Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 6 июня 2021 года; проверки требуют 2 правки.
У этого термина существуют и другие значения, см. норма.
Норма — функционал, заданный на векторном пространстве и обобщающий понятие длины вектора или абсолютного значения числа.
Определение[править | править код]
Норма вектора[править | править код]
Норма в векторном пространстве 

-
(неравенство треугольника);


Эти условия являются аксиомами нормы.
Векторное пространство с нормой называется нормированным пространством, а условия (1—3) — также аксиомами нормированного пространства.
Из аксиом нормы очевидным образом вытекает свойство неотрицательности нормы:

Действительно, из третьего свойства следует: 

Чаще всего норму обозначают в виде: 



Вектор с единичной нормой 
Любой ненулевой вектор 
Норма матрицы[править | править код]
Нормой матрицы 

, причём
только при
;
, где
;
;
.
Если выполняется также и четвёртое свойство, норма называется субмультипликативной. Матричная норма, составленная как операторная, называется подчинённой по отношению к норме, использованной в пространствах векторов. Очевидно, что все подчинённые матричные нормы субмультипликативны.
Матричная норма 






для всех 
Норма оператора[править | править код]
Норма оператора
,
- где
в нормированное пространство
.
- где
Это определение эквивалентно следующему:

- Свойства операторных норм:
;
В конечномерном случае, оператору в некотором базисе соответствует матрица — матрица оператора. Если норма на пространстве(пространствах), где действует оператор, допускает одно из стандартных выражений в базисе, то свойства нормы оператора повторяют аналогичные свойства нормы матрицы.
Свойства нормы[править | править код]
[косинус угла]




Эквивалентность норм[править | править код]
Примеры[править | править код]
Линейные нормированные пространства[править | править код]

- Любое предгильбертово пространство можно считать нормированным, так как скалярное произведение порождает естественную норму

где 
В частности:
- Нормы функций в
— пространстве вещественных (или комплексных) непрерывных функций на отрезке [0,1]:
«L0 норма»[править | править код]
Особым случаем является 
Некоторые виды матричных норм[править | править код]
- Порожденные нормы
:
- Здесь
— сопряжённая к
— след матрицы.
Связанные понятия[править | править код]
Топология пространства и норма[править | править код]
Норма задаёт на пространстве метрику (в смысле — функцию расстояния метрического пространства), порождая таким образом метрическое пространство, а значит топологию, базой которой являются всевозможные открытые шары, то есть множества вида 
См. также[править | править код]
- Полунорма
- Метрика
- Скалярное произведение
Примечания[править | править код]
- ↑ М. Вербицкий. Начальный курс топологии. Задачи и теоремы. — Litres, 2018-12-20. — С. 163-164. — 346 с.
Норма (модуль, длина) вектора
В пространстве V каждому вектору x∈V ставим в соответствие некоторое неотрицательное число  так, чтобы для произвольных векторов x,y ∈V и произвольного скаляра λ выполнялись следующие условия:
так, чтобы для произвольных векторов x,y ∈V и произвольного скаляра λ выполнялись следующие условия:
 тогда и только тогда, когда x=0.
тогда и только тогда, когда x=0. .
. (неравенство треугольника).
(неравенство треугольника).
называется нормой (длиной, модулем) вектора x∈V .
Примеры норм в линейных пространствах
1. max-норма, или m – норма:
2. l-норма:

3. Евклидова норма:
Пример вычисления нормы (длины, модуля) вектора
Вычислим нормы вектора 
1. m-норма: 
2. l-норма: 
3. Евклидова норма:
|
|


Вычисление нормы и чисел обусловленности матрицы
1
норма матрицы представляет из себя
максимальное из чисел, полученных при
сложении всех элементов каждого столбца,
взятых по модулю. Не путайте со сложением
матриц!
Р
ассмотрим
на примере: пусть дана матрица размера
3х2. В первом столбце стоят элементы: 8,
3, 8. Все элементы положительные. Найдем
их сумму: 8+3+8=19. В втором столбце стоят
элементы: 8, -2, -8. Два элемента – отрицательные,
поэтому при сложении этих чисел,
необходимо подставлять модуль этих
чисел (т.е. без знаков “минус”).
Найдем их сумму: 8+2+8=18. Максимальное из
этих двух чисел – это 19. Значит первая
норма матрицы равна 19.
2
норма матрицы представляет из себя
квадратный корень из суммы квадратов
всех элементов матрицы. А это значит мы
возводим в квадрат все элементы матрицы,
затем складываем полученные значения
и из результата извлекаем квадратный
корень.
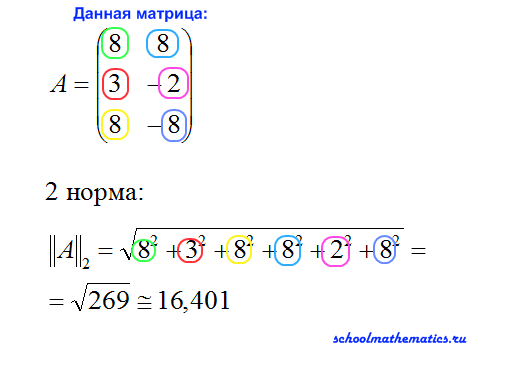
В
нашем случае, 2 норма матрицы получилась
равна квадратному корню из 269. На схеме,
я приближенно извлекла квадратный
корень из 269 и в результате получила
приблизительно около 16,401. Хотя более
правильно не извлекать корень.
3
норма матрицы представляет из себя
максимальное из чисел, полученных при
сложении всех элементов каждой строки,
взятых по модулю.
В
нашем примере: в первой строке стоят
элементы: 8, 8. Все элементы положительные.
Найдем их сумму: 8+8=16. В второй строке
стоят элементы: 3, -2. Один из элементов
отрицательный, поэтому при сложении
этих чисел, необходимо подставлять
модуль этого числа. Найдем их сумму:
3+2=5. В третьей строке стоят элементы 8,
и -8. Один из элементов отрицательный,
поэтому при сложении этих чисел,
необходимо подставлять модуль этого
числа. Найдем их сумму: 8+8=16. Максимальное
из этих трех чисел – это 16. Значит третья
норма матрицы равна 16.
Число
обусловленности квадратной матрицы A
определяется, как
k(A)
= ||A||·||A -1||

Число
обусловленности имеет следующее
значение: если машинная точность, с
которой совершаются все операции с
вещественными числами, равна ε, то при
решении системы линейных уравнений Ax
= b результат будет получен с относительной
погрешностью порядка ε·k(A). Хотя число
обусловленности матрицы зависит от
выбора нормы, если матрица хорошо
обусловлена, то её число обусловленности
будет мало при любом выборе нормы, а
если она плохо обусловлена, то её число
обусловленности будет велико при любом
выборе нормы. Таким образом, обычно
норму выбирают исходя из соображений
удобства. На практике наиболее широко
используют 1-норму, 2-норму и ∞-норму,
задающиеся формулами:
В
Matlab
используется следующие функции поиска
нормы:
Пусть
А —матрица. Тогда n=norm(A) эквивалентно
п=погп(А,2) и возвращает вторую норму, т.
е. самое большое сингулярное число А.
Функция n=norm(A, 1) возвращает первую норму,
т. е. самую большую из сумм абсолютных
значений элементов матрицы по столбцам.
Норма неопределенности n=norm(A, inf) возвращает
самую большую из сумм абсолютных значений
элементов матрицы по рядам. Норма
Фробениуса
(Frobenius) norm(A, ‘fro’) = sqrt(sum(diag(A’A))).
Пример:
»
A=[2,3,1;1,9,4;2,6,7]
A
=
2
3 1
1
9 4
2
6 7
»
norm(A,1)
ans
=
18
Числа
обусловленности матрицы определяют
чувствительность решения системы
линейных уравнений к погрешностям
исходных данных. Следующие функции
позволяют найти числа обусловленности
матриц.
cond(X)
— возвращает число обусловленности,
основанное на второй норме, то есть
отношение самого большого сингулярного
числа X к самому малому. Значение cond(X),
близкое к 1, указывает на хорошо
обусловленную матрицу;
с
= cond(X,p) — возвращает число обусловленности
матрицы, основанное на р-норме:
norm(X,p)*norm(inv(X),p), где р определяет способ
расчета:
р=1
— число обусловленности матрицы,
основанное на первой норме;
р=2
— число обусловленности матрицы,
основанное на второй норме;
p=
‘fro’ — число обусловленности матрицы,
основанное на норме Фробе-ниуса
(Frobenius);
р=’inf’
— число обусловленности матрицы,
основанное на норме неопределенности.
с
= cond(X) — возвращает число обусловленности
матрицы, основанное на второй норме.
Пример:
»
d=cond(hilb(4))
d
=
1.5514е+004
condeig(A)
— возвращает вектор чисел обусловленности
для собственных значений А. Эти числа
обусловленности — обратные величины
косинусов углов между левыми и правыми
собственными векторами;
[V.D.s]
= condeig(A) — эквивалентно
[V,D] = eig(A): s = condeig(A);.
Большие
числа обусловленности означают, что
матрица А близка к матрице с кратными
собственными значениями.
Пример:
»
d=condeig(rand(4))
d
=
1.0766
1.2298
1.5862
1.7540
rcond(A)
— возвращает обратную величину
обусловленности матрицы А по первой
норме, используя оценивающий обусловленность
метод LAPACK. Если А — хорошо обусловленная
матрица, то rcond(A) около 1.00, если плохо
обусловленная, то около 0.00. По сравнению
с cond функция rcond реализует более
эффективный в плане затрат машинного
времени, но менее достоверный метод
оценки обусловленности матрицы.
Пример:
»
s=rcond(hilb(4))
s
=
4.6461е-005
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
-
У этого термина существуют и другие значения, см. норма.
Норма — понятие, обобщающее абсолютную величину (модуль) числа, а также длину вектора на случай элементов (векторов) линейного пространства.
Норма в векторном линейном пространстве 
, причём
только при
;
для всех
(неравенство треугольника);
для каждого скаляра
.
Норма 
Примеры норм в линейных пространствах
Топология пространства и норма
Норма задаёт на пространстве топологию, базой которой являются всевозможные открытые шары, то есть множества вида 
Эквивалентность норм
Две нормы 





Операторная норма
Норма оператора
- где
- где
- Свойства операторных норм:
, причём
;
.
Матричная норма
Нормой матрицы
Если выполняется также и четвёртое свойство, норма называется мультипликативной. Матричная норма, составленная как операторная, называется подчинённой по отношению к норме, использованной в пространствах векторов. Очевидно, что все подчинённые матричные нормы мультипликативны. Немультипликативные нормы для матриц являются простыми нормами, заданными в линейных пространствах матриц.
Виды матричных норм
- m-норма:
- l-норма:
- Евклидова норма:
- Сингулярная норма (подчинена евклидовой норме векторов):




ca:Norma (matemàtiques)
da:Norm (matematik)
he:נורמה (מתמטיקה)
nl:Norm (wiskunde)
pl:Norma (matematyka)
sv:Norm (matematik)
ur:امثولہ (ریاضی)
Численные методы линейной алгебры
Основные положения численного анализа
Классическим средством изучения математических моделей и исследований на их основе свойств реальных объектов являются аналитические методы, позволяющие получать точные решения в виде математических формул. Эти методы дают наиболее полную информацию о решении задачи, и они до настоящего времени не утратили своего значения. Однако, к сожалению, класс задач, для которого они могут использоваться, весьма ограничен. Поэтому решение, как правило, осуществляется численными методами.
Численные методы — это методы приближенного решения задач прикладной математики, основанные на реализации алгоритмов, соответствующих математическим моделям. Наука, изучающая численные методы, называется также численным анализом, или вычислительной математикой. Численные методы, в отличие от аналитических, дают не общие, а частные решения. При этом требуется выполнить достаточное количество арифметических и логических действий над числовыми и логическими массивами.
В численном анализе используются два класса численных методов:
1. Прямые методы, позволяющие найти решение за определенное число операций.
2. Итерационные методы, основанные на использовании повторяющегося (циклического) процесса и позволяющие получить решение в результате последовательных приближений. Операции, входящие в повторяющийся процесс, составляют итерацию.
Решения, получаемые численными методами, в силу их приближенности содержат некоторые погрешности. Рассмотрим их источники и типы.
Один из типов погрешностей обусловлен неадекватностью выбранной математической модели исходной физической. Эта неадекватность в большей или меньшей степени присуща всем приближенно решаемым задачам. Данная погрешность является неустранимой. Неточность (неопределенность) задания исходных данных приводит также к неустранимым погрешностям.
Если мы устраним неопределенность в исходных данных и найдем решение с помощью какого-либо численного метода, то получим результат, не в точности соответствующий исходным данным в силу погрешности численного метода. В компьютере все числа представляются в конечном виде, и поэтому при использовании вычислительного алгоритма реализуются ошибки арифметических и других операций над числами, а также ошибки округления.
Дадим некоторые понятия из теории погрешностей вычислительных действий над приближенными величинами.
Пусть [math]x[/math] — точное, но, как правило, неизвестное значение некоторой величины, а [math]widehat{x}[/math] — ее известное приближенное значение.
Абсолютной погрешностью приближения [math]widehat{x}[/math] называется разность [math]Delta=bigl|x-widehat{x}bigr|[/math] (в общем случае [math]Deltawidehat{x}[/math] имеет размерность величины [math]x[/math]).
Относительная погрешность приближения [math]widehat{x}[/math] обозначается [math]delta[/math] и выражается отношением [math]delta= frac{Deltawidehat{x}}{|widehat{x}|}[/math] ([math]delta[/math] — безразмерная величина, [math]widehat{x}ne0[/math]). Часто величина [math]delta[/math] вычисляется в процентах, и тогда она умножается на сто.
Так как величина [math]x[/math], как правило, неизвестна, а погрешность необходимо определять, то в рассмотрение вводится предельная абсолютная погрешность [math]Delta(widehat{x}):[/math]
[math]Deltawidehat{x}= |x-widehat{x}|leqslant Delta(widehat{x}).[/math]
Раскрывая в этом неравенстве модуль, получаем соотношение, задающее отрезок, которому принадлежит точное значение: [math]widehat{x}-Delta(widehat{x}) leqslant xleqslant Delta(widehat{x})[/math]. Таким образом, величина [math]x[/math] находится в ∆-окрестности (дельта-окрестности), определяемой величинами [math]widehat{x}[/math] и [math]Delta(widehat{x})[/math].
Предельная относительная погрешность приближения [math]widehat{x}[/math] определяется отношением [math]delta(widehat{x})= frac{Delta(widehat{x})}{|widehat{x}|}[/math].
Такие погрешности оцениваются при рассмотрении численных методов. Эти оценки могут производиться до выполнения вычислений (априорные оценки) и после них (апостериорные оценки).
Как правило, численный алгоритм решения задачи завершается, если погрешность меньше заданной заранее величины.
Норма матриц: понятие, определение, примеры
При решении многих практических задач необходимо как-то “измерять” матрицы, чтобы говорить, что одна матрица больше другой. Правило, по которому матрице (в частности, матрице-столбцу) ставится в соответствие некоторое неотрицательное число, имеющее смысл меры, определяет понятие норма матрицы.
Нормой матрицы-столбца [math]x=begin{pmatrix}x_1\vdots\x_nend{pmatrix}[/math] называется функция [math]|x|[/math], удовлетворяющая следующим аксиомам:
1. [math]|x|geqslant0[/math] для любого столбца [math]x[/math], причем [math]|x|=0[/math] в том и только в том случае, если [math]x[/math] — нулевой столбец;
2. [math]|alpha x|=|alpha|cdot|x|[/math] для любого действительного числа [math]alpha[/math];
3. [math]|x+y|leqslant|x|+|y|[/math] для любых двух столбцов [math]x[/math] и [math]y[/math] размеров [math](ntimes1)[/math].
Аксиома 3 называется неравенством треугольника.
Примером нормы матрицы-столбца может быть семейство норм
[math]|x|= Biggl(sum_{i=1}^{n}|x_i|^pBiggr)^{1/p},[/math]
где при любом целом положительном [math]p[/math] определяется функция, удовлетворяющая условиям 1-3.
Приведем часто используемые нормы матриц-столбцов.
1. [math]|x|_1=max_{iinmathbb{N}}|x_i|[/math] — максимум среди модулей элементов столбца;
2. [math]textstyle{|x|_2=sumlimits_{i=1}^{n}|x_i|}[/math] — сумма модулей элементов столбца;
3. [math]textstyle{|x|_3=sqrt{sumlimits_{i=1}^{n}x_i^2}}[/math] — квадратный корень из суммы квадратов элементов.
Последняя норма называется евклидовой, так как совпадает с модулем столбца (длиной вектора), т.е. [math]|x|_3=|x|=sqrt{x^Tx}[/math].
Замечания 10.1
1. Можно показать, что справедливы следующие соотношения
[math]|x|_2geqslant|x|_3geqslant|x|_1[/math], а также [math]sqrt{n}cdot|x|_3geqslant|x|_2,~ sqrt{n}cdot|x|_1geqslant|x|_3[/math].
2. Норма может быть использована при анализе сходимости последовательностей матриц-столбцов.
Последовательность матриц-столбцов [math]bigl{x^{(1)},x^{(2)},ldots,x^{(k)},ldotsbigr}[/math] сходится к столбцу [math]x_{ast}[/math], если [math]lim_{kto+infty}x_i^{(k)}=x_{ast i}[/math], для всех [math]i=1,2,ldots,n[/math]. Для того чтобы последовательность [math]bigl{x^{(1)},x^{(2)}, ldots,x^{(k)},ldotsbigr}[/math] сходилась к столбцу х., необходимо и достаточно, чтобы [math]lim_{kto+infty}bigl|x^{(k)}-x_{ast}bigr|=0[/math].
3. Для определения псевдорешений систем линейных алгебраических уравнений ранее использовалась евклидова норма [math]|x|_3[/math].
4. Нормы позволяют оценить скорость сходимости последовательностей. Рассмотрим последовательность [math]bigl{x^{(k)}bigr}[/math], сходящуюся к [math]x_{ast}[/math]. Предположим, что все ее элементы различны и ни один из них не совпадает с [math]x_{ast}[/math]. Наиболее эффективный способ оценивания скорости сходимости состоит в сопоставлении расстояния [math]bigl|x^{(k+1)}-x_{ast}bigr|[/math] между [math]x^{(k+1)}[/math] и [math]x_{ast}[/math] с расстоянием [math]bigl|x^{(k)}-x_{ast}bigr|[/math] между [math]x^{(k)}[/math] и [math]x_{ast}[/math].
Последовательность [math]bigl{x^{(k)}bigr}[/math] называется сходящейся с порядком [math]{p}[/math], если [math]{p}[/math] — максимальное число, для которого
[math]0leqslant lim_{kto+infty} frac{|x^{(k+1)}-x_{ast}|}{|x^{(k)}-x_{ast}|^p} < +infty.[/math]
Поскольку величина [math]{p}[/math] определяется предельными свойствами [math]bigl{x^{(k)}bigr}[/math], она называется асимптотической скоростью сходимости.
Если последовательность [math]bigl{x^{(k)}bigr}[/math] — сходящаяся с порядком [math]{p}[/math], то число
[math]c=lim_{kto+infty} frac{|x^{(k+1)}-x_{ast}|}{|x^{(k)}-x_{ast}|^p},.[/math]
называется асимптотическим параметром ошибки. Если [math]p=1,~ c<1[/math], то сходимость линейная, если [math]p=2[/math] — квадратичная, если [math]p=3[/math] — кубическая и т.д. Если [math]p>1[/math] или [math]p=1,~c=0[/math], то сходимость сверхлинейная. Линейная сходимость является синонимом сходимости со скоростью геометрической профессии. Сверхлинейная сходимость является более быстрой, чем определяемая любой геометрической прогрессией.
Пример 10.1. Вычислить нормы матрицы-столбца [math]x=begin{pmatrix} 1&-2&3&-4 end{pmatrix}^T[/math].
Решение.
[math]begin{aligned} mathsf{1)}~, |x|_1&= max_{iinmathbb{N}}|x_i|= maxbigl{|1|,|-2|,|3|,|-4|bigr}=4,;\[5pt] mathsf{2)}~, |x|_2&= sum_{i=1}^{4}|x_i|= |1|+|-2|+|3|+|-4|=10,;\[5pt] mathsf{3)}~, |x|_3&= sqrt{sum_{i=1}^{4}x_i^2}= sqrt{1^2+(-2)^2+3^2+(-4)^2}=sqrt{30},. end{aligned}[/math]
Заметим, что свойство [math]|x|_2geqslant|x|_3geqslant|x|_1[/math], очевидно, выполняется.
Пусть [math]A[/math] — произвольная матрица размеров [math](mtimes n)[/math].
Нормой матрицы [math]A[/math] называется функция [math]|A|[/math], удовлетворяющая следующим аксиомам:
1) [math]|A|geqslant0[/math] для любой матрицы [math]A[/math], причем [math]|A|=0[/math] в том и только в том случае, если [math]A[/math] — нулевая матрица;
2) [math]|alphacdot A|=|alpha|cdot|A|[/math] для любого действительного числа [math]alpha[/math];
3) [math]|A+B|leqslant|A|+|B|[/math] для любых двух матриц [math]A[/math] и [math]B[/math] размеров [math](mtimes n)[/math] (неравенство треугольника);
4) [math]|Acdot B|leqslant|A|cdot|B|[/math] для любых двух матриц, у которых определено произведение.
Матричные нормы удобно определять через нормы матриц-столбцов. Для этого, задавшись какой-нибудь нормой для матриц-столбцов, рассматриваются значения [math]|Ax|[/math] при всевозможных х, удовлетворяющих условию [math]|x|=1[/math]. Максимальное из этих значений, которое найдется всегда, берется в качестве нормы матрицы [math]Acolon, |A|= max_{|x|=1}|Ax|[/math]. Такую матричную норму называют индуцированной.
Заметим, что в качестве определения индуцированной матричной нормы часто используется выражение [math]|A|=sup_{xne0}frac{|Ax|}{|x|}[/math], характеризующее максимальную величину, на которую преобразование, описываемое матрицей [math]A[/math], может растянуть любой ненулевой вектор в заданной норме.
Наиболее употребительными являются следующие формулы для вычисления значений норм матриц с действительными элементами.
1) [math]textstyle{|A|_1= maxlimits_{1leqslant ileqslant m}sumlimits_{j=1}^{n}|a_{ij}|}[/math] — максимум суммы модулей элементов в строке;
2) [math]textstyle{|A|_2= maxlimits_{1leqslant jleqslant n}sumlimits_{i=1}^{m}|a_{ij}|}[/math] максимум суммы модулей элементов в столбце;
3) [math]|A|_3=sqrt{lambda_{max}(A^TA)}[/math] — квадратный корень из максимального собственного значения [math]lambda_i[/math] матрицы [math]A^TA[/math];
4) [math]textstyle{|A|_4= sqrt{sumlimits_{i=1}^{m} sumlimits_{j=1}^{n} a_{ij}^2}}[/math] — квадратный корень из суммы квадратов элементов.
Заметим, что вычисление нормы [math]|A|_3= sqrt{lambda_{max}(A^TA)}[/math] связано с весьма трудоемкими операциями. Поскольку справедливо неравенство
[math]|A|_3=sqrt{lambda_{max}(A^TA)} leqslant |A|_4= sqrt{sumlimits_{i=1}^{m} sum_{j=1}^{n} a_{ij}^2},[/math]
то норма [math]|A|_4[/math] часто используется в оценках вместо [math]|A|_3[/math]. Норма [math]|A|_4[/math] возникает, если матрице [math]A[/math] поставить в соответствие “длинный столбец”:
[math]begin{pmatrix}a_{11},a_{21},ldots, a_{m1},a_{12},a_{22},ldots, a_{m2},ldots,a_{nn} end{pmatrix}^T[/math] и применить норму [math]|x|_3[/math].
Пример 10.2. Вычислить нормы матриц [math]A=begin{pmatrix}1&-2&3\ 4&5&-6\ -7&8&9 end{pmatrix}!,~ B=begin{pmatrix}1&0&0\ 0&1&0\ 0&0&1 end{pmatrix}[/math].
Решение. а)
[math]begin{aligned}|A|_1&= maxbigl{|1|+|-2|+|3|;, |4|+|5|+|-6|;, |-7|+|8|+|9|bigr}= max{6;,15;,24}=24;\[5pt] |A|_2&= maxbigl{|1|+|4|+|-7|;, |-2|+|5|+|8|;, |3|+|-6|+|9|bigr}= max{12;15;18}=18;\[5pt] |A|_4&= sqrt{1^2+(-2)^2+3^2+4^2+5^2+(-6)^2+(-7)^2+8^2+9^2}=\[2pt] &=sqrt{1+4+9+16+25+36+49+64+81}= sqrt{285};end{aligned}[/math]
б) [math]|B|_1=|B|_2=1,,~ |B|_4=sqrt{1+1+1}=sqrt{3}[/math].
Норма матриц может быть использована при анализе сходимости различных численных процедур. Пусть имеется последовательность матриц [math]bigl{A^{(1)},ldots,A^{(k)},ldotsbigr}[/math] размеров [math]mtimes n[/math]. Матрица [math]A[/math] называется пределом последовательности матриц [math]bigl{A^{(1)},ldots,A^{(k)},ldotsbigr}[/math], если [math]lim_{kto+infty}a_{ij}^{(k)}=a_{ij}[/math] для всех [math]i=1,ldots,m[/math] и [math]j=1,ldots,n[/math]. Это обозначается [math]lim_{kto+infty}A^{(k)}=A[/math].
Для сходимости последовательности матриц [math]bigl{A^{(1)},ldots,A^{(k)},ldotsbigr}[/math] к матрице [math]A[/math] необходимо и достаточно, чтобы [math]lim_{kto+infty}bigl|A^{(k)}-Abigr|=0[/math]. При этом последовательность, составленная из норм матриц [math]A^{(k)}[/math], сходится к норме матрицы [math]A[/math], т.е. [math]lim_{kto+infty} bigl|A^{(k)}bigr|=|A|[/math].
Отметим некоторые свойства предела матриц. Если [math]lim_{kto +infty}A^{(k)}=A,~ lim_{kto+infty}B^{(k)}=B[/math], то:
[math]begin{array}{ll}mathsf{1)}~ limlimits_{kto+infty}bigl[A^{(k)}pm B^{(k)}bigr]=Apm B;&qquad mathsf{2)}~ limlimits_{kto+infty}bigl[A^{(k)}cdot B^{(k)}bigr]=Acdot B;\\[-5pt] mathsf{3)}~ limlimits_{kto+infty}bigl[A^{(k)}bigr]^{-1}=A^{-1};&qquad mathsf{4)}~ limlimits_{kto+infty}bigl[CA^{(k)}bigr]=CA,~ limlimits_{kto+infty}bigl[A^{(k)}Dbigr]=AD.end{array}[/math]
где считается, что все операции определены.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
