
Определяйте породу
соседской кошки, вид
растения или
малоизвестного животного,
даже если это трубкозуб

Яндекс подскажет название фильма, картины или музея, а ещё распознает знаменитость, будь то Симба
или Мик Джаггер

С поиском по фото
можно найти похожее
кресло или узнать, где
купить кроссовки
с картинки среди товаров
на Яндекс.Маркете
Разбираться в искусстве,
языках и технологиях


Яндекс определит название
музея или напомнит автора
картины

Умная камера покажет
контакты, текст или ссылку по QR-коду, а приложение Яндекс с ней — поможет
оплатить услуги ЖКХ
и получить кэшбэк в Едадиле

Распознавание текста
поможет скопировать
его в документ или
отправить в поиск,
а перевод — понять меню
в азиатском ресторане
Найти что-то похожее
или уникальное


Нашли фото красивой
квартиры в объявлении
о сдаче в аренду — проверьте,
не скопирована ли она
с других сайтов

Ищите вдохновение,
просматривая похожие
фото интерьеров, природы
или детских поделок

Подбирайте картинки
нужного размера — для
аватарки или рабочего
стола
Мы занимаемся закупкой трафика из Adwords (рекламная площадка от Google). Одна из регулярных задач в этой области – создание новых баннеров. Тесты показывают, что баннеры теряют эффективность с течением времени, так как пользователи привыкают к баннеру; меняются сезоны и тренды. Кроме того, у нас есть цель захватить разные ниши аудитории, а узко таргетированные баннеры работают лучше.
В связи с выходом в новые страны остро встал вопрос локализации баннеров. Для каждого баннера необходимо создавать версии на разных языках и с разными валютами. Можно просить это делать дизайнеров, но эта ручная работа добавит дополнительную нагрузку на и без того дефицитный ресурс.
Это выглядит как задача, которую несложно автоматизировать. Для этого достаточно сделать программу, которая будет накладывать на болванку баннера локализованную цену на “ценник” и call to action (фразу типа “купить сейчас”) на кнопку. Если печать текста на картинке реализовать достаточно просто, то определение положения, куда нужно его поставить — не всегда тривиально. Перчинки добавляет то, что кнопка бывает разных цветов, и немного отличается по форме.
Этому и посвящена статья: как найти указанный объект на картинке? Будут разобраны популярные методы; приведены области применения, особенности, плюсы и минусы. Приведенные методы можно применять и для других целей: разработки программ для камер слежения, автоматизации тестирования UI, и подобных. Описанные трудности можно встретить и в других задачах, а использованные приёмы использовать и для других целей. Например, Canny Edge Detector часто используется для предобработки изображений, а количество ключевых точек (keypoints) можно использовать для оценки визуальной “сложности” изображения.
Надеюсь, что описанные решения пополнят ваш арсенал инструментов и трюков для решения проблем.
Код приведён на Python 3.6 (репозиторий); требуется библиотека OpenCV. От читателя ожидается понимание основ линейной алгебры и computer vision.
Фокусироваться будем на нахождении самой кнопки. Про нахождение ценников будем помнить (так как нахождение прямоугольника можно решить и более простыми способами), но опустим, так как решение будет выглядеть аналогичным образом.
Template matching
Первая же мысль, которая приходит в голову — почему бы просто не взять и найти на картинке регион, который наиболее похож на кнопку в терминах разницы цветов пикселей? Это и делает template matching — метод, основанный на нахождении места на изображении, наиболее похожем на шаблон. “Похожесть” изображения задается определенной метрикой. То есть, шаблон “накладывается” на изображение, и считается расхождение между изображением и и шаблоном. Положение шаблона, при котором это расхождение будет минимальным, и будет означать место искомого объекта.
В качестве метрики можно использовать разные варианты, например — сумма квадратов разниц между шаблоном и картинкой (sum of squared differences, SSD), или использовать кросс-корреляцию (cross-correlation, CCORR). Пусть f и g — изображение и шаблон размерами (k, l) и (m, n) соответственно (каналы цвета пока будем игнорировать); i,j — позиция на изображении, к которой мы “приложили” шаблон.


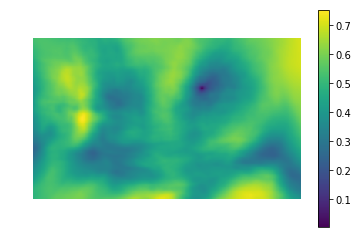
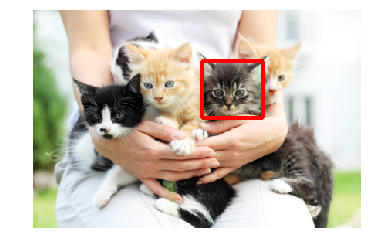
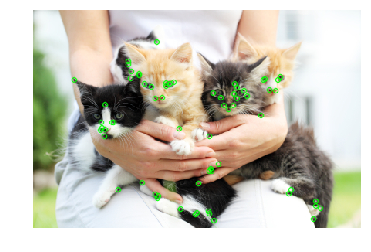
Попробуем применить разницу квадратов для нахождения котёнка

На картинке

(картинка взята с ресурса PETA Caring for Cats).
Левая картинка — значения метрики похожести места на картинке на шаблон (т.е. значения SSD для разных i,j). Темная область — это и есть место, где разница минимальна. Это и есть указатель на место, которое наиболее похоже на шаблон — на правой картинке это место обведено.
Кросс-корреляция на самом деле является сверткой двух изображений. Свёртки можно реализовать быстро, используя быстрое преобразование Фурье. Согласно теореме о свёртке, после преобразования Фурье свёртка превращается в простое поэлементное умножение:

Где  — оператор свёртки. Таким образом мы можем быстро посчитать кросс-корреляцию. Это даёт общую сложность O(kllog(kl)+mnlog(mn)), против O(klmn) при реализации “в лоб”. Квадрат разницы также можно реализовать с помощью свёртки, так как после раскрытия скобок он превратится в разницу между суммой квадратов значений пикселей изображения и кросс-корреляции:
— оператор свёртки. Таким образом мы можем быстро посчитать кросс-корреляцию. Это даёт общую сложность O(kllog(kl)+mnlog(mn)), против O(klmn) при реализации “в лоб”. Квадрат разницы также можно реализовать с помощью свёртки, так как после раскрытия скобок он превратится в разницу между суммой квадратов значений пикселей изображения и кросс-корреляции:



Детали можно посмотреть в этой презентации.
Перейдём к реализации. К счастью, коллеги из нижненовгородского отдела Intel позаботились о нас, создав библиотеку OpenCV, в ней уже реализован поиск шаблона с помощью метода matchTemplate (кстати используется именно реализация через FFT, хотя в документации это нигде не упоминается), использующий разные метрики расхождений:
- CV_TM_SQDIFF — сумма квадратов разниц значений пикселей
- CV_TM_SQDIFF_NORMED — сумма квадрат разниц цветов, отнормированная в диапазон 0..1.
- CV_TM_CCORR — сумма поэлементных произведений шаблона и сегмента картинки
- CV_TM_CCORR_NORMED — сумма поэлементных произведений, отнормированное в диапазон -1..1.
- CV_TM_CCOEFF — кросс-коррелация изображений без среднего
- CV_TM_CCOEFF_NORMED — кросс-корреляция между изображениями без среднего, отнормированная в -1..1 (корреляция Пирсона)
Применим их для поиска котёнка:
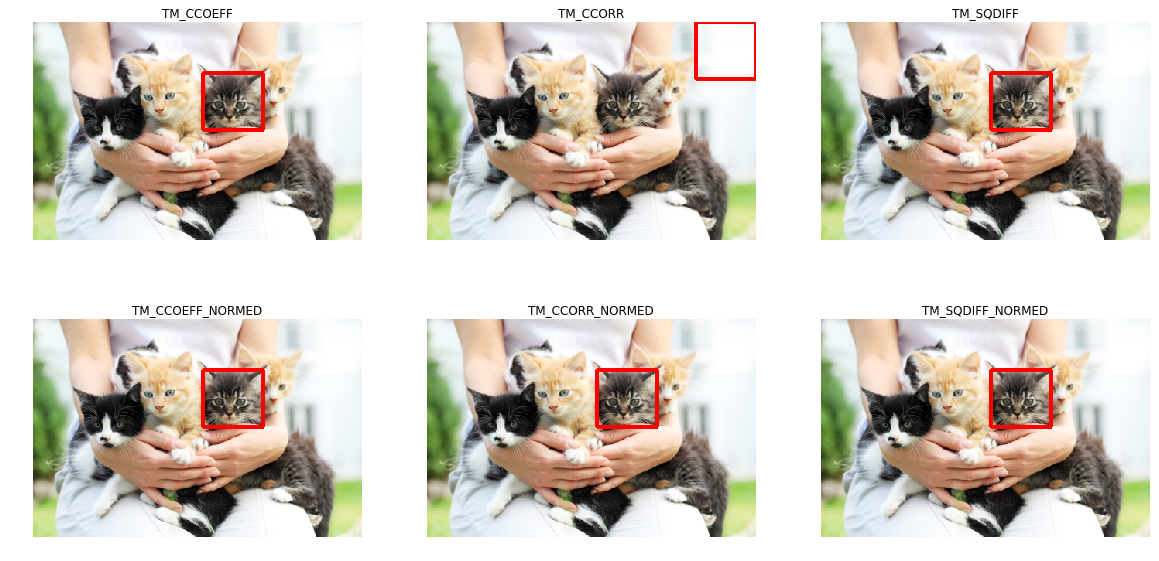
Видно, что только TM_CCORR не справился со своей задачей. Это вполне объяснимо: так как он представляет собой скалярное произведение, то наибольшее значение этой метрики будет при сравнении шаблона с белым прямоугольником.
Можно заметить, что эти метрики требуют попиксельного соответствия шаблона в искомом изображении. Любое отклонение гаммы, света или размера приведут к тому, что методы не будут работать. Напомню, что это именно наш случай: кнопки могут быть разного размера и разного цвета.
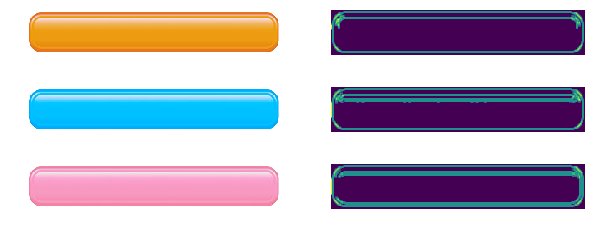
Проблему разного цвета и света можно решить применив фильтр нахождения граней (edge detection filter). Этот метод оставляет лишь информацию о том, в каком месте изображения находились резкие перепады цвета. Примененим Canny Edge Detector (его подробнее разберём чуть дальше) к кнопкам разного цвета и яркости. Слева приведены исходные баннеры, а справа — результат применения фильтра Canny.
В нашей случае, также существует проблема разных размеров, однако она уже была решена. Лог-полярная трансформация преобразует картинку в пространство, в котором изменение масштаба и поворот будут проявляться как смещение. Используя эту трансформацию, мы можем восстановить масштаб и угол. После этого, отмасштабировав и повернув шаблон, можно найти и позицию шаблона на исходной картинке. Во всей этой процедуре также можно использовать FFT, как описано в статье An FFT-Based Technique for Translation, Rotation, and Scale-Invariant Image Registration . В литературе рассматривается случай, когда по горизонтали и вертикали шаблон изменяется пропорционально, и при этом коэффициент масштаба варьируется в небольших пределах (2.0… 0.8). К сожалению, изменение размеров кнопки может быть бо́льшим и непропорциональным, что может привести к некорректному результату.
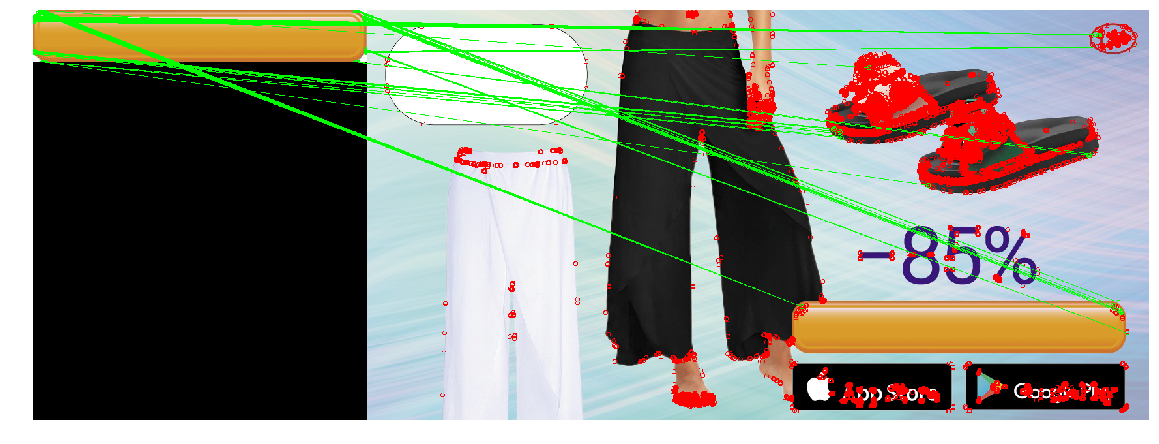
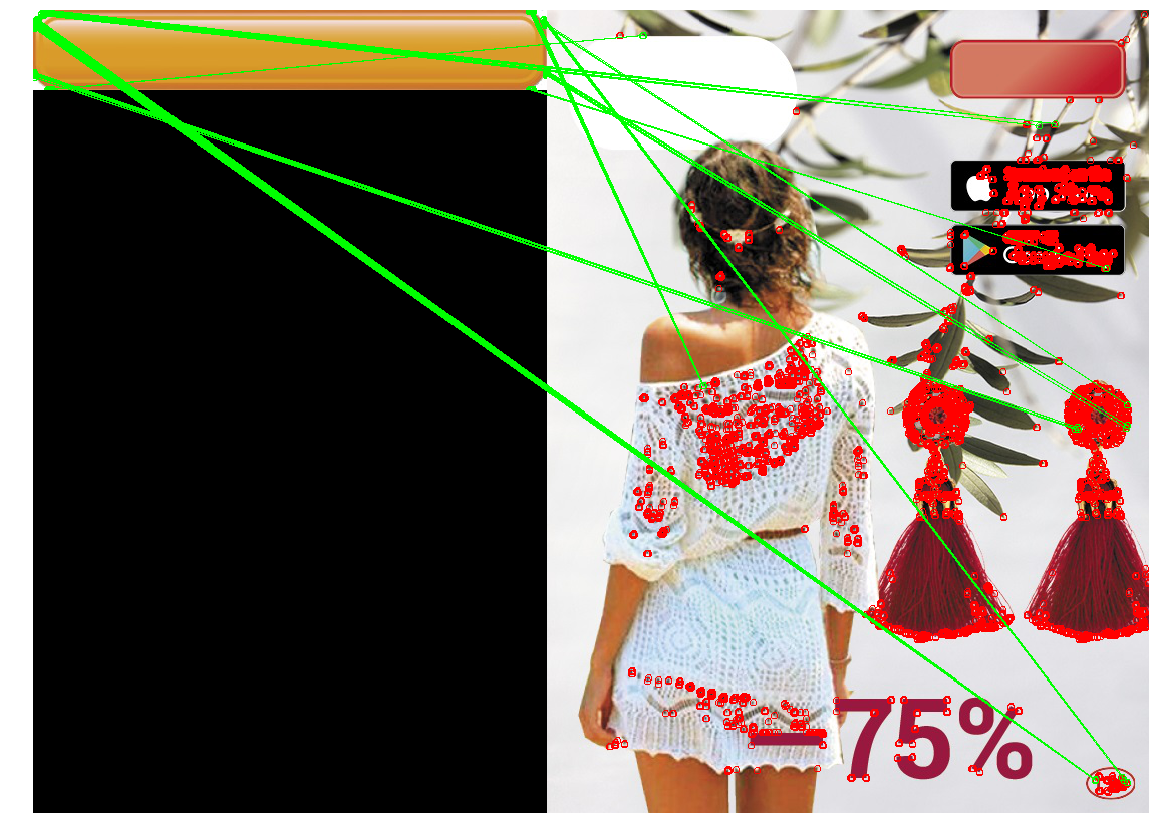
Применим полученную конструкцию (фильтр Canny, восстановление только масштаба через лог-полярную трансформацию, получение положения через нахождения места с минимальным квадратичным расхождением), для нахождения кнопки на трех картинках. В качестве шаблона будем использовать большую желтую кнопку:

При этом на баннерах кнопки будут разных типов, цветов и размеров:

В случае с изменением размера кнопки метод сработал некорректно. Это связано с тем, что метод предполагает изменение размеров кнопок в одинаковое количество раз и по горизонтали, и по вертикали. Однако, это не всегда так. На правой картинке размер кнопки по вертикали не изменился, а по горизонтали — уменьшился сильно. При слишком большом изменении размера искажения, вызванные логполярным преобразованием, делают поиск нестабильным. В связи с этим метод не смог обнаружить кнопку в третьем случае.
Keypoint detection
Можно попробовать другой подход: давайте вместо того, чтобы искать кнопку целиком, найдём её типичные части, например, углы кнопки, или элементы бордюра (по контуру кнопки есть декоративная обводка). Кажется, что найти углы и бордюр проще, так как это мелкие (а значит, простые) объекты. То, что лежит между четырёх углов и бордюра — и будет кнопкой. Класс методов нахождения ключевых точек называется “keypoint detection”, а алгоритмы сравнения и поиска картинок с помощью ключевых точек — “keypoint matching”. Поиск шаблона на картинке сводится к применению алгоритма обнаружения ключевых точек к шаблону и картинке, и сопоставлению ключевых точек шаблона и картинки.
Обычно “ключевые точки” находят автоматически, находя пиксели, окружение которых которых обладает определёнными свойствами. Было придумано множество способов и критериев их нахождения. Все эти алгоритмы являются эвристиками, которые находят какие-то характерные элементы изображения, как правило — углы или резкие перепады цвета. Хороший детектор должен работать быстро, и быть устойчивым к трансформациям картинки (при изменении картинки ключевые точки не должны переставать находиться/двигаться).
Harris corner detector
Одним из самых базовых алгоритмов считается Harris corner detector. Для картинки (тут и дальше мы считаем, что оперируем “интенсивностью” — изображением, переведенной в grayscale) он пытается найти точки, в окрестностях которых перепады интенсивности больше определенного порога. Алгоритм выглядит так:
-
От интенсивности
 находятся производные по оси X и Y (
находятся производные по оси X и Y ( и
и  соответственно). Их можно найти, например, применив фильтр Собеля.
соответственно). Их можно найти, например, применив фильтр Собеля. -
Для пикселя считаем квадрат
, квадрат и произведения и . Некоторые источники обозначают их как  ,
,  и — что не добавляет понятности, так как можно подумать, что это вторые производные интенсивности (а это не так).
и — что не добавляет понятности, так как можно подумать, что это вторые производные интенсивности (а это не так). -
Для каждого пикселя считаем суммы в некой окрестности (больше 1 пикселя) w следующие характеристики:



Как и в Template Detection, эту процедуру для больших окон можно провести эффективно, если использовать теорему о свертке.
-
Для каждого пикселя посчитать значение
 эвристики R
эвристики R 
Значение
 подбирается эмпирически в диапазоне [0.04, 0.06] Если
подбирается эмпирически в диапазоне [0.04, 0.06] Если  у какого-то пикселя больше определенного порога, то окрестность
у какого-то пикселя больше определенного порога, то окрестность  этого пикселя содержит угол, и мы отмечаем его как ключевую точку.
этого пикселя содержит угол, и мы отмечаем его как ключевую точку.
-
Предыдущая формула может создавать кластеры лежащих рядом друг с другом ключевых точек, в таком случае стоит их убрать. Это можно сделать проверив для каждой точки является ли у неё значение
максимальным среди непосредственных соседей. Если нет — то ключевая точка отфильтровывается. Эта процедура называется non-maximum suppression.
 Формула выбрана так неспроста.
Формула выбрана так неспроста.  — компоненты структурного тензора — матрицы, описывающую поведение градиента в окрестности:
— компоненты структурного тензора — матрицы, описывающую поведение градиента в окрестности:

Эта матрица многими свойствами и формой похожа на матрицу ковариации. Например, они обе положительно полуопределённые матрицы, но этим сходство не ограничивается. Напомню, что у матрицы ковариации есть геометрическая интерпретация. Собственные вектора матрицы ковариации указывают на направления наибольшей дисперсии исходных данных (на которых ковариация была посчитана), а собственные числа — на разброс вдоль оси:

Картинка взята из http://www.visiondummy.com/2014/04/geometric-interpretation-covariance-matrix/
Точно так же ведут себя и собственные числа структурного тензора: они описывают разброс градиентов. На ровной поверхности собственные числа структурного тензора будут маленькими (потому что разброс самих градиентов будет маленьким). Собственные числа структурного тензора, построенного на кусочке картинки с гранью, будут сильно различаться: одно число будет большим (и соответствовать собственному вектору, направленному перпендикулярно грани), а второе — маленьким. На тензоре угла оба собственных числа будут большие. Исходя из этого, мы можем построить эвристику ( — собственные числа структурного тензора).
— собственные числа структурного тензора).

Значение этой эвристики будет большое, когда оба собственных числа — большие.
Сумма собственных чисел — это след матрицы, который можно рассчитать как сумму элементов на диагонали (а если взглянуть на формулы A и B, то станет понятно, что это еще и сумма квадратов длин градиентов в области):

Произведение собственных чисел — определитель матрицы, который в случае 2×2 тоже легко выписать:

Таким образом, мы можем эффективно посчитать , выразив её в терминах компонентов структурного тензора.
FAST
Метод Харриса хорош, но существует множество альтернатив ему. Рассматривать так же подробно, как метод выше, все не будем, упомянем лишь несколько популярных, чтобы показать интересные приёмы и сравнить их в действии.

Пиксели, проверяемые алгоритмом FAST
Альтернатива методу Харриса — FAST. Как подсказывает название, FAST работает гораздо быстрее вышеописанного метода. Этот алгоритм пытается найти точки, которые лежат на краях и углах объектах, т.е. в местах перепада контраста. Их нахождение происходит следующим образом: FAST строит вокруг пикселя-кандидата окружность радиуса R, и проверяет, есть ли на ней непрерывный отрезок из пикселей длины t, который темнее (или светлее) пикселя-кандидата на K единиц. Если это условие выполняется, то пиксель считается “ключевой точкой”. При определённых t мы можем реализовать эту эвристику эффективно, добавив несколько предварительных проверок, которые будут отсекать пиксели гарантированно не являющиеся углами. Например, при  и
и  , достаточно проверить, есть ли среди 4 крайних пикселей 3 последовательных, которые строго темнее/светлее центра на K (на картинке — 1, 5, 9, 13). Это условие позволяет эффективно отсечь кандидатов, точно не являющихся ключевыми точками.
, достаточно проверить, есть ли среди 4 крайних пикселей 3 последовательных, которые строго темнее/светлее центра на K (на картинке — 1, 5, 9, 13). Это условие позволяет эффективно отсечь кандидатов, точно не являющихся ключевыми точками.
SIFT
Оба предыдущих алгоритма не устойчивы к изменениям размера картинки. Они не позволяют найти шаблон на картинке, если масштаб объекта был изменён. SIFT (Scale-invariant feature transform) предлагает решение этой проблемы. Возьмем изображение, из которого извлекаем ключевые точки, и начнём постепенно уменьшать его размер с каким-то небольшим шагом, и для каждого варианта масштаба будем находить ключевые точки. Масштабирование — тяжелая процедура, но уменьшение в 2/4/8/… раз можно провести эффективно, пропуская пиксели (в SIFT эти кратные масштабы называются “октавами”). Промежуточные масштабы можно аппроксимировать, применяя к картинке гауссовский блюр с разным размером ядра. Как мы уже описали выше, это можно сделать вычислительно эффективно. Результат будет похож на то, как если бы мы сначала уменьшили картинку, а потом увеличили ее до исходного размера — мелкие детали теряются, изображение становится “замыленным”.
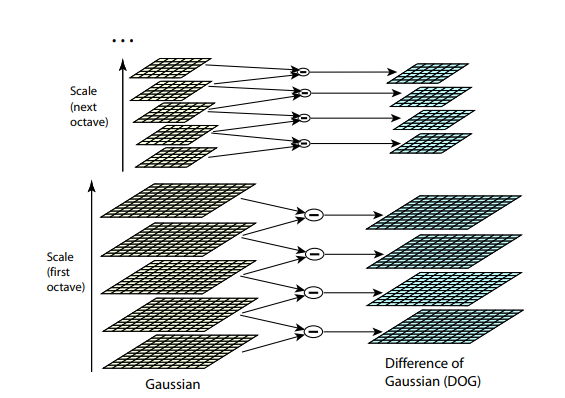
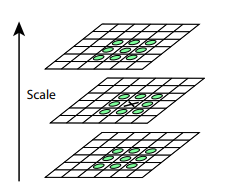
После этой процедуры посчитаем разницу между соседними масштабами. Большие (по модулю) значения в этой разнице получатся, если какая-то мелкая деталь перестает быть видна на следующем уровне масштаба, или, наоборот, следующий уровень масштаба начинает захватывает какую-то деталь, которая на предыдущем не была видна. Этот прием называется DoG, Difference of Gaussian. Можно считать, что большое значение в этой разнице уже является сигналом того, что в этом месте на изображении есть что-то интересное. Но нас интересует тот масштаб, для которого эта ключевая точка будет наиболее выразительной. Для этого будем считать ключевой точкой не только точку, которая отличается от своего окружения, но и отличается сильнее всего среди разных масштабов изображений. Другими словами, выбирать ключевую точку мы будем не только в пространстве X и Y, а в пространстве  . В SIFT это делается путём нахождения точек в DoG (Difference of Gaussians), которые являются локальными максимумами или минимумами в
. В SIFT это делается путём нахождения точек в DoG (Difference of Gaussians), которые являются локальными максимумами или минимумами в  кубе пространства вокруг неё:
кубе пространства вокруг неё:
Алгоритмы нахождения ключевых точек и построения дескрипторов SIFT и SURF запатентованы. То есть, для их коммерческого использования необходимо получать лицензию. Именно поэтому они недоступны из основного пакета opencv, а только из отдельного пакет opencv_contrib. Однако, пока что наше исследование носит исключительно академический характер, поэтому ничто не мешает поучаствовать SIFT в сравнении.
Дескрипторы
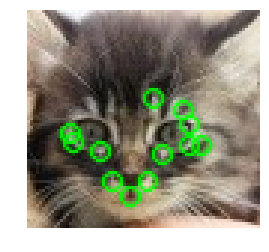
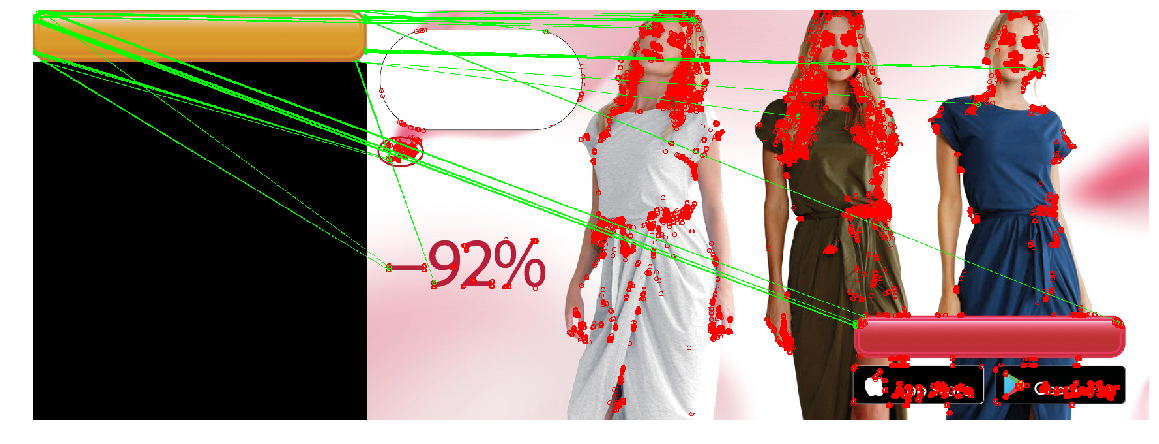
Попробуем применить какой-нибудь детектор (например, Харриса) к шаблону и картинке.
После нахождения ключевых точек на картинке и шаблоне надо как-то сопоставить их друг с другом. Напомню, что мы пока извлекли только положения ключевых точек. То, что обозначает эта точка (например, в какую сторону направлен найденный угол), мы пока не определили. А такое описание может помочь при сопоставлении точек изображения и шаблона друг с другом. Часть точек шаблона на картинке может быть сдвинута искажениями, закрыта другими объектами, поэтому опираться исключительно на положение точек относительно друг друга кажется ненадежным. Поэтому давайте для каждой ключевой точки возьмём её окрестность чтобы построить некое описание (дескриптор), которое потом позволит взять пару точек (одну точку из шаблона, одну из картинки), и сравнить их схожесть.
BRIEF
Если мы сделаем дескриптор в виде бинарного массива (т.е. массив из 0 и 1), то мы их сможем сравнивать крайне эффективно, сделав XOR двух дескрипторов, и посчитать количество единичек в результате. Как составить такой вектор? Например, мы можем выбрать N пар точек в окрестности ключевой точки. Затем, для i-й пары проверить, является ли первая точка ярче второй, и если да — то в i-ю позицию дескриптора записать 1. Таким образом мы можем составить массив длины N. Если мы будем выбирать в качестве одной из точек всех пар какую-то одну точку в окрестности (например, центр окрестности — саму ключевую точку), то такой дескриптор будет неустойчивым к шуму: достаточно немного поменяться яркости всего одного пикселя, чтобы весь дескриптор “поехал”. Исследователи обнаружили, что достаточно эффективно выбрать точки случайно (из нормального распределения с центром в ключевой точке). Это положено в основу алгоритма BRIEF.

Часть рассмотренных авторами методов генераций пар. Каждый отрезок символизирует пару сгенерированных точек. Авторы обнаружили, что вариант GII работает чуть лучше остальных вариантов.
После того, как мы выбрали пары, их стоит зафиксировать (т.е. пары генерировать не при каждом запуске расчёта дескриптора, а сгенерировать один раз, и запомнить). В реализации от OpenCV эти пары и вовсе сгенерированы заранее и захардкожены.
Дескриптор SIFT
SIFT также может эффективно считать дескрипторы, используя результаты применения гауссового размытия на разных октавах на картинке. Для расчёта дескриптора SIFT выбирает регион 16х16 вокруг ключевой точки, и разбивает его на блоки 4х4 пикселя. Для каждого пикселя считается градиент (мы оперируем в том же масштабе и октаве, в котором была найдена ключевая точка). Градиенты в каждом блоке распределяются на 8 групп по направлению (вверх, вверх-вправо, вправо, и т.д.). В каждой группе длины градиентов складываются — получается 8 чисел, которые можно представить как вектор, описывающий направление градиентов в блоке. Этот вектор нормируется для устойчивости к изменению яркости. Так, для каждого блока рассчитывается 8-мерный вектор единичной длины. Эти вектора конкатенируются в один большой дескриптор длины 128 (в окрестности 4*4 = 16 блоков, в каждом по 8 значений). Для сравнения дескрипторов используется Евклидово расстояние.
Сравнение
Находя пары наиболее подходящих друг к другу ключевых точек (например — жадно составляя пары, начиная с самых похожих по дескрипторам), мы наконец-таки сможем сравнить шаблон и картинку:

Котик нашелся — но тут у нас имеется попиксельное соответствие между шаблоном и фрагментом картинки. А что будет в случае кнопки?
Предположим, перед нами прямоугольная кнопка. Если ключевая точка расположена на углу, то три четверти локали точки будет именно то, что лежит за пределами кнопки. А то, что лежит за пределами кнопки, сильно меняется от картинки к картинке, в зависимости от того, поверх чего расположена кнопка. Какая доля дескриптора будет оставаться постоянной при изменении фона? В дескрипторе BRIEF, так как координаты пары выбираются в локали случайно и независимо, бит дескриптора будет оставаться постоянным только в случае, когда обе точки лежат на кнопке. Другими словами, в BRIEF всего 1/16 дескриптора не будет меняться. В SIFT ситуация чуть лучше — из-за блочной структуры 1/4 дескриптора меняться не будет.
В связи с этим дальше будем использовать дескриптор SIFT.
Сравнение детекторов
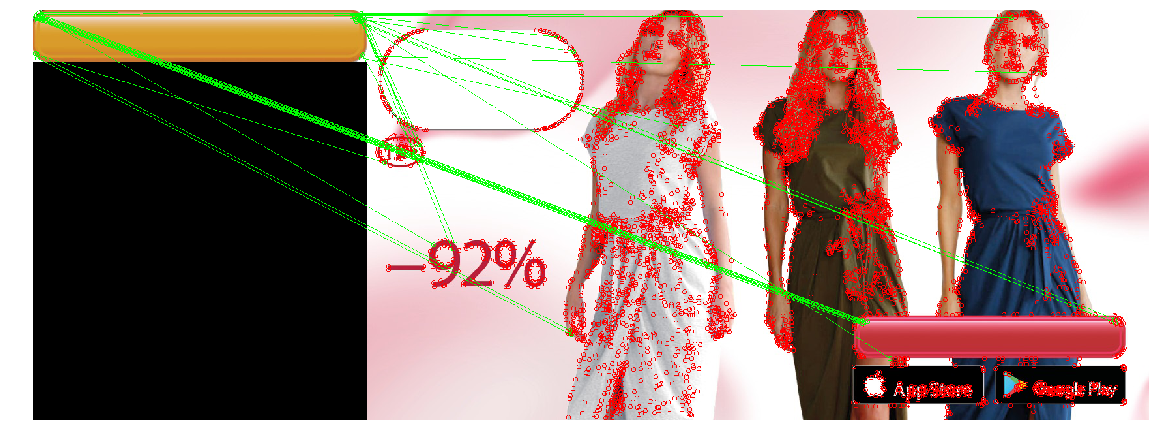
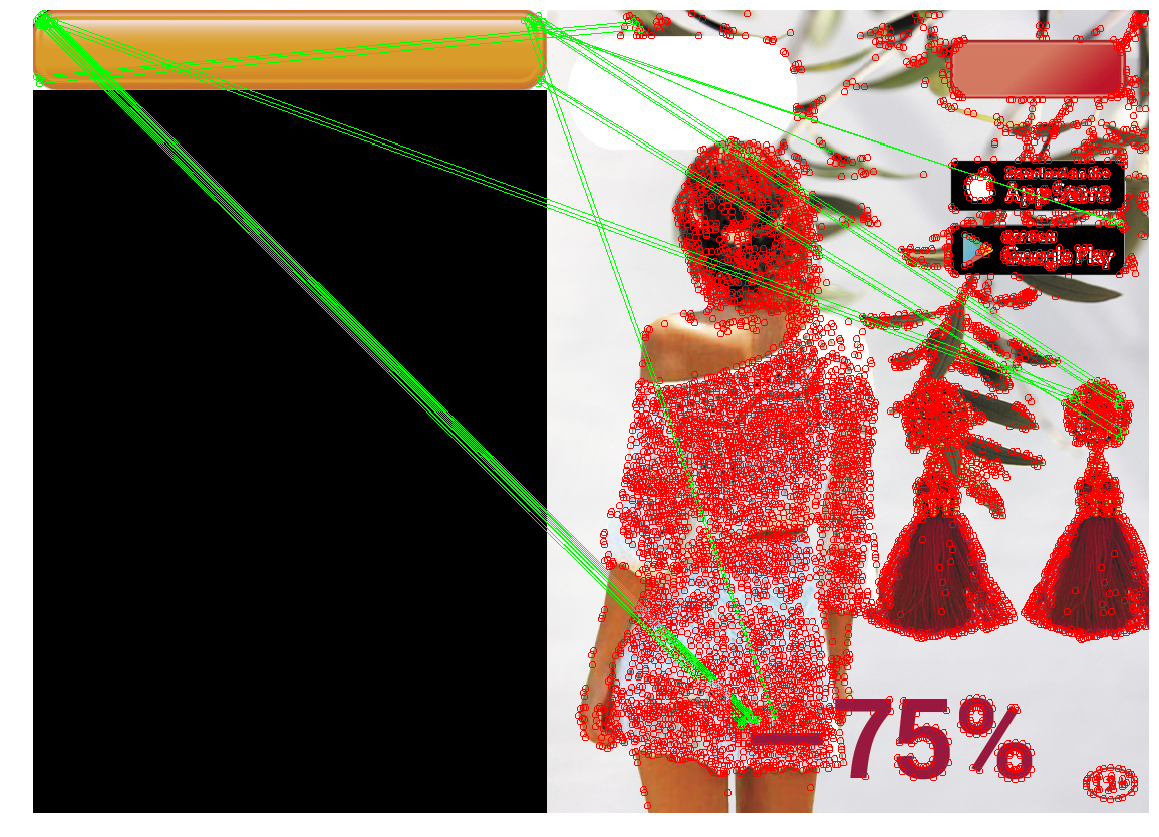
Теперь применим все полученные знания для решения нашей задачи. В нашем случае требования к детектору ключевых точек достаточно: инвариантность к изменению размера нам ни к чему, равно как и крайне высокая производительность. Сравним все три детектора.
| Harris corner detector | FAST | SIFT |
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
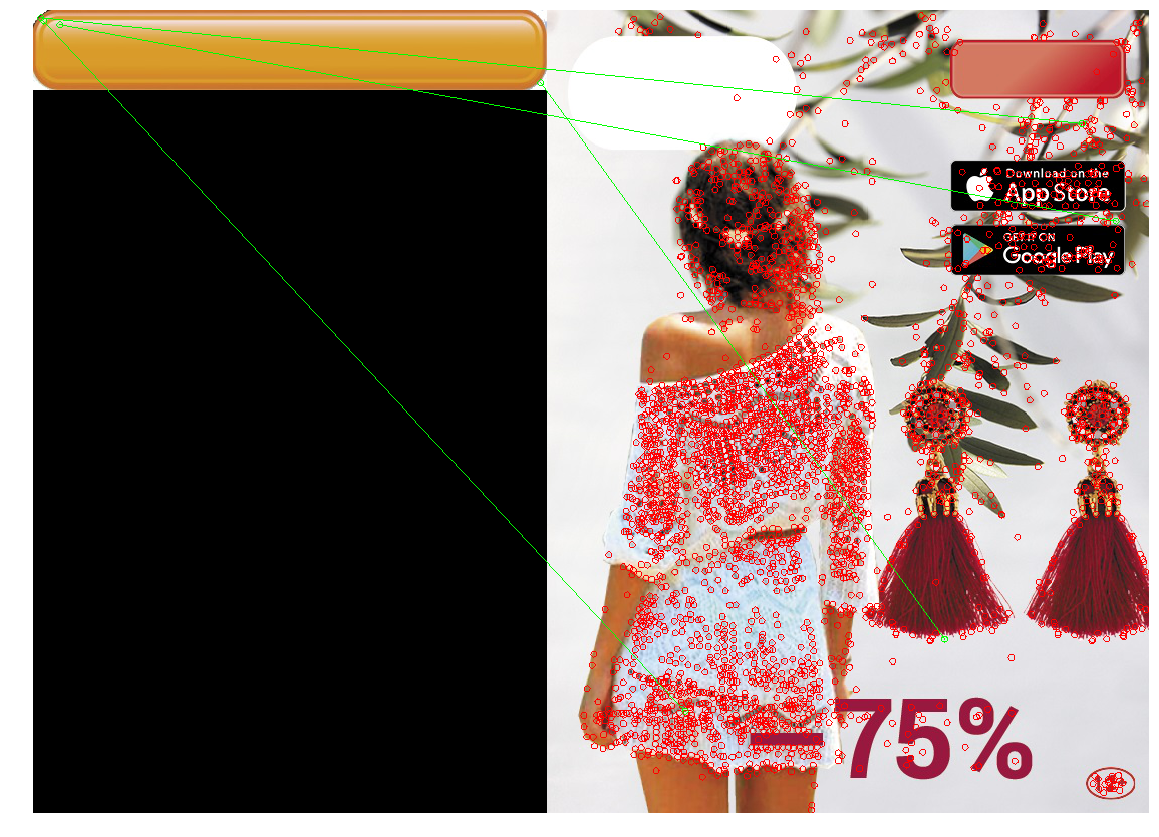 |
SIFT нашел крайне мало ключевых точек на кнопке. Это объяснимо — кнопка представляет собой достаточно небольшой и плоский объект, и изменение масштаба не помогает найти ключевые точки.
Также, ни один детектор не справился с третьим случаем. Это объяснимо и ожидаемо. Обычно вышеописанные методы применяют для того, чтобы найти объект из шаблона на снимке, на котором он может быть частично скрыт, быть повернут, или немного искажен. В нашем случае мы хотим найти не точно такой же объект , а объект, достаточно похожий на шаблон (кнопку) . Это немного другая задача. Так, изменение самой формы кнопки (например, радиуса скругления углов, или толщины рамки точек) меняет ключевые точки в них, и их дескрипторы. Кроме того, ключевые точки будут находиться на углу кнопки. Из-за положения на краю точки будут неустойчивы: на их точное расположение и дескрипторы влияет то, что нарисовано рядом с кнопкой.
Вывод — метод хорош, и корректно отрабатывает ситуации, когда искомый объект повернут, его размер изменен, или объект частично скрыт (что хорошо для поиска сложных объектов, или ценника, например). Однако, если на объекте мало точек, за которые можно “зацепиться”, или форма объекта меняется слишком сильно, то ключевые точки и их на шаблоне и изображении могут не совпасть. Также, фон с большим количеством мелких деталей может сместить “ключевые точки” или изменить их дескрипторы.
Мы можем придумать матчинг, который бы использовал координаты ключевых точек. Вместо того, чтобы искать пары точек на шаблоне и картинке, окрестность которых похожа, можно искать такие наборы точек, взаимоположение ключевых точек на шаблоне и картинке будут похожи. В общем случае это достаточно сложная (и вычислительно, и с точки зрения программирования) задача, особенно в ситуации, когда некоторые точки могут быть сдвинуты или отсутствовать. Но, учитывая, что у нас ключевые точки — углы, нам достаточно найти такие группы, которые будут примерно образовывать прямоугольник нужных пропорций, и внутри которого не будет ключевых точек. Постепенно мы подходим к следующему методу:
Contour detection
Обычно кнопка — это какой-то прямоугольный объект (иногда — со скруглёнными углами), стороны которого параллельны осям координат. Тогда давайте попробуем выделить зоны перепады контраста (грани/edges), и среди них найдем грани, очертания которых похожи на контур нужного нам объекта. Этот метод называется contour detection.
Edge detection
В отличии от keypoint detection, нам интересны не только ключевые точки-углы, но и рёбра. Однако, основные идеи мы можем взять оттуда. Сгладим изображение Гауссовым фильтром, и как в Harris corner detector. Затем посчитаем производные интенсивности и . Так как нам не нужно отличать углы от ребер, то не надо считать структурный тензор — достаточно посчитать силу градиента:  (кстати, это корень из
(кстати, это корень из  , или из суммы диагонали структурного тензора). После этого, оставим только пиксели, которые являются локальными максимумами в терминах
, или из суммы диагонали структурного тензора). После этого, оставим только пиксели, которые являются локальными максимумами в терминах  (используя уже расмотренный non-maximum suppression), но в качестве локали будем выбирать не 8 соседних пикселей, а те пиксели из этих 8, в сторону которого направлен I, и с противоположной стороны:
(используя уже расмотренный non-maximum suppression), но в качестве локали будем выбирать не 8 соседних пикселей, а те пиксели из этих 8, в сторону которого направлен I, и с противоположной стороны:
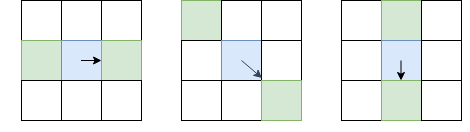
Синим отмечен рассматриваемый пиксель, стрелка — направление I. Зелёные пиксели — те, которые будут учитываться при non-maximum suppression.
Такой необычный выбор пикселей для сравнения обусловлен тем, что мы не хотим делать разрывы в границе. В левой картинке грань проходит сверху вниз, и так как non-maximum suppression не будет проводить сравнения интенсивности с пикселями выше и ниже синего, мы получим непрерывную грань.
Очевидно, одного non-maximum suppression недостаточно, и надо применить какую-то фильтрацию, чтобы убрать ребра со слишком низким Il. Для этого применим приём “double thresholding”: уберем все пиксели с Il, силой градиента, ниже порога Low, все пиксели выше порога High назначим “сильными ребрами”. Пиксели, у которых сила градиента лежит между Low и High, назовём “слабыми ребрами”, оставим только если они соединены с “сильными ребрами”:
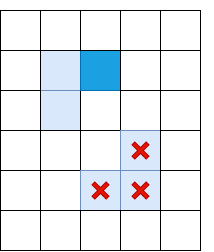
Светло-синим отмечены “слабые ребра”, тёмно-синим — сильные. Ребра в нижней части отсеиваются, так как они не соеденены ни с одним сильным ребром.
Мы только что описали Canny Edge Detector. Он крайне широко применяется и по сей день в качестве простой и быстрой процедуры, позволяющей найти контуры объектов.
Border tracking
Следующее действие — среди карты с найденными гранями выделить контуры. Найдем связанные компоненты (острова смежных пикселей, прошедших все проверки), и проверим каждый из них, насколько он похож на кнопку. После применения non-maximum suppression в Canny, у нас есть гарантии того, что ребра будут получаться толщиной в один пиксель, но давайте на будем на нее опираться. Для каждого пикселя, который был отнесен к грани, и рядом с которым есть пиксель не-грань, отнесем к “бордюру”. Перемещаясь от одного пикселя бордюра к другому, мы либо придём обратно в тот же пиксель (и тогда мы нашли контур), либо в тупик (тогда можно попробовать вернуться назад, если где-то по пути была развилка):

Полный алгоритм border tracking, учитывающий разные краевые случаи (например, когда объект с толстой гранью сгенерировал два контура, внутренний и внешний), описан тут. После применения этого алгоритма у нас останется набор контуров, которые потенциально могут быть кнопками.
Фильтрация контуров
Как узнать, что наш контур — кнопка? Для прямоугольников и многоугольников есть отличный > метод, основанный на упрощении контура. Достаточно постепенно “схлопывать” ребра, если они находятся почти на одной прямой, а затем посчитать количество оставшихся ребер, и проверить углы между ними. К сожалению, для нашего случая эти методы не подходят — наш прямоугольник имеет скругленные углы. Также, есть contour matching для фигур, имеющих сложную геометрию — но это тоже не про нас, так как у нас всего лишь прямоугольник (в статье приводятся примеры с контуром человека). Поэтому лучше сделать фильтр, основанный на свойства самой фигуры. Мы знаем, что:
- Кнопка достаточно большая (площадь больше 100 пикселей)
- Стороны параллельны осям координат
- Отношение площади фигуры к площади ограничивающего прямоугольника должна быть достаточно близка к единице. Мы устанавливаем порог в 0.8, так как кнопка — прямоугольник со сторонами параллельными осям координат, и недостающие 20% — это и есть скругленные углы.
Кроме того, по опыту применения детекторов ключевых точек мы помним, что могут быть проблемы с ситуациями, когда под кнопкой лежит контрастный объект. Поэтому после применения Canny размоем грани, чтобы закрыть мелкие дырки, которые могли возникнуть из-за таких объектов.
Применим получившийся подход:
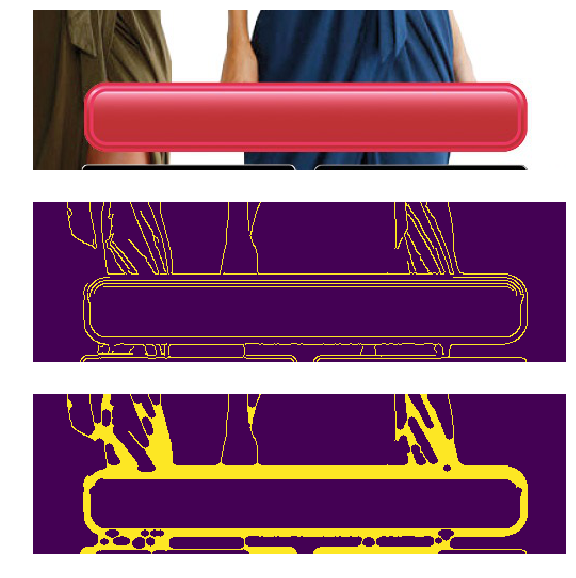
Применение Canny filter (2 картинка) нашло нужные очертания, но из-за сложной формы кнопки и градиента нашлось сразу много контуров, и из-за non-max suppression некоторые из них не были замкнуты. Применение размытия (3 картинка) исправило проблему.
Тестирование подхода
Запустим в получившейся картинке поиск контуров. Покрасим контуры, прошедшие проверки, красным цветом. Если таких несколько, то нам нужно выбрать среди них наиболее удачный вариант. Выберем контур наибольшей площади, и покрасим его в зелёный цвет.
|  |
|  |
|  |
|
Получившаяся конструкция нашла кнопки на тестовых изображениях. Прогон на всех баннерах показал, что изредка (1 случай из ~20) она вместо кнопки выделяет прямоугольные плашки iOS Appstore и Google Apps, или другие прямоугольные объекты (чехлы телефонов). Поэтому добавив возможность ручного указания положения на тот редкий случай неверного определения, мы реализовали этот вариант в инструменте локализации.
Заключение
Подведем итоги. “Классический” CV без deep learning по-прежнему работает, и на его основе можно решить задачи. Они неприхотливы и не требуют большого количества размеченных данных, мощного железа, и их проще отлаживать. Однако, они вводят дополнительные предположения, и поэтому с их помощью не каждую задачу можно решить эффективно.
- Template Matching — самый простой способ, основывается на нахождении места в изображении, наиболее похожем (по какой-то простой метрике) на шаблон. Эффективен при попиксельном совпадении. Можно сделать устойчивым к поворотам и небольшим изменениям размеров, но при больших изменениях может работать некорректно.
- Keypoint detection/matching — находим ключевые точки, сопоставляем точки изображения и шаблона. Детекторы устойчивы к поворотам, изменениям масштаба (в зависимости от выбранного детектора и дескриптора), а сопоставление — к частичным перекрытиям. Но этот метод хорошо работает только если в объекте нашлось достаточно “ключевых точек”, и локали точки шаблона и изображения совпадают достаточно хорошо (т.е. на шаблоне и картинке — один и тот же объект).
- Contour detection — нахождение контуров объектов, и поиске контура, похожего на контур искомого объекта. Это решение учитывает только форму объекта, и игнорирует его содержимое и цвет (что может быть как и плюсом, так и минусом).
Осведомленный читатель может заметить, что наша задача может быть решена и с помощью современных обучаемых методов computer vision. Например, сеть YOLO возвращает bounding box искомого объекта — а именно это нас и интересует. Да, мы успешно протестировали и запустили решение, основанные на глубоком обучении — но в качестве второй итерации (уже после того, как инструмент локализации был запущен и начал работать). Эти решения более устойчивы к изменениям параметров кнопок, и имеют много положительных свойств: например, вместо того, чтобы подбирать руками пороги и параметры, можно просто добавлять в тренировочное множество примеры баннеров, на которых сеть ошибается (Active Learning). Использование глубокого обучение для нашей задачи имеет свои проблемы и интересные моменты. Например — многие современные методы computer vision требуют большого количества размеченных картинок, а у нас разметки не было (как и во многих реальных случаях), а общее количество разных баннеров не превышает нескольких тысяч. Поэтому мы решили разметить небольшое количество изображений сами, и написать генератор, который будет на их основе создавать другие похожие баннеры. В этом направлении есть немало интересных приёмов. Есть много других подводных камней, да и сама задача определения положения объекта computer vision обширна, и имеет много способов решения. Поэтому было принято решение ограничить поле обзора статьи, и решения, основанные на глубоком обучении, не были рассмотрены.
Код с блокнотами, которые реализуют описанные методы и рисуют картинки статьи, можно найти в репозитории).

Люди, которые имеют какое-то изображение, часто хотят найти нечто похожее в интернете. Также у многих возникает вопрос, как можно узнать по фото, что это такое. Сделать это несложно. В данном случае допустимо использовать специальные инструменты поисковых систем – Google и Яндекс. Также прекрасным вариантом станут специальные сервисы – в частности, TinEye и PhotoTracker Lite.
Через Google
Функционал сервиса Гугл дает возможность эффективно опознать объекты на фотографиях, сделанных пользователем. При этом компания все время улучшает работу своего ресурса. С помощью активного использования возможностей нейронных сетей она помогает сделать его работу более эффективной.
Google Объектив
Использование сервиса отличается простотой. Для этого достаточно навести камеру на объект или просто выбрать фото из галереи. После этого откроется страница с аналогичными картинками, полезной информацией или сайтами на нужную тематику.
Программа дает возможность распознать объект на фото и определить, на каких еще изображениях он присутствует. При этом она выбирает наиболее похожие из них. Также приложение позволяет отыскать сайты с дополнительными сведениями. Во время поиска учитываются также другие сигналы. Это может быть текст на картинках или информация на опубликованных страницах.
В одних случаях ресурс предоставляет ряд возможных результатов поиска, которые сортируются по уровню совпадения, в других – выдает единственный вариант. К примеру, пользователю нужно установить породу собаки. По фото она на 95 % напоминает немецкую овчарку, а на 5 % – похожа корги. Вполне вероятно, в результатах отобразится только первый вариант.

Если понять, что присутствует на фото, результаты поиска в программе никак не будут отличаться от информации обычного поиска в Гугл. Иными словами, если навести камеру на кроссовки, Объектив сможет распознать торговую марку и модель. Также приложение выдаст перечень магазинов, в которых можно приобрести это изделие. Иногда в результатах также появляются отзывы и иные полезные сведения. К тому же программа отсканирует штрих-код и распознает текст на картинке – в частности, название книги.
Алгоритм Объектива функционирует таким образом, чтобы пользователи всегда находили нужные им сведения. Это не зависит от рекламодателей и партнеров Гугл. Но если результаты попадают из других продуктов пользователя – к примеру, из Покупок или Поиска, они упорядочиваются так же, как в этих сервисах. Объектив всегда предлагает ценные и безопасные результаты. Из них удаляются неприемлемые сведения.
Чтобы сделать поиск точнее, нужно предоставить Объективу доступ к своему местоположению. Эта опция полезна в различных ситуациях. Если человек планирует путешествие, он сможет получать больше сведений о достопримечательностях. К примеру, Эйфелева башня имеет копии в различных городах мира. Если же ресурсу будет известно, что пользователь находится в Париже, то продемонстрирует ему правильную информацию.
Эта программа доступна в приложении «Камера» на ряде устройств с операционной системой Андроид. Чтобы воспользоваться ресурсом, нужно сделать следующее:
- Открыть приложение Гугл Фото на устройстве с Андроид.
- Выбрать фотографию.

- Нажать на символ Объектива.
- В зависимости от изображения на фото посмотреть информацию о предмете совершить определенное действие или найти аналогичный продукт.

Гугл Объектив можно использовать для поиска следующих данных:
- Одежда и товары для дома. Тут можно найти аналогичные изделия и узнать, где они продаются.
- Штрих-код. С помощью этого шифра можно найти информацию о товаре и отыскать магазины, в которых он продается.
- Визитная карточка. Здесь можно сохранить в контакты телефонный номер или адрес.
- Книга. Ресурс позволяет ознакомиться с кратким содержанием литературного произведения и почитать отзывы.
- Рекламная листовка или афиша. Здесь можно внести сведения о мероприятии в календарь.
- Здание или достопримечательность. Тут можно ознакомиться с историческими фактами, временем работы или получить иную полезную информацию.
- Картина в музее. Ресурс предоставляет сведения о художнике или интересные факты о самой работе.
- Животное или растение. Приложение позволяет найти сведения о породе животного или сорте растения.
Сервис от Яндекса
Функции Яндекса дают возможность успешно установить объекты на фото и найти изображения в результатах поисковика.
Компания пользуется своей технологией поиска по картинке, которая называется «Сибирь». После загрузки пользователем фото она разбивается на отдельные фрагменты – визуальные слова. По этим критериям система производит поиск. Иногда приложение Яндекса работает эффективнее аналогов.
Чтобы получить нужные результаты, рекомендуется выполнить такие действия:
- Зайти на сайт ru.
- Нажать на изображение фотоаппарата.
- В новом окне нажать «Выбрать файл» и загрузить фотографию с неопознанным объектом на ресурс. Также можно переместить нужную картинку, чтобы определить объект.
- Через несколько секунд ресурс найдет совпадения и предоставит пользователю возможное название объекта и аналогичные фотографии.
Сторонние сервисы
Для определения информации, предоставленной на фото, можно использовать различные приложения.
PhotoTracker Lite
Это расширение для браузера дает возможность в один клик находить похожие фото. При этом он использует не только упомянутые ранее источники, но и поисковик Bing.
Для этого в настройках приложения требуется выполнить следующее:
- Указать источники поиска.
- Нажать правой кнопкой мыши на любое изображение в браузере.
- Выбрать функцию «Искать это изображение».
Также можно воспользоваться другим методом поиска. По умолчанию в настройках ресурса активирован пункт «Показывать иконку быстрого запуска». Если навести курсор на изображение, появится круглая зеленая иконка. Нажатие на нее запускает поиск аналогичных картинок. При этом в новых вкладках автоматически появятся результаты поиска в разных системах.
TinEye
Этот сервис придуман экспертами в области машинного обучения и распознавания объектов. Благодаря этому ресурс можно применять для поиска похожих изображений и их элементов. Индексированная база TinEye включает больше 10 миллиардов позиций.
Для использования ресурса стоит сделать следующее:
- Перейти по ссылке https://www.tineye.com/.
- Загрузить файл-образец или ссылку на него.
- Получить точную информацию о том, сколько раз картинка встречается в сети, и ссылки на страницы, на которых она присутствует.
Сегодня существует много ресурсов, которые позволяют определить, что изображено на фото. Это позволяет получить большое количество ценной информации. Чтобы добиться нужных результатов, стоит воспользоваться ресурсами Гугла или Яндекса. Также можно применять сторонние приложения.
Сейчас уже существует довольно много мобильных приложений, которые распознают фотографии для получения некоторой полезной информации о людях или объектах на нём. Одно из таких приложений – Face Effect, позволяет за считанные секунды наложить макияж, увидеть себя более молодым или старым, изменить прическу или изменить цвет волос, отрастить бороду и даже изменить пол. Все фильтры бесплатные и без ограничений.
![]()
Платформа: Android
Цена: Бесплатно
![]()
Платформа: iOS
Цена: Бесплатно

Загружаете фото лица крупным планом выбираете любой понравившийся AI эффект и через пару секунд получаете результат. Приложение Face Effect можно скачать по ссылкам: на Android и iOS.
У компании Яндекс тоже есть функции распознавания изображений, они встроены в их голосового помощника. Алиса научилась искать информацию по фотографиям с камеры или любым другим картинкам, которые вы ей отправите. На основе загруженного изображения помощник может сделать некоторые полезные действия. Эти новыми функциями можно воспользоваться в приложении Яндекс и Яндекс.Браузер.
Также по команде «Алиса, измени меня» откроется режим фоторедактора в котором вы можете изменять свою внешность как в приложениях faceapp (фейсапп) или gradient (градиент) бесплатно и без ограничений.
Содержание
- Где скачать Алису
- Активация функции распознавания изображений
- Список возможностей и команд
- Приложение со списком команд
Где скачать Алису с поиском по картинкам
Голосовой ассистент Алиса встроен в приложение под названием «Яндекс». Скачать приложение для Android и iOS можно по этим ссылкам:

Платформа: Android
Цена: Бесплатно

Платформа: iOS
Цена: Бесплатно

Как включить поиск по картинкам в Алисе
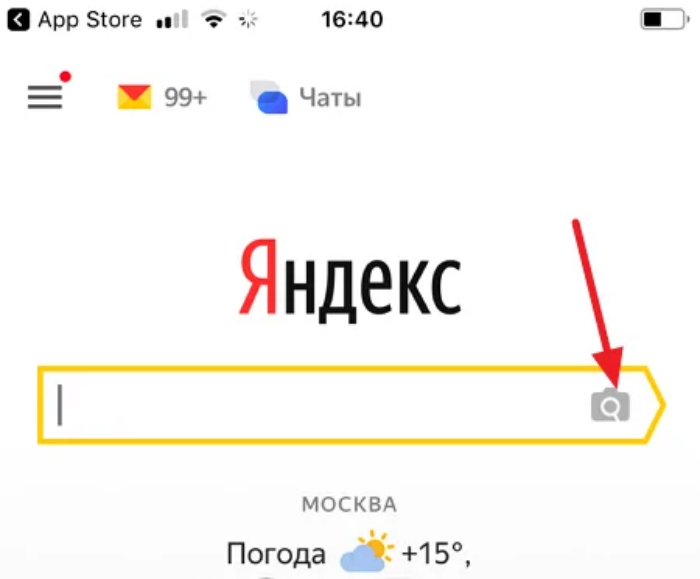
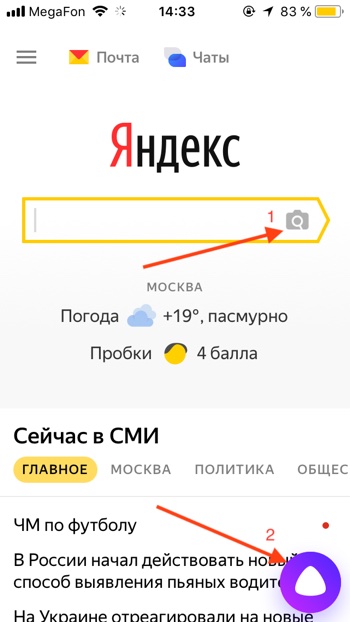
- Чтобы открыть Алису нажимаем на красный значок приложения «Яндекс».

- Первый способ открыть функцию распознавания изображений: нажимаем на серый значок фотоаппарата с лупой в поисковой строке и переходим к шагу 4. Второй способ: нажимаем на фиолетовый значок Алисы или говорим «Алиса» если у вас включена голосовая активация.
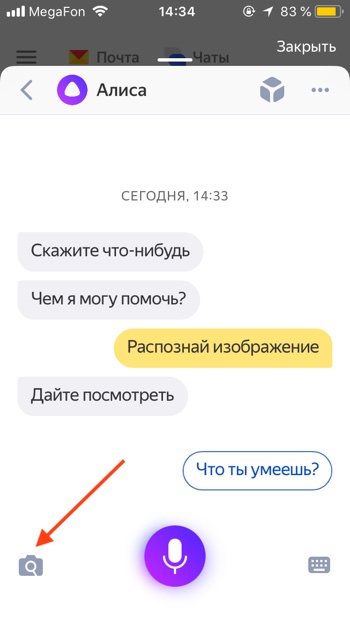
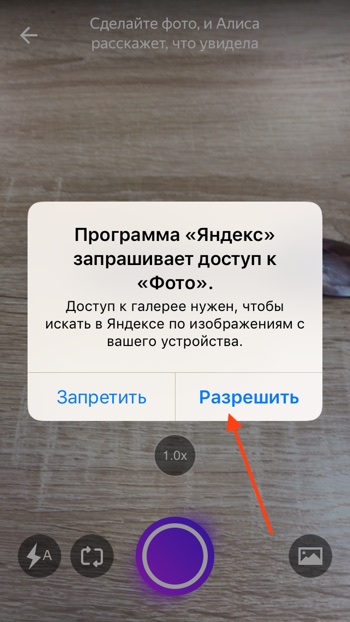
- Откроется диалог (чат) с Алисой. Нужно дать команду Алисе «Распознай изображение» или «Сделай фото». Также вы можете нажать на серый значок фотоаппарата с лупой.
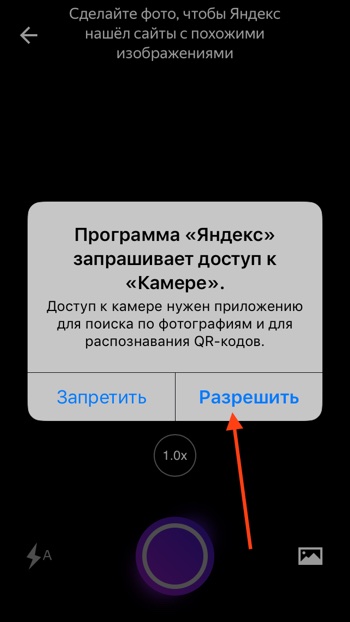
- Приложение попросит доступ к камере вашего мобильного устройства. Нажимаем «Разрешить».
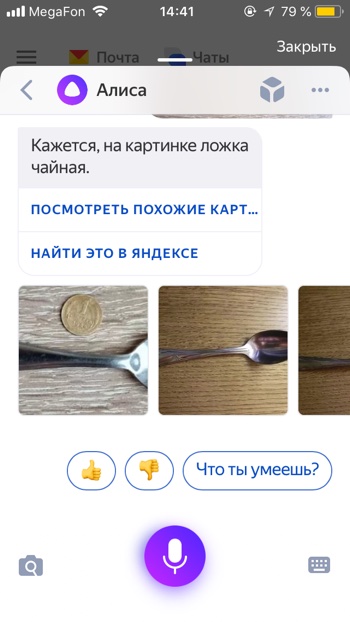
- Откроется режим съёмки. Здесь вы можете загрузить изображение из вашей галлереи или сделать новый снимок прямо сейчас. Нажмите на фиолетовый круг, чтобы сделать снимок.

- Алиса распознает объект на изображении.
- Давайте попробуем загрузить фотографию из памяти, т.е. галереи вашего iPhone или Android. Нажимаем на иконку с фотографией.

- Алиса попросит доступ к вашим фотографиям. Нажимаем «Разрешить».
- Выбираем фотографию.
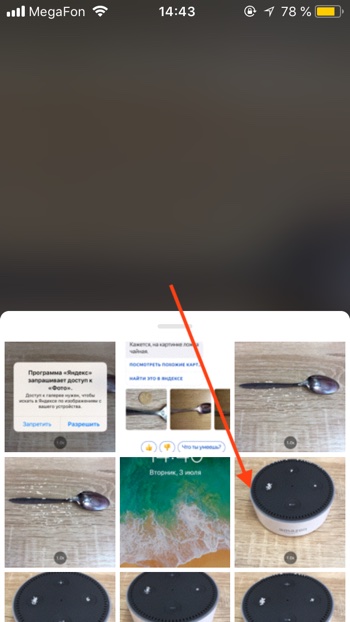
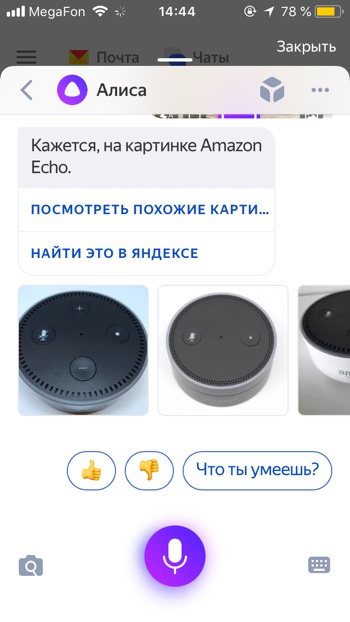
- Через некоторое время фотография загрузится на сервера Яндекса и Алиса вам скажет, на что похоже загруженное изображение. В нашем случае мы загрузили фотографию умной колонки Amazon Echo Dot, и Алиса её успешно распознала.
Возможности Алисы по распознаванию изображений и список команд
Помимо общей команды «сделай фото», Алисе можно дать более точную команду по распознаванию объекта. Алиса умеет делать следующие операции с изображениями по соответствующим командам:
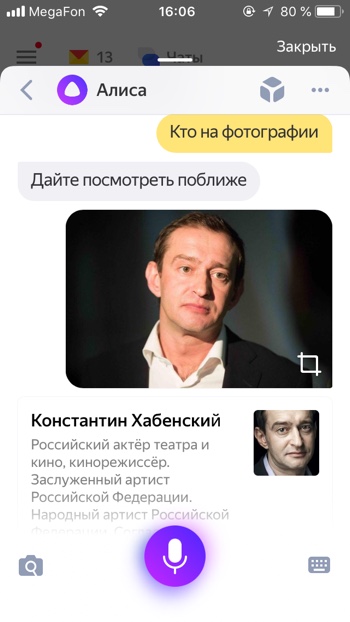
Узнать знаменитость по фото
- Кто на фотографии?
- Что за знаменитость на фотографии?
Алиса распознаёт фото знаменитых людей. Мы загрузили изображение актёра Константина Хабенского и Алиса успешно распознала его.
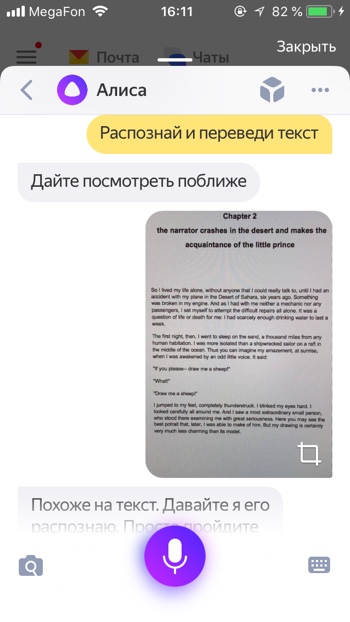
Распознать надпись или текст и перевести его
- Распознай текст
- Распознай и переведи надпись
Вы можете загрузить фотографию с текстом и Алиса распознает его и даже поможет его перевести. Для того, чтобы распознать и перевести текст с помощью Алисы необходимо:
— Загрузить фото с текстом.
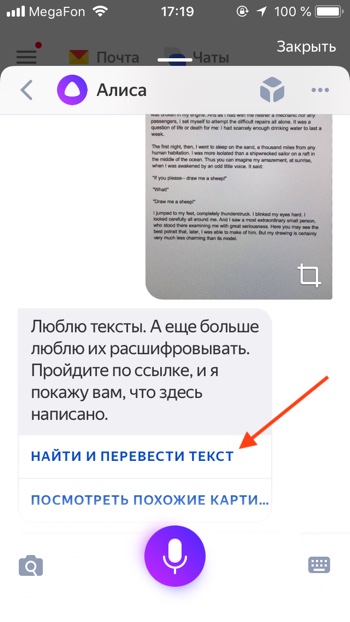
— Прокрутить вниз.
— Нажать «Найти и перевести текст».
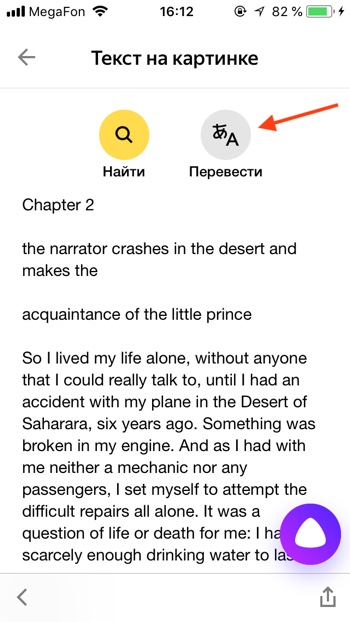
— Откроется распознанный текст. Нажимаем «Перевести».
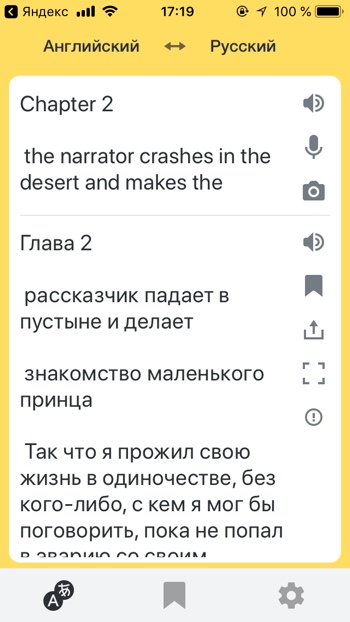
— Откроется Яндекс.Переводчик с переведённым текстом.
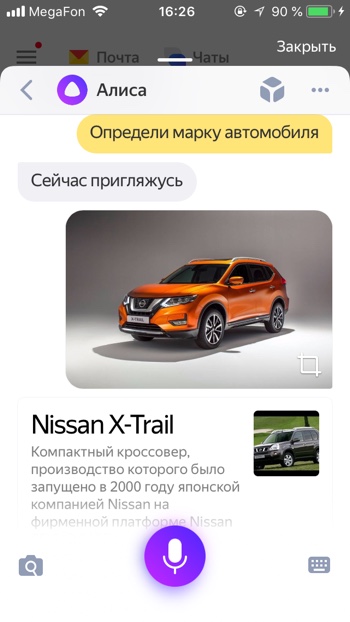
Узнать марку и модель автомобиля
- Определи марку автомобиля
- Распознай модель автомобиля
Алиса умеет определять марки автомобилей. Например, она без труда распознаёт новый автомобиль Nissan X-Trail, в который встроена мультимедийная система Яндекс.Авто с Алисой и Яндекс.Навигатором.
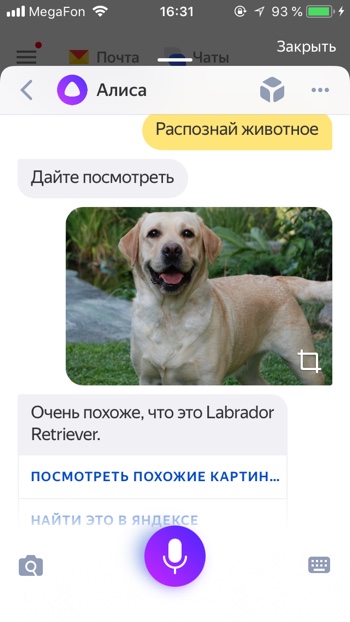
Узнать породу животного
- Распознай животное
- Определи породу собаки
Алиса умеет распознавать животных. Например, Алиса распознала не только, что на фото собака, но и точно определила породу Лабрадор по фото.
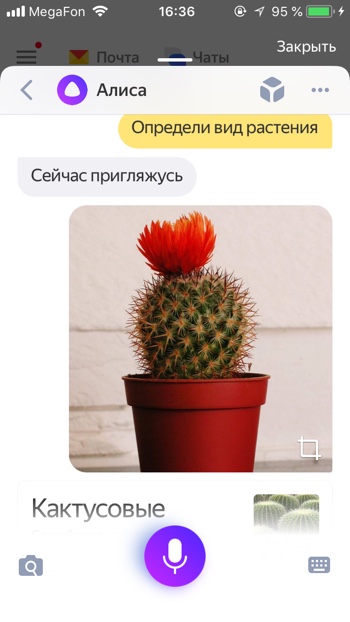
Узнать вид растения
- Определи вид растения
- Распознай растение
Если вы встретили экзотическое растение, Алиса поможет вам узнать его название.
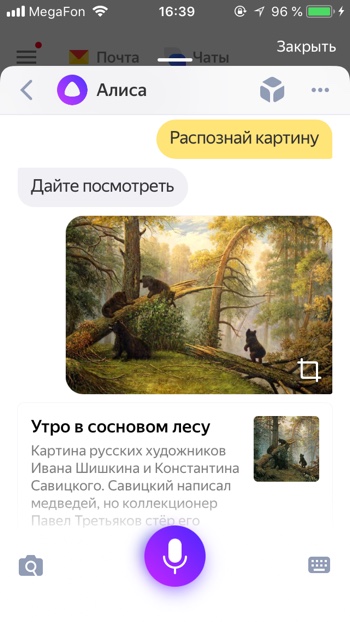
Узнать автора и название картины
- Распознай картину
- Определи что за картина
Если вы увидели картину и хотите узнать её название, автора и описание, просто попросите Алису вам помочь. Картину «Утро в сосновом лесу» художника Ивана Ивановича Шишкина Алиса определяет моментально.
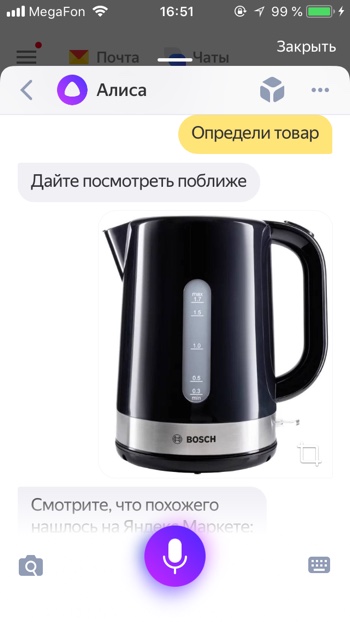
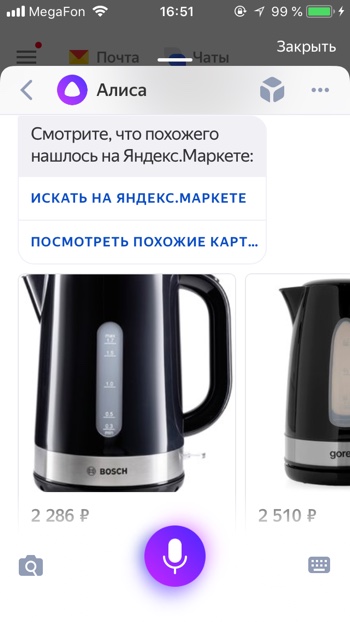
Найти предмет в Яндекс.Маркет
- Определи товар
- Найди товар
Если вы увидите интересный предмет, который вы не прочь были бы приобрести – вы можете попросить Алису найти похожие на него товары. Найденный товар вы можете открыть на Яндекс Маркете и там прочитать его характеристики, или сразу заказать.
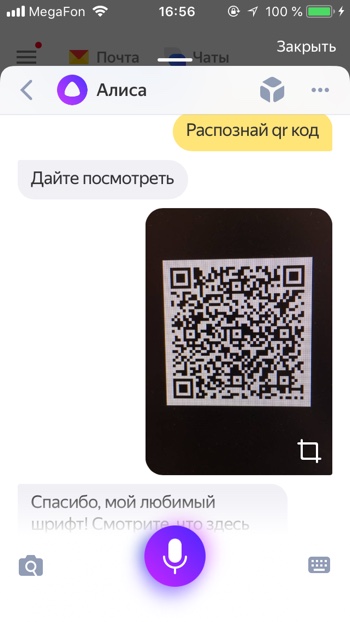
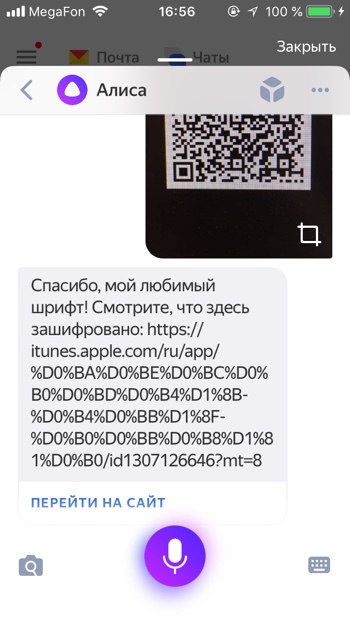
Распознать QR-код
- Определи Кью Эр код
- Распознай Кью Эр код
Алиса пока не так быстро и качественно распознаёт QR коды, нам потребовалось несколько попыток, чтобы успешно распознать QR код.

Попробуйте распознать с помощью Алисы какое-нибудь изображение и напишите о своём опыте и впечатлениях в комментариях.
Яндекс постоянно добавляет новые команды для Алисы. Мы сделали приложение со справкой по командам, которое регулярно обновляем. Установив это приложение, у вас всегда будет под рукой самый актуальный список команд:

Платформа: Android
Цена: Бесплатно

Платформа: iOS
Цена: Бесплатно
Задавайте вопросы в комментариях. Подписывайтесь на  YouTube канал и
YouTube канал и ![]() Telegram канал, чтобы узнавать больше об умных устройствах.
Telegram канал, чтобы узнавать больше об умных устройствах.
Поделиться в соц. сетях
Похожие статьи
Что на картинке: три простых шага, чтобы это узнать
Мы привыкли пользоваться поисковыми системами для того, чтобы найти информацию об интересующем нас предмете по ключевым словам. Но есть и функция для других случаев: когда у вас есть только фото объекта и вам нужно определить, что на нем изображено. Достаточно сделать три простых шага, чтобы понять, что именно изображено на фото. Рассмотрим эту функцию более подробно.
- Когда может понадобиться определить, что на картинке?
- Как воспользоваться функцией?
- Голосовой помощник «Алиса»: ещё проще, ещё удобнее
Случаев, когда может понадобиться определить предмет по его изображению очень много.
- В туристических поездках – узнать название достопримечательности и информацию о ней.
- Определить сорта и виды различных цветов, деревьев и растений.
- Найти понравившуюся мебель, предмет интерьера. Узнать название, производителя, примерную стоимость, а также то, где именно можно купить понравившуюся вещь.
- Определить, что это за животное, птица, рыба.
- Получить развернутую информацию о фильме или клипе по кадру из него.
- Найти схему вязания понравившегося свитера.
- Понять, что за часы на руке у случайного попутчика в метро.
- Распознать текст на фотографии.
- И ещё примерно миллион других поводов воспользоваться функцией определения того, что же именно изображено на фото.
Определить по фото или картинке, что именно на ней изображено, можно одинаково просто и в Google, и в Яндекс. Для каждой из этих поисковых систем можно выделить три основных шага:
- Открыть страницу «Картинки». В Google эта вкладка находится в верхнем правом углу окна браузера. В Яндексе – прямо над окошком поиска.
- Навести курсор на значок фотоаппарата.
- Выбрать файл или указать ссылку на изображение. В Яндекс.Браузере можно просто перетащить фотографию с помощью курсора мыши.
Система сама предложит вам похожие варианты. Например, допустим, что нужно определить сорт розы, изображённой на приведенном ниже фото.

Роза. Сорт неизвестен, а хотелось бы узнать.
Выбираем файл и смотрим, что предлагают поисковые системы.

Скриншот из поисковой системы Google
Google определяет, что именно изображено на картинке – роза. Предоставляет несколько ссылок, которые могут быть связаны с данным изображением и предлагает похожие. Если во всемирной паутине уже есть такие же картинки, Google указывает их размеры.
Теперь посмотрим, что скажет по этому поводу Яндекс.

Скриншот из Яндекс.Картинок
Яндекс также предлагает другие размеры этой картинки. Внизу можно увидеть похожие картинки, а вот информация справа уже интереснее. Здесь не только предполагаемые названия сортов, но и похожие товары на Яндекс.Маркет с актуальными ценами. Очень удобно: сразу можно узнать название, и найти магазин с этим товаром. Если кликнуть по ссылке с названием сорта, то можно попытаться визуально определить, похожи цветы этого сорта на тот, что изображён на исходном фото или нет.
Также есть возможность выбрать фрагмент картинки. Это может пригодиться в тех случаях, когда на фото продемонстрировано сразу несколько объектов, а информация необходима только про один из них.
С помощью голосового помощника «Алиса» от Яндекса можно не только определить, что изображено на уже сохранённой картинке, но и сделать фото того, что вы видите перед собой в данный момент. Для того чтобы воспользоваться функцией поиска по фото, необходимо сделать следующее:
- Открыть голосовой помощник.
- Попросить «Алису» сделать фото и определить, что на нём изображено.
После этого откроется меню камеры и галерея фото. Можно будет либо сделать новое фото объекта, либо выбрать из уже имеющихся.

«Алиса» просит предоставить исходную картинку…
Важно: Убедитесь в том, что голосовому помощнику «Алиса» разрешён доступ к вашей камере и файлам!
- Просмотрите предложенные «Алисой» варианты и выберите то, что вам подходит.

… и предлагает варианты.

Здесь – не только различные сорта роз, но и другие предметы с похожими изображениями. Например, постеры или схемы для вышивания
«Алиса» не только найдёт похожие изображения, но и предложит воспользоваться поиском по картинке. Дальше голосовой помощник перенаправит вас в браузер и выдаст всю имеющуюся в сети информацию о данном изображении.
Если у пользователя нет возможности общаться с «Алисой» голосом, то можно нажать на значок фотоаппарата – он располагается справа от фиолетового микрофона. В результате будут проделаны те же шаги, что и при поиске в браузере.
Функция определения того, что изображено на картинке, ускоряет поиск необходимой информации об объекте. Можно перебирать тысячи похожих картинок в браузере. А можно просто воспользоваться этим удобным изобретением с помощью поисковой системы или голосового помощника «Алиса».
