![]()
Загрузить PDF
![]()
Загрузить PDF
Вектор является геометрическим объектом, он характеризуется направлением и величиной. Его можно представить в виде отрезка с начальной точкой на одном конце и стрелкой на втором, при этом длина отрезка соответствует величине вектора, а стрелка указывает на его направление. Нормирование вектора является стандартной операцией в математике, на практике она используется в компьютерной графике.
-

1
Определим единичный вектор. Единичным вектором вектора A называется такой вектор, направление которого совпадает с направлением вектора A, а длина равна 1. Можно строго доказать, что каждый вектор имеет один и только один соответствующий ему единичный вектор.
-
2
Узнайте, что такое нормирование вектора. Это процедура нахождения единичного вектора для заданного вектора A.
-
3
Определим связанный вектор. В декартовой системе координат связанный вектор выходит из начала координат, то есть для 2-мерного случая из точки (0,0). Это позволяет задавать вектор лишь координатами его конечной точки.
-
4
Освойте запись векторов. Если ограничиться связанными векторами, то в записи A = (x, y) пара координат (x,y) указывает на конечную точку вектора A.
Реклама




-
1
Установите, что известно. Из определения единичного вектора мы знаем, что начальная точка и направление этого вектора совпадают с аналогичными характеристиками вектора A. Кроме того, длина единичного вектора равна 1.
-
2
Определите, что необходимо найти. Требуется найти координаты конечной точки единичного вектора.
Реклама


- Найдите конечную точку единичного вектора для вектора A = (x, y). Единичный вектор и вектор А образуют подобные прямоугольные треугольники, поэтому конечная точка единичного вектора будет иметь координаты (x/c, y/c), где необходимо найти c. Кроме того, длина единичного вектора равна 1. Таким образом, согласно теореме Пифагора имеем: [x^2/c^2 + y^2/c^2]^(1/2) = 1 -> [(x^2 + y^2)/c^2]^(1/2) -> (x^2 + y^2)^(1/2)/c = 1 -> c = (x^2 + y^2)^(1/2). То есть единичный вектор вектора A = (x, y) задается выражением u = (x/(x^2 + y^2)^(1/2), y/(x^2 + y^2)^(1/2)).
- Предположим, что вектор A начинается в начале координат, а его конечная точка расположена в (2,3), то есть A = (2,3). Найдем единичный вектор: u = (x/(x^2 + y^2)^(1/2), y/(x^2 + y^2)^(1/2)) = (2/(2^2 + 3^2)^(1/2), 3/(2^2 + 3^2)^(1/2)) = (2/(13^(1/2)), 3/(13^(1/2))). Таким образом, нормирование вектора A = (2,3) приводит к вектору u = (2/(13^(1/2)), 3/(13^(1/2))).
- Обобщим формулу для нормирования вектора на случай пространства с произвольным числом измерений. Чтобы нормировать вектор A (a, b, c, …), необходимо найти вектор u = (a/z, b/z, c/z, …), где z = (a^2 + b^2 + c^2 …)^(1/2).
Об этой статье
Эту страницу просматривали 29 142 раза.
Была ли эта статья полезной?
Норма вектораФормулы, примеры, калькулятор нормы вектора Определение 1. Норма вектора ( эвклидова норма, модуль вектора, длина вектора) x=(x1,x2, …xn)
Пример 1. Найти норму вектора a = (5,-2,7) Решение. Подставляем координаты вектора, получаем норму вектора
Как нормировать векторНормированный вектор – это единичный вектор по направлению. То есть, сохраняется информация только о направлении вектора:
Для того чтобы получить нормированный вектор, необходимо каждую координату исходного вектора разделить на норму вектора. Пример 2. Нормировать вектор a = (5,-2,7) Решение. Подставляем координаты вектора, получаем нормированный вектор
Проверить правильность вычисления нормы вектора, а также найти нормированный вектор можно с помощью калькулятора. |
Категория: Аналитическая геометрия | Просмотров: 12351 | | Теги: вектор | Рейтинг: 0.0/0 |



9.3. Метод собственного вектора
Математические методы позволяют эффективно анализировать весьма сложные и большие системы, модели которых состоят из нескольких уровней. Например, известная модель мировой динамики Форрестера и Медоуза рассматривает ресурсы, население, уровень жизни, капиталовложения, загрязнение среды. Анализ состояния окружающей среды приводит к модели, уровнями которой могут быть: 1) типы загрязнителей SO2, NO4, CO2, CO, стоки вод, твердые отходы, земля), 2) способы очистки, 3) очистительные устройства. Изучение вопроса об общем благосостоянии страны целесообразно проводить по таким уровням: 1) экономика, оборона, здравоохранение; 2) отрасли промышленности; 3) ресурсы; 4) демография. Уровни располагаются по их значимости, т. е. образуют Иерархию. Анализ таких Иерархических систем, сводится прежде всего к тому, чтобы для каждого уровня выбрать Приоритеты и в соответствии с ними расположить объекты этого уровня. Основная цель анализа: выяснить, насколько влияют факторы самого низкого уровня на общую цель. Покажем на конкретном примере, как это делают Методом собственного вектора. Этот метод позволяет расположить рассматриваемые объекты по степени их значимости путем попарного сравнения по различным независимым признакам.
На должность юриста крупного предприятия претендуют трое (обозначим их А, В, С). Директор предприятия в большом затруднении, т. к. среди претендентов нет такого, кто превосходил бы остальных по всем параметрам. Один имеет больший опыт, зато другой имеет лучшее образование и опубликовал несколько научных работ; третий известен своей исключительной ответственностью и добросовестностью и т. д. Как выбрать Наилучшего по совокупности качеств? Тут директор вспомнил, что в институте экологии и права, где он учился, им преподавали математику, и, в частности, рассказывали о применении математических методов в теории принятия решений. Покопавшись в своих архивах, директор нашел лекции по математике и решил воспользоваться методом собственных векторов, применяемом при изучении иерархических систем.
Во-первых, он выбрал 3 основных критерия, по которым будут сравниваться кандидаты: профессионализм и опыт (критерий К1), ответственность и добросовестность (К2), организаторские способности (K3). По такому важному критерию как честность и порядочность претендентов сравнить было невозможно — у всех троих в характеристиках было написано по этому поводу практически одно и то же. Первая задача состояла в том, чтобы расположить эти критерии в порядке важности. Вторая задача состояла в том, чтобы сравнить кандидатов между собой по каждому из этих критериев, приписав каждому из них определенный балл.
Этап первый: сравнение критериев.
Исходя из своего жизненного и профессионального опыта, директор полагал, что критерий К1 важнее, чем критерии К2 и К3, причем, если сравнивать их количественно, в баллах, то К1 : К2
5 : 3. При этом, если, сравнивать последние два качества между собой, то они примерно равноценны, т. е. можно считать, что K2 : K3
1 : 1. Далее директор составил матрицу К Размером 3´3, т. е. таблицу с тремя строками и тремя столбцами, куда занес отношения указанных баллов:
Число, стоящее на пересечении строки с номером I и столбца с номером J, обычно обозначают АIj. Поэтому у нас A11 = 1, A22 = 1, А33 = 1, A12 = 5/4, A13 = 5/3, А23 = 1, и т. д. Заметьте, что числа Aij и АJi являются взаимно обратными.
Все дальнейшие вычисления будем проводить вместе с директором приближенно, округляя до сотых долей, причем нам понадобятся только числа А12 = 1,25; A13 = 1,67 и A23 = 1.
Прежде всего находят так называемое Главное собственное число L матрицы К по формуле

Пользуясь калькулятором, получаем:

Теперь находим координаты W1, W2 и W3 так называемого Главного собственного вектора матрицы К по формулам


Подставляя сюда наши значения А12 = 1,25; A13 = 1,67;
A23 = 1, последовательно получаем:
Теперь собственный вектор  (W1, W2, W3) Нужно Нормировать, т. е. каждую координату разделить на сумму всех координат. Имеем:
(W1, W2, W3) Нужно Нормировать, т. е. каждую координату разделить на сумму всех координат. Имеем:
Сумма полученных чисел равна единице. Обозначим вектор, координатами которого являются эти числа, также буквой :

Этот вектор называется Вектором приоритетов. Согласно теории, качества К1, К2 и K3 можно расположить по приоритету с баллами 0,42; 0,30 и 0,28 соответственно.
Этап второй: сравнение претендентов по качеству К1. Из имеющихся у него документов (характеристик, рекомендаций, отзывов, научных публикаций) директор сумел сравнить между собой каждую пару претендентов по качеству К1. У него получилось А : В
1 : 2 (т. е. у В Балл в 2 раза выше, чем у А), А : С
2 : 1. Поэтому матрица К1 попарных сравнений получилась такая
Из нее видно, что А12 = 0,5, А13 = 0,33, А23 = 2. Подставляя эти числа в формулы (1)-(4), как и в предыдущем случае находим:
Итак, в этом случае вектор приоритетов будет (0,17; 0,48; 0,35), т. е., если сравнивать, претендентов по качеству К1, то они получают баллы 0,17, 0,48 и 0,35 соответственно.
Этап третий: сравнение претендентов по качеству K2:
Как было видно из документов, каждые двое из претендентов работали некоторое время в одной и той же фирме и вели примерно одинаковые дела. Просмотрев последние и оценив качество исполнения, директор получил следующие отношения при попарном сравнении по критерию K2: А : В
3 : 4. Запишем матрицу К2 попарных сравнений:
Вектор приоритетов будет (0,38; 0,26; 0,36), так что по качеству К2 претенденты получают баллы 0,38, 0,26 и 0,36 соответственно.
Этап четвертый: сравнение по качеству K3. Поскольку никто из претендентов прежде не находился на руководящей работе, то директор, исходя из весьма туманных соображений и своей интуиции, смог только оценить вероятность того, что тот или иной претендент станет хорошим руководителем. Получились вероятности 0,8, 0,7 и 0,6 соответственно. Таким образом, удалось обойтись без попарного сравнения. Разделив каждое из указанных чисел на их сумму 0,8 + 0,7 + 0,6 = 2,1, находим вектор приоритетов: (0,38; 0,33; 0,29).
Этап пятый: получение окончательно результата. Согласно теории, окончательное распределение мест получается следующим образом. Составим из векторов  ,
,  и
и  матрицу 3´3, записав их координаты в столбцы:
матрицу 3´3, записав их координаты в столбцы:
Затем умножим эту матрицу на матрицу-столбец

Составленную из координат вектора . По правилу умножения матриц,
Итак, окончательное распределение мест следующее:
Претендент А набрал 0,29 балла, претендент В — 0,37 балла, претендент C — 0,34 балла. Метод собственного вектора отдал предпочтение претенденту В.
Предупреждение: не попадайте под гипнотическое воздействие чисел! Несмотря на объективность математических методов, полученный результат нельзя рассматривать как истину в последней инстанции. Хотя бы потому, что выбор исходного материала (т. е. чисел А12, а13 и А23, входящих в матрицы К1, К2, К3), был в значительной степени субъективным. Поэтому и претендент С, имеющий примерно такой же балл, как и В, Также имеет шанс на успех, в особенности, если он не курит или согласен на меньшую зарплату.
1. Описанным методом можно сравнивать любое число кандидатов и по любому числу критериев, однако при большом их числе придется пользоваться другими формулами, приведенными, например, в книге Т. Саати «Принятие решений».
2. Вычислительные трудности, разумеется, можно переложить на ЭВМ.
3. Мы сознательно упростили ситуацию, опустив некоторые тонкости, связанные с оценкой метода. О них также можно прочитать в книге Т. Саати.
4. Еще раз отметим, в чем сила описанного метода. Сравнить каждые два объекта между собой по одному критерию довольно просто, и это дает возможность сравнительно легко заполнить матрицу попарных сравнений. Но затем, с помощью несложных вычислений, мы находим ответ уже на довольно трудный вопрос: какой из рассматриваемых объектов превосходит остальные по совокупности всех критериев.
Метод собственного вектора можно применять для анализа самых разнообразных проблем, о которых шла речь в начале параграфа. Например, автор упомянутой выше книги проанализировал этим методом рост терроризма для агентства по контролю над вооружениями и разоружением в Вашингтоне.
В качестве самостоятельной задачи попробуйте оценить претендентов на должность мэра Вашего города, выбрав критерии по своему усмотрению.
Как найти нормированный собственный вектор
Найдем такие вектора (называются собственными векторами) v
и такие числа – значения (называются собственными значениями) l
матрицы A, для v, l и A выполняется:
A*v = l*v.
Также вычисляется кратность собственных значений и находит характеристическое уравнение матрицы.
© Контрольная работа РУ – калькуляторы онлайн
Где учитесь?
Для правильного составления решения, укажите:
Собственные векторы матрицы
Онлайн калькулятор нахождение собственных чисел и собственных векторов – Собственный вектор — понятие в линейной алгебре, определяемое для квадратной матрицы или произвольного линейного преобразования как вектор, умножение матрицы на который или применение к которому преобразования даёт коллинеарный вектор — тот же вектор, умноженный на некоторое скалярное значение, называемое собственным числом матрицы или линейного преобразования.
Данный калькулятор поможет найти собственные числа и векторы, используя характеристическое уравнение.
[spoiler title=”источники:”]
http://www.kontrolnaya-rabota.ru/s/matrix/sobstvennyie/
http://allcalc.ru/node/648
[/spoiler]
Скалярное
произведение вектора самого на себя
называется скалярным квадратом. Эта
величина

определяет
квадрат длины вектора x.
Для обозначения длины (называемой
также нормой вектора)
используется обозначение
![]()
Например,

Рис.
16 Норма вектора
Вектор
единичной длины (||x||
= 1) называется нормированным. Ненулевой
вектор (x ≠ 0)
можно нормировать, разделив его на
длину, т.е. x =
||x||
(x/||x||)
= ||x|| e.
Здесь e =x/||x||
— нормированный вектор.
Векторы называются
ортонормированными, если все они
нормированы и попарно ортогональны.
Содержание
1.10. Угол между векторами
Скалярное
произведение определяет и угол φ
между двумя векторами x и y
![]()
Если вектора
ортогональны, то cosφ = 0 и φ = π/2, а если
они колинеарны, то cosφ = 1 и φ = 0.
Содержание
1.11. Векторное представление матрицы
Каждую
матрицу A размера I×J можно
представить как набор векторов

Здесь
каждый вектор aj является j-ым
столбцом, а вектор-строка bi является i-ой
строкой матрицы A

Содержание
1.12. Линейно зависимые векторы
Векторы
одинаковой размерности (N)
можно складывать и умножать на число,
также как матрицы. В результате получится
вектор той же размерности. Пусть имеется
несколько векторов одной
размерности x1, x2,…,xK и
столько же чисел α α1,
α2,…,αK.
Вектор
y =
α1x1+
α2x2+…+
αKxK
называется линейной
комбинацией векторов xk.
Если
существуют такие ненулевые числа αk ≠
0, k =
1,…, K,
что y = 0,
то такой набор векторов xk называется линейно
зависимым.
В противном случае векторы называются
линейно независимыми. Например,
векторы x1 =
(2, 2)t и x2 =
(−1, −1)t линейно
зависимы, т.к. x1 +2x2 = 0
Содержание
1.13. Ранг матрицы
Рассмотрим
набор из K векторов x1, x2,…,xK размерности N.
Рангом этой системы векторов называется
максимальное число линейно-независимых
векторов. Например в наборе

имеются
только два линейно независимых вектора,
например x1 и x2,
поэтому ее ранг равен 2.
Очевидно,
что если векторов в наборе больше, чем
их размерность (K>N),
то они обязательно линейно зависимы.
Рангом
матрицы (обозначается
rank(A))
называется ранг системы векторов, из
которых она состоит. Хотя любую матрицу
можно представить двумя способами
(векторы столбцы или строки), это не
влияет на величину ранга, т.к.
rank(A)
= rank(At).
Содержание
1.14. Обратная матрица
Квадратная
матрица A называется
невырожденной, если она имеет
единственную обратную матрицу A-1,
определяемую условиями
AA−1 = A−1A = I.
Обратная матрица
существует не для всех матриц. Необходимым
и достаточным условием невырожденности
является
det(A)
≠ 0 или rank(A)
= N.
Обращение матрицы
— это сложная процедура, для выполнения
которой существуют специальные программы.
Например,
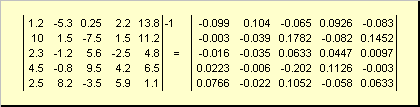
Рис.
17 Обращение матрицы
Приведем формулы
для простейшего случая — матрицы 2×2

Если
матрицы A и B невырождены,
то
(AB)−1 = B−1A−1.
Содержание
1.15. Псевдообратная матрица
Если
матрица A вырождена
и обратная матрица не существует, то в
некоторых случаях можно
использовать псевдообратную матрицу,
которая определяется как такая матрица A+,
что
AA+A = A.
Псевдобратная
матрица — не единственная и ее вид
зависит от способа построения. Например
для прямоугольной матрицы можно
использовать метод
Мура-Пенроуза.
Если число столбцов
меньше числа строк, то
A+=(AtA)−1At
Например,

Рис.
17a Псевдообращение
матрицы
Если же число
столбцов больше числа строк, то
A+=At(AAt)−1
Содержание
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
![]()
Download Article
![]()
Download Article
A vector is a geometric object that has direction and magnitude. It may be represented as a line segment with an initial point (starting point) on one end and an arrow on the other end, such that the length of the line segment is the magnitude of the vector and the arrow indicates the direction of the vector. Vector normalization is a common exercise in mathematics and it also has practical applications in computer graphics.
-
1
Define a unit vector. The unit vector of a vector A is the vector with the same initial point and direction as A, but with a length of 1 unit.[1]
It can be mathematically proven that there is one and only one unit vector for each given vector A. -
2
Define the Normalization of a vector. This is the process of identifying the unit vector for a given vector A.[2]
Advertisement
-
3
Define a bound vector. A bound vector in Cartesian space has its initial point at the origin of the coordinate system, expressed as (0,0) in two dimensions. This allows you to identify a vector solely in terms of its terminal point.[3]
-
4
Describe vector notation. By restricting ourselves to bound vectors, A = (x, y) where the coordinate pair (x,y) indicates the location of the terminal point for vector A.[4]




Advertisement
-
1
Establish the known values. From the definition of the unit vector, we know that the initial point and direction of the unit vector is the same as the given vector A. Furthermore, we know the length of the unit vector is 1.[5]
-
2
Determine the unknown value. The only variable we need to calculate is the terminal point of the unit vector.


Advertisement
-
1
Find the terminal point for the unit vector of vector A = (x, y). From the proportionality of similar triangles, you know that any vector that has the same direction as vector A will have a terminal point (x/c, y/c) for some c. Furthermore, you know the length of the unit vector is 1.[6]
Therefore, by the Pythagorean Theorem, [x^2/c^2 + y^2/c^2]^(1/2) = 1 -> [(x^2 + y^2)/c^2]^(1/2) -> (x^2 + y^2)^(1/2)/c = 1 -> c = (x^2 + y^2)^(1/2). Therefore, the unit vector u for the vector A = (x, y) is given as u = (x/(x^2 + y^2)^(1/2), y/(x^2 + y^2)^(1/2))
-
1
Let vector A be a vector with its initial point at the origin and terminal point at (2,3), such that A = (2,3). Calculate the unit vector u = (x/(x^2 + y^2)^(1/2), y/(x^2 + y^2)^(1/2)) = (2/(2^2 + 3^2)^(1/2), 3/(2^2 + 3^2)^(1/2)) = (2/(13^(1/2)), 3/(13^(1/2))). Therefore, A = (2,3) normalizes to u = (2/(13^(1/2)), 3/(13^(1/2))).
Advertisement
-
1
Generalize the equation for vector normalization in space of any dimension.[7]
A vector A (a, b, c, …), u = (a/z, b/z, c/z, …) where z = (a^2 + b^2 + c^2 …)^(1/2).
Add New Question
-
Question
What is the direction of cosine?

A cosine does not have direction. It is a ratio of one length to another.
Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
Thanks for submitting a tip for review!
References
About This Article
Article SummaryX
A vector is an object that has both magnitude (sometimes called size or length) and direction. Vectors are usually represented by drawing an arrow, where the direction of the arrow represents the direction of the vector, and the length of the arrow represents its magnitude. Normalizing a vector involves converting it to a “unit vector” with a standard magnitude, usually 1, while preserving the vector’s original direction. To do this, start by determining the start and end points of your vector. For instance, the vector may start at (0,0) on the x-y axis, and end at (3,4). This vector moves up from left to right. From there, you can determine that your unit vector will have the same starting point and direction as the original vector. You also know that the length of your unit vector is 1. Now you’ll need to calculate the end point, or terminal point, of your unit vector. First, calculate the length of the original vector using the Pythagorean theorem, a^2 + b^2 = c^2. Think of the vector as a right triangle, where sides A and B equal the values of the end coordinates in the x and y axes, and the hypotenuse is the length of the vector. In this case, we know that 32 + 42 = 25. Take the square root of 25 to get 5, the length of the vector. Finally, divide the x and y coordinates by the length of the vector to get the endpoint coordinates of your normalized vector. Now you know that the start point of your unit vector is (0,0), its end point is (3/5, 4/5), its magnitude is 1, and it moves up as you go from left to right along the x axis. To learn how to normalize a vector in 2-dimensional or n-dimensional space, keep reading!
Did this summary help you?
Thanks to all authors for creating a page that has been read 205,912 times.
