Уважаемые студенты!
Срочно заказать решение своих задач можно здесь всего за 10 минут.
Как найти обратную матрицу
- Быстрый способ для матриц $2 times 2$
- Пример 1
- Пример 2
- Нахождение с помощью метода Гаусса
- Пример 3
- Пример 4
- Метод союзной матрицы(алгебраические дополнения)
- Пример 5
Обратная матрица обозначается $ A^{-1} $ и существует только для матриц, у которых определитель не равен нулю $ det A neq 0 $.
Быстрый способ для матриц $2 times 2$
Пусть задана матрица $A = begin{pmatrix} a&b\c&d end{pmatrix}$. Для быстрого способа нахождения обратной матрицы необходимо поменять местами элементы стоящие на главной диагонали, а для оставшихся элементов поменять знак на противоположный. Затем каждый элемент разделить матрицы разделить на определитель исходной матрицы. Математическая формула выглядит следующим образом $$A^{-1} = frac{1}{det A} begin{pmatrix} d&-b \ -c&a end{pmatrix} = frac{1}{ad-bc} begin{pmatrix} d&-b \ -c&a end{pmatrix}.$$
| Пример 1 |
| Найти обратную матрицу для $A = begin{pmatrix} 3&4 \ 5&9 end{pmatrix}$. |
| Решение |
|
Первым делом вычисляем определитель и убеждаемся, что он не равен нулю $$det A = begin{vmatrix} 3&4 \ 5&9 end{vmatrix} = 3cdot9 – 4cdot5 = 27 – 20 = 7.$$ Итак, определитель не равен нулю, значит, обратная матрица существует. Продолжаем наш алгоритм. Меняем элементы на главной диагонали местами, а у оставшихся элементов меняем знак на противоположный. $$A^{-1} = frac{1}{7} begin{pmatrix} 9&-4 \ -5&3 end{pmatrix} = begin{pmatrix} frac{9}{7}&frac{-4}{7} \ frac{-5}{7}&frac{3}{7} end{pmatrix}.$$ |
| Ответ |
| $$A^{-1} = begin{pmatrix} frac{9}{7}&frac{-4}{7} \ frac{-5}{7}&frac{3}{7} end{pmatrix}$$ |
| Пример 2 |
| Вычислить обратную матрицу для $A = begin{pmatrix} 2&-1 \ 4&-6 end{pmatrix}$. |
| Решение |
|
Находим определитель $$det A = begin{vmatrix} 2&-1 \ 4&-6 end{vmatrix} = 2cdot(-6) – 4cdot(-1) = -12 + 4 = -8.$$ Меняем местами элементы главной диагонали, а остальным меняем знак на противоположный. Не забываем затем каждый элемент разделить на определитель. $$A^{-1} = frac{1}{-8} begin{pmatrix} -6&1 \ -4&2 end{pmatrix} = begin{pmatrix} frac{-6}{-8}&frac{1}{-8} \ frac{-4}{-8}&frac{2}{-8} end{pmatrix} = begin{pmatrix} frac{3}{4}&-frac{1}{8} \ frac{1}{2}&-frac{1}{4} end{pmatrix}$$ |
| Ответ |
| $$A^{-1} = begin{pmatrix} frac{3}{4}&-frac{1}{8} \ frac{1}{2}&-frac{1}{4} end{pmatrix}$$ |
Нахождение с помощью метода Гаусса
На практике чаще всего метод Гаусса используется как способ нахождения обратной матрицы. Суть метода в том, что к основной матрице добавляется дополнительная единичная матрица с такой же размерностью.
$$ Bigg (begin{matrix} a_{11}&a_{12}&a_{13}\a_{21}&a_{22}&a_{23}\a_{31}&a_{32}&a_{33} end{matrix} Bigg | begin{matrix} 1&0&0\0&1&0\0&0&1 end{matrix} Bigg ) $$
Далее нужно путем простейших элементарных преобразований привести левую матрицу к единичной, а одновременно с ней справа получится обратная матрица:
$$ Bigg (begin{matrix} 1&0&0\0&1&0\0&0&1 end{matrix} Bigg | begin{matrix} b_{11}&b_{12}&b_{13}\b_{21}&b_{22}&b_{23}\b_{31}&b_{32}&b_{33} end{matrix} Bigg ) $$
$$A^{-1} = begin{pmatrix} b_{11}&b_{12}&b_{13}\b_{21}&b_{22}&b_{23}\b_{31}&b_{32}&b_{33} end{pmatrix}$$
| Пример 3 |
| Найти обратную матрицу элементарными преобразованиями $$A = begin{pmatrix} 2&-1&0 \ 0&2&-1 \ -1&-1&1 end{pmatrix}.$$ |
| Решение |
|
Вычисляем определитель матрицы, чтобы убедиться что он не равен нулю $$det A = begin{vmatrix} 2&-1&0 \ 0&2&-1 \ -1&-1&1 end{vmatrix} = 4-1+0-0-2-0=1 neq 0.$$ Выписываем основную матрицу и добавляем справа единичную матрицу. $$begin{pmatrix} 2&-1&0 &|& 1&0&0 \ 0&2&-1 &|& 0&1&0 \ -1&-1&1 &|& 0&0&1 end{pmatrix}$$ Проводим элементарные преобразования над строками матриц таким образом, чтобы слева получилась единичная матрица. В то же время как справа получим обратную матрицу. Умножаем третью строку на 2 и прибавляем первую. $$begin{pmatrix} 2&-1&0 &|& 1&0&0 \ 0&2&-1 &|& 0&1&0 \ 0&-3&2 &|& 1&0&2 end{pmatrix}$$ Умножаем третью строку на 2 и прибавляем к ней вторую строку, умноженную на 3. $$begin{pmatrix} 2&-1&0 &|& 1&0&0 \ 0&2&-1 &|& 0&1&0 \ 0&0&1 &|& 2&3&4 end{pmatrix}$$ Теперь запускаем обратный ход преобразований снизу вверх. Ко второй строке прибавляем третью. $$begin{pmatrix} 2&-1&0 &|& 1&0&0 \ 0&2&0 &|& 2&4&4 \ 0&0&1 &|& 2&3&4 end{pmatrix}$$ Умножаем первую строку на 2 и прибавляем к ней вторую строчку матрицы. $$begin{pmatrix} 4&0&0 &|& 4&4&4 \ 0&2&0 &|& 2&4&4 \ 0&0&1 &|& 2&3&4 end{pmatrix}$$ Теперь, чтобы слева получилась единичная матрица нужно первую строку разделить на 4, вторую на 2. $$begin{pmatrix} 1&0&0 &|& 1&1&1 \ 0&1&0 &|& 1&2&2 \ 0&0&1 &|& 2&3&4 end{pmatrix}$$ Справа как видим получилась обратная матрица $$A^{-1} = begin{pmatrix} 1&1&1 \ 1&2&2 \ 2&3&4 end{pmatrix}.$$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$A^{-1} = begin{pmatrix} 1&1&1 \ 1&2&2 \ 2&3&4 end{pmatrix}$$ |
| Пример 4 |
| Дана матрица, найти обратную $$A = begin{pmatrix} 3&2&1 \ 1&0&2 \ 4&1&3 end{pmatrix}.$$ |
| Решение |
|
Первым делом вычисляем определитель, чтобы убедиться в существовании обратной матрицы $$det A = begin{vmatrix} 3&2&1 \ 1&0&2 \ 4&1&3 end{vmatrix} = 0+16+1-0-6-6=5.$$ Теперь справа от матрицы дописываем единичную матрицу $$begin{pmatrix} 3&2&1 &|& 1&0&0 \ 1&0&2 &|& 0&1&0 \ 4&1&3 &|& 0&0&1 end{pmatrix}.$$ Теперь с помощью элементарных преобразований делаем так, чтобы слева стояла единичная матрица. А справа получим одновременно обратную матрицу. Умножаем вторую строку на 3 и вычитаем из неё первую. Умножаем третью строчку на 3 и вычитаем первую, умноженную на 4. $$begin{pmatrix} 3&2&1 &|& 1&0&0 \ 0&-2&5 &|& -1&3&0 \ 0&-5&5 &|& -4&0&3 end{pmatrix}$$ Умножаем третью строку на 2 и вычитаем вторую, умноженную на 5. $$begin{pmatrix} 3&2&1 &|& 1&0&0 \ 0&-2&5 &|& -1&3&0 \ 0&0&-15 &|& -3&-15&6 end{pmatrix}$$ Третью строку можно разделить на 3, чтобы уменьшить числа для дальнейшего удобства. Сделаем это. $$begin{pmatrix} 3&2&1 &|& 1&0&0 \ 0&-2&5 &|& -1&3&0 \ 0&0&-5 &|& -1&-5&2 end{pmatrix}$$ Начинаем проводить преобразования над строками теперь снизу вверх. Умножаем первую строку на 5 и прибавляем к ней третью. Ко второй строке просто прибавляем третью. $$begin{pmatrix} 15&10&0 &|& 4&-5&2 \ 0&-2&0 &|& -2&-2&2 \ 0&0&-5 &|& -1&-5&2 end{pmatrix}$$ К первой строке прибавляем вторую, умноженную на 5. $$begin{pmatrix} 15&0&0 &|& -6&-15&12 \ 0&-2&0 &|& -2&-2&2 \ 0&0&-5 &|& -1&-5&2 end{pmatrix}$$ Осталось разделить первую строку на 15, вторую на (-2), а третью на (-5). $$begin{pmatrix} 1&0&0 &|& -frac{2}{5}&-1&frac{4}{5} \ 0&1&0 &|& 1&1&-1 \ 0&0&1 &|& frac{1}{5}&1&-frac{2}{5} end{pmatrix}$$ |
| Ответ |
| $$begin{pmatrix} 1&0&0 &|& -frac{2}{5}&-1&frac{4}{5} \ 0&1&0 &|& 1&1&-1 \ 0&0&1 &|& frac{1}{5}&1&-frac{2}{5} end{pmatrix}$$ |
Метод союзной матрицы(алгебраические дополнения)
Формула нахождения обратной матрицы через алгебраические дополнения выглядит следующим образом
$$A^{-1} = frac{1}{|A|} (A^*)^T. $$
Матрица $A^*$ называется союзной (присоединенной) матрицей и представляет собой набор алгебраических дополнений матрицы $ A $:
$$ A^* = begin{pmatrix} A_{11}&A_{12}&A_{13}\A_{21}&A_{22}&A_{23}\A_{31}&A_{22}&A_{33} end{pmatrix}, text{ где } A_{ij}=(-1)^{i+j} M_{ij} $$
$M_{ij} $ называется минором матрицы, который получается путем вычеркивания $ i $-ой строки и $ j $-того столбца из матрицы.
| Пример 5 |
| Найти обратную матрицу методом алгебраических дополнений $$ A = begin{pmatrix} 3&1&2\-1&3&-2\0&-1&4 end{pmatrix} $$ |
| Решение |
|
Итак, пользуемся формулой $ A^{-1} = frac{1}{|A|} (A^*)^T $ Первым делом вычисляем определитель матрицы $ A $, так как необходимым условием существование обратной матрицы является неравенство его к нулю: $$ |A| = begin{vmatrix} 3&1&2\-1&3&-2\0&-1&4 end{vmatrix} = 36 + 0 + 2 – 0 – 6 + 4 = 36 neq 0 $$ Находим алгебраические дополнения матрицы $ A $. Для этого удаляем все элементы стоящие в i-ой строке и в j-ом столбце. Оставшиеся элементы матрицы переписываем в определитель и проводим его вычисление. Вычеркиваем первую строку и первый столбец: $$ A_{11} = (-1)^{1+1} cdot begin{vmatrix} 3&-2\-1&4 end{vmatrix} = 12 – 2 = 10 $$ Убираем первую строку и второй столбец: $$ A_{12} = (-1)^{1+2} cdot begin{vmatrix} -1&-2\0&4 end{vmatrix} = -(-4 – 0) = 4 $$ Оставшиеся алгебраические дополнения находим по аналогии с предыдущими двумя. $$ A_{13} = (-1)^{1+3} cdot begin{vmatrix} -1&3\0&-1 end{vmatrix} = 1 – 0 = 1 $$ $$ A_{21} = (-1)^{2+1} cdot begin{vmatrix} 1&2\-1&4 end{vmatrix} = -(4 + 2) = -6 $$ $$ A_{22} = (-1)^{2+2} cdot begin{vmatrix} 3&2\0&4 end{vmatrix} = 12 – 0 = 12 $$ $$ A_{23} = (-1)^{2+3} cdot begin{vmatrix} 3&1\0&-1 end{vmatrix} = -(-3 – 0) = 3 $$ $$ A_{31} = (-1)^{3+1} cdot begin{vmatrix} 1&2\3&-2 end{vmatrix} = -2 – 6 = -8 $$ $$ A_{32} = (-1)^{3+2} cdot begin{vmatrix} 3&2\-1&-2 end{vmatrix} = -(-6 + 2) = 4 $$ $$ A_{33} = (-1)^{3+3} cdot begin{vmatrix} 3&1\-1&3 end{vmatrix} = 9+1 = 10 $$ Составляем союзную (присоединенную) матрицу $ A^* $ из алгебраических дополнений: $$ A^* = begin{pmatrix} 10&4&1\-6&12&3\-8&4&10 end{pmatrix}. $$ Транспонируем её и обозначаем $ (A^*)^T $: $$ (A^*)^T = begin{pmatrix} 10&-6&-8\4&12&4\1&3&10 end{pmatrix} $$ В итоге находим обратную матрицу $ A^{-1} $: $$ A^{-1} = frac{1}{36} begin{pmatrix} 10&-6&-8\4&12&4\1&3&10 end{pmatrix} $$ Делим каждый элемент матрицы на 36 и получаем следующее: $$begin{pmatrix} frac{5}{18}&-frac{1}{6}&-frac{2}{9}\ frac{1}{9}&frac{1}{3}&frac{1}{9}\frac{1}{36}&frac{1}{12}&frac{5}{18} end{pmatrix}.$$ |
| Ответ |
| $$A^{-1} =begin{pmatrix} frac{5}{18}&-frac{1}{6}&-frac{2}{9}\ frac{1}{9}&frac{1}{3}&frac{1}{9}\frac{1}{36}&frac{1}{12}&frac{5}{18} end{pmatrix}$$ |
Обра́тная ма́трица — такая матрица 



Обратную матрицу можно определить как:

- где
— соответствующая присоединённая матрица,
— определитель матрицы
Из этого определения следует критерий обратимости: матрица обратима тогда и только тогда, когда она невырождена, то есть её определитель не равен нулю. Для неквадратных матриц и вырожденных матриц обратных матриц не существует. Однако возможно обобщить это понятие и ввести псевдообратные матрицы, похожие на обратные по многим свойствам.
Свойства обратной матрицы[править | править код]
Пусть квадратные матрицы 
Способы нахождения обратной матрицы[править | править код]
Если матрица обратима, то для нахождения обратной матрицы можно воспользоваться одним из следующих способов:
Точные (прямые) методы[править | править код]
Метод Жордана—Гаусса[править | править код]
Возьмём две матрицы: саму
При использовании метода Гаусса первая матрица будет умножаться слева на одну из элементарных матриц 


Вторая матрица после применения всех операций станет равна 

С помощью матрицы алгебраических дополнений[править | править код]
Матрица, обратная матрице

- где
— присоединенная матрица (матрица, составленная из алгебраических дополнений для соответствующих элементов транспонированной матрицы).
Сложность алгоритма зависит от сложности 

Использование LU- или LUP-разложения[править | править код]
Матричное уравнение 










Матрицу, обратную к заданной невырожденной матрице
Результатом LUP-разложения матрицы 













В случае использования LU-разложения (
Сложность обоих алгоритмов —
Итерационные методы[править | править код]
Матрицу

Последовательность матриц 


Выбор начального приближения[править | править код]
Проблема выбора начального приближения 












Для метода Ньютона в качестве начального приближения можно выбрать 



Примеры[править | править код]
Матрица 2 × 2[править | править код]
[4]
Обращение матрицы 2 × 2 возможно только при условии, что 
Примечания[править | править код]
- ↑ Кормен Т., Лейзерсон Ч., Ривест Р., Штайн К. Алгоритмы: построение и анализ, — М.: Вильямс, 2006 (с. 700).
- ↑ Petković, M. D. Generalized Schultz iterative methods for the computation of outer inverses (англ.) // Computers & Mathematics with Applications. — 2014. — June (vol. 67, iss. 10). — P. 1837—1847. — doi:10.1016/j.camwa.2014.03.019.
- ↑ Pan, V., Reif, J. Fast and efficient parallel solution of dense linear systems (англ.) // Computers & Mathematics with Applications. — 1989. — Vol. 17, iss. 11. — P. 1481—1491. — doi:10.1016/0898-1221(89)90081-3.
- ↑ Как найти обратную матрицу? mathprofi.ru. Дата обращения: 18 октября 2017. Архивировано 17 октября 2017 года.
Ссылки[править | править код]
- Реализация с полным выбором ведущего элемента на C++
Обра́тная
ма́трица —
такая матрица
(А-1),
что их умножение (с любой стороны) даст
в результате единичную матрицу
![]()
Свойства
обратной матрицы
Способы
нахождения обратной матрицы
-
Нахождение обратной
матрицы с помощью присоединенной
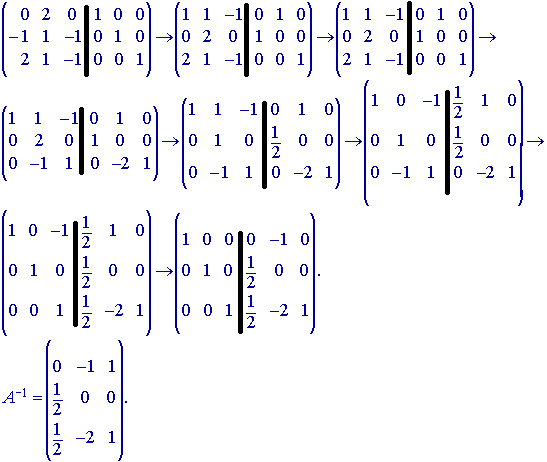
(АǀЕ) ̴ (ЕǀА-1)
Пример.
С помощью элементарных преобразований
строк найти обратную матрицу к матрице
A.
Определитель
равен –2, следовательно существует
обратная матрица. Припишем к исходной
матрице единичную, и будем преобразовывать
матрицу A, к виду единичной матрицы.
Тогда единичная матрица преобразуется
в обратную к матрице A.
-
Нахождение обратной
матрицы по формуле:

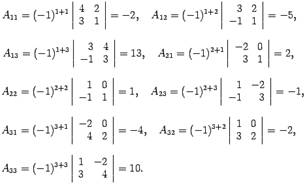
Пример.
Найдите обратную матрицу для
матрицы
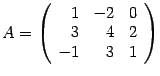
Решение.
Находим определитель

Так
как
![]()
то
матрица А – невырожденная, и обратная
для нее существует. Находим алгебраические
дополнения:
Составляем
обратную матрицу, размещая найденные
алгебраические дополнения так, чтобы
первый индекс соответствовал столбцу,
а второй – строке:
Полученная
матрица и служит ответом к задаче.
Билет 7. Решение систем линейных уравнений с помощью формул Крамера и с помощью обратной матрицы.
АХ=В
Умножим на А-1
обе части уравнения
А-1 * А * Х = А-1
*В
ЕХ = А-1В
Х![]()
= А-1В
5х1 + 10х2 =
4
3х1 – х2 =
1
А
;
В =

;
Х =

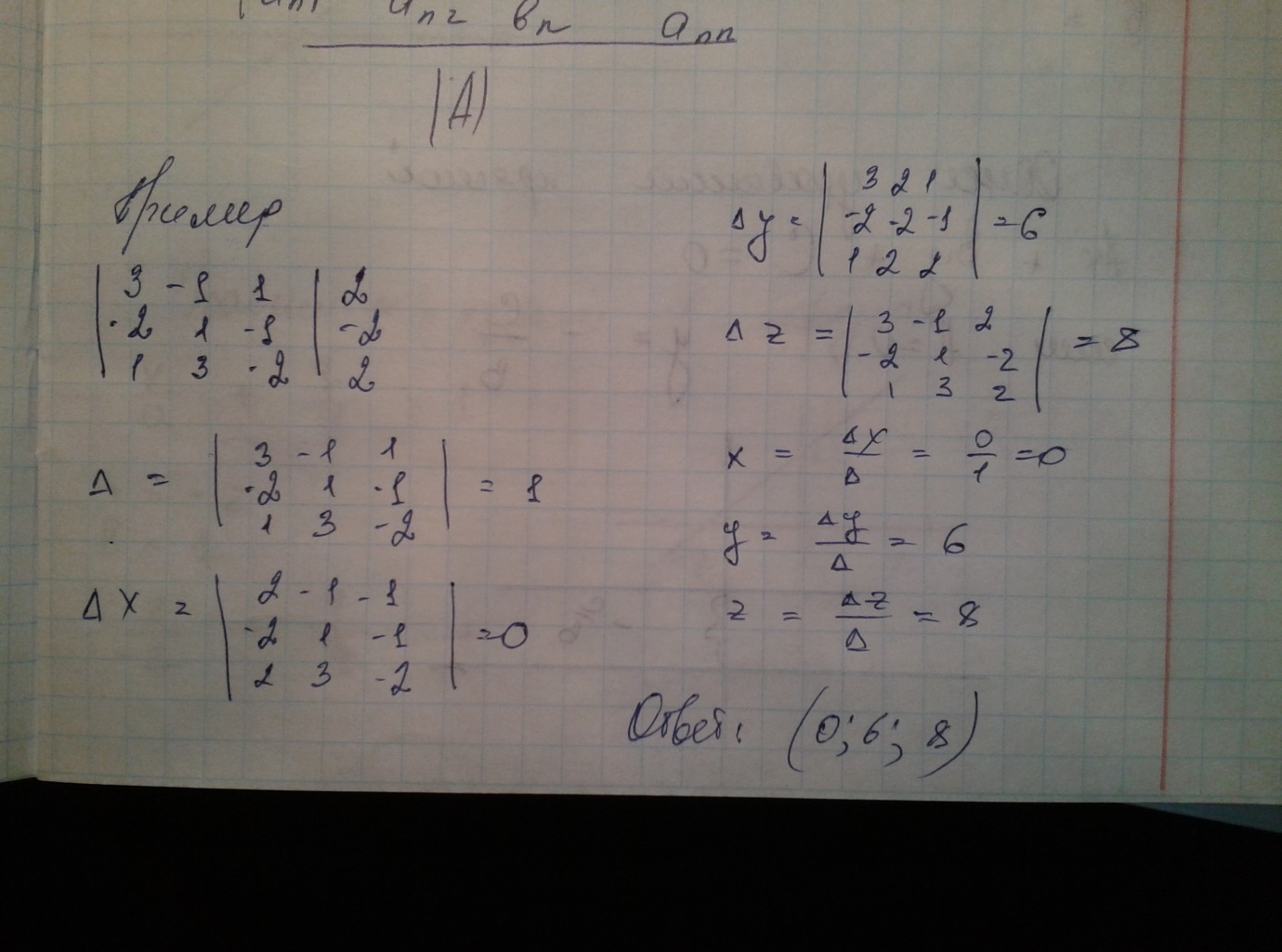
Метод Крамера
(правило Крамера) — способ решения
квадратных систем линейных алгебраических
уравнений (СЛАУ) с ненулевым определителем
основной матрицы (причём для таких
уравнений решение существует и оно
единственно)

Билет 8. Векторы и линейные операции над ними. Арифметическое n-мерное векторное пространство Rn. Геометрический смысл пространств r2 и r1
Вектором называется
направленный отрезок.
Линейными
операциями
называются операции сложения и
вычитания векторов и умножения
вектора на число.
1. Сумма
![]()
векторов
![]()
и
![]()
находится
по правилу
треугольника

или
по правилу
параллелограмма

— эти
правила равносильны.
Сложение
векторов
коммутативно и ассоциативно:
![]()
![]()
2.
Разность векторов
![]()
можно
определить как сумму
![]()
,
т. е. вычитание заменяется прибавлением
противоположного вектора.
Удобно
также правило
треугольника:
векторы
и
откладывают
от общего начала, тогда разность
есть
вектор, начало которого совпадает с
концом
,
а конец — с концом

3.
Произведением
![]()
(или ![]()
)
вектора
на
действительное число λ называется
вектор
,
коллинеарный вектору
,
имеющий длину, равную
![]()
,
и то же направление, что и вектор
,
если λ >
0, и направление, противоположное
направлению вектора
,
если λ <
0.
Так, например,
![]()
есть
вектор, имеющий то же направление, что
и вектор
,
а длину, вдвое большую, чем вектор
(рис.
108).
В
случае, когда λ = 0 или
![]()
,
произведение
представляет
собой нулевой вектор.
Противоположный
вектор
![]()
можно
рассматривать как результат умножения
вектора
на
λ = -1:
![]()
.
Очевидно, что
![]()
.
Множество
всех векторов размерности n называется
арифметическим n-мерным векторным
пространством и обозначается Rn.
Геометрический смысл
имеют лишь пространства R1, R2, R3 . Для R1 –
это прямая, для R2 – плоскость, для R3 –
трехмерное пространство.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Для того что бы найти обратную матрицу можно использовать два метода: с помощью алгебраических дополнений (метод присоединённой (союзной) матрицы) или элементарных преобразований (метод Жордано-Гаусса).
Рассмотрим как найти обратную матрицу с помощью элементарных преобразований.
Обратной матрицей называется матрицы A-1 при умножении на исходную матрицу A получается единичная матрица E.
A·A-1 = A-1 · A = E
Алгоритм нахождения обратной матрицы с помощью элементарных преобразований:
- Найти определитель (детерминант) матрицы A. Если определитель ≠ 0, то обратная матрица существует. Если определитель = 0, то обратная матрица не существует.
- Дописываем справа единичную матрицу
- Делаем прямой ход. Обнуляем все элементы (с помощью элементарных преобразований) левой матрицы стоящей под ее главной диагонали.
- Делаем обратный ход. Обнуляем все элементы (с помощью элементарных преобразований) левой матрицы стоящей над ее главной диагонали.
- Элементы главной диагонали левой матрицы, преобразуем в единицы.
Пример
Рассмотрим данный метод на примере. Дана матрицы 3х3:
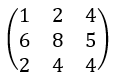
Найдем определитель (детерминант) матрицы, detA = 8 обратная матрица существует.
Допишем к нашей матрице слева единичную матрицу.
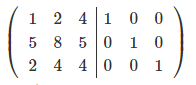
Чтобы сделать нули под элементом a11, вычтем 1-ую строку из всех строк, что расположены ниже её, при чём, для того, чтобы работать с меньшими числами, поделим каждую из этих строк на a11.
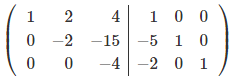
Чтобы сделать нули над элементом a33, вычтем 3-ую строку с всех строк, что расположены выше её, при чём, для того, чтобы работать с меньшими числами, поделим каждую из этих строк на a33.
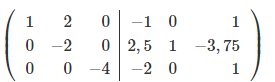
Чтобы сделать нули над элементом a22, вычтем 2-ую строку с всех строк, что расположены выше её, при чём, для того, чтобы работать с меньшими числами, поделим каждую из этих строк на a22.
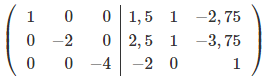
Поделим каждую строку на элемент, который стоит на главной диагонали.
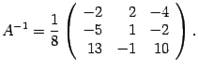
Вот мы и нашли обратную матрицу.
Обратная матрица.
Навигация по странице:
- Определение обратной матрицы
- Свойства обратной матрицы
- Методы вычисления обратной матрицы
- Вычисления обратной матрицы с помощью присоединённой матрицы
- Вычисления обратной матрицы с помощью союзной матрицы
Определение.
Обратная матрица A−1 — матрица, произведение которой на исходную матрицу A равно единичной матрице E:
A·A-1 = A-1·A = E
Замечание.
Обратная матрица существует только для квадратных матриц определитель которых не равен нулю.
Свойства обратной матрицы
| ● | |
| ● | (A·B)-1 = A-1·B-1 |
| ● | (A-1)T = (AT)-1 |
| ● | |
| ● | (A-1)-1 = A |
Методы вычисления обратной матрицы
Вычисление обратной матрицы с помощью присоединённой матрицы
Теорема.
Если справа к квадратной матрице дописать единичную матрицу того же порядка и с помощью элементарных преобразований над строками преобразовать полученную матрицу так, чтобы начальная матрица стала единичной, то матрица полученная из единичной будет обратной матрицей к исходной.
Замечание.
Если при преобразованиях в левой части матрицы образуется нулевая строка (столбец), то исходная матрица не имеет обратной матрицы.
Вычисление обратной матрицы с помощью союзной матрицы
Определение.
Матрица Ã, элементы которой равны алгебраическим дополнениям соответствующих элементов матрицы A называется союзной матрицей.
Пример 1.
Найти обратную матрицу матрицы A
| A = | 2 | 4 | 1 | ||
| 0 | 2 | 1 | |||
| 2 | 1 | 1 |
Решение: Найдем определитель матрицы A:
| det(A) = | 2 | 4 | 1 | = |
| 0 | 2 | 1 | ||
| 2 | 1 | 1 |
= 2·2·1 + 4·1·2 + 1·0·1 – 1·2·2 – 2·1·1 – 4·0·1 = 4 + 8 + 0 – 4 – 2 – 0 = 6
Найдем алгебраические дополнения матрицы A:
| A11 = (-1)1 + 1· | 2 | 1 | = 2·1 – 1·1 = 1 |
| 1 | 1 |
| A12 = (-1)1 + 2· | 0 | 1 | = -(0·1 – 1·2) = 2 |
| 2 | 1 |
| A13 = (-1)1 + 3· | 0 | 2 | = 0·1 – 2·2 = -4 |
| 2 | 1 |
| A21 = (-1)2 + 1· | 4 | 1 | = -(4·1 – 1·1) = -3 |
| 1 | 1 |
| A22 = (-1)2 + 2· | 2 | 1 | = 2·1 – 1·2 = 0 |
| 2 | 1 |
| A23 = (-1)2 + 3· | 2 | 4 | = -(2·1 – 4·2) = 6 |
| 2 | 1 |
| A31 = (-1)3 + 1· | 4 | 1 | = 4·1 – 1·2 = 2 |
| 2 | 1 |
| A32 = (-1)3 + 2· | 2 | 1 | = -(2·1 – 1·0) = -2 |
| 0 | 1 |
| A33 = (-1)3 + 3· | 2 | 4 | = 2·2 – 4·0 = 4 |
| 0 | 2 |
Запишем союзную матрицу:
| Ã = | 1 | 2 | -4 | ||
| -3 | 0 | 6 | |||
| 2 | -2 | 4 |
Найдем обратную матрицу:
| Ответ: A-1 = | 1/6 | -1/2 | 1/3 | ||
| 1/3 | 0 | -1/3 | |||
| -2/3 | 1 | 2/3 |
