Содержание
- Номинальный ток асинхронных двигателей
- Высокий стартовый ток – главный недостаток асинхронного электродвигателя
- Расчет номинального значения тока асинхронного электродвигателя
- Трехфазный асинхронный двигатель
- Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Конструкция асинхронного электродвигателя
- Принцип работы. Вращающееся магнитное поле
- Концепция вращающегося магнитного поля
- Действие вращающегося магнитного поля на замкнутый виток
- Короткозамкнутый ротор асинхронного двигателя
- Скольжение асинхронного двигателя. Скорость вращения ротора
- Звезда и треугольник
- Обозначение выводов статора трехфазного электродвигателя
- Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
- Управление асинхронным двигателем
- Прямое подключение к сети питания
- Нереверсивная схема
- Реверсивная схема
- Плавный пуск асинхронного электродвигателя
- Частотное управление асинхронным электродвигателем
- Трехфазный асинхронный двигатель с фазным ротором
- Конструкция АДФР
- Фазный ротор
- Статор АДФР
- Обозначение выводов вторичных обмоток трехфазного АДФР
- Пуск АДФР
Номинальный ток асинхронных двигателей
Подавляющее большинство электродвигателей, используемых в промышленности, относятся к трехфазному асинхронному типу. Для питания таких устройств необходима промышленная трехфазная сеть переменного тока, обеспечивающая сетевое напряжение заданной частоты и напряжения. Высокая популярность асинхронных электродвигателей обусловлена дешевизной, простотой изготовления и механической прочностью данных устройств. Кроме того, изменяя схему подключения обмоток (звезда или треугольник) можно подключать двигатель к сетям различного напряжения (обычно используются комбинации 220/380 и 127/220В).
Высокий стартовый ток – главный недостаток асинхронного электродвигателя
Однако несмотря на множество неоспоримых преимуществ, асинхронные двигатели имеют минусы, среди которых одним из наиболее значительных является достаточно большой пусковой ток электродвигателя данного типа. Особенно заметен этот недостаток в асинхронных устройствах с короткозамкнутым ротором. Такие двигатели следует с осторожностью применять, в тех системах, для которых требуется значительный пусковой момент, который может привести к превышению номинального значения силы тока (Iн).
Для большинства асинхронных электродвигателей допустимо кратковременное превышение значение Iн, которое может произойти в момент пуска. Так, в момент запуска, допускается шестикратное превышение значения номинального тока при условии, что оно будет длиться не более 5 секунд. В случае, если в некотором режиме номинальный ток превышается не более чем в два раза, допускается увеличить время работы устройства в этом режиме до 15 секунд.
Расчет номинального значения тока асинхронного электродвигателя
Номинальный ток электродвигателя, при котором возможна его длительная работа, связан с номинальной мощностью устройства и его КПД следующим выражением: Iн=1000*Pн/(Uн*cosφ√η), где Рн – мощность, Uн – номинальное напряжение, которым питается электродвигатель, η – КПД, а cosφ – коэффициент мощности двигателя.
Отсюда можно сделать важный вывод, который состоит в том, что при уменьшении U (например при переключении устройства из сети в 220 В сеть 127 В), увеличивается ток двигателя, который может превысить номинальное значение. А длительная работа двигателя на токе I>Iн может привести не только к его повреждению, но и к возгоранию. Поэтому, используемые в системе с электрическим двигателем предохранительные устройства должны быть подобраны так, чтобы предотвратить продолжительную работу при токе I>Iн.
Источник
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.


Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
 ,
,
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени


Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.





Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
 Влияние вращающегося магнитного поля на замкнутый проводник с током
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
 Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.


Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2  Трехфазный ток (разница фаз 120°)
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
 |
 |
Uл, Uф — линейное и фазовое напряжение, В, |
 |
 |
Iл, Iф — линейный и фазовый ток, А, |
 |
 |
S — полная мощность, Вт |
 |
|
P — активная мощность, Вт |
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
 Подключение электродвигателя по схеме звезда и треугольник
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
 Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:






- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
 Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде.
FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
 Функциональная схема частотно-регулируемого привода
Функциональная схема частотно-регулируемого привода
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
 Скалярное управление асинхронным двигателем с датчиком скорости
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
 Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
 Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
 Фазный ротор
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Пуск АДФР

Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
Источник

Содержание:
- Расчет мощности электродвигателя.
- Расчет тока электродвигателя.
- Расчет коэффициента мощности электродвигателя.
- Расчет КПД электродвигателя.
1. Расчет мощности электродвигателя
Расчет мощности электродвигателя по току можно произвести с помощью нашего онлайн калькулятора:
Расчет мощности трехфазного электродвигателя
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
Расчет мощности двигателя производится по следующей формуле:
P=√3UIcosφη
где:
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
2. Расчет тока электродвигателя
Расчет номинального и пускового тока электродвигателя по мощности можно произвести с помощью нашего онлайн калькулятора:
Расчет тока трехфазного электродвигателя
Укажите мощность электродвигателя в килоВаттах
Укажите номинальное напряжение
Укажите коэффициент мощности (cosφ)*
*при отсутствии данных укажите значение:
от 0,75 до 0,8 – для двигателей мощностью до 1,1 кВт
от 0,8 до 0,85 – для двигателей мощностью 1,1 – 7,5 кВт
от 0,85 до 0,9 – для двигателей мощностью более 7,5 кВт
*при отсутствии данных укажите значение:
от 70 до 75 – для двигателей мощностью до 1,1 кВт
от 75 до 80 – для двигателей мощностью 1,1 – 7,5 кВт
от 80 до 85 – для двигателей мощностью более 7,5 кВт
Расчет номинального тока двигателя производится по следующей формуле:
Iном=P/√3Ucosφη
где:
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателя либо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Расчет пускового тока электродвигателя производится по формуле:
Iпуск=Iном*K
где:
- К — Кратность пускового тока, данная величина берется из паспорта электродвигателя, либо из каталожных данных (в приведенном выше онлайн калькуляторе кратность пускового тока определяется приблизительно исходя из прочих указанных характеристик электродвигателя).
3. Расчет коэффициента мощности электродвигателя
Онлайн расчет коэффициента мощности (cosφ) электродвигателя
Расчет коэффициента мощности трехфазного электродвигателя
Расчет cosφ (косинуса фи) двигателя производится по следующей формуле:
cosφ=P/√3UIη
где:
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателя либо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
4. Расчет КПД электродвигателя
Онлайн расчет КПД (коэффициента полезного действия) электродвигателя
Расчет КПД трехфазного электродвигателя
Укажите мощность электродвигателя в килоВаттах
Укажите номинальное напряжение
Укажите коэффициент мощности (cosφ)*
*при отсутствии данных укажите значение:
от 0,75 до 0,8 – для двигателей мощностью до 1,1 кВт
от 0,8 до 0,85 – для двигателей мощностью 1,1 – 7,5 кВт
от 0,85 до 0,9 – для двигателей мощностью более 7,5 кВт
Расчет коэффициента полезного действия электродвигателя производится по следующей формуле:
η=P/√3UIcosφ
где:
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателя либо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
Оказались ли полезны для Вас данные онлайн калькуляторы? Или может быть у Вас остались вопросы? Напишите нам в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
↑ Наверх
Расчет номинального тока электродвигателя
Расчет номинального тока асинхронного электродвигателя онлайн
Формула для расчета номинального тока трехфазного асинхронного электродвигателя переменного тока:
Номинальные данные электродвигателя указываются на заводском щитке или в другой технической документации.
![]()
Поделиться в соц сетях:
Популярные сообщения из этого блога
Найти тангенс фи , если известен косинус фи
Калькулятор коэффициент мощности cos fi в tg fi Как найти тангенс фи, если известен косинус фи формула: tg φ = (√(1-cos²φ))/cos φ Калькулятор онлайн – косинус в тангенс cos φ: tg φ: Поделиться в соц сетях: Найти синус φ, если известен тангенс φ Найти косинус φ, если известен тангенс φ
Индекс Руфье калькулятор
Проба Руфье калькулятор онлайн. Первые упоминания теста относиться к 1950 году. Именно в это время мы находим первое упоминание доктора Диксона о “Использование сердечного индекса Руфье в медико-спортивном контроле”. Проба Руфье – представляет собой нагрузочный комплекс, предназначенный для оценки работоспособности сердца при физической нагрузке. Индекс Руфье для школьников и студентов. У испытуемого, находящегося в положении лежа на спине в течение 5 мин, определяют число пульсаций за 15 сек (P1); После чего в течение 45 сек испытуемый выполняет 30 приседаний. После окончания нагрузки испытуемый ложится, и у него вновь подсчитывается число пульсаций за первые 15 с (Р2); И в завершении за последние 15 сек первой минуты периода восстановления (Р3); Оценку работоспособности сердца производят по формуле: Индекс Руфье = (4(P1+P2+P3)-200)/10; Индекс Руфье для спортсменов Измеряют пульс в положении сидя (Р1); Спортсмен выполняет 30 глубоких приседаний в
Найти косинус фи (cos φ), через тангенс фи (tg φ)
tg фи=… чему равен cos фи? Как перевести тангенс в косинус формула: cos(a)=(+-)1/sqrt(1+(tg(a))^2) Косинус через тангенс, перевести tg в cos, калькулятор – онлайн tg φ: cos φ: ± Поделиться в соц сетях:
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
|
U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
|
|
| Полезная мощность на валу, кВт |
|
Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
|
|
| Вращающий момент двигателя, кГм |
|
nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
|
f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
|
|
| Скорость вращения ротора при нагрузке, об/мин |
|
|
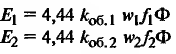
| ЭДС обмоток статора и ротора, В |
|
kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
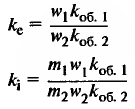
| Коэффициенты трансформации по напряжению и по току |
|
w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
|
zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
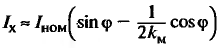
| Ток холостого хода, А |
|
Iном. – номинальный ток двигателя, А |
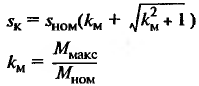
| Критическое скольжение |
|
sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
|
Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
|
|
| КПД двигателя при введении добавочного сопротивления в ротор |
|
|
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
|
U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателя
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Стандартными
напряжениями на промышленных предприятиях
являются 220, 380, 500, 3000, 6000 и 10000В переменного
тока и 220 и 440В постоянного тока. Этой
шкалой номинальных напряжений и следует
пользоваться. При выборе величины
напряжения учитывают экономичность и
безопасность обслуживания. Для
асинхронных и синхронных двигателей
малой и средней мощностей (до 100 кВт)
целесообразно применять напряжение
380В. 220В не рекомендуется, т.к. в этом
случае увеличивается расход цветных
металлов. 500В – реже, для двигателей
средней мощности. Для привода большой
мощности целесообразно применять
двигатели на напряжение 3000, 6000 или
10000В. Диктуется выбор одного из них
номинальным напряжением высоковольтной
сети, питающей предприятие.
В условиях повышенной
опасности поражения электрическим
током применяют напряжение 36В.
При постоянном
токе применяются двигатели на 220В, а для
мощных приводов – 440В, хотя последние
менее надежны.
4.3 Выбор номинальной частоты вращения двигателя
Двигатели одинаковой
мощности выпускаются промышленностью
на разные частоты вращения. Чем больше
частота вращения при данной мощности,
тем меньше размеры и масса машины, а так
как стоимость определятся в основном
массой, то с повышением частоты вращения
стоимость двигателя снижается. Двигатели
с большей частотой вращения потребляют
меньшую реактивную мощность, имеют
более высокий КПД. Большинство же рабочих
машин требуют сравнительно небольшие
частоты вращения. Поэтому электродвигатели
и рабочие машины часто приходится
сочленять посредством передаточных
устройств. Номинальную частоту вращения
двигателя обычно выбирают на основании
анализа и сравнения ряда вариантных
расчетов с передаточными устройствами
и без них.
4.4 Выбор конструктивного исполнения двигателя
Конструктивное
исполнение двигателя диктуется условиями
окружающей среды, способами установки
и сочленения их с производственными
механизмами.
Окружающая среда
может содержать значительное количество
пыли, дыма, едких газов, влаги, взрывоопасной
смеси, кислотных паров и т. д. Обмотки
двигателя загрязняются, изоляция
разъедается и разрушается. В соответствии
с требованиями защиты обмоток от действия
внешней среды и требованиями
взрывобезопасности выпускаются
электродвигатели в следующем исполнении:
– открытые, не
имеющие специальных приспособлений
для предохранения от случайных
прикосновений к вращающимся и токоведущим
частям, а также для предотвращения
попадания посторонних предметов внутрь
двигателя;
– защищенные,
имеющие специальных приспособлений
для предохранения от случайных
прикосновений к вращающимся и токоведущим
частям, а также для предотвращения
попадания посторонних предметов внутрь
двигателя. Защитные приспособления
выполняются в виде сеток, чтобы не
нарушать естественную вентиляцию. Эти
двигатели не защищены от попадания
капель влаги, пыли и газов внутрь
двигателя. Рекомендуются для использования
во всех производственных помещениях с
нормальной средой;
– закрытые,
снабженные боковыми крышками, которые
прилегают к корпусу достаточно плотно,
но не герметически. Эти двигатели
защищены от проникновения пыли извне.
Они дороже защищенных. Рекомендуются
в помещениях сырых, пыльных, с едкими
парами и газами;
– герметически
закрытые, которые способны длительно
находиться под водой; –взрывозащищенные,
снабженные специальными кожухами,
которые выдерживают давление при взрыве
газов или паров, проникающих под корпус,
но не пропускают пламя наружу. Применяются
в помещениях, содержащих взрывоопасные
газы и пары.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
