проекций  Новую плоскость проекций
Новую плоскость проекций  совместим с плоскостью чертежа вращением вокруг оси Это вращение обычно производится так, чтобы избежать наложения дополнительного изображения на основные проекции. Новую фронтальную проекцию
совместим с плоскостью чертежа вращением вокруг оси Это вращение обычно производится так, чтобы избежать наложения дополнительного изображения на основные проекции. Новую фронтальную проекцию  получим, откладывая на продолжении перпендикуляра, опущенного из горизонтальной проекции
получим, откладывая на продолжении перпендикуляра, опущенного из горизонтальной проекции  на ось
на ось  отрезок
отрезок 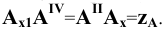
Построение проекций точек на новую плоскость проекций, перпендикулярную к плоскости  осуществляют в аналогичной последовательности.
осуществляют в аналогичной последовательности.
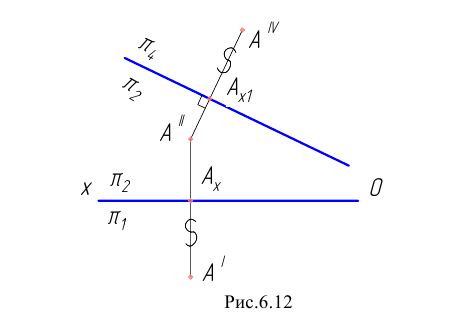
Пусть требуется построить новую проекцию точки  на горизонтальной плоскости проекций
на горизонтальной плоскости проекций  перпендикулярной к плоскости
перпендикулярной к плоскости  (см. Рис.6.12). Проведём новую произвольную ось проекций
(см. Рис.6.12). Проведём новую произвольную ось проекций  . Из фронтальной проекции
. Из фронтальной проекции  опускаем перпендикуляр на
опускаем перпендикуляр на  и на его продолжении откладываем отрезок
и на его продолжении откладываем отрезок 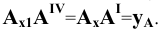 Проекция
Проекция  точки А называется новой горизонтальной проекцией точки. Отметим, что при перемене плоскости
точки А называется новой горизонтальной проекцией точки. Отметим, что при перемене плоскости  на новую плоскость проекций, перпендикулярную к плоскости
на новую плоскость проекций, перпендикулярную к плоскости  остаётся неизменной координата
остаётся неизменной координата  проецируемой точки.
проецируемой точки.
Рассмотрим пример построения новых проекций точки при последовательной перемене двух плоскостей проекций. Пусть дана точка  в системе плоскостей и (см. Рис.6. 13).
в системе плоскостей и (см. Рис.6. 13).
Новые проекции точки А будем строить, последовательно заменяя плоскость  на плоскость
на плоскость  а затем плоскость
а затем плоскость  на
на  Для этого проведём новую ось проекции
Для этого проведём новую ось проекции  и на перпендикуляре, опущенном из точки
и на перпендикуляре, опущенном из точки  на
на  отложим
отложим  В системе
В системе  координата
координата  а координата
а координата  Далее заменим плоскость
Далее заменим плоскость  на плоскость
на плоскость  Проведём новую ось проекции
Проведём новую ось проекции  и на перпендикуляре, опущенном из точки А на ось
и на перпендикуляре, опущенном из точки А на ось  , отложим отрезок
, отложим отрезок  Точка
Точка  новая горизонтальная проекция точки А. Таким образом, в результате последовательной перемены двух плоскостей проекций осуществлён переход от системы плоскостей
новая горизонтальная проекция точки А. Таким образом, в результате последовательной перемены двух плоскостей проекций осуществлён переход от системы плоскостей  и
и  к системе плоскостей
к системе плоскостей  и
и  в которой точка задана проекциями
в которой точка задана проекциями  и
и 
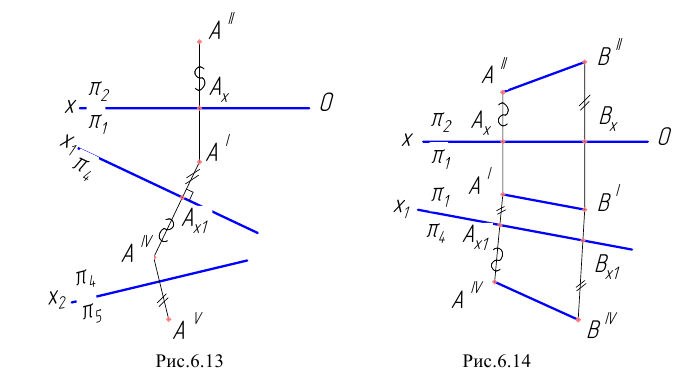
Решение задач методом перемены плоскостей проекций предусматривает, как правило, проецирование прямой на новую плоскость проекций, параллельную или перпендикулярную к ней (прямой).
Пусть требуется определить истинную длину отрезка  прямой общего положения (см. Рис.6. 14).
прямой общего положения (см. Рис.6. 14).
Для этого спроецируем заданный отрезок на новую плоскость проекций, параллельную ему и перпендикулярную, например, к плоскости  Новые фронтальные проекции точек А и В находим, откладывая на перпендикулярах, опущенных из точек
Новые фронтальные проекции точек А и В находим, откладывая на перпендикулярах, опущенных из точек  и
и  на ось
на ось  отрезки
отрезки 
Отрезок  равен истинной длине отрезка АВ, так как в системе плоскостей
равен истинной длине отрезка АВ, так как в системе плоскостей  Необходимо отметить, что если концы заданного отрезка (точки А и В) имеют разные по знаку координаты, то значения этих координат откладываются в противоположные стороны по отношению к новой оси проекций.
Необходимо отметить, что если концы заданного отрезка (точки А и В) имеют разные по знаку координаты, то значения этих координат откладываются в противоположные стороны по отношению к новой оси проекций.
Рассмотрим пример преобразования отрезка прямой общего положения в отрезок, перпендикулярный к новой плоскости проекций. Эту задачу можно решить последовательной переменой двух плоскостей проекций. Сначала заданную прямую проецируют на плоскость, параллельную этой прямой и перпендикулярную к одной из плоскостей проекций, а затем – на плоскость, перпендикулярную к прямой и к предыдущей плоскости проекций.
Пусть задан отрезок  прямой общего положения (см. Рис.6.15).
прямой общего положения (см. Рис.6.15).
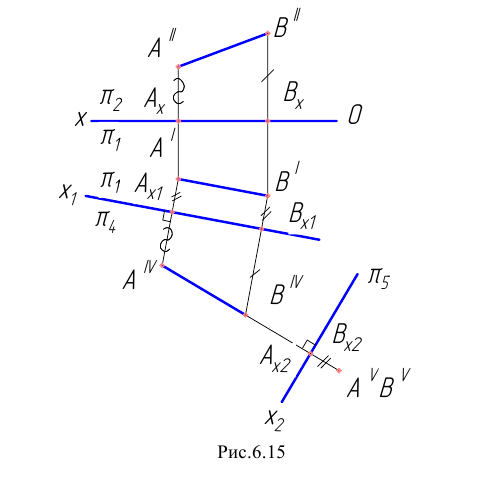
Требуется сделать эту прямую перпендикулярной к новой плоскости проекций. Для этого спроецируем заданный отрезок на плоскость  параллельную ему и перпендикулярную к плоскости
параллельную ему и перпендикулярную к плоскости  Новой фронтальной проекцией отрезка АВ будет
Новой фронтальной проекцией отрезка АВ будет  Далее заменим плоскость
Далее заменим плоскость  на новую
на новую  , перпендикулярную к отрезку и к плоскости
, перпендикулярную к отрезку и к плоскости  т.е. проведём
т.е. проведём  При перемене горизонтальной плоскости проекций неизменными будут координаты у точек А и В. Новые горизонтальные проекции
При перемене горизонтальной плоскости проекций неизменными будут координаты у точек А и В. Новые горизонтальные проекции  и
и  расположатся на общем перпендикуляре к
расположатся на общем перпендикуляре к  и на одинаковом расстоянии от
и на одинаковом расстоянии от 

Перейдём к построению методом перемены плоскостей проекций новых проекций плоскости. Пусть дано косоугольное изображение плоскости общего положения  в системе плоскостей
в системе плоскостей  и
и  (см- Рис.6.16).
(см- Рис.6.16).
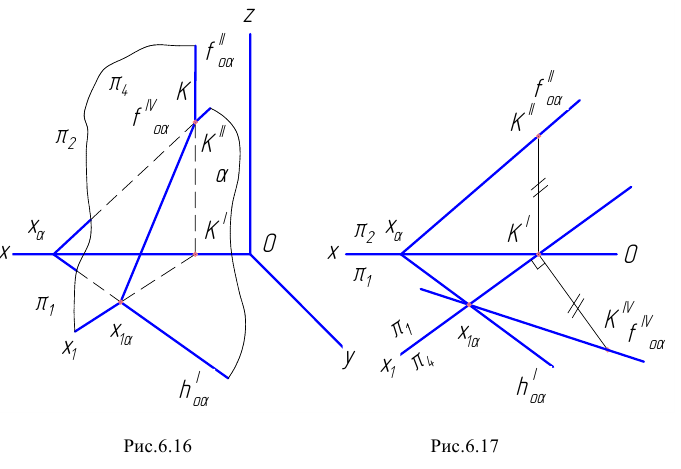
Требуется построить изображение плоскости  в системе плоскостей
в системе плоскостей  и
и  , задав плоскость следами. Изобразим на чертеже произвольную плоскость
, задав плоскость следами. Изобразим на чертеже произвольную плоскость  , перпендикулярную к плоскости . Её горизонтальный след будет новой осью проекций
, перпендикулярную к плоскости . Её горизонтальный след будет новой осью проекций  . След
. След  сохранится прежним. Новым фронтальным следом плоскости а будет линия пересечения плоскостей и . Изображение этого следа
сохранится прежним. Новым фронтальным следом плоскости а будет линия пересечения плоскостей и . Изображение этого следа  получим, соединяя прямой точки пересечения соответствующих следов данных плоскостей
получим, соединяя прямой точки пересечения соответствующих следов данных плоскостей  Точка
Точка  – новая точка схода следов плоскости в системе плоскостей
– новая точка схода следов плоскости в системе плоскостей  и
и 
Покажем построение нового фронтального следа плоскости в прямоугольных проекциях. Пусть дана плоскость  в системе плоскостей
в системе плоскостей  и
и  (см. Рис.6.17). Требуется построить следы плоскости
(см. Рис.6.17). Требуется построить следы плоскости  в системе плоскостей и
в системе плоскостей и  , где
, где  – новая плоскость проекций, перпендикулярная к плоскости . Проведём произвольную прямую, пересекающую след
– новая плоскость проекций, перпендикулярная к плоскости . Проведём произвольную прямую, пересекающую след  и ось ох, и примем её за новую ось проекций
и ось ох, и примем её за новую ось проекций  . Построим новый фронтальный след плоскости а, совместив плоскость с плоскостью чертежа вращением вокруг оси
. Построим новый фронтальный след плоскости а, совместив плоскость с плоскостью чертежа вращением вокруг оси  . Точку
. Точку  схода следов имеем в пересечении следа
схода следов имеем в пересечении следа  с осью . Вторую точку
с осью . Вторую точку  следа
следа  найдём, построив новую фронтальную проекцию точки К пересечения фронтальных следов плоскостей
найдём, построив новую фронтальную проекцию точки К пересечения фронтальных следов плоскостей  и
и  Её горизонтальная проекция
Её горизонтальная проекция  расположена в точке пересечения осей
расположена в точке пересечения осей  и ох, а фронтальная проекция
и ох, а фронтальная проекция  – в пересечении перпендикуляра, восстановленного из точки к оси ох, со следом
– в пересечении перпендикуляра, восстановленного из точки к оси ох, со следом Новую фронтальную проекцию
Новую фронтальную проекцию  точки
точки  найдём, отложив на перпендикуляре к оси
найдём, отложив на перпендикуляре к оси  восстановленном из точки , значение координаты
восстановленном из точки , значение координаты  точки К. Прямая, проведённая из точки
точки К. Прямая, проведённая из точки  через точку будет новым фронтальным следом
через точку будет новым фронтальным следом  плоскости .
плоскости .
Методом перемены плоскостей проекций можно преобразовать плоскость общего положения в плоскость, проецирующую по отношению к новой плоскости проекций. Пусть требуется заданную плоскость  общего положения сделать перпендикулярной к новой плоскости проекций (см. Рис.6.18).
общего положения сделать перпендикулярной к новой плоскости проекций (см. Рис.6.18).
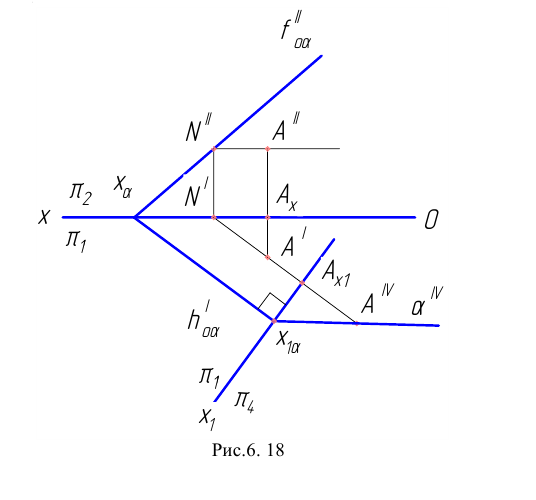
Заменим плоскость плоскостью , одновременно перпендикулярной к плоскости и к плоскости . Если плоскость перпендикулярна к плоскости , то в системе плоскостей и плоскость будет фронтально – проецирующей и её горизонтальный след перпендикулярен к новой оси проекций. С учётом изложенного проведём  и отметим новую точку схода следов
и отметим новую точку схода следов  . Второй точкой следа
. Второй точкой следа  будет новая фронтальная проекция любой точки, лежащей в плоскости
будет новая фронтальная проекция любой точки, лежащей в плоскости  Возьмём точку
Возьмём точку  на горизонтали NA плоскости
на горизонтали NA плоскости  и построим новую её фронтальную проекцию
и построим новую её фронтальную проекцию 
 и
и  Проведя прямую из точки
Проведя прямую из точки  через точку
через точку  получим новый фронтальный след
получим новый фронтальный след 
Построение можно упростить, если взять точку на следе заданной плоскости. Например, для преобразования плоскости 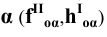 в проецирующую по отношению к плоскости
в проецирующую по отношению к плоскости  (см. Рис.6.19) проводим
(см. Рис.6.19) проводим  и строим новую фронтальную проекцию
и строим новую фронтальную проекцию  точки К, взятой на следе
точки К, взятой на следе 
 Прямая, проведённая из новой точки
Прямая, проведённая из новой точки  схода следов через точку
схода следов через точку  будет искомым новым фронтальным следом
будет искомым новым фронтальным следом 
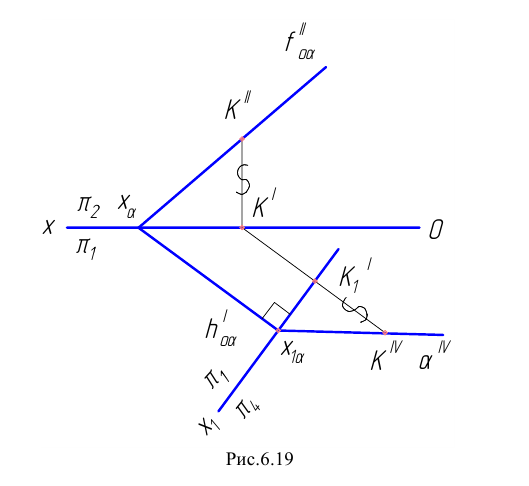
Пусть требуется определить истинную величину треугольника AВС, заданного проекциями  и
и  (см. Рис.6.20). Заменим плоскость
(см. Рис.6.20). Заменим плоскость  новой фронтальной плоскостью проекций
новой фронтальной плоскостью проекций  , перпендикулярной к плоскости треугольника. Для этого строим произвольную горизонталь треугольника.
, перпендикулярной к плоскости треугольника. Для этого строим произвольную горизонталь треугольника.
Горизонтальная проекция  горизонтали определяет направление горизонтального следа плоскости треугольника. Проведём
горизонтали определяет направление горизонтального следа плоскости треугольника. Проведём  и найдём новую фронтальную проекцию треугольника, построив новые фронтальные проекции его вершин.
и найдём новую фронтальную проекцию треугольника, построив новые фронтальные проекции его вершин.
Треугольник ABC спроецируется на плоскость  в виде прямой
в виде прямой  так как плоскость треугольника стала проецирующей.
так как плоскость треугольника стала проецирующей.
Произведём вторую перемену плоскости проекций, заменяя плоскость  новой плоскостью
новой плоскостью  , параллельной плоскости треугольника. Новой осью проекции
, параллельной плоскости треугольника. Новой осью проекции  будет прямая, параллельная проекции
будет прямая, параллельная проекции  треугольника.
треугольника.
Новые горизонтальные проекции  вершин найдём на перпендикулярах, опущенных из точек
вершин найдём на перпендикулярах, опущенных из точек 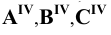 на ось
на ось  откладывая на них от оси
откладывая на них от оси  значения координат
значения координат  этих точек. Соединяя новые горизонтальные проекции точек прямыми линиями, получим истинную величину
этих точек. Соединяя новые горизонтальные проекции точек прямыми линиями, получим истинную величину  заданного треугольника.
заданного треугольника.
Отметим, что метод перемены плоскостей проекций обеспечивает получение чёткого чертежа, так как дополнительные построения не накладываются на основные проекции.
Основные метрические задачи
К метрическим задачам относят задачи на определение кратчайших расстояний между геометрическими элементами, определение истинных размеров углов между геометрическими элементами и определение истинных размеров геометрических элементов. Часть этих задач рассматривалась выше (определение истинной длины отрезка прямой линии, определение истинной величины плоской фигуры).
В этом разделе рассмотрим решение метрических задач с помощью метода вращения вокруг горизонтали (фронтали), а также метода перемены плоскостей проекций.
Рассмотрим следующие задачи:
- 1. Определить кратчайшее расстояние:
- 1.1. Между двумя точками
- 1.2. Между точкой и прямой
- 1.3. Между параллельными прямыми
- 1.4. Между скрещивающимися прямыми
- 1.5. От точки до плоскости
- 1.6. От прямой до параллельной ей плоскости
- 1.7. Между параллельными плоскостями
- 2. Определить истинную величину угла:
- 2.1. Между двумя пересекающимися прямыми
- 2.2. Между прямой и плоскостью
- 2.3. Между двумя плоскостями
1.1 Кратчайшее расстояние между двумя точками есть истинная длина отрезка, соединяющего эти точки (см. Рис.6.14)
1.2 Кратчайшим расстоянием отточки до прямой будет перпендикуляр, опущенный из этой точки на прямую (или её продолжение). Задача решается двумя переменами плоскостей проекций – прямую проецируют в точку (см. Рис.6.15), в ту же систему координат проецируют заданную точку и, соединяя две полученные точки, находят искомое расстояние (см. Рис.6.21) 
Чтобы найти положение точки  на проекции
на проекции  необходимо помнить, что если
необходимо помнить, что если  – истинная величина отрезка, то
– истинная величина отрезка, то  всегда параллельна оси
всегда параллельна оси 
Следует помнить, что  всегда больше (частный случай – равен) любой проекции
всегда больше (частный случай – равен) любой проекции 
1.3 Кратчайшее расстояние между параллельными прямыми – перпендикуляр, опущенный из любой точки одной прямой на другую (см. 1.2, Рис.6.21).
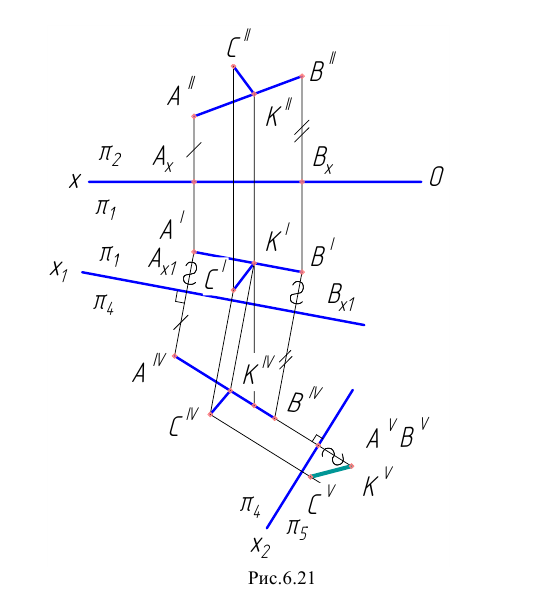
1.4 Чтобы найти кратчайшее расстояние между скрещивающимися прямыми, нужно двумя переменами плоскостей проекций одну из прямых спроецировать в точку, перенести в эту систему координат, вторую прямую и из полученной точки опустить перпендикуляр на проекцию прямой (см. Рис.6.22)
1.5 Кратчайшее расстояние от точки до плоскости – перпендикуляр, проведённый от этой точки к плоскости. Если плоскость проецирующая – это перпендикуляр от проекции точки к проецирующему следу плоскости (см. Рис.6.23, а). Если задана плоскость общего положения – одной переменой плоскостей проекций преобразуем её в проецирующую (см. Рис.6.18) и решаем задачу, как указано выше (см. Рис.6.23, б).
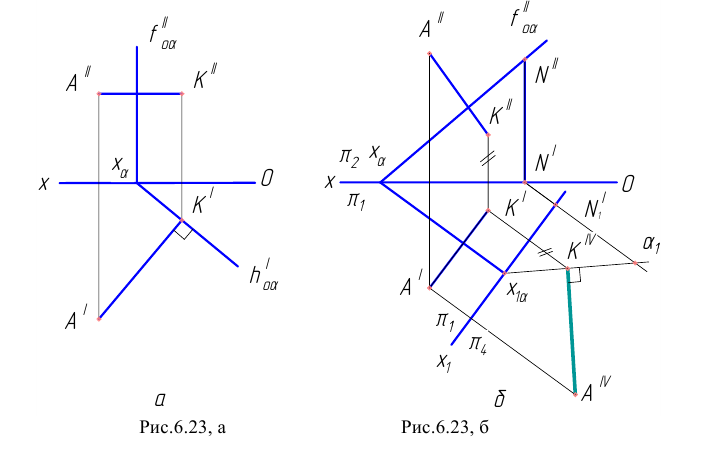
Если плоскость задана плоской фигурой – одной переменой плоскостей проекций преобразуем её в проецирующую (см. Рис.6.20) и опускаем на эту линию перпендикуляр из проекции заданной точки.
1.6 Так как прямая параллельна плоскости, то все её точки равноудалены от плоскости. Поэтому находим кратчайшее расстояние от любой точки этой прямой до плоскости (см. 1.5, Рис.6.23).
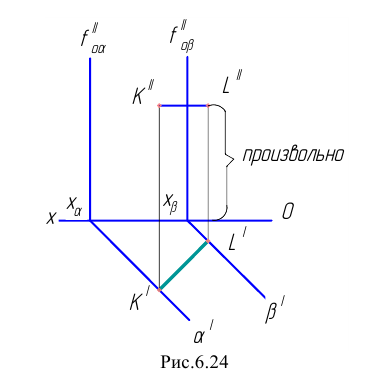
1.7 У параллельных плоскостей соответствующие следы параллельны. Если даны две проецирующие плоскости, то кратчайшее расстояние между ними – это перпендикуляр, проведённый в любом месте к проецирующим следам этих плоскостей (см. Рис.6.24). Если заданы параллельные плоскости общего положения – преобразуем их в проецирующие.
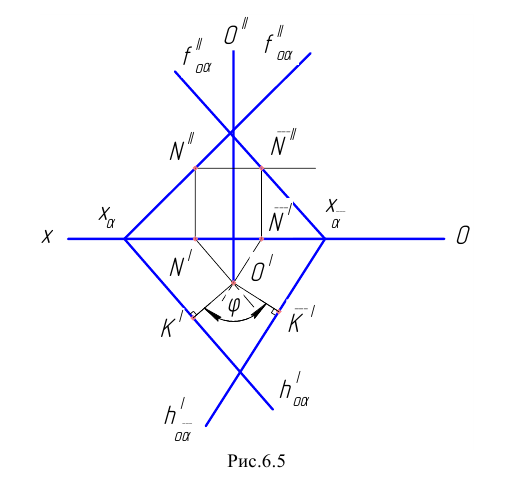
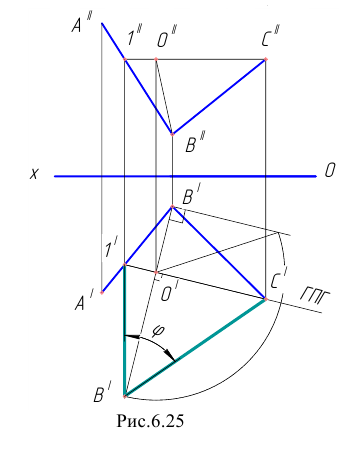
2.1 Для нахождения истинной величины угла между пересекающимися прямыми АВ и ВС применим метод вращения вокруг горизонтали (см. Рис.6.25). Проводим  – ФПГ находим
– ФПГ находим  ГПГ. При вращении
ГПГ. При вращении  вокруг горизонтали
вокруг горизонтали  точки 1 и С – неподвижны. Точкам В перемещается в пространстве по окружности, горизонтальная проекция которой – прямая
точки 1 и С – неподвижны. Точкам В перемещается в пространстве по окружности, горизонтальная проекция которой – прямая  (ГПГ). Откладывая от оси вращения
(ГПГ). Откладывая от оси вращения  истинную величину радиуса вращения
истинную величину радиуса вращения  (см. Рис.6. 9), получим истинную величину
(см. Рис.6. 9), получим истинную величину  т. е. истинную величину угла
т. е. истинную величину угла  между прямыми АВ и ВС.
между прямыми АВ и ВС.
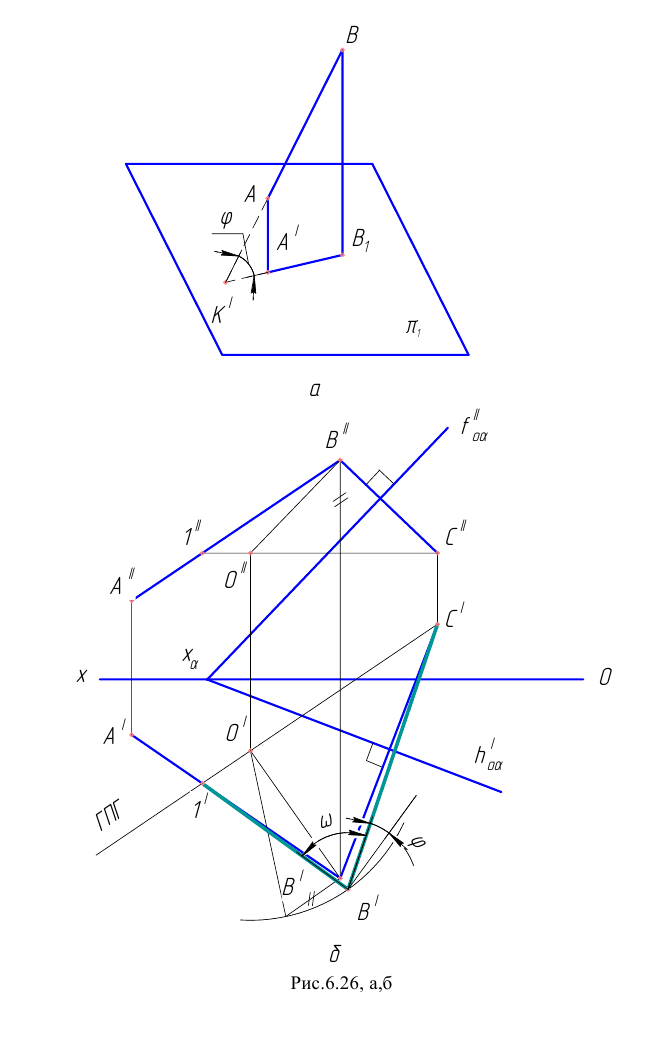
2.2 Прямая, не параллельная плоскости, составляет с ней некоторый угол . Для нахождения этого угла воспользуемся следующим рассуждением. Рассматривая прямоугольный треугольник  (Рис.6.26, а), нетрудно убедиться, что угол между прямой АВ и плоскостью
(Рис.6.26, а), нетрудно убедиться, что угол между прямой АВ и плоскостью  Если нужно найти угол между плоскостью
Если нужно найти угол между плоскостью  и прямой
и прямой 
 , то мы сначала найдём угол
, то мы сначала найдём угол  – между прямой АВ и перпендикуляром к плоскости
– между прямой АВ и перпендикуляром к плоскости  опущенным из произвольной точки прямой АВ.
опущенным из произвольной точки прямой АВ.
Пусть задана плоскость  и прямая
и прямая  Из точки В опустим перпендикуляр к плоскости
Из точки В опустим перпендикуляр к плоскости  Точка
Точка  выбрана произвольно. Вращением вокруг горизонтали
выбрана произвольно. Вращением вокруг горизонтали 
 находим истинную величину дополнительного угла
находим истинную величину дополнительного угла  (см. Рис.6.25). Находим
(см. Рис.6.25). Находим  (см. Рис.6.26, б).
(см. Рис.6.26, б).
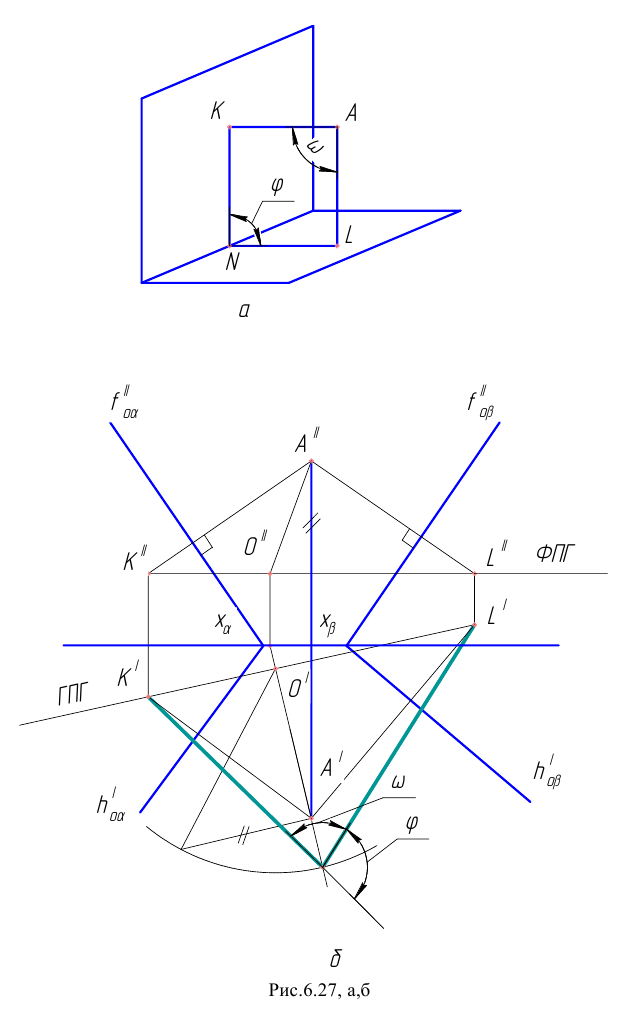
2.3 Две пересекающиеся плоскости образуют в пространстве четыре угла, два из них (противоположные) – острые, два – тупые ( частный случай – все углы прямые). Углом между плоскостями в начертательной геометрии принято считать острый угол.
Если из произвольной точки А в пространстве (Рис.6.27, а) опустить на пересекающиеся плоскости  и
и  перпендикуляры АК и AL, то угол между плоскостями будет равен
перпендикуляры АК и AL, то угол между плоскостями будет равен 
Воспользуемся этим рассуждением для нахождения угла между плоскостями  и (Рис.6.27, б). Из произвольной точки
и (Рис.6.27, б). Из произвольной точки  опускаем перпендикуляры к плоскостям и
опускаем перпендикуляры к плоскостям и  (точки К и L взяты произвольно). Проведя
(точки К и L взяты произвольно). Проведя  и
и  (ГПГ) находим истинную величину дополнительного угла
(ГПГ) находим истинную величину дополнительного угла  (см. Рис.6.25). Находим
(см. Рис.6.25). Находим  (см. Рис.6.27, б). Если найденный дополнительный угол
(см. Рис.6.27, б). Если найденный дополнительный угол  – острый, то он и будет углом между пересекающимися плоскостями.
– острый, то он и будет углом между пересекающимися плоскостями.
Методы преобразования проекций
Метод замены плоскостей проекций
Суть метода заключается в замене одной плоскости проекции на другую. При этом сам объект четко зафиксирован в пространстве. При такой замене величина координаты любой точки на вводимой плоскости будет такой же, как координаты той же точки на заменяемой плоскости.
Индексы при обозначении плоскости меняются с заменой самой плоскости проекций (четный индекс – на ближайшую четную цифру, нечетный индекс – на ближайшую нечетную).
На комплексном чертеже преобразование выглядит следующим образом: например, если заменить фронтальную плоскость проекций  на новую плоскость
на новую плоскость  (рис. 9.1, а), то последняя должна быть перпендикулярна к плоскости
(рис. 9.1, а), то последняя должна быть перпендикулярна к плоскости  а расстояние от проекции точки
а расстояние от проекции точки  до оси
до оси  будет равно расстоянию от проекции точки
будет равно расстоянию от проекции точки  до оси
до оси  . Новая ось проекции
. Новая ось проекции  проводится так, как этого требует решение задачи. В рассматриваемом случае она проведена произвольно.
проводится так, как этого требует решение задачи. В рассматриваемом случае она проведена произвольно.
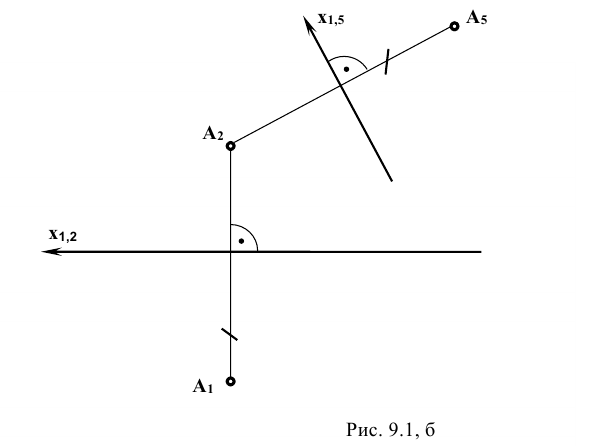
При замене горизонтальной плоскости на новую плоскость  (рис. 9.1, б) сохраняется неизменная координата Δу.
(рис. 9.1, б) сохраняется неизменная координата Δу.
При решении конкретной задачи таких замен может быть выполнено последовательно несколько (как правило, не более двух).
Главные условия этих действий — сохранение ортогонального проецирования в новой системе плоскостей проекций и величин соответствующих координат. Линии проекционной связи всегда должны быть перпендикулярны к оси координат, как в первоначальной, так и в новой системе плоскостей проекций.
Задание: Дана прямая общего положения АВ (рис. 9.2). Необходимо преобразовать чертеж таким образом, чтобы прямая стала проецирующей, т.е спроецировалась на одну из плоскостей проекции в точку.
Решение: Преобразование выполняется в два этапа. 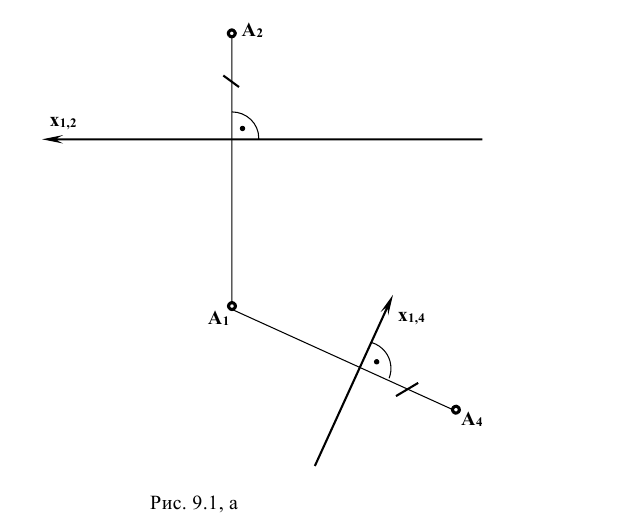
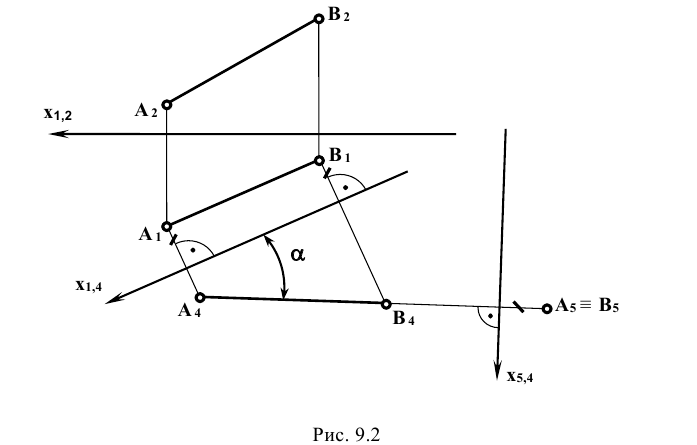
На первом этапе новую плоскость, например (), вводят взамен фронтальной плоскости , параллельно прямой АВ. Новую ось проекций проводят параллельно горизонтальной проекции прямой ( ). Далее проводят от горизонтальной проекции линии связи, перпендикулярные к новой оси проекций, и на них откладывают координаты z, т.е. расстояние от оси проекций до фронтальных проекций точек. Новая проекция
). Далее проводят от горизонтальной проекции линии связи, перпендикулярные к новой оси проекций, и на них откладывают координаты z, т.е. расстояние от оси проекций до фронтальных проекций точек. Новая проекция  будет определять натуральную длину отрезка АВ. Одновременно определяется угол наклона прямой к плоскости проекций, в рассматриваемом примере к горизонтальной плоскости
будет определять натуральную длину отрезка АВ. Одновременно определяется угол наклона прямой к плоскости проекций, в рассматриваемом примере к горизонтальной плоскости  – угол α.
– угол α.
Аналогично определяется угол наклона прямой АВ к плоскости и обозначается угол – β.
На втором этапе в системе плоскостей  / плоскость проекций
/ плоскость проекций  заменяют на
заменяют на  . При этом ось
. При этом ось  проводят перпендикулярно к проекции
проводят перпендикулярно к проекции  . В новой системе плоскостей проекций /
. В новой системе плоскостей проекций / прямая заняла проецирующее положение, т.е. она стала перпендикулярна к плоскости
прямая заняла проецирующее положение, т.е. она стала перпендикулярна к плоскости  , и на нее прямая спроецировалась в точку, а проекции концов отрезка АВ совпали (
, и на нее прямая спроецировалась в точку, а проекции концов отрезка АВ совпали ( ).
).
Способ применяется для определения расстояния между параллельными и скрещивающимися прямыми, величины двугранного угла, натуральной величины плоской фигуры.
В том случае, если прямые являются прямыми уровня, т.е. прямые параллельны одной из плоскостей проекций, первый этап решения опускается и преобразование начинается со второго этапа.
Метод вращение вокруг проецирующей оси
Этот метод заключается в том, что любая точка вращается вокруг какой-либо оси, перпендикулярной к одной из плоскостей проекции. При этом точка в пространстве движется по траектории – окружности, которая лежит в плоскости, перпендикулярной к оси вращения. Система плоскостей проекций остается неизменной.
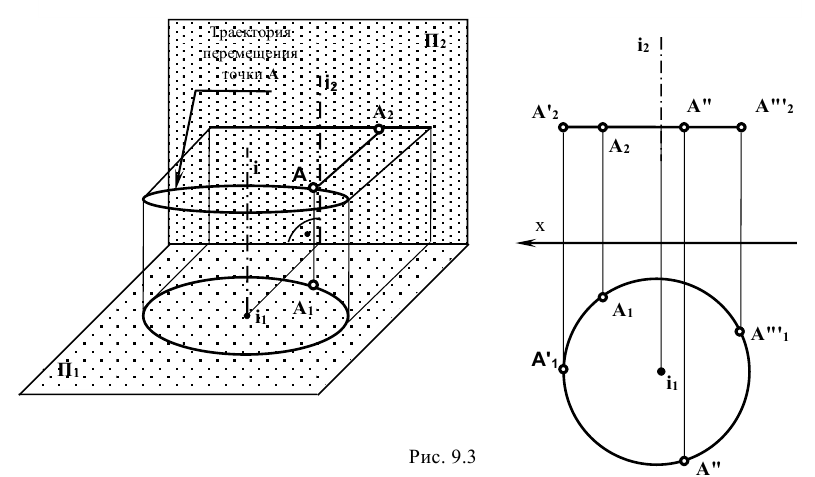
Например, при вращении точки А вокруг оси i (рис. 9.3), перпендикулярной к , она движется по траектории, которая проецируется на плоскость в виде окружности (точки 
 и т.д.), а на плоскость – в виде горизонтальной линии. Все фронтальные проекции точки А (
и т.д.), а на плоскость – в виде горизонтальной линии. Все фронтальные проекции точки А ( и т.д.) находятся на фронтальном следе горизонтальной плоскости. Точка
и т.д.) находятся на фронтальном следе горизонтальной плоскости. Точка  горизонтальная проекция оси i, а прямая
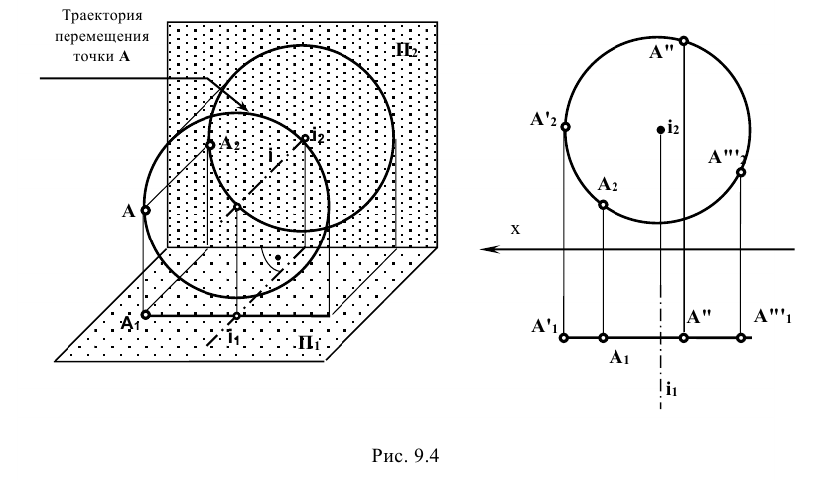
горизонтальная проекция оси i, а прямая  — ее фронтальная проекция. Если вращать точку А вокруг оси i, перпендикулярной к фронтальной плоскости проекций (рис. 9.4), то фронтальные проекции и т.д. точки А будут лежать на окружности,
— ее фронтальная проекция. Если вращать точку А вокруг оси i, перпендикулярной к фронтальной плоскости проекций (рис. 9.4), то фронтальные проекции и т.д. точки А будут лежать на окружности,
Траектория перемещения точки А плоскость которой перпендикулярна к оси i и горизонтальной плоскости проекции. При этом горизонтальные проекции и т.д. точки А будут расположены на прямой линии параллельной оси х и проходящей через горизонтальную проекцию точки 
Метод плоскопараллельного перемещения
Применение метода вращения вокруг проецирующей оси при преобразовании нередко приводит к наложению на исходную новых проекций. При этом чтение чертежа представляет определенные сложности. Избавиться от указанного недостатка позволяет метод плоскопараллельного перемещения.
Суть метода заключается в том, что все точки фигуры перемещаются в пространстве параллельно некоторой плоскости проекций. Это означает, что каждая точка объекта перемещается в плоскости уровня.
Например, прямая общего положения АВ, заданная своими проекциями  (рис. 9.5), перемещается таким образом, чтобы горизонтальная проекция
(рис. 9.5), перемещается таким образом, чтобы горизонтальная проекция  стала параллельной оси х.
стала параллельной оси х. 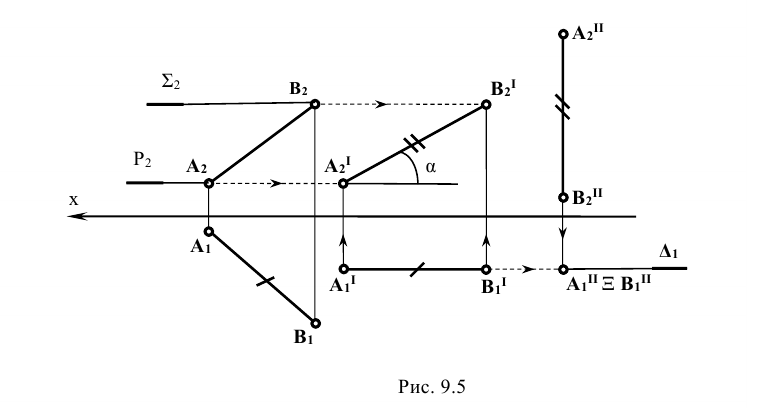
Траектория перемещения точки А
При этом фронтальная проекция прямой  перемещаются параллельно оси х (фронтальные проекции концов отрезка займут новое положение
перемещаются параллельно оси х (фронтальные проекции концов отрезка займут новое положение  ) . При перемещении длина горизонтальной проекции отрезка АВ остается постоянной, а величина фронтальной проекции
) . При перемещении длина горизонтальной проекции отрезка АВ остается постоянной, а величина фронтальной проекции  станет равной натуральной величиной отрезка. При этом угол α – угол наклона прямой АВ к горизонтальной плоскости проекции
станет равной натуральной величиной отрезка. При этом угол α – угол наклона прямой АВ к горизонтальной плоскости проекции  .
.
При перемещении прямой АВ во фронтальной плоскости уровня можно достичь положения прямой, перпендикулярного плоскости
можно достичь положения прямой, перпендикулярного плоскости  . Этот метод применяется для определения натуральной величины отрезка, его угла наклона к плоскостям проекций, расстояния между параллельными прямыми и натуральной величины плоской фигуры.
. Этот метод применяется для определения натуральной величины отрезка, его угла наклона к плоскостям проекций, расстояния между параллельными прямыми и натуральной величины плоской фигуры.
Метод вращения вокруг линии уровня (частный случай метода вращения)
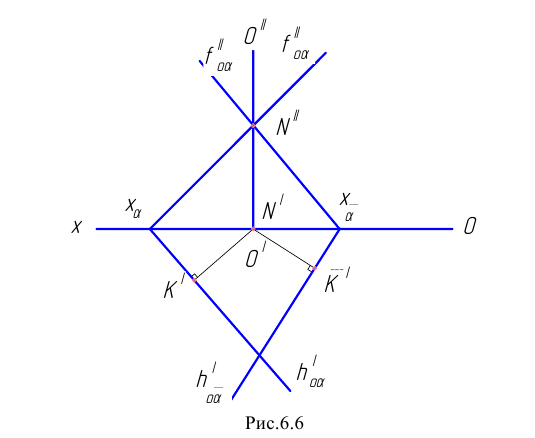
Суть метода заключается в том, что осью вращения выбирается одна из линий уровня – горизонталь или фронталь. Таким образом, плоскость как бы поворачивается вокруг некоторой оси, принадлежащей этой плоскости, до положения, параллельного одной из плоскостей проекций. Например, повернем плоский угол, образованный пересекающимися прямыми а и b (рис. 9.6).
Для решения поставленной задачи проводят в плоскости угла линию уровня (в данном случае горизонталь h) и используют ее как ось вращения, вокруг которой будут вращаться прямые а и b и вершина К. Все точки вращаются в плоскостях, перпендикулярных к горизонтали, при этом положение точек 1 и 2 остается неизменным, а точка К вращается вокруг горизонтали. Из горизонтальной проекции  точки К проводят линию, перпендикулярную к оси вращения
точки К проводят линию, перпендикулярную к оси вращения  .
.
Отрезок  – горизонтальная проекция радиуса вращения точки К. Находят натуральную величину этого радиуса (например способом прямоугольного треугольника).
– горизонтальная проекция радиуса вращения точки К. Находят натуральную величину этого радиуса (например способом прямоугольного треугольника).
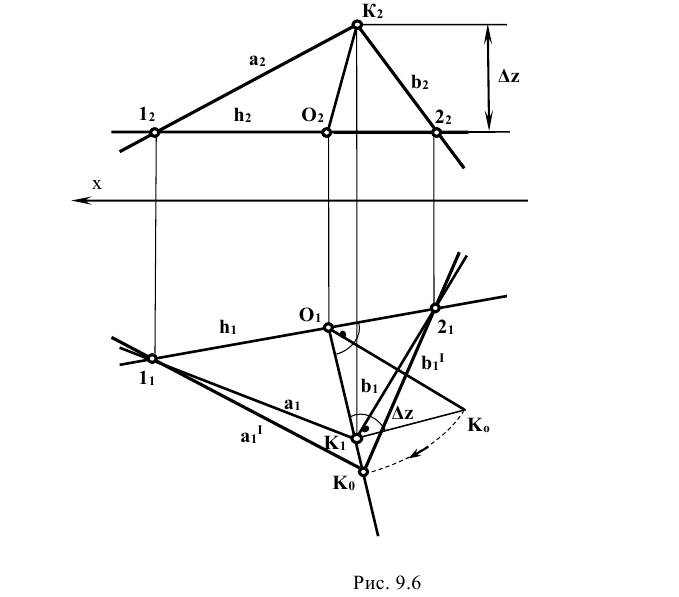
На продолжении проекции прямой  откладывают натуральную величину радиуса
откладывают натуральную величину радиуса  и получают положение т. К после поворота (
и получают положение т. К после поворота ( ). Соединив точки
). Соединив точки 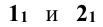 с точкой
с точкой  , получают натуральную величину угла при вершине К. Этим методом находится натуральная величина любой плоской фигуры, занимающей общее положение в пространстве.
, получают натуральную величину угла при вершине К. Этим методом находится натуральная величина любой плоской фигуры, занимающей общее положение в пространстве.
Метод совмещения плоскостей
Этот метод является частным случаем способа вращения вокруг линии уровня. В качестве оси вращения выбирается какой-либо след плоскости в которой лежит та или иная фигура. При этом каждая точка, принадлежащая рассматриваемой фигуре, при вращении перемещается в плоскости, перпендикулярной к следу той плоскости, в которой она лежит. Например, плоскость P, заданную своими следами и
и  , необходимо совместить с горизонтальной плоскостью проекций
, необходимо совместить с горизонтальной плоскостью проекций  (рис. 9.7).
(рис. 9.7).
Для решения поставленной задачи берут на фронтальном следе  плоскости P произвольную проекцию точки A и находят ее горизонтальную проекцию
плоскости P произвольную проекцию точки A и находят ее горизонтальную проекцию  , которая лежит на оси х. Из проекции
, которая лежит на оси х. Из проекции  точки А проводят луч, перпендикулярный к горизонтальному следу плоскости
точки А проводят луч, перпендикулярный к горизонтальному следу плоскости  (любая точка при вращении должна перемещаться в плоскости, перпендикулярной к оси поворота). На нем находят совмещенное положение точки A — точку
(любая точка при вращении должна перемещаться в плоскости, перпендикулярной к оси поворота). На нем находят совмещенное положение точки A — точку  , как точку пересечения луча с дугой окружности радиусом
, как точку пересечения луча с дугой окружности радиусом  (R вращения – радиус поворота проекции точки А). Точка
(R вращения – радиус поворота проекции точки А). Точка  принадлежит одновременно и плоскости
принадлежит одновременно и плоскости  и новому (совмещенному) положению плоскости P. Через точку
и новому (совмещенному) положению плоскости P. Через точку  проводят новый фронтальный след
проводят новый фронтальный след  плоскости P. Следы
плоскости P. Следы  и
и  характеризуют новое (совмещенное) положение плоскости P.
характеризуют новое (совмещенное) положение плоскости P.
Примеры решения задач
Ниже приведены решения одной и той же задачи вышеописанными методами.
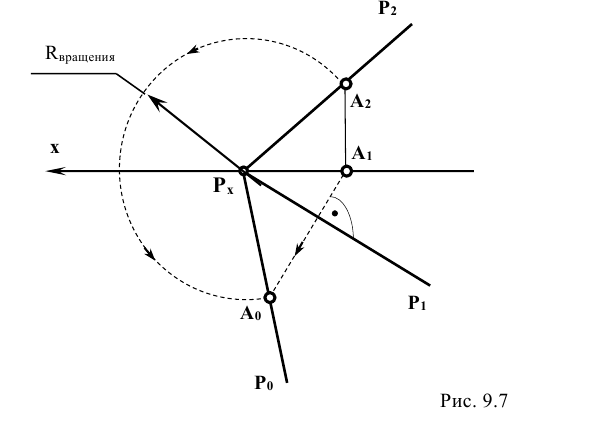
Задание: определить натуральную величину треугольника ABC (рис. 9.8), а также угол наклона плоскости треугольника к плоскости  .
.
Решение методом замены плоскостей проекций (рис. 9.9).
Плоскость треугольника спроецируется в натуральную величину в том случае, если она будет параллельна одной из плоскостей проекций. Одним преобразованием задачу решить невозможно. Она решается в два этапа: при первой замене плоскостей проекций получают плоскость треугольника ABC, перпендикулярную к новой плоскости проекций, при второй замене – получают плоскость треугольника, параллельную новой плоскости проекций.
Первый этап. Одним из условий перпендикулярности двух плоскостей является наличие прямой, принадлежащей одной из плоскостей, перпендикулярной к другой плоскости. Используя этот признак, проводят через точку А в плоскости треугольника горизонталь (h). Затем на произвольном расстоянии от горизонтальной проекции треугольника  проводят ось
проводят ось новой системы плоскостей проекций
новой системы плоскостей проекций  перпендикулярно к горизонтальной проекции горизонтали
перпендикулярно к горизонтальной проекции горизонтали . В новой системе треугольник ABC стал перпендикулярен к новой плоскости проекций
. В новой системе треугольник ABC стал перпендикулярен к новой плоскости проекций  .
.
На линиях проекционной связи в новой системе откладывают координаты z точек А, В, С с фронтальной проекции исходной системы плоскостей  .
. 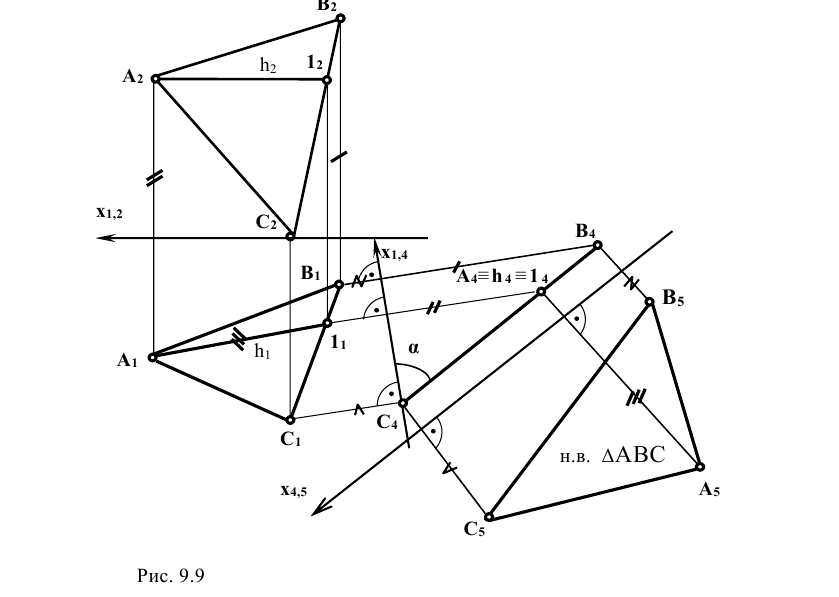
При соединении новых проекций  получают прямую линию, в которую спроецировался треугольник ABC. На этом этапе определяется угол наклона плоскости треугольника к горизонтальной плоскости проекции – угол α . На чертеже это угол между осью и проекцией
получают прямую линию, в которую спроецировался треугольник ABC. На этом этапе определяется угол наклона плоскости треугольника к горизонтальной плоскости проекции – угол α . На чертеже это угол между осью и проекцией 
Второй этап. Выбираем новую плоскость проекции  , параллельную плоскости треугольника, т.е. новую ось
, параллельную плоскости треугольника, т.е. новую ось  проводят параллельно
проводят параллельно  на произвольном расстоянии. Получают новую систему
на произвольном расстоянии. Получают новую систему  . Полученный треугольник
. Полученный треугольник  и есть искомая натуральная величина треугольника ABC.
и есть искомая натуральная величина треугольника ABC.
2) Решение методом вращения вокруг проецирующей оси (рис. 9.10).
Задача решается в два этапа. На первом этапе выполняют вращение так, чтобы плоскость треугольника ABC преобразовалась в проецирующую плоскость, т.е. стала перпендикулярна к одной из плоскостей проекций. Для этого проводят горизонталь h ( ) через точку А. (построение начинают с фронтальной проекции
) через точку А. (построение начинают с фронтальной проекции  , она проходит через проекцию точки
, она проходит через проекцию точки  и проекцию точки
и проекцию точки  при этом
при этом  параллельна оси х). Далее находят горизонтальную проекцию
параллельна оси х). Далее находят горизонтальную проекцию  горизонтали h (через проекции
горизонтали h (через проекции  и
и  ). Через точку А проводят ось i – ось вращения треугольника так, чтобы она была перпендикулярна к
). Через точку А проводят ось i – ось вращения треугольника так, чтобы она была перпендикулярна к  . На фронтальной проекции через вершины
. На фронтальной проекции через вершины  и
и  проводят следы горизонтальных плоскостей уровня Δ и Σ в которых при вращении будут перемещаться точки А и В.
проводят следы горизонтальных плоскостей уровня Δ и Σ в которых при вращении будут перемещаться точки А и В.
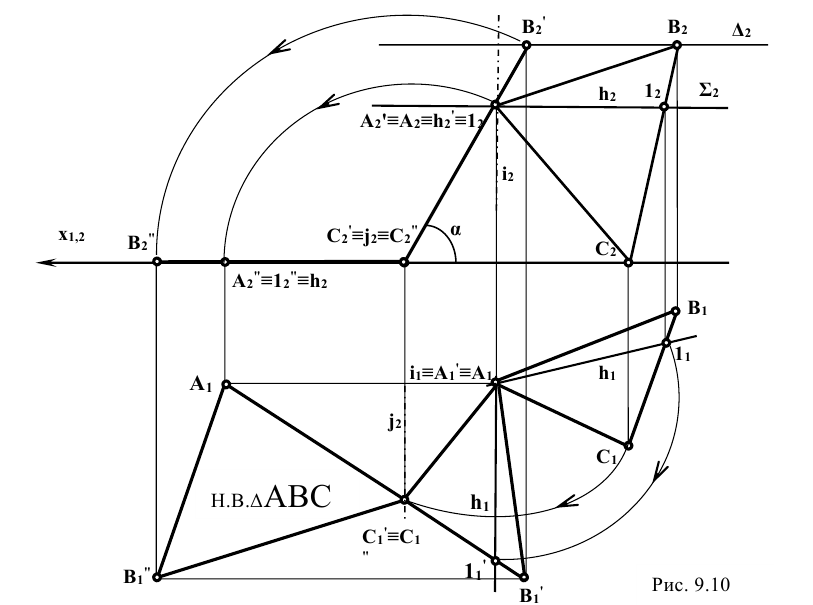
Вершина С принадлежит плоскости  поэтому ее плоскостью вращения будет плоскость проекций
поэтому ее плоскостью вращения будет плоскость проекций  . На горизонтальной проекции, взяв за центр вращения проекцию
. На горизонтальной проекции, взяв за центр вращения проекцию  поворачивают горизонталь А так, чтобы на плоскость
поворачивают горизонталь А так, чтобы на плоскость  она спроецировалась в точку. На чертеже это выразится тем, что
она спроецировалась в точку. На чертеже это выразится тем, что  займет новое положение – перпендикулярно к оси х.
займет новое положение – перпендикулярно к оси х.
При этом на фронтальной проекции остается неизменной, находясь на следе плоскости  и ее обозначим
и ее обозначим  .
.
На горизонтальной проекции поворачиваем оставшиеся вершины В и С вокруг оси i так, чтобы На фронтальной проекции вершина В перемещается по следу плоскости
На фронтальной проекции вершина В перемещается по следу плоскости  , а вершина С – по оси х. Соединив новые положения проекций всех вершин треугольника ABC, получают проекцию
, а вершина С – по оси х. Соединив новые положения проекций всех вершин треугольника ABC, получают проекцию  , сливающуюся в линию. Плоскость треугольника ABC заняла проецирующее положение. На данном этапе, при необходимости, находят угол наклона плоскости треугольника ABC к – угол α .
, сливающуюся в линию. Плоскость треугольника ABC заняла проецирующее положение. На данном этапе, при необходимости, находят угол наклона плоскости треугольника ABC к – угол α .
На втором этапе проводят ось j через вершину С так, чтобы ось была фронтально проецирующая. При этом  , а горизонтальная проекция
, а горизонтальная проекция  пройдет через проекцию
пройдет через проекцию  . Вокруг оси поворачивают треугольник так, чтобы он стал параллелен горизонтальной плоскости проекций. В данной задаче вращают точки
. Вокруг оси поворачивают треугольник так, чтобы он стал параллелен горизонтальной плоскости проекций. В данной задаче вращают точки  , вокруг
, вокруг  до совмещения с осью х, при этом проекции
до совмещения с осью х, при этом проекции  будут перемещаться параллельно оси х и займут новое положение
будут перемещаться параллельно оси х и займут новое положение  , и
, и  вершина С останется на месте. Соединив точки между собой, получают новое положение плоскости (оно соответствует натуральной величине треугольника ABC).
вершина С останется на месте. Соединив точки между собой, получают новое положение плоскости (оно соответствует натуральной величине треугольника ABC).
- Заказать чертежи
3) Решение методом плоскопараллельного перемещения (рис. 9.11).
Задача решается в два этапа. На первом этапе преобразуют чертеж так, чтобы плоскость треугольника ABC стала перпендикулярна к одной из плоскостей проекций. Для этого проводят в плоскости треугольника горизонталь h (фронтальная проекция  ,). Каждую вершину треугольника заключают в свою плоскость уровня, параллельную плоскости . В рассматриваемом примере вершина С принадлежит плоскости проекций , А принадлежит плоскости Σ, В — плоскости Δ.
,). Каждую вершину треугольника заключают в свою плоскость уровня, параллельную плоскости . В рассматриваемом примере вершина С принадлежит плоскости проекций , А принадлежит плоскости Σ, В — плоскости Δ.
Плоскость треугольника перемещается в пространстве до тех пор, пока горизонталь треугольника не станет перпендикулярна к фронтальной плоскости проекций .
Для этого на свободном поле чертежа вычерчивают горизонтальную проекцию треугольника  с условием, чтобы
с условием, чтобы  , а значит
, а значит  . При этом вершины треугольника, перемещаясь каждая в своей плоскости, займут новое положение – (фронтальная проекция
. При этом вершины треугольника, перемещаясь каждая в своей плоскости, займут новое положение – (фронтальная проекция  заменится
заменится  ). Соединив эти точки, получают новое положение треугольника ABC, спроецированного в линию, т.е. перпендикулярного к плоскости .
). Соединив эти точки, получают новое положение треугольника ABC, спроецированного в линию, т.е. перпендикулярного к плоскости .
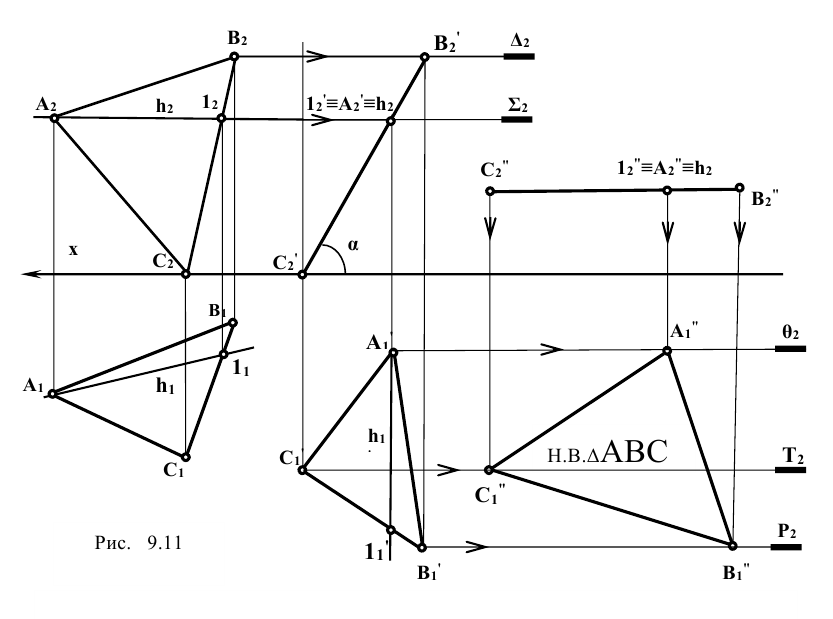
На втором этапе, чтобы получить натуральную величину треугольника ABC, его плоскость поворачивают до тех пор, пока она не будет параллельна одной из плоскостей проекций. В рассматриваемом решении фронтальную проекцию треугольник располагают на произвольном расстоянии от оси х параллельно плоскости . При этом вершины А, В и С треугольника заключают в горизонтально проецирующие плоскости θ, Т, Р. По следам этих плоскостей будут перемещаться горизонтальные проекции вершин  .
.
От нового положения фронтальной проекции  проводят линии проекционной связи до пресечения с соответствующими следами плоскостей, в которых они перемещаются (
проводят линии проекционной связи до пресечения с соответствующими следами плоскостей, в которых они перемещаются ( ), и получая проекции точек
), и получая проекции точек  .
.
Соединив эти проекции, получают треугольник ABC в натуральную величину.
4) Решение методом вращения вокруг линии уровня (рис.9.12)
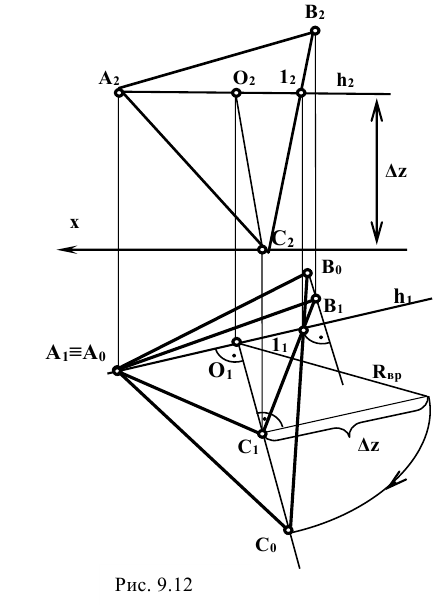
Для решения задачи этим способом необходимо повернуть плоскость треугольника вокруг линии уровня, в данном случае вокруг горизонтали, до положения, параллельного горизонтальной плоскости проекции. Через точку А в плоскости треугольника ABC проводят горизонталь h, фронтальная проекция которой будет параллельна оси х. Отмечают точку  и находят ее горизонтальную проекцию
и находят ее горизонтальную проекцию  . Прямая
. Прямая  является горизонтальной проекцией
является горизонтальной проекцией  горизонтали h. Вокруг горизонтали будут вращаться точки В и С.
горизонтали h. Вокруг горизонтали будут вращаться точки В и С.
Определяют натуральную величину радиуса вращения точки С. Для определения натуральной величины радиуса вращения используют любой метод (в данном случае способ прямоугольного треугольника) строят прямоугольный треугольник, в котором  – один из катетов. Второй катет – разность координат Δz отрезка
– один из катетов. Второй катет – разность координат Δz отрезка  , взятого с фронтальной проекции. В построенном треугольнике гипотенуза
, взятого с фронтальной проекции. В построенном треугольнике гипотенуза  – натуральная величина радиуса вращения.
– натуральная величина радиуса вращения.
На продолжении перпендикуляра откладывают  и получают новое положение вершины С после вращения —
и получают новое положение вершины С после вращения — . Проекция вершины
. Проекция вершины  получается пересечением луча
получается пересечением луча  и перпендикуляра к горизонтальной проекции
и перпендикуляра к горизонтальной проекции  проведенного через проекцию точки
проведенного через проекцию точки  .
.
Треугольник  есть искомая натуральная величина треугольника ABC.
есть искомая натуральная величина треугольника ABC.
5) Решение методом совмещения (рис. 9.13).
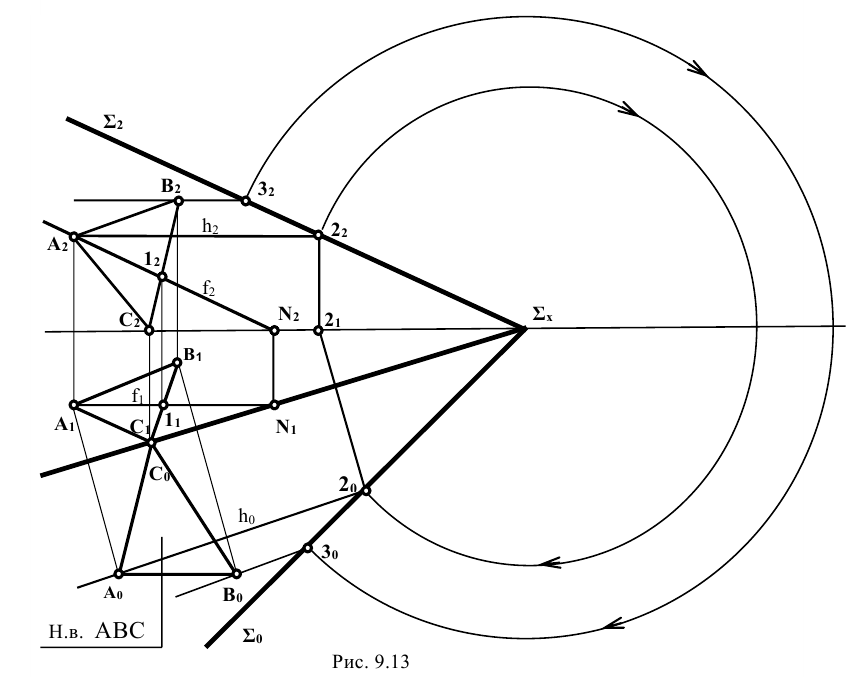
Для решения задачи методом совмещения необходимо построить следы плоскости Σ, которой принадлежит треугольник ABC. Для этого проводят в плоскости треугольника ABC фронталь f и находят горизонтальный след этой фронтали –  . По условию задачи вершина С треугольника принадлежит горизонтальной плоскости проекций
. По условию задачи вершина С треугольника принадлежит горизонтальной плоскости проекций  . Тогда горизонтальный след
. Тогда горизонтальный след  плоскости Σ проводят через проекции
плоскости Σ проводят через проекции  и
и  . Соединив эти две точки и продлив отрезок до пересечения с осью х, находят точку схода следов Σх . Учитывая, что все фронтали плоскости параллельны ее фронтальному следу, АВС фронтальный след
. Соединив эти две точки и продлив отрезок до пересечения с осью х, находят точку схода следов Σх . Учитывая, что все фронтали плоскости параллельны ее фронтальному следу, АВС фронтальный след  плоскости Σ проводят через точку Σх параллельно проекции фронтали
плоскости Σ проводят через точку Σх параллельно проекции фронтали  .
.
Для нахождения натуральной величины треугольника ABC необходимо построить совмещенное положение плоскости Σ с горизонтальной плоскостью проекций  . Для этого через вершину А проводят горизонталь . На фронтальном следе
. Для этого через вершину А проводят горизонталь . На фронтальном следе  фиксируют точку
фиксируют точку  . Ее горизонтальная проекция -точка
. Ее горизонтальная проекция -точка  . Точка 2 вращается в плоскости, перпендикулярной к горизонтальному следу плоскости Σ.
. Точка 2 вращается в плоскости, перпендикулярной к горизонтальному следу плоскости Σ.
Поэтому, чтобы построить точку 2 в совмещенном положении  , проводят из перпендикуляр к горизонтальному следу Σ, а из центра Σх дугу окружности радиусом Σх до пересечения с направлением перпендикуляра. Соединив Σх с
, проводят из перпендикуляр к горизонтальному следу Σ, а из центра Σх дугу окружности радиусом Σх до пересечения с направлением перпендикуляра. Соединив Σх с  , получают совмещенное положение фронтального следа
, получают совмещенное положение фронтального следа  – Далее через точку
– Далее через точку  проводят горизонталь
проводят горизонталь  в совмещенном положении. На этой горизонтали находят точку
в совмещенном положении. На этой горизонтали находят точку  , проведя перпендикуляр из точки
, проведя перпендикуляр из точки  к горизонтальному следу
к горизонтальному следу  .
.
По такой же схеме строят совмещенное положение точки .Совмещенное положение точки С совпадает с ее горизонтальной проекцией  т.е.
т.е.  ≡. Соединив построенные точки, получают треугольник
≡. Соединив построенные точки, получают треугольник  – это и есть натуральная величина треугольника ABC.
– это и есть натуральная величина треугольника ABC.
Способ вращения
Способ вращения базируется на нескольких основных положениях. При вращении вокруг некоторой неподвижной прямой (оси вращения):
- каждая точка вращаемой фигуры перемещается в плоскости, перпендикулярной оси вращения;
- каждая точка вращаемой фигуры перемещается по окружности, центр которой (центр вращения) находится в точке пересечения оси с плоскостью вращения;
- радиус вращения равен кратчайшему расстоянию от вращаемой точки до оси вращения;
- точки, расположенные на оси вращения, своего положения в пространстве не изменяют.
Ось вращения может быть задана или выбрана. В последнем случае выгодно использовать в качестве оси вращения прямые частного положения, перпендикулярные или параллельные плоскостям проекций.
Проекции, полученные после преобразования, условимся обозначать чертой над обозначением геометрического объекта, например: горизонтальная проекция  точки после первого преобразования
точки после первого преобразования  , после второго преобразования –
, после второго преобразования –  горизонтальный след плоскости
горизонтальный след плоскости  после первого преобразования
после первого преобразования  , после второго преобразования –
, после второго преобразования –  и т.д.
и т.д.
Вращение вокруг оси, перпендикулярной плоскости проекций
Повернем точку  вокруг оси
вокруг оси  , перпендикулярной плоскости
, перпендикулярной плоскости  , на некоторый угол
, на некоторый угол  (рис.75). Траектория перемещения точки в этом случае – окружность, лежащая в плоскости
(рис.75). Траектория перемещения точки в этом случае – окружность, лежащая в плоскости  . Плоскость перпендикулярна оси
. Плоскость перпендикулярна оси  и, значит, параллельна плоскости
и, значит, параллельна плоскости  . Траектория вращения точки на плоскость
. Траектория вращения точки на плоскость  проецируется без искажения.
проецируется без искажения.
Горизонтальная проекция этой траектории лежит на горизонтальном следе плоскости вращения  , параллельной оси
, параллельной оси  . Точка
. Точка  является центром вращения точки , а отрезок
является центром вращения точки , а отрезок  – радиусом вращения точки .
– радиусом вращения точки .
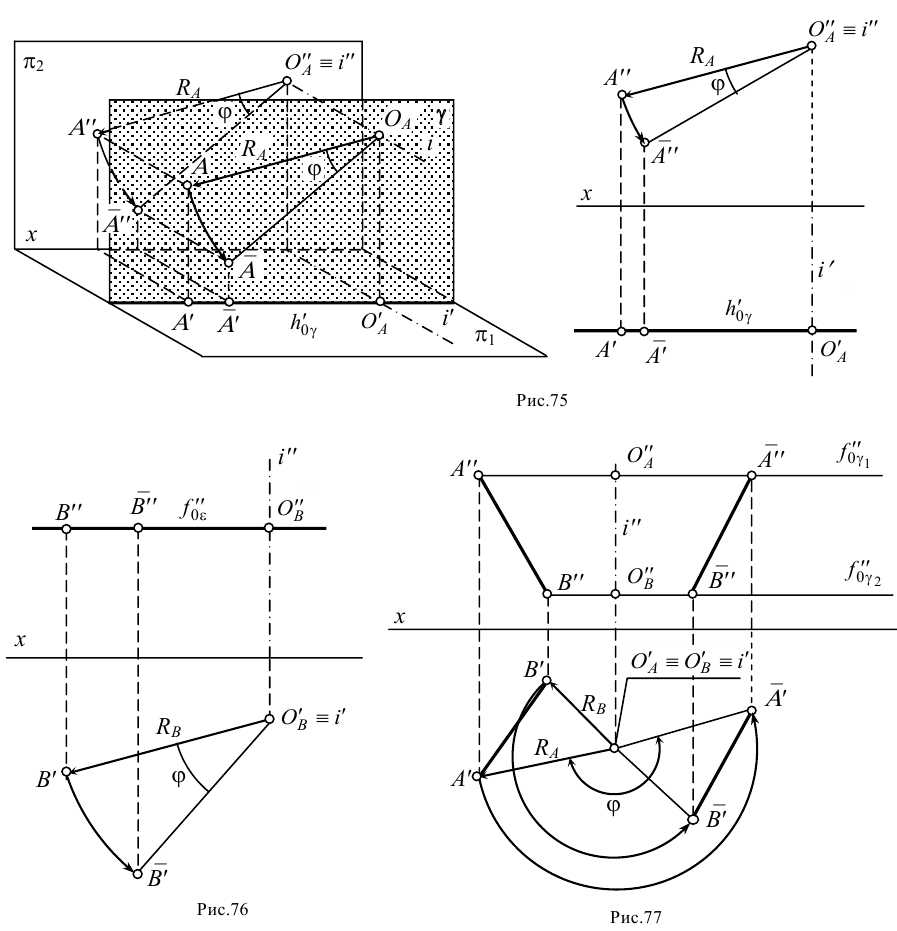
Теперь рассмотрим вращение некоторой точки  вокруг оси, перпендикулярной горизонтальной плоскости проекций (рис.76). На горизонтальную плоскость проекций ось вращения
вокруг оси, перпендикулярной горизонтальной плоскости проекций (рис.76). На горизонтальную плоскость проекций ось вращения  спроецировалась в точку, а на фронтальную – в прямую, перпендикулярную оси
спроецировалась в точку, а на фронтальную – в прямую, перпендикулярную оси  .
.
При вращении точки вокруг оси  ее горизонтальная проекция вращается по дуге окружности, а фронтальная – перемещается по прямой, совпадающей с фронтальным следом плоскости вращения
ее горизонтальная проекция вращается по дуге окружности, а фронтальная – перемещается по прямой, совпадающей с фронтальным следом плоскости вращения  .
.
Таким образом, при вращении точки вокруг оси, перпендикулярной одной из плоскостей проекций, проекция точки на эту плоскость перемещается по дуге окружности радиусом, равным радиусу вращения. Проекция этой точки на другую плоскость проекций перемещается по прямой, перпендикулярной оси вращения.
Для вращения отрезка  вокруг оси, перпендикулярной плоскости
вокруг оси, перпендикулярной плоскости  на некоторый угол
на некоторый угол  (рис.77) нужно повернуть на этот угол любые две его точки (например, концы отрезка -точки
(рис.77) нужно повернуть на этот угол любые две его точки (например, концы отрезка -точки  и
и  ).
).
Горизонтальные проекции этих точек при этом перемещаются в горизонтальных плоскостях  и
и  по дугам окружностей на один и тот же угол . Фронтальные проекции точек и
по дугам окружностей на один и тот же угол . Фронтальные проекции точек и  перемещаются по прямым, параллельным оси , являющимся фронтальными следами плоскостей вращения –
перемещаются по прямым, параллельным оси , являющимся фронтальными следами плоскостей вращения –  и
и  . Точки
. Точки  и
и  – центры вращения этих точек.
– центры вращения этих точек.
Таким образом, при вращении отрезка прямой вокруг оси, перпендикулярной плоскости проекций, длина проекции отрезка прямой на эту плоскость не изменяется.
Вращение прямой значительно упрощается, если ось проходит через одну из точек вращаемой прямой, так как при этом достаточно повернуть лишь одну точку, принадлежащую прямой. На рис.78 ось вращения  проведена перпендикулярно плоскости
проведена перпендикулярно плоскости  через точку
через точку  (положение этой точки при преобразовании изменяться не будет).
(положение этой точки при преобразовании изменяться не будет).
Затем отрезок  повернут вокруг оси в положение, параллельное плоскости
повернут вокруг оси в положение, параллельное плоскости  . При этом горизонтальная проекция отрезка вращается до положения
. При этом горизонтальная проекция отрезка вращается до положения  , параллельного оси
, параллельного оси  . Тогда на фронтальную плоскость проекций этот отрезок спроецируется в натуральную величину, а угол
. Тогда на фронтальную плоскость проекций этот отрезок спроецируется в натуральную величину, а угол  между ее фронтальной проекцией и осью будет равен углу наклона этой прямой к плоскости .
между ее фронтальной проекцией и осью будет равен углу наклона этой прямой к плоскости .
Аналогично, вращением вокруг оси, перпендикулярной плоскости , может быть найдена истинная величина отрезка и угол его наклона к плоскости .
Вращение плоскости сводится к вращению вокруг заданной оси принадлежащих ей геометрических элементов (точек, прямых линий и пр.).
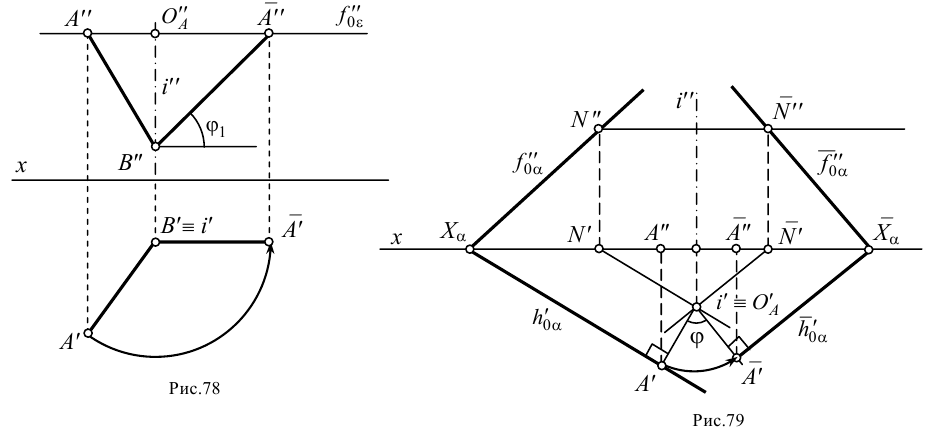
При вращении плоскости, заданной следами, обычно поворачивают один из ее следов и горизонталь (или фронталь) плоскости. Например, для поворота плоскости  вокруг оси на некоторый угол
вокруг оси на некоторый угол  на горизонтальном следе
на горизонтальном следе  выбрана некоторая точка
выбрана некоторая точка  , ближайшая к оси вращения (рис.79). Точка
, ближайшая к оси вращения (рис.79). Точка  повернута на угол
повернута на угол  и через новое положение точки
и через новое положение точки  перпендикулярно
перпендикулярно  проведен след
проведен след  .
.
Затем в плоскости  проведена горизонталь, пересекающая ось вращения. В новом положении горизонтальная проекция горизонтали также будет проходить через ось вращения
проведена горизонталь, пересекающая ось вращения. В новом положении горизонтальная проекция горизонтали также будет проходить через ось вращения  параллельно
параллельно  . Фронтальный след
. Фронтальный след  проведен через точку схода следов
проведен через точку схода следов  и
и  .
.
Пример 12. Определить угол наклона плоскости общего положения  , заданной следами, к горизонтальной плоскости проекций (рис.80).
, заданной следами, к горизонтальной плоскости проекций (рис.80).
Плоскость  преобразуем во фронтально-проецирующую плоскость путем ее вращения вокруг оси , расположенной в плоскости
преобразуем во фронтально-проецирующую плоскость путем ее вращения вокруг оси , расположенной в плоскости  перпендикулярно оси
перпендикулярно оси  . Ось проведена через произвольную точку
. Ось проведена через произвольную точку  фронтального следа
фронтального следа  . След
. След  построен аналогично, но так, чтобы в новом положении он был перпендикулярен оси . Новое положение фронтального следа
построен аналогично, но так, чтобы в новом положении он был перпендикулярен оси . Новое положение фронтального следа  пройдет через проекцию
пройдет через проекцию  и новое положение точки схода следов
и новое положение точки схода следов  .
.
Таким образом,  – искомый угол наклона плоскости к горизонтальной плоскости проекций.
– искомый угол наклона плоскости к горизонтальной плоскости проекций.
Пример 13. Определить истинную величину треугольника  (рис.81).
(рис.81).
Для определения истинной величины треугольника  поворачиваем его дважды: сначала в положение, перпендикулярное плоскости , а затем в положение, параллельное плоскости
поворачиваем его дважды: сначала в положение, перпендикулярное плоскости , а затем в положение, параллельное плоскости  . Тогда в итоге на горизонтальную плоскость проекций треугольник спроецируется без искажения.
. Тогда в итоге на горизонтальную плоскость проекций треугольник спроецируется без искажения.
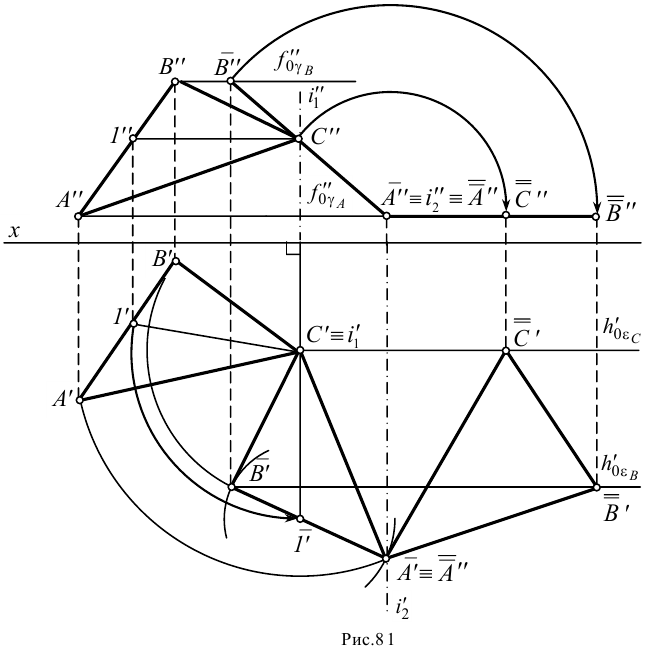
1. Задаем ось вращения  и проводим в плоскости треугольника горизонталь
и проводим в плоскости треугольника горизонталь  . Если повернуть треугольник вокруг оси
. Если повернуть треугольник вокруг оси  в положение, перпендикулярное фронтальной плоскости проекций , то его горизонталь
в положение, перпендикулярное фронтальной плоскости проекций , то его горизонталь  примет положение, перпендикулярное оси
примет положение, перпендикулярное оси 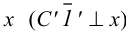 .
.
Точка  , лежащая на оси вращения
, лежащая на оси вращения  , своего положения не изменит. Взаимное положение проекций вершин треугольника на горизонтальной плоскости проекций при этом не изменится.
, своего положения не изменит. Взаимное положение проекций вершин треугольника на горизонтальной плоскости проекций при этом не изменится.
Положение точек  и
и  определяем следующим путем: из
определяем следующим путем: из  проводим дуги окружностей радиусами
проводим дуги окружностей радиусами  и
и  и на этих дугах делаем засечки из точки
и на этих дугах делаем засечки из точки  радиусами соответственно
радиусами соответственно  и
и 
 .
.
2. На фронтальной плоскости проекций проекции вершин треугольника  и
и  будут находиться на пересечении фронтальных следов плоскостей вращения
будут находиться на пересечении фронтальных следов плоскостей вращения  и
и  и линий проекционных связей, проведенных из
и линий проекционных связей, проведенных из  и
и  . На плоскости
. На плоскости  проекция треугольника
проекция треугольника  преобразовалась в отрезок прямой линии.
преобразовалась в отрезок прямой линии.
3. Затем через  проводим вторую ось вращения
проводим вторую ось вращения  , но уже перпендикулярно фронтальной плоскости проекций
, но уже перпендикулярно фронтальной плоскости проекций  . Если треугольник повернуть в положение, параллельное плоскости
. Если треугольник повернуть в положение, параллельное плоскости  , то проекция
, то проекция  окажется параллельной оси
окажется параллельной оси  (положение точки
(положение точки  , лежащей на оси вращения
, лежащей на оси вращения  , остается неизменным). Горизонтальные проекции
, остается неизменным). Горизонтальные проекции  и
и  находятся в пересечении плоскостей вращения
находятся в пересечении плоскостей вращения  и
и  с линиями проекционных связей, проведенными соответственно из
с линиями проекционных связей, проведенными соответственно из  и
и  . Треугольник
. Треугольник  будет истинной величиной треугольника
будет истинной величиной треугольника 
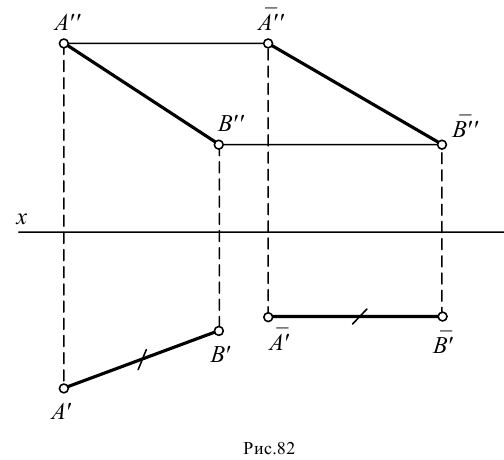
Плоскопараллельное перемещение
Плоскопараллельное перемещение представляет собой частный случай способа вращения вокруг оси, перпендикулярной плоскости проекций  или
или  , при котором на чертеже не изображается ось вращения и не устанавливается радиус вращения. Это делается для того, чтобы избежать наложения исходных и дополнительных проекций.
, при котором на чертеже не изображается ось вращения и не устанавливается радиус вращения. Это делается для того, чтобы избежать наложения исходных и дополнительных проекций.
Новые проекции допускается перемещать на свободное поле чертежа. При этом одна из исходных проекций рассматриваемой геометрической фигуры перемещается в требуемое положение, не изменяя своего вида и размера.
Сущность способа разберем на примере определения истинной величины отрезка прямой общего положения (рис.82). Прямую  переместим в плоскости вращения так, что ее горизонтальная проекция оказалась параллельной оси
переместим в плоскости вращения так, что ее горизонтальная проекция оказалась параллельной оси  . Тогда сама прямая
. Тогда сама прямая  будет параллельна плоскости и ее фронтальная проекция будет истинной величиной заданного отрезка.
будет параллельна плоскости и ее фронтальная проекция будет истинной величиной заданного отрезка.
Пример 14. Методом плоскопараллельного перемещения определить истинную величину треугольника  (рис.83).
(рис.83).
Так же, как и в примере 13, задача решается в два приема.
Сначала плоскость треугольника  преобразуем в положение, перпендикулярное фронтальной плоскости проекций, и она станет фронтально-проецирующей. В этом положении горизонтальная проекция горизонтали
преобразуем в положение, перпендикулярное фронтальной плоскости проекций, и она станет фронтально-проецирующей. В этом положении горизонтальная проекция горизонтали  плоскости треугольника примет положение, перпендикулярное оси , а на фронтальную плоскость проекций треугольник
плоскости треугольника примет положение, перпендикулярное оси , а на фронтальную плоскость проекций треугольник  спроецируется в виде отрезка прямой
спроецируется в виде отрезка прямой  . Горизонтальные проекции
. Горизонтальные проекции  и
и  равны, а место расположения проекции треугольника
равны, а место расположения проекции треугольника  – произвольное.
– произвольное.
Затем плоскость треугольника поворачиваем в положение, параллельное горизонтальной плоскости проекций (в нашем случае  ). Горизонтальная проекция треугольника
). Горизонтальная проекция треугольника  будет его истинной величиной.
будет его истинной величиной.
Вращение вокруг оси, параллельной плоскости проекций
Рассмотрим вращение точки  вокруг горизонтали
вокруг горизонтали  (рис.84). Точка
(рис.84). Точка  будет вращаться в плоскости
будет вращаться в плоскости  , перпендикулярной оси вращения
, перпендикулярной оси вращения  и, следовательно, являющейся горизонтально-проецирующей. Повернем точку
и, следовательно, являющейся горизонтально-проецирующей. Повернем точку  так, чтобы отрезок
так, чтобы отрезок  , равный радиусу вращения
, равный радиусу вращения  , занял положение, параллельное горизонтальной плоскости проекций. Тогда на эту плоскость отрезок спроецируется без искажения.
, занял положение, параллельное горизонтальной плоскости проекций. Тогда на эту плоскость отрезок спроецируется без искажения.
Изобразим вращение точки  на эпюре (рис.84). Радиус вращения точки
на эпюре (рис.84). Радиус вращения точки  как на горизонтальную (отрезок
как на горизонтальную (отрезок  ), так и на фронтальную (отрезок ) плоскости проекций проецируется с искажением. Определим истинную величину радиуса вращения методом прямоугольного треугольника, одним катетом которого является проекция
), так и на фронтальную (отрезок ) плоскости проекций проецируется с искажением. Определим истинную величину радиуса вращения методом прямоугольного треугольника, одним катетом которого является проекция  , а вторым – разность координат по оси
, а вторым – разность координат по оси  . Гипотенуза построенного прямоугольного треугольника
. Гипотенуза построенного прямоугольного треугольника  -истинная величина радиуса вращения точки
-истинная величина радиуса вращения точки  .
.
Новое положение точки  должно находиться на следе
должно находиться на следе  на расстоянии от проекции центра вращения
на расстоянии от проекции центра вращения  . Как правило, этот отрезок переносят на след при помощи дуги окружности с центром в точке
. Как правило, этот отрезок переносят на след при помощи дуги окружности с центром в точке  .
.
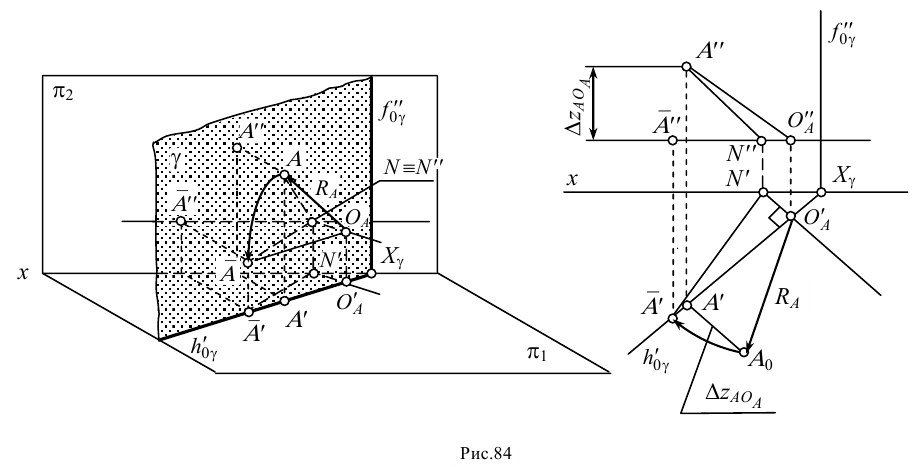
Рассмотрим треугольник  (рис.84). При его вращении вокруг горизонтали
(рис.84). При его вращении вокруг горизонтали  в положение
в положение  он окажется параллельным плоскости
он окажется параллельным плоскости  . Следовательно, его проекция
. Следовательно, его проекция  будет его истинной величиной. И на эпюре треугольник
будет его истинной величиной. И на эпюре треугольник  выражает истинную величину треугольника .
выражает истинную величину треугольника .
Таким образом, любую плоскую фигуру можно повернуть вокруг горизонтали в положение, параллельное горизонтальной плоскости проекций, и получить ее истинную величину.
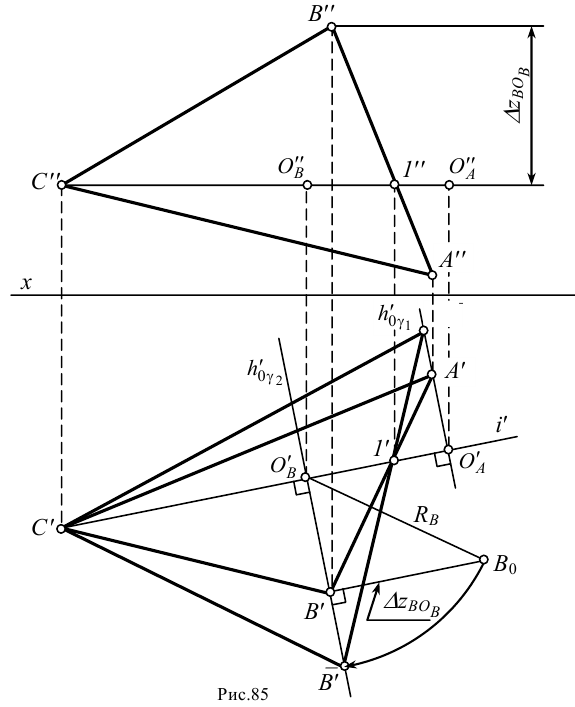
Рассмотрим определение истинной величины треугольника  (рис.85). В качестве оси вращения выберем любую горизонталь плоскости треугольника
(рис.85). В качестве оси вращения выберем любую горизонталь плоскости треугольника  , например проходящую через вершину
, например проходящую через вершину  .
.
При решении задачи будем руководствоваться основными положениями способа вращения:
Поскольку ось вращения  параллельна горизонтальной плоскости проекций, новые положения точек
параллельна горизонтальной плоскости проекций, новые положения точек  и
и  будут находиться на следах соответственно
будут находиться на следах соответственно  и
и  .
.
Точки  и
и 
 – центры вращения вершин треугольника и -лежат в пересечении горизонтальных следов плоскостей вращения с осью вращения.
– центры вращения вершин треугольника и -лежат в пересечении горизонтальных следов плоскостей вращения с осью вращения.
Радиусы вращения вершин и проецируются на плоскости проекций  и
и  с искажением. Для построения нового положения точки
с искажением. Для построения нового положения точки  (точки
(точки  ) достаточно методом прямоугольного треугольника найти истинную величину радиуса вращения
) достаточно методом прямоугольного треугольника найти истинную величину радиуса вращения  , и отложить его на горизонтальном следе плоскости вращения . По построению проекция
, и отложить его на горизонтальном следе плоскости вращения . По построению проекция  находится в пересечении прямой
находится в пересечении прямой  и следа .
и следа .
Фигура  – истинная величина заданного треугольника.
– истинная величина заданного треугольника.
Аналогично рассмотренному примеру можно найти истинную величину любой плоской фигуры вращением вокруг фронтали.
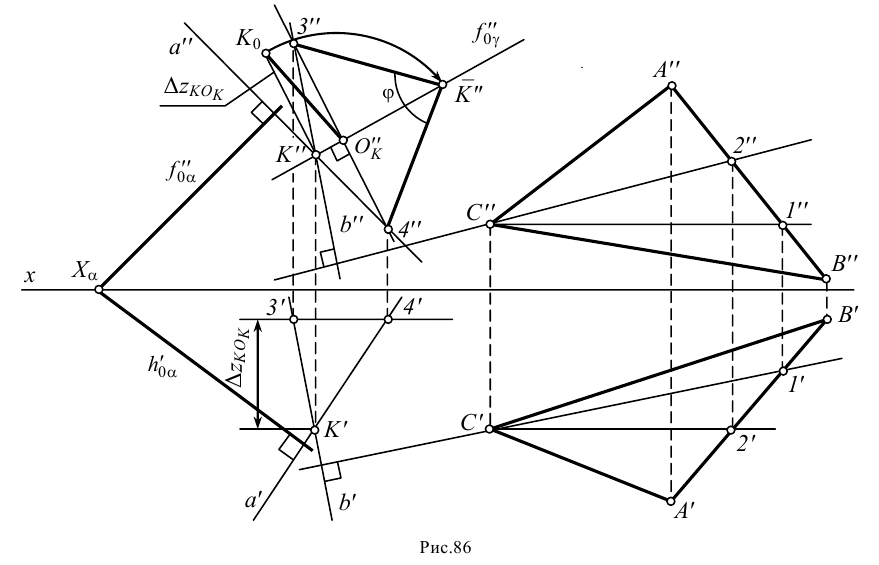
Пример 15. Определить истинную величину угла между двумя пересекающимися плоскостями, одна из которых задана следами ( и
и  ), а другая – треугольником
), а другая – треугольником  (рис.86).
(рис.86).
Угол между плоскостями равен углу между перпендикулярами, опущенными из произвольной точки пространства на данные плоскости.
1. Строим проекции перпендикуляров из произвольно выбранной точки  . Для плоскости
. Для плоскости  проекции перпендикуляров
проекции перпендикуляров  будут перпендикулярны одноименным следам плоскости
будут перпендикулярны одноименным следам плоскости  .
.
Для плоскости, заданной треугольником  , предварительно строим проекции горизонтали
, предварительно строим проекции горизонтали  и фронтали
и фронтали  плоскости треугольника. Горизонтальную проекцию перпендикуляра
плоскости треугольника. Горизонтальную проекцию перпендикуляра  проводим перпендикулярно горизонтальной проекции горизонтали плоскости треугольника
проводим перпендикулярно горизонтальной проекции горизонтали плоскости треугольника  ; фронтальную проекцию перпендикуляра
; фронтальную проекцию перпендикуляра  – перпендикулярно фронтальной проекции фронтали плоскости треугольника
– перпендикулярно фронтальной проекции фронтали плоскости треугольника  .
.
2. Угол между перпендикулярами спроецирован на горизонтальную и фронтальную плоскости проекций с искажением. Для определения истинной величины угла поворачиваем его вокруг фронтали  до положения, параллельного плоскости
до положения, параллельного плоскости  . Через точку
. Через точку  проводим плоскость вращения
проводим плоскость вращения  .
.
Определяем центр вращения точки  .
.
3. Методом прямоугольного треугольника определяем истинную величину радиуса вращения точки  и откладываем эту величину на следе плоскости вращения
и откладываем эту величину на следе плоскости вращения  . Угол
. Угол 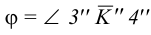 является истинной величиной искомого угла (считается, что угол между двумя плоскостями должен быть меньше
является истинной величиной искомого угла (считается, что угол между двумя плоскостями должен быть меньше  , поэтому, если
, поэтому, если  , то он и является искомым углом между двумя плоскостями; если
, то он и является искомым углом между двумя плоскостями; если  , то искомый угол равен
, то искомый угол равен  ).
).
Вращение плоскости вокруг одного из ее следов (способ совмещения)
Этот способ является частным случаем способа вращения вокруг оси, параллельной плоскости проекций, при котором осью вращения является один из следов плоскости. Цель вращения – совместить заданную плоскость и расположенные в ней геометрические элементы с соответствующей плоскостью проекций. Тем самым можно определить истинные размеры и форму этих элементов. При помощи способа совмещения можно решать и обратные задачи: строить проекции геометрических фигур, лежащих в заданной плоскости, по их истинным размерам и соответствующей точке привязки на плоскости.
Для совмещения плоскости общего положения с плоскостью проекций достаточно совместить с ней одну точку. На рис.87 плоскость  совмещена с горизонтальной плоскостью проекций.
совмещена с горизонтальной плоскостью проекций.
Положение горизонтального следа  , являющегося осью вращения, и точки схода следов
, являющегося осью вращения, и точки схода следов  не изменится. Для определения совмещенного с горизонтальной плоскостью проекций положения фронтального следа
не изменится. Для определения совмещенного с горизонтальной плоскостью проекций положения фронтального следа  выберем на нем произвольную точку
выберем на нем произвольную точку  . Эта точка в процессе вращения будет перемещаться в плоскости
. Эта точка в процессе вращения будет перемещаться в плоскости  , перпендикулярной оси вращения – следу
, перпендикулярной оси вращения – следу  . В пересечении следов
. В пересечении следов  и
и  найдем точку
найдем точку  – горизонтальную проекцию центра вращения точки . Истинную величину
– горизонтальную проекцию центра вращения точки . Истинную величину  радиуса вращения этой точки определяем методом прямоугольного треугольника и откладываем ее на следе . Через точку
радиуса вращения этой точки определяем методом прямоугольного треугольника и откладываем ее на следе . Через точку  и точку схода следов
и точку схода следов  проводим совмещенный с горизонтальной плоскостью проекций фронтальный след плоскости
проводим совмещенный с горизонтальной плоскостью проекций фронтальный след плоскости  .
.
Точка , через которую пройдет след  , может быть найдена также и другим способом – на пересечении дуги радиуса
, может быть найдена также и другим способом – на пересечении дуги радиуса  с горизонтальным следом
с горизонтальным следом  .
.
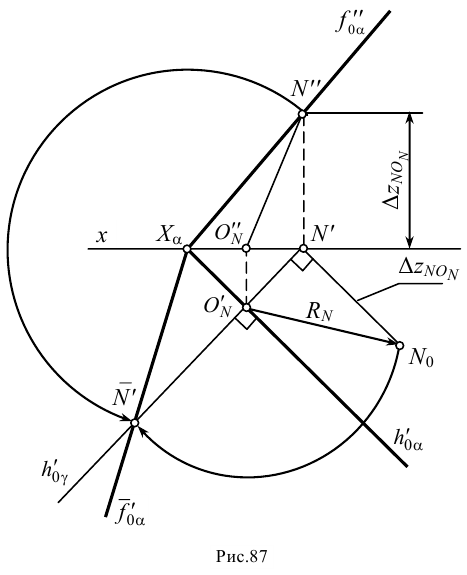
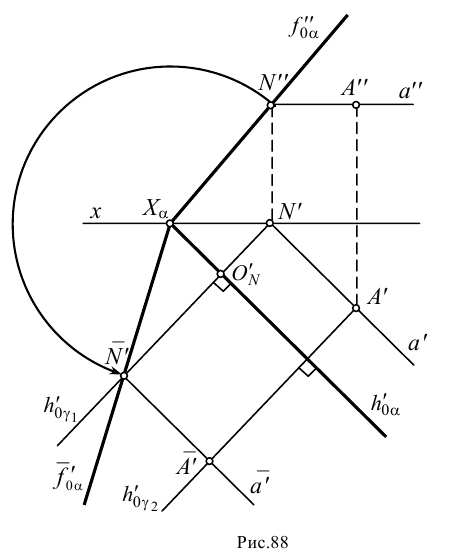
Совмещаем произвольную точку  плоскости
плоскости  с горизонтальной плоскостью проекций (рис.88). Через точку проводим горизонталь
с горизонтальной плоскостью проекций (рис.88). Через точку проводим горизонталь  . Определяем совмещенное с горизонтальной плоскостью проекций положение фронтального следа плоскости
. Определяем совмещенное с горизонтальной плоскостью проекций положение фронтального следа плоскости  . Горизонталь
. Горизонталь  в совмещенном положении будет также параллельна горизонтальному следу плоскости
в совмещенном положении будет также параллельна горизонтальному следу плоскости  . В свою очередь, проекция совмещенного положения точки
. В свою очередь, проекция совмещенного положения точки  (точка
(точка  ) находится в пересечении горизонтали
) находится в пересечении горизонтали  со следом плоскости вращения
со следом плоскости вращения  .
.
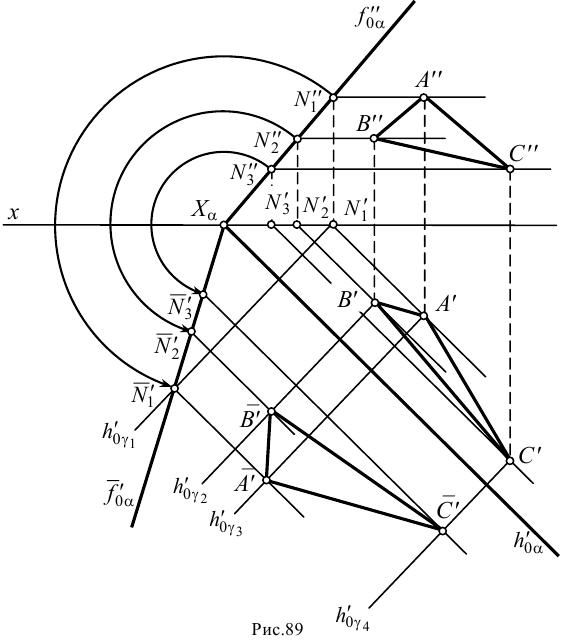
Рассмотрим пример использования способа совмещения при определении истинной величины плоской фигуры, лежащей в плоскости общего положения  (рис.89). Аналогично ранее рассмотренным примерам построим совмещенное с горизонтальной плоскостью проекций положение фронтального следа
(рис.89). Аналогично ранее рассмотренным примерам построим совмещенное с горизонтальной плоскостью проекций положение фронтального следа  плоскости . Затем проводим горизонтали, проходящие через вершины треугольника, сначала – в пространстве, а затем – в совмещенном с плоскостью
плоскости . Затем проводим горизонтали, проходящие через вершины треугольника, сначала – в пространстве, а затем – в совмещенном с плоскостью  положении (горизонтальные проекции горизонталей будут параллельны горизонтальному следу
положении (горизонтальные проекции горизонталей будут параллельны горизонтальному следу  ).
).
Вершины треугольника  ,
,  и
и  находим на пересечении горизонтальных следов плоскостей вращения
находим на пересечении горизонтальных следов плоскостей вращения  ,
,  и
и  проходящих через точки
проходящих через точки  ,
,  и
и  и перпендикулярных горизонтальному следу
и перпендикулярных горизонтальному следу  , с соответствующими горизонталями.
, с соответствующими горизонталями.
Треугольник  есть истинная величина заданного треугольника.
есть истинная величина заданного треугольника.
Метод перемены плоскостей проекций
Суть данного метода заключается в том, что положение проецируемых геометрических элементов в пространстве остается неизменным, а в существующую систему плоскостей проекций вводится одна (или несколько) плоскостей проекций, по отношению к которой тот или иной геометрический элемент будет занимать какое-либо частное положение. Новые проекции точек при введении дополнительных плоскостей проекций обозначают римскими цифрами: например,  – проекция точки
– проекция точки  на дополнительной плоскости
на дополнительной плоскости  ;
;  – проекция точки на дополнительной плоскости
– проекция точки на дополнительной плоскости  и т.д.
и т.д.
Пусть задана точка с проекциями  и
и  в системе плоскостей проекций
в системе плоскостей проекций  и
и  (рис.90). Строим проекции этой точки в новой системе
(рис.90). Строим проекции этой точки в новой системе  , где новая плоскость проекций
, где новая плоскость проекций  также перпендикулярна плоскости . Опустив из точки
также перпендикулярна плоскости . Опустив из точки  перпендикуляр на плоскость , получаем новую проекцию точки
перпендикуляр на плоскость , получаем новую проекцию точки  (точку
(точку  ). Отметим, что расстояние от точки до плоскости в старой и в новой системах одинаковы, т.е.
). Отметим, что расстояние от точки до плоскости в старой и в новой системах одинаковы, т.е.  .
.
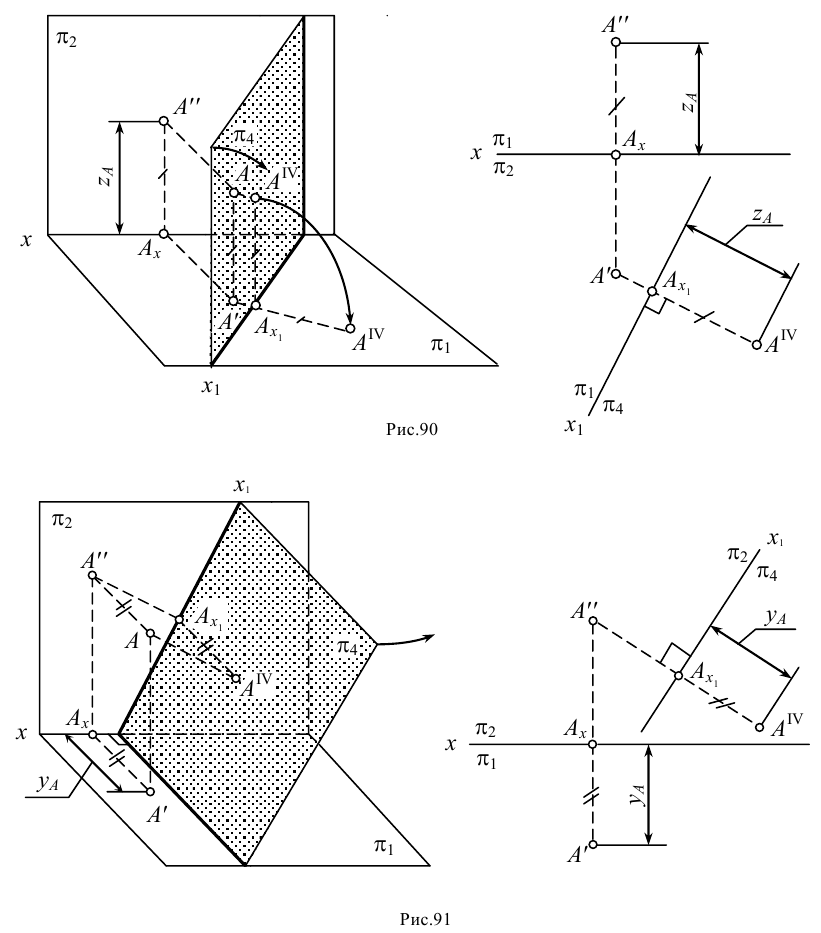
Для получения эпюра (рис.90) плоскость  вращением вокруг оси проекций
вращением вокруг оси проекций  совмещаем с плоскостью
совмещаем с плоскостью  , а затем – с плоскостью чертежа. Оси проекций на эпюре принято дополнительно отмечать в виде дроби, числитель и знаменатель которой – плоскости проекций, пересекающихся по этой оси. Считается, что дробная черта лежит на самой оси, причем обозначения плоскостей ставят со стороны «видимых» проекций (например, ось
, а затем – с плоскостью чертежа. Оси проекций на эпюре принято дополнительно отмечать в виде дроби, числитель и знаменатель которой – плоскости проекций, пересекающихся по этой оси. Считается, что дробная черта лежит на самой оси, причем обозначения плоскостей ставят со стороны «видимых» проекций (например, ось  обозначают
обозначают  ).
).
Для построения проекции  на эпюре достаточно из проекции
на эпюре достаточно из проекции  провести перпендикуляр к новой оси
провести перпендикуляр к новой оси  и от точки
и от точки  отложить расстояние, равное координате
отложить расстояние, равное координате  точки
точки  .
.
Дополнительная плоскость проекций  может быть выбрана и перпендикулярной плоскости
может быть выбрана и перпендикулярной плоскости  (рис.91) Тогда плоскость
(рис.91) Тогда плоскость  вращением вокруг новой оси проекций , совмещаем с
вращением вокруг новой оси проекций , совмещаем с  , которую и принимаем за плоскость чертежа. При этом расстояния от точки
, которую и принимаем за плоскость чертежа. При этом расстояния от точки  до плоскости в предыдущей и в новой системе плоскостей проекций одинаковы, т.е.
до плоскости в предыдущей и в новой системе плоскостей проекций одинаковы, т.е.  .
.
При помощи метода перемены плоскостей проекций значительно упрощается решение задач, связанных с определением расстояний и углов между геометрическим объектами.
Примеры решения задач методом перемены плоскостей проекций
Пример 16. Определить истинную величину отрезка прямой  и угол наклона этой прямой к плоскости
и угол наклона этой прямой к плоскости  (рис.92).
(рис.92).
Для определения истинной величины отрезка  необходимо ввести плоскость проекций
необходимо ввести плоскость проекций  , перпендикулярную одной из имеющихся плоскостей проекций, например плоскости
, перпендикулярную одной из имеющихся плоскостей проекций, например плоскости  и параллельную заданной прямой:
и параллельную заданной прямой:
Выполняем переход от системы плоскостей  к системе
к системе  . На эпюре новая ось проекций
. На эпюре новая ось проекций  будет параллельна горизонтальной проекции отрезка . Вычерчиваем эту ось в любом месте чертежа с условием
будет параллельна горизонтальной проекции отрезка . Вычерчиваем эту ось в любом месте чертежа с условием
Для построения проекций точек  и
и  на плоскости из их горизонтальных проекций проводим линии проекционных связей перпендикулярно оси , на которых откладываем координаты
на плоскости из их горизонтальных проекций проводим линии проекционных связей перпендикулярно оси , на которых откладываем координаты  соответствующих точек:
соответствующих точек:

Истинной величиной отрезка будет отрезок  , а углом наклона прямой к плоскости
, а углом наклона прямой к плоскости  – угол
– угол  между новой проекцией отрезка и осью .
между новой проекцией отрезка и осью .
Пример 17. Определить истинную величину отрезка прямой  и угол наклона этой прямой к плоскости проекций
и угол наклона этой прямой к плоскости проекций  (рис.93).
(рис.93).
Вводим новую плоскость проекций из условия

Строим новую ось
и новые проекции точек и на плоскости . Для этого по линии проекционных связей, проведенных из фронтальных проекций  и
и  перпендикулярно оси
перпендикулярно оси  , откладываем координаты у соответствующих точек.
, откладываем координаты у соответствующих точек.
Истинной величиной отрезка  будет отрезок
будет отрезок  , а углом наклона к плоскости
, а углом наклона к плоскости  – угол
– угол  .
.
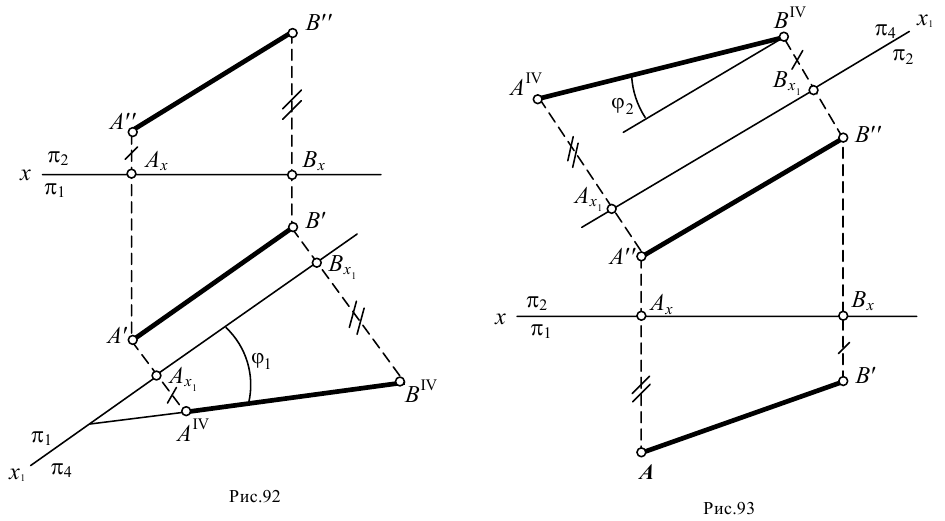
Пример 18. Определить угол наклона плоскости  к плоскости проекций
к плоскости проекций  (рис.94).
(рис.94).
Для определения угла наклона плоскости  к плоскости
к плоскости  необходимо перейти к такой системе проекций, в которой эта плоскость стала бы проецирующей по отношению к вновь вводимой плоскости проекций.
необходимо перейти к такой системе проекций, в которой эта плоскость стала бы проецирующей по отношению к вновь вводимой плоскости проекций.
Введем плоскость проекций  из условия
из условия
Если плоскость является проецирующей по отношению к новой плоскости проекций  , то на эпюре горизонтальный след
, то на эпюре горизонтальный след  должен быть перпендикулярен новой оси проекций
должен быть перпендикулярен новой оси проекций  (ось
(ось  строим в любом месте чертежа, так, чтобы она оказалась перпендикулярной следу ). В пересечении и оси получаем точку схода следов
строим в любом месте чертежа, так, чтобы она оказалась перпендикулярной следу ). В пересечении и оси получаем точку схода следов  .
.
Для построения второго следа плоскости в системе проекций выбираем произвольную точку  , лежащую на фронтальном следе плоскости
, лежащую на фронтальном следе плоскости  , и строим ее проекцию
, и строим ее проекцию  в системе
в системе  .
.
Через точку схода следов  и
и  проводим новый фронтальный след
проводим новый фронтальный след  плоскости . Угол наклона
плоскости . Угол наклона  плоскости к плоскости
плоскости к плоскости  равняется углу между
равняется углу между  и новой осью проекций
и новой осью проекций  .
.
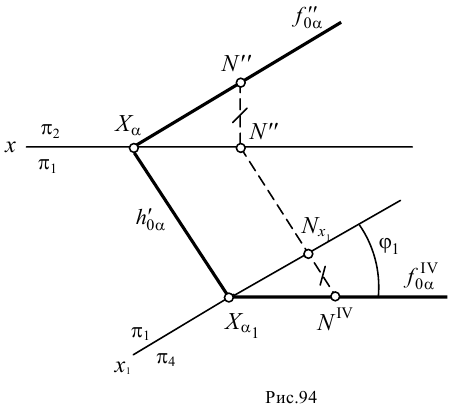
Пример 19. Определить истинную величину расстояния от точки  до плоскости, заданной треугольником
до плоскости, заданной треугольником  (рис.95).
(рис.95).
В плоскости треугольника строим горизонталь 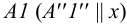 . Переходим от системы проекций
. Переходим от системы проекций  к системе таким образом, чтобы горизонталь
к системе таким образом, чтобы горизонталь  стала перпендикулярна плоскости проекций
стала перпендикулярна плоскости проекций  .
.
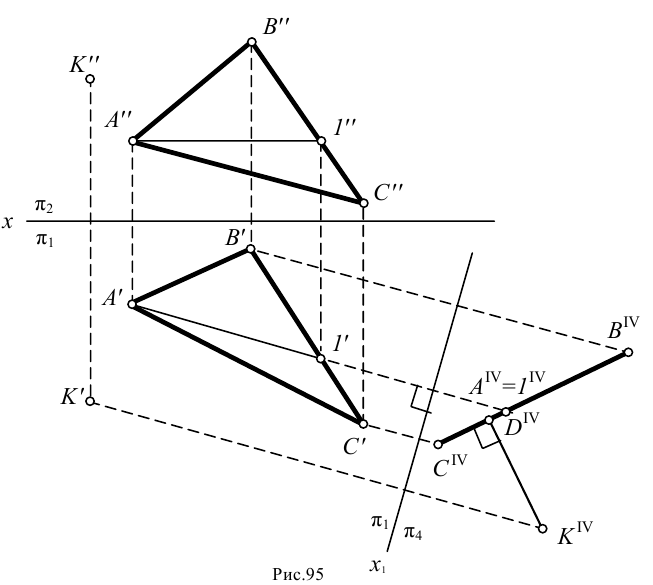
Тогда и плоскость треугольника  будет перпендикулярна вводимой плоскости
будет перпендикулярна вводимой плоскости  .
.
Поскольку плоскость треугольника перпендикулярна  , он спроецируется на эту плоскость в виде отрезка прямой линии
, он спроецируется на эту плоскость в виде отрезка прямой линии  . Построив проекцию точки
. Построив проекцию точки  на плоскости
на плоскости  и опустив из нее перпендикуляр к прямой
и опустив из нее перпендикуляр к прямой  , получим отрезок
, получим отрезок  , равный искомому расстоянию.
, равный искомому расстоянию.
Пример 20. Определить расстояние от точки  до прямой
до прямой  (рис.96).
(рис.96).
Вводим дополнительную плоскость проекций  перпендикулярно
перпендикулярно  так, чтобы она была параллельна прямой
так, чтобы она была параллельна прямой  :
:
Проводим новую ось  параллельно горизонтальной проекции
параллельно горизонтальной проекции  и строим проекции точки
и строим проекции точки  и прямой
и прямой  на плоскости .
на плоскости .
После этого вводим вторую дополнительную плоскость проекций  :
:

На эпюре новая ось  перпендикулярна
перпендикулярна  . Прямая
. Прямая  спроецируется на плоскости в точку
спроецируется на плоскости в точку  . Поэтому расстояние от проекции
. Поэтому расстояние от проекции  до проекции
до проекции  и будет расстоянием
и будет расстоянием  между точкой
между точкой  и прямой
и прямой 
Пример 21. Определить кратчайшее расстояние между скрещивающимися прямыми  и
и  (рис.97).
(рис.97).
Вводим первую дополнительную плоскость проекций таким образом, чтобы эта плоскость была перпендикулярна одной из имеющихся плоскостей проекций и параллельна одной из заданных прямых, например:
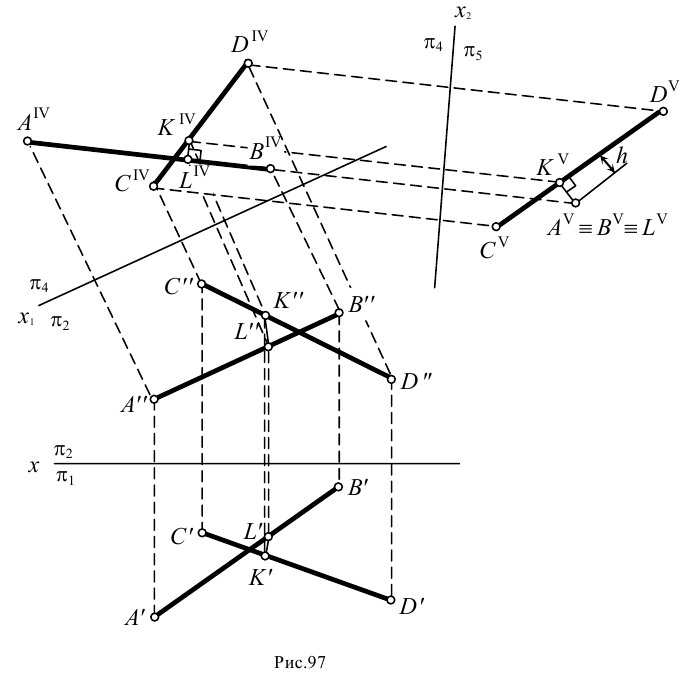
На эпюре вычерчиваем новую ось проекций параллельно фронтальной проекции прямой  :
:
Строим проекции заданных прямых на плоскости  .
.
Вводим вторую дополнительную плоскость проекций  таким образом, чтобы вводимая плоскость была перпендикулярной плоскости
таким образом, чтобы вводимая плоскость была перпендикулярной плоскости  и прямой
и прямой  :
:

На эпюре строим новую ось перпендикулярно проекции  :
:
Строим проекции прямых  и
и  на плоскости
на плоскости  ). При этом прямая спроецируется в точку
). При этом прямая спроецируется в точку  . Перпендикуляр, опущенный из этой точки на отрезок
. Перпендикуляр, опущенный из этой точки на отрезок  , и будет истинной величиной расстояния
, и будет истинной величиной расстояния  между скрещивающимися прямыми и .
между скрещивающимися прямыми и .
Полученное решение можно дополнить построением проекций перпендикуляра  на плоскостях
на плоскостях  ,
,  и
и  . Построения проекций точки
. Построения проекций точки  выполняются обратным ходом:
выполняются обратным ходом:

Чтобы построить проекцию точки  на плоскости
на плоскости  надо из
надо из  опустить перпендикуляр к
опустить перпендикуляр к  и далее
и далее  .
.
Пример 22. Определить истинную величину треугольника  (рис.98).
(рис.98).
Сначала так же, как в примере 19, переходим от системы  к системе
к системе  таким образом, чтобы плоскость треугольника
таким образом, чтобы плоскость треугольника  стала перпендикулярна вводимой плоскости
стала перпендикулярна вводимой плоскости  . Вводим дополнительную плоскость проекций
. Вводим дополнительную плоскость проекций  по следующей схеме:
по следующей схеме:

Для этого в плоскости треугольника проводим горизонталь  и строим новую ось проекций
и строим новую ось проекций  так, чтобы она оказалась перпендикулярной горизонтальной проекции горизонтали:
так, чтобы она оказалась перпендикулярной горизонтальной проекции горизонтали:
Поскольку плоскость треугольника перпендикулярна , он спроецируется на эту плоскость в виде отрезка прямой линии  .
.
Теперь вводим вторую дополнительную плоскость проекций  , перпендикулярную плоскости и параллельную плоскости треугольника :
, перпендикулярную плоскости и параллельную плоскости треугольника :

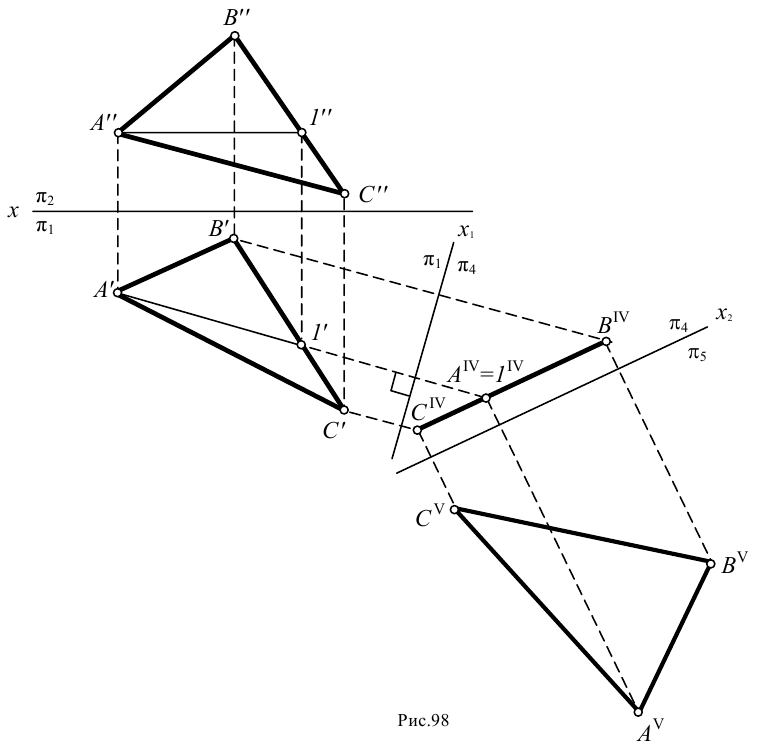
Ось проекций  проводим параллельно
проводим параллельно  . Строим проекции вершин треугольника на плоскости
. Строим проекции вершин треугольника на плоскости  . Поскольку плоскость проекций
. Поскольку плоскость проекций  параллельна плоскости треугольника, на нее треугольник спроецируется без искажения. Треугольник
параллельна плоскости треугольника, на нее треугольник спроецируется без искажения. Треугольник  – истинная величина заданного треугольника.
– истинная величина заданного треугольника.
Пример 23. Определить угол между двумя пересекающимися плоскостями  и
и  (рис.99).
(рис.99).
Угол между пересекающимися плоскостями может быть построен в плоскости, перпендикулярной линии пересечения этих плоскостей. Следовательно, в первую очередь необходимо построить на эпюре проекции линии пересечения плоскостей  и
и  . В нашем случае это прямая
. В нашем случае это прямая  .
.
После этого вводим первую дополнительную плоскость проекций  таким образом, чтобы она была параллельна линии пересечения:
таким образом, чтобы она была параллельна линии пересечения:

На эпюре новая ось  будет параллельна горизонтальной проекции линии пересечения:
будет параллельна горизонтальной проекции линии пересечения:
Далее строим проекции линии пересечения  на плоскости
на плоскости  . Поскольку линия пересечения плоскостей и
. Поскольку линия пересечения плоскостей и  параллельна плоскости проекций , следы этих плоскостей на данной плоскости проекций будут параллельны ей:
параллельна плоскости проекций , следы этих плоскостей на данной плоскости проекций будут параллельны ей:

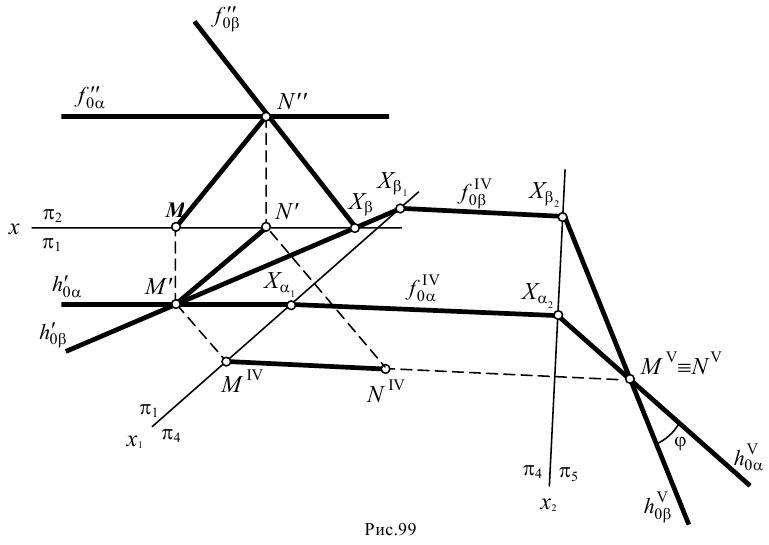
Далее вводим вторую дополнительную плоскость проекций – плоскость  таким образом, чтобы линия пересечения плоскостей
таким образом, чтобы линия пересечения плоскостей  оказалась перпендикулярной вновь вводимой плоскости:
оказалась перпендикулярной вновь вводимой плоскости:

На эпюре строим ось  :
:
В пересечении следов  и
и  с осью получаем точки схода следов соответственно
с осью получаем точки схода следов соответственно  и
и  . Строим проекцию линии пересечения на плоскости
. Строим проекцию линии пересечения на плоскости  . Новые следы
. Новые следы  и
и  плоскостей и пройдут через точки схода следов и и точку
плоскостей и пройдут через точки схода следов и и точку  .
.
В результате проведенных построений плоскости и стали перпендикулярны плоскости проекций  , и угол
, и угол  между следами и и есть искомый угол между плоскостями.
между следами и и есть искомый угол между плоскостями.
- Взаимное положение прямой и плоскости
- Решение метрических задач
- Тени в ортогональных проекциях
- Кривые поверхности
- Кривые линии
- Образование и задание поверхности на чертеже
- Пересечение поверхности плоскостью и прямой
- Развертки поверхностей
4.1. Способ перемены плоскостей проекций
Чаще всего геометрические объекты расположены относительно плоскостей проекций в общем положении, и при решении задач для достижения поставленной цели необходимо выполнять много построений.
Количество построений можно значительно сократить, если геометрические элементы будут расположены в частном положении относительно плоскостей проекций.
Существуют два основных способа преобразования чертежа, при которых:
- Объект остаётся неподвижным, при этом меняется аппарат проецирования;
- Условия проецирования не меняются, но изменяется положение объекта в пространстве.
К первому способу относится способ перемены плоскостей проекций.
Ко второму – способ вращения (вращение вокруг линии уровня и вращение вокруг проецирующей прямой); способ плоскопараллельного перемещения.
Рассмотрим наиболее часто используемые способы при решении задач.
Способ перемены плоскостей проекций или способ введения дополнительных плоскостей проекций (ДПП) позволяет перейти от заданной системы плоскостей проекций к новой системе, более удобной для решения той или иной задачи.
Рассмотрим положение точки А относительно известной системы плоскостей проекций π2⊥π1 (Рисунок 4.1, а и б).
Введём π4⊥π1, при этом получим новую систему двух взаимно перпендикулярных плоскостей. Положение точки А на эпюре будет в этом случае задано проекциями А1 и А4.
Правила перемены плоскостей проекций:
- Новая плоскость проекций вводится перпендикулярно, по крайней мере, одной из заданных на чертеже плоскостей проекций;
- ДПП располагается относительно проецируемого объекта в частном положении, удобном для решения поставленной задачи;
- Новую плоскость совмещаем вращением вокруг новой оси проекций с плоскостью, которой она перпендикулярна на свободное место так, чтобы проекции не накладывались друг на друга.
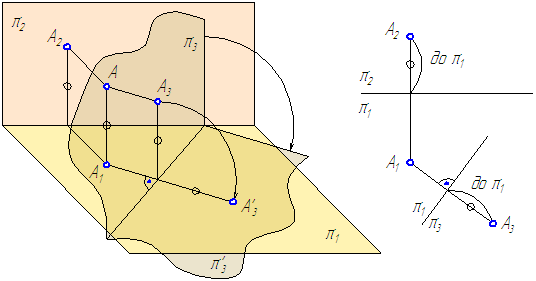
а б
Рисунок 4.1 – Способ перемены плоскостей проекций
Свойства:
- На чертеже новая проекция геометрического элемента находится на линии связи, перпендикулярной новой оси проекций:
А1А4 ⊥ π1/π4.
- Расстояние от А4 до π1/π4 равно расстоянию от А2 до π2/π1, так как величина этих отрезков (отмечены ○) определяет расстояние от точки А до плоскости проекций π1.
При решении задачи необходимо заранее обдумать, как расположить новую плоскость проекций относительно заданных геометрических объектов (прямой, плоскости и др.), и как на чертеже провести новую ось проекций, чтобы в новой системе плоскостей заданные объекты заняли бы частные положения по отношению к новой плоскости проекций.
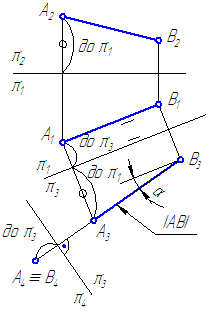
Рисунок 4.2
Упражнение
1. Спроецировать отрезок общего положения АВ в точку.
Последовательность решения:
- Введём ДПП π4//А1В1 и π4⊥π1 (Рисунок 4.2). В новой системе двух взаимно перпендикулярных плоскостей проекций π1/π4 отрезок АВспроецируется на π4 в натуральную величину и по этой проекции можем определить угол наклона отрезка к плоскости проекций π1
(α=∠А4В4; π1/π4).
- Введём ДПП π5⊥А4В4 и π5⊥π4. На π4 отрезок АВ спроецируется в точку, то есть А5≡В5, что означает АВ⊥π5.
Упражнение
2. Дана плоскость общего положения – σ, заданная треугольником АВС (Рисунок 4.3).
Определить истинную величину треугольника.
Последовательность решения:
- Введём ДПП π4⊥σ и π4⊥π1, для чего построим горизонталь в плоскости треугольника и проведём новую ось проекций π1/π4⊥g1согласно теореме о перпендикуляре к плоскости. На π4 плоскость σ спроецируется в прямую, что означает σ⊥πp4.
- Введём ДПП π5//σ (π4/π5//А4В4С4) и π4⊥π5. На π5 проекция А5В5С5 – есть истинная величина треугольника.
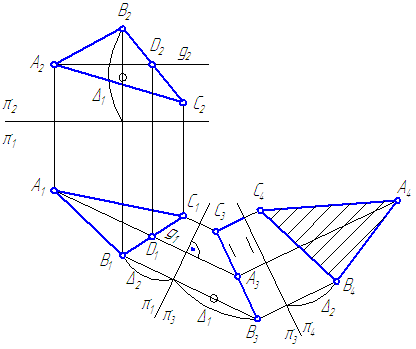
Рисунок 4.3
4.2. Способ вращения
Сущность способа вращения состоит в том, что положение системы плоскостей проекций считается неизменным в пространстве, а положение проецируемого объекта относительно неподвижных плоскостей изменяется.
Из сравнения сущности обоих способов видно, что решение задач, которые требуют применения преобразования ортогонального чертежа, может быть выполнено любым из этих способов, результат при этом должен получиться одинаковым. Основа выбора того или иного способа – рациональность решения.
Вращение заданных элементов будем осуществлять вокруг проецирующей прямой, то есть прямой, перпендикулярной какой-либо плоскости проекций, при этом все точки заданных элементов поворачиваются в одну и ту же сторону на один и тот же угол (Рисунок 4.4, а и б). Ось вращения и объект вращения составляют твёрдое тело.
Введём обозначения:
m⊥π2 – ось вращения;
А – точка в пространстве;
О – центр вращения точки А;
АО – радиус вращения
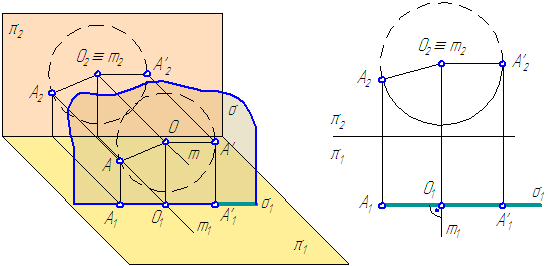
а б
Рисунок 4.4 – Способ вращения вокруг прямой, перпендикулярной π2
Точка описывает в пространстве окружность радиусом АО. Плоскость окружности перпендикулярна оси вращения (σ⊥m).
Так как m⊥π2 , то σ//π2, следовательно, σ⊥π1, ⇒ σ1⊥m1, и поэтому σ проецируется на π1 в виде прямой, перпендикулярной проекции оси вращения, а на π2 траектория вращающейся точки проецируется в виде окружности с центром О2≡m2.
Пусть ось вращения m⊥π1 (Рисунок 4.5, а и б). Плоскость окружности σ⊥m.
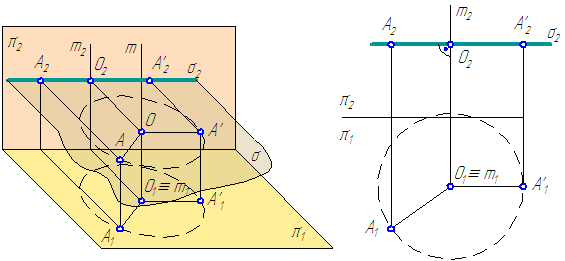
а б
Рисунок 4.5 – Вращение вокруг прямой, перпендикулярной π1
left.begin{array}{l}sigmaparallelpi_1\sigmaperp pi_2\end{array}right} npu;mperppi_1Longrightarrowsigma_2perp m_2
Свойства проекций
- На плоскость проекций, перпендикулярную оси вращения, траектория вращающейся вокруг этой оси точки проецируется без искажения, то есть в окружность с центром, совпадающим с проекцией оси вращения на эту плоскость и радиусом, равным расстоянию от вращаемой точки до оси вращения.
- На плоскость проекций, параллельную оси вращения, траектория вращающейся точки проецируется в отрезок, перпендикулярный проекции оси вращения на эту плоскость.
- На плоскость проекций, перпендикулярную оси вращения, проекция вращаемого объекта своих размеров и формы не меняет.
Упражнение
Дано: отрезок общего положения – АВ.
Определить: способом вращения истинную величину отрезка и углы наклона его к плоскостям проекций.
Решение
1. Выберем ось вращения m⊥π1 и проходящую через точку В (Рисунок 4.6).
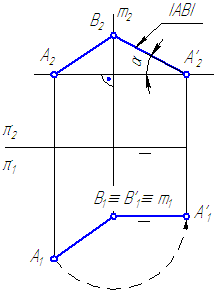
Рисунок 4.6
На плоскости проекций π2 проекция траектории перемещения точки А – прямая,
A_2 overline{A_2}perp m_2;u;A_2overline{A_2}parallelpi_2/pi_1
На плоскости проекций π1 проекция траектории перемещения точки А – окружность радиусом |А1В1|.
Повернем отрезок до положения, параллельного плоскости проекций π2. Получим натуральную величину отрезка.
overline{A}_2overline{B}_2parallelpi_2/pi_1Rightarrow ABparallelpi_2Rightarrowoverline{A}_2overline{B}_2=|AB|
Угол наклона отрезка АВ к плоскости проекций π1 будет угол
alpha=anglewidehat{A_2overline{A}_2;;overline{A}_2overline{B}_2}.
Для того, чтобы определить угол наклона АВ к плоскости проекций π2, надо ввести новую ось вращения перпендикулярно π2 и повторить построения.
4.3. Определение истинной величины треугольника способом вращения
Пусть плоскость σ задана треугольником. Необходимо определить истинную величину треугольника (Рисунок 4.7).
Одним поворотом вокруг оси, перпендикулярной к плоскости проекций, истинную форму треугольника получить нельзя (так же как и введением одной ДПП).
Вращая вокруг оси m, перпендикулярной π1 можно расположить плоскость ΔАВС⊥π2 (а вращая вокруг оси n⊥π2 можно расположить плоскость ΔАВС⊥π1).
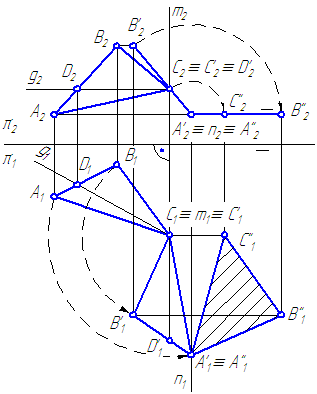
Рисунок 4.7
- Положим σ’ должна быть перпендикулярна π2. Для чего построим CD – горизонталь h плоскости σ. Введём первую ось вращения m⊥π1, например, через точку С.
- Повернём треугольник вокруг m до положения, когда
overline{CD}perppi_2Rightarrowoverline{C}_1overline{D}_1perppi_2/pi_1
На основании 3-го свойства, новая горизонтальная проекция треугольника overline{A_1B_1C_1} по величине должна равняться A1B1C1, а фронтальная проекция треугольника будет представлять отрезок. - Введём вторую ось вращения n⊥π2 через точку overline{A}_2. Повернём фронтальную проекцию overline{B_2C_2A_2} в новое положение overline{overline{B_2}overline{C_2}overline{A_2}}parallelpi_2/pi_1. На π1 получим треугольник overline{overline{B_1}overline{C_1}overline{A_1}}, равный истинной величине треугольника АВС.
4.4. Задачи для самостоятельной работы
Двумя способами преобразования ортогонального чертежа:
1. Определить расстояние от точки D до отрезка АВ – общего положения (Рисунок 4.8).
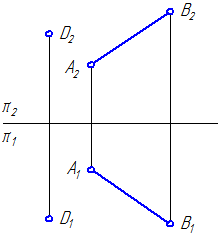
Рисунок 4.8
2. Определить расстояние между двумя параллельными прямыми общего положения (АВ//CD) (Рисунок 4.9).
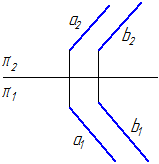
Рисунок 4.9
3. Определить расстояние между двумя скрещивающимися прямыми, заданными отрезками АВ и CD (Рисунок 4.10).
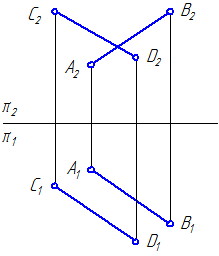
Рисунок 4.10
4. Построить недостающую проекцию точки D при условии, что задана σ=ΔАВС – общего положения и первая проекция точки D1, Dотстоит от плоскости σ на 30 мм (Рисунок 4.11).
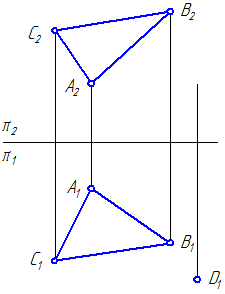
Рисунок 4.11
5. Дан отрезок АВ – общего положения. Ось вращения не проходит через АВ (Рисунок 4.12). Определить способом вращения истинную величину АВ.
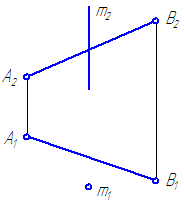
Рисунок 4.12
6. Задана прямая общего положения m и точка А вне прямой. Построить плоскость, проходящую через точку А и перпендикулярную прямой m (Рисунок 4.13).
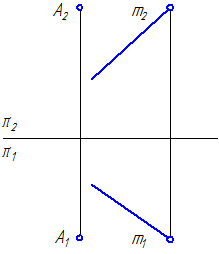
Рисунок 4.13
Метод вращения вокруг оси
Одним из наиболее эффективных методов определения метрических характеристик плоских фигур является вращение вокруг оси, в качестве которой обычно используют линию уровня или проецирующую прямую.
Способ вращения вокруг проецирующей прямой
Перемещение точки при её вращении вокруг проецирующей прямой является частным случаем параллельного перемещения и подчиняется следующим правилам.
- Траектория движения точки – дуга окружности с центром, расположенным на оси вращения. Радиус окружности равен расстоянию между точкой и осью вращения.
- При вращении точки вокруг прямой, перпендикулярной фронтальной плоскости проекции, фронтальная проекция точки перемещается по дуге окружности, а горизонтальная – параллельно оси X.
- При вращении точки вокруг прямой, перпендикулярной горизонтальной плоскости проекции, горизонтальная проекция точки перемещается по дуге окружности, а фронтальная – параллельно оси X.
Руководствуясь рассмотренными правилами, повернем отрезок CD в положение, параллельное фронтальной плоскости проекции. В качестве оси вращения i будем использовать горизонтально проецирующую прямую, проведенную через точку D.
При повороте отрезка положение точки D не изменится, поскольку она лежит на оси i. Точку C’ переместим по дуге окружности радиусом C’D’ в положение C’1 так, чтобы выполнялось условие C’1D’1 || X. Для нахождения точки C”1 из C” проведем прямую, параллельную оси X, до пересечения её с линией связи, восстановленной из т. C’1.
На следующем рисунке показан способ перевода отрезка в горизонтально проецирующее положение. Построения выполнены в два этапа и описаны ниже.
Сначала вращением вокруг оси i1 CD перемещают в положение C1D1, параллельное фронтальной плоскости проекции. После этого вращением вокруг оси i2 отрезок переводится в искомое положение C2D2, где он перпендикулярен горизонтальной плоскости проекции.
Расположение осей вращения выбирают исходя из удобства дальнейших построений. В нашей задаче горизонтально проецирующая прямая i1 проходит через точку D, а проекция i”2 фронтально проецирующей прямой i2 лежит на продолжении отрезка C”1D”1.
Способ вращения вокруг линии уровня
Действенным и наиболее рациональным приемом решения задач, в которых требуется определить натуральную величину угла, является способ вращения вокруг линии уровня.
Основные правила построения
- Радиус вращения точки равен расстоянию между точкой и линией уровня, выполняющей роль оси. Натуральную величину радиуса определяют методом прямоугольного треугольника.
- При вращении вокруг горизонтали h точка перемещается по окружности, которая проецируется на горизонтальную плоскость в отрезок прямой, перпендикулярный горизонтальной проекции горизонтали h’. На фронтальную плоскость окружность, по которой движется точка, проецируется в эллипс. Строить его нет необходимости.
- При вращении вокруг фронтали f точка перемещается по окружности, которая проецируется на фронтальную плоскость в отрезок прямой, перпендикулярный фронтальной проекции фронтали f”. Вместе с тем горизонтальная проекция линии перемещения представляет собой эллипс, строить который не обязательно.
Рассмотрим, как определить действительную величину угла между прямыми a и b, пересекающимися в точке A. Построения представлены на рисунке и выполнены согласно алгоритму, который описан ниже.
- Проводим фронтальную проекцию h” горизонтали h. Она пересекает прямые a” и b” в точках 1” и 2”. Определяем горизонтальные проекции 1′ и 2′ и через них проводим h’.
- Находим центр вращения O. Его горизонтальная проекция O’ лежит на пересечении прямой h’ с перпендикуляром, проведенным из A’ к h’.
- Определяем натуральную величину радиуса вращения R = O’A’0. Для этого строим прямоугольный треугольник O’A’A’0, катет которого A’A’0 равен расстоянию от A” до h”.
- Проводим дугу окружности радиусом R до пересечения её с прямой O’A’ в точке A’1. Соединяем A’1 с точками 1′ и 2′. Искомый угол ϕ построен.
Задача № 5
По заданным в таблице координатам построить наглядное изображение и эпюр точки. Для каждой точки построить отдельный чертеж. Ось оу проводим под углом 45 0 к горизонтали и откладываем на ней размеры в 2 раза меньше заданного в таблице размера. При построении ортогональных проекций точек размеры откладываем в натуральную величину.
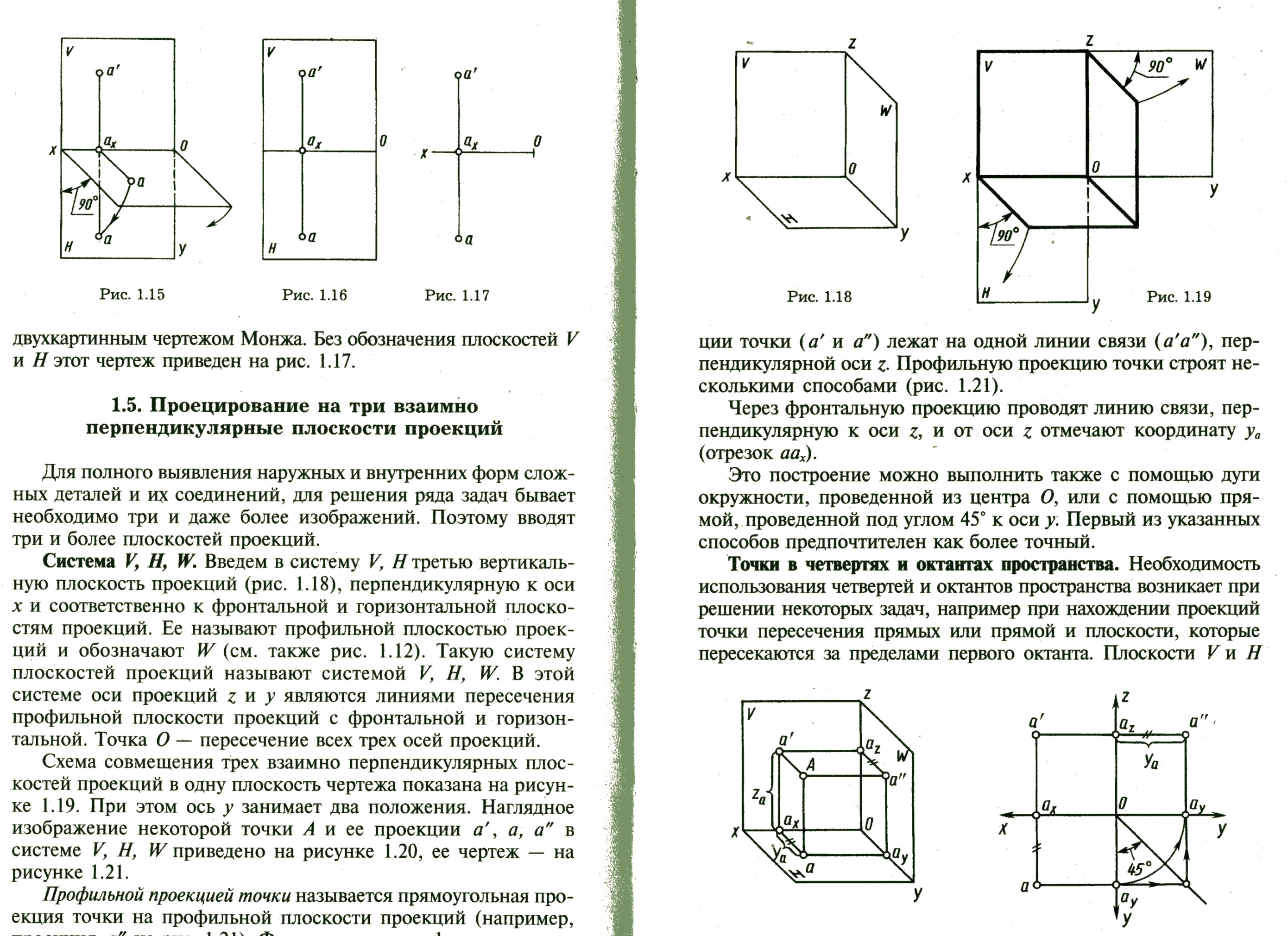
| 1. А | 2. В | 3. С | 4.Д | ||||||||||||
| № | х | у | z | № | х | у | z | № | х | у | z | № | х | у | z |
Задача № 6* и образец ее решения.
Дать наглядные изображения точек А, В, С, D Относительно плоскостей V и H. Точки заданы своими проекциями (рис. а).
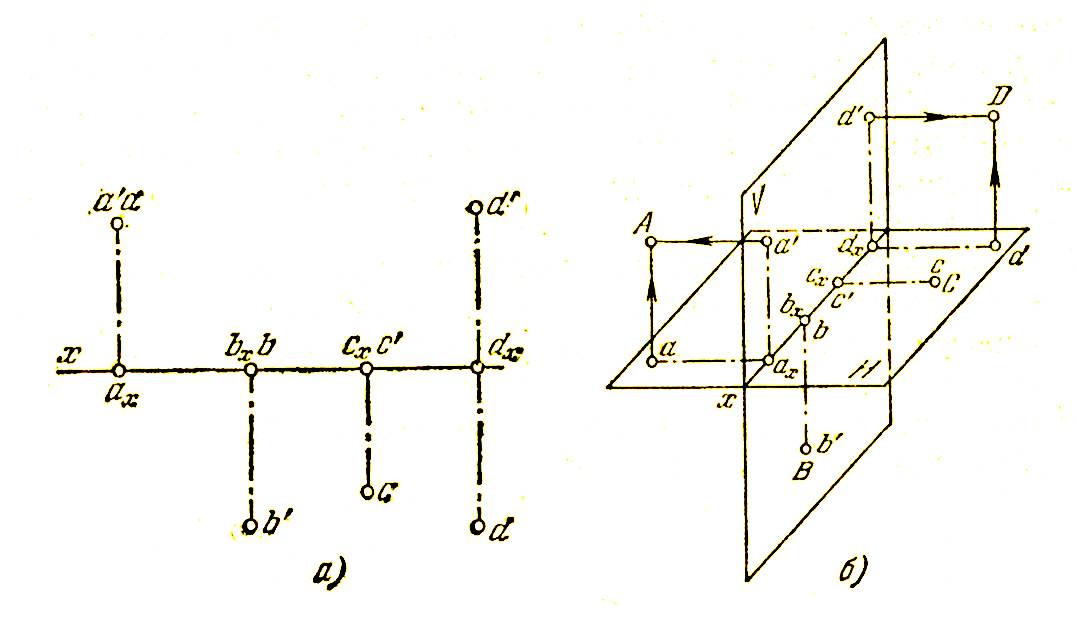
Решение: Точки ах, вх, сх, dх ( рис. б) выбираем на оси х произвольно. Так как точка А находится во второй четверти (аппликата точки положительна, ордината отрицательна), то отрезок аха, соответствующий значению ординаты откладываем влево от плоскости V . Отрезок аха‘, соответствующий значению аппликаты, откладываем вверх от плоскости Н.
Для построения точки D, находящейся в первой четверти (аппликата и ордината положительны), отрезок dxd откладываем влево от плоскости, а отрезок dxd’ – вверх от плоскости Н.
Положения точек А и D, получены на пересечении перпендикуляров, проведенных через точки а и d к плоскости Ни через точки а’ и d’ к плоскости V.
Точка В лежит в плоскости V, это следует из того, что проекция b лежит на оси х (ордината равна 0) следовательно на рис б, точка b совпадает с bх . Отрезок bхb’ соответствующий отрицательному значению аппликаты откладываем вниз от плоскости Н. Положение самой точки В совпадает с положением ее фронтальной проекции b’.
Точка С располагается на плоскости Н, это следует из того, что проекция с’ лежит (рис. а) на оси х (аппликата точки С равна 0) Поэтому и на рис. б схс’.
Так как для точки С ордината положительна, то соответствующей этой ординате отрезок схс откладывается вправо от плоскости V, положение самой точки совпадает с положением ее горизонтальной проекции с.
Задача № 7.Изобразить наглядно положения точек А,B,C,D и E, заданных своими проекциями на рисунке.

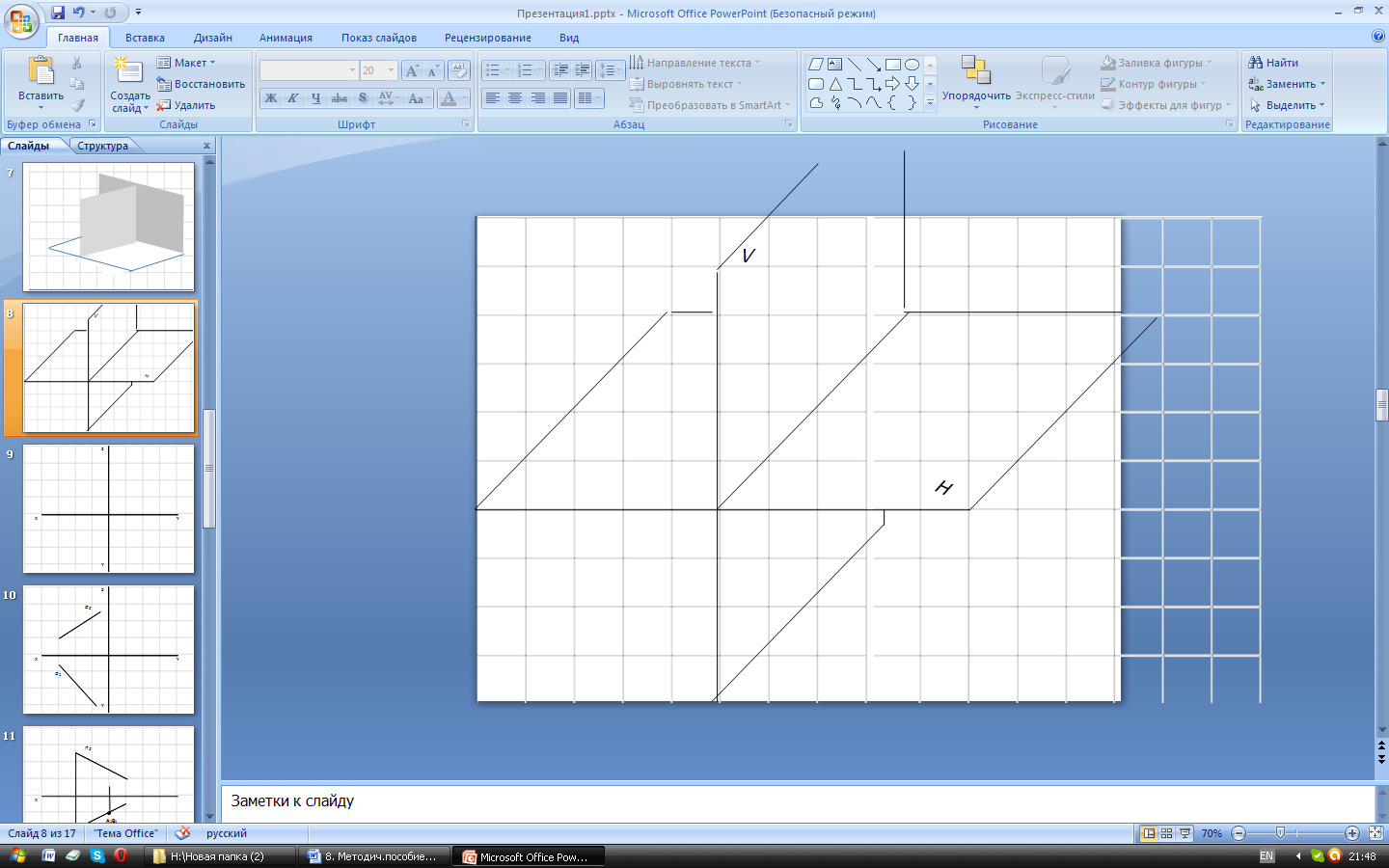
Задача № 8*.Построить проекции точек А и В по их координатам. Построить проекцию точки С, расположенной симметрично точке А относительно фронтальной плоскостей проекций. Изобразить наглядно положения этих точек относительно плоскостей V и Н.
| координаты точка | x | y |
| A | 13,5 | |
| B | 6,5 | -20 |
Решение.Намечаем ось х (рис.а) и на ней точку ах . Так кА точка А положительна, расположена в первой четверти (аппликата и ордината положительны), то проекция а’ находится над осью х на расстоянии 13,5.
Для построения точки В сначала задаемся (на оси х) произвольно точкой bх и откладываем вниз отрезок bх b равный значению ординаты 6,5 и отрезок bх b’, соответствующий отрицательному значению аппликаты (-20). Точка В находится в первой четверти.
Точка С должна быть расположена симметрично точке А относительно плоскости V. Следовательно ордината точки С равна -13,5, а аппликата равно 20. Точка сх совпадает с точкой ах, с’ – с а’, а горизонтальная проекция с находится над осью х на расстоянии 13,5.
Задача № 9.Построить проекции точек А, В, С по их координатам. Построить проекцию точки D ,расположенной симметрично точке С относительно оси х. Изобразить наглядно положения этих точек относительно плоскостей V и Н.
| координаты точка | x | y |
| A | -25 | |
| B | -20 | |
| С | -30 | -20 |
Задача № 10. Построить недостающие проекции точек А, В, С, D и их наглядное изображение в системе трех плоскостей проекций.
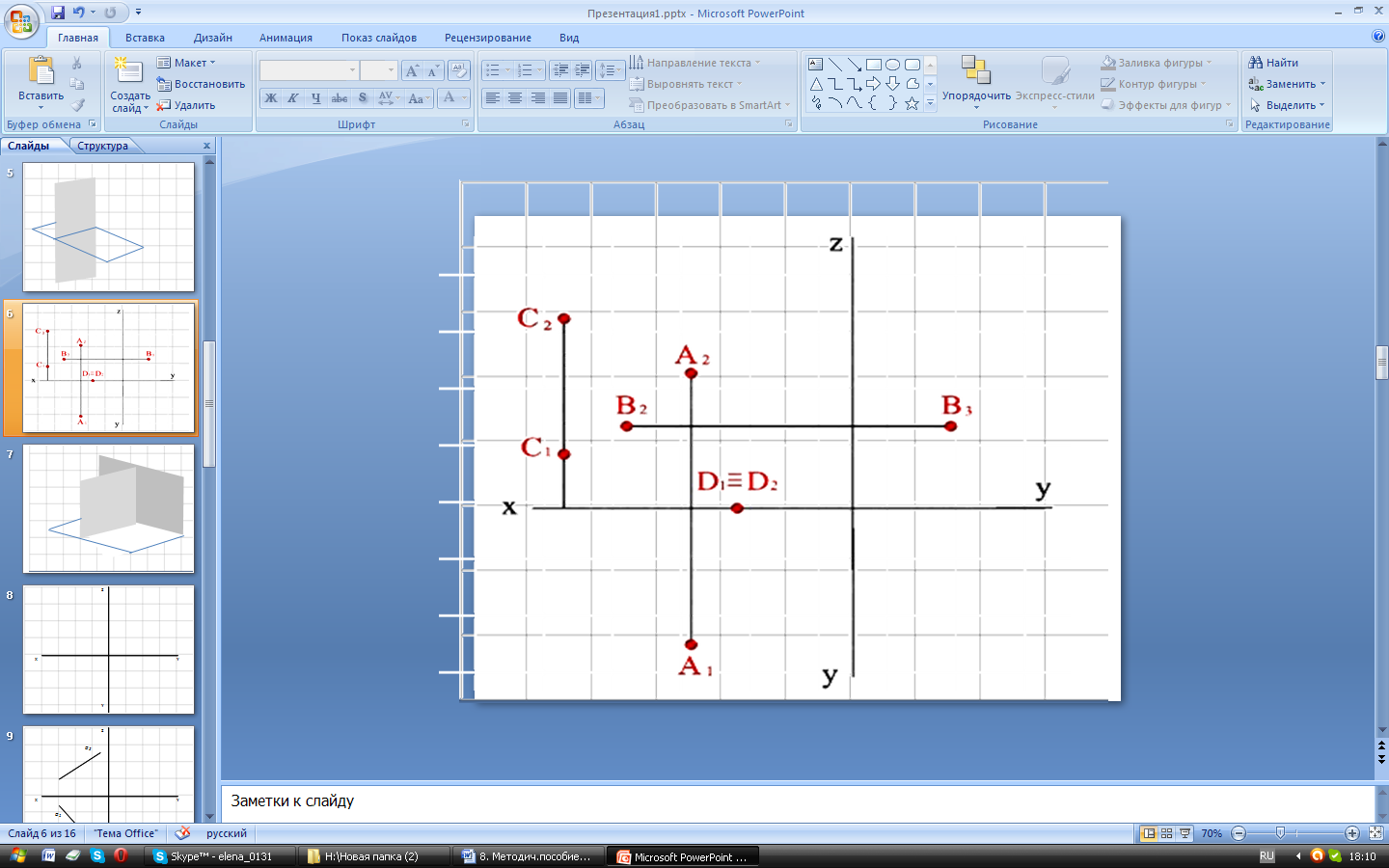

Тема 1.3. Проекции прямой линии. Взаимное положение прямых в пространстве.
| Задача № 11. По заданным фронтальной а2 и профильной а3 проекциям прямой построить горизонтальную проекцию а1 , прямой а |  |
| |
Задача № 12. По фронтальному N2 и профильному T3 следам прямой а построить её проекции. Определить через какие октанты она проходит. |
| Задача № 13. По горизонтальному M1 и профильному T3 следам прямой а построить её проекции. Определить через какие октанты она проходит. | 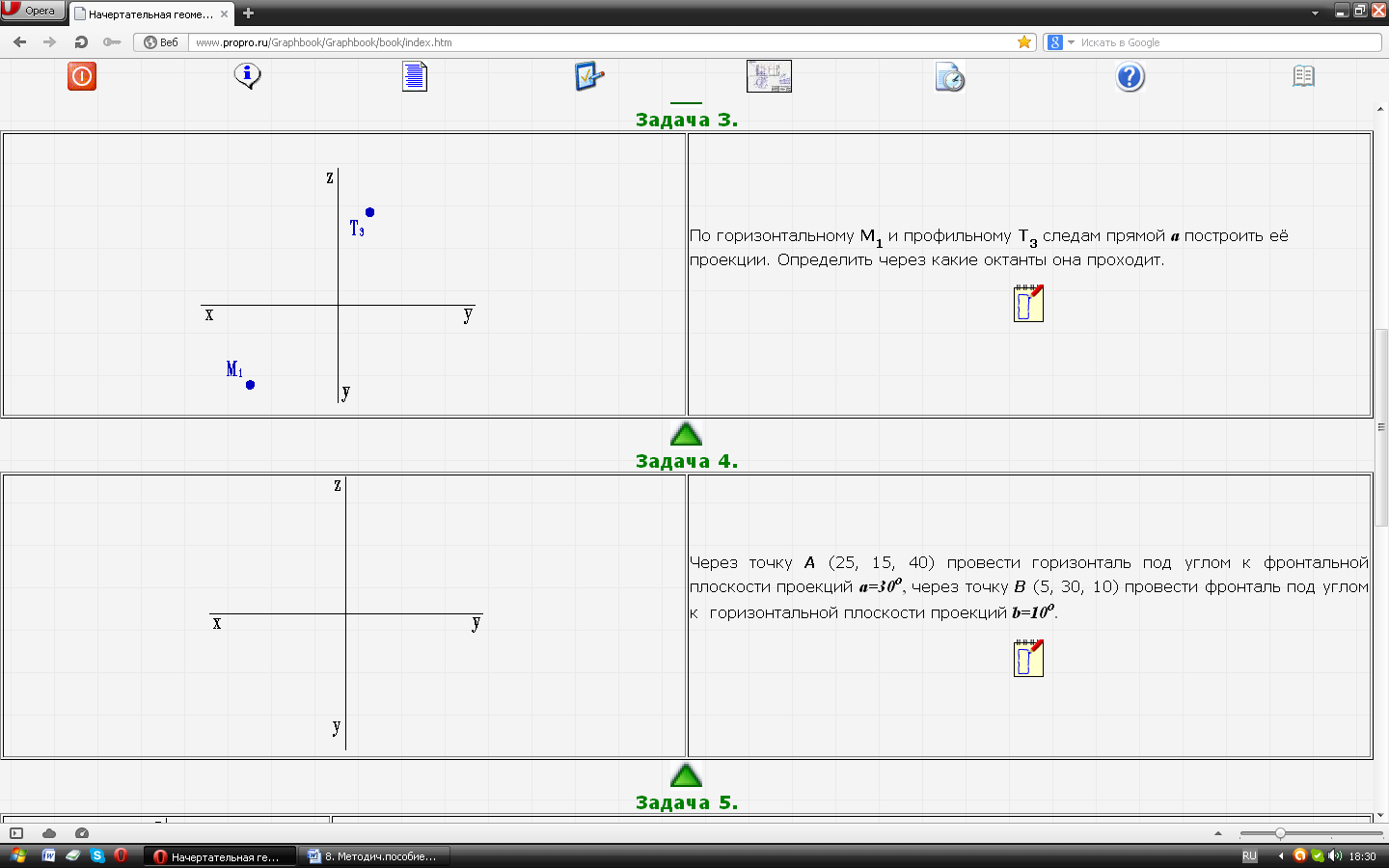 |
| Задача № 14. Через точку А (25, 15, 40) провести горизонталь под углом к фронтальной плоскости проекций a=30 o , через точку В (5, 30, 10) провести фронталь под углом к горизонтальной плоскости проекций b=10 o . | |
| |
|
| Задача № 15. Построить три проекции отрезка АВ прямой линии п по заданным координатам ее концов А(30,10,10) , В(10,25,40). Построить проекции точки С, делящей отрезок в отношении АС:СВ=1:2. | |
| |
|
| Задача № 16. Построить следы прямой линии заданной отрезком | 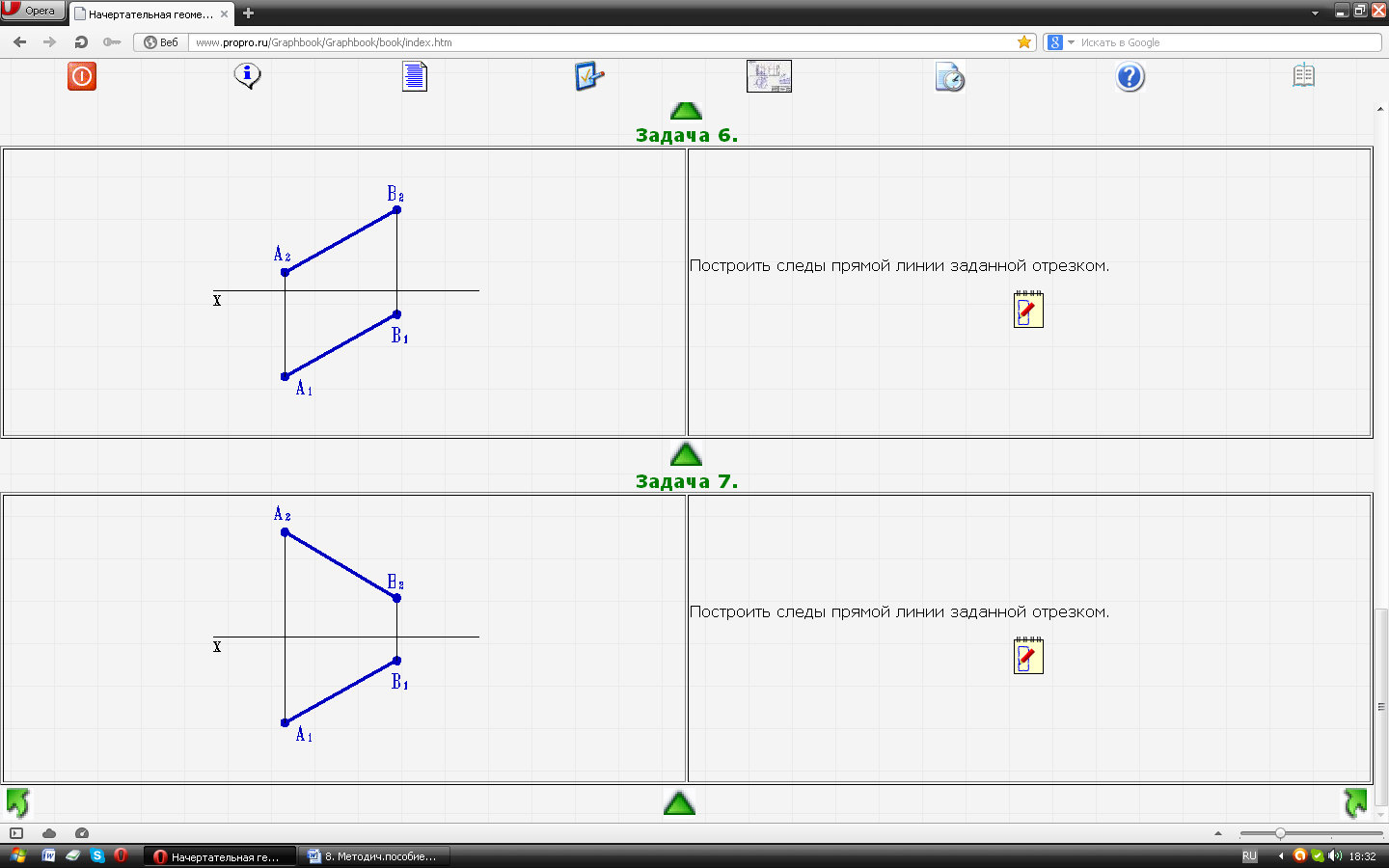 |
| |
Задача № 17. Построить следы прямой линии заданной отрезком |
| Взаимное расположение точки и прямой | |
| Задача № 18.Определить какая из предложенных на проекциях точек принадлежит прямой m. |  |
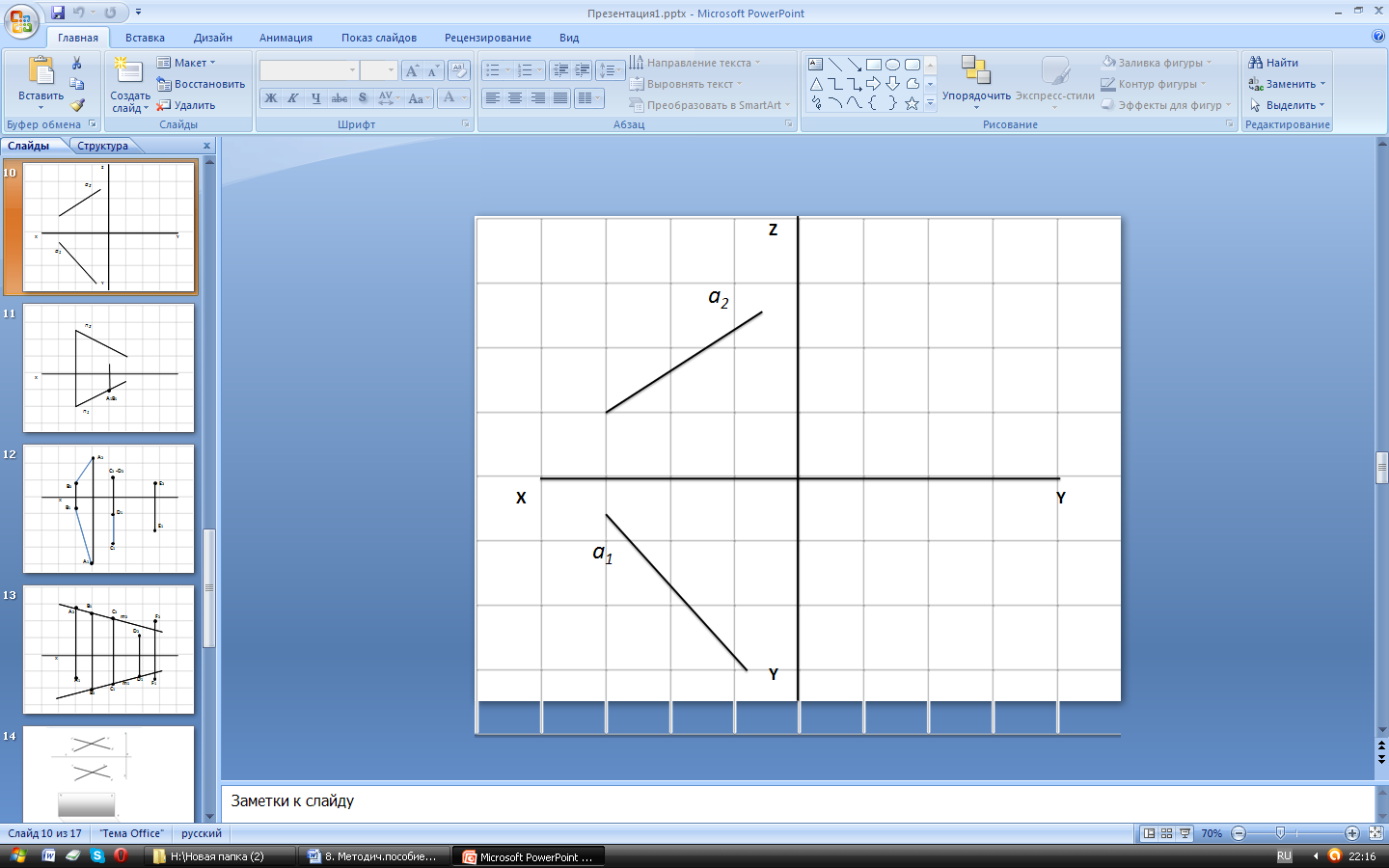 |
Задача № 19.Построить проекции точки А равноотстоящей от плоскостей П1 и П2 и принадлежащей прямой а заданной на эпюре. |
| Задача № 20.Построить недостающие проекции точек А и В, если известно, что точка А лежит на прямой п, а В на 10 мм выше точки А. |  |
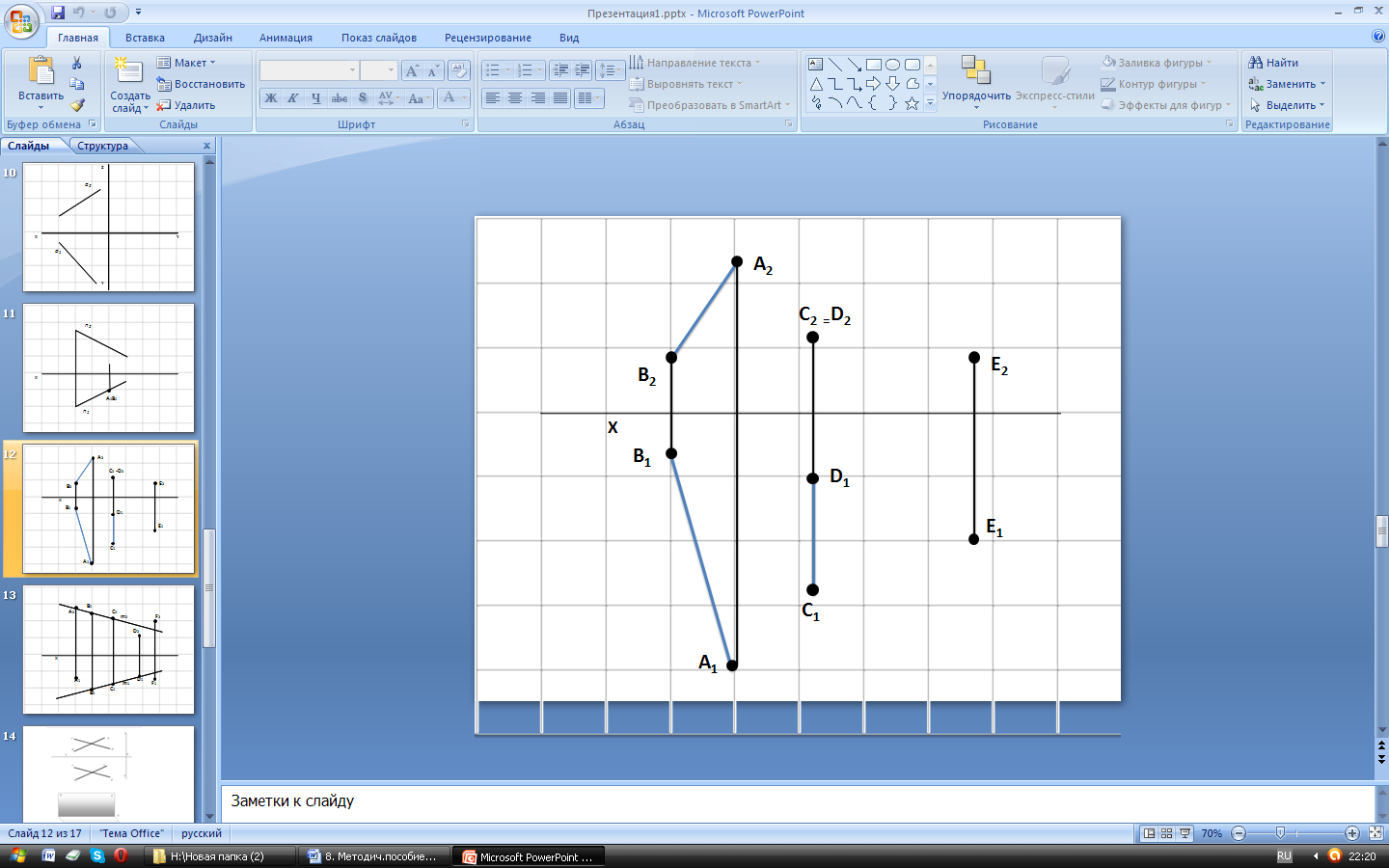 |
Взаимное расположение прямых Задача № 21.Через точку Е провести прямую, пересекающую прямые АВ и СD. |
Тема 1.4. Плоскость.
| Задача № 22.По координатам трех точек А(45,30,10), B(30,10,45) и С(5,25,5) построить проекции плоскости и её следы. | 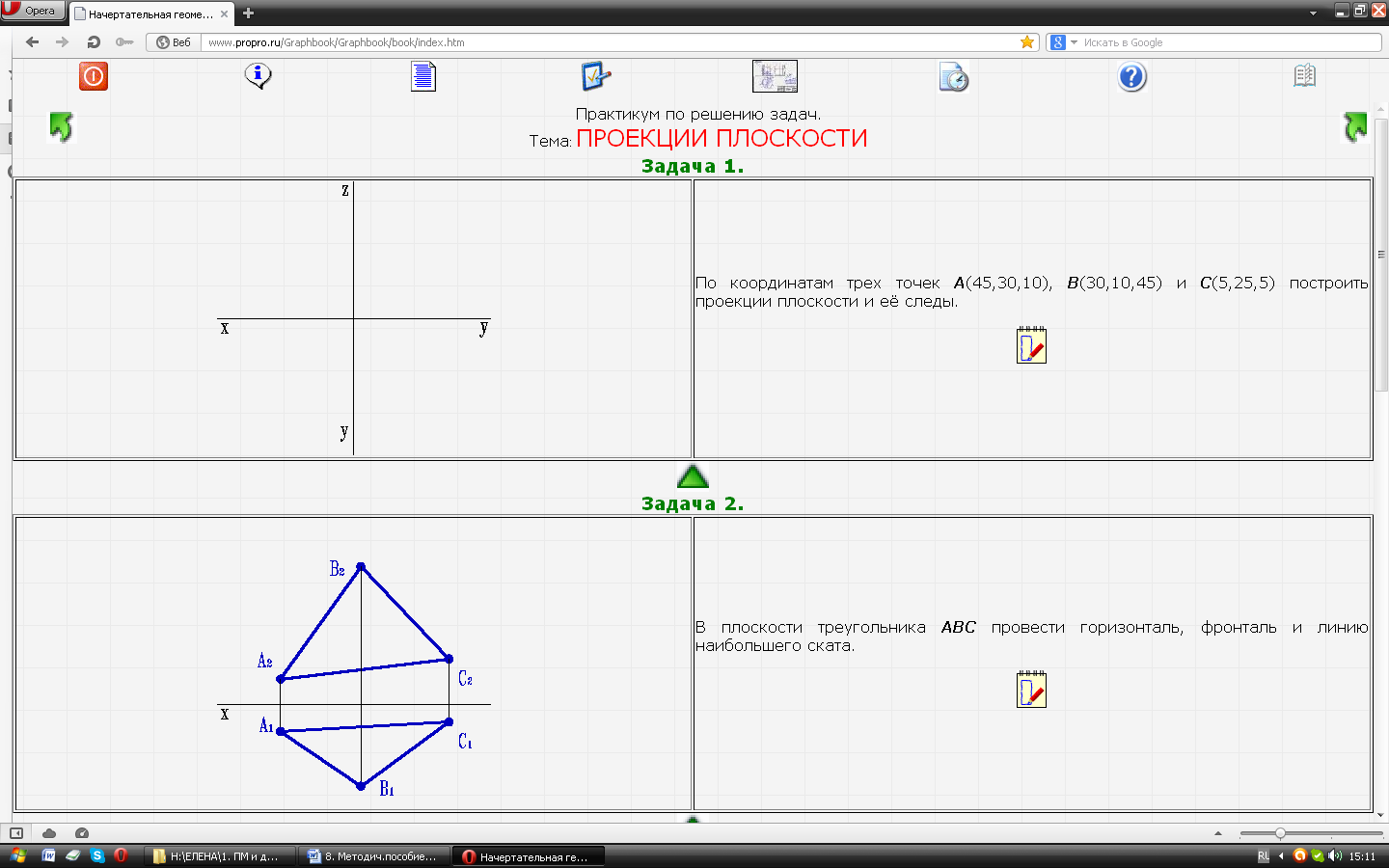 |
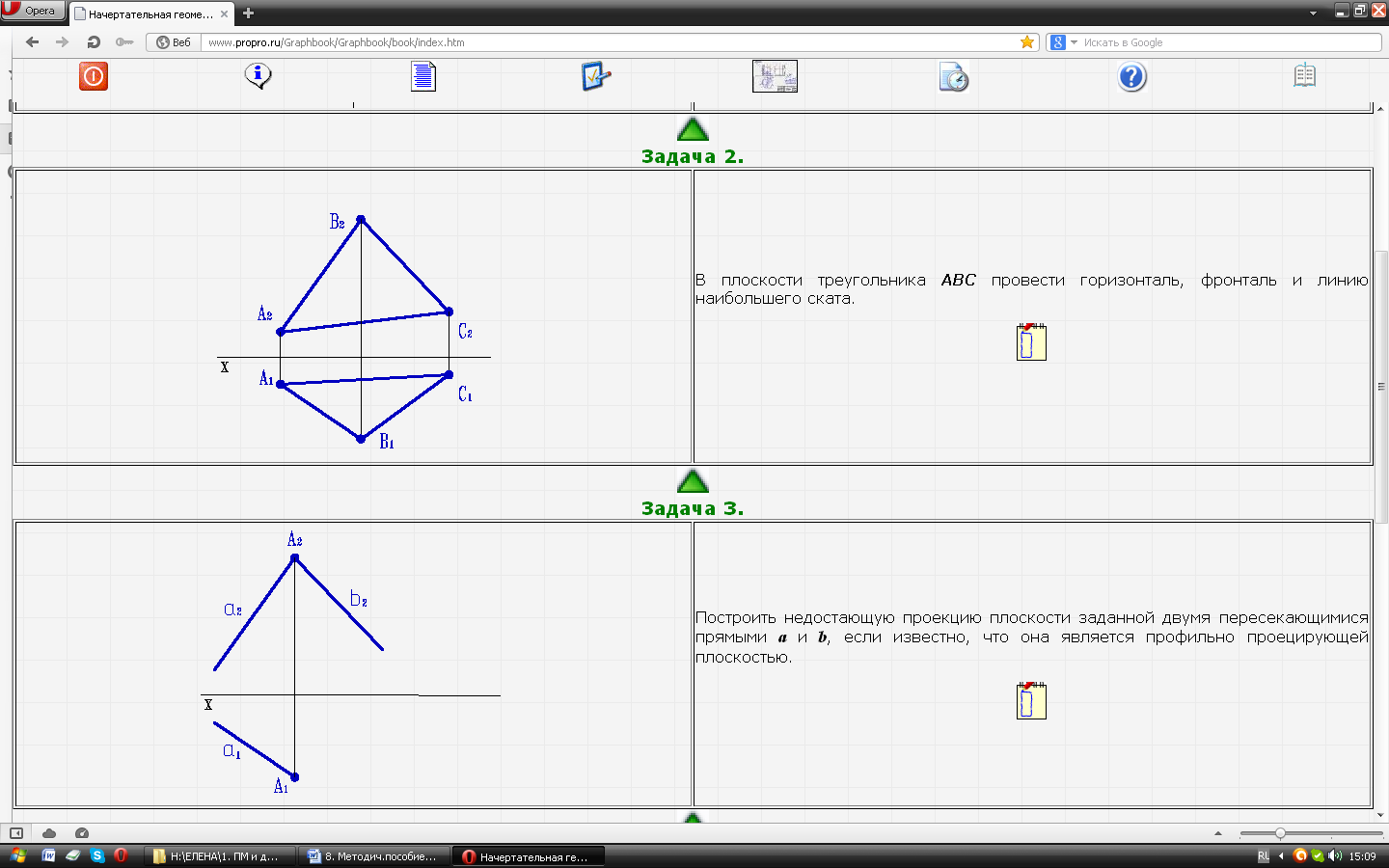 |
Задача № 23. В плоскости треугольника АВС провести горизонталь, фронталь и линию наибольшего ската. |
| Задача № 24.Построить недостающую проекцию плоскости заданной двумя пересекающимися прямыми a и b, если известно, что она является профильно проецирующей плоскостью. | |
Тема 1.5. Задание точки и прямой в плоскости.
Прямая и точка в плоскости. Главные линии плоскости. Пересечение прямой и плоскости. Определение видимости на чертеже.
| Задача № 25 Построить недостающую проекцию точки D принадлежащей плоскости АВС. | 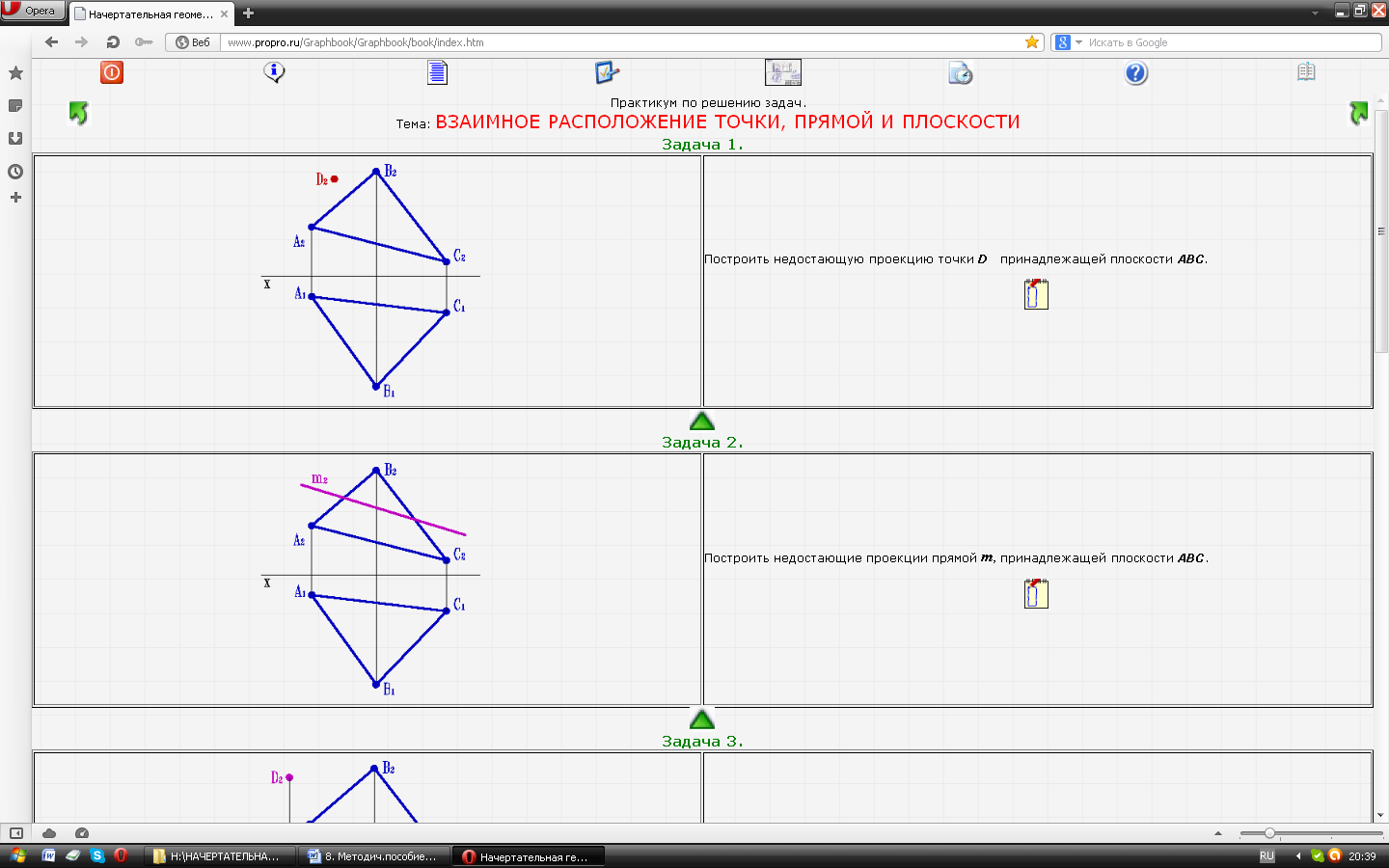 |
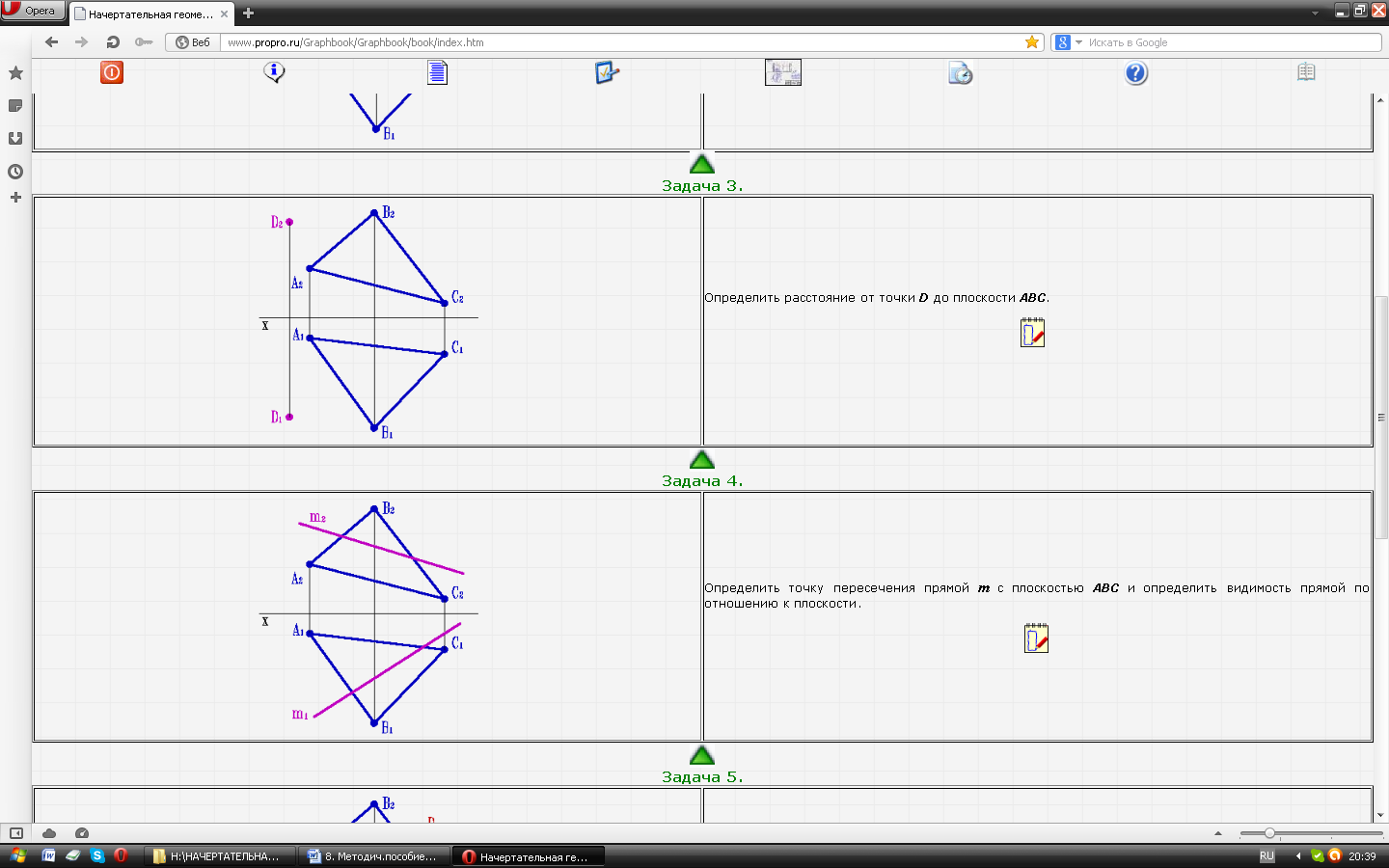 |
Задача № 26. Определить расстояние от точки D до плоскости АВС |
| |
Задача № 27. Построить недостающие проекции прямой m, принадлежащей плоскости АВС.. |
| Задача № 28 Определить точку пересечения прямой m с плоскостью АВС и определить видимость прямой по отношению к плоскости. | |
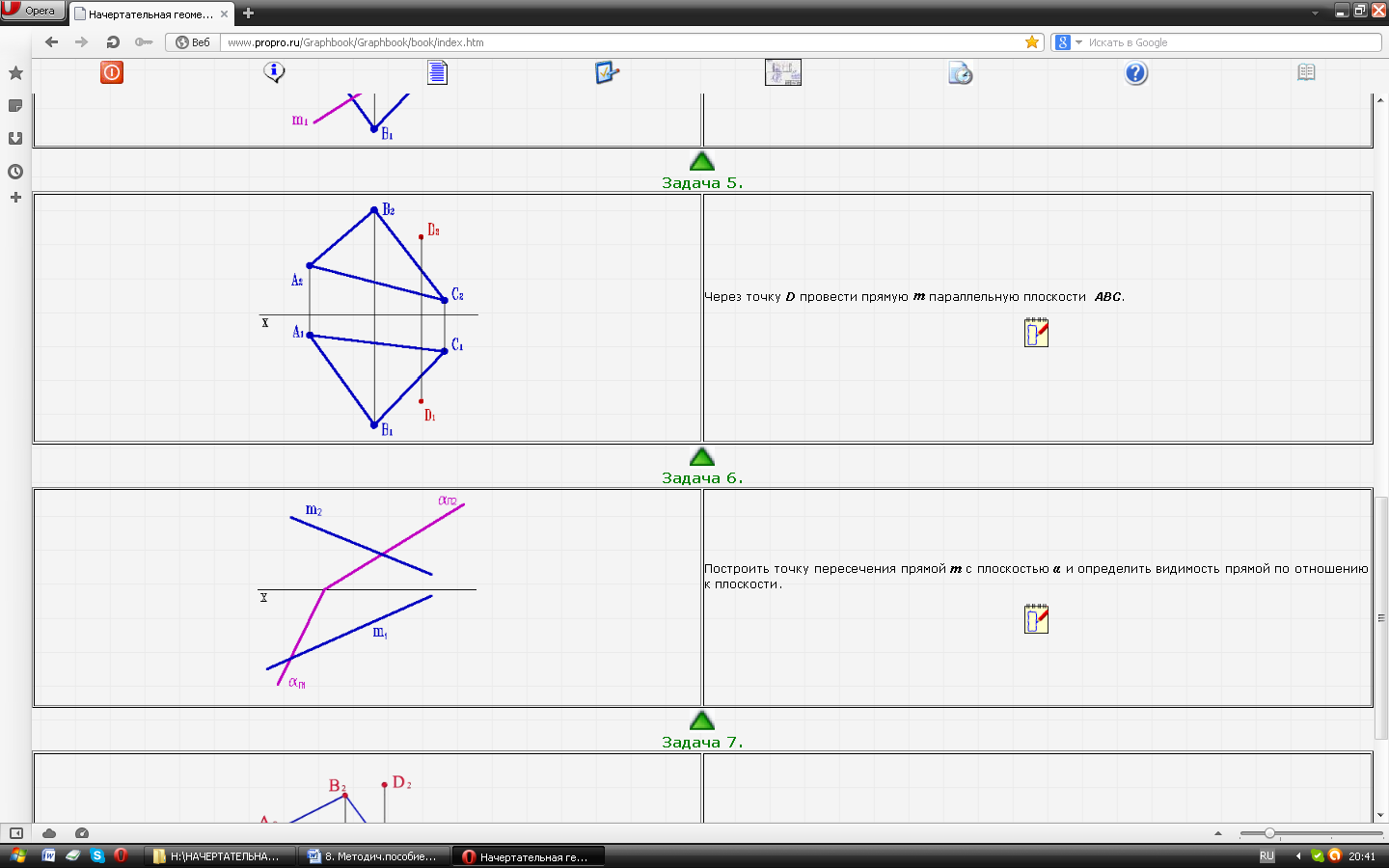 |
Задача № 29. Через точку D провести прямую параллельную плоскости АВС. |
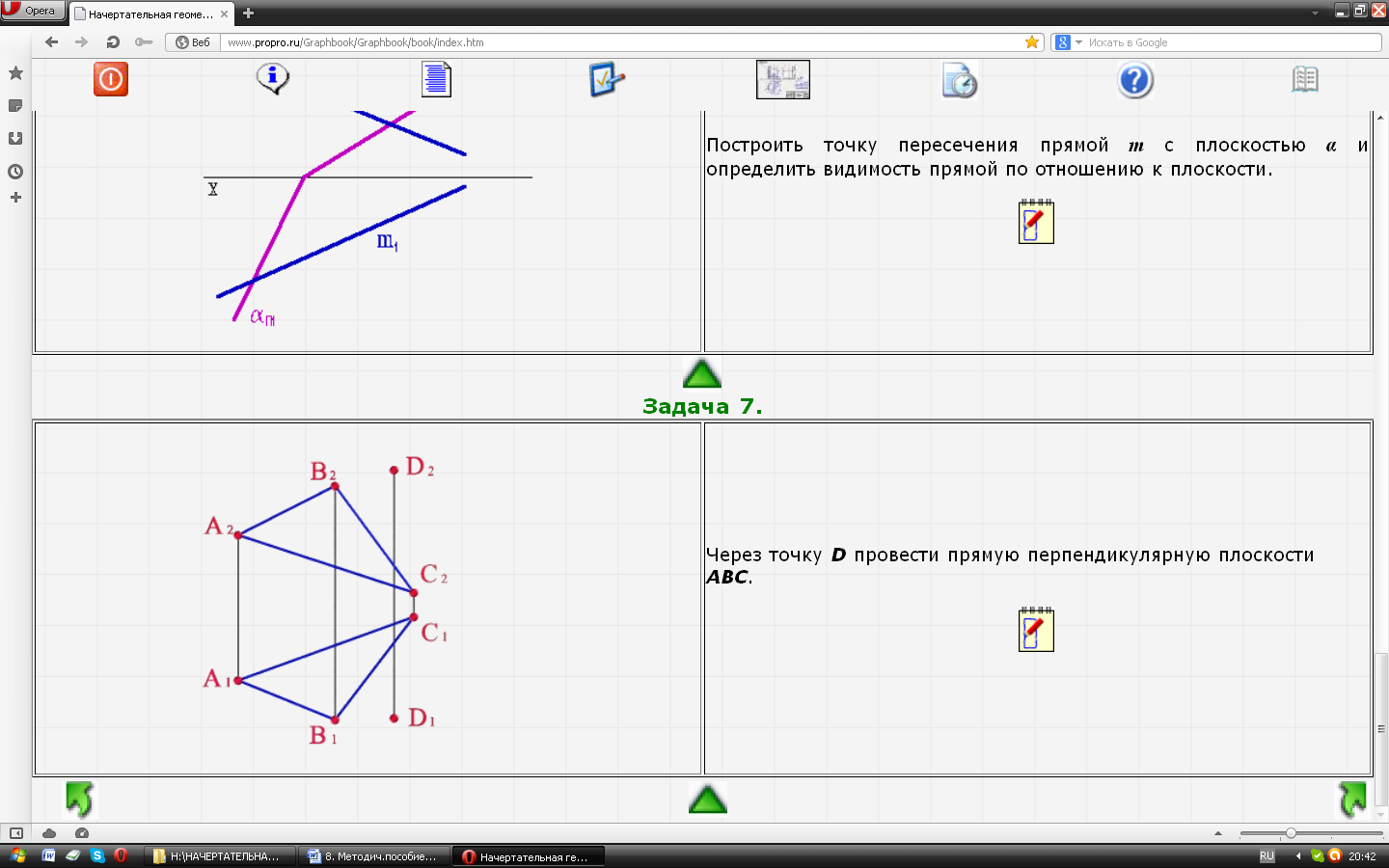 |
Задача № 30. Через точку D провести прямую перпендикулярную плоскости АВС. |
| Тема 1.6.Взаимное положение плоскостей. | |
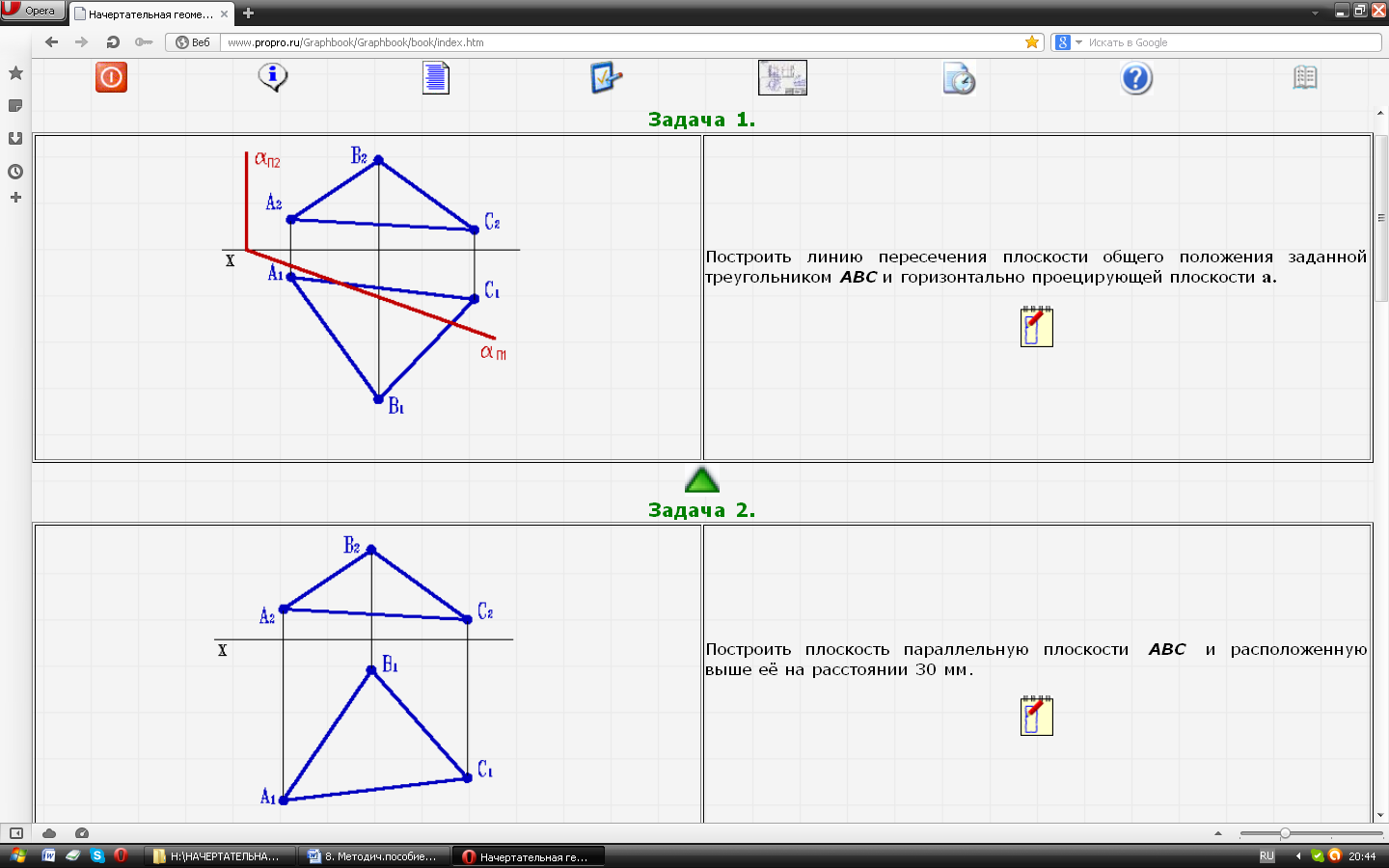 |
Задача № 31. Построить плоскость параллельную плоскости АВС и расположенную выше её на расстоянии 30 мм. |
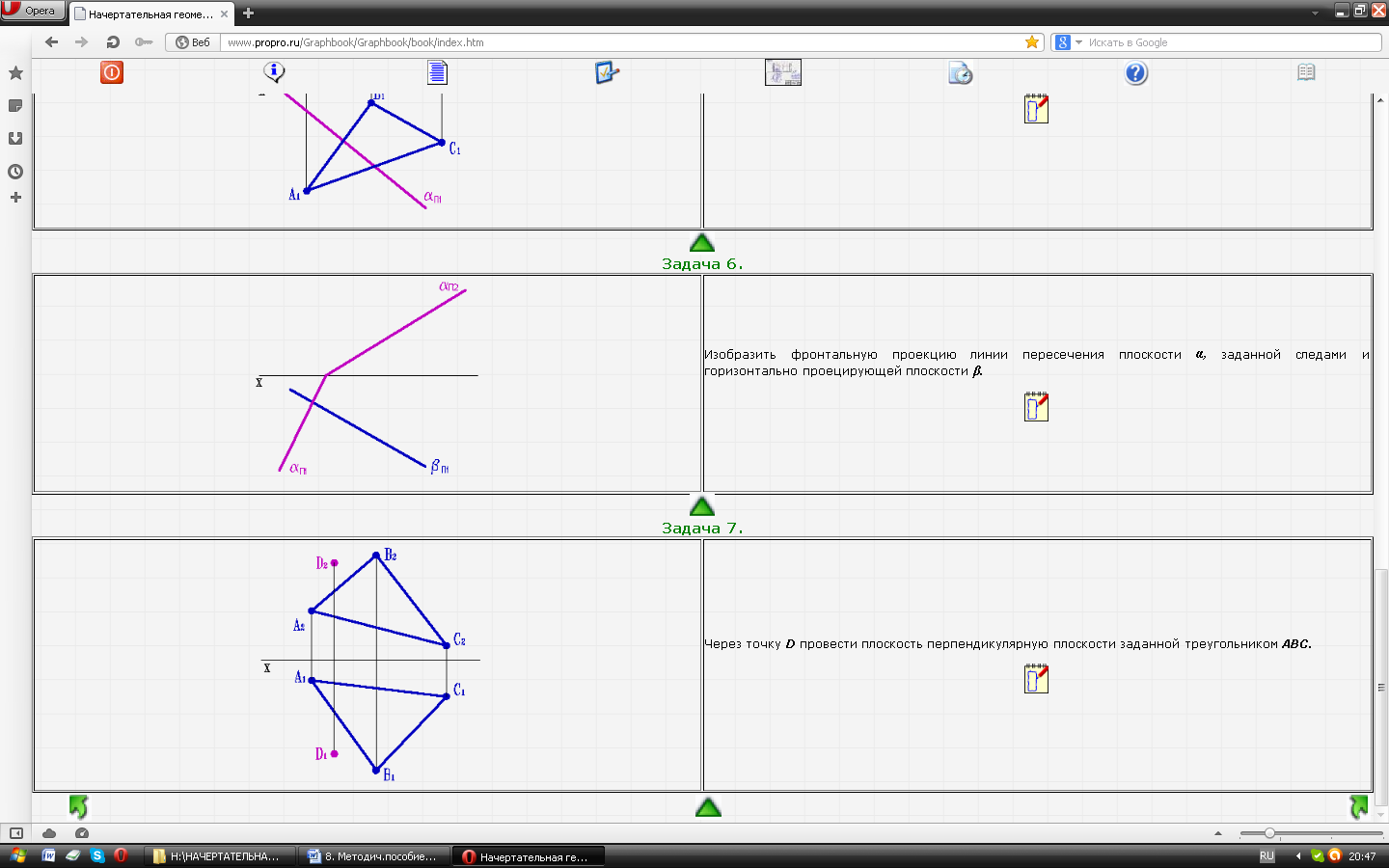 |
Задача № 32. Через точку D провести плоскость перпендикулярную плоскости заданной треугольником АВС. |
| Задача № 33. Построить линию пересечения плоскости АВС и плоскости заданной двумя параллельными прямыми п и т. Определить видимость. | 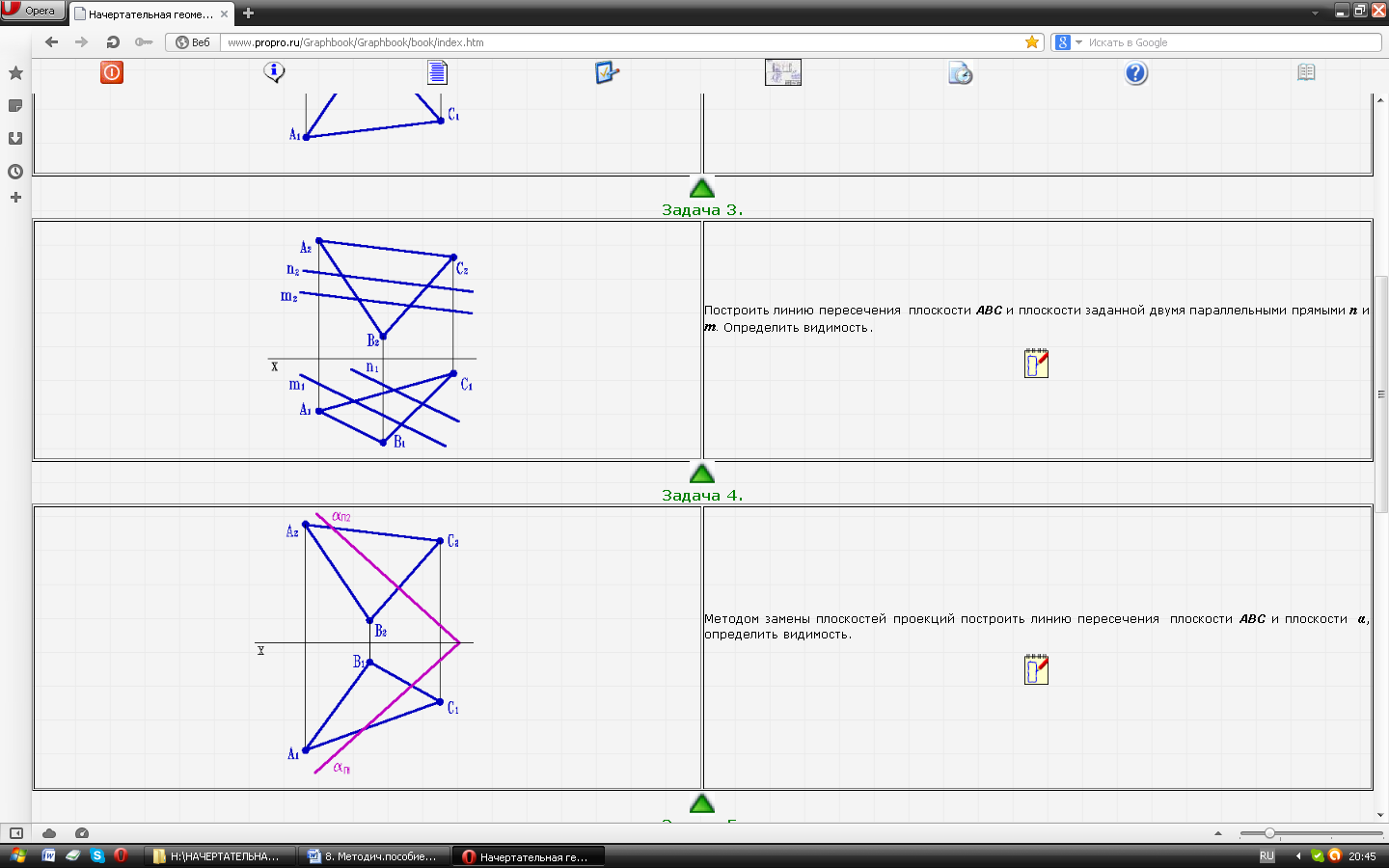 |
Тема 1.7.Способы преобразования проекционного чертежа.
Решение метрических задач в начертательной геометрии с примерами
Содержание:
К метрическим задачам относятся задачи на определение натуральной величины отрезков, расстояний углов, площадей плоских фигур.
Определение натуральной величины отрезка и углов наклона к плоскостям проекций методом прямоугольною треугольника Натуральная величина отрезка равна гипотенузе прямоугольного треугольника, одним катетом которого является проекция отрезка, а вторым – разность расстояний концов отрезка от той плоскости, на которой ведется построение. При этом угол между гипотенузой и катетом проекций является углом наклона отрезка к той плоскости, ряльной величины выполнено на горизонтальной проекции. Поэтому одним катетом прямоугольного треугольника, является горизонтальная проекция
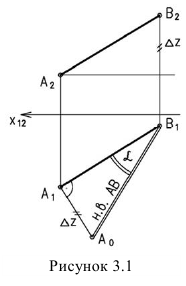
Если необходимо определить угол наклона отрезка АВ к плоскости  то построение прямоугольного треугольника ведется на фронтальной проекции.
то построение прямоугольного треугольника ведется на фронтальной проекции.
Решение метрических задач методами преобразовании проекций
Положении геометрических образов, при которых расстоянии и углы не искажаются на плоскостях проекций
Метрические характеристики объектов на чертежах не искажаются, если геометрические образы занимают частное положение относительно плоскостей проекций.
Приведем некоторые из них.
1. Прямая проецируется в натуральную величину, если она параллельна плоскости проекций (рисунок 3.2).
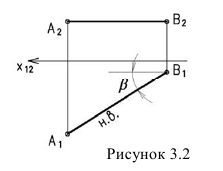
 – угол наклона к плоскости
– угол наклона к плоскости
2. Расстояние от точки до прямой проецируется в натуральную величину, если прямая проецирующая (рисунок 3.3).
3. Расстояние между параллельными прямыми проецируется в натуральную величину, если прямые проецирующие (рисунок 3.4).
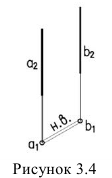
4. Расстояние между скрещивающимися прямыми проецируется в натуральную величину, если одна из прямых проецирующая (рисунок 3.5).
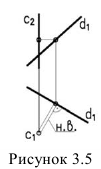
5. Угол между плоскостями (двугранный угол) проецируется в натуральную величину, если ребро угла проецирующее (рисунок 3.6).
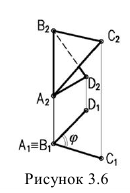
6. Угол наклона плоскости к плоскости проекций проецируется в натуральную величину, если плоскость проецирующая (рисунок 3.7) 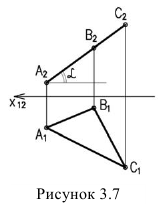
7. Расстояние от точки до плоскости проецируется в натуральную величину, если плоскость проецирующая (рисунок 3.8)
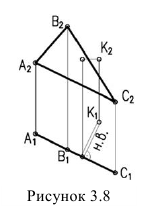
8. Любая плоская фигура проецируется в натуральную величину, если она параллельна плоскости проекций (рисунок 3.9а,б)
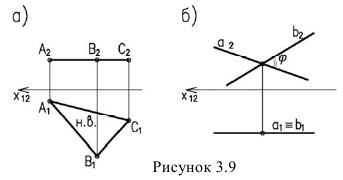
Таким образом, для решения метрических задач целесообразно данный объект привести в частное положение с тем, чтобы на одной из новых проекций получить более простое решение задачи.
Для такого перехода и служат способы преобразования проекций.
Существует несколько способов преобразовании проекций: способ вращения вокруг осей перпендикулярных плоскостям проекций, способ плоскопараллельного перемещения, способ замены плоскостей проекций и др.
Четыре основных задачи преобразовании проекций
Этими способами решаются четыре основные задачи:
- Задача 1. Прямую общего положения преобразуем в линию уровня (одно преобразование).
- Задача 2. Прямую общего положения преобразуем в проецирующую (два преобразования)
- Задача 3. Плоскость общего положения преобразуем в проецирующую (одно преобразование)
- Задача 4. Плоскость общего положения преобразуем в плоскость уровня (два преобразования)
Решение 1-ой и 2-ой задачи преобразовании проекций методом вращении, плоскопараллельного перемещении и замены плоскостей проекций
Способ вращения
Способ вращения заключается в том, что геометрические образы вращаются вокруг осей перпендикулярных плоскостям проекций до занятия ими какого-либо частного положения относительно плоскостей проекций. При этом одна проекция точки перемещается по окружности, вторая – но прямой параллельной оси проекций.
На рисунке 3.10 вокруг оси вращаем отрезок ЛВ до положения параллельного плоскости
вращаем отрезок ЛВ до положения параллельного плоскости (1 задача). Далее вращением вокруг оси
(1 задача). Далее вращением вокруг оси полученный отрезок до положения перпендикулярного плоскости
полученный отрезок до положения перпендикулярного плоскости 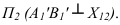 На
На  отрезок с проецируется в точку
отрезок с проецируется в точку 
Способ плоскопараллельного перемещения
Способ плоскопараллельного перемещения является разновидностью способа вращения (вращение без закрепленных осей), т.е. положение объекта можно преобразовывать путем перемещения его параллельно одной плоскости проекций, одновременно изменяя его положение относительно другой плоскости проекций до занятия им какого-либо частного положения.
На рисунке 3.11 сначала АВ переводим из общего положения в положение горизонтальное. При этом  должно быть равно по величина
должно быть равно по величина  находим в пересечении вертикальных линий связи и линий
находим в пересечении вертикальных линий связи и линий  параллельных оси
параллельных оси  (1 задача). Далее отрезок
(1 задача). Далее отрезок  перемещаем до положения перпендикулярного оси
перемещаем до положения перпендикулярного оси  При этом
При этом  На фронтальной проекции отрезок с проецируется в точку
На фронтальной проекции отрезок с проецируется в точку  (2 задача).
(2 задача).
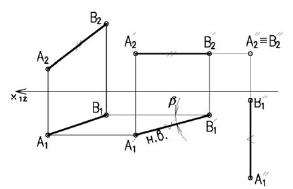
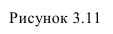
Способ замены плоскостей проекций
Сущность способа замены плоскостей проекций заключается в том, что старая система плоскостей проекций заменяется на новую, с таким расчетом, чтобы относительно новой системы плоскостей, геометрический образ занял какое-то частное положение. При этом нужно помнить, что линии связи будут перпендикулярны относительно новой оси проекций и расстояния от новой оси проекций до новой проекции точки равно расстоянию от старой проекции точки до старой оси.
На рисунке 3.12 произведена первая замена плоскость  заменена на новую фронтальную плоскость
заменена на новую фронтальную плоскость  параллельную прямой АВ. При этом новая ось
параллельную прямой АВ. При этом новая ось  проводится параллельно проекции
проводится параллельно проекции  Линии связи проводятся перпендикулярно оси
Линии связи проводятся перпендикулярно оси  и на них от
и на них от  откладываются координаты z точек А и В (1 задача).
откладываются координаты z точек А и В (1 задача).
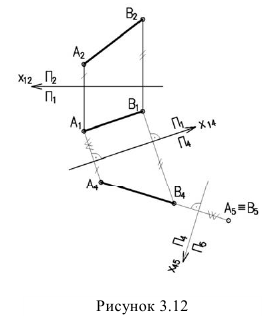
Далее прямую АВ преобразуем в проецирующую. Для этого проводим новую ось  перпендикулярно проекции
перпендикулярно проекции . Т.к.
. Т.к.  параллельна оси
параллельна оси  , расстояние до проекций
, расстояние до проекций  будет одинаковое и прямая спроецируется в точку
будет одинаковое и прямая спроецируется в точку  (2 задача)
(2 задача)
Решение 3-ой и 4-ой задачи преобразовании проекций методом плоскопараллельного перемещения и замены плоскостей проекций
Так как метод вращения является более громоздким, рассмотрим решение 3-ей и 4-ой задачи преобразования методом плоскопараллельного перемещения и методом замены плоскостей проекций.
Способ плоскопараллельного перемещения
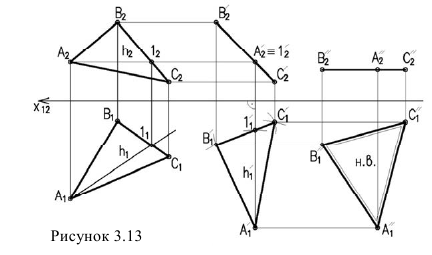
Для того чтобы плоскость из общего положения перевести в проецирующее, нужно иметь ввиду, что при этом ее горизонталь или фронталь должна быть перпендикулярна плоскости проекций. Поэтому на рисунке 3.13 проведена горизонталь  Далее
Далее  располагаем перпендикулярно оси
располагаем перпендикулярно оси  Откладываем на ней отрезок
Откладываем на ней отрезок  и циркулем строим треугольник
и циркулем строим треугольник  равный по величине
равный по величине  На фронтальной проекции треугольник проецируется в линию (3 задача).
На фронтальной проекции треугольник проецируется в линию (3 задача).
Чтобы плоскость треугольника перевести в положение плоскости уровня, достаточно полученную фронтальную проекцию  расположить параллельно оси
расположить параллельно оси  при этом на горизонтальной проекции треугольник проецируется в натуральную величину (4-я задача)
при этом на горизонтальной проекции треугольник проецируется в натуральную величину (4-я задача)
Способ замены плоскостей проекций
При решении задачи методом замены (рисунок 3.14) новую ось  проводим перпендикулярно горизонтали
проводим перпендикулярно горизонтали  тогда на новую фронтальную плоскость
тогда на новую фронтальную плоскость  треугольник спроецируется в линию, т.е. станет перпендикулярным (3-я задача). Чтобы плоскость перевести в положение плоскости уровня, необходимо новую ось
треугольник спроецируется в линию, т.е. станет перпендикулярным (3-я задача). Чтобы плоскость перевести в положение плоскости уровня, необходимо новую ось  провести параллельно плоскости
провести параллельно плоскости  На новую плоскость
На новую плоскость  треугольник спроецируется в натуральную величину.
треугольник спроецируется в натуральную величину.
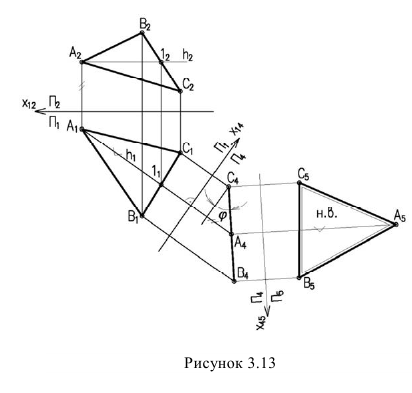
Для того, чтобы методами преобразования решить любую метрическую задачу, необходимо определить какую из четырех основных задач преобразования необходимо решать в каждом конкретном случае.
Метрические задачи
Метрические задачи – это задачи на определение линейных или угловых размеров геометрических объектов, а также расстояний и углов между ними.
Главным вопросом метрических задач является вопрос о построении перпендикуляра к прямой или плоскости. Построение взаимно перпендикулярных прямых было рассмотрено ранее.
Из элементарной геометрии известно, что прямая перпендикулярна к плоскости, если она перпендикулярна двум пересекающимся прямым, принадлежащим этой плоскости. В качестве этих пересекающихся прямых наиболее целесообразно использовать горизонталь и фронталь плоскости. Это объясняется тем, что только в этом случае прямой угол будет проецироваться в натуральную величину на соответствующие плоскости проекций. На рисунке 5.1 приведен пространственный чертеж, на котором из плоскости а (из точки А) восстановлен перпендикуляр АВ. Из приведенного изображения можно выяснить методику построения проекций перпендикуляра к плоскости: горизонтальная проекция перпендикуляра к плоскости проводится перпендикулярно горизонтальной проекции горизонтали или горизонтальному следу плоскости, а фронтальная проекция перпендикуляра проводится перпендикулярно фронтальной проекции фронтали или фронтальному следу плоскости. Таким образом, необходимо выполнить следующий алгоритм проведения проекций перпендикуляра к плоскости:

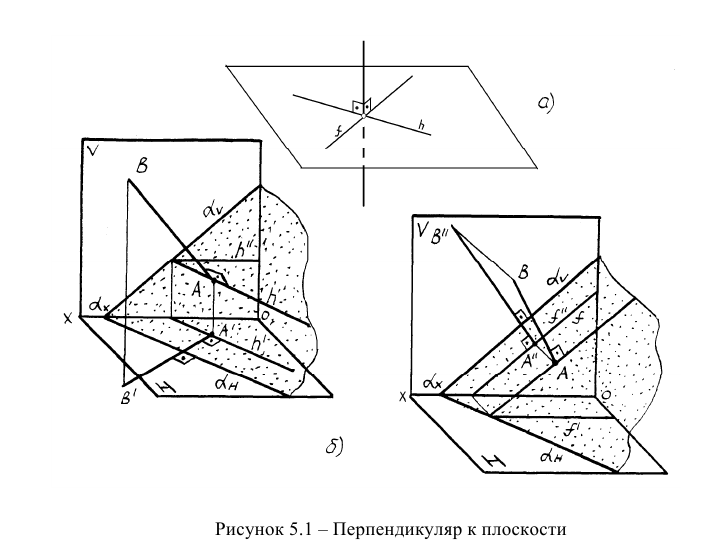
Построение перпендикуляра к плоскость и восстановление перпендикуляра из плоскости называется прямой задачей, а построение плоскости, перпендикулярной к прямой – обратной задачей. Обе задачи решаются по одному и тому же вышеописанному алгоритму. При этом плоскость, перпендикулярную заданной прямой, можно задать следами или пересекающимися горизонталью и фронталью.
На рисунке 5.2 показано решение прямой (а) и обратной (б) задач. В прямой задаче из точки A треугольника AВС восстановлен перпендикуляр, в обратной задаче через точку К проведена плоскость, перпендикулярная прямой АВ. Плоскость задана пересекающимися горизонталью и фронталью.
Здесь же приведены примеры прямой и обратной задач, если плоскость задана следами. В прямой задаче (в) из точки Л построен перпендикуляр на плоскость, в обратной (г) – через точку К проведена плоскость перпендикулярно прямой АВ. 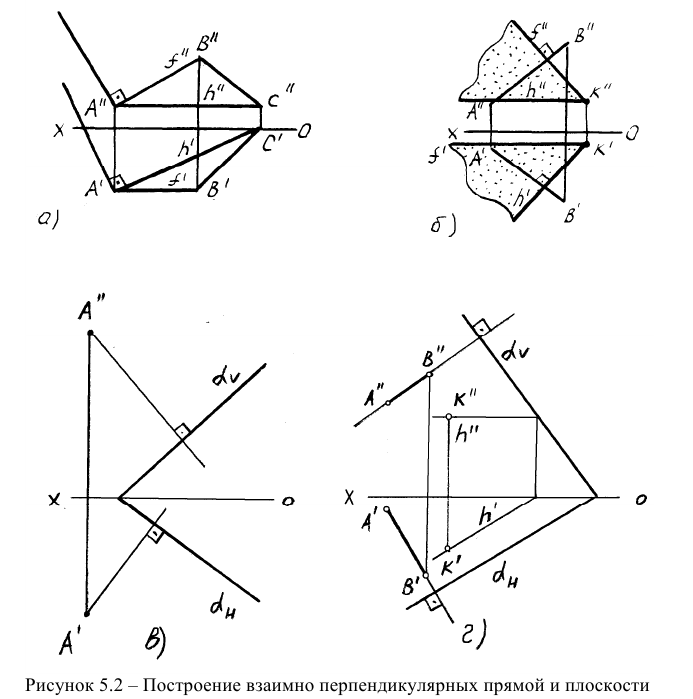
Определение расстояний между геометрическими объектами
Среди этих задач можно выделить следующие задачи: расстояние от точки до плоскости, расстояние от точки до прямой, расстояние между двумя параллельными прямыми, расстояние между двумя скрещивающимися прямыми, расстояние между двумя параллельными плоскостями и другие. В общем случае все задачи сводятся к определению расстояний между двумя точками.
Чтобы определить расстояние от точки до плоскости, необходимо выполнить ряд логических действий:
- Из точки опустить перпендикуляр на заданную плоскость;
- Найти точку встречи перпендикуляра с плоскостью;
- Определить НВ расстояния между заданной и найденной точками.
Задача на определение расстояния от точки до прямой решается по следующему плану:
- Через точку к провести плоскость, перпендикулярную заданной прямой;
- Найти точку встречи М заданной прямой с проведенной плоскостью;
- Соединить полученные точки (это будет перпендикуляр из точки на прямую);
- Определить НВ перпендикуляра.
Пространственная модель решения второй задачи представлена на рисунке 5.3. Рассмотренная задача относится также к задачам на перпендикулярность двух прямых.
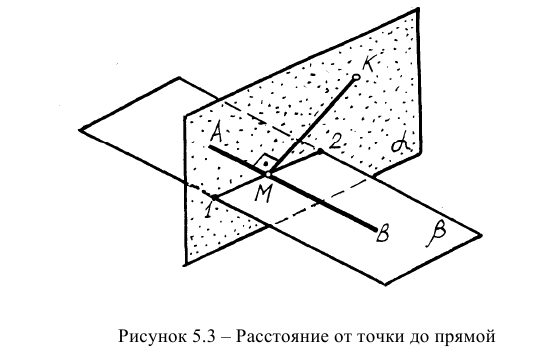
Другие упомянутые задачи на определение расстояний легче решаются методами преобразования эпюра, которые будут рассмотрены в последующих разделах.
Перпендикулярность плоскостей
Плоскость перпендикулярна другой плоскости, если она содержит прямую, перпендикулярную другой плоскости (рисунок 5.4а). Таким образом, для того, чтобы провести плоскость, перпендикулярную другой, необходимо сначала провести перпендикуляр к заданной плоскости, а затем через него провести искомую плоскость. На рисунке 5.46 представлена задача: через точку К провести плоскость, перпендикулярную плоскости треугольника AВС. Искомая плоскость задана двумя пересекающимися прямыми, одна из которых перпендикулярна заданной плоскости.
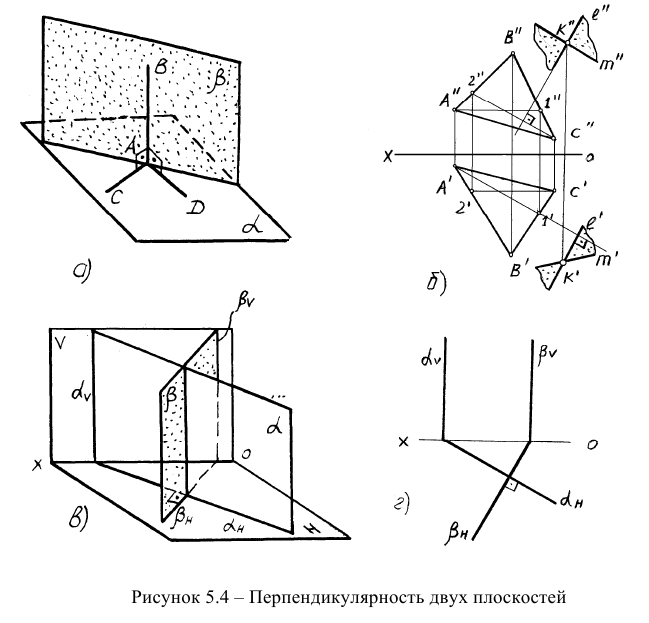
Если две плоскости являются одноименными плоскостями частного положения (например, горизонтально- или фронтально-проецирующими), то при перпендикулярности плоскостей их собирательные следы будут перпендикулярны друг другу (рисунок 5.4в,г).
Если плоскости являются плоскостями общего положения, то при их перпендикулярности одноименные следы не будут взаимно перпендикулярны. Другими словами, перпендикулярность одноименных следов плоскостей общего положения не является достаточным условием для перпендикулярности самих плоскостей.
Определение углов между прямой и плоскостью и между двумя плоскостями
Определение углов между геометрическими объектами является трудоемкой задачей, если её решать традиционными геометрическими способами. Так, например, задачу на определение угла между прямой и плоскостью (рисунок 5.5) можно решить способом, алгоритм которого содержит следующие операции:
- Определить точку встречи прямой АВ с плоскостью а;
- Из точки В построить перпендикуляр на плоскость;
- Найти точку встречи перпендикуляра с плоскостью;
- Точки К и N соединить и определить НВ угла BKN.
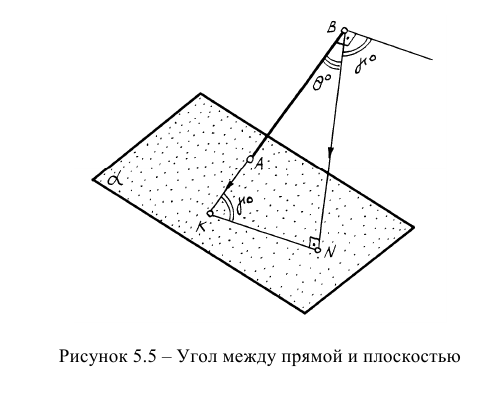
Однако задача может быть значительно упрощена, если использовать способ решения задачи с помощью дополнительного угла. Дополнительным углом назовем угол между заданной прямой АВ и перпендикуляром BN, обозначенный через  Из приведенного рисунка видно, что, если из точки В прямой построить на плоскость перпендикуляр, определить НВ дополнительного угла
Из приведенного рисунка видно, что, если из точки В прямой построить на плоскость перпендикуляр, определить НВ дополнительного угла  то искомый угол определится по формуле:
то искомый угол определится по формуле:
которую можно решить графически, достроив угол  до 90°.
до 90°.
То же самое можно сказать о задаче на определение двугранного угла, то есть угла между двумя плоскостями (рисунок 5.66). Первый способ (геометрический) достаточно трудоемок. Он заключается в пересечении угла вспомогательной плоскостью а, перпендикулярной ребру АВ, построении линий пересечения KN и KL и определении натуральной величины угла NKL.
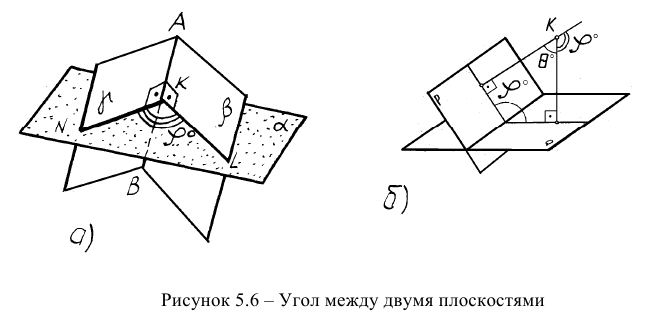
С помощью дополнительного угла задача решается следующим образом. В растворе двугранного угла (рисунок 5.6в) берут любую точку К и строят из неё перпендикуляры на обе плоскости двугранного угла, которые образуют дополнительный угол  Далее определяют НВ дополнительного угла и дополняют его (графически) до 180 градусов, исходя из формулы:
Далее определяют НВ дополнительного угла и дополняют его (графически) до 180 градусов, исходя из формулы:
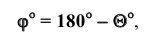
Дополненный угол будет искомым.
Натуральную величину дополнительного угла  в обеих задачах наиболее целесообразно определять методом вращения вокруг горизонтали или фронтали, который будет изложен в последующих темах.
в обеих задачах наиболее целесообразно определять методом вращения вокруг горизонтали или фронтали, который будет изложен в последующих темах.
Пример: Из любой вершины треугольника АВС восстановить перпендикуляр длиной 40 мм.
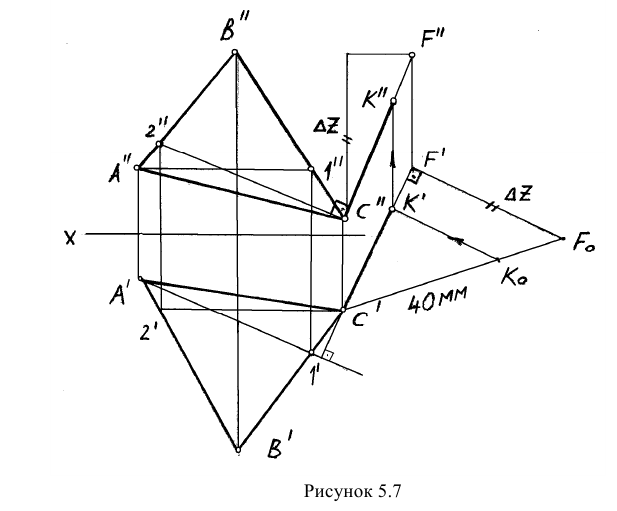
Решение: Сначала необходимо в плоскости треугольника АВС провести горизонталь и фронталь для того, чтобы построить проекции восстановленного перпендикуляра. Далее из точки С проводим проекции перпендикуляра согласно рассмотренному выше алгоритму о перпендикуляре к плоскости. Для того, чтобы отложить 40 мм, необходимо определить НВ ограниченного отрезка перпендикуляра CF (точку F берем произвольно). НВ отрезка CF определяем методом прямоугольного треугольника на горизонтальной проекции CF. Полученную точку К возвращаем на проекции по теореме Фалеса. Получаем проекции перпендикуляра длиной 40 мм (рисунок. 5.7).
Пример: Найти расстояние от точки А до плоскости, заданной следами
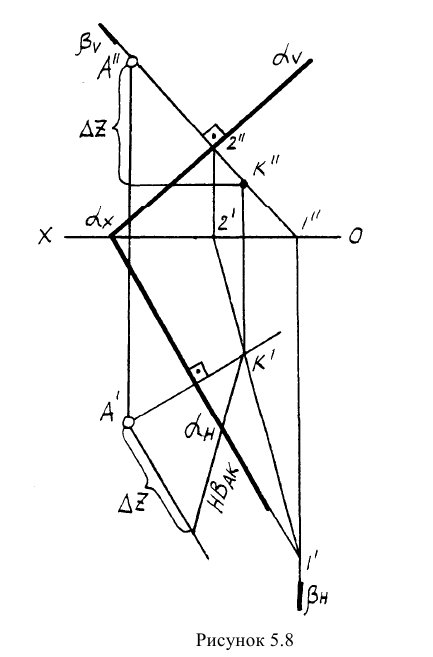
Решение: Из точки А строим перпендикуляр на заданную плоскость. Проекции перпендикуляра проводим перпендикулярно следам. Далее находим точку встречи перпендикуляра с заданной плоскостью с помощью вспомогательной фронтально-проецирующей плоскости  Находим линию пересечения плоскостей
Находим линию пересечения плоскостей  (линия 1-2) и точку встречи
(линия 1-2) и точку встречи  в месте пересечения горизонтальной проекции перпендикуляра с линией 1-2. Методом прямоугольного треугольника определяем НВ расстояния АК (рисунок 5.8).
в месте пересечения горизонтальной проекции перпендикуляра с линией 1-2. Методом прямоугольного треугольника определяем НВ расстояния АК (рисунок 5.8).
Пример: Определить расстояние от точки К до прямой AВ.
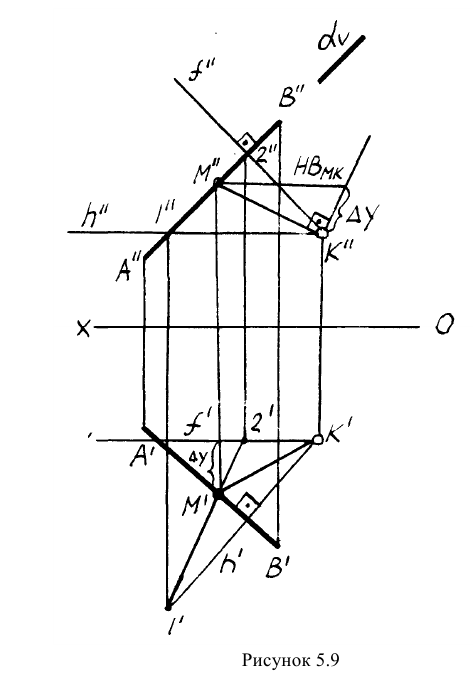
Решение: Через точку К проводим плоскость, перпендикулярную заданной прямой. Плоскость задаем пересекающимися горизонталью и фронталью. Их проекции проводим согласно алгоритму о перпендикуляре к плоскости (обратная задача). Далее находим точку встречи прямой AВ с проведенной плоскостью (точка М). Определяем натуральную величину КМ методом прямоугольного треугольника (рисунок 5.9).
Примеры метрических задач
Задачи, в которых определяются различные геометрические величины -расстояния между объектами, длины отрезков, углы, площади и т.д. называются метрическими. Решение многих метрических задач, например задач на определение кратчайших расстояний, требует построения перпендикулярных прямых и плоскостей.
Перпендикулярность является частным случаем пересечения прямых, прямой и плоскости или двух плоскостей. Необходимо установить соотношения, по которым строятся проекции перпендикулярных прямых и плоскостей.
Теорема о проекциях прямого угла
Прямой угол проецируется на плоскость без искажения, если одна из его сторон параллельна этой плоскости (рис. 10.1).
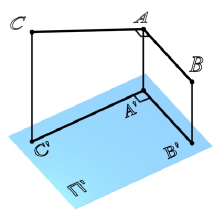
Рис. 10.1. Теорема о проекциях прямого угла
Дано : BAC = 90°; AB || П’
BAC = 90°; AB || П’
Доказать, что C’A’ A’B’
A’B’
Доказательство: если AB||П’, то A’B’||AB, но AA’П’^AA’A’B’ значит ABAA,AB плоскости CAA’C’, тогда и A’B’ CAA’C’. Следовательно,CA’A’B’.
На основании этой теоремы две взаимно перпендикулярные прямые (пересекающиеся или скрещивающиеся) проецируются на П1 в виде взаимно перпендикулярных прямых, если одна из них горизонталь, на П2 – если одна из них фронталь (рис. 10.2,а).
Условие перпендикулярности скрещивающихся прямых (рис. 10.2,б) сводятся к условиям перпендикулярности пересекающихся прямых, поведенных через произвольную точку и соответственно параллельных скрещивающимся прямым. Таким образом, понятие перпендикулярности можно отнести как к пересекающимся, так и к скрещивающимся прямым.
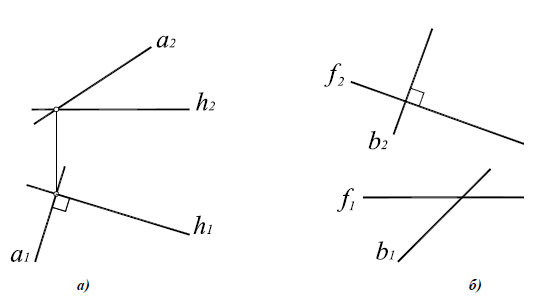
Рис. 10.2. Перпендикулярные прямые:
а -пересекающиеся a1 h1  a h ;
a h ;
б -скрещивающиеся b2  2
2  b
b 
Линии наибольшего наклона плоскости
Прямые, лежащие в плоскости и перпендикулярные линиям уровня этой плоскости, называются линиями наибольшего наклона к соответствующей плоскости проекций (рис. 10.3). Так, прямая, лежащая в плоскости и перпендикулярная горизонтали плоскости, называется линией наибольшего наклона к горизонтальной плоскости проекций, а прямая, перпендикулярная фронтали – линией наибольшего наклона к фронтальной плоскости проекций.
Угол между линией наибольшего наклона и ее проекцией на соответствующую плоскость равен углу наклона плоскости к плоскости проекций (см. рис. 9.15). 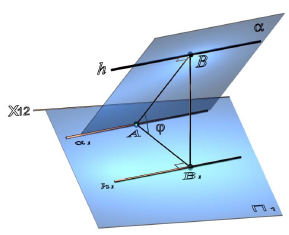
Рис. 10.3. Линия наибольшего наклона плоскости а к П1:
а – плоскость общего положения; h ∈α – горизонталь плоскости а; AB h – линия наибольшего наклона;
φ =  AB, AB 1 – угол наклона плоскости а к П1
AB, AB 1 – угол наклона плоскости а к П1
Перпендикулярность прямой и плоскости
Прямая перпендикулярна плоскости, если она перпендикулярна двум пересекающимся прямым этой плоскости. На основании теоремы о проекциях прямого угла можно получить условие перпендикулярности прямой общего положения и плоскости общего положения:
Если прямая а перпендикулярна плоскости α(ABC), то ее горизонтальная проекция перпендикулярна горизонтальной проекции горизонтали плоскости, а фронтальная проекция – фронтальной проекции фронтали плоскости.
Например, при построении прямой а, перпендикулярной плоскости α(ABC) (рис. 10.4,а), в плоскости строятся линии уровня – горизонталь и фронталь, затем через произвольную точку в плоскости, в данном случае точку K(h×), строится прямая, горизонтальная проекция которой перпендикулярна горизонтальной проекции горизонтали плоскости α(ABC), а фронтальная проекция – фронтальной проекции фронтали плоскости.
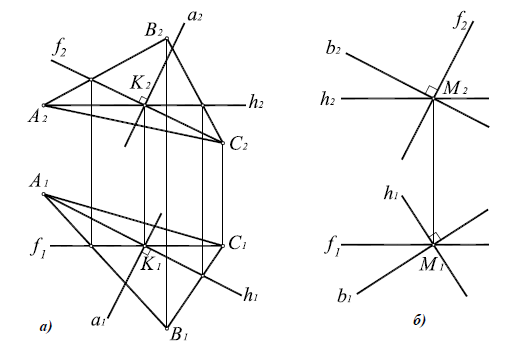
Рис. 10.4. Перпендикулярность прямой и плоскости:
а -построение прямой, перпендикулярной плоскости: 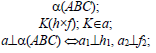
б -построение плоскости, перпендикулярной прямой: 
Аналогично решается задача о построении плоскости, перпендикулярной прямой общего положения (рис. 10.4,б)
Если плоскость проецирующая, проекции линий уровня совпадают со следом плоскости, перпендикулярность устанавливается по отношению к следу плоскости. Горизонтальная проекция перпендикуляра к горизонтально-проецирующей плоскости строится перпендикулярно горизонтальному следу плоскости (рис. 10.5,а). Прямая, перпендикулярная горизонтально-проецирующей плоскости, занимает положение горизонтальной линии уровня.
Аналогично, фронтальная проекция перпендикуляра к фронтально-проецирующей плоскости строится перпендикулярно фронтальному следу плоскости (рис. 10.5,б). Прямая, перпендикулярная фронтально-проецирующей плоскости, занимает положение фронтали.
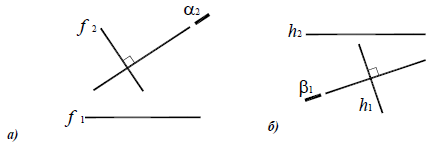
Рис. 10.5. Перпендикулярность прямой и проецирующей плоскости:
а -построение прямой, перпендикулярной плоскости;
б -построение плоскости, перпендикулярной прямой
Взаимная перпендикулярность плоскостей
Две плоскости взаимно перпендикулярны, если одна из них проходит через перпендикуляр к другой. Таким образом, построение взаимно перпендикулярных плоскостей сводится к построению перпендикулярных прямой и плоскости. Например, чтобы через произвольную точку А провести плоскость, перпендикулярную плоскости a(× h) (рис. 10.6), достаточно построить прямую n,перпендикулярную плоскости α(×h): n1h1; n22. Вторая прямая m, определяющая искомую плоскость, может быть задана произвольно – как пересекающая прямую n или параллельная ей.
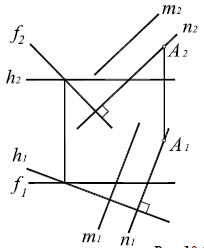
Рис. 10.6. Перпендикулярность двух плоскостей
Дано: α(h × ) ; A (A1, A2).
Построить: A ∈ β α .
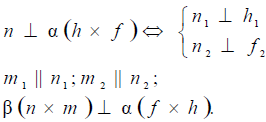
Определение метрических задач
Традиционно задачи, связанные с измерением длин, углов, площадей и объемов относят к метрическим. В основе решения этих задач лежит определение длины отрезка и, как производной от этого, площади плоской фигуры.
Определение длины отрезка
Одним из наиболее распространенных методов (рисунок 5.1) является метод прямоугольного треугольника (так его называют в начертательной геометрии) или метод ортогональных дополнений (название, принятое в линейной алгебре). 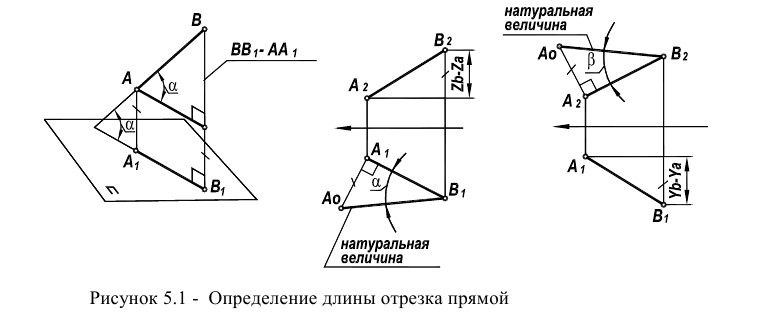
Идея метода базируется на следующем. Истинная величина отрезка AВ является гипотенузой прямоугольного треугольника, один из катетов которого, является проекцией отрезка AВ на плоскость проекции  а второй катет -разница координат
а второй катет -разница координат  концов отрезка для оси, отсутствующей в рассматриваемой плоскости проекции (ортогональное дополнение). Угол между проекцией и гипотенузой этого треугольника (а) определяет наклон прямой к соответствующей плоскости проекции.
концов отрезка для оси, отсутствующей в рассматриваемой плоскости проекции (ортогональное дополнение). Угол между проекцией и гипотенузой этого треугольника (а) определяет наклон прямой к соответствующей плоскости проекции.
На комплексном чертеже возможно решение как на плоскости  так и на плоскости
так и на плоскости  При правильных построениях
При правильных построениях  . Углы а и
. Углы а и  -углы наклона отрезка прямой АВ к плоскости
-углы наклона отрезка прямой АВ к плоскости  соответственно.
соответственно.
Определение площади треугольника
Определение площади треугольника и величины плоского угла можно свести к известной задаче построения треугольника по трем сторонам.
Для этого достаточно, используя рассмотренный выше способ прямоугольного треугольника, найти по порядку истинные величины сторон  (в соответствии с рисунком 5.2), а затем на свободном месте построить треугольник по трем сторонам.
(в соответствии с рисунком 5.2), а затем на свободном месте построить треугольник по трем сторонам.
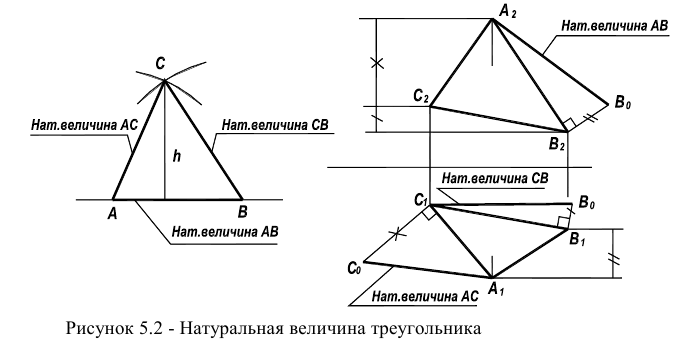
Величина плоского угла между двумя любыми сторонами этой фигуры может быть измерена на истинной величине треугольника.
Проецирование прямого угла
Решение многих задач Начертательной геометрии связано с необходимостью построения на чертеже взаимно перпендикулярных прямых и плоскостей. Базой для этого служит умение строить прямые углы на комплексном чертеже.
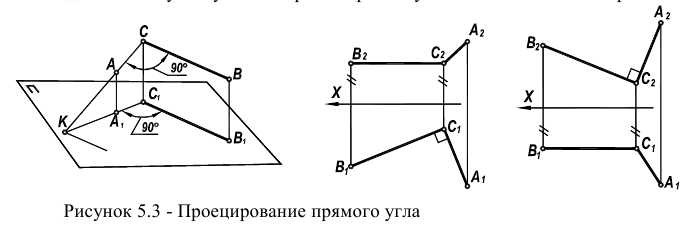
Известная в теории чертежа теорема (приведем ее без доказательства) утверждает, что прямой угол (в соответствии с рисунком 5.3) проецируется на
соответствующую плоскость проекций вез искажения, если одна из его сторон параллельна этой плоскости проекций, а вторая – ей не перпендикулярна.
Перпендикулярность прямых и плоскостей
Выше уже отмечалось, что в трехмерном Евклидовом пространстве отсутствует полная параллельность, то же самое можно сказать и о перпендикулярности. Понятие перпендикулярности так же, как и параллельности, вводится через определение.
Перпендикулярность прямой и плоскости
Считают, что прямая перпендикулярна плоскости, если она перпендикулярна двум пересекающимся (любым) прямым этой плоскости.
При решении задачи возможны два варианта: проведение перпендикулярной прямой к плоскости из внешней точки и из точки, лежащей в плоскости.
Рассмотрим возможность проведения перпендикуляра из точки К, лежащей в плоскости общего положения Р, заданной следами (рисунок 5.4).
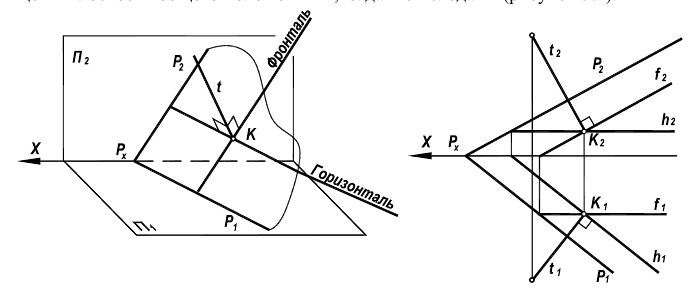
Рисунок 5.4 – Перпендикулярность прямой и плоскости
В плоскости Р (через точку К) проводятся горизонталь h и фронталь f. Прямые, перпендикулярные соответствующим проекциям линий уровня 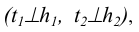 в соответствии с теоремой о проецировании прямого угла и данным выше определением, могут быть приняты за проекции прямой
в соответствии с теоремой о проецировании прямого угла и данным выше определением, могут быть приняты за проекции прямой  .
.
В том случае, когда точка К не лежит в плоскости Р, решение задачи аналогично (рисунок 5.5).
Поскольку положение точки пересечения искомого перпендикуляра не определено, решение соответствует следующей схеме:
а) в плоскости проводятся горизонталь h (через точку В) и фронталь f (через точку A), в случае задания плоскости следами за фронталь и горизонталь принимаются соответствующие следы плоскости 
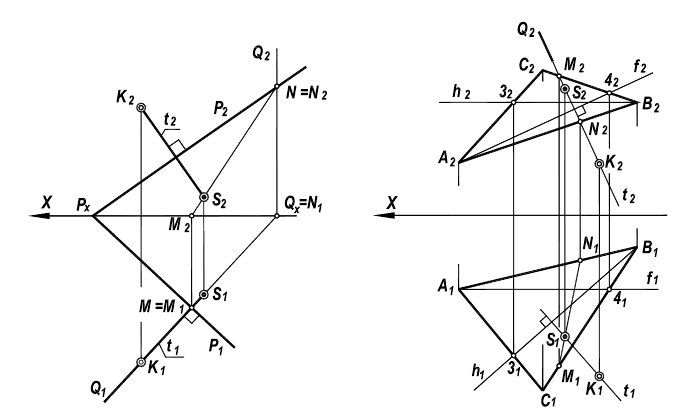
Рисунок 5.5 – Перпендикуляр к плоскости
б) из внешней точки К к соответствующим проекциям линий уровня (следам) проводятся перпендикулярные прямые – Линия t принимается за перпендикуляр, опущенный из точки К к плоскости Р;
– Линия t принимается за перпендикуляр, опущенный из точки К к плоскости Р;
в) определяется точка S пересечения этого перпендикуляра t и плоскости.
Расстояние от точки до плоскости
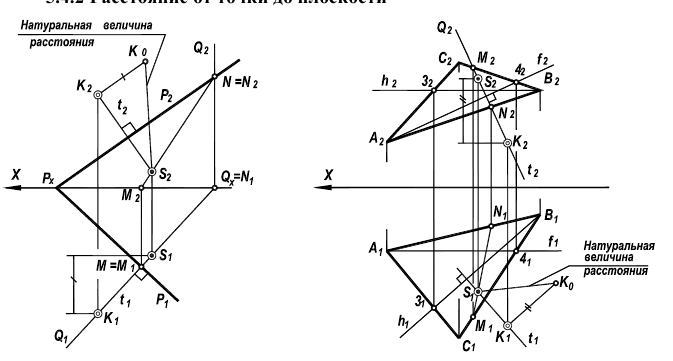
Рисунок 5.6 – Расстояние от точки до плоскости
Задачу на определение расстояние от точки до плоскости (рисунок 5.6) можно свести к решению уже известных задач на построение перпендикуляра к плоскости (рисунок 5.5) и определения натуральной величины отрезка прямой (рисунок 5.1)
Перпендикулярность плоскостей
Считают, что две плоскости взаимно перпендикулярны, если одна из них проходит через прямую, перпендикулярную другой плоскости.
Задача может ставиться, как проведение плоскости, перпендикулярной заданной, проходящей через точку или прямую.
При проведении искомой плоскости через точку, как и в предыдущем случае, возможны два варианта проведения плоскости перпендикулярной заданной: через точку, лежащую в плоскости и через точку вне ее (рисунок 5.7).
Точно такой же вариант возникает и при проведении перпендикулярной плоскости через прямую (лежащую в исходной плоскости или не лежащую).
Рассмотрим вариант построения плоскости, проходящей через точку. Пусть точка А лежит в плоскости Р. Линии  перпендикулярные соответствующим проекциям линий уровня (следам), определят перпендикуляр t к плоскости Р.
перпендикулярные соответствующим проекциям линий уровня (следам), определят перпендикуляр t к плоскости Р.
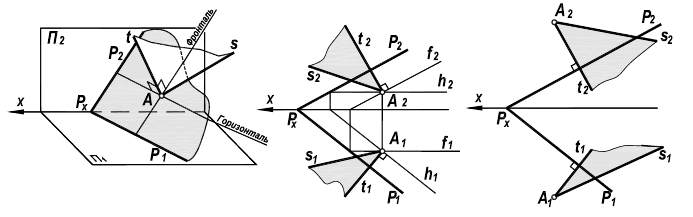
Рисунок 5.7 – Перпендикулярность плоскостей
Проведение через точку А произвольной прямой s позволяет определить плоскость Q, которая будет перпендикулярна плоскости Р.
Если точка А лежит вне плоскости Р, то решение аналогично. Проведение через точку А перпендикуляра t и произвольной прямой s определит плоскость Q, которая также, по определению, будет перпендикулярна плоскости Р.
Решение задачи на проведение плоскости через прямую аналогично решению задачи по проведению плоскости через точку. Достаточно вместо произвольной прямой s использовать заданную прямую АВ. И тогда, в соответствии с рисунком 5.8, задача сведется к проведению перпендикуляра t к плоскости Р (из точки, лежащей в плоскости или лежащей вне ее). 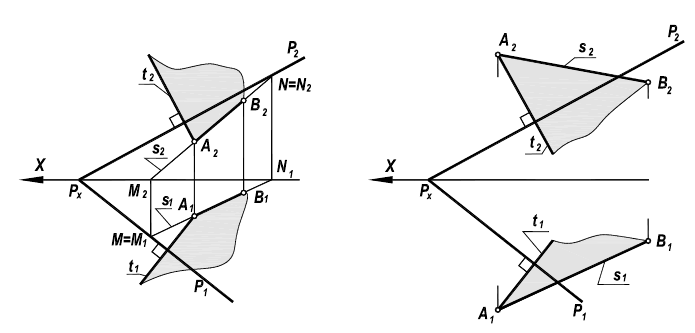
Рисунок 5.8 – Перпендикулярность плоскостей
Определение натуральных величин геометрических элементов
1. Определить натуральную величину отрезка общего положения:
- способом прямоугольного треугольника;
- способом замены плоскостей проекций преобразовать в прямую уровня;
- способом вращения вокруг проецирующей оси преобразовать в прямую уровня.
2. Определить натуральную величину плоскости общего положения (замкнутого отсека):
- способом замены плоскостей проекций преобразовать в плоскость уровня;
- способом вращения вокруг линии уровня преобразовать в плоскость уровня;
- способом плоскопараллельного перемещения преобразовать в плоскость уровня.
Определение расстояния между геометрическими элементами (образами)
1. Определить расстояние от точки до прямой общего положения:
- способом замены плоскостей проекций преобразовать плоскость, заданную прямой и точкой, в плоскость уровня (задачи 3 и 4 преобразования; прямую и точку рассматривать как плоскость);
- способом замены плоскостей проекций преобразовать прямую общего положения в проецирующую прямую (задачи 1 и 2 преобразования);
- способом вращения вокруг линии уровня преобразовать плоскость, заданную прямой и точкой, в плоскость уровня;
- способом плоскопараллельного перемещения преобразовать плоскость, заданную прямой и точкой, в плоскость уровня;
- способом задания плоскости, перпендикулярной к прямой (3-й тип задач), построить через заданную точку плоскость, перпендикулярную к прямой, и определить точку пересечения последней с плоскостью.
2. Определить расстояние между параллельными прямыми:
- способом замены плоскостей проекций преобразовать плоскость, заданную параллельными прямыми, в плоскость уровня (задачи 3 и 4 преобразования);
- способом замены плоскостей проекций преобразовать две параллельные общего положения в проецирующие прямые (задачи 1 и 2 преобразования);
- способом вращения вокруг линии уровня преобразовать плоскость, заданную параллельными прямыми, в плоскость уровня, ограничив ее замкнутым отсеком;
- способом плоскопараллельного перемещения преобразовать плоскость, заданную параллельными прямыми, в плоскость уровня;
- способом задания плоскости, перпендикулярной к прямой (3-й тип задач), построить плоскость через любую точку, принадлежащую одной из прямых, перпендикулярную ко второй прямой, и определить точку пересечения этой плоскости со второй прямой.
3. Определить расстояние между скрещивающимися прямыми, преобразовав одну из прямых в проецирующую (задачи 1 и 2 преобразования).
4. Определить расстояние от точки до плоскости:
- по теме «Перпендикулярность» – провести перпендикуляр к плоскости, построить точку пересечения этого перпендикуляра с заданной плоскостью и найти любым способом натуральную величину построенного отрезка (см. пункт 1);
- способом замены плоскостей проекций преобразовать плоскость общего положения в плоскость проецирующую.
5. Определить расстояние от точки до поверхности вращения:
- способом замены плоскостей проекций преобразовать плоскость, проведенную через точку и ось вращения поверхности, в плоскость уровня (задача 4 преобразования);
- способом вращения вокруг проецирующей оси повернуть плоскость, проведенную через точку и ось вращения поверхности, в плоскость уровня.
Определение углов наклона геометрических элементов к плоскостям проекций H и V
1. Определить углы наклона прямой общего положения к плоскостям проекций H и V:
- способом прямоугольного треугольника построить на двух проекциях натуральные величины отрезка и определить углы наклона прямой;
- способом замены плоскостей проекций преобразовать прямую общего положения в горизонтальную, а затем во фронтальную прямую (задача 1 преобразования);
- способом вращения вокруг соответствующей проецирующей оси преобразовать прямую общего положения в горизонтальную и во фронтальную прямые.
2. Определить угол наклона прямой к заданной плоскости общего положения:
- из любой точки прямой опустить перпендикуляр к плоскости;
- способом вращения вокруг линии уровня преобразовать построенную плоскость, заданную прямой и перпендикуляром, в плоскость уровня;
- искомый угол будет дополнять построенный угол до 90°.
3. Определить величину двухгранного угла, если на чертеже есть линии пересечения плоскостей, образующих двухгранный угол (ребро):
- способом замены плоскостей проекций преобразовать ребро двухгранного угла в проецирующую прямую (задачи 1 и 2 преобразования).
4. Определить угол между двумя плоскостями общего положения, если на чертеже нет линии пересечения заданных плоскостей (ребра):
- задача решается косвенным путем, для чего из любой точки пространства следует опустить перпендикуляры к заданным плоскостям, которые, в свою очередь, задают вспомогательную плоскость, перпендикулярную к этим плоскостям;
- эту вспомогательную плоскость способом вращения вокруг линии уровня следует преобразовать в плоскость уровня, определив угол между перпендикулярами (преобразование вспомогательной плоскости в плоскость уровня возможно и другими способами – ее плоскопараллельным перемещением или заменой плоскостей проекций);
- искомый угол будет дополнять построенный угол до 180° (углом между плоскостями считают угол острый).
Структуризация материала тринадцатой лекции в рассмотренном объеме схематически представлена на рис. 13.1 (лист 1). На последующих листах 2–7 компактно приведены иллюстрации к этой схеме для визуального повторения изученного материала при его повторении (рис. 13.2–13.7).
Метрические задачи:
Определение натуральной величины геометрических элементов:
1. Определение длины отрезка
Способ прямоугольного треугольника
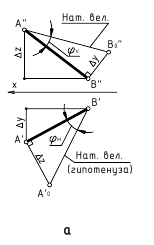
Способ замены плоскостей проекций (задача 1)
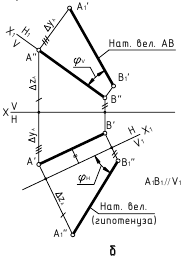
Способ вращения вокруг проецирующей оси
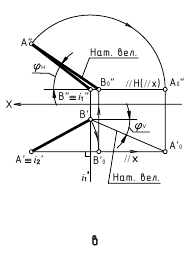
2. Определение площади замкнутого отсека
Способ замены плоскостей проекций (задачи 3 и 4)
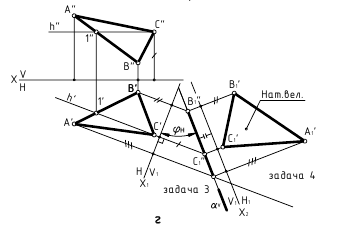
Способ вращения вокруг прямой уровня (горизонтали)
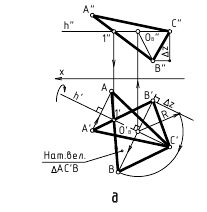
Способ вращения вокруг проецирующей оси i(i  V)
V)
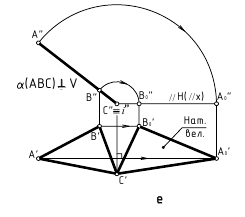
Способ плоско-параллельного перемещения (переноса)
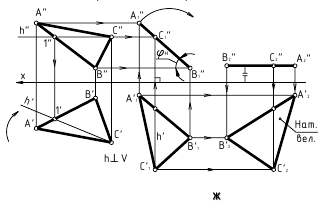
Определение расстояний:
1. Расстояние между точками – определяется величиной отрезка, соединяющего эти точки
2. Расстояние от точки до прямой – определяется величиной перпендикуляра, опущенного из точки к прямой
а. Прямой путь (перпендикулярность)
б. Способ замены плоскостей проекций: определить натуральную величину плоскости, которую определяют точка и прямая (см.рис. 13.2, г)
в. Способ вращения вокруг прямой уровня: определить натуральную величину плоскости, которую определяют точка и прямая (см.рис.13.2, д)
г. Способ плоскопараллельного переноса: определить натуральную величину плоскости, которую определяют точка и прямая (см.рис.13.2, ж)
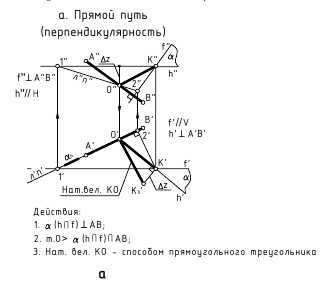
3. Расстояние между параллельными прямыми – определяется величиной перпендикуляра, проведённого из произвольной точки одной прямой к другой прямой
а. Способ замены плоскостей проекции (рассматриваем две прямые) – задачи 1 и 2 (преобразовать прямые общего положения AB и CD в проецирующие)
б. Способ замены плоскостей проекции (рассматриваем плоскость, которую определяют параллельные прямые) – задачи 3 и 4 (определить натуральную величину плоскости ? (AB//СВ))
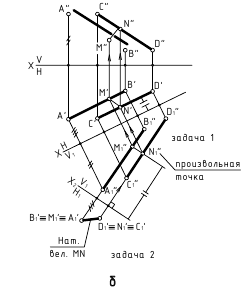
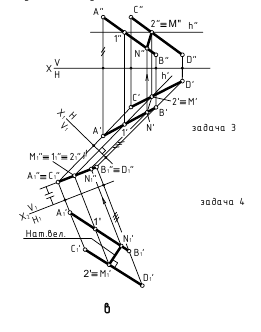
4. Расстояние между скрещивающимися прямыми – определяется величиной перпендикуляра, проведённого от одной из прямых, преобразованной в точку, к другой прямой (задачи 1 и 2 замены плоскостей проекции).
Способ замены плоскостей проекций – задачи 1 и 2
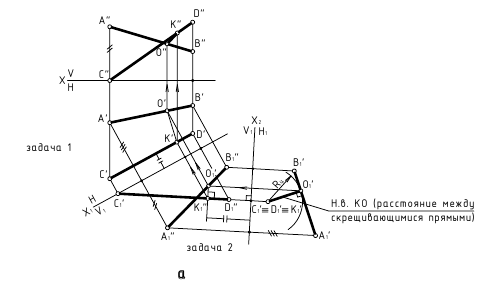
5. Расстояние от точки до плоскости – определяется величиной перпендикуляра, проведённого из точки на плоскость до точки его пересечения с этой плоскостью.
а. Прямой путь (перпендикулярность)
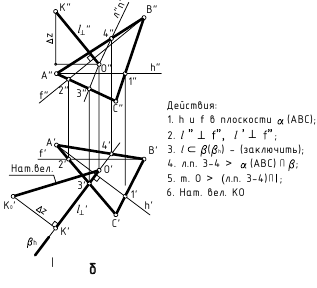
б. Способ замены плоскостей проекций (плоскость преобразовать в проецирующую – задача 3)
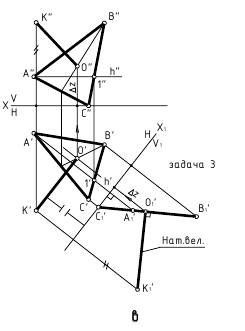
6. Расстояние между прямой и параллельной ей плоскостью – определяется величиной перпендикуляра, проведённого из произвольной точки на прямой к плоскости.
7. Расстояние между параллельными плоскостями – определяется величиной отрезка перпендикуляра, опущенного из точки одной плоскости на другую плоскость (до точки пересечения с другой плоскостью).
8. Расстояние от точки до поверхности
a. Cпособ вращения вокруг проецирующей оси
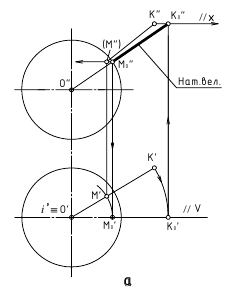
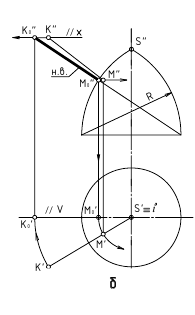
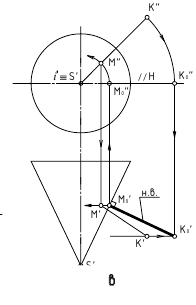
б. Способ замены плоскостей проекции
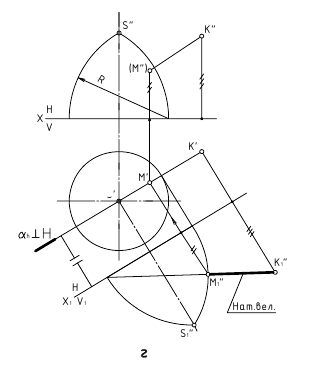
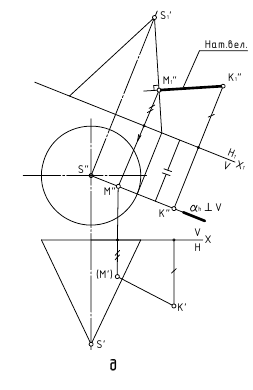
Определение величин углов:
1. Угол φ между скрещивающимися прямыми – определяется плоским углом, образованным двумя пересекающимися прямыми, проведёнными из произвольной точки пространства параллельно скрещивающимся прямым (рис. 13.6, а)
Способ вращения вокруг линии уровня
Дано:
а и b – скрещивающиеся прямые
Требуется:
∠φ – ?
Решение:
1. 
2. ∠φ – вращением вокруг фронтали, проведённой в построенной плоскости α(d ∩с)
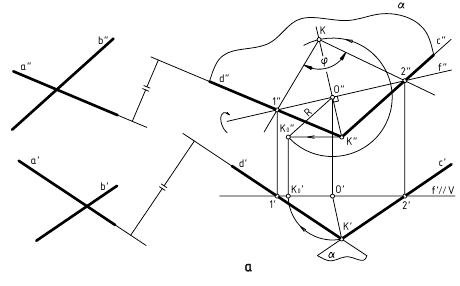
2. Угол φ между прямой и плоскостью – определяется углом между прямой и её проекцией на эту плоскость.
Дано:
α(h ∩ f);
AB – прямая общего положения
Требуется:
∠φ – ?
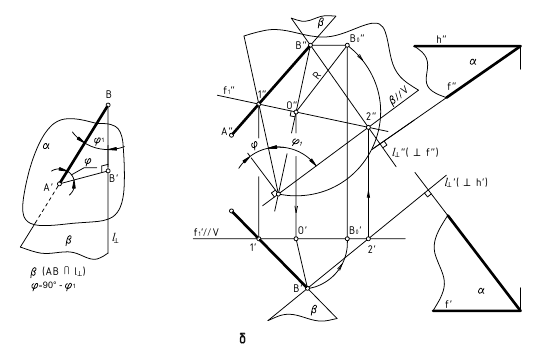
Решение:
1. l α(h ∩ f);
l” f”;
l‘ h’;
2. ∠φ – вращением вокруг фронтали, проведённой в построенной плоскости β(AB∩l)
3. Угол φ между плоскостями α и β – определяется линейным углом, образованным двумя прямыми, по которым некоторая плоскость γ, перпендикулярная плоскостям (или их ребру), пересекает эти плоскости (углом между плоскостями считают острый угол).
а. Если на чертеже нет ребра (линии пересечения заданных плоскостей) – угол φ определяется способом вращения вокруг линии уровня (рис. а)
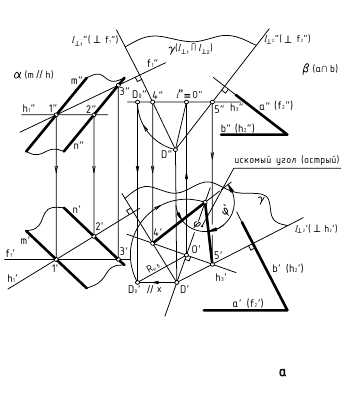
Дано:
(m // h); (а ∩ b).
Требуется:
∠φ – ?
Решение:
1. провести в заданной плоскости фронтали и горизонтали;
2. из произвольной точки пространства D (D’, D”) провести перпендикуляры l1 и l2 к заданными плоскостям, которые определяют плоскость γ(l1 ∩ l2);
3. ∠φ – вращением вокруг горизонтали h3, проведённой в построенной плоскости γ(l1 ∩ l2).
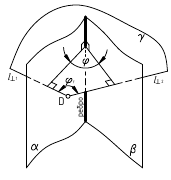
б. Если на чертеже есть ребро (линия пересечения заданных плоскостей) – угол φ определяется способом замены плоскостей проекций (задачи 1 и 2, рис. б)
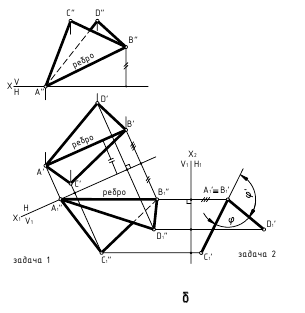
ребро АВ двугранного угла преобразовать двумя заменами в проецирующую прямую.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Тени в ортогональных проекциях
- Кривые поверхности
- Пересечения криволинейных поверхностей
- Пересечения поверхностей с прямой и плоскостью
- Пересечение поверхности плоскостью и прямой
- Развертки поверхностей
- Способы преобразования проекций
- Взаимное положение прямой и плоскости
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
[spoiler title=”источники:”]
http://mydocx.ru/7-38390.html
http://www.evkova.org/reshenie-metricheskih-zadach
[/spoiler]
6.1. Сущность способа.
Сущность способа
вращения состоит в изменении положения
объекта, заданного на эпюре, таким
образом, чтобы определенные его элементы
заняли относительно плоскостей проекций
частное положение и проецировались без
искажения.
Начиная преобразование
этим способом, надо подготовить аппарат
вращения: ось, центр и радиус вращения.
По положению оси
вращения различают несколько видов
этого способа.
Вращение вокруг
оси, перпендикулярной плоскости проекций.
При вращении точки в пространстве вокруг
оси, перпендикулярной горизонтальной
плоскости проекций, проекции точки
перемещаются так: горизонтальная – по
окружности, фронтальная – по прямой,
параллельной оси проекций (или
перпендикулярной оси вращения) (рис.40).
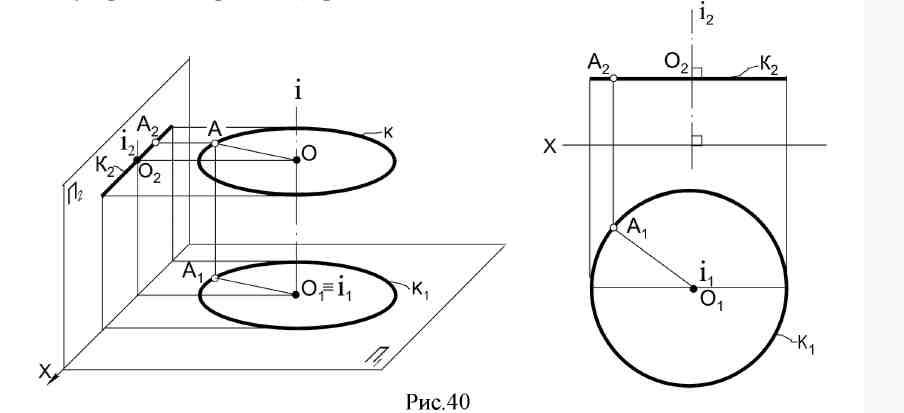
Если ось вращения
перпендикулярна фронтальной плоскости
проекций, то на эпюре получается обратная
картина (рис.41).
Чтобы повернуть
вокруг оси прямую линию, достаточно
вращать ее точки на один и тот же угол.
При вращении плоскости следует вращать
определяющие ее элементы: три точки,
прямую и точку и т.д. Этим способом удобно
определять натуральную величину отрезка
прямой и угол наклона ее к плоскости
проекций, при этом ось вращения рационально
провести через одну из точек прямой
линии, чтобы избежать лишних построений.

Определить
натуральную величину отрезка прямой
АВ (рис.
42)
Чтобы прямая
проецировалась в натуральную величину,
она должна располагаться параллельно
какой – либо плоскости проекций, а значит,
одна ее проекция должна быть параллельна
оси проекций:
АВ ||
П1;
Â2B2
||
ОХ; ось
вращения проходит через точку В;
 1
B 1
– натуральная величина АВ.

Рис. 42
6.2. Вращение вокруг горизонтали или фронтали.
При вращении точки
в пространстве вокруг горизонтали
горизонтальная проекция точки перемещается
по прямой, перпендикулярной проекции
горизонтали, а фронтальная – по эллипсу
(искаженной проекции окружности
вращения). При решении задач этот эллипс
не строится.
Отрезок
О1А0
– натуральная
величина радиуса вращения точки А;
отложив его
на линии, перпендикулярной h1,
мы точку перемещаем в плоскость,
параллельную горизонтальной плоскости
проекций П1
(рис.43)

Пример: Определить
натуральную величину треугольника АВС
(рис. 44).

Рис. 44
За ось вращения i
примем горизонталь h
и повернем треугольник АВС
вокруг нее
как вокруг оси вращения до положения,
параллельного плоскости П1;
точки А
и 1
остаются
неподвижными, а В
и С
вращаются.
Способом прямоугольного треугольника
определяем натуральные величины радиусов
вращения, а траектории движения на П1
перпендикулярны
линии i1.
Новое положение
точки С – С0
можно
найти как пересечение двух
траекторий вращения С1ОС1
и В011,
которая уже лежит в плоскости, параллельной
горизонтальной плоскости проекций.
A1B0C0
– натуральная величина треугольника
АВС.
6.3. Плоскопараллельное перемещение (вращение без указания оси).
При вращении прямой
линии, плоскости и любого другого
объекта, их проекции на плоскости,
перпендикулярной оси вращения, сохраняют
свою величину и форму. Вторые проекции
объекта перемещаются по прямым,
перпендикулярным проекции оси вращения
(или линиям связи). Эти свойства проекций
позволяют перемещать данный объект в
частное положение, используя свободное
поле эпюра, без нанесения проецирующих
осей вращения.

На рис. 45 отрезок
АВ повернем
на некоторый угол вокруг условной оси,
перпендикулярной
горизонтальной
плоскости проекций. Из положения АВ
он переместится
в положение А1В1;
горизонтальная
проекция отрезка А1В1
займет
положение А11В11;
|А1В1|=
|А11В11|.
Пример. Определить
натуральную величину отрезка AB
(рис. 46).
Одна проекция
отрезка AB
должна быть
расположена параллельно оси Х.
Повернем A1B1,
до такого положения, при этом фронтальные
проекции точек переместятся по линиям,
параллельным оси Х, сохраняя проекционную
связь.
Длина А21В21
равна натуральной величине отрезка AB.

Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
