Что нужно знать о скольжении асинхронного двигателя
Содержание
- 1 Устройство и принцип работы
- 2 Что такое скольжение АД
- 3 Зависимость режимов работы мотора от скольжения
- 4 Способы измерения
- 5 Видео по теме
Одним из основных электромоторов в мире является асинхронный двигатель. Чтобы его использовать в качестве привода, надо понимать, как поведет себя одна из главных переменных характеристик при пуске, изменении нагрузки на валу, колебании электронапряжения и частоты. Этот параметр называется скольжением электродвигателя.

Устройство и принцип работы
Двигатель переменного электротока, в котором скорость вращения ротора меньше скорости вращающегося электромагнитного поля статора, называется асинхронным.
Обмотки статора подключаются к сети синусоидального трехфазного электротока, после чего электромагнитный поток начинает вращаться и пересекает замкнутые токопроводящие витки подвижной части мотора. Под действием наведенной в них ЭДС возникает переменный электроток. Он создает свое магнитное поле, которое заставляет вращаться ротор с асинхронной скоростью следом за полем статора.

Статор представляет собой набранный из изолированных листов электротехнической стали корпус, в который различным способом уложены обмотки возбуждения. Ротор тоже шихтуется из изолированных листов. Они имеют пазы, в которых закрепляются штыри короткозамкнутого ротора или укладывается фазная обмотка. На концах вала ротора расположены подшипники, вставленные в торцевые крышки статора.

Короткозамкнутый ротор (его также называют «беличьей клеткой») состоит из набора стержней из алюминия или меди. По торцам они закольцованы вместе. Это наиболее простая и распространенная конструкция АД.

Мотор, ротор которого содержит 3-х фазную обмотку, называется фазным. Полноценные изолированные витки трех обмоток концами соединены вместе, а их начала выведены на контактные кольца. При помощи щеточного скользящего контакта катушки выведены на внешнее управление.

Что такое скольжение АД
Создание вращающегося магнитного поля (МП) в неподвижной части электрической машины происходит за счет разнесенных на 120 градусов по окружности корпуса витков 3-х катушек. Они образуют одну пару полюсов (p), на практике их может быть больше. Обмотки соединяются «треугольником» или «звездой». Запитываются они от трехфазной сети переменного электротока.
Электроток, сдвинутый по фазе на 120 градусов, протекая по размещенным по окружности виткам 3-х катушек, создает вращающееся МП с синхронной частотой:

Вращающееся МП, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного электротока, воспроизводящего свое вращающееся электромагнитное поле.
Подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2 (об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n1 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется коэффициентом скольжения (S):

Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n1, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.

Зависимость режимов работы мотора от скольжения
Для АД скольжение рассматривается:
- В режиме холостого хода (ХХ);
- при номинальном значении нагрузки;
- генераторном применении;
- критической нагрузке;
- во время пуска.

Асинхронная скорость n2 в режиме ХХ при отсутствии нагрузки на валу практически равна синхронной скорости вращения электромагнитного поля статора n1. Скольжение в этом случае будет не более 3% и даже в режиме идеального ХХ (если пренебречь трением в подшипниках), оно не будет нулевым.
При номинальном напряжении и нагрузке скольжение S находится в диапазоне 2–8% для большинства моторов. Номинальная скорость или скольжение указываются на шильдике асинхронного двигателя. По ним строится график механической характеристики.
В генераторном режиме скольжение может быть отрицательным, то есть, меньше 0. Ротор в этом случае вращается под действием механической силы навстречу вращающемуся электромагнитному полю статора.
С увеличением нагрузки на валу мотора увеличивается момент торможения, вследствие чего увеличивается и скольжение. При этом растет электроток, наводимый в роторе, наряду с моментом вращения. При небольших нагрузках между моментом и скольжением наблюдается прямо пропорциональная зависимость. Но рост скольжения способствует возрастанию активных потерь в роторе, снижающих наводимый электроток. По этой причине момент увеличивается с меньшей скоростью, чем скольжение, а при определенном значении последнего момент становится максимальным и начинает снижаться. Скольжение, соответствующее максимальному моменту, называется критическим.
При пуске мотора асинхронная скорость равняется нулю, скольжение — единице, электроток в двигателе максимальный, а значение момента вращения вала выше значения момента торможения нагрузки. С увеличением скорости вращения МП ротора скольжение уменьшается, а когда скорость достигает своего номинального значения, устанавливается нормальный режим.

Из графика видно, что скольжение мотора меняется от 0 до 1. До того момента, пока не возникнет критическое скольжение, мотор работает устойчиво, а в промежутке от Sкр до 1 возникает неустойчивый режим, который зависит от характера и величины нагрузки на валу. Для управления в этом диапазоне применяют либо переключение «звезда-треугольник», либо фазный ротор, либо частотное регулирование.
Способы измерения
Измерение скольжения в двигателе должно осуществляться согласно требованиям ГОСТ 7217–89 с помощью амперметра постоянного тока, катушки индуктивности или стробоскопического эффекта.
Основная задача — подсчитать количество полных N отклонений стрелки от 0 за период времени T. После того, как нашли данный параметр, можно определить частоту электротока ротора:

Затем по соотношению частоты электротока статора и ротора следует найти скольжение:

Косвенными методами при использовании электромагнитной катушки или стробоскопического эффекта определяют количество оборотов ротора К за период времени Т (сек). Затем вычисляется скольжение. Для этого используется формула:

При больших значениях скольжения для измерения применяются тахогенераторы или тахометры, установленные на валу двигателя.
Видео по теме

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Методичка по электротехнике.pdf
Скачиваний:
519
Добавлен:
02.04.2015
Размер:
2.91 Mб
Скачать
|
В двигательном |
режиме частота |
вращения |
ротора (n) всегда мень- |
|
|
ше частоты |
вращения |
магнитного поля |
статора |
(n1 ). Эта особенность и |
|
определяет |
название |
двигателя асинхронный. |
||
|
Величина, характеризующая разность частот вращения ротора и маг- |
||||
|
нитного поля статора, |
выраженная в относительных единицах или про- |
|||
|
центах, называется скольжением |
|
s= ( n1 n )/ n1 , |
s ((n |
n) / n )100 % . |
|
1 |
1 |
Из приведенной формулы следует, что скольжение асинхронного двигателя изменяется в диапазоне 0 s 1.
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньше частоты вращения магнитного поля, которую в дальнейшем будем называть синхронной частотой. В этом случае скольжение весьма мало отличается от нуля. Однако ток холостого хода статора примерно на порядок больше тока холостого хода трансформатора. Напомним, что ток холостого хода трансформатора составляет (2…8) % от номинального значения тока первичной обмотки. Ток холостого хода двигателя составляет (20…40) % от номинального тока статора. Такое увеличение тока холостого хода объясняется тем, что воздушный зазор между статором и ротором увеличивает магнитное сопротивление цепи двигателя для магнитного потока.
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением. Для асинхронных двигателей номинальное скольжение составляет (1…8) %. Меньшие значения соответствуют двигателям большей мощности, большие значения скольжения соответствуют двигателям малой мощности.
Частота вращения ротора (об/мин) может быть определена, если известны синхронная частота магнитного поля статора и скольжение:
n = n1 ( 1 s ) .
Например, для двигателя общепромышленного назначения (f =50 Гц), имеющего четыре полюса и номинальное скольжение 4 %, частота вращения
|
ротора равна n = 6 0 f |
( 1 s )/ p = 3000(1 0,04 )/ 2 = 1440 об/мин. Часто- |
|
|
та |
тока в обмотке |
ротора, пропорциональная абсолютной разности |
синхронной частоты и частоты вращения ротора, называется частотой
|
скольжения. |
Ее значение вычисляется по формуле f2 = ( n1 n ) р / 60 , Гц. |
|
Если |
числитель и знаменатель выражения для частоты скольжения |
умножить на значение синхронной частоты, то получим возможность вы-
181

|
числять частоту |
скольжения |
через известные значения частоты питаю- |
|
щего напряжения |
и величину |
скольжения: |
|
f2 = ( n1 n ) n 1 ּ р / 60ּn1 = r1 ּ s. |
Для f1 = 50 Гц и скольжения s = (2…8) % частота f2 = 1…4 Гц.
Влияние частоты скольжения проявляется на параметрах ротора: ЭДС и реактивном сопротивлении. Выражение для ЭДС обмотки ротора имеет вид E2S = 4,44w2f2Фmкoб, где коб коэффициент, учитывающий специфику выполнения обмотки ротора (обмоточный коэффициент).
Вслучае неподвижного ротора, когда s = 1, частота скольжения f2 равна частоте питающего двигатель напряжения. Поэтому E2S = E2.
Вслучае вращающегося ротора, когда f2 = f1 s, выражение для ЭДС при-
мет вид E2S = 4,44w2fФmko6s = E2 ּs.
Аналогичную связь можно установить и между индуктивными сопротивлениями неподвижного x2S и вращающегося ротора х2:
x2S = x2ּs
Пример 13.1. Для трехфазного асинхронного двигателя известно, что при частоте f1 = 50 Гц. ЭДС и индуктивное сопротивление неподвижного ротора равны: Е2 =120 В., х2 =130 Ом.
Определить значения f2S, Е2S и х2S при скольжении s = 4 % . Воспользовавшись вышеприведенными формулами, получим:
f2S = f1 ּs = 2 Гц; E2S = E2 ּs = 4,8 В; x2 = x2ּs = 5,2 Ом.
13.5. Механическая мощность асинхронного двигателя
Трехфазный асинхронный двигатель нагружает питающую активной мощностью Р1 = 3UФIФcosφФ =  3U лI л cos Ф . Здесь индексом ” ф ” обозначены
3U лI л cos Ф . Здесь индексом ” ф ” обозначены
фазные значения напряжения и тока обмотки статора; индексом ” л ” линейные значения напряжения питающей сети и тока, потребляемого двигателем.
Вдальнейшем будем обозначать индексом 1 параметры обмотки статора,
аиндексом 2 параметры обмотки ротора.
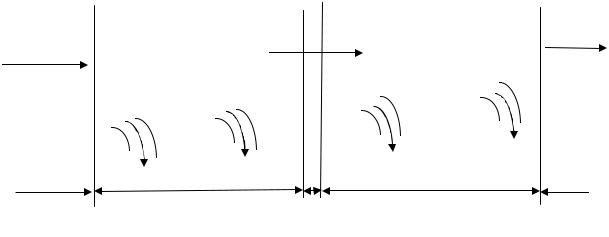
Процесс преобразования электрической энергии в механическую наиболее просто показать в виде энергетической диаграммы (рис. 13.8). На каждой ступени передачи происходят соответствующие потери энергии, обозначенные отдельными ручейками. Эта энергия считается потерянной, а отдельные ее составляющие называются потерями мощности.
На основании энергетической диаграммы двигателя можно определить механическую мощность РМЕХ, отдаваемую двигателем, путем вычитания из
182
Зазор
подведенной от сети мощности потерь на всех ступенях передачи. К ним относятся потери в обмотке статора, стали сердечника и потери в обмотке ротора.
Уравнение энергетического баланса двигателя запишем в виде
РМЕХ = 3U1I1 соsφ1 – 3I1 r12 pCT m2 I 2 r12 ,
где m2 число фаз обмотки ротора в случае фазного способа его исполнения или число стержней ротора, деленное на два, если обмотка ротора выполнена короткозамкнутой; рСТ потери в стали статора.
Потерями в стали ротора обычно пренебрегают по причине малой частоты тока ротора.
Электромагнитная мощность Рэм, передаваемая ротору, определяется произведением числа фаз, ЭДС, тока и коэффициента мощности ротора. Часть этой мощности выделяется в роторе в виде теплоты.
|
Р1 |
РЭМ |
Р2 |
|||||||||||||
|
рМ2 |
рМХ |
||||||||||||||
|
рСТ |
рМ1 |
Ротор |
Вал |
||||||||||||
|
Сеть |
Статор |
Рис. 13.8
Таким образом, механическую мощность асинхронного двигателя можно определить как разность между электромагнитной мощностью и потерями в обмотке ротора:
Рмех = m2Е2I2соsφ2 – m2 I 22 r2 .
Это уравнение можно представить в ином виде, если учесть, что Е2 = E2S / s, а произведение E2S соsφ2 = I 22 r2 определяет активную составляющую ЭДС ротора. На основании изложенного выражение для механической мощности примет вид Рмех = m2 I 22 r2 / s m2 I 22 r2, или после некоторого преобразования окончательно запишем:
Рмех = m2 I 22 r2 (1 s)/ s.
Если последнее выражение представить в виде sРмех / (1 s) = m2 I 22 r2 ,
то становится очевидным тот факт, что с увеличением скольжения увеличивается нагрев ротора.
183
Поэтому современные асинхронные двигатели рассчитываются так, чтобы в рабочем режиме скольжение было минимальным.
Полезная механическая мощность на валу двигателя Р2 меньше механической мощности Рмех, развиваемой двигателем, нa величину механических потерь, определяемых трением в подшипниках, а также трением ротора о воздух.
13.6. Вращающий момент и его зависимость от скольжения
Вращающий момент двигателя связан с механической мощностью и угловой частотой вращения ротора известной из механики формулой
М РМЕХ / 2 .
Механическая мощность и ее зависимость от параметров ротора с учетом полученных выше соотношений может быть представлена в виде следующего соотношения:
Рмех = m2Е2I2соsφ2(1 s).
Связь между угловой частотой вращения ротора и магнитным полем статора может быть выражена через скольжение 2 1 (1 s). Если обмотка ста-
тора имеет одну пару полюсов, то 1 , т. е. угловая частота вращения магнитного поля статора равна круговой частоте тока. Однако в общем случае двигатель имеет несколько пар полюсов. Тогда 1 /р , а выражение для угловой частоты ротора примет вид 2 = ( 1 s ) / р .
Учитывая это обстоятельство, выражение для вращающего момента запишем в виде М = (рm2/ )Е2I2соsφ2. Обозначив отношение, стоящее в скобках, как некоторую постоянную СМ, запишем выражение для вращающего момента в виде
М = СМ Е2I2соsφ2.
Анализ полученного выражения показывает, что вращающий момент двигателя пропорционален произведению тока и ЭДС ротора и углу сдвига фаз между ними. Покажем влияние скольжения на отдельные сомножители, опре-
|
деляющие |
вращающий момент двигателя. |
||||||||||||
|
Здесь |
СМ = рm2 / |
постоянная |
для данного |
типа двигателя |
|||||||||
|
величина, |
зависящая |
только |
от |
его |
конструктивных |
особенностей |
|||||||
|
E2 = 4,44w2f1Фmкoб – ЭДС, наводимая в обмотке неподвижного |
ротора; |
||||||||||||
|
I |
2 |
E |
2S |
/ z |
2 |
E |
2 |
s / |
r 2 (sx |
2 |
)2 |
ток в |
фазе обмотки вращающегося ро- |
|
2 |
|||||||||||||
|
тора, |
при |
увеличении |
скольжения увеличивается или уменьшается |
||||||||||
|
при его уменьшении; |
184
|
соsφ2 = r2/ |
r 2 (sx |
2 |
)2 фазовый угол между ЭДС и током в обмотке ротора, |
||||||
|
2 |
|||||||||
|
уменьшается при увеличении скольжения и увеличивается при его уменьшении. |
|||||||||
|
Таким образом, из трех основных параметров ротора только два зависят |
|||||||||
|
от скольжения, причем один изменяется прямо пропорционально, а второй |
|||||||||
|
обратно пропорционально скольжению. |
|||||||||
|
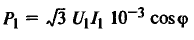
Графическая зависимость вращающего момента от скольжения су- |
|||||||||
|
щественна нелинейная (рис. 13.9,а). Характерными точками этой зависимости |
|||||||||
|
являются: МП пусковой момент, соответствующий s = 1, т. е. неподвижному |
|||||||||
|
ротору; MН номинальный момент, соответствующий номинальному скольже- |
|||||||||
|
нию sН, т. е. рабочему режиму; МКР критический момент, т. е. наибольшее |
|||||||||
|
значение |
вращающего |
момента, которому соответствует критическое значе- |
|||||||
|
ние скольжения sКР. |
|||||||||
|
Значение критического момента определяет границу между устойчивой и |
|||||||||
|
неустойчивой областями работы двигателя. Двигатель работает в устойчивой |
|||||||||
|
области, если при увеличении момента сопротивления на валу вращающий мо- |
|||||||||
|
мент возрастает. Скольжение в этой области изменяется от нуля до критическо- |
|||||||||
|
го значения. Если же при увеличении момента сопротивления скольжение уве- |
|||||||||
|
личивается, а вращающий момент уменьшается, то двигатель работает в неус- |
|||||||||
|
тойчивой области, что в конечном итоге ведет к его остановке. Скольжение в |
|||||||||
|
этой области больше критического, но меньше либо равно единице. Физически |
|||||||||
|
уменьшение величины вращающего момента в этой зоне объясняется уменьше- |
|||||||||
|
нием активной составляющей тока ротора, что приводит к уменьшению cosφ2. |
|||||||||
|
Зависимость вращающего момента от частоты вращения ротора называ- |
|||||||||
|
ется механической характеристикой. Вид характеристики показан на рис. 13.9,б. |
|||||||||
|
На механической характеристике можно выделить те же характерные точки, что |
|||||||||
|
и на зависимости М = ξ(s). |
|||||||||
|
а) |
М |
б) |
n |
||||||
|
MКР |
nH |
||||||||
|
nКР |
|||||||||
|
МП |
|||||||||
|
МН |
|||||||||
|
S |
М |
||||||||
|
0 |
SH SКР 0,4 |
0,6 |
0,8 |
1 |
0 |
МН МП |
МКР |
||
|
Рис. 13.9 |
|||||||||
|
185 |

13.7. Коэффициенты мощности и полезного действия асинхронного двигателя
Преобразование электрической энергии в механическую сопряжено не только с потреблением активной и реактивной мощностей, но и с потерями энергии. По этой причине коэффициенты мощности ( cosφ1) и полезного действия (η) асинхронного двигателя не остаются постоянными. Рассмотрим этот вопрос более подробно.
Изменение коэффициента мощности в процессе работы асинхронного двигателя обусловлено изменением составляющих тока статора. Реактивная составляющая тока статора не зависит от нагрузки на валу двигателя и при любом напряжении сети практически неизменна. В то же время, активная составляющая тока двигателя пропорциональна его механической нагрузке. Это приводит к тому, что с увеличением нагрузки относительное значение реактивного тока убывает, а коэффициент мощности увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок порядка 0,2…0,3. С увеличением нагрузки он быстро возрастает и достигает максимального значения 0,7…0,9 при номинальной нагрузке.
При увеличении нагрузки двигателя свыше номинального значения увеличивается реактивная составляющая тока и коэффициент мощности начинает уменьшаться. Причиной увеличения реактивной составляющей тока является влияние магнитных потоков рассеяния, что и приводит к увеличению реактивной мощности двигателя.
Значение коэффициента мощности трехфазного асинхронного двигателя можно вычислить по формулам
|
cos |
1 |
P / |
3U |
1 |
I |
1 |
P / |
P 2 |
Q 2 . |
|
1 |
1 |
1 |
1 |
Коэффициент полезного действия ( КПД ) определяется отношением полезной мощности Р2 к подводимой Р1. Следует помнить, что полезной является механическая мощность, развиваемая двигателем на его валу, тогда как подводимая мощность является электрическим параметром и определяется произведением напряжения, тока и коэффициента мощности.
Из приведенной выше энергетической диаграммы следует, что мощность Р1 равна сумме полезной мощности и всех видов потерь в двигателе
Р1 = Р2 + РП .
Потери мощности можно разделить на постоянные, практически не зависящие от нагрузки, и от нее зависящие – переменные. К группе постоянных потерь относятся потери в стале сердечника от гистерезиса и вихревых токов, а
186
также механические потери. Эти потери определяются экспериментально из опыта холостого хода. Переменными потерями являются потери, обусловленные сопротивлением проводников протекающему по ним току:
Р1 = 3 I12 r1; Р2 = m2 I 22 r2, Вт.
КПД двигателя (о.е.) можно вычислить по формуле
η = (Р2 + РП ) / Р1.
Максимальное значение КПД достигается при равенстве постоянных и переменных потерь. Обычно максимум КПД имеет место при нагрузке, равной 75 % от номинальной. Это объясняется тем, что двигатели проектируются с учетом того обстоятельства, что в процессе эксплуатации они не всегда полностью загружены.
13.8. Расчет механической характеристики двигателя по паспортным данным
Основными точками механической характеристики асинхронного двигателя являются: номинальный, пусковой и максимальный моменты, а также соответствующие им частоты вращения. Покажем, как, пользуясь информацией, приведенной в паспорте двигателя, можно рассчитать характерные точки механической характеристики. В табличке, закрепленной на корпусе статора, приведены значения номинальной механической мощности и частоты вращения ротора. По этим данным можно вычислить значения номинального момента на валу двигателя (Н.м):
|
М Н Р2 Н / Н , |
|
|
и номинального скольжения |
sH (n n) / n1, |
где ΩН = πn / зо круговая частота вращения ротора.
Для расчета значений пускового и максимального моментов следует взять справочник по электрическим машинам и найти в нем для данного двигателя два параметра: кратность пускового момента КП и кратность максимального момента КМ. Значения коэффициентов определяются соотношением соответствующих моментов к его номинальному значению:
КП = МП / МН , КМ = МКР / МН .
Из приведенных соотношений, находим значения пускового и макси-
мального моментов: МП = КП МН , ММ = КМ МН .
Скольжение, соответствующее пусковому моменту, равно единице. Следовательно, n = 0 об/мин, т. е. ротор неподвижен. Скольжение, соответствующее максимальному ( критическому ) моменту, вычисляется по формуле
187
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014 года; проверки требуют 24 правки.

Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
 ,
,
где  — скорость вращения ротора асинхронного двигателя, об/мин
— скорость вращения ротора асинхронного двигателя, об/мин
 — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
— скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
 ,
,
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода[править | править код]
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
 .
.

В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором  , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При
, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При  поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Генераторный режим[править | править код]
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой  , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне
, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне  , то есть оно может принимать любые отрицательные значения.
, то есть оно может принимать любые отрицательные значения.
Режим торможения противовключением[править | править код]
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
![{displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7dc87f3dc0378759f68eb38b2d99074d1b1340a)
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне  .
.
Критическое скольжение[править | править код]
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература[править | править код]
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
|
U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
|
|
| Полезная мощность на валу, кВт |
|
Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
|
|
| Вращающий момент двигателя, кГм |
|
nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
|
f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
|
|
| Скорость вращения ротора при нагрузке, об/мин |
|
|
| ЭДС обмоток статора и ротора, В |
|
kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
| Коэффициенты трансформации по напряжению и по току |
|
w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
|
zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
| Ток холостого хода, А |
|
Iном. – номинальный ток двигателя, А |
| Критическое скольжение |
|
sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
|
Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
|
|
| КПД двигателя при введении добавочного сопротивления в ротор |
|
|
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
|
U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателя
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Содержание
- 1 Что представляет собой скольжение асинхронной машины
- 2 Скольжение в разных условиях работы привода
- 3 Как можно измерить показатель S?
Скольжение может изменяться. Это зависит о того, в каком режиме работает электродвигатель, величины напряжения сети и нагрузки на машину. Но что же это за характеристика и от чего она зависит? Разберемся ниже!

Что представляет собой скольжение асинхронной машины
В целом, принцип, по которому происходит работа трехфазного мотора очень прост. К обмотке статора подают напряжение, питающее движок. Благодаря ему появляется магнитный поток, смещенный на 120 градусов в каждой из трех фаз. А тот поток, который носит имя суммирующего будет еще и вращающимся.
Обмотка якоря – замкнутый контур. В ней появляется электродвижущая сила (ЭДС), а магнитный поток, возникающей не без ее помощи, приводит ротор в работу: он начинает вращаться. Электромагнитный момент всегда будет пытаться сравнять темпы двух полей главных элементов привода: статора и ротора.
Величина, которая определяет разницу между скоростями вращения вышеописанных магнитных полей и есть то самое скольжение. Мы все знаем, что ротор никогда не будет поспевать за статором, значение это никогда не будет больше единицы. Измерение можно проводить как в процентах, так и в относительных величинах.
Чтобы рассчитать величину скольжения (S), нужно знать показатель частоты, с которой вращается магнитное поле (n1) и частоту, с которой вращается магнитное поле в роторе. Формула, по которой производится расчет, выглядит так:

Скольжение – чрезвычайно важная характеристика мотора. Она описывает то, насколько исправна работа машины.
Скольжение в разных условиях работы привода
Если режим работы агрегата – холостой, искомый показатель всегда будет близок к нулевому значению или, по крайней мере, не превысит 3%. Это связано с тем, что n1 будет практически равен n2. Несмотря на то, что значение всегда близко к нулю, нулевым оно быть не может, потому что поля ротора и статора не пересекаются. Другими словами, вращение мотора отсутствует, как и подача на него напряжения.
Скольжение (если считать его в процентах) не будет нулевым даже в том случае, когда электродвигатель находится в режиме идеального холостого хода. Зато, если агрегат запущен в режиме генератора, S может быть отрицательным.
Такой режим (в нем ротор вращается противоположно относительно статора) будет показывать S, значениям бывают разными, но изменяются только в следующих пределах:
-∞<S<0
Надо отметить, что есть также электромагнитное торможение или противовключение якоря. В таком случае скольжение может быть больше, чем единица и положительным.

Рисунок 1
Частота тока в катушках якоря (f1) равна частоте сетевого тока, но только при пуске агрегата. Если нагрузка номинальная, то частоту электротока (f2) можно высчитать по формуле ниже:
f2=S*f1
Якорный ток имеет прямую зависимость от его индуктивного сопротивления. Это значит, что электроток в якоре зависит от скольжения асинхронного электромотора. Момент вращения агрегата также зависит от S. Его определяют показатели магнитного потока, угла сдвига между электродвижущей силой и якорным электротоком.
Как видно из всего вышесказанного, чтобы провести детальное исследование всех параметров электропривода, нужно установить зависимость. Она схематически изображена на рисунке 1.
Это, в свою очередь, означает, что если ввести в якорную цепь асинхронного двигателя, ротор которого фазный, дополнительное сопротивление, можно регулировать изменение момента в нем, если значения скольжения S различны.
Если ротор в приводе короткозамкнут, момент можно регулировать с использованием преобразователя частоты или двигателя с переменными параметрами.
Если нагрузка на электродвигатель номинальная, S будет равно значениям от 8% до 2%. Это скольжение будет носить название номинального.
Увеличивая нагрузку на вал ротора (то есть момент), будет происходить пропорциональное увеличение величины скольжения.
Выражаясь проще, можно сказать, что роторное магнитное поле никогда не будет быстрее статорного. То есть первое будет тормозить.
Увеличивая скольжение, вы, конечно, добьетесь пропорционального роста тока в якоре. И момент, естественно, тоже вырастет. Но нужно всегда учитывать, что вместе с этим будут расти и активные потери ротора (то есть произойдет увеличение сопротивления). Это повлияет на снижение силы тока и уменьшение коэффициента мощности. Результат: рост момента будет медленнее, чем скольжения.
Критическое скольжение – максимальная величина момента, которой можно достигнуть при определенном S. После того, как момент станет максимальным, он начнет идти на убывание. Обозначаю показатель, как правило, через Sкр.
Механическая характеристика, в своем графическом проявлении, выглядит следующим образом:

В данном выражении (его еще называют формулой Клосса) используется величина критического момента (Мк). Его и определяет величина критического скольжения.
График строят, основываясь на характеристиках из документов асинхронной машины. Все вопросы, возникающие по поводу асинхронного агрегата, работающего в режиме движка, решают с помощью данного графика.
Величина допустимого значения мгновенного перегруза электромотора определяется критическим моментом. В случае развития еще более критического М (и, конечно же, увеличения Sкр), можно наблюдать опрокидывание агрегата. Когда это происходит, машина просто перестает работать и выключается. Это аварийный режим.

Как можно измерить показатель S?
Для измерения скольжения в электрическом двигателе асинхронного типа есть несколько подходов. При значительной разнице частоты работы от синхронной, S измеряют тахометром или тахогенератором. Это специальный прибор, подключенный к валу электропривода.
Стробоскопический метод. В этом варианте используют неоновую лампу. Замеры можно произвести только в случае, когда скольжение не превышает пяти процентов. На вал движка нужно нанести черту с помощью мелка. Вместе этого можно установить стробоскопический диск. Затем на них светят лампой и считают, сколько раз вал сделал оборот за какой-либо отрезок времени. Окончательные расчеты проводят с помощью специальных формул. В этом методе допустимо использование самого обычного стробоскопа. Его пример приведен ниже.
Третий способ найти скольжение – индуктивная катушка. Как это сделать? Возьмите катушку от электромагнитного реле (контактор) постоянного тока. Она подойдет лучшего всего, так как на ней достаточно много витков, около 20 000. А для таких замеров их требуется не менее 3000. Подключите к катушке точный милливольтметр (он подойдет из-за своей чувствительности). Затем расположите катушку там, где заканчивается вал якоря.
После этого нужно посчитать число совершенных колебаний и по специальной формуле определить скольжение.
Кстати, если ротор у асинхронного мотора фазный, то S можно вычислить, используя магнитоэлектрический амперметр. Устройство подключают к любой их трех фаз в якоре, считают количество колебаний стрелки (за какое-то время) и считают нужный показатель по той формуле, которую используют в методе с катушкой индуктивности.
