Решение задачи (РГР) К1 «Определение скорости и ускорения точки по заданным уравнениям ее движения» по разделу «кинематика» теоретической механики.
Пример определения для заданного момента времени положения точки на траектории, скорости, полного, касательного и нормального ускорения, радиуса кривизны траектории и вида траектории движения точки, если движение точки задано уравнениями.
Задача
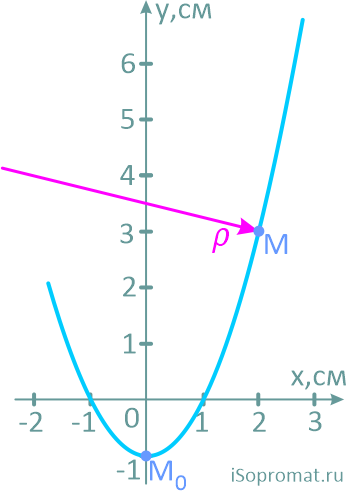
Движение точки M задано уравнениями:
Требуется:
Установить вид траектории движения точки M, и для момента времени t = t1 = 0,5 с найти:
- положение точки на траектории,
- скорость, полное, касательное и нормальное ускорения,
- радиус кривизны траектории.
Другие примеры решений >
Помощь с решением задач >
Решение
Расчет траектории движения точки
Уравнения движения можно рассматривать как параметрические уравнения траектории точки.
Другие видео
Чтобы узнать вид траектории в координатной форме, надо получить прямую зависимость между переменными x и y, для этого избавимся от параметра времени t, выразив его, например, из первого уравнения и подставив во второе.
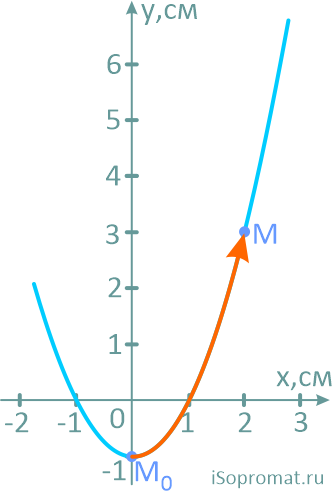
Получилось квадратное уравнение. То есть точка движется по параболе.
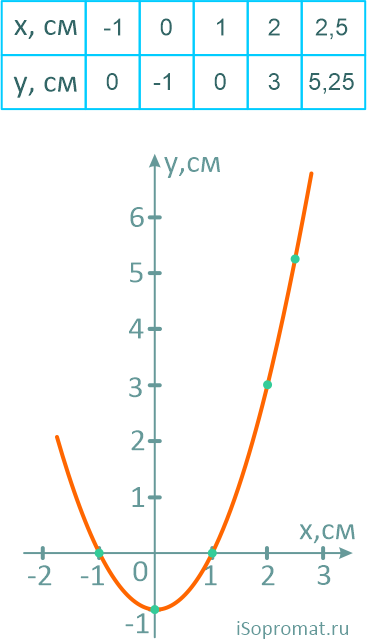
Построим траекторию движения, рассчитав несколько её точек.
Положение точки на траектории
Определим положения точки в начале движения и в заданный момент времени.
Для этого в исходные уравнения подставляем соответственно сначала 0
а затем, половину секунды.
Положение точки на ее траектории в заданный момент обозначим буквой M, и все остальные параметры будем рассчитывать для неё.
Расчет скорости точки
Направление и величину скорости точки определим как векторную сумму её проекций на оси координат.
![]()
Здесь i, j — орты осей x и y.
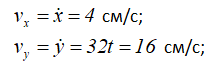
vx, vy — проекции вектора скорости на оси координат.
Проекции вектора скорости получим, взяв первые производные по времени t от соответствующих заданных уравнений движения точки.
Далее выбрав масштаб, из точки M последовательно и с учетом знака, откладываем оба вектора.
Сам вектор скорости получим, соединив точку M с концом второго вектора и направив его по ходу движения точки.
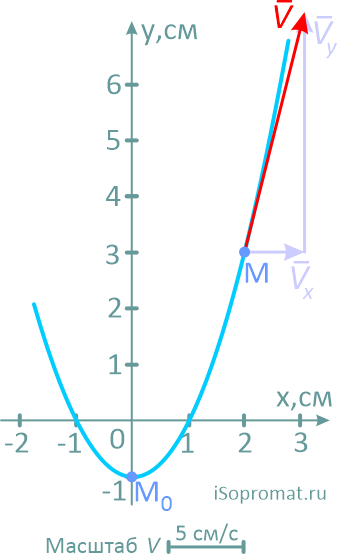
Здесь надо отметить, что вектор скорости всегда должен располагаться по касательной к траектории. Любое другое положение будет указывать на ошибки в расчетах.
Рассчитаем модуль вектора скорости

Расчет ускорений точки
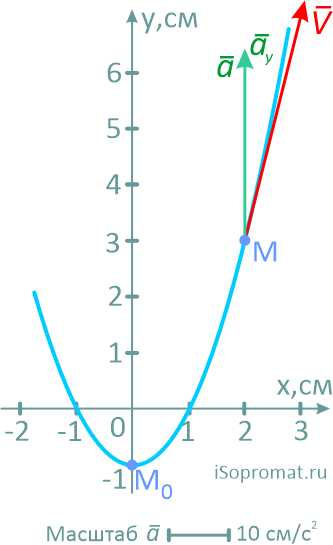
Проекции полного ускорения точки на оси координат определяются как вторая производная от исходных уравнений движения точки.

Здесь, ax, ay – проекции ускорения точки на оси координат.
В этом примере, горизонтальная проекция ускорения оказалась равной нулю, поэтому его модуль и направление будут совпадать с вертикальной.
![]()
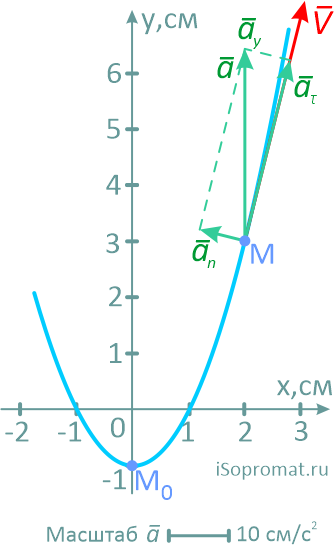
Касательная составляющая полного ускорения это производная скорости точки по времени.

Ее можно рассчитать по этой формуле.

Вектор касательного ускорения всегда направлен по линии вектора скорости.
Положительная величина говорит об ускоренном движении точки и тогда направления скорости и касательного ускорения совпадают.
В противном случае они разнонаправлены, и движение точки замедляется.
Модуль нормального ускорения определим по формуле Пифагора, так как векторы касательного и центростремительного ускорений всегда взаимно перпендикулярны.

Расчет радиуса кривизны траектории
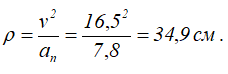
Осталось найти только радиус кривизны траектории в точке M, который равен отношению квадрата скорости к модулю нормального ускорения.
Результаты расчетов
Результаты вычислений для заданного момента времени t1=0,5c приведены в таблице:
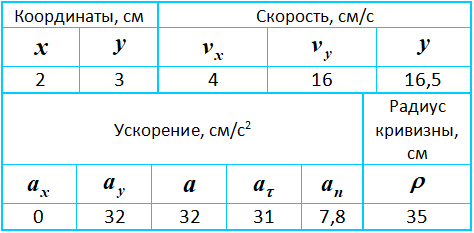
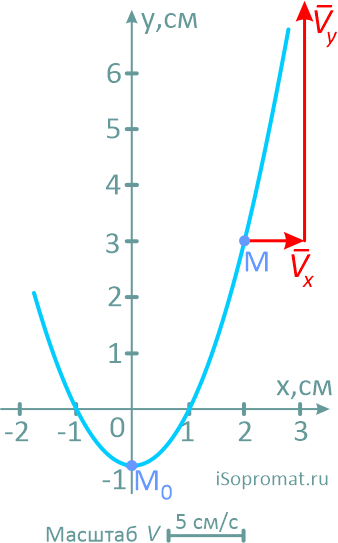
На рисунке показано положение точки M в заданный момент времени и векторы скорости и ускорений в выбранном масштабе.
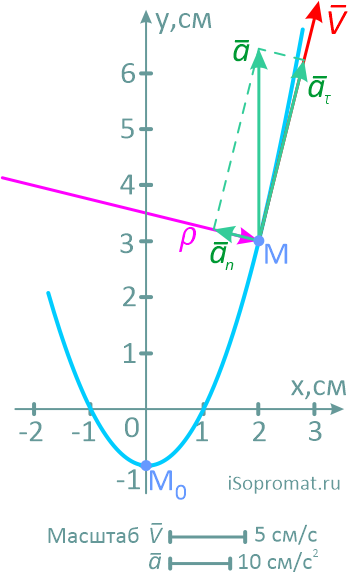
Вектор v строим по составляющим vx и vy, причем этот вектор должен по направлению совпадать с касательной к траектории.
Вектор a строим по составляющим ax и ay и затем раскладываем на составляющие векторы aτ и an. Совпадение величин aτ и an, найденных из чертежа, с их значениями, полученными аналитически, служит критерием правильности решения.
Другие примеры решения задач >
При произвольном
криволинейном движении вектор скорости
может изменяться как по величине, так
и по направлению. В этом случае существует
ускорение, характеризующее быстроту
изменения скорости по величине, и
ускорение, характеризующее быстроту
изменения скорости по направлению.
Рассмотрим три
частных случая.
При движении по
прямолинейной траектории
![]() –
–
орт скорости![]() остается постоянным, т.е.
остается постоянным, т.е.![]() =сonst,
=сonst,
поэтому
![]() .
.
Если![]() 0,
0,
то ускорение направлено так же, как и
скорость. Если
![]() 0,
0,
направление ускорения противоположно
направлению скорости. Модуль ускорения
равен
![]() .
.
При равномерном
движении по окружности =сonst,
изменяется
![]() (рис.1.6,а),
(рис.1.6,а),
поэтому:
![]() .
.
(1.4)
Найдем производную
орта скорости
![]() .
.


![]()
![]()
s
![]() R
R
![]() О
О
![]()
![]()
а)
б)
Рис.1.6
Из рис.1.6 видно,
что за время t
орт скорости поворачивается на угол
![]()
и получает приращение
![]() .
.
По определению
![]() .
.
При
![]() и
и![]() .
.
Тогда![]() ,
,![]() – еди-ничный вектор, имеющий такое же
– еди-ничный вектор, имеющий такое же
направление, как и![]() .
.
При произвольном
переходе единичный вектор
![]() превращается в
превращается в![]() -орт
-орт
нормали к траектории в той точке, в
которой частица была в моментt.
Таким образом,
![]() .
.
(1.5)
Подставив (1.5) в
(1.4), получим
![]() – нормальное уско-рение.
– нормальное уско-рение.
При равномерном
движении по окружности ускорение
направлено по нормали к скорости. Поэтому
называют его нормальным ускорением и
в обозначении ставят индекс n.
При неравномерном
движении частицы по криволинейной
траектории оба множителя в формуле
![]() изменяются со временем. Применив правило
изменяются со временем. Применив правило
дифференцирования произведения функций,
найдем выражение для ускорения
![]() .
.
Видно, что в общем
случае ускорение распадается на два
слагаемых. Одно из них
![]() коллинеарно скорости и, следовательно,
коллинеарно скорости и, следовательно,
направлено по касательной к траектории.
Поэтому его называют тангенциальным
(т.е. касательным) ускорением и обозначают![]() .
.
Второе слагаемое
совпадает с
![]() ,
,
т.е. определяется формулой![]() и является нормальным ускорением. Первое
и является нормальным ускорением. Первое
слагаемое характеризует быстроту
изменения модуля скорости, второе
быстроту изменения направления скорости.
Составляющие![]() и
и![]() перпендикулярны друг другу (рис.1.7).
перпендикулярны друг другу (рис.1.7).
Поэтому квадрат модуля ускорения равен
сумме квадратов модулей составляющих![]() .
.
|
Рис.1.7 |
Отсюда
|

1.4. Движение точки по окружности. Угловая скорость. Угловое ускорение
При вращении
твердого тела все его точки движутся
по окружности, центры которых лежат на
единой прямой, называемой осью вращения.
Окружности, по которым движутся точки
тела, лежат в плоскости, перпендикулярной
к этой оси.
Радиус-вектор
каждой точки – есть вектор, проведенный
из центра окружности в данную точку. Он
поворачивается за время t
на один и тот же угол .
Векторная величина
![]() называется угловой скоростью, гдеt
называется угловой скоростью, гдеt
– время, за
которое совершается поворот на угол
.
Из определения видно, что вращение точки
по окружности описывается угловой
скоростью
![]() .
.
|
Вектор |
М1 Рис.1.8 |

ра угловой скорости.
При равномерном
вращении угловая скорость
![]() ,
,
а угол поворота![]() .
.
Единицей угловой
скорости в системе СИ является радиан
в секунду
![]() .
.
Угловая скорость
– есть величина постоянная, она указывает,
на какой угол поворачивается тело за
единицу времени. В этом случае она
называется круговой или циклической
частотой.
Равномерное
движение можно охарактеризовать также
периодом обращения. Периодом называется
время, за которое тело делает один
оборот, т.е. поворачивается на угол 2.
Поскольку за время, равное Т совершается
угол поворота 2,
то
![]() ;
;
![]() .
.
Число оборотов за
единицу времени (частоту) обозначим
и выразим период и циклическую частоту
через эту величину
![]() ;
;
![]() ;
;![]() .
.
Угол поворота за
время t
можно записать через частоту
и полное
число оборотов
N
![]() ;
;
![]() .
.
При неравномерном
вращении величина
изменяется со временем и за промежуток
времени t
получает приращение .
Величина,
характеризующая изменение вектора
угловой скорости со временем, называется
угловым ускорением
![]() .
.
Таким образом,
изменение угловой скорости по времени
характеризуется угловым ускорением
![]() ,
,
которое определяется как производная
угловой скорости по времени
![]() .
.
Единица измерения
углового ускорения
![]() .
.
При неподвижной оси вращения векторы![]() и
и![]() коллинеарны и направлены вдоль оси
коллинеарны и направлены вдоль оси
вращения. Если угловая скорость
увеличивается![]() ,
,
то векторы![]() и
и![]() одинаково направлены, если угловая
одинаково направлены, если угловая
скорость уменьшается![]() ,
,
то векторы![]() и
и![]() противоположно направлены.
противоположно направлены.
При неравномерном
вращении для угла поворота, угловой
скорости и ускорения справедливо
соотношение
![]() ,
,
где
0
– начальная угловая скорость.
Найдем соотношение
между
![]() (рис.1.9).
(рис.1.9).
|
М1 R s М2 Рис.1.9 |
Пусть за малый
Величина |

Подставляя значение
s
из предыдущего равенства, получим
![]() ,
,
т.е. линейная
скорость точки прямо пропорциональна
радиусу и угловой скорости
![]() .
.
(1.6)
Выясним соотношение
между
![]() и
и![]() .
.
Нормальное ускорение точек прямо
пропорционально квадрату линейной
скорости и обратно пропорционально
радиусу
![]() .
.
(1.7)
Подставляя в
уравнение (1.7) уравнение (1.6), получим
следующее выражение для нормального
ускорения:
![]() .
.
Модуль тангенциального
ускорения равен модулю первой производной
от линейной скорости
![]() .
.
(1.8)
Подставляя (1.6) в
уравнение (1.8) найдем, что
![]() .
.
Но так как
![]() ,
,
то![]() .
.
Для нахождения соотношения между
векторами![]() и
и![]() сделаем чертеж (рис.1.10). Пусть тело
сделаем чертеж (рис.1.10). Пусть тело
вращается вокруг осиz
с угловой скоростью
![]() .
.
Выберем точку О на оси и проведем
радиус-вектор![]() из этой точки к точке С. Из треугольника
из этой точки к точке С. Из треугольника
ОАС видно, что![]() .
.
Умножим обе части равенства на
и получим cледующее выражение:
![]() .
.
Так как
![]() – модуль скорости,
– модуль скорости,![]() – модуль векторного произведения
– модуль векторного произведения![]() ,
,
то
![]() .
.
Откуда следует,
что вектор скорости равен векторному
произведению вектора угловой скорости
![]() на радиус-вектор
на радиус-вектор![]() :
:
![]() .
.
(1.9)
Формуле (1.9) можно
придать иной вид. Для этого представим
|
A C
O Рис.1.10 |
радиус-вектор
Векторы |
 z
z![]() .
.
(1.10)
Выведем соотношение
для тангенциального и углового ускорения.
По определению тангенциальное ускорение
есть первая производная от вектора
скорости по времени (1.8). Подставляя
(1.10) в (1.8), получим
![]() ,
,
т. е.
![]() .
.
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 20 апреля 2021 года; проверки требуют 3 правки.

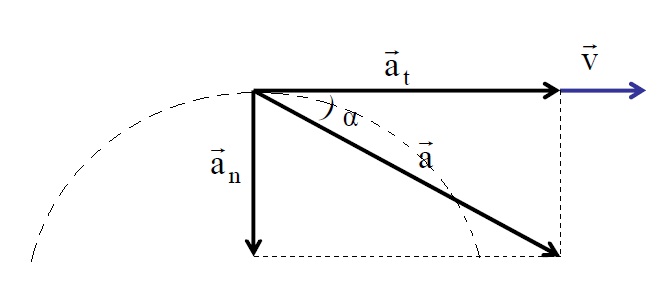
Разложение ускорения  на тангенциальное
на тангенциальное  и нормальное
и нормальное  (
( — единичный вектор нормали)
— единичный вектор нормали)
Центростреми́тельное (норма́льное) ускоре́ние — составляющая ускорения тела, характеризующая быстроту изменения направления вектора скорости (вторая составляющая, тангенциальное ускорение, характеризует изменение модуля скорости). Направлено к центру кривизны траектории, с чем и связан термин.
Обозначается символом, выбранным для ускорения, с добавлением значка «нормальное»:  (реже
(реже  ); в системе СИ измеряется в м/с2.
); в системе СИ измеряется в м/с2.
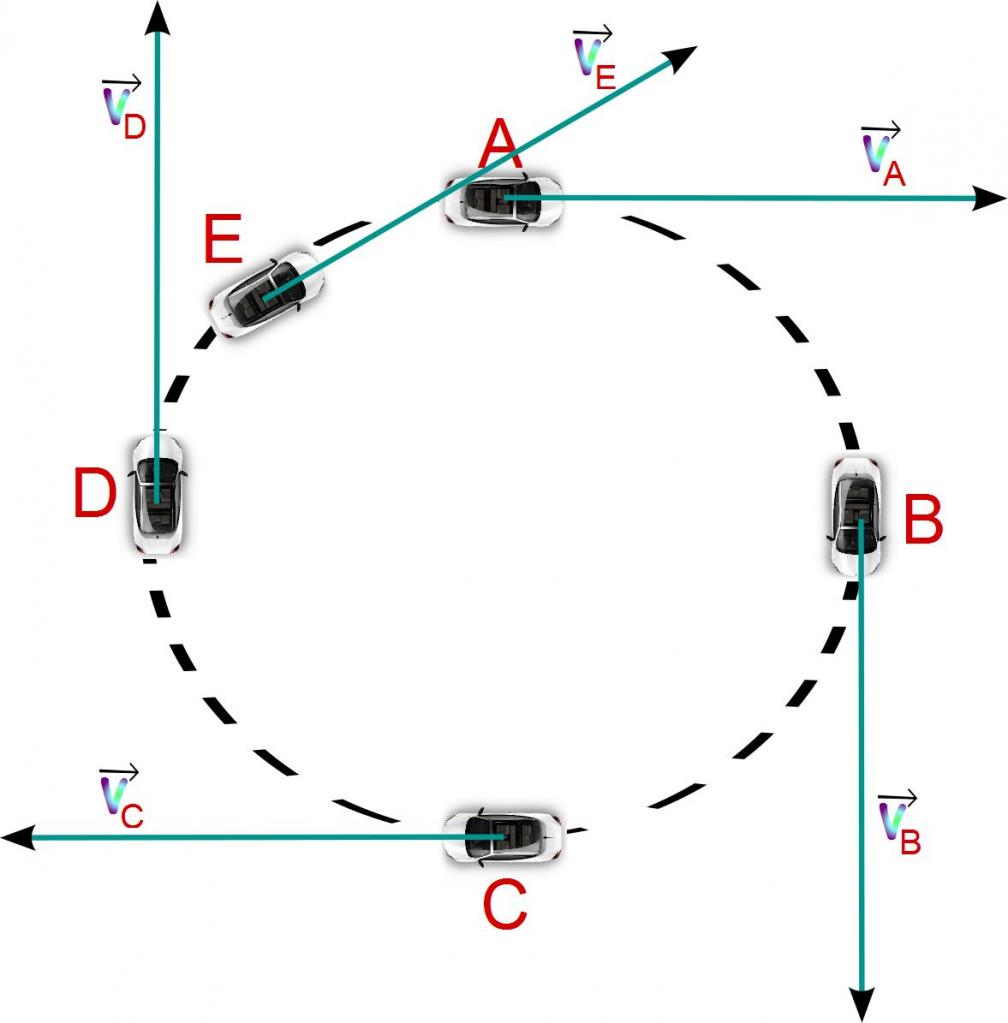
Пример движения с ненулевым центростремительным ускорением — движение по окружности (в таком случае направлено к центру окружности).
В классической механике нормальное ускорение вызывается компонентами сил, направленными ортогонально вектору скорости. Например, движение космического объекта на орбите характеризуется центростремительным ускорением, вызванным гравитацией. Составляющая суммы сил, обусловливающая наличие нормального ускорения, называется центростремительной силой. Связанное понятие для неинерциальных систем отсчёта — центробежная сила.
Осестремительное ускорение, рассматриваемое в случаях вращения тела вокруг оси, в проекции на плоскость, перпендикулярную оси, предстаёт как центростремительное.
Общая формула[править | править код]
Нормальное ускорение  вычисляется по формуле
вычисляется по формуле

или (с использованием соотношения  )
)
 ,
,

где  — (мгновенная) линейная скорость движения по траектории,
— (мгновенная) линейная скорость движения по траектории,  — (мгновенная) угловая скорость движения относительно центра кривизны траектории,
— (мгновенная) угловая скорость движения относительно центра кривизны траектории,  — радиус кривизны траектории в данной точке.
— радиус кривизны траектории в данной точке.
Выражения могут быть переписаны в векторном виде:
- .

Здесь — единичный вектор, направленный от данной точки траектории к центру кривизны траектории.
Эти формулы применимы как к частной ситуации равномерного движения ( const), так и к произвольному случаю. В равномерном случае нормальное ускорение совпадает с полным. В общем же случае нормальное ускорение — это лишь компонента вектора
const), так и к произвольному случаю. В равномерном случае нормальное ускорение совпадает с полным. В общем же случае нормальное ускорение — это лишь компонента вектора  , перпендикулярная траектории движения (вектору
, перпендикулярная траектории движения (вектору  ), а в полный вектор ускорения входит ещё и тангенциальная составляющая
), а в полный вектор ускорения входит ещё и тангенциальная составляющая  , сонаправленная касательной к траектории движения[1].
, сонаправленная касательной к траектории движения[1].
Вывод формулы[править | править код]
Для разложения ускорения на тангенциальное и нормальное можно продифференцировать по времени вектор скорости, представленный в виде  через единичный вектор касательной
через единичный вектор касательной  :
:
- .

Здесь первое слагаемое — тангенциальное ускорение, а второе — нормальное ускорение. Через обозначен единичный вектор нормали, — радиус кривизны траектории в рассматриваемой точке,  — элемент длины траектории. Малый участок любой кривой может считаться дугой окружности, причём её радиус и есть радиус кривизны . В цепочке преобразований использованы очевидные соотношения
— элемент длины траектории. Малый участок любой кривой может считаться дугой окружности, причём её радиус и есть радиус кривизны . В цепочке преобразований использованы очевидные соотношения  и
и  (где
(где  — малый угол поворота вокруг центра кривизны).
— малый угол поворота вокруг центра кривизны).
Равенство  вытекает из геометрических соображений. Разность
вытекает из геометрических соображений. Разность  единичных касательных векторов в рассматриваемой () и близкой к ней (
единичных касательных векторов в рассматриваемой () и близкой к ней ( ) точках траектории составляет по величине
) точках траектории составляет по величине  , где
, где  — угол между и . Эта разность направлена под углом
— угол между и . Эта разность направлена под углом  к нормали в рассматриваемой точке. При малости будет совпадение с вектором нормали . Также при малости возможно разложении синуса в ряд Тейлора. В результате придём к
к нормали в рассматриваемой точке. При малости будет совпадение с вектором нормали . Также при малости возможно разложении синуса в ряд Тейлора. В результате придём к  или, для бесконечно малых,
или, для бесконечно малых,  .
.
О радиусе кривизны[править | править код]
Вычисление радиуса кривизны и координат центра кривизны траектории является математической задачей (см. Кривизна). Если кривая задана уравнением  , то радиус её кривизны в точке (
, то радиус её кривизны в точке ( ,
,  ) находится как[2]
) находится как[2]
- ,

а положение центра кривизны — по формулам[2]
- .

Единичный вектор нормали в таком случае составит ( ,
,  — орты)
— орты)
- .

Если известна зависимость радиус-вектора материальной точки от времени  (с математической точки зрения это означает задание траектории в параметрическом виде), то радиус кривизны можно найти через ускорение:
(с математической точки зрения это означает задание траектории в параметрическом виде), то радиус кривизны можно найти через ускорение:
- ,

где  и ; предварительно находится скорость как
и ; предварительно находится скорость как  . Центр кривизны в общем случае не будет совпадать с началом отсчёта радиус-вектора.
. Центр кривизны в общем случае не будет совпадать с началом отсчёта радиус-вектора.
Мотивация, замечания[править | править код]
То, что разложение вектора ускорения на компоненты — одну вдоль касательной к траектории (тангенциальное ускорение) и другую ортогональную ей (нормальное ускорение) — может быть удобным и полезным, довольно очевидно само по себе. При движении с постоянной по модулю скоростью тангенциальная составляющая становится равной нулю, то есть в этом важном частном случае остается только нормальная составляющая. Кроме того, каждая из этих составляющих имеет ярко выраженные собственные свойства и структуру, и нормальное ускорение содержит в структуре своей формулы достаточно важное и нетривиальное геометрическое наполнение. Крайне важен также частный случай движения по окружности.
Абсолютная величина тангенциального ускорения зависит только от путевого ускорения, совпадая с его абсолютной величиной, в отличие от абсолютной величины нормального ускорения, которая от путевого ускорения не зависит, зато зависит от путевой скорости.
История понятия[править | править код]
Первым правильные формулы для центростремительного ускорения (или центробежной силы) получил, по-видимому, Гюйгенс. Практически с этого времени рассмотрение центростремительного ускорения входит в обычную технику решения механических задач.
Несколько позже эти формулы сыграли существенную роль в открытии закона всемирного тяготения (формула центростремительного ускорения использовалась для получения закона зависимости гравитационной силы от расстояния до источника гравитации, исходя из выведенного из наблюдений третьего закона Кеплера).
К XIX веку рассмотрение центростремительного ускорения становится уже совершенно рутинным как для чистой науки, так и для инженерных приложений.
См. также[править | править код]
- Тангенциальное ускорение
- Кривизна кривой
- Центробежная сила
Примечания[править | править код]
- ↑ Как видно из формулы, при движении с постоянной путевой скоростью — тангенциальное ускорение попросту равно нулю.
- ↑ 1 2 Шнейдер В. Е. и др. Краткий курс высшей математики. Учеб. пособие для втузов. М., «Высш. школа», c. 368-370.
Как найти нормальное ускорение зная тангенциальное
Содержание
- Этот видеоурок доступен по абонементу
- На этом уроке мы вспомним, что такое ускорение. Рассмотрим две его составляющие, тангенциальную и нормальную, и пример нахождения этих составляющих. А также решим две задачи из сборника для подготовки к Единому государственному экзамену на нахождение радиуса траектории в наивысшей точке.
- Ускорение. Нормальная и тангенциальная составляющие ускорения
- Пример нахождения тангенциальной и нормальной составляющей ускорения
- Задача 1
- Задача 2
- Нахождение закона изменения скорости от времени
- В физике
- Траектория движения и компоненты полного ускорения
- Ускорение тангенциальное
- Ускорение нормальное
- Ускорение полное, нормальное и тангенциальное
- Решение задачи
Тангенциальным (касательным) ускорением называют ту составляющую вектора ускорения, которая направлена по касательной к траектории в данной точке траектории движения. Тангенциальное ускорение описывает степень изменения скорости по модулю при совершении криволинейного движения.
Если тело движется по криволинейной траектории, то его скорость направлена по касательной к этой траектории.
Так как направление скорости все время меняется, значит, в таком случае криволинейное движение всегда происходит с ускорением, также, если модуль скорости не меняется.
В большинстве случаев ускорение направлено под некоторым углом к скорости. Составляющую ускорения, которая направлена вдоль скорости, называют тангенциальным ускорением  . Тангенциальное ускорение описывает степень изменения скорости по модулю:
. Тангенциальное ускорение описывает степень изменения скорости по модулю:

Нормальное ускорение  – это составляющая ускорения, которая направлена к центру кривизны траектории, то есть она является нормалью (направлена перпендикулярно) к скорости. Нормальное ускорение описывает степень изменения скорости по направлению:
– это составляющая ускорения, которая направлена к центру кривизны траектории, то есть она является нормалью (направлена перпендикулярно) к скорости. Нормальное ускорение описывает степень изменения скорости по направлению:

Здесь R – это радиус кривизны траектории в заданной точке.
Тангенциальное и нормальное ускорение всегда имеют перпендикулярное направление, откуда получаем модуль полного ускорения:
 .
.
Этот видеоурок доступен по абонементу
У вас уже есть абонемент? Войти
 На этом уроке мы вспомним, что такое ускорение. Рассмотрим две его составляющие, тангенциальную и нормальную, и пример нахождения этих составляющих. А также решим две задачи из сборника для подготовки к Единому государственному экзамену на нахождение радиуса траектории в наивысшей точке.
На этом уроке мы вспомним, что такое ускорение. Рассмотрим две его составляющие, тангенциальную и нормальную, и пример нахождения этих составляющих. А также решим две задачи из сборника для подготовки к Единому государственному экзамену на нахождение радиуса траектории в наивысшей точке.
Ускорение. Нормальная и тангенциальная составляющие ускорения
Механическое движение по характеру подразделяется на поступательное, вращательное и колебательное; по виду траектории – прямолинейное и криволинейное. Также механическое движение можно подразделять по характеру изменения скорости.
Физическая величина, которая определяет быстроту изменения скорости, называется ускорением. Математически ускорение определяется отношением изменения скорости к промежутку времени, за которое оно произошло (производная от скорости по времени):  и нормальную (перпендикулярную вектору скорости).</p>
<p style=)
.</p>
<p style=)

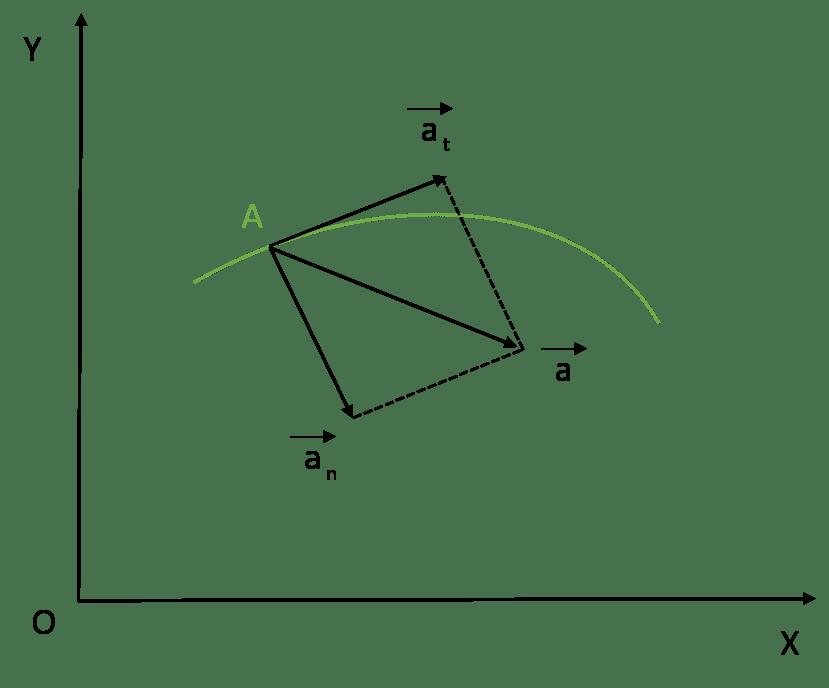
Рис. 1. Тангенциальная и нормальная составляющие полного ускорения
Тангенциальная составляющая ускорения характеризует быстроту изменения величины (модуля) скорости. Тангенциальное ускорение всегда коллинеарно скорости.
1) Если тангенциальная составляющая ускорения сонаправлена со скоростью, то движение будет ускоренное (см. рис. 2).


Рис. 2. Тангенциальная составляющая ускорения сонаправлена со скоростью
2) Если тангенциальная составляющая ускорения противонаправлена скорости, то движение будет замедленным (см. рис. 3).


Рис. 3. Тангенциальная составляющая ускорения противонаправлена скорости
Нормальная составляющая ускорения характеризует быстроту изменения скорости по направлению. Нормальное ускорение всегда перпендикулярно скорости и направлено к центру по радиусу траектории, по которой движется тело (см. рис. 4).


Рис. 4. Направление нормального ускорения
Величина нормального ускорения связана с радиусом траектории и со скоростью движения следующим соотношением: 
При прямолинейном движении тело имеет только тангенциальное ускорение. Нормальное ускорение отсутствует, так как скорость тела по направлению остаётся неизменной (см. рис. 5).

Рис. 5. Прямолинейное движение
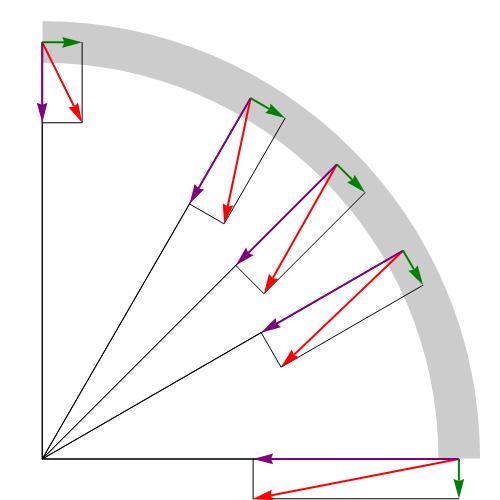
При криволинейном движении, как правило, тело имеет тангенциальную и нормальную составляющую ускорения (см. рис. 6).

Рис. 6. Криволинейное движение
Пример нахождения тангенциальной и нормальной составляющей ускорения
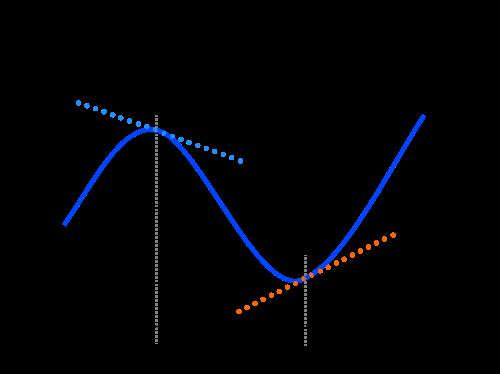
Рассмотрим движение тела, брошенного под углом к горизонту (см. рис. 7). Найдём составляющие ускорения в тот момент, когда скорость тела направлена под углом  к горизонту.
к горизонту.

Рис. 7. Траектория движения тела
Касательная к траектории в точке A – это направление скорости 

Рис. 8. Проекции ускорения
На рисунке видно, что тангенциальная составляющая ускорения направлена против скорости, то есть скорость тела в данный момент уменьшается (см. рис. 8). Нормальная составляющая ускорения направлена перпендикулярно скорости, следовательно, скорость в следующий момент наклонится в сторону  .
.
Величины составляющих ускорения находим геометрически.

Рис. 9. Геометрическое определение величины составляющих ускорения
Угол A в треугольнике разложения на составляющие (треугольник выделен жёлтым на рисунке) имеет взаимно перпендикулярные стороны с углом  Следовательно, тангенциальная составляющая равна:
Следовательно, тангенциальная составляющая равна:  .
.
Нормальная составляющая ускорения равна:  .
.
Задача 1
Обод радиусом 1 метр катится по горизонтальной поверхности со скоростью 10 м/с. Найти радиус траектории точки поверхности обода при прохождении наивысшего положения.
Дано:  Найти:
Найти:  .
.
Решение

Рис. 10. Иллюстрация к задаче
На рисунке изображён обод, который катится по горизонтальной поверхности со скоростью Скорость точки A относительно горизонтальной поверхности при движении обода без проскальзывания равна нулю. Это объясняется тем, что она движется вместе с ободом по горизонтали со скоростью Скорости точек в верхней части обода равны:  . Эта скорость будет направлена по горизонтали в сторону движения обода.
. Эта скорость будет направлена по горизонтали в сторону движения обода.
С центром обода у всех точек, лежащих на её поверхности, связано нормальное ускорение, так как оно направлено перпендикулярно скорости движения точки по окружности в любой момент времени.
Ускорение остаётся неизменным для всех точек поверхности обода, так как при переходе к системе отсчёта, связанной с Землёй, центр обода движется равномерно:  .
.
Тогда для точки 



В этой задаче заданное значение начальной скорости было лишним. Избыточные данные часто включают в задания ЕГЭ по физике.
Ответ:  .
.
Задача 2
После удара футбольный мяч за 2 с пролетел 40 м и упал на землю. Чему равен радиус траектории мяча в верхней точке траектории?
Дано: Найти:  .
.
Решение

Рис. 11. Иллюстрация к задаче
На рисунке изображена траектория полёта мяча (см. рис. 11). Точка A – верхняя точка траектории, скорость мяча в которой Скорость в точке A – это горизонтальная составляющая скорости, которая в процессе всего движения остаётся неизменной. Поэтому скорость в точке A равна отношению всего пути, пройденного по горизонтали, ко времени:  .
.
Следовательно, радиус траектории в верхней точке равен:  .
.
Ответ:  .
.
Нахождение закона изменения скорости от времени
Сведения об ускорении необходимы для того, чтобы найти закон изменения скорости от времени. Например, зависимость скорости от времени находится как неопределённый интеграл от ускорения по времени:  , где C – постоянная интегрирования.
, где C – постоянная интегрирования.
При равноускоренном движении При 
- Вопросы в конце параграфа 13 (стр. 46); — Касьянов В.А. Физика. 10 кл. (см. список рекомендованной литературы) (Источник)
- Камень брошен со скоростью 20 м/c под углом Если вы нашли ошибку или неработающую ссылку, пожалуйста, сообщите нам – сделайте свой вклад в развитие проекта.
В кинематике для однозначного определения характеристик движения тела в любой точке траектории необходимо знать его скорость и ускорение. Зависимость от времени этих величин предоставляет всю необходимую информацию для вычисления пройденного телом пути. Рассмотрим подробнее в статье, что такое ускорение тангенциальное и нормальное ускорение.
В физике
Прежде чем рассматривать для механического движения ускорение нормальное и тангенциальное ускорение, познакомимся с самим физическим понятием. Определение ускорения является достаточно простым. В физике под ним понимают характеристику изменения скорости. Последняя является векторной величиной, определяющей быстроту изменения координат движущегося объекта в пространстве. Скорость измеряется в метрах в секунду (расстояние, пройденное за единицу времени). Если ее обозначить символом v¯, тогда математическое определение ускорения a¯ будет выглядеть так:
Это равенство определяет так называемое полное мгновенное ускорение. Мгновенным оно называется потому, что характеризует изменение скорости лишь в данный момент времени.
Если движение является равноускоренным, то есть в течение длительного времени ускорение не меняет своего модуля и направления, тогда можно записать следующую формулу для его определения:
Где Δt>>dt. Величина a¯ здесь называется средним ускорением, которое в общем случае отличается от мгновенного.
Ускорение измеряется в системе СИ в метрах в квадратную секунду (м/с 2 ).
Траектория движения и компоненты полного ускорения
Чаще всего тела в природе движутся по кривым траекториям. Примерами такого перемещения являются: вращение по своим орбитам планет, параболическое падение камня на землю, поворот автомобиля. В случае криволинейной траектории в любой момент времени скорость направлена по касательной к рассматриваемой точке траектории. Как при этом направлено ускорение?
Чтобы ответить на поставленный выше вопрос, запишем скорость тела в следующей форме:
Здесь ut¯ — вектор скорости единичный, индекс t означает, что он направлен по касательной к траектории (тангенциальная компонента). Символом v обозначен модуль скорости v¯.
Теперь, следуя определению ускорения, можно провести дифференцирование скорости по времени, имеем:
Таким образом, полное ускорение a¯ представляет собой векторную сумму двух компонент. Первое и второе слагаемое называются нормальным и тангенциальным ускорением точки. Подробнее рассмотрим каждую из этих компонент.
Ускорение тангенциальное
Запишем еще раз формулу для этой компоненты полного ускорения:
Это выражение позволяет описать свойства величины at¯:
- Она направлена точно так же, как и сама скорость или противоположно ей, то есть по касательной к траектории. Об этом свидетельствует элементарный вектор ut¯.
- Она характеризует изменение скорости по абсолютной величине, что отражает множитель dv/dt.
Эти свойства позволяют сделать важный вывод: для прямолинейного движения полное и тангенциальное ускорения — это одна и та же величина. В случае криволинейного перемещения полное ускорение всегда больше по модулю, чем тангенциальное. Когда рассматривают физические задачи на прямолинейное равноускоренное движение, то ведут речь именно об этой компоненте ускорения.
Ускорение нормальное
Рассматривая тему скорости, ускорения тангенциального и ускорения нормального, дадим характеристику последней величине. Запишем формулу для нее:
Чтобы записать явно правую часть равенства, воспользуемся следующими соотношениями:
Здесь dL — это пройденный телом путь за промежуток времени dt, r — радиус кривизны траектории. Первое выражение соответствует определению скорости, второе равенство следует из геометрических соображений. Пользуясь этими формулами, получаем конечное выражение для нормального ускорения:
То есть величина an¯ не зависит от изменения скорости, как тангенциальная компонента, а определяется исключительно ее модулем. Нормальное ускорение вдоль нормали к данному участку траектории направлено, то есть к центру кривизны. Например, во время движения по окружности вектор an¯ направлен к ее центру, поэтому нормальное ускорение называют часто центростремительным.
Если за изменение абсолютной величины скорости ответственно ускорение тангенциальное, то нормальная компонента ответственна за изменение вектора скорости, то есть она определяет траекторию перемещения тела.
Ускорение полное, нормальное и тангенциальное
Разобравшись с понятием ускорения и с его компонентами, приведем теперь формулу, которая позволяет определить полное ускорение. Поскольку рассмотренные компоненты направлены под углом 90 o друг к другу, то для определения абсолютной величины их векторной суммы можно использовать теорему Пифагора. Формула для полного ускорения имеет вид:
Направление величины a¯ можно определить по отношению к вектору любой из компонент. Например, угол между a¯ и an¯ вычисляется так:
Учитывая приведенную выше формулу для модуля a¯, можно сделать вывод: при равномерном движении по окружности полное ускорение совпадает с центростремительным.
Решение задачи
Пусть тело движется по окружности радиусом 1 метр. Известно, что его скорость изменяется по следующему закону:
Необходимо определить ускорение тангенциальное и нормальное ускорение в момент t = 4 секунды.
Для тангенциального имеем:
Для того чтобы найти модуль ускорения нормального, сначала следует вычислить значение скорости в заданный момент времени. Имеем:
Теперь можно воспользоваться формулой для an:
Таким образом, мы определили все величины, которые требовалось найти для решения задачи.
.</li>
<li>Интернет-портал Gym1belovo.smartlearn.ru (Источник).</li>
<li>Интернет-портал Studopedia.info (Источник).</li>
</ol>
<p style=) Если вы нашли ошибку или неработающую ссылку, пожалуйста, сообщите нам – сделайте свой вклад в развитие проекта.
Если вы нашли ошибку или неработающую ссылку, пожалуйста, сообщите нам – сделайте свой вклад в развитие проекта. 

Ускорение – это величина, которая характеризует быстроту изменения скорости.
Например, автомобиль, трогаясь с места, увеличивает скорость движения, то есть движется ускоренно. Вначале его скорость равна нулю. Тронувшись с места, автомобиль постепенно разгоняется до какой-то определённой скорости. Если на его пути загорится красный сигнал светофора, то автомобиль остановится. Но остановится он не сразу, а за какое-то время. То есть скорость его будет уменьшаться вплоть до нуля – автомобиль будет двигаться замедленно, пока совсем не остановится. Однако в физике нет термина «замедление». Если тело движется, замедляя скорость, то это тоже будет ускорение тела, только со знаком минус (как вы помните, скорость – это векторная величина).
Среднее ускорение
Среднее ускорение> – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:
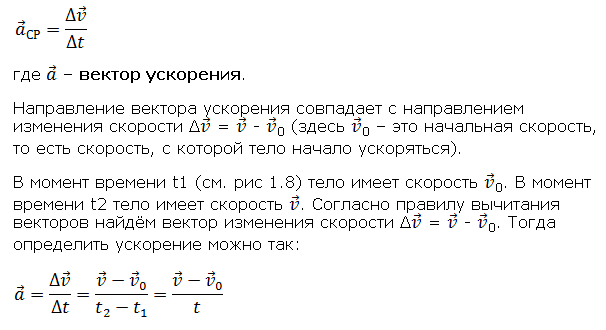
Рис. 1.8. Среднее ускорение.В СИ единица ускорения – это 1 метр в секунду за секунду (или метр на секунду в квадрате), то есть

Метр на секунду в квадрате равен ускорению прямолинейно движущейся точки, при котором за одну секунду скорость этой точки увеличивается на 1 м/с. Иными словами, ускорение определяет, насколько изменяется скорость тела за одну секунду. Например, если ускорение равно 5 м/с2, то это означает, что скорость тела каждую секунду увеличивается на 5 м/с.
Мгновенное ускорение
Мгновенное ускорение тела (материальной точки) в данный момент времени – это физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю. Иными словами – это ускорение, которое развивает тело за очень короткий отрезок времени:
![]()

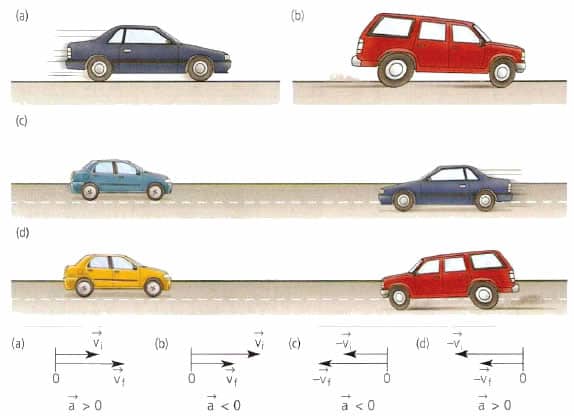
При ускоренном прямолинейном движении скорость тела возрастает по модулю, то есть
v2 > v1
а направление вектора ускорения совпадает с вектором скорости ![]()
Если скорость тела по модулю уменьшается, то есть
v2 < v1
то направление вектора ускорения противоположно направлению вектора скорости ![]() Иначе говоря, в данном случае происходит замедление движения, при этом ускорение будет отрицательным (а < 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
Иначе говоря, в данном случае происходит замедление движения, при этом ускорение будет отрицательным (а < 0). На рис. 1.9 показано направление векторов ускорения при прямолинейном движении тела для случая ускорения и замедления.
Рис. 1.9. Мгновенное ускорение.
При движении по криволинейной траектории изменяется не только модуль скорости, но и её направление. В этом случае вектор ускорение представляют в виде двух составляющих (см. следующий раздел).
Тангенциальное ускорение
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Рис. 1.10. Тангенциальное ускорение.
Направление вектора тангенциального ускорения ![]() (см. рис. 1.10) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
(см. рис. 1.10) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение
Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой ![]() Вектор нормального ускорения направлен по радиусу кривизны траектории.
Вектор нормального ускорения направлен по радиусу кривизны траектории.
Полное ускорение
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
(согласно теореме Пифагора для прямоугольно прямоугольника).
Направление полного ускорения также определяется правилом сложения векторов:
![]()
