Существует ряд заданий, которым для решения необходимо нормальный вектор на плоскости, чем саму плоскость. Поэтому в этой статье получим ответ на вопрос определения нормального вектора с примерами и наглядными рисунками. Определим векторы трехмерного пространства и плоскости по уравнениям.
Нормальный вектор плоскости – определение, примеры, иллюстрации
Чтобы материал легко усваивался, необходимо предварительно изучить теорию о прямой в пространстве и представление ее на плоскости и векторы.
Нормальным вектором плоскости считается любой ненулевой вектор, который лежит на перпендикулярной к данной плоскости прямой.
Отсюда следует, что имеет место существование большого количества нормальных векторов в данной плоскости. Рассмотрим на рисунке, приведенном ниже.

Нормальные векторы располагаются на параллельных прямых, поэтому они все коллинеарны. То есть, при нормальном векторе n→ , расположенном в плоскости γ, вектор t·n→, имея ненулевое значение параметра t, также нормальный вектор плоскости γ. Любой вектор может быть рассмотрен как направляющий вектор прямой, которая перпендикулярна этой плоскости.
Имеются случаи совпадения нормальных векторов плоскостей из-за перпендикулярности одной из параллельных плоскостей, так как прямая перпендикулярна и второй плоскости. Отсюда следует, что нормальные векторы перпендикулярных плоскостей должны быть перпендикулярными.
Рассмотрим на примере нормального вектора на плоскости.
Задана прямоугольная система координат Охуz в трехмерном пространстве. Координатные векторы i→, j→, k→ считаются нормальными векторами плоскостей Oyz, Oxz и Oxy. Это суждение верно, так как i→, j→, k→ ненулевые и расположены на координатных прямых Ox, Oy и Oz. Эти прямые перпендикулярны координатным плоскостям Oyz, Oxz и Oxy.
Координаты нормального вектора плоскости – нахождение координат нормального вектора плоскости из уравнения плоскости
Статья предназначена для того, чтобы научить находить координаты нормального вектора плоскости при известном уравнении плоскости прямоугольной системы координат Охуz. Для определения нормального вектора n→=(A, B, C) в плоскости необходимо наличие общего уравнения плоскости, имеющее вид Ax+By+Cz+D=0. То есть достаточно иметь уравнение плоскости, тогда появится возможность для нахождения координат нормального вектора.
Найти координаты нормального вектора, принадлежащего плоскости 2x-3y+7z-11=0.
Решение
По условию имеем уравнение плоскости. Необходимо обратить внимание на коэффициенты, так как они и являются координатами нормального вектора заданной плоскости. Отсюда получаем, что n→=(2, -3, 7) – это нормальный вектор плоскости. Все векторы плоскости задаются при помощи формулы t·n→=2·t, -3·t, 7·t, t является любым действительным числом не равным нулю.
Ответ: n→=(2, -3, 7).
Определить координаты направляющих векторов заданной плоскости x+2z-7=0.
Решение
По условию имеем, что дано неполное уравнение плоскости. Чтобы увидеть координаты, необходимо преобразовать уравнение x+2z-7=0 к виду 1·x+0·y+2z-7=0. Отсюда получим, что координаты нормального вектора данной плоскости равны (1, 0, 2). Тогда множество векторов будет иметь такую форму записи (t, 0, 2·t), t∈R, t≠0.
Ответ: (t, 0, 2·t), t∈R, t≠0.
При помощи уравнения плоскости в отрезках, имеющего вид xa+yb+zc=1, и общего уравнения плоскости возможна запись нормального вектора этой плоскости, где координаты равны 1a, 1b, 1c.
Знания о нормальном векторе позволяют с легкостью решать задачи. Часто встречающимися задачами являются задания с доказательствами параллельности или перпендикулярности плоскостей. Заметно упрощается решение задач на составление уравнений заданной плоскости. Если имеется вопрос о нахождении угла между плоскостями или между прямой и плоскостью, то формулы нормального вектора и нахождения его координат помогут в этом.

Преподаватель математики и информатики. Кафедра бизнес-информатики Российского университета транспорта
Как найти нормаль плоскости
Нормаль плоскости n (вектор нормали к плоскости) – это любой направленный перпендикуляр к ней (ортогональный вектор). Дальнейшие выкладки по определении нормали зависят от способа задания плоскости.
Инструкция
Если задано общее уравнение плоскости – AX+BY+CZ+D=0 или его форма A(x-x0)+B(y-y0)+C(z-z0)=0, то можно сразу записать ответ – n(А, В, С). Дело в том, что это уравнение было получено, как задача определения уравнения плоскости по нормали и точке.
Для получения общего ответа, вам понадобится векторное произведение векторов из-за того, что последнее всегда перпендикулярно исходным векторам. Итак, векторным произведением векторов, является некоторый вектор, модуль которого равен произведению модуля первого (а) на модуль второго (b) и на синус угла между ними. При этом этот вектор (обозначьте его через n) ортогонален a и b – это главное. Тройка этих векторов правая, то есть из конца n кратчайший поворот от a к b совершается против часовой стрелки.
[a,b] – одно из общепринятых обозначений векторного произведения. Для вычисления векторного произведения в координатной форме, используется вектор-определитель (см. рис.1)
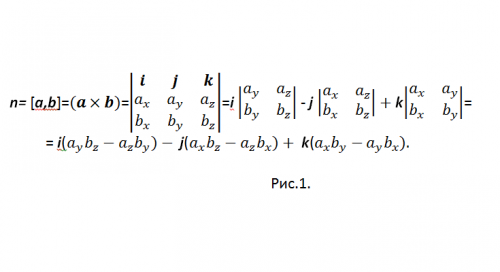
Для того чтобы не путаться со знаком «-», перепишите результат в виде: n={nx, ny, nz}=i(aybz-azby)+j(azbx-axbz)+k(axby-aybx), и в координатах: {nx, ny, nz}={(aybz-azby), (azbx-axbz), (axby-aybx)}.
Более того, дабы не путаться с численными примерами выпишете все полученные значения по отдельности: nx=aybz-azby, ny=azbx-axbz, nz=axby-aybx.
Вернитесь к решению поставленной задачи. Плоскость можно задать различными способами. Пусть нормаль к плоскости определяется двумя неколлинеарными векторами, причем сразу численно.
Пусть даны векторы a(2, 4, 5) и b(3, 2, 6). Нормаль к плоскости совпадает с их векторным произведением и, как только что было выяснено будет равна n(nx, ny, nz),
nx=aybz-azby, ny=azbx-axbz, nz=axby-aybx. В данном случае ax=2, ay=4, az=5, bx=3, by=2, bz=6. Таким образом,
nx=24-10=14, ny=12-15=-3, nz=4-8=-4. Нормаль найдена – n(14, -3, -4). При этом она является нормалью к целому семейству плоскостей.
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
5.2.3. Вектор нормали плоскости (нормальный вектор)
Вектор нормали плоскости – это вектор, который перпендикулярен данной плоскости. Очевидно, что у любой плоскости бесконечно много нормальных векторов.
Но для решения задач нам будет хватать и одного: если плоскость задана общим уравнением ![]() в прямоугольной (!) системе координат, то вектор
в прямоугольной (!) системе координат, то вектор ![]() является нормальным вектором данной плоскости.
является нормальным вектором данной плоскости.
Просто до безобразия! – всё, что нужно сделать – это «снять» коэффициенты из уравнения плоскости. И чтобы хоть как-то усложнить практику рассмотрим тоже простую, но очень важную задачу, которая часто встречается, причём, не только в геометрии:
Задача 134
Найти единичный нормальный вектор плоскости ![]() .
.
Решение: принципиально ситуация выглядит так:
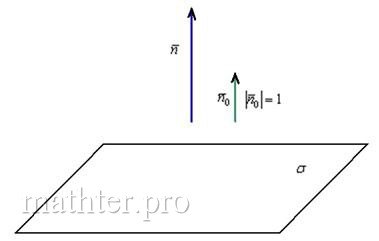
Сначала из уравнения плоскости «снимем» вектор нормали: ![]() .
.
И эту задачку мы уже решали: для того чтобы найти единичный вектор ![]() , нужно каждую координату вектора
, нужно каждую координату вектора ![]() разделить на длину вектора
разделить на длину вектора ![]() .
.
Вычислим длину вектора нормали: ![]()
![]()
Таким образом: ![]()
Контроль: , ОК
, ОК
Ответ: ![]()
Вспоминаем, что координаты этого вектора – есть в точности направляющие косинусы вектора ![]() :
: ![]() .
.
И, как говорится, обещанного три страницы ждут 🙂 – вернёмся к Задаче 130, чтобы выполнить её проверку. Напоминаю, что там требовалось построить уравнение плоскости по точке ![]() и двум векторам
и двум векторам ![]() , и в результате решения мы получили уравнение
, и в результате решения мы получили уравнение ![]() .
.
Проверяем:
Во-первых, подставим координаты точки ![]() в полученное уравнение:
в полученное уравнение:
![]()
![]() – получено верное равенство, значит, точка
– получено верное равенство, значит, точка ![]() лежит в данной плоскости.
лежит в данной плоскости.
На втором шаге из уравнения плоскости «снимаем» вектор нормали: ![]() . Поскольку векторы
. Поскольку векторы ![]() параллельны плоскости, а вектор
параллельны плоскости, а вектор ![]() ей перпендикулярен, то должны иметь место следующие факты:
ей перпендикулярен, то должны иметь место следующие факты: ![]() . Ортогональность векторов элементарно проверяется с помощью скалярного произведения:
. Ортогональность векторов элементарно проверяется с помощью скалярного произведения:
![]()
Вывод: уравнение плоскости найдено правильно.
В ходе проверки я фактически процитировал следующее утверждение теории: вектор ![]() параллелен плоскости
параллелен плоскости ![]() в том и только том случае, когда
в том и только том случае, когда ![]() .
.
Итак, с «выуживанием» нормального вектора разобрались, теперь ответим на противоположный вопрос:
 5.2.4. Как составить уравнение плоскости по точке и вектору нормали?
5.2.4. Как составить уравнение плоскости по точке и вектору нормали?
 5.2.2. Как составить уравнение плоскости по трём точкам?
5.2.2. Как составить уравнение плоскости по трём точкам?
| Оглавление |
Автор: Aлeксaндр Eмeлин

Две пересекающиеся плоскости
Пло́скость — одно из фундаментальных понятий в геометрии. При систематическом изложении геометрии понятие плоскости обычно принимается за одно из исходных понятий, которое лишь косвенным образом определяется аксиомами геометрии. В тесной связи с плоскостью принято рассматривать принадлежащие ей точки и прямые; они также, как правило, вводятся как неопределяемые понятия, свойства которых задаются аксиоматически[1].
Некоторые характеристические свойства плоскости[править | править код]
- Плоскость — поверхность, содержащая полностью каждую прямую, соединяющую любые её точки;
- Две различные плоскости либо являются параллельными, либо пересекаются по прямой.
- Прямая либо параллельна плоскости, либо пересекает её в одной точке, либо содержится в плоскости.
- Две прямые, перпендикулярные одной и той же плоскости, параллельны друг другу.
- Две плоскости, перпендикулярные одной и той же прямой, параллельны друг другу.
Плоскость и два её нормальных вектора: n1 и n2
Уравнения плоскости[править | править код]
Впервые встречается у А. К. Клеро (1731).
Уравнение плоскости в отрезках, по-видимому, впервые встречается у Г. Ламе (1816—1818).
Нормальное уравнение ввёл Л. О. Гессе (1861).
Плоскость — алгебраическая поверхность первого порядка: в декартовой системе координат плоскость может быть задана уравнением первой степени.
- Общее уравнение (полное) плоскости

где  и
и  — постоянные, причём
— постоянные, причём  и
и  одновременно не равны нулю; в векторной форме:
одновременно не равны нулю; в векторной форме:

где  — радиус-вектор точки
— радиус-вектор точки  , вектор
, вектор  перпендикулярен к плоскости (нормальный вектор). Направляющие косинусы вектора
перпендикулярен к плоскости (нормальный вектор). Направляющие косинусы вектора  :
:



Если один из коэффициентов в уравнении плоскости равен нулю, уравнение называется неполным. При  плоскость проходит через начало координат, при
плоскость проходит через начало координат, при  (или
(или  ,
,  ) плоскость параллельна оси
) плоскость параллельна оси  (соответственно
(соответственно  или
или  ). При
). При  (
( , или
, или  ) плоскость параллельна плоскости
) плоскость параллельна плоскости  (соответственно
(соответственно  или
или  ).
).
- Уравнение плоскости в отрезках:

где  ,
,  ,
,  — отрезки, отсекаемые плоскостью на осях
— отрезки, отсекаемые плоскостью на осях  и .
и .

в векторной форме:

- Уравнение плоскости, проходящей через три заданные точки
 , не лежащие на одной прямой:
, не лежащие на одной прямой:


(смешанное произведение векторов), иначе

- Нормальное (нормированное) уравнение плоскости

в векторной форме:

где  – единичный вектор,
– единичный вектор,  — расстояние П. от начала координат. Уравнение (2) может быть получено из уравнения (1) умножением на нормирующий множитель
— расстояние П. от начала координат. Уравнение (2) может быть получено из уравнения (1) умножением на нормирующий множитель

(знаки  и противоположны).
и противоположны).
Определение по точке и вектору нормали[править | править код]
В трёхмерном пространстве одним из важнейших способов определения плоскости является указание точки на плоскости и вектора нормали к ней.
Допустим,  является радиусом-вектором точки
является радиусом-вектором точки  , заданной на плоскости, и допустим, что n — это ненулевой вектор, перпендикулярный к плоскости (нормаль). Идея состоит в том, что точка
, заданной на плоскости, и допустим, что n — это ненулевой вектор, перпендикулярный к плоскости (нормаль). Идея состоит в том, что точка  с радиусом-вектором r находится на плоскости тогда и только тогда, когда вектор, проведённый от к , перпендикулярен n.
с радиусом-вектором r находится на плоскости тогда и только тогда, когда вектор, проведённый от к , перпендикулярен n.
Вернёмся к тому, что два вектора являются перпендикулярными тогда и только тогда, когда их скалярное произведение равно нулю. Отсюда следует, что нужная нам плоскость может быть выражена как множество всех точек r таких, что:
- (Здесь точка означает скалярное произведение, а не умножение.)

Развернув выражение, мы получим:

что является знакомым нам уравнением плоскости.
Например:
Дано: точка на плоскости  и вектор нормали
и вектор нормали  .
.
Уравнение плоскости записывается так:



Расстояние от точки до плоскости[править | править код]
Расстояние от точки до плоскости — это наименьшее из расстояний между этой точкой и точками плоскости. Известно, что расстояние от точки до плоскости равно длине перпендикуляра, опущенного из этой точки на плоскость.

-
- ,если и начало координат лежат по разные стороны плоскости, в противоположном случае . Расстояние от точки до плоскости равно





Расстояние между параллельными плоскостями[править | править код]

![d={frac {mid [{bar r}_{2}-{bar r}_{1},{bar n}]mid }{mid {bar n}mid }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3cf3b79c1fa73b510197080a2db0d744b6d48080)

Типы взаимного расположения трёх или менее плоскостей. В частности, 4 тип — пересечение двух плоскостей, 11 тип — плоскость E3 проходит через линию пересечения плоскостей E1 и E2, 12 тип — пересечение трёх плоскостей в точке
Связанные понятия[править | править код]
- Угол между двумя плоскостями. Если уравнения П. заданы в виде (1), то

Если в векторной форме, то

- Плоскости параллельны, если
- или (Векторное произведение)

![[{mathbf {N_{1}}},{mathbf {N_{2}}}]=0.](https://wikimedia.org/api/rest_v1/media/math/render/svg/36c4d8baa08e5ef8fcbb9a88761b1d6a6232517f)
- Плоскости перпендикулярны, если
- или . (Скалярное произведение)


- Пучок плоскостей — все плоскости, проходящие через линию пересечения двух плоскостей. Уравнение пучка плоскостей, то есть любой плоскости, проходящей через линию пересечения двух плоскостей, имеет вид[2]:222:

- где и — любые числа, не равные одновременно нулю. Уравнение самой этой линии можно найти из уравнения пучка, подставляя α=1, β=0 и α=0, β=1.

- Связка плоскостей — все плоскости, проходящие через точку пересечения трёх плоскостей[2]:224. Уравнение связки плоскостей, то есть любой плоскости, проходящей через точку пересечения трёх плоскостей, имеет вид:

- где , и — любые числа, не равные одновременно нулю. Саму эту точку можно найти из уравнения связки, подставляя α=1, β=0, γ=0; α=0, β=1, γ=0 и α=0, β=0, γ=1 и решая получившуюся систему уравнений.

Вариации и обобщения[править | править код]
Плоскости в неевклидовом пространстве[править | править код]
Метрика плоскости не обязана быть евклидовой. В зависимости от введенных отношений инцидентности точек и прямых, различают проективные, аффинные, гиперболические и эллиптические плоскости[1].
Многомерные плоскости[править | править код]
Пусть дано n-мерное аффинное-конечномерное пространство  , над полем действительных чисел. В нём выбрана прямоугольная система координат
, над полем действительных чисел. В нём выбрана прямоугольная система координат  . m-плоскостью называется множество точек
. m-плоскостью называется множество точек  , радиус векторы которых удовлетворяют следующему соотношению
, радиус векторы которых удовлетворяют следующему соотношению 
 — матрица, столбцы которой образует направляющие подпространство плоскости,
— матрица, столбцы которой образует направляющие подпространство плоскости,  — вектор переменных,
— вектор переменных,  — радиус-вектор одной из точек плоскости.
— радиус-вектор одной из точек плоскости.
Указанное соотношение можно из матрично-векторного вида перевести в векторный:
 — векторное уравнение m-плоскости.
— векторное уравнение m-плоскости.
Вектора  образуют направляющее подпространство. Две m-плоскости
образуют направляющее подпространство. Две m-плоскости  называются параллельными, если их направляющие пространства совпадают и
называются параллельными, если их направляющие пространства совпадают и  .
.
(n-1)-плоскость в n-мерном пространстве называется гиперплоскостью или просто плоскостью. Для гиперплоскости существует общее уравнение плоскости. Пусть  — нормальный вектор плоскости,
— нормальный вектор плоскости,  — вектор переменных,
— вектор переменных,  — радиус вектор точки, принадлежащей плоскости, тогда:
— радиус вектор точки, принадлежащей плоскости, тогда:
 — общее уравнение плоскости.
— общее уравнение плоскости.
Имея матрицу направляющих векторов, уравнение можно записать так:  , или:
, или:
 .
.
Углом между плоскостями называется наименьший угол между их нормальными векторами.
Примером 1-плоскости в трёхмерном пространстве (n=3) служит прямая. Её векторное уравнение имеет вид:  . В случае n = 2 прямая является гиперплоскостью.
. В случае n = 2 прямая является гиперплоскостью.
Гиперплоскость в трёхмерном пространстве соответствует привычному понятию плоскости.
См. также[править | править код]
- Сагиттальная плоскость
- Полуплоскость
- Пространство
Примечания[править | править код]
- ↑ 1 2 Математическая энциклопедия, 1984.
- ↑ 1 2 Гусятников П.Б., Резниченко С.В. Векторная алгебра в примерах и задачах. — М.: Высшая школа, 1985. — 232 с.
Литература[править | править код]
- Ильин В. А., Позняк Э. Г. Аналитическая геометрия. — М.: Физматлит, 2002. — 240 с.
- Плоскость // Математическая энциклопедия (в 5 томах). — М.: Советская Энциклопедия, 1984. — Т. 4. — С. 318—319.
Ссылки[править | править код]
 На Викискладе есть медиафайлы по теме Плоскость
На Викискладе есть медиафайлы по теме Плоскость
Метод координат — весьма эффективный и универсальный способ нахождения любых углов или расстояний между стереометрическими объектами в пространстве. Если Ваш репетитор по математике имеет высокую квалификацию, то он должен это знать. В противном случае я бы советовал для «С» части сменить репетитора. Моя подготовка к ЕГЭ по математике С1-С6 обычно включает разбор основных алгоритмов и формул, описанных ниже.
Угол между прямыми а и b

Углом между прямыми в пространстве называется угол между любыми параллельными им пересекающимися прямыми. Этот угол равен углу между направляющими векторами данных прямых (или дополняет его до 180 град).
Какой алгоритм использует репетитор по математике для поиска угла?
1) Выбираем любые вектора  и
и  , имеющие направления прямых а и b (параллельные им).
, имеющие направления прямых а и b (параллельные им).
2) Определяем координаты векторов ") и
и ") по соответствующим координатам их начал и концов (от координат конца вектора нужно отнять координаты начала).
по соответствующим координатам их начал и концов (от координат конца вектора нужно отнять координаты начала).
3) Подставляем найденный координаты в формулу:
 =left vert Cos(widehat{ overrightarrow{AB},overrightarrow{CD}}) right vert =left vert dfrac{x_1x_2+y_1y_2}{sqrt{x_1^2+y_1^2} cdot sqrt{x_2^2+y_2^2}} right vert") . Для нахождения самого угла, нужно найти арккосинус полученного результата.
. Для нахождения самого угла, нужно найти арккосинус полученного результата.
Нормаль к плоскости
Нормалью  к плоскости называется любой вектор, перпендикулярный к этой плоскости.
к плоскости называется любой вектор, перпендикулярный к этой плоскости.
Как найти нормаль? Для поиска координат нормали достаточно узнать координаты любых трех точек M, N и K, лежащих в данной плоскости. По этим координатам находим координаты векторов  и
и  и требуем выполнения условий
и требуем выполнения условий  и
и  . Приравнивая скалярные произведение векторов к нулю, составляем систему уравнений с тремя переменными, из которой можно найти координаты нормали.
. Приравнивая скалярные произведение векторов к нулю, составляем систему уравнений с тремя переменными, из которой можно найти координаты нормали.
Замечание репетитора по математике: Совсем не обязательно решать систему полностью, ибо достаточно подобрать хотя бы одну нормаль. Для этого можно подставить вместо какой-нибудь из ее неизвестных координат любое число (например единицу) и решить систему двух уравнений с оставшимися двумя неизвестными. Если она решений не имеет, то это значит, что в семействе нормалей нет той, у которой по выбранной переменной стоит единица. Тогда подставьте единицу вместо другой переменной (другой координаты) и решите новую систему. Если опять промахнетесь, то Ваша нормаль будет иметь единицу по последней координате, а сама она окажется параллельной какой-нибудь координатной плоскости (в таком случае ее легко найти и без системы).
Угол между прямой и плоскостью
 Допустим, что нам заданы прямая и плоскость координатами направляющего вектора и нормали
Допустим, что нам заданы прямая и плоскость координатами направляющего вектора и нормали ")
Угол  между прямой и плоскость вычисляется по следующей формуле:
между прямой и плоскость вычисляется по следующей формуле:
 right vert = left vert dfrac{x_1x_2+y_1y_2}{sqrt{x_1^2+y_1^2} cdot sqrt{x_2^2+y_2^2}} right vert")
Угол между плоскостями
Пусть ") и — две любые нормали к данным плоскостям.
и — две любые нормали к данным плоскостям.  Тогда косинус угла
Тогда косинус угла  между плоскостями равен модулю косинуса угла между нормалями:
между плоскостями равен модулю косинуса угла между нормалями:
 right vert =left vert dfrac{x_1x_2+y_1y_2}{sqrt{x_1^2+y_1^2} cdot sqrt{x_2^2+y_2^2}} right vert")
Уравнение плоскости в пространстве
 Точки, удовлетворяющие равенству
Точки, удовлетворяющие равенству  образуют плоскость с нормалью
образуют плоскость с нормалью ") . Коэффициент
. Коэффициент  отвечает за величину отклонения (параллельного сдвига) между двумя плоскостями с одной и той же заданной нормалью . Для того, чтобы написать уравнение плоскости нужно сначала найти ее нормаль (как это описано выше), а затем подставить координаты любой точки плоскости вместе с координатами найденной нормали в уравнение и найти коэффициент .
отвечает за величину отклонения (параллельного сдвига) между двумя плоскостями с одной и той же заданной нормалью . Для того, чтобы написать уравнение плоскости нужно сначала найти ее нормаль (как это описано выше), а затем подставить координаты любой точки плоскости вместе с координатами найденной нормали в уравнение и найти коэффициент .
Расстояние от точки до плоскости

Для вычисления расстояния ") от точки
от точки ") до плоскости
до плоскости  , заданной уравнением можно использовать следующую формулу:
, заданной уравнением можно использовать следующую формулу:
=dfrac{|A cdot x_0 + B cdot y_0 + C cdot z_0 + D|}{sqrt{A^2+B^2+C^2}}")
В знаменателе стоит длина нормали, а числителе — значение выражения из левой части уравнения плоскости в точке ")
Комментарий репетитора по математике:
Методом координат можно находить не только углы и расстояния в пространстве, но и
1) площади многоугольников (треугольника, параллелограмма), расположенных в заданной плоскости.
2) объемы простейших многогранников (параллелепипедов и пирамид).
Для понимания таких формул нужно изучить понятия векторного и смешанного произведения векторов, а также определителя матрицы. В скором времени я сделаю для вычисления объемов соответствующую справочную страничку.
Средства аналитической геометрии репетитор по математике практически не использует в работе со средним и тем более слабым учеником. И очень жаль, что загруженность среднестатистического сильного школьника не позволяет репетитору провести более-менее серьезную работу на уровне определений из высшей математики и с соответствующей практикой решения задач. Поэтому я часто ограничиваюсь простым сообщением формул и демонстрацией одного – двух примеров их использования. В школьной программе не предусмотрено время для изучения векторных приемов вообще, однако на ЕГЭ Вы имеете право решать задачу С2 любым из известных науке способов. Отсюда мораль: учите координаты. Расширенная подготовка к ЕГЭ по математике с изучением приемов аналитической геометрии даст Вам мощное и универсальное средство для решения огромного класса задач типа С2. Пользуйтесь этой страничкой на здоровье!
Колпаков А.Н. Репетитор по математике Москва (Строгино).
