Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Источник
Двигатель с параллельным возбуждением




Электрические машины постоянного тока.
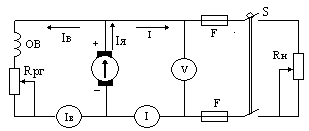
Генератор с параллельным возбуждением.
Ток отдаваемый генератором в сеть:
Мощность отдаваемая сети: Р2 = U∙I =I 2 ∙R
Мощность приводного двигателя: Р1 = Р2/ η
Мощность потерь в обмотке якоря:
Мощность потерь в обмотке возбуждения:
Суммарные потери: ΣР = Р1 – Р2 .
Коэффициент полезного действия генератора:
Двигатель с параллельным возбуждением.
Напряжение двигателя: U = E + Iя ∙Rя.
Мощность потребляемая от сети: Р1 = U∙I
Коэффициент полезного действия двигателя:
Пример 6.1.Генератор постоянного тока с параллельным возбуждением развивает номинальное напряжение Uн =220 В. Генератор нагружен на нагрузку Rн = 2,2 Ом. Сопротивление обмотки якоря Rя = 0,2 Ом, обмотки возбуждения Rв =220 Ом. КПД генератора η = 0,87. Определить следующие величины:
1.ток нагрузки; 2. ток якоря; 3. ток возбуждения; 4. эдс генератора;
5.полезную мощность; 6. потребляемую мощность; 7. суммарные потери в генераторе; 8. потери в обмотке якоря; 9. потери в обмотке возбуждения.
3.Ток якоря: Iя = I – Iв = 100 – 1= 99 А.
Е = U+ Iя ∙Rя = 220 + 99∙0,1 = 229,9 В.
Р2 = Uн∙I = 220∙100 = 22000 Вт = 22 кВт.

7.Суммарные потери в генераторе:
ΣР = Р1– Р2 = 25,87 – 22 = 3,87 кВт.
Ря = Iя 2 ∙Rя = 99 2 ∙0,2 = 1960,2 Вт.
9.Потери в обмотке возбуждения:
Ответ: I = 100А; Iв = 1 А; Iя = 99 А; Е = 229,9 В; Р2 = 22 кВт;
Р1 = 25,87 кВт; ΣР = 3,87 кВт; Ря = 1960,2 Вт; Рв = 220 Вт.
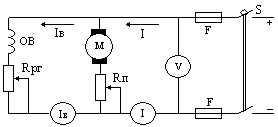
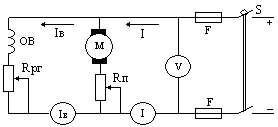
Пример 6.2.Рис.8.2.Двигатель постоянного токапараллельного возбуждения работает от сети Uн = 220 В. Частота вращения якоря n2 = 1450 об/мин. Ток двигателя I = 500 А, противо–эдс якоря Е = 202 В, сопротивление обмотки возбуждения Rв = 44 Ом. Кпд двигателя
η = 0,88. Определить:1.ток возбуждения; 2.ток якоря; 3. сопротивление обмотки якоря; 4.потребляемую мощность; 5.полезную мощность на валу; 6 Суммарные потери в двигателе; 7.потери в обмотке якоря; 8.потери в обмотке якоря; 9.вращающий момент на валу.
3. Сопротивление обмотки якоря:

4. Потребляемая мощность от сети:
Р1 = Uн∙I = 220 ∙500 = 110 000 Вт = 110 кВт.
5. Полезная мощность на валу:
Р2 = P1∙ η = 110 ∙ 0,87 = 95,7 кВт.
6. Суммарные потери в двигателе:
ΣР = Р1 – P2 = 110 – 95,7 = 14,3 кВт.
7. Потери в обмотке возбуждения:
Pв = Uн∙Iв = 220∙5 = 1100 Вт =1,1 кВт.
Ря = Iя 2 ∙ Rя =495 2 ∙0,016 = 3920,4 Вт = 3,92 кВт.
9. Вращающий момент на валу:

Ответ: Iв = 5 А,Iя = 495 А, Rя = 0,016 Ом,Р1 = 110 кВт, Р2 = 95,7 кВт,
ΣР = 14,3 кВт, Pв = 1,1 кВт, Ря =3,92 кВт М = 630,7 Нм.
Источник
Двигатель с параллельным возбуждением
Напряжение двигателя: U = E + Iя ∙Rя.
Мощность потребляемая от сети: Р1 = U∙I
Момент на валу двигателя: М = 9550∙ Р2 / n2.
Коэффициент полезного действия двигателя: η = Р2/Р1 = (U∙I- ΣР) / U∙I
Пример 8.1.Генератор постоянного тока с параллельным возбуждением развивает номинальное напряжение Uн =220 В. Генератор нагружен на наг- рузку Rн = 2,2 Ом. Сопротивление обмотки якоря Rя = 0,2 Ом, обмотки возбуждения Rв =220 Ом. КПД генератора η = 0,87. Определить следую- щие величины:
1.ток нагрузки; 2. ток якоря; 3. ток возбуждения; 4. эдс генератора;
5.полезную мощность; 6. потребляемую мощность; 7. суммарные потери в генераторе; 8. потери в обмотке якоря; 9. потери в обмотке возбуждения.
Е = U+ Iя ∙Rя = 220 + 99∙0,1 = 229,9 В.
Р2 = Uн∙I = 220∙100 = 22000 Вт = 22 кВт.

7.Суммарные потери в генераторе:
ΣР = Р1– Р2 = 25,87 – 22 = 3,87 кВт.
Ря = Iя 2 ∙Rя = 99 2 ∙0,2 = 1960,2 Вт.
9.Потери в обмотке возбуждения:
Ответ: I = 100А; Iв = 1 А; Iя = 99 А; Е = 229,9 В; Р2 = 22 кВт;
Р1 = 25,87 кВт; ΣР = 3,87 кВт; Ря = 1960,2 Вт; Рв = 220 Вт.
Пример 8.2.Рис.8.2.Двигатель постоянного токапараллельного возбуждения работает от сети Uн = 220 В. Частота вращения якоря n2 = 1450 об/мин. Ток двигателя I = 500 А, противо–эдс якоря Е = 202 В, сопротивление обмотки возбуждения Rв = 44 Ом. Кпд двигателя η = 0,88.
1.ток возбуждения; 2.ток якоря; 3. сопротивление обмотки якоря; 4.потребляемую мощность; 5.полезную мощность на валу; 6 Суммарные потери в двигателе; 7.потери в обмотке якоря; 8.потери в обмотке якоря;
9.вращающий момент на валу.
3.Сопротивление обмотки якоря:

2.Потребляемая мощность от сети:
Р1 = Uн∙I = 220 ∙500 = 110 000 Вт = 110 кВт.
3.Полезная мощность на валу:
Р2 = P1∙ η = 110 ∙ 0,87 = 95,7 кВт.
4.Суммарные потери в двигателе:
ΣР = Р1 – Р2 = 110 – 95,7 = 14,3 кВт.
5.Потери в обмотке возбуждения:
Pв = Uн∙Iв = 220∙5 = 1100 Вт =1,1 кВт.
Ря = Iя 2 ∙ Rя =495 2 ∙0,016 = 3920,4 Вт = 3,92 кВт.
7.Вращающий момент на валу:

Ответ: Iв = 5 А, Iя = 495 А, Rя = 0,016 Ом, Р1 = 110 кВт, Р2 = 95,7 кВт,
ΣР = 14,3 кВт, Pв = 1,1 кВт, Ря =3,92 кВт, М = 630,7 Нм.
Задача 8.(Варианты 1-25) Генератор постоянного тока с параллельным возбуждением отдает полезную мощность Р2 при напряжении Uн Генератор нагружен на нагрузку Rн. Сопротивление обмотки якоря Rя, обмотки возбуждения Rв, КПД генератора η. Ток в нагрузке Iн, ток в цепи якоря Iя, в обмотке возбуждения Iв. Эдс генератора Е. Генератор приводится во вращение двигателем мощностью Р1. Потери мощности в цепи якоря Ря, в обмотке возбуждения Рв, суммарные потери мощности ΣР. Кпд генератора η. Определить величины указанные прочерками в таблице вариантов. Пояснить причины снижения напряжения на выводах с ростом нагрузки.
Данные выбрать из таблицы 8.1.
Задача 8.Варианты 25-50) Двигатель постоянного тока параллельным возбуждением развивает полезную мощность на валу Р2, потребляя сети ток I при напряжении Uн. Ток в цепи якоря Iя, в обмотке возбуждения Iв. Частота вращения якоря n. Двигатель потребляет из сети мощность Р1.Полезный вращающий момент на валу М. В якоре двигателя наводится противо – эдс Е. Сопротивление обмотки якоря Rя, обмотки возбуждения Rв, Потери мощности в цепи якоря Ря, в обмотке возбуждения Рв, суммарные потери мощности ΣР, кпд η. Определить величины указанные прочерками в таблице вариантов. Пояснить возбуждение протво- эдс в обмотке якоря.
Данные выбрать из таблицы 8.2.
| Вар- иант | Р1 кВт | Р2 кВт | ƩР кВт | µ | U B | I A | E B | Iа А | Iв А | Rа Ом | Rв Ом | Pа Вт | Pв Вт | Rн Ом |
| 2,55 | ‒ | ‒ | ‒ | ‒ | 2,9 | ‒ | ‒ | ‒ | ‒ | ‒ | ||||
| ‒ | 4,0 | ‒ | ‒ | ‒ | ‒ | ‒ | 0,05 | 57,5 | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | 0,07 | 19,1 | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | 0,72 | |||||
| ‒ | ‒ | ‒ | ‒ | ‒ | 0,006 | ‒ | ‒ | ‒ | ‒ | |||||
| ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | 0,082 | ‒ | ‒ | ‒ | |||||
| ‒ | ‒ | 0,86 | ‒ | ‒ | ‒ | ‒ | 7,6 | 0,084 | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | 32,5 | ‒ | ‒ | ‒ | ‒ | 0,01 | 8,5 | ‒ | ‒ | ‒ | |||
| 25,9 | ‒ | 2,6 | ‒ | ‒ | ‒ | 2,3 | ‒ | ‒ | ‒ | ‒ | ‒ | |||
| ‒ | 9,2 | ‒ | 0,86 | ‒ | ‒ | 1,44 | ‒ | ‒ | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | ‒ | 0,89 | ‒ | ‒ | ‒ | 0,03 | 39,7 | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | 0,011 | 9,6 | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | ‒ | 0,88 | 119,5 | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | ‒ | ‒ | 7,8 | ‒ | ‒ | ‒ | ‒ | ‒ | |||||
| ‒ | 5,6 | ‒ | 0,81 | ‒ | ‒ | ‒ | 27,5 | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | 0,87 | ‒ | 122,5 | ‒ | ‒ | ‒ | 0,08 | ‒ | ‒ | ||||
| ‒ | ‒ | 1,8 | ‒ | ‒ | ‒ | ‒ | 0,07 | 18,2 | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | ‒ | 0,88 | 69,6 | ‒ | ‒ | 1,53 | 0,128 | ‒ | ‒ | ‒ | ‒ | ||
| ‒ | ‒ | 0,88 | ‒ | ‒ | ‒ | ‒ | 38,33 | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | 0,90 | ‒ | ‒ | ‒ | 7,8 | 0,02 | ‒ | ‒ | ‒ | ‒ | |||
| ‒ | 5,5 | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | ‒ | |||||
| 4,5 | 3,6 | ‒ | ‒ | ‒ | ‒ | ‒ | 0,25 | ‒ | ‒ | ‒ | ‒ | |||
| ‒ | ‒ | ‒ | 0,79 | 17,4 | ‒ | ‒ | ‒ | 14,4 | ‒ | ‒ | ‒ | |||
| 55,5 | ‒ | ‒ | ‒ | ‒ | ‒ | 0,04 | ‒ | ‒ | ‒ | ‒ | ||||
| ‒ | ‒ | ‒ | 0,84 | ‒ | 3,76 | ‒ | ‒ | ‒ | ‒ | ‒ |

Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Содержание
- Электродвигатель постоянного тока
- Основные параметры электродвигателя постоянного тока
- Постоянная момента
- Постоянная ЭДС
- Постоянная электродвигателя
- Жесткость механической характеристики двигателя
- Напряжение электродвигателя
- Мощность электродвигателя постоянного тока
- Механическая постоянная времени
- Что такое номинальный ток электродвигателя – советы электрика
- Номинальный ток асинхронных двигателей
- Высокий стартовый ток – главный недостаток асинхронного электродвигателя
- Расчет номинального значения тока асинхронного электродвигателя
- Расчет номинального тока электродвигателя, Заметки электрика
- Ток электродвигателя, какую силу тока потребляет двигатель при пуске и работе. Как узнать пусковой и номинальный ток электромотора, движка
- Тема: способы нахождения и вычисления электрических токов движка
- Расчет тока электродвигателя
- Как определить ток электродвигателя на практике
- Как определить мощность электродвигателя?
- Методика определения мощности электродвигателя
- Методика определения тока электродвигателя
- Как подобрать автоматический выключатель для двигателя
- Большая Энциклопедия Нефти и Газа
- Выбор электродвигателя по типу, мощности и другим параметрам
- Типы двигателей
- Электродвигатели постоянного и переменного тока
- Синхронные электродвигатели
- Асинхронные электродвигатели
- Вентильные электродвигатели
- Мощность электродвигателя
- Пусковой ток электродвигателя
- Режимы работы электродвигателей
- Климатические исполнения электродвигателей
- Энергоэффективность
- Вопросы-ответы по электродвигателям
Электродвигатель постоянного тока
Основные параметры электродвигателя постоянного тока
Постоянная момента
 ,
,
- где M — момент электродвигателя, Нм,
 – постоянная момента, Н∙м/А,
– постоянная момента, Н∙м/А,- I — сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
 ,
,
- где
 — электродвижущая сила, В,
— электродвижущая сила, В,  – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — угловая частота, рад/с
— угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
 ,
,
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
Жесткость механической характеристики двигателя
 ,
,
- где
 — жесткость механической характеристики электродвигателя постоянного тока
— жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
 ,
,
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:

Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:

- где I – сила тока, А
- U — напряжение, В,
- M — момент электродвигателя, Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — механическая мощность (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где
 — механическая постоянная времени, с
— механическая постоянная времени, с
Источник
Что такое номинальный ток электродвигателя – советы электрика
Номинальный ток асинхронных двигателей

Подавляющее большинство электродвигателей, используемых в промышленности, относятся к трехфазному асинхронному типу. Для питания таких устройств необходима промышленная трехфазная сеть переменного тока, обеспечивающая сетевое напряжение заданной частоты и напряжения.
Высокая популярность асинхронных электродвигателей обусловлена дешевизной, простотой изготовления и механической прочностью данных устройств.
Кроме того, изменяя схему подключения обмоток (звезда или треугольник) можно подключать двигатель к сетям различного напряжения (обычно используются комбинации 220/380 и 127/220В).
Высокий стартовый ток – главный недостаток асинхронного электродвигателя
Однако несмотря на множество неоспоримых преимуществ, асинхронные двигатели имеют минусы, среди которых одним из наиболее значительных является достаточно большой пусковой ток электродвигателя данного типа.
Особенно заметен этот недостаток в асинхронных устройствах с короткозамкнутым ротором.
Такие двигатели следует с осторожностью применять, в тех системах, для которых требуется значительный пусковой момент, который может привести к превышению номинального значения силы тока (Iн).
Для большинства асинхронных электродвигателей допустимо кратковременное превышение значение Iн, которое может произойти в момент пуска.
Так, в момент запуска, допускается шестикратное превышение значения номинального тока при условии, что оно будет длиться не более 5 секунд.
В случае, если в некотором режиме номинальный ток превышается не более чем в два раза, допускается увеличить время работы устройства в этом режиме до 15 секунд.
Расчет номинального значения тока асинхронного электродвигателя
Номинальный ток электродвигателя, при котором возможна его длительная работа, связан с номинальной мощностью устройства и его КПД следующим выражением: Iн=1000*Pн/(Uн*cosφ√η), где Рн – мощность, Uн – номинальное напряжение, которым питается электродвигатель, η – КПД, а cosφ – коэффициент мощности двигателя.
Отсюда можно сделать важный вывод, который состоит в том, что при уменьшении U (например при переключении устройства из сети в 220 В сеть 127 В), увеличивается ток двигателя, который может превысить номинальное значение.
А длительная работа двигателя на токе I>Iн может привести не только к его повреждению, но и к возгоранию.
Поэтому, используемые в системе с электрическим двигателем предохранительные устройства должны быть подобраны так, чтобы предотвратить продолжительную работу при токе I>Iн.
Расчет номинального тока электродвигателя, Заметки электрика

Здравствуйте, уважаемые читатели и гости сайта «Заметки электрика».
Решил написать статью о расчете номинального тока для трехфазного электродвигателя.
Этот вопрос является актуальным и кажется на первый взгляд не таким и сложным, но почему-то в расчетах зачастую возникают ошибки.
В качестве примера для расчета я возьму трехфазный асинхронный двигатель АИР71А4 мощностью 0,55 (кВт).
Вот его внешний вид и бирка с техническими данными.
Если двигатель Вы планируете подключать в трехфазную сеть 380 (В), то значит его обмотки нужно соединить по схеме «звезда», т.е. на клеммнике необходимо соединить выводы V2, U2 и W2 между собой с помощью специальных перемычек.
При подключении этого двигателя в трехфазную сеть напряжением 220 (В) его обмотки необходимо соединить треугольником, т.е. установить три перемычки: U1-W2, V1-U2 и W1-V2.
Если же Вы решите подключить этот двигатель в однофазную сеть 220 (В), то его обмотки также должны быть соединены треугольником.
Для правильного выбора автоматического выключателя (или предохранителей) и тепловых реле для защиты двигателя, а также для выбора контактора для его управления, в первую очередь нам нужно знать номинальный ток двигателя для конкретной схемы соединения обмоток.
Обычно, номинальные токи указаны прямо на бирке, поэтому можно смело ориентироваться на них. Но иногда циферки не видны или стерты, а известна только лишь мощность двигателя или другие его параметры.
Такое очень часто встречается, но еще чаще бирка вообще отсутствует или так затерта, что на ней абсолютно ничего не видно — приходится только догадываться, что там изображено.
Но это отдельный случай и что делать в таких ситуациях, я расскажу Вам в ближайшее время.
В данной же статье я хочу акцентировать Ваше внимание на формулу по расчету тока двигателя, потому что даже не все «специалисты» ее знают, хотя может и знают, но не хотят вспомнить основы электротехники.
Внимание! Мощность на шильдике двигателя указывается не электрическая, а механическая, т.е. полезная механическая мощность на валу двигателя. Об этом отчетливо говорится в действующем ГОСТ Р 52776-2007, п.5.5.3:
Полезную механическую мощность обозначают, как Р2.
Чаще всего мощность двигателя указывают не в ваттах (Вт), а в киловаттах (кВт). Для тех кто забыл, читайте статью о том, как перевести ватты в киловатты и наоборот.
Еще реже, на бирке указывают мощность в лошадиных силах (л.с.), но такого я ни разу еще не встречал на своей практике. Для информации: 1 (л.с.) = 745,7 (Ватт).
Но нас интересует именно электрическая мощность, т.е. мощность, потребляемая двигателем из сети. Активная электрическая мощность обозначается, как Р1 и она всегда будет больше механической мощности Р2, т.к. в ней учтены все потери двигателя.
К механическим потерям относятся трение в подшипниках и вентиляция. Их величина напрямую зависит от оборотов двигателя, т.е. чем выше скорость, тем больше механические потери.
У асинхронных трехфазных двигателей с фазным ротором еще учитываются потери между щетками и контактными кольцами. Более подробно об устройстве асинхронных двигателей Вы можете почитать здесь.
Магнитные потери возникают в «железе» магнитопровода. К ним относятся потери на гистерезис и вихревые токи при перемагничивании сердечника.
Величина магнитных потерь в статоре зависит от частоты перемагничивания его сердечника. Частота всегда постоянная и составляет 50 (Гц).
Магнитные потери в роторе зависят от частоты перемагничивания ротора. Эта частота составляет 2-4 (Гц) и напрямую зависит от величины скольжения двигателя. Но магнитные потери в роторе имеют малую величину, поэтому в расчетах чаще всего не учитываются.
3. Электрические потери в статорной обмотке (Рэ1)
Электрические потери в обмотке статора вызваны их нагревом от проходящих по ним токам. Чем больше ток, чем больше нагружен двигатель, тем больше электрические потери — все логично.
4. Электрические потери в роторе (Рэ2)
Электрические потери в роторе аналогичны потерям в статорной обмотке.
5. Прочие добавочные потери (Рдоб.)
К добавочным потерям можно отнести высшие гармоники магнитодвижущей силы, пульсацию магнитной индукции в зубцах и прочее. Эти потери очень трудно учесть, поэтому их принимают обычно, как 0,5% от потребляемой активной мощности Р1.
Все Вы знаете, что в двигателе электрическая энергия преобразуется в механическую. Если объяснить чуть подробнее, то при подведенной к двигателю электрической активной мощности Р1, некоторая ее часть затрачивается на электрические потери в обмотке статора и магнитные потери в магнитопроводе.
Затем остаточная электромагнитная мощность передается на ротор, где она расходуется на электрические потери в роторе и преобразуется в механическую мощность. Часть механической мощности уменьшается за счет механических и добавочных потерь.
В итоге, оставшаяся механическая мощность — это и есть полезная мощность Р2 на валу двигателя.
Все эти потери и заложены в единственный параметр — коэффициент полезного действия (КПД) двигателя, который обозначается символом «η» и определяется по формуле:
Кстати, КПД примерно равен 0,75-0,88 для двигателей мощностью до 10 (кВт) и 0,9-0,94 для двигателей свыше 10 (кВт).
Еще раз обратимся к данным, рассматриваемого в этой статье двигателя АИР71А4.
На его шильдике указаны следующие данные:
- тип двигателя АИР71А4
- заводской номер № ХХХХХ
- род тока — переменный
- количество фаз — трехфазный
- частота питающей сети 50 (Гц)
- схема соединения обмоток ∆/Y
- номинальное напряжение 220/380 (В)
- номинальный ток при треугольнике 2,7 (А) / при звезде 1,6 (А)
- номинальная полезная мощность на валу Р2 = 0,55 (кВт) = 550 (Вт)
- частота вращения 1360 (об/мин)
- КПД 75% (η = 0,75)
- коэффициент мощности cosφ = 0,71
- режим работы S1
- класс изоляции F
- класс защиты IP54
- название предприятия и страны изготовителя
- год выпуска 2007
В первую очередь необходимо найти электрическую активную потребляемую мощность Р1 из сети по формуле:
Р1 = Р2/η = 550/0,75 = 733,33 (Вт)
Величины мощностей подставляются в формулы в ваттах, а напряжение — в вольтах. КПД (η) и коэффициент мощности (cosφ) — являются безразмерными величинами.
Но этого не достаточно, потому что мы не учли коэффициент мощности (cosφ), а ведь двигатель — это активно-индуктивная нагрузка, поэтому для определения полной потребляемой мощности двигателя из сети воспользуемся формулой:
S = P1/cosφ = 733,33/0,71 = 1032,85 (ВА)
Найдем номинальный ток двигателя при соединении обмоток в звезду:
Iном = S/(1,73·U) = 1032,85/(1,73·380) = 1,57 (А)
Найдем номинальный ток двигателя при соединении обмоток в треугольник:
Iном = S/(1,73·U) = 1032,85/(1,73·220) = 2,71 (А)
Как видите, получившиеся значения равны токам, указанным на бирке двигателя.
Для упрощения, выше приведенные формулы можно объединить в одну общую. В итоге получится:
Поэтому, чтобы определить номинальный ток двигателя, необходимо в данную формулу подставлять механическую мощность Р2, взятую с бирки, с учетом КПД и коэффициента мощности (cosφ), которые указаны на той же бирке или в паспорте на электродвигатель.
Ток двигателя при соединении обмоток в звезду:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·380·0,71·0,75) = 1,57 (А)
Ток двигателя при соединении обмоток в треугольник:
Iном = P2/(1,73·U·cosφ·η) = 550/(1,73·220·0,71·0,75) = 2,71 (А)
Надеюсь, что все понятно.
Решил привести еще несколько примеров с разными типами двигателей и мощностями. Рассчитаем их номинальные токи и сравним с токами, указанными на их бирках.
1. Асинхронный двигатель 2АИ80А2ПА мощностью 1,5 (кВт)
Как видите, этот двигатель можно подключить только в трехфазную сеть напряжением 380 (В), т.к. его обмотки собраны в звезду внутри двигателя, а в клеммник выведено всего три конца, поэтому:
Iном = P2/(1,73·U·cosφ·η) = 1500/(1,73·380·0,85·0,82) = 3,27 (А)
Полученный ток 3,27 (А) соответствует номинальному току 3,26 (А), указанному на бирке.
2. Асинхронный двигатель АОЛ2-32-4 мощностью 3 (кВт)
Данный двигатель можно подключать в трехфазную сеть напряжением, как на 380 (В) звездой, так и на 220 (В) треугольником, т.к. в клеммник у него выведено 6 концов:
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·380·0,83·0,83) = 6,62 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 3000/(1,73·220·0,83·0,83) = 11,44 (А) — треугольник
Полученные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на бирке.
3. Асинхронный двигатель АИРС100А4 мощностью 4,25 (кВт)
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·380·0,78·0,82) = 10,1 (А) — звезда
Iном = P2/(1,73·U·cosφ·η) = 4250/(1,73·220·0,78·0,82) = 17,45 (А) — треугольник
Расчетные значения токов при разных схемах соединения обмоток соответствуют номинальным токам, указанных на шильдике двигателя.
4. Высоковольтный двигатель А4-450Х-6У3 мощностью 630 (кВт)
Этот двигатель можно подключить только в трехфазную сеть напряжением 6 (кВ). Схема соединения его обмоток — звезда.
Iном = P2/(1,73·U·cosφ·η) = 630000/(1,73·6000·0,86·0,947) = 74,52 (А)
Расчетный ток 74,52 (А) соответствует номинальному току 74,5 (А), указанному на бирке.
Представленные выше формулы это конечно хорошо и по ним расчет получается более точным, но есть в простонародье более упрощенная и приблизительная формула для расчета номинального тока двигателя, которая наибольшее распространение получила среди домашних умельцев и мастеров.
Все просто. Берете мощность двигателя в киловаттах, указанную на бирке и умножаете ее на 2 — вот Вам и готовый результат. Только данное тождество уместно для двигателей 380 (В), собранных в звезду. Можете проверить и поумножать мощности приведенных выше двигателей. Но лично я же настаиваю Вам использовать более точные методы расчета.
Ток электродвигателя, какую силу тока потребляет двигатель при пуске и работе. Как узнать пусковой и номинальный ток электромотора, движка

Тема: способы нахождения и вычисления электрических токов движка
Производители на самом корпусе электрических двигателей ставят металлическую табличку, на которой написаны основные характеристики данного электродвигателя.
На этой табличке указан и ток, который потребляет данная электрическая машина при своей номинальной работе (средне допустимой, с нормальной нагрузкой на валу двигателя).
Данная надпись может иметь два значения, например 5,9/3,4А, что означает – при подключении двигателя в режиме «треугольник» номинальные ток будет равен 5,9 ампер, а при подключении в режиме «звезда» он будет 3,4 ампера.
На этой же табличке можно увидеть и символы, указывающие данные режимы работы.
Если по каким-то причинам на корпусе электродвигателя нет надписи, какую номинальную силу тока он потребляет, то ток можно вычислить по следующей формуле (если конечно известны все остальные, имеющиеся в этой формуле, величины!):
При отсутствии металлической таблички с основными характеристиками на корпусе электрического двигателя можно пойти более простым путем, чтобы узнать приближенную силу тока, потребляемой движком.
Если известна номинальная мощность двигателя, то применим следующее условие – «киловатт электрической мощности равен двум амперам тока» (это условие подходит для электродвигателей с мощностью от 3-х киловатт и более, то есть будет максимально приближенным).
Например, у нас есть асинхронный электрический двигатель мощностью 5 кВт (5000 ватт). Следовательно, приближенное значение потребляемого тока будет около 10 ампер. Может возникнуть небольшая непонятка. Если воспользоваться простой формулой вычисления тока, зная мощность и напряжение: 5000 ватт / 380 вольт = 13,15 ампер.
Но ведь у электродвигателей есть свой коэффициент полезного действия, который вовсе не равен 100% и косинус фи, который также меньше единицы. Вот мы и получаем, что реальная сила тока будет ближе к значению 10 ампер, а не 13,15 ампер.
Практическим вариантом узнать значение силы тока, который потребляется электродвигателем при его номинальной работе, будет использование обычного амперметра, или токоизмерительных клещей.
При уверенности в том, что наш электродвигатель точно рассчитан на то напряжение, что мы собираемся на него подать, мы даем питание на него. Далее, все просто, берем токоизмерительные клещи и измеряем силу тока на проводах, что питают наш электродвигатель.
Причем еще стоит обратить внимание на то, что у трехфазного электродвигателя рабочие токи должны быть одинаковыми на всех трех фазах.
Если Вы вдруг обнаружили факт неодинаковости, то причиной может быть, как перекос фаз электрического питания, так и неисправности самого электродвигателя, который может в скором времени вовсе выйти из строя из-за ненормального режима своей работы. В любом случае желательно выяснить причину неодинаковости значений силы тока на проводах.
Помимо номинального тока, который потребляется электродвигателем при нормальной своей работе, существует еще так называемый пусковой ток. Его величина может быть превышать номинальный ток аж в 3-8 раз.
То есть, когда мы подаем питание на электрический двигатель, который до этого находился в состоянии покоя, в начальный момент по его обмоткам начинает протекать увеличенный ток по причине нескомпенсированности сил электромагнитных полей внутри двигателя. Чем быстрее электродвигатель начинает вращаться, тем меньше тока он начинает потреблять.
То есть, пусковым током считается то значение электрического тока, которое существует с момента включения электродвигателя и до выхода его на свои номинальные обороты (время разгона двигателя от нуля до нормального значения).
Минимальный ток, что будет течь через обмотки электрического двигателя, будет тогда, когда движок работает на холостом ходу (то есть, к его валу не подсоединено ни одной механической нагрузки).
Следовательно, чем сильнее мы нагрузим вал двигателя, тем большую силу тока начнет он потреблять.
Номинальной нагрузкой считается та, на которую изначально данный электродвигатель был рассчитан при своем изготовлении, и при которой эта электрическая машина может работать продолжительное время без вреда для себя.
Имеется также понятие о максимальной нагрузке, при которой сила тока, что потребляется двигателем, находится на предельно допустимом значении. При максимальных токах электродвигатели могут работать лишь незначительный промежуток времени, поскольку длительная работа может негативно влиять на сам движок (перегрев), сокращая его общий срок службы.
Пусковые токи у разных электродвигателей разные, их можно посмотреть в справочных таблицах, где прописаны характеристики каждого конкретного движка. Для чего нужно знать значение пусковых токов? Для того, чтобы правильно подобрать устройства защиты для электрических цепей, которые непосредственно относятся к схеме этого электрического двигателя.
Например, зная конкретную величину пускового тока мы правильно можем подобрать тепловую защиту под него, автоматически выключатель, что отвечает за включение и выключение данного двигателя и т.д.
Это избавит нас от таких проблем как постоянное срабатывание токовой защиты (если устройство рассчитано на меньший ток, чем нужно) или не срабатывание тогда, когда это нужно (если ток срабатывания устройства гораздо больше нужного).
Большие пусковые токи – это негативное явление, которое на короткий промежуток времени создает просадку питающей сети. В этой электросети возникает кратковременное падение напряжения.
Как можно уменьшить пусковые токи электродвигателя? Первый вариант (классический), это запускать электродвигатель по схеме «звезда», а спустя некоторое время переключаться на схему «треугольник».
В этом случае при включении начальный, пусковой ток будет относительно небольшой, а при переключении режима в «треугольник» движок выйдет на свои номинальные обороты.
Иными вариантами снижения пусковых токов электродвигателя являются использование различных устройств плавного пуска, которые за счет электронных схем контролируют начальный режим разгона электрической машины. Допустим при использовании преобразователей частоты можно легко задать нужные параметры для старта и последующий работы электрического двигателя.
P.S. Правильные режим работы любого электродвигателя способствует увеличению общего срока службы данного электротехнического устройства, а также щадящей работе тех электрических цепей, что относятся к питанию данного устройства (включая и саму питающую сеть).
Расчет тока электродвигателя

Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя.
Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать.
Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.
Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
На этом у меня всё. Пока.
С уважением Александр!
Как определить мощность электродвигателя?

Электрические двигатели сегодня используются в различных технических средствах и оборудовании, потому многих пользователей интересует, как определить мощность и ток электродвигателя? Производители двигателей оснащают свои товары специальными таблицами, устанавливаемыми на корпусах устройств. Эти таблички содержат в себе исчерпывающую информацию о технических характеристиках устройства: марка, номинальный рабочий ток, мощность, частота вращения, КПД, тип двигателя и т.д. Все эти данные содержатся также в технической документации на электродвигатели.
Из всех характеристик двигателей, для пользователей наибольшее значение имеют потребляемый ток и мощность. Эти данные позволяют определить сечение и пропускную способность электрических кабелей, которые необходимо использовать для подключения оборудования, выбрать подходящие по номиналам устройства безопасности – УЗО и автомат.
Несмотря на то, что в большинстве случаев с поиском технических характеристик двигателей не возникает никаких проблем, иногда техническая документация и таблички на устройствах отсутствуют. Подобные проблемы вынуждают пользователей искать другие варианты определения мощности, тока и других параметров работы электродвигателя.
Методика определения мощности электродвигателя
Существуют различные формулы расчета, позволяющие определить точную мощность электродвигателя. Для использования некоторых формул пользователю придется измерить размеры статора двигателя, для других формул – нужно знать величину тока или КПД двигателя.
Многие специалисты используют эти формулы на практике, но существует и гораздо более простая, удобная методика определения мощности двигателя – практические измерения.
С помощью установленного счетчика потребления электрической энергии в бытовой электросети можно узнать мощность любого оборудования.
Для проведения таких измерений нужно будет отключить от питания все бытовые электрические устройства, чтобы ни один прибор не потреблял электрическую энергию и счетчик «не крутился». Освещение также необходимо отключить, так как даже одна включенная лампочка может навредить испытаниям.
Особенности определения мощности зависят от того, какой именно счетчик потребления электроэнергии у вас установлен. Если на вводе электричества на объект установлен счетчик «Меркурий», достаточно просто включить электродвигатель на полной мощности на 3-5 минут. В процессе работы двигателя счетчик будет показывать величину нагрузки, измеряемую в кВт.
Провести такие измерения можно и с помощью стандартного индукционного счетчика потребления, но нужно помнить, что такие устройства ведут учет в Квт/ч. Итак, сначала нужно записать точные показателя счетчика до начала исследования, затем нужно включить двигатель ровно на 10 минут, не допуская никаких погрешностей.
Лучше всего засекать время с помощью секундомера, позволяющего вовремя включить и выключить двигатель. После выключения двигателя нужно снять показания с индукционного счетчика, отнять из показаний записанную перед измерениями величину. Теперь показатели умножаем на 6.
Полученные в ходе этих простых измерений и вычислений результаты будут точно отображать активную мощность двигателя в кВт.
Сложнее определить технические характеристики маломощных двигателей, но и их мощность можно рассчитать, хотя это потребует больших усилий. Легче всего определить мощность двигателя путем подсчета полных оборотов диска за единицу времени. К примеру, на счетчике указано, что 1200 оборотов равняется 1 кВт/ч.
Если в течение одной минуты счетчик сделает 10 оборотов, то в этом случае 10 нужно умножить на 60 (число минут в часе) и получаем 600 оборотов в час. Делим 1200 на 600 и получаем мощность электродвигателя. Важно отметить, что на точность напрямую влияет продолжительность измерений.
Чем дольше измерять показания, тем точнее можно определить мощность двигателя.
Методика определения тока электродвигателя
Для эксплуатации электродвигателя пользователю требуются различные параметры его работы. Второй по важности характеристикой такого устройства является величина потребляемого тока. Методика расчета тока зависит от числа фаз в двигателе и величине потребляемого напряжения.
Проще всего рассчитать величину тока для трехфазных двигателей, подключаемых от электрических сетей напряжением 380 В. Величина потребляемого тока для таких устройств равняется умноженной на 2 мощности.
К примеру, трехфазный двигатель мощностью 2 кВт умножаем на 2 и получаем потребляемый ток двигателя, равный 4 Ампер.
Величина тока электродвигателя в момент времени может зависеть от вида запуска. Зависимость величины тока от вида запуска представлена на графике ниже.
Это точная формула, однако, требующая определенных дополнений. Обязательно нужно учитывать, что результат таких расчетов – это величина потребляемого тока при номинальной нагрузке. Двигатель на холостом ходу будет иметь куда меньшую величину потребляемого тока.
Для расчета тока трехфазного асинхронного двигателя можно также использовать формулу:
Iн = 1000 Pн / √3 * (ηн * Uн * cosφн),
- Pн – номинальная мощность;
- Uн – номинальное напряжение;
- Ηн – номинальный КПД;
- Cosφн – номинальный коэффициент мощности.
Потребляемый ток однофазными двигателями рассчитывается по другой формуле. В этом случае для определения тока пользователю нужно будет разделить мощность двигателя на напряжение в электросети. Уровень напряжения в месте подключения двигателя необходимо измерить перед проведением расчетов, так как уровень напряжения при включенном устройстве в месте ввода будет снижаться.
Таким образом, если мощность мотора равняется 2 кВт или 2000 Вт, а напряжение в сети равняется 220 В, то 2000 следует разделить на 220. Получаем величину в 9 А, которая и принимается за величину потребляемого тока электродвигателем.
Как подобрать автоматический выключатель для двигателя

Правильный подбор автоматического выключателя для защити электродвигателя имеет огромное значение для оборудования. Надежность работы, защита двигателя от аварийных режимов работы и проводки напрямую зависит от подбора автоматического выключателя.
В этой статье наведем условия выбора автоматического выключателя для защиты электродвигателя. Для того чтобы выбрать автоматический выключатель необходимо знать:
— номинальный ток двигателя;
— кратность пускового тока к номинальному;
— максимально допустимый ток электропроводки.
Номинальный ток двигателя – это ток который имеет электродвигатель во время работы при номинальной мощности. Он указывается на паспорте электродвигателе или берется с таблиц паспортных данных электродвигателей.
Кратность пускового тока к номинальному – это соотношение пускового ток который возникает в электродвигателе во время пуска к номинальному. Он тоже указывается на паспорте электродвигателя или в таблицах электродвигателей.
Максимально допустимый ток электропроводки – это допустимый ток, который может проходить по проводу, кабеля, что подключен к электродвигателю.
Условия для правильного выбора автоматического выключателя для защиты электродвигателя:
— номинальный ток автоматического выключателя должен бить больше или равен номинальному току электродвигателя. Например: ток электродвигателя АИР112М4У2 Ін. дв. =11,4А выбираем автоматический выключатель ВА51Г2534 на номинальный ток Ін. = 25А и ток расцепителя Ін..рас. = 12.5А.
После этого проверим автоматический выключатель на не срабатывания при пуске электродвигателя используя условие :
Iу.е.>kзап. · kр.у ·kр.п. ·Iн.дв ·kі
где Kзап . — коэффициент запаса, который учитывает колебания напряжения, Kзап . = 1,1 ;
kр.у — коэффициент, который учитывает неточность вставки по току срабатывания электромагнитного расцепителя автоматического выключателя , Kр.у = 1,2 ;
kр.п. — коэффициент, который учитывает возможное отклонение пускового тока от его номинального, kр.п. = 1,2 ;
K і — каталожная кратность пускового тока электродвигателя;
Iн.дв — номинальный ток двигателя , А.
Iу.е = 14 · Iн.рос = 14 · 12,5 = 175А
З таблицы электродвигателей находим K і = 7,0 для электродвигателя АИР112М4У2.
Подставляем в условие и определяем
Условие выполнилось, следовательно, автоматический выключатель не сработает при запуске двигателя.
— номинальный ток автоматического выключателя должен быть меньше предельно допустимого тока кабеля которым питается электродвигатель. Например: подключение сделано кабелем АВРГ (3х2,5) который имеет допустимый ток Iдоп =27А. Для водного автомата для защиты электродвигателя условие выполняется потому, что Iдоп =27А > Ін. = 25А .
В этой статье вы узнали как правильно, используя условия выбора правильно подобрать автоматический выключатель для защиты электродвигателя.
Большая Энциклопедия Нефти и Газа

Номинальные токи электродвигателей: I mv Pi / ( U ш мХ X cos cpi ом) 9200Д ПО – 0 75) 1 1 1 52 A; h ном Ядз / ( Ш X XCOS – OM) 17 318Д1 10 – 0 9) 174 85 А. [1]
Номинальный ток электродвигателя, измеряемый в конце заводки рабочих пружин при максимальном моменте на валу привода, при UHOM на ПО В постоянного и 127 В переменного тока составляет по 5 А; на 220 В постоянного и переменного тока 2 5 А. [2]
Эл – номинальный ток электродвигателя; / 0 – ток нулевой уставки реле; с – цена деления, равная 0 05 для открытых пускателей и 0 055 – для защищенных. [3]
Здесь / н – номинальный ток электродвигателя; / – текущее значение тока ( соответствующее моменту времени ti); to – время паузы за цикл; р – коэффициент ухудшения условий охлаждения при стоянке. [4]
Тепловые реле выбирают пономинальным токам электродвигателей с учетом того, что тепловое реле нужно выбирать по току, соответствующему мощности двигателя, при которой его можно применять как двигатель повышенной надежности против взрыва. [5]
Тепловые реле выбирают пономинальному току электродвигателя. [6]
Выбор тепловых реле производят пономинальному току электродвигателя. [7]
Выбор тепловых реле производится пономинальным токам электродвигателей с учетом того, что тепловое реле нужно выбирать по току, соответствующему мощности двигателя, при которой его можно применять как двигатель повышенной надежности против взрыва. При этом перегрузки электродвигателя не допускаются. [8]
Выбор тепловых реле производят пономинальным токам электродвигателей. Особенностью выбора тепловых реле электродвигателе й, приведенных в табл.
60, а также электродвигателей, применение которых обусловлено решением Госэнергонадзора № 36 – 30 от 22 января 1965 г.
, является то, что тепловые реле нужно выбирать по току, соответствующему мощности электродвигателя, при которой его можно применять как двигатель повышенной надежности против взрыва. [9]
Ток 1С 5 а являетсяноминальным током электродвигателя мощностью 8 кет. [10]
Магнитные пускатели и контакторы выбирают пономинальному току электродвигателя с учетом условий эксплуатации. В промышленности применяются магнитные пускатели серий ПМЕ и ПМЛ с прямоходовыми контакторами и серии ПАЕ с подвижной системой поворотного типа. [11]
Нагревательные элементы выбираются в соответствии сноминальным током электродвигателя. [12]
Номинальный ток теплового расцепителя должен быть неменьше номинального тока защищаемого электродвигателя. [13]
При значительном понижении напряжения ток статора может существенно превыситьноминальный ток электродвигателя; еще более резко будет перегружена обмотка ротора. Вследствие этого длительная работа нагруженных асинхронных электродвигателей с напряжением, меньшим 0 95 UIH, недопустима. [15]
Выбор электродвигателя по типу, мощности и другим параметрам

Типы электродвигателей
По виду питающего тока
Синхронные электродвигатели
Асинхронные электродвигатели
Вентильные электродвигатели
Расчет мощности
Расчет пускового тока
Режимы работы
Климатическое исполнение
Энергоэффективность
Электродвигатель – механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- вид электрического тока, питающего оборудование;
- мощность электродвигателя;
- режим работы;
- климатические условия и другие внешние факторы.
Типы двигателей
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:
где:Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса
где:K3 – коэффициента запаса, он равен 1,1-1,3;g –ускорение свободного падения;Q – производительность насоса;H – высота подъема (расчетная);Y – плотность перекачиваемой насосом жидкости;ηнас – КПД насоса;
ηп – КПД передачи.
Давление насоса рассчитывается по формуле:
Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:
где:Q – производительность компрессора;ηk – индикаторный КПД поршневого компрессора (0,6-0,8);ηп – КПД передачи (0,9-0,95);
K3 – коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:
или взять из таблицы
| sub>2, 105Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10-3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов
где:
K3 – коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт – коэффициент 2;
- от 1 до 2 кВт – коэффициент 1,5;
- 5 и более кВт – коэффициент 1,1-1,2.
Q – производительность вентилятора;H – давление на выходе;ηв – КПД вентилятора;
ηп – КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов – 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
ВАЖНО! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока
Номинальный ток трехфазных электродвигателей переменного тока
где:PH – номинальная мощность электродвигателя;UH — номинальное напряжение электродвигателя,ηH — КПД электродвигателя;
cosfH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей
где:IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями.
В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды.
При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Климатические исполнения электродвигателей
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
- У – модели для эксплуатации в умеренном климате;
- ХЛ – электродвигатели, адаптированные к холодному климату;
- ТС – исполнения для сухого тропического климата;
- ТВ – исполнения для влажного тропического климата;
- Т – универсальные исполнения для тропического климата;
- О – электродвигатели для эксплуатации на суше;
- М – двигатели для работы в морском климате (холодном и умеренном);
- В – модели, которые могут использоваться в любых зонах на суше и на море.
Цифры в номенклатуре модели указывают на тип ее размещения:
- 1 – возможность эксплуатации на открытых площадках;
- 2 – установка в помещениях со свободным доступом воздуха;
- 3 – эксплуатация в закрытых цехах и помещениях;
- 4 – использование в производственных и других помещениях с возможностью регулирования климатических условий (наличие вентиляции, отопления);
- 5 – исполнения, разработанные для эксплуатации в зонах повышенной влажности, с высоким образованием конденсата.
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
Другие полезные материалы:
Редуктор от «А» до «Я»
Как выбрать мотор-редуктор
Выбор преобразователя частоты
Подключение и настройка частотного преобразователя
Вопросы-ответы по электродвигателям
 Сессия вопрос-ответ по электродвигателям для частотно-регулируемого привода.До слов”Читать далее” приведены часть вопросов и ответов.
Сессия вопрос-ответ по электродвигателям для частотно-регулируемого привода.До слов”Читать далее” приведены часть вопросов и ответов.
-У меня диапазон регулирования 1:10 подходит ли обычный общепромышленный электродвигатель для работы с преобразователем частоты?
– Условно подходит.
При частотах ниже 25Гц электродвигатель должен работать в повторно-кратковременном режиме с ПВ=25% из-за недостаточной охлаждающей способности вентилятора.Для восьми и более полюсных электродвигателей это значение может быть увеличено до 30 Гц.
-У меня диапазон регулирования 1:20 подходит ли обычный электродвигатель для работы с преобразователем частоты?
–Условно подходит.При частотах ниже 25 Гц электродвигатель должен работать в повторно-кратковременном режиме с ПВ=25% из-за недостаточности охлаждения вентилятором электродвигателя.
-У меня диапазон регулирования 1:50( и выше) подходит ли обычный электродвигатель для работы с преобразователем частоты?
–Нет ,не подходит.Требуется специальный электродвигатель.Например,АДЧР.-Мне надо получить вместо 1400 об/мин 2000 об/мин как мне это сделать?Есть ли какие либо ограничения?
– Можно применить преобразователь частоты задав верхний предел регулирования 100Гц и выставив частоту 66,7 Гц.Момент на валу электродвигателя при этом может упасть(если не применять преобразователи частоты с верхним регулированием типа С2000).Если у вас преобразователь частоты не модели VFD-C,то лучше помощнее выбрать электродвигатель.
– У меня электродвигатель на 400Гц .Как его включить в обычную сеть?
– 400 Гц электродвигатель в обычную сеть включается или через машинный агрегат,или через преобразователь частоты имеющий верхнюю рабочую частоту не ниже 400Гц(преобразователи имеющие на выходе частоту 0-120 Гц не подходят).В большинстве преобразователей частоты напряжение на номинальной частоте регулируется,но надо помнить,что ток через электродвигатель не должен превышать 120% номинального тока преобразователя частоты.Преобразователь частоты подбирается по току электродвигателя.-У меня электродвигатель на 100Гц. Как его включить в обычную сеть?- 100Гц электродвигатель включается в обычную сеть через преобразователь частоты.Настройки такие же как и для 400 Гц электродвигателя.
-У меня трёхфазный электродвигатель на 220 Вольт как его включить в сеть 380 Вольт?
– Такой электродвигатель в сеть 380 Вольт включается или через трёхфазный трансформатор или через преобразователь частоты.При необходимости плавного пуска или регулировки частоты допускается только преобразователь частоты.Преобразователь частоты подбирается по номинальному току электродвигателя.
-У меня трёхфазный электродвигатель на 42 Вольта. Как его включить в сеть 380 Вольт?А в сеть 220 Вольт?
– В сеть 380 Вольт электродвигатель на 42 вольта можно включить или через трёхфазный трансформатор, или через преобразователь частоты,допускающиий установку номинального напряжения ниже 100 Вольт.При этом преобразователь частоты подбирается не по мощности,а по току электродвигателя. В сеть 220 Вольт 42 вольтовый электродвигатель можно включить через преобразователь частоты.Преобразователь частоты выбирается аналогично преобразователю частоты на 380 Вольт.- У меня электродвигатель с тормозом. Как его подключить к преобразователю частоты?
– Для подключения к преобразователю частоты необходимо выделить цепь питания тормоза.Эта цепь пропускается или через контактор или через контакты реле преобразователя частоты.
При питании тормоза 220 Вольт годится и первый и второй способы подключения,а при напряжении 380 вольт только подключение через контактор.
Если в тормозе применена токовая катушка(сопротивление менее 50 Ом),то необходим источник питания рассчитанный исходя из номинального тока электродвигателя и сопротивления катушки.Обычно это 5-10 Вольт.Годится источник постоянного тока.
-У меня трёхфазный электродвигатель. Как его включить в однофазную сеть без потери мощности?
– Существуют два способа включения: через электромашинный агрегат с входным выпрямителем и через преобразователь частоты.Преобразователи частоты выпускаются для включения в однофазную сеть.У большинства фирм преобразователи рассчитаны на электродвигатели до 2,2кВт включительно,а у Omron и Powtran до 5,5 кВт.
– У меня трёхфазный электродвигатель на 380 Вольт.Как его включить в однофазную сеть?
– Существуют два способа включения: через электромашинный агрегат с выпрямителем и через преобразователь частоты VFD-VL.Электромашинный агрегат должен состоять из электродвигателя постоянного тока и генератора на 380 Вольт.Преобразователь частоты VFD-VL допускает питание от сети 220 Вольт в аварийном режме при нижнем значении напряжения сети 200 Вольт(иначе потребуются аккумуляторы с суммарным напряжением 96 Вольт).Преобразователи частоты рассчитаны на электродвигатели с током не менее 4А(2,2кВт)).- Защитит ли преобразователь частоты электродвигатель?
– Да.Защитит если в параметрах по умолчанию включена защита.
– Нужны ли тепловые реле?
– Если на выходе преобразователя частоты один электродвигатель,то не нужны.Если два и более электродвигателя,то все электродвигатели снабжаются тепловыми реле.Контакты тепловых реле выводятся в цепь управления преобразователя частоты и на них запрещено подавать напряжения 220 и 380 Вольт.
– Допускается ли применение контакторов на выходе преобразователя частоты?
– В большинстве моделей не допускается. Если в техническом описании приводится схема с контакторами,то такое включение допускается. При этом управляет контакторами преобразователь частоты. Попадание напряжения 220 и 380 Вольт на выходные цепи преобразователя частоты недопустимо- это приводит к выходу преобразователя частоты из строя.
Источник
Министерство
образования и науки Российской федерации
Федеральное
агентство по образованию
Саратовский
государственный технический университет
Балаковский
институт, техники, технологии и управления
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические
указания к выполнению практической
работы
по
дисциплине «Электромеханические
системы» для студентов
специальности
210100 всех форм обучения
Одобрено
редакционно-издательским
советом
Балаковского
института техники,
технологии
и управления
Балаково 2009
Цель работы: Изучить способы расчета
механических характеристик двигателя
постоянного тока независимого и
последовательного возбуждения.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Расчет механических характеристик
электроприводов с ДПТНВ в основном
режиме. Механические характеристики –
зависимость частоты вращения n
или угловой скорости ω от электромагнитного
момента двигателя n=f(M)
или ω=f(M)
при неизменных значениях других
параметров, способных влиять на частоту
вращения и величину момента двигателя
(напряжение питания, величины тока и
так далее).

Рис.1. Схема двигателя
постоянного тока
Без учета индуктивности якорной цепи

Следует что
Электромагнитный момент
-
 ,
,
Тогда

где ω0 – скорость идеального
холостого хода;
Δω – изменение угловой скорости
относительно скорости холостого хода,
вызванное изменением нагрузки двигателя
(момента на его валу).
Все механические характеристики ДПТНВ
пересекаются в точках ω0.
Регулирование частоты вращения ДПТНВ
осуществляется:
– изменением сопротивления реостата
rдоб в цепи якоря
(только в сторону ее уменьшения от
номинальной)
– изменением магнитного потока возбуждения
с помощью реостата Ф в цепи обмотки
возбуждения (при двухзонном регулировании)
– изменением подводимого к цепи якоря
напряжения (только в низ от номинальной
частоты вращения, так как подавать на
двигатель напряжение выше номинального
недопустимо по условиям коммутации и
электрической прочности изоляции).
– импульсное регулирование (цепь якоря
периодически подключается к сети). Если
же хотя бы один из перечисленных
параметров двигателя изменен, то
механические характеристики называются
искусственными.
Для ДПТ – механические характеристики
прямолинейны и определяются двумя
точками:
Точка А – точка холостого хода ω = ω0,
M=0.
Точка Б – соответствующая номинальной
нагрузке двигателя с координатами MНОМ
и ωНОМ.
Для естественной характеристики точка
Б определяется из каталога
-
 ;
; .
.
Для точки А скорость холостого хода
-
 ;
; .
.
Для построения искусственной характеристики
точки Б рассчитывается число оборотов
-
 .
.

1 – естественная
характеристика при rдоб1=0
2; 3 – искусственные
характеристики при rдоб1>0
rдоб2>0,
и при rдоб3>rдоб4
Рис.2. Естественная
и искусственные механические характеристики
При расчете механических характеристик
обычно решают одну из двух задач:
-
По заданным координатам точки на
искусственной механической характеристики
при номинальной нагрузке с координатами
MНОМ и nНОМ
определяют сопротивление резистора
M, в соответствующее этой
искусственной характеристики. -
По заданным значениям сопротивления
резистора M и тока якоря
IЯНОМ, соответствующего
номинальной нагрузке двигателя,
определяют частоту вращения якоря
двигателя и строят искусственную
механическую характеристику.
Задача 1: ДПТНВ имеет номинальные
данные:
– мощность РНОМ=42кВт;
– напряжение UНОМ=440В;
– частота вращения nНОМ=3000об/мин;
– сопротивление обмоток цепи якоря
RЯ=0,17Ом;
– КПД ηНОМ=90,5%.
Требуется определить сопротивление
резистора rдоб,
который следует включить последовательно
в цепь якоря, чтобы при номинальном
моменте нагрузки MНОМ
частота вращения была n’НОМ=0,5
nНОМ об/мин.
Решение:
-
Ток якоря в номинальном режиме:

-
Пограничная частота вращения:

-
Номинальный момент на валу двигателя:

-
Координаты точки номинального режима
на естественной механической
характеристики: ;
; .
. -
Номинальное сопротивление двигателя:

-
Сопротивление резистора M,
соответствует искусственной механической
характеристике с координатой частоты
вращения:

-
Механические характеристики ЭП с
рассматриваемым двигателем на рис.3:

Рис.3. Естественная
и искусственная механические характеристики
Н а
а
рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная
характеристика. В режиме искусственной
механической характеристики вводится
понятие номинального сопротивления,
представляющего собой сопротивление
RНОМ, каким должна
обладать цепь якоря двигателя, чтобы
при подведенном к неподвижному якорю
напряжении UНОМ ток
в цепи якоря был бы номинальным IЯНОМ:
Задача 2: Рассчитать координаты
необходимые для построения естественной
и искусственной механической характеристики
ДПТНВ типа ПБС-62, если внешнее сопротивление
в цепи якоря rдоб=2,4Ом.
Номинальные данные двигателя:
– мощность РНОМ=4,7кВт;
– напряжение UНОМ=220В;
– частота вращения nНОМ=1000
об/мин;
– КПД ηНОМ=87%.
Решение:
-
Номинальный ток якоря:

-
Номинальное сопротивление двигателя:

-
Сопротивление обмоток в цепи якоря:

-
Пограничная частота вращения:

-
Номинальный момент:

-
Частота вращения в режиме искусственной
механической характеристики при
номинальном моменте нагрузки:
7) По координатам n0=1069об/мин,
nНОМ=1000 об/мин и
MНОМ=44,9Н·м строят
естественную механическую характеристику;
а по координатам n0=1069об/мин,
n’НОМ=714 об/мин и
MНОМ=44,9Н·м, строят
искусственную механическую характеристику.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
На рис.4 представлена схема включения
ДПТ последовательного возбуждения.

Рис.4. Схема ДПТ
последовательного возбуждения
Отличительный признак – ток нагрузки
двигателя (ток якоря) является током
возбуждения IЯ=IB=I,
поэтому магнитный поток Ф зависит от
нагрузки:
-
 ,
,
где С – коэффициент пропорциональности.
При том вращающий момент
-
 ,
,
то есть пропорционален квадрату тока,
тогда ток
-
 .
.
Число оборотов:
-
 ,
,
следовательно механическая характеристика
ДПТ криволинейна.
Особенности характеристики:
-
Механическая характеристика не
пересекает ось координат, так как при
отсутствии нагрузки двигателя частота
вращения возрастает неограниченно. По
той причине не допускается работа ДПТПВ
при нагрузке M≤0?25MНОМ. -
При малых нагрузках частота вращения
значительна (характеристика мягкая).
При нагрузках близких к номинальной,
характеристика становится более жесткой
(пологой). Объясняется это тем, что при
токе нагрузки IЯ≥0,8IЯНОМ
магнитная система насыщается и магнитный
поток возбуждения остается практически
неизменным.
Для построения естественной механической
характеристики n=f(M)
ДПТПВ по универсальным характеристикам
поступают следующим образом:
1) Определяют фактические номинальные
значения тока IЯ(A),
момента M(Н·м) и частоты
вращения n об/мин.
2) Задаются рядом относительных значений
тока нагрузки и по универсальной
характеристики определяют относительные
значения момента М* и частоты n*
3) Сроят естественную механическую
характеристику, пересчитав через
номинальное и относительное значения
требуемых параметров с целью определения
текущих.
Задача 3: Построить естественную
механическую характеристику для ДПТПВ
с техническими данными:
– IЯНОМ=19A;
– PНОМ=3кВт;
– UНОМ=220B;
– nНОМ=1130 об/мин.
Решение:
-
Номинальное значение момента
2) По полученным данным строим естественную
механическую характеристику (график
проходящий через точку А1)
При расчете искусственных характеристик
решают так же одну из двух задач:
-
Либо по заданным координатам точки на
искусственной механической характеристики
определяют сопротивление резистора
rдоб, необходимое
для получения требуемой искомой
характеристики. -
Либо по заданным сопротивлениям rдоб
определяют координаты точек искусственной
характеристики.
3) Задаемся относительными значениями
тока нагрузки и по универсальным
естественным характеристикам определяем
величины, необходимые для построения
естественной характеристики двигателя
сначала в относительных единицах, затем
в именованных.

Рис.5. универсальная
естественная характеристика

Рис.6. График
естественной и искусственных механических
характеристик
Задача 4: Для двигателя последовательного
возбуждения (см задача выше) определить
сопротивление резистора rдоб,
при включении которого в цепь якоря
искусственная механическая характеристика
пройдет через т А2 с координатами:
MНОМ=25,35Н·м, nНОМ=750
об/мин.
Решение:
-
Номинальное сопротивление двигателя:
-
КПД в номинальном режиме:

-
Сопротивление обмоток в цепи якоря:

-
Сопротивление резистора rдоб
ВАРИАНТЫ ЗАДАНИЙ
Для всех задач использовать формулировку
как в приведенных примерах. Технические
характеристики двигателей выбрать из
таблицы согласно вариантам.
Таблица 1 –
Технические характеристики двигателей
|
№ |
РН, |
Uн, |
КПД, |
nH, |
RЯЦ, |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1 |
4 |
220 |
72.3 |
900 |
4.06 |
|
2 |
3.45 |
220 |
69.3 |
750 |
5.96 |
|
3 |
2 |
220 |
57.6 |
450 |
9.33 |
|
4 |
4.25 |
220 |
68 |
730 |
4.57 |
|
5 |
3 |
220 |
60.3 |
475 |
7.24 |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
6 |
3.55 |
220 |
60.1 |
425 |
6.62 |
|
7 |
15 |
220 |
77.9 |
1400 |
0.278 |
|
8 |
7.5 |
220 |
76 |
1000 |
1.93 |
|
9 |
6 |
220 |
74 |
875 |
3.09 |
|
10 |
4.25 |
220 |
65 |
580 |
4.79 |
|
11 |
11 |
220 |
78.5 |
1060 |
1.23 |
|
12 |
8.5 |
220 |
76 |
875 |
2.08 |
|
13 |
8 |
220 |
68 |
600 |
2.93 |
|
14 |
11 |
220 |
76 |
800 |
1.77 |
|
15 |
8.5 |
220 |
68 |
515 |
2.76 |
|
16 |
15 |
220 |
80.7 |
850 |
1.31 |
|
17 |
11 |
220 |
70.5 |
530 |
2.23 |
|
18 |
15 |
220 |
75.3 |
580 |
1.65 |
|
19 |
17 |
220 |
73 |
500 |
1.53 |
|
20 |
20 |
220 |
75 |
475 |
1.36 |
ВРЕМЯ, ОТВЕДЕННОЕ НА ВЫПОЛНЕНИЕ РАБОТЫ
1. Подготовка к работе – 1,0 акад.час
2. Выполнение работы – 2,0 акад.часа
3. Оформление работы – 1,0 акад.час
ЛИТЕРАТУРА
-
Кацман М.М. Электрический привод: Учебник
для студ. образоват. учреждений сред.
проф. образования. – М.: Издательский
центр «Академия», 2005. – 384с. ISBN
5-7695-2060-4 -
Практикум по электротехнике и электронике.
Учебное пособие для вузов / Кононенко
В.В., Мишкович В.И., Муханов В.В., Планидин
В.Ф., Чеголин П.М. / Под ред. В.В.Кононеко.
– Ростов н/Д. Феникс, 2007. – 384с.
СОДЕРЖАНИЕ
Введение 2
Расчет механических характеристик ДПТ
независимого возбуждения 2
Расчет механических характеристик ДПТ
последовательного
возбуждения 8
Варианты заданий 12
Время, отведенное на выполнение
работы 13
Литература 13
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические
указания к выполнению практической
работы по
дисциплине
«Электромеханические системы» для
студентов
специальности
210100 всех форм обучения
Составили:
Мефедова Юлия Александровна
Рецензент
Т.Н. Скоробогатова
Редактор Л.В.Максимова
Корректор А.М.Рогачева
|
Подписано |
Формат 60х84 |
|
|
Бумага |
Усл. печ. л. |
Уч.-изд.л. |
|
Тираж 100 |
Заказ |
Бесплатно |
Саратовский государственный технический
университет
410054, г.Саратов, ул.Политехническая, 77
Копипринтер БИТТиУ, 413840, г.Балаково, ул.
Чапаева, 140



16
Джентльмены,
Выкладываю здесь копию моей заметки на эту тему, опубликованной в ЛТ в 2006 году…
Как определить номинальное напряжение неизвестного электродвигателя ?
Вам в руки попал миниатюрный моторчик без опознавательных знаков, и без маркировки хотя бы его рабочего напряжения, не говоря уже о мощности. Можно ли его использовать для ж.д. моделизма ?
Для начала следует критически посмотреть на его размеры. Очень маленький (особенно по диаметру) двигатель по определению не может быть достаточно мощным для модели среднего размера. И здесь дело – даже не в его рабочем напряжении… Оно-то зачастую как раз бывает вполне достаточным: я видел моторчики диаметром тоньше обычного деревянного карандаша, на напряжение аж 27 (!) вольт, но даже при этом напряжении они тормозились легчайшим касанием пальца за выходной вал. При таком малом диаметре корпуса (а значит – и ротора) крутящий момент ничтожен. Где уж тут приводить в движение локомотив НО или ТТ при 12 вольтах…
О мощности…
Существует распространенное заблуждение, что двигатель модели может быть и маленьким, но, если он достаточно высокооборотный, то достаточно оснастить привод модели редуктором с большим коэффициентом замедления (скажем, К=60 или К=80), и получится тот же результат, что с более крупным и тихоходным двигателем и редуктором с меньшим К. Отсюда возникают проекты с крошечными моторчиками, спрятанными в раме, или между боковинами тележек… На самом деле, подобной «подменой» действительно можно обеспечить равенство в обоих случаях, но это равенство будет условным, и только для крутящего момента.
Возьмем 2 условные комбинации «мотор+редуктор»:
1) «малый» двигатель + «большой» редуктор,
2) и наоборот, – «большой» двигатель + «малый» редуктор.
Обозначим их крутящие моменты Т1 и Т2 соответственно (Т1 < Т2), а коэффициенты редукторов обозначим К1 и К2 (К1 > К2). Редуктор повышает крутящий момент в К раз, поэтому при равенстве соотношений Т1/Т2 и К2/К1 получается формальное равенство крутящего момента на выходе редуктора (то есть – на ободе колеса): Т1К1 = Т2К2. Значит, оба условных локомотива тянули бы одинаково ? Формально – да, но практический ресурс двух изделий будет здорово отличаться…
Достаточно вспомнить, что для передвижения поезда с масштабной скоростью (на расстояние L за время T) локомотив должен обладать некоей силой тяги F. Эту силу действительно способны развить обе вышеуказанные комбинации (при равенстве крутящих моментов на ободе колеса). Совершенная физическая работа А = F x L, а значит – и выданная механическая мощность P = А / Т окажутся также одинаковыми. Однако эту мощность, со скидкой на КПД, двигатель потребил в виде электричества, и ее значительную часть он должен рассеять в виде тепла. Причем рассеять очень быстро и эффективно, чтобы не перегрелась обмотка, изоляция, подшипники и пр. И тут становится ясно, что маленький двигатель не способен хорошо охлаждаться, так как его миниатюрные детали являются НЕдостаточно массивными для быстрого пропускания теплоты. Даже при номинальной нагрузке перегрев быстро концентрируется в обмотке маленького двигателя, и тепло «не уходит» на сердечник ротора и статор в достаточной степени. Сначала обмотка нагревается, увеличивается ее сопротивление, потребляемый ток и мощность падают… Двигатель как бы «пытается защититься» от критического режима… Но нагрев продолжается… Смазка в подшипниках начинает хуже выполнять свои функции или вообще вытекает из-за нагрева… Двигатель сгорает.
По той же причине, но еще более усугубленной полным отсутствием массивного стального сердечника в роторе (и недостаточной теплоотдачи с обмотки на окружающие детали) – двигатели «фаульхабер» – при всех их достоинствах – еще более чувствительны к перегреву.
Помимо тепловых проблем мелких двигателей, в функционирование первого варианта неизбежно вмешиваются механические проблемы: редукторы с большим К – обычно червячные – по определению обладают более высоким уровнем внутреннего трения, чем редукторы с небольшим К. Чтобы уместить их на локомотиве, приходится использовать очень мелкий модуль зубьев (например 0.2), и это тоже – прямая дорога к быстрому износу и скорой замене агрегатов… Ну и, наконец, шум быстроходного маленького моторчика при 16-20 тыс.об/мин тоже не украшает большинство локомотивов.
О напряжении…
От размеров и мощности – возвращаемся к рабочему напряжению неизвестного моторчика. Поскольку в руки к моделисту чаще всего попадают двигатели от электрических игрушек, рассчитанные на питание от одной-двух пальчиковых батареек, то для начала следует попытаться «покрутить» двигатель от одной батарейки 1.5 В.
Если при этом двигатель начинает энергично вращаться, то наверняка где-то тут недалеко (от 1,5 до 4,5 вольт) и находится номинальный режим двигателя… Конечно, словосочетание «энергично вращаться» не является очень информативным и точным, – но даже неискушенное ухо отличит характерный звук номинального режима (2-3 тыс. об/мин) от слабого и едва заметного вращения. В этом случае испытание можно закончить – все ясно.
Если двигатель совсем не пришел в движение, то:
1) либо его обмотка (или щеточный механизм) неисправны – тогда нужно «прозвонить» мотор тестером (или любым другим доступным способом – вплоть до лампочки с батарейкой).
2) либо рабочее напряжение (а значит – пусковое напряжение) значительно выше, чем 1,5 В. В нашем деле – это скорее хороший признак, т.к. означает, что мотор не совсем низковольтный, и есть шанс эксплуатировать его при 12 В.
Первый случай дальше не рассматриваем: ремонт неисправных двигателей выходит за пределы настоящей заметки. Если двигатель вращается совсем слабо, то рассматриваем это тоже как «второй случай»: значит, рабочее напряжение где-то выше.

Теперь можно собрать простейшую схему (рис. 1) из регулируемого блока питания, вольтметра и амперметра (современные аналоговые блоки для питания макетов, особенно американские, уже имеют эти встроенные 2 прибора на лицевой панели). Наша задача: замерить напряжение ТРОГАНИЯ двигателя на холостом ходу. Практикой установлена простая закономерность:
РАБОЧЕЕ НАПРЯЖЕНИЕ ПРИМЕРНО В 5 РАЗ ВЫШЕ НАПРЯЖЕНИЯ ТРОГАНИЯ.
Несмотря на простоту этой формулы, неизбежны вариации – в зависимости от конструкции и физического состояния двигателя. Поэтому, наращивая напряжение до расчетного 5-кратного, следует следить за током двигателя по амперметру, мысленно умножая НАПРЯЖЕНИЕ х ТОК = МОЩНОСТЬ. При этом моделиста должны насторожить нереально большие значения мощности. Маленький моторчик длиной или диаметром около 2-3 см в принципе не способен долго потреблять большую мощность (скажем 50-100 ватт) – это прямая дорога к выгоранию обмотки и щеточного механизма.
Однако в некоторых случаях приборы могут показывать именно такие большие величины (типа 5-8 ампер при 12 вольтах). Причин может быть несколько:
1) Частичное размагничивание статора двигателя. Оно характерно для случаев небрежного хранения: когда несколько двигателей долго хранились, «слепившись в кучу» своими магнитами. Или когда двигатель работал или хранился около внешних источников сильных магнитных полей (постоянных или переменных). Также саморазмагничивание нередко происходит с двигателями старой конструкции, где использовались железные магниты (а не современные редкоземельные или керамические). Я встречал в Интернете утверждения, что такие старинные двигатели кто-то умеет намагничивать снова (не ставить же современный Sagami в модель-раритет полувековой давности, которая и ценна как раз своей анахроничностью…). В любом случае при размагниченном статоре двигатель прокручивается «от руки» как обычно (то есть довольно легко), но под напряжением вращается очень вяло, не тянет, легко тормозится пальцем, трогается с места лишь при большом напряжении (скажем, 8 В) и при большом токе (например, 2 А). Поэтому, если довести его до «расчетного» режима по принципу «умножения напряжения трогания на 5», то можно увидеть на вольтметре 40 В, а на амперметре – 10 А. Правда, – увидеть кратковременно, – так как моторчик задымит через пару секунд: 400 ватт – не шутка. Описанная картина, однако, является чисто виртуальной, так как такой мощный блок питания – редкость в арсенале моделиста. Обычный «пиковский кирпич» выдает около 2 А, далее срабатывает защита. Но даже ток 2 ампера при среднем напряжении 8-12 вольт уже должен насторожить !
2) Плохое состояние подшипников (отсутствие смазки, грязь, ржавчина) или коллектора (нагар, окислы, задиры). В этом случае двигатель туго прокручивается даже «от руки», а под напряжением – трогается поздно, при большом напряжении и большом токе. Раскрутившись, двигатель, на первый взгляд, работает неплохо, и через несколько минут даже «добавляет оборотов». Но стрелка амперметра не дает ошибиться: внутреннее трение в двигателе недопустимо велико, идет интенсивный износ и нагрев…
3) Внутренний обрыв на одной или нескольких секциях обмотки ротора (справедливо для сложных современных двигателей ДПМ, ДПР, и прочих «военных», «авиационных» и «космических», имеющих 5- или 7- или 9-полюсные обмотки ротора. Такой двигатель может не запускаться из определенных положений ротора (у исправного двигателя не бывает «мертвых точек»), сильно шумит и вибрирует, крутится вяло и не тянет. Рабочий ток у него в среднем почти нормальный, но при просмотре на экране осциллографа на месте обычных пилообразных импульсов видны «пропущенные такты», когда ток через двигатель прерывается (в моменты включения в коллекторную цепь неисправных секций обмотки).
Другие способы оценки рабочего напряжения.
Оценка на слух.
Я встречал этот совет в Интернете, но результат такой оценки мне кажется слишком неточным: якобы нормальный режим холостого вращения двигателя диаметром 2-3 см соответствует звуку частотой примерно 3 кГц. Если звук холостого хода гораздо выше – поданное напряжение наверняка слишком велико для данного двигателя.
Сравнение с аналогичным двигателем.
Предлагается сравнивать напряжение при одинаковом значении тока у двух двигателей (свойства одного из которых точно известны). При этом еще оценивать скорость вращения. Методика требует опыта, хотя менее субъективна, чем предыдущая…
Оценка по искрению коллектора.
Требуется блок питания с достаточным запасом по мощности. Метод основан на том допущении, что обычно в хороших двигателях сечение щеток, размеры ламелей коллектора, усилия прижатия щеток сбалансированы и продуманы: они рассчитаны так, чтобы в номинальном режиме не создавать искрения и шума. Следует плавно наращивать напряжение на холостом ходу, наблюдая за работой щеток и коллектора (такое наблюдение возможно, естественно, не на всех типах двигателей). Довести двигатель до момента возникновения первых регулярных искр. Не допускать сильного искрения (а тем более «кругового огня» на коллекторе). Не доводить до появления необычных шумов. «Поймав» момент начала регулярного искрения, следует дать двигателю поработать минут 10, наблюдая за температурой корпуса. Если сильного нагрева (свыше 50 градусов) нет, то это и есть максимально допустимое длительное напряжение для данного двигателя.
Оценка момента насыщения магнитного потока двигателя.
Самый научно обоснованный метод. В его основе лежит свойство магнитных материалов ротора насыщаться магнитным потоком (когда ток через обмотку продолжает нарастать, а сила магнитного потока в магнитопроводе – больше не растет, достигнув максимума). Дело в том, что двигатель при вращении не только потребляет электроэнергию. Он еще и генерирует свою электроэнергию: это ЭДС (т.е. напряжение) самоиндукции, которое складывается с питающим напряжением в той же полярности (то есть «+» ЭДС вырабатывается на той же клемме двигателя, на которую подается «+» источника внешнего питания).
Если питать двигатель пульсирующим напряжением (что мы обычно видим в типовых блоках питания для макетов – после мостового выпрямителя напряжение на выходе пульсирует с частотой 100 Гц), то каждую секунду напряжение 100 раз изменяется от 0 до 12 вольт, нарастая и спадая, рисуя на экране осциллографа «полусинусоиды» (см. рис. 2-А). Теперь, если подключить к такому блоку питания двигатель, то на экране осциллографа форма напряжения изменится: «полусинусоиды» перестанут спадать до нуля (см. рис. 2-Б). Как раз это спрямление («полочка» или «всплеск напряжения») внизу каждого минимума и является ЭДС самоиндукции – напряжением, вырабатываемым двигателем при вращении.

ЭДС самоиндукции прямо пропорциональна магнитному потоку якоря двигателя. Таким образом, если наращивать напряжение питания двигателя, то в какой-то момент железо якоря насытится магнитным потоком. Потребляемый ток двигателя будет продолжать нарастать, а вот магнитный поток, и, значит, ЭДС самоиндукции, нарастание прекратят или ощутимо замедлят. Наблюдая за амплитудой «всплесков» ЭДС самоиндукции на экране осциллографа, можно поймать момент, когда ее рост прекратится, или даже она начнет уменьшаться. Несмотря на то, что наращивание питающего напряжения еще можно продолжить… Именно при этом напряжении питания двигатель имеет максимальный КПД, и, если не происходит сильного разогрева корпуса в течение 10 минут, то двигатель можно рекомендовать для длительной работы в данном режиме.
Понятно, что мало у кого есть в распоряжении осциллограф. Мой – время от времени еще используется, несмотря на то, что годы бурного радиолюбительства позади… Однако я читал, что в качестве суррогата можно неплохо использовать обычный ПК со звуковой платой, и необходимо лишь использовать соответствующую утилиту (например разные версии «Oscilloscope» или «Scope30» без труда находятся Яндексом для скачивания ).
Скажу честно: сам я такой вариант не пробовал. Нюансы, о которых надо помнить:
1) бесполезно подавать на вход звуковой платы отфильтрованное постоянное напряжение (из-за наличия конденсаторов на входе). Однако для данного исследования это не принципиально, поскольку мы используем пульсирующее напряжение. Оно «проходит сквозь конденсаторы» подобно переменному, – просто смещается нулевая линия на экране,
2) пульсирующее и переменное напряжение – нельзя подавать выше 0,25 В по амплитуде. В нашем случае – для испытаний пульсирующим напряжением с амплитудой в диапазоне 0…25 вольт – следует спаять делитель напряжения из пары резисторов с соотношением номиналов примерно 1:100 (например, 10 килоом + 100 ом) (см.рис.3). Такой делитель ослабляет напряжение на входе звуковой платы примерно в 100 раз (если быть точным – то в 101 раз), что позволяет при питающем напряжении до 25 вольт не превысить максимально допустимое напряжение 0,25 В на входе платы. Точность номиналов делителя не важна, так как нам нужно ОЦЕНИТЬ ИЗМЕНЕНИЯ, а не измерить абсолютные величины напряжений (для этого достаточно вольтметра).

Удачных вам исследований !
Э.Ершов.
Способы небесспорные, и не всегда общедоступные, – сильно не ругайте….
______________________________________________________________________
Как всегда так же доступны файлы для скачивания…
Собственно заметка
Иллюстрация 1
Иллюстрация 2
Иллюстрация 3
Заторможенный ротор – это экстремальный режим – его нет смысла рассматривать.
Вопрос заключается в том, как определить номинальное напряжение,
Возьмите для мотора какую нибудь соразмерную нагрузку (некорректый термин, сам понимаю, но нужно что-то взять за основу). И начинайте повышать напряжение. Обороты будут расти, Измеряйте ток, измеряйте момент, измеряйте обороты.
График КПД, расчётный будет иметь вид горбика, один максимум. Его падение при дальнейшем повышении оборотов определяется индуктивными потерями в железе, искрением в коллекторе, потерями в подшипниках и тд. Расчитать его довольно трудно, а вот померять – вполне можно. Если изменять нагрузку в довольно широких пределах, то вид графика КПД (от оборотов), (ну и напряжения) будет меняться не сильно.
Хотя, конечно двигатели бывают разные. Для коротко работающих или экстремально перегруженных (авто-стартёры) – это будет некорректно
Но лично я пошел бы другим путём. Быстрее и дешевле будет или найти его параметры в ИНете или найти аналогичный мотор с описанием. Или просто похожий по размеру и весу и предположить у них РАВНУЮ мощность
