Тема 2: метрология сигналов
Физическая величина более точно определяется уравнением, чем измерением.
Макс Планк (XVIII-XIX в).
(Немецкий физик – теоретик).
Теоретикам свойственно намекать о важности своих занятий. Сам себя не похвалишь, как оплеванный ходишь. Между тем, уравнение только математическая модель физической величины. А без измерений понятия точности вообще не существует.
Борис Старцев (XX в).
(Уральский геофизик – практик).
Содержание: 2.1. Пространство сигналов. Линейное пространство сигналов. Координатный базис пространства. Норма сигналов. Метрика сигналов. 2.2. Мощность и энергия сигналов. Понятия мощности и энергии сигналов. Скалярное произведение сигналов. 2.3. Обобщенный ряд Фурье. Ортогональные сигналы. Разложение сигнала в ряд Фурье. Ортонормированные системы функций. Разложение энергии сигнала. 2.4. Функции корреляции сигналов. Корреляционные функции сигналов. Взаимная корреляционная функция. Литература.
В данной теме метрология сигналов рассматривается, в основном, на уровне понятий и базовых определений, предваряя их более подробное изучение в дальнейших темах курса. Это объясняется тем, что при детальном изучении каких-либо характеристик или свойств сигналов их рассмотрение не может выполняться в отрыве от других метрологических характеристик рассматриваемых типов сигналов и требует определенной ориентировки в общей метрологии сигналов, хотя бы на уровне понятий.
Рекомендуемые материалы
2.1. Пространство сигналов [1,3,16].
Важнейшее свойство аналоговых и дискретных сигналов заключается в том, что их линейные комбинации также являются аналоговыми или дискретными сигналами. Линейные комбинации цифровых сигналов, в силу их ограничения по разрядности, в принципе относятся к разряду нелинейных операций, однако последним фактором можно пренебречь, если ошибки, которые вносятся в результаты наблюдений при квантовании отсчетов, достаточно малы по сравнению с шумами зарегистрированной информации. При дискретизации и квантовании данных непосредственно на входах в ЭВМ последнее выполняется практически всегда, поскольку ошибки определяются разрядностью ЭВМ и программными системами обработки данных, которые обычно не ниже 6-12 десятичных разрядов.
Линейное пространство сигналов. Пусть L{s1(t), s2(t), …}- множество сигналов, которые имеют какие-то общие свойства и определенную структуру связи между сигналами. Например, множество может состоять из сигналов вида sn(t) = Ancos(wnt+jn) – гармонических колебаний с определенными значениями амплитуд, частот и начальных фаз. Путем введения структурных ограничений множество сигналов может быть превращено в функциональное пространство сигналов. Так, множество сигналов L образует линейное пространство сигналов, если для него справедливы следующие аксиомы:
1. Для любых сигналов u(t) Î L и v(t) Î L существует их сумма s(t) = u(t)+v(t), которая также содержится в L, при этом операция суммирования коммутативна: u(t)+v(t) = v(t)+u(t), и ассоциативна: u(t)+(v(t)+x(t)) = (u(t)+v(t))+x(t).
2. Для любого сигнала s(t) Î L и числа a определен сигнал y(t) = as(t), у(t) Î L.
3. Множество L содержит такой нулевой элемент Æ, что для всех сигналов u(t) Î L выполняется равенство u(t)+Æ = u(t).
Сигналы могут описываться как вещественными, так и комплексными функциями, и линейные пространства также могут быть вещественными или комплексными.
Множество L, для которого выполняются данные аксиомы, при анализе сигналов и систем может рассматриваться как специальным образом сконструированное многомерное (в пределе – бесконечномерное) геометрическое пространство. Сигналы таких линейных пространств часто называют векторами в силу аналогии их свойств со свойствами векторов. Соответственно, для математического анализа систем и сигналов в линейном пространстве может использоваться математика векторов.
Пример. Множество сигналов L состоит из импульсных сигналов произвольной формы с амплитудой не более 10 вольт. Образуют ли эти сигналы линейное пространство?
Нет, не образуют, так как не выполняется, по крайней мере, первая аксиома линейного пространства (сумма двух сигналов с амплитудой более 5 вольт превышает 10 вольт). Требуются дополнительные структурные ограничения по параметрам сигналов.
Координатный базис пространства. В пространстве сигналов можно выделить координатный базис пространства – подмножество векторов {е1, е2, е3, …} со свойствами координатных осей, по которым можно разложить произвольный сигнал, принадлежащий линейному пространству.
Совокупность векторов ei пространства L является линейно независимой и образует координатный базис пространства, если равенство  aiei = Æ выполняется только в случае одновременного обращения в нуль всех числовых коэффициентов ai. При этом произвольный сигнал s(t) может быть разложен по координатному базису ei в виде
aiei = Æ выполняется только в случае одновременного обращения в нуль всех числовых коэффициентов ai. При этом произвольный сигнал s(t) может быть разложен по координатному базису ei в виде
s(t) =сiei, (2.1.1)
где числа сi – проекции сигнала s(t) на координатный базис.
Пример.
Линейное пространство образовано сигналами, которые описываются многочленом вида
s(t) = cntn.
cntn.
Координатным базисом в пространстве является система одночленов
{е0 = 1, е1 = t, e2 = t2, … , еn = tn}.
Норма сигналов. Линейное пространство сигналов L является нормированным, если каждому сигналу пространства однозначно сопоставлено число ||s(t)|| – норма (norm) сигнала, и выполняются следующие аксиомы:
1. Норма неотрицательна и равна нулю тогда и только тогда, когда сигнал равен нулю (||s(t)|| = Æ, при s(t) = Æ).
2. Для любого числа b должно быть справедливо равенство: ||bs(t)|| = |b| × ||s(t)||.
3. Если v(t) и u(t) – сигналы из пространства L, то должно выполняться неравенство треугольника: ||v(t)+u(t)|| £ ||v(t)|| + ||u(t)||.
В линейном пространстве сигналов норма является аналогом длины векторов. В математике существуют различные формы норм. Для анализа сигналов чаще всего используются квадратичные нормы:
||s(t)|| = . (2.1.2)
. (2.1.2)
Соответственно, для дискретных сигналов:
||s(t)|| = . (2.1.2′)
. (2.1.2′)
Для комплексных сигналов:
||s(t)|| = , (2.1.2”)
, (2.1.2”)
где s*(t) – величины, комплексно сопряженные с s(t).
Метрика сигналов. Линейное пространство сигналов L является метрическим, если каждой паре сигналов u(t) Î L и v(t) Î L однозначно сопоставляется неотрицательное число r(u(t),v(t)) – метрика (metric) или расстояние между векторами, и выполняются аксиомы:
1. r(u(t),v(t)) = r(v(t),u(t)) – рефлексивность метрики.
2. r(u(t),u(t)) = 0 для любых u(t) Î L.
3. r(u(t),v(t)) £ r(u(t),a) + r(a,v(t)) для любых a Î L.
Метрика определяется нормой разности двух сигналов:
r(u(t),v(t)) = || u(t) – v(t) ||. (2.1.3)
В свою очередь норму можно отождествлять с расстоянием от выбранного элемента пространства до нулевого: ||u(t)|| = r(u(t),Æ).
По метрике сигналов можно судить, например, о том, насколько точно один сигнал может быть аппроксимирован другим сигналом или насколько изменяется выходной сигнал относительно входного при прохождении через какое-либо устройство.

Рис. 2.1.1.
Пример. Сигнал на интервале (0,Т) представляет собой половину периода синусоиды амплитудой A: s(t) = A×sin(pt/T), 0 £ t £ T. Требуется аппроксимировать сигнал прямоугольным импульсом п(t).
Если принять амплитуду импульса п(t) равной В, то квадрат расстояния между сигналами: r2(s,п) = (A sin(pt/T)-В)2 dt = A2T/2 – 4ABT/p + B2T.
(A sin(pt/T)-В)2 dt = A2T/2 – 4ABT/p + B2T.
Для решения задачи требуется найти минимум выражения r2(s,п). Дифференцируем полученное выражение по В, приравниваем нулю и, решая относительно В, находим значение экстремума: В = 2A/p » 0.64А. Это искомое значение минимума функции r2(s,п), так как вторая производная функции по В положительна. При этом минимальное значение метрики: rmin » 0.31A . Вычислим нормы сигналов при А = 1:
. Вычислим нормы сигналов при А = 1:
Еs = А2sin2 (pt/T) dt = A2 T/2 = 10. Норма: ||s(t)|| = = 0.707 A » 3.16.
= 0.707 A » 3.16.
Еп = B2dt = B2 T » 8.1. Норма: ||п(t)|| =  = B » 2.85.
= B » 2.85.
2.2. Мощность и энергия сигналов [1,3,16].
Понятия мощности и энергии в теории сигналов не относятся к характеристикам каких-либо физических величин сигналов, а являются их количественными характеристиками, отражающими определенные свойства сигналов и динамику изменения их значений (отсчетов) во времени, в пространстве или по любым другим аргументам.
Для произвольного, в общем случае комплексного, сигнала s(t) = a(t)+jb(t), где а(t) и b(t) – вещественные функции, мгновенная мощность (instantaneous power) сигнала по определению задается выражением:
w(t) = s(t)s*(t) = [a(t)+jb(t)][(a(t)-jb(t)] = a2(t)+b2(t) = |s(t)|2, (2.2.1)
т.е. функция распределения мгновенной мощности по аргументу сигнала равна квадрату функции его модуля, для вещественных сигналов – квадрату функции амплитуд.
Энергия сигнала (также по определению) равна интегралу от мощности по всему интервалу существования или задания сигнала. В пределе:
Еs = w(t)dt =|s(t)|2dt. (2.2.2)
w(t)dt =|s(t)|2dt. (2.2.2)
По существу, мгновенная мощность является плотностью мощности сигнала, так как измерения мощности возможны только через энергию, выделяемую на интервалах ненулевой длины:
w(t) = (1/Dt) |s(t)|2dt.
|s(t)|2dt.
Энергия сигналов может быть конечной или бесконечной. Конечную энергию имеют финитные сигналы и сигналы, затухающие по своим значениям в пределах конечной длительности, которые не содержат дельта-функций и особых точек (разрывов второго рода и ветвей, уходящих в бесконечность). В противном случае их энергия равна бесконечности. Бесконечна также энергия периодических сигналов.
Как правило, сигналы изучаются на определенном интервале Т, для периодических сигналов – в пределах одного периода Т, при этом средняя мощность (average power) сигнала:
WT(t) = (1/T) w(t) dt = (1/T)|s(t)|2 dt. (2.2.3)
w(t) dt = (1/T)|s(t)|2 dt. (2.2.3)
Понятие средней мощности может быть распространено и на незатухающие сигналы, энергия которых бесконечно велика. В случае неограниченного интервала Т строго корректное определение средней мощности сигнала должно производиться по формуле:
Ws =  w(t) dt. (2.2.3′)
w(t) dt. (2.2.3′)
Квадратный корень из значения средней мощности характеризует действующее (среднеквадратическое) значение сигнала (root mean sqare, RMS).
Применительно к электрофизическим системам, данным понятиям мощности и энергии соответствуют вполне конкретные физические величины. Допустим, что функцией s(t) отображается электрическое напряжение на резисторе, сопротивление которого равно R Ом. Тогда рассеиваемая в резисторе мощность, как известно, равна (в вольт-амперах):
w(t) = |s(t)|2/R,
а полная выделенная на резисторе тепловая энергия определяется соответствующим интегрированием мгновенной мощности w(t) по интервалу задания напряжения s(t) на резисторе R. Физическая размерность мощности и энергии в этом случае определяется соответствующей физической размерностью функции напряжения s(t) и сопротивления резистора R. Для безразмерной величины s(t) при R=1 это полностью соответствует выражению (2.2.1). В теории сигналов в общем случае сигнальные функции s(t) не имеют физической размерности и могут быть формализованным отображением любого процесса или распределения какой-либо физической величины, при этом понятия энергии и мощности сигналов используются в более широком смысле, чем в физике. Они представляют собой специфические метрологические характеристики сигналов.
Из сравнения выражений (2.1.2) и (2.2.2) следует, что энергия и норма сигнала связаны соотношениями:
Es = ||s(t)||2, ||s(t)|| =  (2.2.4)
(2.2.4)
Пример. Цифровой сигнал задан функцией s(n) = {0,1,2,3,4,5,4,3,2,1,0,0,0,0….}.
Энергия сигнала: Es =  s2(n) = 1+4+9+16+25+16+9+4+1 = 85. Норма: ||s(n)|| =
s2(n) = 1+4+9+16+25+16+9+4+1 = 85. Норма: ||s(n)|| =  » 9.22
» 9.22
Скалярное произведение сигналов. Вычислим энергию суммы двух произвольных сигналов u(t) и v(t):
E =[u(t)+v(t)]2 dt = Eu + Ev + 2u(t)v(t) dt. (2.2.5)
Как следует из этого выражения, энергии сигналов (а равно и их мощности), в отличие от самих сигналов, в общем случае не обладают свойством аддитивности. Энергия суммарного сигнала u(t)+v(t), кроме суммы энергий составляющих сигналов, содержит в себе и так называемую энергию взаимодействия сигналов или взаимную энергию:
Euv = 2u(t)v(t) dt. (2.2.6)
По аналогии с математикой векторов интеграл выражения (2.2.6) называют скалярным произведением вещественных сигналов:
Пuv = (u(t),v(t)) =u(t)v(t) dt = ||u||×||v|| cos j, (2.2.7)
Отсюда, косинус угла между сигналами:
cos j = Пuv/(||u||×||v||). (2.2.8)
Скалярное произведение обладает следующими свойствами:
1. (u,v) ³ 0;
2. (u,v) = (v,u);
3. (au,v) = a(u,v), где а – вещественное число;
4. (u+v, a) = (u,a) + (v,a).
Линейное пространство с таким скалярным произведением называется гильбертовым пространством Н (второе распространенное обозначение – L2). В нем справедливо фундаментальное неравенство Коши-Буняковского:
|Пuv| £ ||u||×||v||. (2.2.9)
Для комплексного гильбертова пространства скалярное произведение вычисляется по формуле:
Пuv =u(t)v*(t) dt. (2.2.7′)
Пример. Имеется два смещенных во времени прямоугольных импульса с одинаковой амплитудой и длительностью: s1(t) = 2 при 0 £ t £ 5, s1(t) = 0 при других t; и s2(t) = 2 при 4 £ t £ 9, s2(t) = 0 при других t.
Энергии сигналов одинаковы: ||s1||2 = ||s2||2 =  s12(t)dt =
s12(t)dt = s22(t)dt = 20.
s22(t)dt = 20.
Скалярное произведение: (s1,s2) =  s1(t) s2(t) dt = 8.
s1(t) s2(t) dt = 8.
Отсюда имеем: cos j = (s1,s2)/ (||s1||×||s2||) = 8/20 = 0.4 и j » 1.16 радиан » 66о
Скалярное произведение определяет также расстояние между сигналами (метрику сигналов). Для квадрата метрики сигналов имеем:
r2(u,v) =[u(t)-v(t)]2 dt = Eu + Ev – 2×||u||×||v|| cos j.
При j = 0 (cos j = 1) сигналы “совпадают по направлению” и расстояние между ними минимально. При j = p/2 (cos j = 0) сигналы “перпендикулярны друг другу”, иначе говоря – ортогональны, и проекции сигналов друг на друга равны 0. При j = p (cos j = -1) сигналы “противоположны по направлению” и расстояние между сигналами максимально. Фактор расстояния между сигналами играет существенную роль при их селекции в многоканальных системах. Если функции u(t) и v(t) являются случайными, то значение cos j играет роль коэффициента корреляции между случайными процессами U(t) и V(t).
Дискретные сигналы обычно рассматриваются в пространстве Евклида (обозначение пространства – R2). Скалярное произведение двух сигналов в пространстве Евклида – число:
Пuv = (uk,vk) = ukvk,
ukvk,
где n – размерность пространства. При n = 3 это математический прообраз реального трехмерного пространства, в котором сигналы u и v отображаются точками этого пространства.
При обработке данных используются также понятия мощности взаимодействия двух сигналов x(t) и y(t):
wxy(t) = x(t) y*(t), (2.2.10)
wyx(t) = y(t) x*(t),
wxy(t) = w*yx(t).
Для вещественных сигналов:
wxy(t) = wyx(t) = x(t) y(t). (2.2.10′)
С использованием выражений (2.2.10) интегрированием по соответствующим интервалам вычисляются значения средней мощности взаимодействия сигналов на определенных интервалах Т и энергия взаимодействия сигналов.
2.3. Обобщенный ряд Фурье [1,3,11,16].
Ортогональные сигналы. Два сигнала называются ортогональными (orthogonal), если имеют нулевое скалярное произведение (и соответственно нулевую энергию взаимодействия):
Пuv =u(t)v(t) dt = 0.
На рисунке 2.3.1 приведены примеры взаимно ортогональных сигналов. Нулевая энергия взаимодействия двух верхних сигналов обеспечивается их формой (равна нулю сумма положительных и отрицательных значений произведения сигналов), а двух нижних – взаимным расположением (ненулевые значения сигналов не имеют общих точек).

Рис. 2.3.1. Ортогональные сигналы.
Из ортогональности по энергии всегда следует ортогональность сигналов по мощности, но не наоборот. Условия ортогональности по мощности и энергии выполняются одновременно только на конечных временных интервалах, при этом энергия и мощность суммы ортогональных сигналов обладают свойством аддитивности.
Совокупность функций {u0, u1, u2, …}, в пределе – бесконечную, называют системой ортогональных функций на отрезке (t1,t2), если на этом отрезке данные функции взаимно ортогональны, т.е. выполняется условие:
Пuv = ui(t)uj(t) dt = 0, i = 1,2,…, j = 1,2,…, i ¹ j.
ui(t)uj(t) dt = 0, i = 1,2,…, j = 1,2,…, i ¹ j.
Систему ортогональных функций на интервале (t1,t2) называют ортонормированной (orthonormal functions), если все функции системы имеют единичную норму, т.е. выполняются условия:
Пuu =ui2(t) dt = 1, ||ui|| = = 1, i = 1,2,….
= 1, i = 1,2,….
Система ортогональных функций, для которой данное условие не выполняется, всегда может быть превращена в ортонормальную путем нормировки, т.е. деления всех функций на их норму. В линейном пространстве сигналов системы ортогональных функций могут использоваться в качестве координатных базисных функций.
Разложение сигнала в ряд Фурье. Произвольный сигнал s(t) Î H, заданный на интервале (t1,t2), может быть разложен по упорядоченной системе ортогональных базисных функций ui(t) в обобщенный ряд Фурье:
s(t) = ciui(t). (2.3.1)
ciui(t). (2.3.1)
Для нахождения значений коэффициентов сi умножим обе части данного выражения на базисную функцию uk(t) с произвольным номером k и проинтегрируем результаты по переменной t, при этом получим:
s(t)uk(t) dt =ciuiuk dt.
С учетом ортогональности функций u(t), в правой части этого равенства остается только один член суммы с номером i = k, который представляет собой проекцию сигнала – вектора на соответствующее базисное направление:
ck = s(t)uk(t) dt. (2.3.2)
При практическом использовании количество членов ряда (2.3.1) ограничивается определенным значением N, при этом для любого значения N совокупность коэффициентов ci обеспечивают наименьшее по средней квадратической погрешности приближение к заданному сигналу.
В геометрической интерпретации коэффициенты сi представляют собой проекции вектор – сигнала s(t) на соответствующие базисные направления ui(t), т.е. координаты вектора s(t) в N-мерном пространстве (в пределе – бесконечномерном). Соответственно, энергия взаимодействия двух сигналов x(t) и y(t) может вычисляться по скалярному произведению их координатных проекций, которое равно:
Пxy = x(t)y(t) dt =aiui(t) bjuj(t)dt =ai×bi. (2.3.3)
bjuj(t)dt =ai×bi. (2.3.3)
Косинус угла между векторами x(t) и y(t) с использованием выражения (2.2.8):
cos j = ai×bi /(||x(t)||×||y(t)||). (2.3.4)
Возможность разложения непрерывных сигналов в обобщенные ряды Фурье имеет огромное принципиальное значение, так как позволяет вместо изучения несчетного множества точек сигнала ограничиться счетной системой коэффициентов ряда.
К системам базисных функций, которые используются при разложении сигналов, предъявляют следующие основные требования:
– для любого сигнала ряды разложения должны сходиться;
– при ограничении ряда по уровню остаточной погрешности расхождения с заданным сигналом количество членов ряда должно быть минимальным;
– функции должны иметь достаточно простую аналитическую форму;
– коэффициенты разложения должны вычисляться относительно просто.
Согласно теореме Дирехле, любой сигнал s(t), имеющий конечное число точек нарушения непрерывности первого рода и конечный по энергии на интервале (t1,t2), может быть разложен по системе ортонормальных функций, если существуют интегралы модуля сигнала и модуля его первой производной:
|s(t)| dt и |s'(t)| dt.

Рис. 2.3.2. Ортонормированный базис.
Ортонормированные системы функций хорошо известны в математике. Это полиномы Эрмита, Лежандра, Чебышева, функции Бесселя, Лагерра и целый ряд других. При спектральном анализе и обработке сигналов в основном используются два вида ортонормированных функций: гармонические функции и функции Уолша.
Функции ортонормированного базиса u0,u1,u2,… на интервале [0,T], в пределе – бесконечном, на основе гармонических колебаний с кратными частотами приводятся ниже, вид первых пяти функций, включая постоянную составляющую u0, показан на рис. 2.3.2.
u0 = 1/ , uк(t) =
, uк(t) = sin(к2pt/T), uк(t) = cos(к2pt/T), к = 1,2,3, …
sin(к2pt/T), uк(t) = cos(к2pt/T), к = 1,2,3, …
В качестве базисных функций частотного разложения в общем случае принимаются комплексные экспоненциальные функции exp(pt) при p = jf (преобразование Фурье) и p = s+jf (преобразование Лапласа), от которых с использованием формул Эйлера
exp(jwt) = cos(wt) + j sin(wt), exp(-jwt) = cos(wt) – j sin(wt),
cos(wt) = [ехр(jwt)+exp(-jwt)]/2, sin(wt) = [ехр(jwt)-exp(-jwt)]/2j
всегда можно перейти к синус-косинусным функциям. Термин “частотного” обязан своим происхождением независимой переменной данного разложения временных сигналов, которая измеряется в единицах, обратных единицам времени, т.е. в единицах частоты f = 1/|t|. Однако понятие частотного преобразования не следует связывать только с временным представлением сигналов, т.к. математический аппарат преобразования не зависит от физического смысла переменных. Так, например, при переменной “х”, как единице длины, значение f будет представлять собой пространственную частоту – число периодических изменений сигнала на единице длины с размерностью 1/|х|.
Ортонормированная система функций Уолша, по существу, является предельной модификацией системы периодических функций с кратными частотами, при этом функции принимают значения только ±1. Пример четырех первых функций Уолша на интервале Т от –0,5 до 0,5 приведен на рис. 2.3.3. Ортогональность и нормированность функций следует из принципа их построения. Стандартное математическое обозначение функций Уолша: wal(k,q), где k = 0,1,2, … – порядковый номер функции, q = t/T – безразмерная координата (нормированная на интервал Т независимая переменная).

Рис. 2.3.3. Функции Уолша.
Наряду с функциями Уолша применяются также две связанные с ними системы: четные и нечетные функции cal(n,q) = wal(2n,q), – аналогичные косинусам, и sal(n,q) = wal (2n-1,q), – аналогичные синусам.
При разложении сигналов форма спектров Уолша практически тождественна спектрам гармонических функций.
Разложение энергии сигнала. Допустим, что сигнал s(t) разложен в обобщенный ряд Фурье (2.3.1). Вычислим энергию сигнала непосредственной подстановкой выражения (2.3.1) в выражение (2.2.2):
Es =s2(t) dt =cicjuiuj dt = cicj uiuj dt. (2.3.5)
В этом выражении в силу ортонормированности базисной системы отличны от нуля только члены с номерами i = j. Отсюда:
Es =s2(t) dt =ci2, (2.3.6)
т.е. при корректном разложении сигнала в обобщенный ряд Фурье энергия сигнала не изменяется и равна сумме энергии всех составляющих ряда. Это соотношение называют равенством Парсеваля.
2.4. Функции корреляции сигналов [1, 25].
Функции корреляции сигналов применяются для интегральных количественных оценок формы сигналов и степени их сходства друг с другом.
Автокорреляционные функции (АКФ) сигналов (correlation function, CF). Применительно к детерминированным сигналам с конечной энергией АКФ является количественной интегральной характеристикой формы сигнала и представляет собой интеграл от двух копий сигнала s(t), сдвинутых относительно друг друга на время t:
Bs(t) =  s(t) s(t+t) dt. (2.4.1)
s(t) s(t+t) dt. (2.4.1)
Как следует из этого выражения, АКФ является скалярным произведением сигнала и его копии в функциональной зависимости от переменной величины значения сдвига t. Соответственно, АКФ имеет физическую размерность энергии, а при t = 0 значение АКФ непосредственно равно энергии сигнала и является максимально возможным (косинус угла взаимодействия сигнала с самим собой равен 1):
Bs(0) =s(t)2 dt = Es.
Функция АКФ является непрерывной и четной. В последнем нетрудно убедиться заменой переменной t = t-t в выражении (2.4.1):
Bs(t) = s(t) s(t-t) dt = s(t-t) s(t) dt = Bs(-t).
С учетом четности, вычисление АКФ обычно производится только для положительных значений t. Знак +t в выражении (2.4.1) означает, что при увеличении значений t от нуля копия сигнала s(t+t) сдвигается влево по оси t. На практике сигналы обычно также задаются на интервале положительных значений аргументов от 0-Т, что дает возможность продления интервала нулевыми значениями, если это необходимо для математических операций. В этих границах вычислений более удобным является сдвиг копии сигнала влево по оси аргументов, т.е. применение в выражении (2.4.1) функции s(t-t):
Bs(t) = s(t) s(t-t) dt. (2.4.1′)
По мере увеличения значения величины сдвига t для финитных сигналов временное перекрытие сигнала с его копией уменьшается, а, соответственно, косинус угла взаимодействия и скалярное произведение в целом стремятся к нулю:
 = 0.
= 0.
Пример. На интервале (0,Т) задан прямоугольный импульс с амплитудным значением, равным А. Вычислить автокорреляционную функцию импульса.
 При сдвиге копии импульса по оси t вправо, при 0≤t≤T сигналы перекрываются на интервале от t до Т. Скалярное произведение:
При сдвиге копии импульса по оси t вправо, при 0≤t≤T сигналы перекрываются на интервале от t до Т. Скалярное произведение:
Bs(t) = A2 dt = A2(T-t).
A2 dt = A2(T-t).
 При сдвиге копии импульса влево, при -T≤t<0 сигналы перекрываются на интервале от 0 до Т-t. Скалярное произведение:
При сдвиге копии импульса влево, при -T≤t<0 сигналы перекрываются на интервале от 0 до Т-t. Скалярное произведение:
Bs(t) = A2 dt = A2(T+t).
A2 dt = A2(T+t).
При |t| > T сигнал и его копия не имеют точек пересечения и скалярное произведение сигналов равно нулю (сигнал и его сдвинутая копия становятся ортогональными).
 Обобщая вычисления, можем записать:
Обобщая вычисления, можем записать:
Bs(t) =  .
.
В случае сигналов с бесконечной энергией и периодических сигналов АКФ вычисляется по определенному интервалу (периоду) Т, с усреднением скалярного произведения и его сдвинутой копии в пределах этого интервала (одного периода для периодических):
Bs(t) = (1/Т) s(t) s(t-t) dt. (2.4.2)
s(t) s(t-t) dt. (2.4.2)
При t=0 значение АКФ в этом случае равно не энергии, а средней мощности сигналов в пределах интервала Т. АКФ периодических сигналов при этом также является периодической функцией с тем же периодом Т. Так, для сигнала s(t) = A cos(w0t+j0) при T=2p/w0 имеем:
Bs(t) = A cos(w0t+j0) A cos(w0(t-t)+j0) = (A2/2) cos(w0t).
A cos(w0t+j0) A cos(w0(t-t)+j0) = (A2/2) cos(w0t).
Отметим, что полученный результат не зависит от начальной фазы гармонического сигнала, что характерно для любых периодических сигналов и является одним из свойств КФ.
Взаимная корреляционная функция (ВКФ) сигналов (cross-correlation function, CCF) показывает степень сходства сдвинутых экземпляров двух разных сигналов и их взаимное расположение по координате (независимой переменной), для чего используется та же формула (2.4.1), что и для АКФ, но под интегралом стоит произведение двух разных сигналов, один из которых сдвинут на время t:
B12(t) = s1(t) s2(t+t) dt. (2.4.3)
При замене переменной t = t-t в формуле (2.4.3), получаем:
B12(t) =s1(t-t) s2(t) dt = s2(t) s1(t-t) dt = B21(-t)

Рис. 2.4.1. Сигналы и ВКФ.
Вместе с этой лекцией читают “Наследственность и методы ее изучения”.
Отсюда следует, что для ВКФ не выполняется условие четности, а значения ВКФ не обязаны иметь максимум при t = 0. Это можно наглядно видеть на рис. 2.4.1, где заданы два одинаковых сигнала с центрами на точках 0.5 и 1.5. Вычисление по формуле (2.4.3) с постепенным увеличением значений t означает последовательные сдвиги сигнала s2(t) влево по оси времени (для каждого значения s1(t) для подынтегрального умножения берутся значения s2(t+t)).
При t=0 сигналы ортогональны и значение B12(t)=0. Максимум В12(t) будет наблюдаться при сдвиге сигнала s2(t) влево на значение t=1, при котором происходит полное совмещение сигналов s1(t) и s2(t+t). При вычислении значений B21(-t) аналогичный процесс выполняется последовательным сдвигом сигнала s1(t) вправо по временной оси с постепенным увеличением отрицательных значений t, а соответственно значения B21(-t) являются зеркальным (относительно оси t=0) отображением значений B12(t), и наоборот. На рис. 2.4.2 это можно видеть наглядно.

Рис. 2.4.2. Сигналы и ВКФ.
Таким образом, для вычисления полной формы ВКФ числовая ось t должна включать отрицательные значения, а изменение знака t в формуле (2.4.3) равносильно перестановке сигналов.
Для периодических сигналов понятие ВКФ обычно не применяется, за исключением сигналов с одинаковым периодом, например, сигналов входа и выхода систем при изучении характеристик систем.
Энергетические характеристики сигналов
Основными
энергетическими характеристиками
сигнала s(t) являются егомощностьиэнергия.
Мгновенная
мощность p(t) для вещественного
сигнала определяется как
![]()
а
для комплексного как
![]()
где
знак ” * ” означает комплексно
сопряженную функцию.
Если
s(t) – напряжение или ток, тоp(t)
есть мгновенная мощность, выделяемая
на сопротивлении 1 Ом.
Энергия
сигнала на интервале ( t2 ,t1
) определяется как интеграл от
мгновенной мощности

Отношение

имеет
смысл средней на интервале ( t2 ,t1 ) мощности.
Для
неограниченных по времени периодических
сигналов определяют среднюю за период
мощность

Ортогональные
сигналы.
Два сигнала
называются ортогональными (orthogonal), если
имеют нулевое скалярное произведение
u(t),
v(t)
=![]() u(t)v(t)
u(t)v(t)
dt = 0.
Соответственно,
два таких сигнала в своем функциональном
пространстве являются взаимно
перпендикулярными (угол между сигналами
равен
= 90о),
полностью независимыми друг от друга
(некоррелированными, r = cos ,
и имеют нулевую энергию взаимодействия
(Euv
= 0).

Рис.
2.3.1. Ортогональные сигналы.
На рисунке 2.3.1
приведены примеры взаимно ортогональных
сигналов. Нулевое скалярное произведение
двух левых сигналов обеспечивается их
формой (равна нулю сумма положительных
и отрицательных значений произведения
сигналов), а двух правых – взаимным
расположением (ненулевые значения
сигналов не имеют общих координат).
Попутно заметим,
что энергия и мощность суммы ортогональных
сигналов обладают свойством аддитивности,
т.к. имеют нулевое значение скалярного
произведения и, соответственно, нулевую
энергию взаимодействия.
Норма
сигналов
в линейном пространстве является
аналогом длины векторов, и обозначается
индексом ||s(t)|| – норма
(norm). В математике существуют различные
формы норм. При анализе сигналов обычно
используются квадратичные нормы
||s(t)|| = .
.
(2.1.2)
Для дискретных
сигналов:
||s(n)|| =![]() .
.
(2.1.2′)
Для комплексных
сигналов
||s(t)|| = ,
,
(2.1.2”)
где s*(t) – величины,
комплексно сопряженные с s(t).
Линейное пространство
сигналов L является нормированным, если
каждому сигналу пространства s(t)
однозначно сопоставлена его числовая
норма ||s(t)||, и выполняются следующие
аксиомы:
-
Норма неотрицательна
(||s(t)|| ≥ 0) и равна нулю тогда и только
тогда, когда сигнал равен нулю (||s(t)|| =
,
при s(t) = ). -
Для любого числа
b должно быть справедливо равенство
||bs(t)|| = |b|
||s(t)||. -
Если v(t) и u(t) –
сигналы из пространства L, то должно
выполняться неравенство треугольника
||v(t)+u(t)||
||v(t)|| + ||u(t)||.
Пример норм для
двумерных цифровых сигналов приведен
на рис. 2.1.2.

Энергетические спектры сигналов [1].
Скалярное
произведение сигналов.Энергия
суммы двух произвольных сигналов u(t) и
v(t) определяется выражением
E
=![]() [u(t)+v(t)]2
[u(t)+v(t)]2
dt = Eu
+ Ev
+ 2![]() u(t)v(t)
u(t)v(t)
dt. (7.2.1)
Как
следует из этого выражения, энергии
сигналов, в отличие от самих сигналов,
в общем случае не обладают свойством
аддитивности. Энергия суммарного сигнала
u(t)+v(t), кроме суммы энергий составляющих
сигналов, содержит в себе и так называемую
энергию взаимодействия сигналов или
взаимную энергию
Euv= 2![]() u(t)v(t)
u(t)v(t)
dt. (7.2.2)
Интеграл
выражения (7.2.2) для двух вещественных
сигналов является фундаментальной
характеристикой, пропорциональной
взаимной энергии сигналов. Его называют
скалярным произведениемсигналов
Пuv= (u(t),v(t)) =![]() u(t)v(t)
u(t)v(t)
dt = ||u||||v|| cos, (7.2.3)
Скалярное
произведение обладает следующими
свойствами
-
(u,v)
0; -
(u,v) = (v,u);
-
(au,v) = a(u,v), где а –
вещественное число; -
(u+v, a) = (u,a) + (v,a).
Линейное
пространство сигналов с таким скалярным
произведением называется гильбертовым
пространствомН. С учетом того, что
cos1, в гильбертовом пространстве справедливо
неравенство Коши-Буняковского
|Пuv|||u||||v||. (7.2.4)
Для
комплексного гильбертова пространства
скалярное произведение также представляет
собой вещественное число и вычисляется
по формуле
Пuv=![]() u(t)v*(t)
u(t)v*(t)
dt![]() u*(t)v(t)
u*(t)v(t)
dt. (7.2.3′)
Из
выражения (7.2.3) следует, что косинус угла
между сигналами
cos
= Пuv/(||u||||v||). (7.2.5)
При
полной тождественности сигналов
(равенстве амплитуд и временных координат)
имеем = 0, cos= 1, и скалярное произведение становится
равным энергии сигналов:
Пuv=![]() u(t)2dt
u(t)2dt![]() v(t)2dt||u||2||v||2.
v(t)2dt||u||2||v||2.
Дискретные
сигналы обычно рассматриваются в
пространстве Евклида(обозначение
пространства – R2). Скалярное
произведение двух сигналов в пространстве
Евклида:
Пuv= (uk,vk)
=![]() ukvk,
ukvk,
где
n – размерность пространства.
Взаимный
энергетический спектр.Из очевидной
однозначности энергии взаимодействия
сигналов независимо от формы их
математического представления (в
динамической и частотной модели) следует
выражение для скалярного произведения
произвольных вещественных сигналов
u(t) и v(t) через спектральные плотности
сигналов U() и V()
в комплексном гильбертовом пространстве:
Пuv= (1/2)![]() U()V*()
U()V*()
d(1/2)![]() U*()V()
U*()V()
d. (7.2.6)
Функции
Wuv()
= U()V*(),
Wvu()
= U*()V(),
Wuv()
= Wvu*(),
(7.2.7)
для
которых справедливо выражение (7.2.6),
называется взаимными энергетическими
спектрамивещественных сигналов, и
являются функциями распределения
плотности энергии взаимодействия
сигналов (мощности взаимодействия) по
частоте.
В
общем случае, за исключением спектров
четных функций, взаимные энергетические
спектры также являются комплексными
функциями:
U()
= Au()
+ j Bu(),
V() = Av()
+ j Bv().
Wuv
= AuAv+BuBv+j
(BuAv
– AuBv)
= Re Wuv(w)
+ j Im Wuv().
(7.2.7′)
С
учетом четности реальной части и
нечетности мнимой части энергетических
спектров, интеграл мнимой части выражения
(7.2.7′) равен нулю, а, следовательно,
скалярное произведение сигналов всегда
является вещественным и неотрицательным,
как и энергия сигналов:
Пuv= (1/2)![]() Wuv()
Wuv()
d(1/)![]() Re
Re
Wuv()
d.2.8)

Рис.
7.2.1. Форма и энергетические спектры
сигналов.
На
рис. 7.2.1 приведена форма двух одинаковых
сдвинутых во времени и частично
перекрывающихся лапласовских импульсов
u(t) и v(t), а также суммарный импульс
z(t)=u(t)+v(t). Плотности энергии сигналов
W(f) приведены в относительных единицах
плотности энергии суммарного сигнала
Wz(f) на
нулевой частоте.
Как
видно из графиков, плотности энергии
сигналов являются вещественными
неотрицательными функциями и содержат
только реальные части. В отличие от них,
плотность взаимной энергии сигналов
является комплексной функцией, при этом
модуль плотности по своим значениям на
шкале частот соизмерим со средними
значениями плотности энергии сигналов
на этих частотах и не зависит от их
взаимного расположения на временной
оси. Для сигналов, одинаковых по форме,
модуль взаимной плотности равен значениям
плотности энергии сигналов.
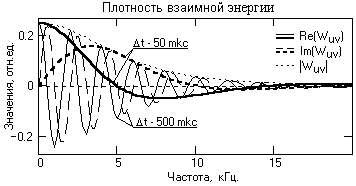
Рис.
7.2.2. Взаимные энергетические спектры
сигналов.
На
рис. 7.2.2 приведены плотности взаимной
энергии тех же сигналов при разной
величине временного сдвига t
между сигналами. Однако при постоянном
значении модуля взаимной энергии
сигналов действительная и мнимая функции
спектра мощности существенно изменяются
при изменении сдвига между сигналами.
При незначительной величине временного
перекрытия сигналов частота осцилляций
реальной и мнимой части плотности
взаимной энергии достаточно велика, а
относительный коэффициент затухания
колебаний (уменьшение амплитудных
значений от периода к периоду) достаточно
мал. Соответственно, при вычислении
скалярного произведения по формуле
(7.2.8) положительные амплитудные значения
осцилляций Re(Wuv)
практически полностью компенсируются
отрицательными значениями и результирующий
интеграл, а равно и энергия взаимодействия
сигналов (удвоенное значение скалярного
произведения), близка к нулевой (стремится
к нулю по мере увеличения сдвига между
сигналами).
При
увеличении степени взаимного перекрытия
сигналов частота осцилляций плотности
взаимной энергии уменьшается (t
= 50 mkc на рис. 7.2.2) и основным по энергии
реальной части спектра становится
центральный низкочастотный пик, площадь
которого не компенсируется площадью
последующей отрицательной полуволны
осцилляции. Соответственно, возрастает
и энергия взаимодействия сигналов. При
полном перекрытии сигналов (при нулевом
фазовом угле между сигналами) осцилляции
исчезают, и энергия взаимодействия
сигналов максимальна.


3.
Специальные математические функции
для описания сигналов (rect-функция,
sign-функция,
sinc-функция,
функция Хэвисайда (включения), функция
Дирака (дельта-функция)).




4.
Помехи радиоприёму. Классификация
помех.
Помехи
Помехами
обычно называют посторонние электрические
возмущения, накладывающиеся на
передаваемый сигнал и затрудняющие его
прием. При большой интенсивности помех
прием становится практически невозможным.
Классификация
помех:
а)
помехи от соседних радиопередатчиков
(станций);
б)
помехи от промышленных установок;
в)
атмосферные помехи (грозы, осадки);
г)
помехи, обусловленные прохождением
электромагнитных волн через слои
атмосферы: тропосферу, ионосферу;
д)
тепловые и дробовые шумы в элементах
радиоцепей, обусловленные тепловым
движением электронов.
Математически
сигнал на входе приемника можно
представить либо в виде суммы передаваемого
сигнала и помехи, и тогда помеху называют
аддитивной, либо простошумом,
либо в виде произведения передаваемого
сигнала и помехи, и тогда такую помеху
называютмультипликативной. Эта
помеха приводит к значительным изменениям
интенсивности сигнала на входе приемника
и объясняет такие явления какзамирания.
Наличие
помех затрудняет прием сигналов при
большой интенсивности помех, распознавание
сигнала может стать практически
невозможным. Способность системы
противостоять мешающему воздействию
помехи носит название помехоустойчивости.
Внешние
естественные активные помехи представляют
собой шумы, возникающие в результате
радиоизлучения земной поверхности и
космических объектов, работы других
радиоэлектронных средств. Комплекс
мероприятий, направленных на уменьшение
влияния взаимных помех РЭС, называется
электомагнитной совместимостью. Этот
комплекс включает в себя как технические
меры совершенствования радиоаппаратуры,
выбор формы сигнала и способа его
обработки, так и организационные меры:
регламентация частоты, разнесение РЭС
в пространстве, нормирование уровня
внеполосных и побочных излучений и др.
5.
Разложение произвольного сигнала по
заданной системе ортогональных функций.
Условия
ортогональности системы действительных
функций.
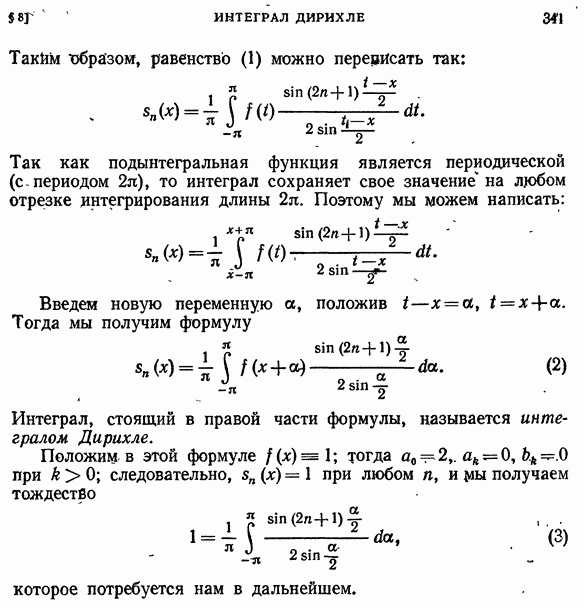
Интеграл
Дирихле.
Функции
φ(x)
и Ψ(x)
называются ортогональными,если интеграл
от их произведения равен нулю.

Рассмотрим
ряд функций:
![]() .
.
Система функций![]() называется
называется
ортогональной, если на отрезке от “а”
до “b” все функции попарно ортогональны.

Рассмотрим
промежуток где n=m:

Если
система функций
![]() при
при
n=mимеет коэффициент![]() ,
,
то эта функция является ортонормальной.
Если ортогональная система функций не
ортонормальна, то ее можно получить,
произведя замену:
 .
.
Рассмотрим
систему ортогональных функций
![]() и
и
некоторой произвольной функции![]() .
.
Разложим функцию![]() в
в
ряд по системе ортогональных функций,
то есть предположим, что существует
разложение вида:

Определим
коэффициенты ряда. Для этого умножим
обе части равенства [1] на
![]() и
и
проинтегрируем. В результате получим:

Так
как система функций ортогональна и
ортонормальна, то получили равенство
![]() .
.
Выразим Сn
из уравнения:

Ряд
[1] называется обобщенным рядом Фурье,
![]() –
–
коэффициентом ряда Фурье. Ряд [1] существует
тогда и только тогда, когда![]() является
является
периодической функцией, а система
функций![]() –
–
является равномерно сходящейся.


7.
Ряд
Фурье. Разложение в ряд Фурье. Комплексная
и тригонометрическая формы ряда Фурье.
Понятие
частотного спектра.



Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В современной теории радиотехнических сигналов широкое применение находят геометрические представления сигналов, использующие такие понятия как пространство, вектор, расстояние, проекция и т.д. Поэтому, для уяснения сущности геометрического представления необходимо познакомиться с этими понятиями.
Как уже подчеркивалось выше, для передачи сообщений в РТИС используется множество сигналов ![]() , образующее ансамбль сигналов. Это множество может быть непрерывным (континуальным), либо дискретным (счетным). В свою очередь дискретные множества могут быть конечными, либо бесконечными. При геометрическом представлении говорят, что множество
, образующее ансамбль сигналов. Это множество может быть непрерывным (континуальным), либо дискретным (счетным). В свою очередь дискретные множества могут быть конечными, либо бесконечными. При геометрическом представлении говорят, что множество ![]() образует пространство сигналов.
образует пространство сигналов.
Любое пространство предполагает наличие системы координат. Пространство, в котором обитает человек, характеризуется декартовой системой координат, характеризующейся наличием трех взаимно перпендикулярных координатных осей. Тогда с любой точкой пространства будут связаны три вещественных числа, которые можно рассматривать как координаты точки в пространстве.
Рассмотрим как можно распространить указанные понятия на радиотехнические сигналы. В качестве примера приведем представление произвольного сигнала ![]() длительностью
длительностью ![]() в виде суммы двух неперекрывающихся прямоугольных импульсов с высотой соответственно
в виде суммы двух неперекрывающихся прямоугольных импульсов с высотой соответственно ![]() и
и ![]() и длительностью
и длительностью ![]() (рис 1.8).
(рис 1.8).
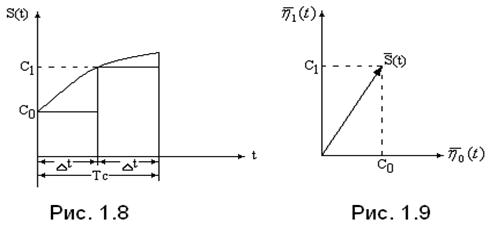
Т.к. импульсы не перекрываются во времени (проекция одного импульса на другой по оси времени равна нулю), то совокупность двух импульсов, отображающих сигнал ![]() , можно представить точкой в двумерной системе координат, образованной взаимноперпендикулярными векторами
, можно представить точкой в двумерной системе координат, образованной взаимноперпендикулярными векторами ![]() и
и ![]() (рис.1.9). Отрезок прямой, проведенный из начала системы координат в точку с координатами
(рис.1.9). Отрезок прямой, проведенный из начала системы координат в точку с координатами ![]() и
и ![]() представляет собой вектор
представляет собой вектор ![]() сигнала
сигнала ![]() при его данном динамическом представлении. Тогда математически его можно записать в виде
при его данном динамическом представлении. Тогда математически его можно записать в виде
![]() .
.
Если представить ![]() тремя импульсами, то сигнал
тремя импульсами, то сигнал ![]() будет отображаться вектором
будет отображаться вектором ![]() в трехмерном пространстве, четырьмя импульсами-вектором в четырехмерном пространстве, n импульсами-вектором в n-мерном пространстве. Таким образом, в общем случае сигнал
в трехмерном пространстве, четырьмя импульсами-вектором в четырехмерном пространстве, n импульсами-вектором в n-мерном пространстве. Таким образом, в общем случае сигнал ![]() отображается вектором
отображается вектором ![]() в абстрактном n-мерном пространстве. При этом пространство может быть бесконечномерным.
в абстрактном n-мерном пространстве. При этом пространство может быть бесконечномерным.
Отметим, что совокупность векторов ![]() образуют координатный базис пространства. Очевидно, с изменением значений сигнала
образуют координатный базис пространства. Очевидно, с изменением значений сигнала ![]() во времени длина вектора
во времени длина вектора ![]() и его положение в пространстве будет также меняться.
и его положение в пространстве будет также меняться.
Для дальнейшего рассмотрения геометрического представления зафиксируем момент времени ![]() , т.е. сделаем как бы фотографический снимок пространства. Это позволит на время абстрагироваться от динамики изменения сигнала и рассмотреть свойства пространства, используемого для геометрического представления. Кроме того, при характеристике пространства будем использовать его n-мерную модель, а для графических иллюстраций – двумерное пространство.
, т.е. сделаем как бы фотографический снимок пространства. Это позволит на время абстрагироваться от динамики изменения сигнала и рассмотреть свойства пространства, используемого для геометрического представления. Кроме того, при характеристике пространства будем использовать его n-мерную модель, а для графических иллюстраций – двумерное пространство.
Исходя из этих предположений, вектор сигнала ![]() можно записать следующим образом
можно записать следующим образом
 . (1.20)
. (1.20)
В теории радиотехнических сигналов пространство для геометрического представления должно быть линейным.
Линейное пространство обладает следующими основными свойствами:
– если векторы ![]() и
и ![]() принадлежат пространству
принадлежат пространству ![]() , то и вектор
, то и вектор ![]() также принадлежит этому пространству, причем (рис.1.10)
также принадлежит этому пространству, причем (рис.1.10)
![]() ; (1.21)
; (1.21)
Рис. 1.10
– определена операция умножения вектора ![]() на любое вещественное число
на любое вещественное число ![]() , причем
, причем
![]() ; (1.22)
; (1.22)
– пространство содержит нулевой элемент ![]() , причем
, причем
![]() . (1.23)
. (1.23)
Поскольку при анализе сигналов, как правило, пользуются количественными характеристиками, пространство геометрического представления должно позволять определять длину векторов для их сравнения. Длину вектора называют нормой ![]() , а пространство, в котором определена норма – нормированным пространством. Основными свойствами линейного нормированного пространства являются:
, а пространство, в котором определена норма – нормированным пространством. Основными свойствами линейного нормированного пространства являются:
– для любого вещественного числа ![]() норма
норма
![]() ; (1.24)
; (1.24)
– если ![]() и
и ![]() – два вектора, принадлежащие линейному нормированному пространству, то:
– два вектора, принадлежащие линейному нормированному пространству, то:
![]() . (1.25)
. (1.25)
Свойство (1.25) отображает так называемое правило треугольника, известное из курса геометрии, в справедливости которого можно убедиться из рис.1.10.

В качестве нормы в теории радиотехнических сигналов используют величину
 . (1.26)
. (1.26)
Очевидно квадрат нормы
 , представляет собой энергию сигнала.
, представляет собой энергию сигнала.
Введение понятия нормы позволяет определять длину векторов, представляющих сигналы в линейном нормированном пространстве, но не позволяет определять расстояние между векторами. Для того чтобы это стало возможным необходимо ввести понятие расстояния между векторами ![]() и
и ![]() , т.е. величину
, т.е. величину ![]() , называемую метрикой. Тогда линейное нормированное пространство становится метрическим.
, называемую метрикой. Тогда линейное нормированное пространство становится метрическим.
Метрика пространства должна удовлетворять условиям:
- расстояние между одинаковыми векторами равно нулю, т.е.
![]() ; (1.27)
; (1.27)
![]() (1.28)
(1.28)
- должно выполняться правило треугольника, т.е.
![]() . (1.29)
. (1.29)
В теории радиотехнических сигналов в качестве метрики используют норму разности двух сигналов
![]() . (1.30)
. (1.30)
Нетрудно убедиться, что величина (1.30) удовлетворяет всем аксиомам метрического пространства.
И, наконец, взаимное расположение двух векторов пространстве оценивается величиной угла ![]() между ними, который определяется выражением
между ними, который определяется выражением
 , (1.31)
, (1.31)
где числитель представляет собой скалярное произведение векторов.
Таким образом, для геометрического представления сигналов в радиотехнике используется линейное метрическое нормированное пространство. Если пространство конечномерное (координатный базис содержит конечное число векторов ![]() ), то такое пространство называют Евклидовым. Бесконечномерное пространство называется Гильбертовым пространством.
), то такое пространство называют Евклидовым. Бесконечномерное пространство называется Гильбертовым пространством.
|
|

Макеты страниц
При решении многих теоретических и прикладных задач радиотехники возникают такие вопросы: 1) в каком смысле можно говорить о величине сигнала, утверждая, например, что один сигнал значительно превосходит другой; 2) можно ли объективно оценивать, насколько два неодинаковых сигнала «похожи» друг на друга?
В XX в. был создан функциональный анализ — раздел математики, обобщающий наши интуитивные представления о геометрической структуре пространства. Оказалось, что нден функционального анализа дают возможность создать стройную теорию сигналов, в основе которой лежит концепция сигнала как вектора в специальным образом сконструированном бесконечномерном пространстве.
Линейное пространство сигналов. Пусть  множество сигналов. Причина объединения этихобъектов
множество сигналов. Причина объединения этихобъектов  наличие некоторых свойств, общих для всех элементов множества М.
наличие некоторых свойств, общих для всех элементов множества М.
Пример 1.4, Множество М образовано всевозможными аналоговыми сигналами, отличными от нуля на интервале времени (0,15 мкс) и равными нулю вне этого интервала.
Пример 1.5. Множество М состоит из сигналов вида  — гармонических колебаний, отличающихся своими амплитудами, частотами и начальными фазами.
— гармонических колебаний, отличающихся своими амплитудами, частотами и начальными фазами.
Исследование свойств сигналов, образующих такие множества, становится особенно плодотворным тогда, когда удается выражать одни элементы множества через другие элементы. Принято говорить, что множество сигналов наделено при этом определенной структурой. Выбор той или иной структуры должен быть продиктован физическими соображениями. Так, применительно к электрическим колебаниям известно, что они могут складываться, а гакже умножаться на произвольный масштвбный коэффициент. Это дает возможность в множествах сигналов ввести структуру линейного пространства.
Множество сигналов М образует вещественное линейное пространство, если справедливы следующие аксиомы:
1. Любой сигнал  при любых t принимает лишь вещественные значения.
при любых t принимает лишь вещественные значения.
2. Для любых  существует их сумма
существует их сумма  причем w также содержится в М. Операция суммирования коммутативна:
причем w также содержится в М. Операция суммирования коммутативна:  и ассоциативна:
и ассоциативна:

3. Для любого сигнала  и любого вещественного числа а определен сигнал
и любого вещественного числа а определен сигнал  .
.
4. Множество М содержит особый нулевой элемент  , такой, что
, такой, что  для всех
для всех  .
.
Если математические модели сигналов принимают комплексные значения, то, допуская в аксиоме 3 умножение на комплексное число, приходим к понятию комплексного линейного пространства.
Введение структуры линейного пространства является первым шагом на пути к геометрической трактовке сигналов. Элементы линейных пространств часто называют векторами, подчеркивая аналогию свойств этих объектов и обычных трехмерных векторов.
Ограничения, налагаемые аксиомами линейного пространства, весьма жестки. Далеко не каждое множество сигналов оказывается линейным пространством.
Пример 1.6. Множество М состоит из всевозможных прямоугольных видеоимпульсов напряжения, существующих на интервале времени (0, 20 мкс), причем амплитуды импульсов не превышают 10 В.
Сложив, например, импульсы с амплитудами 6 и 8 В, получаем нмпульс, не принадлежащий множеству М. Поэтому М не есть линейное пространство.
Понятие координатного базиса.
Как и в обычном трехмерном пространстве, в линейном пространстве сигналов можно выделить специальное подмножество, играющее роль координатных осей.
Говорят, что совокупность векторов  , принадлежащих М, является линейно независимои, если равенство
, принадлежащих М, является линейно независимои, если равенство

возможно лишь в случае одновременного обращения в нуль всех числовых коэффициентов а.
Система линейно независимых векторов образует координатной базис в линейном пространстве. Если дано разложение некоторого сигнала  в виде
в виде

то числа  являются проекциями сигнала s(t) относительно выбранного базиса.
являются проекциями сигнала s(t) относительно выбранного базиса.
В задачах теории сигналов число базисных векторов, как правило, неограниченно велико. Такие линейные пространства называют бесконечномерными. Естественно, что теория этих пространств не может быть вложена в формальную схему линейной алгебры, где число базисных векторов всегда конечно.
Пример 1.7. Линейное пространство образовано сигналами, которые описываются многочленами неограниченно высокого порядка:

(такие функции называются аналитическими).
Координатным базисом в этом пространстве служит система одночленов 
Нормированное линейное пространство. Энергия сигнала.
Для того чтобы продолжить и углубить геометрическую трактовку теории сигналов, необходимо ввести новое понятие, которое по своему смыслу соответствует длине вектора. Это позволит не только придать точный смысл высказыванию вида «первый сигнал больше второго», но и указвть, на сколько он больше.
Длину вектора в математике называют его нормой. Линейное пространство сигналов L является нормированным, если каждому вектору  однозначно сопоставлено число
однозначно сопоставлено число  — норма этого вектора, причем выполняются следующие аксиомы нормированного пространства:
— норма этого вектора, причем выполняются следующие аксиомы нормированного пространства:
1. Норма неотрицательна, т. е.  Норма
Норма  тогда и только тогда, если
тогда и только тогда, если 
2. Для любого числа а справедливо равенство 
3. Если  и
и  — два вектора из L, то выполняется неравенство треугольника:
— два вектора из L, то выполняется неравенство треугольника: 
– Можно предложить разные способы введения нормы сигналов. В радиотехнике чаще всего полагают, что вещественные аналоговые сигналы имеют норму

(из двух возможных значений корня выбирается положительное). Для комплексных сигналов норма

где  — символ комплексно-сопряженной величины.
— символ комплексно-сопряженной величины.
Квадрат нормы носит название энергии сигнала

Именно такая энергия выделяется в резисторе с сопротивлением 1 Ом, если на его зажимах существует напряжение s(t).
Пример 1.8. Сигнал s(t) представляет собой треугольный импульс напряжения с амплитудой U и длительностью  Вычислить энергию и норму такого сигнала.
Вычислить энергию и норму такого сигнала.
На интервале времени  сигнал описывается функцией
сигнал описывается функцией

Энергия сигнала

Норма сигнала

Пример 1.9. Вычислить энергию радиоимпульса с прямоугольной формой огибающей. Импульс существует на интервале времени  и описывается функцией
и описывается функцией  соответствии с формулой (1.16)
соответствии с формулой (1.16)

Выполнив интегрирование, получаем 

Если внутри импульса содержится много периодов высокочастотного заполнения, так что  , то
, то  независимо от выбора параметров
независимо от выбора параметров 
Определять норму сигнала с помощью формулы (1.15) целесообразно по следующим причинам:
1. В радиотехнике о величине сигнала часто судят, исходя из суммарного энергетическог о эффекта, например количества теплоты, выделяемой в резисторе.
2. Энергетическая норма оказывается «нечувствительной» к изменениям формы сигнала, может быть, и значительным, но происходящим на коротких отрезках времени.
Линейное нормированное пространство с конечной величиной нормы вида (1-15) носит название пространства функций с интегрируемым квадратом и кратко обозначается  .
.
Метрическое пространство.
Теперь необходима ввести еще одно фундаментальное понятие, которое обобщало бы наше обычное представление о расстоянии между точками в пространстве.
Говорят, что линейное пространство L становится метрическим пространством, если каждой паре элементов  ,
,  сопоставлено неотрицательное число
сопоставлено неотрицательное число  называемое метрикой, или расстоянием между этими элементами. Метрика, независимо от способа ее определения, должна подчиняться аксиомам метрического пространства:
называемое метрикой, или расстоянием между этими элементами. Метрика, независимо от способа ее определения, должна подчиняться аксиомам метрического пространства:
1.  (рефлексивность метрики).
(рефлексивность метрики).
2.  при любых
при любых  .
.
3. Каков бы ни был элемент  всегда
всегда 
Обычно метрику определяют как норму разности двух сигналов:

Норму, в свою очередь, можно понимать как расстояние между выбранным элементом пространства и нулевым элементом  Зная метрику, можно судить, например, о том, насколько хорошо один из сигналов аппроксимирует другой.
Зная метрику, можно судить, например, о том, насколько хорошо один из сигналов аппроксимирует другой.
Пример 1.10. Сигналу  представляет собой отрезок синусоиды, обращающейся в нуль на, концах отрезка
представляет собой отрезок синусоиды, обращающейся в нуль на, концах отрезка  . Высота импульса V известна. Выбрать амтитуду А прямоугольного импульса
. Высота импульса V известна. Выбрать амтитуду А прямоугольного импульса  том же длительности так, чтобы расстояние между этими двумя сигналами было минимальным.
том же длительности так, чтобы расстояние между этими двумя сигналами было минимальным.
Сигнал  представляется формулой
представляется формулой

Квадрат расстояния между сигналами

Проведя интегрирование, имеем

Исследуя это выражение на экстремум, убеждаемся, что минимум расстояния будет достигнут, если  При этом
При этом

Заметим, что энергия синусоидального импульса

его норма 
Итак, при выбранной метрике минимально достижимое расстояние между рассматриваемыми сигналами составляет 44% от нормы синусоидального импульса.
Оглавление
- Предисловие ко второму изданию
- Введение
- 1. Радиотехнические сигналы
- 1.1. Классификация радиотехнических сигналов
- 1.2. Динамическое представление сигналов
- 1.3. Геометрические методы в теории сигналов
- 1.4. Теория ортогональных сигналов
- Результаты
- Глава 2. Спектральные представления сигналов
- 2.1. Периодические сигналы и ряды Фурье
- 2.2. Спектральный анализ непериодических сигналов. Преобразование Фурье
- 2.3. Основные свойства преобразования Фурье
- 2.4. Спектральные плотности неинтегрируемых сигналов
- 2.5. Преобразование Лапласа
- Результаты
- Глава 3. Энергетические спектры сигналов. Принципы корреляционного анализа
- 3.1. Взаимная спектральная плотность сигналов. Энергетический спектр
- 3.2. Корреляционный анализ сигналов
- 3.3. Автокорреляционная функция дискретного сигнала
- 3.4. Взаимокорреляционная функция двух сигналов
- Результаты
- Глава 4. Модулированные сигналы
- 4.1. Сигналы с амплитудной модуляцией
- 4.2. Сигналы с угловой модуляцией
- 4.3. Сигналы с внутриимпульсной частотной модуляцией
- Результаты
- Глава 5. Сигналы с ограниченным спектром
- 5.1. Некоторые математические модели сигналов с ограниченным спектром
- 5.2. Теорема Котельникова
- 5.3. Узкополосные сигналы
- 5.4. Аналитический сигнал и преобразование Гильберта
- Результаты
- Глава 6. Основы теории случайных сигналов
- 6.1. Случайные величины и их характеристики
- 6.2. Статистические характеристики систем случайных величин
- 6.3. Случайные процессы
- Результаты
- Глава 7. Корреляционная теория случайных процессов
- 7.1. Спектральные представления стационарных случайных процессов
- 7.2. Дифференцирование и интегрирование случайных процессов
- § 7.3. Узкополосные случайные процессы
- Результаты
- 2. Радиотехнические цепи, устройства и системы
- 8.1. Физические системы и их математические модели
- 8.2. Импульсные, переходные и частотные характеристики линейных стационарных систем
- 8.3. Линейные динамические системы
- 8.4. Спектральный метод
- 8.5. Операторный метод
- Результаты
- Глава 9. Воздействие детерминированных сигналов на частотно-избирательные системы
- 9.1. Некоторые модели частотно-избирательных цепей
- 9.2. Частотно-избирательные цепи при иирокополосных входных воздействиях
- 9.3. Частотно-избирательные цепи при узкополосных входных воздействиях
- Результаты
- Глава 10. Воздействие случайных сигналов на линейные стационарные цепи
- 10.1. Спектральный метод анализа воздействия случайных сигналов на линейные стационарные цепи
- 10.2. Источники флуктуационных шумов в радиотехнических устройствах
- Результаты
- Глава 11. Преобразования сигналов в нелинейных радиотехнических цепях
- 11.1. Безынерционные нелинейные преобразования
- 11.2. Спектральный состав тока в безынерционном нелинейном элементе при гармоническом внешнем воздействии
- 11.3. Нелинейные резонансные усилители и умножители частоты
- 11.4. Безынерционные нелинейные преобразования суммы нескольких гармонических сигналов
- 11.5. Получение модулированных радиосигналов
- 11.6. Амплитудное, фазовое и частотное детектирование
- 11.7. Воздействие стационарных случайных сигналов на безынерционные нелинейные цепи
- Результаты
- Глава 12. Преобразования сигналов в линейных параметрических цепях
- 12.1. Прохождение сигналов через резистивные параметрические цепи
- 12.2. Энергетические соотношения в параметрических реактивных элементах цепи
- 12.3. Принципы параметрического усиления
- 12.4. Воздействие гармонических сигналов на параметрические системы со случайными характеристиками
- Результаты
- Глава 13. Элементы теории синтеза линейных частотных фильтров
- 13.1. Частотные характеристики четырехполюсников
- 13.2. Фильтры нижних частот
- 13.3. Реализация фильтров
- Результаты
- Глава 14. Активные цепи с обратной связью и автоколебательные системы
- 14.1. Передаточная функция линейной системы с обратной связью
- 14.2. Устойчивость цепей с обратной связью
- 14.3. Активные RС-фильтры
- 14.4. Автогенераторы гармонических колебаний. Режим малого сигнала
- 14.5. Автогенераторы гармонических колебаний. Режим большого сигнала
- Результаты
- Глава 15. Дискретные сигналы. Принципы цифровой фильтрации
- 15.1. Модели дискретных сигналов
- 15.2. Дискретизация периодических сигналов
- 15.3. Теория z-преобразования
- 15.4. Цифровые фильтры
- 15.5. Реализация алгоритмов цифровой фильтрации
- 15.6. Синтез линейных цифровых фильтров
- Результаты
- Глава 16. Некоторые вопросы теории помехоустойчивости радиоприема
- 16.1. Выделение полезного сигнала с помощью линейного частотного фильтра
- 16.2. Оптимальная линейная фильтрация сигналов известной формы
- 16.3. Реализация согласованных фильтров
- 16.4. Оптимальная фильтрация случайных сигналов
- 16.5. Сравнение помехоустойчивости радиосистем с амплитудной и частотной модуляцией
- Результаты
- Заключение
- Приложения
- 1. Функции Уолша и их некоторые свойства
- Список рекомендуемой литературы
