Как
и в общем случае исследования системы
неоднородных
линейных уравнений, использование
теоремы
Кронекера–Капелли в частном случае
исследования системы линейных однородных
уравнений также плодотворно. Общая
схема решения:
A1*:
Вычисляем
![]() :
:
ранг матрицы
![]() .
.
Так
как для однородной системы уравнений
![]() =
=![]() ,
,
то всегда выполняется
![]()
![]()
![]() .
.
Однородная система уравнений всегда
совместна. Пусть
![]() =
=![]() .
.
Это значит, что определён базовый
минор:
M![]()
матрицы
![]() .
.
A2*:
В системе уравнений оставляем только
те
![]()
уравнения-строки, которые попали
в базовый минор:
остальные являются следствием выделенных.
A3*:
В левой части каждого из оставшихся для
дальнейшего решения уравнений оставляем
те
![]()
столбцов с неизвестными, которые попали
в базовый минор:
остальные неизвестные объявляем
свободными
и соответствующие столбцы с ними
переносим в правую часть.
A4*:
Находим решения преобразованной системы
уравнений, применяя формулы Крамера:
определитель
преобразованной системы не
равен нулю!
A5*:
Полученное решение системы называют
общим:
вычисленные по формулам Крамера
неизвестные выражаются
через свободные
неизвестные. Присваивая свободным
неизвестным произвольные значения,
получаем частные
решения.
Замечание:
отметим ещё раз, что свободных неизвестных
![]() :
:
их можно воспринимать как число степеней
свободы процесса; вычисляемых неизвестных
–
![]() .
.
☺☺
Пример
8–04:
Исследовать систему уравнений:

Найти общее решение и одно частное.
Решение:
1). Составим матрицу:
![]() =
= и найдём её ранг. Выделим для окаймления
и найдём её ранг. Выделим для окаймления
минор (не равен нулю), расположенный в
правом верхнем углу матрицы:
-
3
4
1
2
6
8
2
5
1
9
12
3
10
2
1
3). Окаймляющие
миноры будем обозначать:
![]() ,
,
где![]() –
–
указывает номер отмеченной для окаймления
строки,![]() –
–
указывает номер отмеченного для
окаймления столбца. Тогда можем записать:
![]() =
= =4·
=4·![]() –8·
–8·![]() +12·
+12·![]() =m1·(5)–h1·(4)+g1·(1)=4·(5)–8·(4)+12·(1)
=m1·(5)–h1·(4)+g1·(1)=4·(5)–8·(4)+12·(1)
=0;
Замечание:
параметры: m1,
h1,
g1
изменяются при переходе к минорам
![]() ,
,![]() ,
,
числа:(5),
(4),
(1)
не
изменяются. Это позволяет применить
единый шаблон вычислений!
![]() =
= =
=
m2·(5)–h2·(4)+g2·(1)=
3·(5)–6·(4)+9·(1)
=0;
4).
Так как все миноры 3-го порядка
оказались равными нулю, то
![]() =2.
=2.
5). Учитывая
расположение не равного нулю минора,
3-е уравнение отбрасываем и свободными
неизвестными объявляем
![]() и
и![]() :
:

далее применяем
правило Крамера:
![]() =1;
=1; ![]() =
=
![]() =
=![]() ;
;
![]() =
=![]() =0.
=0.
6). Общее решение
системы:
![]() =
=![]() =
=![]() ;
;
![]() =
=![]() =0;
=0;
частное решение получим при значениях:![]() =1,
=1,![]() =–1,
=–1,
→![]() =1,
=1,![]() =0.
=0.
Ответ:
общее решение:![]() =
=![]() =
=![]() ;
;
![]() =
=![]() =0;
=0;
частное решение: (1,–1,1,0).
Пример
8–05:
Исследовать
систему уравнений:

Найти
общее и частное решение.
Решение:
1). Применим пошаговый
процесс метода Гаусса:
-
4
-3
2
-1
1
–1
-1
2
3
-2
1
-3
1
–1
1
2
2
-1
0
-5
=(1)→
1
-1
1
2
=(2)→
5
-3
1
-8
1
0
-1
-7
-
1
–1
-1
2
1
0
0
-7
0
0
-2
0
0
0
1
0
0
0
-2
0
=(3)→
0
0
0
0
=(4)→
0
1
0
–9
0
1
0
–9
Выполнены
операции:
(1):
[R4]–[R1];
[R1]–[R2];
[R2]–[R3];
[R3]–[R4].
(2):
[R2]–[R1];
[R3]–[R1];
[R4]–[R1].
(3):
[R3]–[R1];
[R2]
делим на (–2); [R1]–[R2];
[R1]–[R4].
(4):
раскрываем
полученный результат.
2).
Видим:
![]() =3.
=3.
Свободной неизвестной объявляем![]() =
=![]() .
.
3). Из уравнения-строки
[R4] запишем:![]() =9
=9![]() ;
;
из строки [R2]:![]() =0;
=0;
[R4] запишем:![]() =7
=7![]() .
.
Произвольная величина![]() определяет бесчисленное множество
определяет бесчисленное множество
решений заданного уравнения.
Ответ: общее
решение: (7![]() ;9
;9![]() ;0;
;0;![]() )=
)=![]() (7,9,
(7,9,
0;1).
Замечание:
видим,
что и применение фундаментальных
результатов теоремы Кронекера-Капелли
не продвинуло нас в понимании системы
решений
системы ЛОУ!
☻
Соседние файлы в папке ЛА и АГ пособие
- #
- #
- #
- #
- #
- #
- #
- #
Структура общего решения системы уравнений
Однородная система линейных уравнений
или
всегда совместна, так как имеет тривиальное решение . Если ранг матрицы системы равен количеству неизвестных
, то тривиальное решение единственное. Предположим, что
. Тогда однородная система имеет бесконечно много решений. Заметим, что расширенная матрица
однородной системы при элементарных преобразованиях строк приводится к упрощенному виду
, т.е.
. Поэтому из (5.11) получаем общее решение однородной системы уравнений:
(5.13)
Получим другую форму записи решений однородной системы, которая раскрывает структуру множества решений. Для этого подчеркнем следующие свойства.
Свойства решений однородной системы уравнений
1. Если столбцы — решения однородной системы уравнений, то любая их линейная комбинация
также является решением однородной системы.
В самом деле, из равенств следует, что
т.е. линейная комбинация решений является решением однородной системы.
2. Если ранг матрицы однородной системы равен , то система имеет
линейно независимых решений.
Действительно, по формулам (5.13) общего решения однородной системы найдем частных решений
, придавая свободным переменным следующие стандартные наборы значений (всякий раз полагая, что одна из свободных переменных равна единице, а остальные — равны нулю):
Получим решений
которые линейно независимы. В самом деле, если из этих столбцов составить матрицу, то последние ее строк образуют единичную матрицу. Следовательно, минор, расположенный в последних
строках не равен нулю (он равен единице), т.е. является базисным. Поэтому ранг матрицы будет равен
. Значит, все столбцы этой матрицы линейно независимы (см. теорему 3.4).
Любая совокупность линейно независимых решений
однородной системы называется фундаментальной системой (совокупностью) решений.
Заметим, что фундаментальная система решений определяется неоднозначно. Однородная система может иметь разные фундаментальные системы решений, состоящие из одного и того же количества линейно независимых решений.
Теорема 5.3 об общем решении однородной системы. Если — фундаментальная система решений однородной системы уравнений (5.4), то столбец
(5.14)
при любых значениях произвольных постоянных также является решением системы (5.4), и, наоборот, для каждого решения х этой системы найдутся такие значения произвольных постоянных
, при которых это решение
удовлетворяет равенству (5.14).
Прямое утверждение теоремы следует из свойства 1 решений однородной системы. Докажем обратное утверждение о том, что любое решение можно представить в виде (5.14). Для этого составим матрицу
, приписав к столбцам фундаментальной системы решений столбец
Найдем ранг этой матрицы. Так как первые столбцов линейно независимы, то
. Так как каждый из столбцов матрицы
является решением системы
, то по первой формуле из (5.13) получаем
Следовательно, первая строка матрицы является линейной комбинацией последних
строк этой матрицы.
По второй формуле из (5.13) получим, что вторая строка матрицы является линейной комбинацией последних
строк этой матрицы, и т.д. По r-й формуле из (5.13) получим, что r-я строка матрицы
является линейной комбинацией последних
строк этой матрицы. Значит, первые
строк матрицы
можно вычеркнуть и при этом ранг матрицы не изменится. Следовательно,
, так как после вычеркивания в матрице
будет всего
строк. Таким образом,
. Значит, есть базисный минор матрицы
, который расположен в первых
ее столбцах, а столбец
не входит в этот базисный минор. Тогда по теореме о базисном миноре найдутся такие числа
, что
Итак, обратное утверждение доказано.
Алгоритм решения однородной системы уравнений
1-5. Выполнить первые 5 пунктов алгоритма Гаусса. При этом не требуется выяснять совместность системы, так как любая однородная система имеет решение (пункт 3 метода Гаусса следует пропустить). Получить формулы (5.11) общего решения, которые для однородной системы будут иметь вид (5.13).
Если ранг матрицы системы равен числу
неизвестных
, то система имеет единственное тривиальное решение
и процесс решения заканчивается.
Если ранг матрицы системы меньше числа неизвестных , то система имеет бесконечно много решений. Структуру множества решений находим в следующих пунктах алгоритма.
6. Найти фундаментальную систему решений однородной системы. Для этого подставить в (5.13) последовательно
стандартных наборов значений свободных переменных, в которых все свободные переменные равны нулю, кроме одной, равной единице (см. свойство 2 решений однородной системы).
7. Записать общее решение однородной системы по формуле (5.14).
Замечания 5.3
1. В пункте 6 алгоритма вместо стандартного набора значений свободных переменных можно использовать и другие наборы значений, лишь бы они обеспечивали линейную независимость получаемых частных решений однородной системы.
2. Матрица столбцы которой образуют фундаментальную систему решений однородной системы, называется фундаментальной. Используя фундаментальную матрицу, общее решение (5.14) однородной системы можно записать в виде
, где
— столбец произвольных постоянных.
3. Если базисный минор матрицы расположен в левом верхнем углу (в первых
строках и первых
столбцах), то упрощенный вид расширенной матрицы (5.9) однородной системы можно представить в виде блочной матрицы
Тогда блочная матрица размеров
является фундаментальной. В этом можно убедиться, используя стандартные наборы значений свободных переменных. Применение блочных матриц может служить вторым способом нахождения фундаментальной системы решений.
Пример 5.4. Найти фундаментальную систему решений и общее решение однородной системы
Решение. 1. Составляем расширенную матрицу системы
2-4. Используя элементарные преобразования над строками матрицы , приводим ее к ступенчатому, а затем и к упрощенному виду (см. решение примера 5.3):
Пункт 3 метода Гаусса пропускаем.
5. Переменные — базисные, а
— свободные. Записываем формулу (5.13) общего решения однородной системы
6. Находим фундаментальную систему решений. Так как и
, надо подобрать
линейно независимых решения. Подставляем в систему стандартные наборы значений свободных переменных:
1) если , то
;
2) если , то
.
В результате получили фундаментальную систему решений
7. Записываем общее решение однородной системы по формуле (5.14):
Заметим, что фундаментальную систему решений можно получить, взяв иные наборы значений свободных переменных. Например, и
. Тогда получим другую фундаментальную систему решений
и общее решение системы
Несмотря на различия, обе формулы задают одно и то же множество решений.
Структура общего решения неоднородной системы уравнений
Ранее была выведена формула (5.11) общего решения системы линейных уравнений. Получим другую форму записи, отражающую структуру множества решений.
Рассмотрим неоднородную систему и соответствующую ей однородную систему
. Между решениями этих систем имеются связи, выражающиеся следующими свойствами.
Свойства решений неоднородной системы уравнений
1. Разность двух решений и
неоднородной системы есть решение однородной системы.
Действительно, из равенств и
следует, что
.
2. Пусть — решение неоднородной системы. Тогда любое решение
неоднородной системы можно представить в виде
, где
— решение однородной системы.
В самом деле, для любого решения неоднородной системы разность
по свойству 1 является решением однородной системы, т.е.
— решение однородной системы.
Теорема 5.4 о структуре общего решения неоднородной системы.
Пусть — решение неоднородной системы, а
— фундаментальная система решений соответствующей однородной системы уравнений. Тогда столбец
(5.15)
при любых значениях [i]произвольных постоянных является решением неоднородной системы, и, наоборот, для каждого решения
этой системы найдутся такие значения произвольных постоянных
, при которых это решение
удовлетворяет равенству (5.15).[/i]
Говорят, что общее решение неоднородной системы есть сумма частного решения неоднородной системы и общего решения соответствующей однородной системы.
Доказательство теоремы вытекает из свойств 1, 2 и теоремы 5.3.
Алгоритм решения неоднородной системы уравнений
1-5. Выполнить первые 5 пунктов метода Гаусса решения системы уравнений и получить формулу общего решения неоднородной системы вида (5.11).
6. Найти частное решение неоднородной системы, положив в (5.11) все свободные переменные равными нулю.
7. Записав формулы (5.13) общего решения соответствующей однородной системы, составить фундаментальную систему ее решений. Для этого подставить в (5.13) последовательно
стандартных наборов значений свободных переменных, в которых все переменные равны нулю, за исключением одной, равной единице.
8. Записать общее решение неоднородной системы по формуле (5.15).
Замечания 5.4
1. Используя фундаментальную матрицу однородной системы
, решение неоднородной системы
можно представить в виде
где — частное решение неоднородной системы, а
— столбец произвольных постоянных.
2. Если базисный минор матрицы расположен в левом верхнем углу (в первых
строках и первых
столбцах), то упрощенный вид расширенной матрицы (5.9) неоднородной системы можно представить в виде блочной матрицы
Тогда блочная матрица оказывается фундаментальной (см. п.3 замечаний 5.3), а столбец
является частным решением неоднородной системы (в этом можно убедиться, подставляя в (5.11) нулевой набор свободных переменных). Используя блочные матрицы, общее решение (5 15) неоднородной системы можно представить в виде
(5.16)
где — столбец произвольных постоянных. Полученную формулу можно считать вторым способом решения неоднородной системы.
Пример 5.5. Найти структуру (5.15) общего решения неоднородной системы
Решение. 1-5. Первые 5 пунктов метода Гаусса выполнены при решении примера 5.3, где получены формулы общего решения неоднородной системы:
Переменные — базисные, а
— свободные.
6. Полагая , получаем частное решение неоднородной системы
.
7. Находим фундаментальную систему решений однородной системы (см. пример 5.4):
8. Записываем по формуле (5.15) общее решение неоднородной системы
Искомая структура множества решений найдена.
Получим формулу общего решения вторым способом, используя п.2 замечаний 5.4. При решении примера 5.3 расширенная матрица системы была приведена к упрощенному виду. Разбиваем ее на блоки:
Записываем частное решение неоднородной системы
и составляем фундаментальную матрицу:
По формуле (5.16) получаем общее решение неоднородной системы, которое преобразуем к виду (5.15):
которое совпадает с ранее полученным.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Система линейных уравнений. Общее решение
Система линейных уравнений (СЛУ) может быть записана в виде
|
|
(1) |
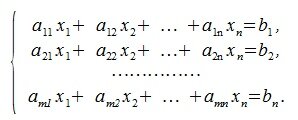
где m, n натуральные числа, aij (i=1,2, …m, j=1,2,…n) называются коэффициентами, bi (i=1,2,…m) называются свободными членами, xi (i=1,2,…n) называются неизвестными.
Систему линейных уравнений (1) можно записать в виде
где A матрица порядка m×n , x – вектор порядка n (x∈Rn), b – вектор порядка m (b∈Rm).
Решением системы (2) называется выбор такого вектора x’, что выполнено равенство
Ax’≡b.
Если система линейных уравнений имеет хотя бы одно решение, то СЛУ называется совместным.
Если СЛУ не имеет решения, то СЛУ называется несовместным.
Если СЛУ имеет единственное решение, то СЛУ называется определенным.
Если СЛУ имеет более одного решения, то СЛУ называется неопределенным.
Система линейных уравнений (2) называется неоднородной cистемой линейных уравнений, если b≠0.
Система линейных уравнений (2) называется однородной cистемой линейных уравнений, если b=0.
Нахождение общего решения системы линейных уравнений
Общее решение системы линейных уравнений (1)((или (2))− это множество всех решений этой системы.
Пусть A m×n – матрица rankA=r. В общем случае можем предположить что r<n, r<m. Тогда r столбцов матрицы A линейно независимы. Для удобства записи предположим, что это первые r столбцы матрицы A. Запишем систему (2) в блочном виде:
|
|
(3) |
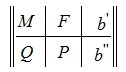
где M – r×r – матрица, Q -m-r×r – матрица, F – n-r×r – матрица, P – m-r×n-r – матрица, 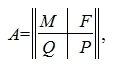
 .
.
Применяя метод исключения Гаусса для системы (3), получим:
|
|
(4) |
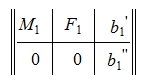
где M1 верхняя треугольная матрица, 0 – нулевые матрицы соответствующих порядков. Далее, применяя обратный ход исключения Гаусса, и, далее, разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует) получим:
|
|
(5) |

где E – единичная матрица порядка r×r.
Запишем (5) в виде системы линейных уравнений:
|
|
(6) |
где 
Решим систему линейных уравнений (6). Для этого перезапишем в следующем виде:
|
|
(7) |
Из второго уравнения системы (7) следует, что для совместности системы (6) и, следовательно, (2) (или (1)) должно выполняться условие b2”≡ 0. Если система совместна, то решаем первое уравнение системы (7) относительно вектора xr:
 |
(8) |
Таким образом первые r координаты вектора x  выражены через остальные координаты
выражены через остальные координаты  . – свободные координаты, т.е. могут принимать любые значения.
. – свободные координаты, т.е. могут принимать любые значения.
Найдем, далее, множество всех векторов x, удовлетворяющих уравнению (6) и, следовательно, (2)( или (1)).
Рассмотрим множество всех векторов х, удовлетворяющих условию
 |
(9) |
где λ – произвольный вектор-столбец длины n-r.
Подставляя (9) в (6) получим:
Следовательно (9) является решением системы (6) и, следовательно, (2)(или (1)). Отметим что вектор  является частным решением неоднородной системы линейных уравнений Ax=b, а
является частным решением неоднородной системы линейных уравнений Ax=b, а  является общим решением однородной системы линейных уравнений Ax=0;
является общим решением однородной системы линейных уравнений Ax=0;
Нахождение общего решения системы линейных уравнений с помощью псевдообратной матрицы
Обозначим через R(A) пространство столбцов матрицы A, т.е.
R(A)={z: z=Ax, ∀x∈Rn}.
1. Пусть A n×n матрица и rank(A)=n. Тогда существует обратная к A матрица A-1, и следовательно единственное решение СЛУ (2) примет вид:
x’=A−1b.
(10)
Действительно, подставляя (3) в (2) имеем:
Ax’=AA−1b=Eb=b,
где E − единичная матрица.
2. Пусть A m×n − матрица, rank(A)=r.
Вычислим следующий вектор:
x’=A+b.
(11)
где A+ – псевдообратная к A матрица.
Подставляя (11) в (2), имеем:
AA+b=b.
(12)
Из равенства (12) следует, что для того, чтобы система линейных уравнений (2) имела решение, должно выполняться условие
b∈R(A).
Если СЛУ совместна, т.е. если AA+b=b, то x’=A+b является решением СЛУ (2).
Общее решение системы линейных уравнений является суммой частного решения неоднородной системы линейных уравнений и множества всех решений соответствующей однородной системы линейных уравнений.
Общее решение системы линейных уравнений (2) имеет следующий вид:
| x=x*+(E−A+A)z, ∀z∈Rn. | (13) |
где x* – один из решений неоднородной системы (2) (например (4)), (E−A+A) образует ядро (нуль пространство) матрицы A.
Сделаем скелетное разложение матрицы (E−A+A):
E−A+A=Q·S
где Q n×n−r – матрица rank(Q)=n−r, S n−r×n-матрица rank(S)=n−r.
Тогда (13) можно записать в следующем виде:
x=x*+Q·k, ∀k∈Rn-r.
где k=Sz.
Итак, процедура нахождения общего решения системы линейных уравнений с помощью псевдообратной матрицы можно представить в следующем виде:
- Вычисляем псевдообратную матрицу A+.
- Вычисляем частное решение неоднородной системы линейных уравнений (2): x*=A+b.
- Проверяем совместность системы. Для этого вычисляем AA+b. Если AA+b≠b, то система несовместна. В противном случае продолжаем процедуру.
- Высисляем E−A+A.
- Делаем скелетное разложение E−A+A=Q·S.
- Строим решение
x=x*+Q·k, ∀k∈Rn-r.
Решение системы линейных уравнений онлайн
Онлайн калькулятор позволяет найти обшее решение системы линейных уравнений с подробными объяснениями.
Фундаментальное решение системы линейных уравнений. Взгляд со стороны
Время на прочтение
2 мин
Количество просмотров 9.8K
Добрый день!
В данной статье я попробую взглянуть по новому на алгоритм поиска общего решения системы линейных уравнений.
Задача, которой мы займемся звучит так.
Найти общее решение следующей системы уравнений

Такую задачу решают, приведя исходную систему к треугольному виду по методике Гаусса. Потом выбрав свободные переменные вычисляют общее решение.
Я хочу показать, как можно решать подобные системы другим способом. Насколько она известна и применяется где либо, я узнать не смог. Во всех публичных/популярных материалах, используется метод Гаусса.
Сразу скажу что решение конечно же не оптимально (по быстродействию), так как при вычислении векторного произведения, надо вычислять определитель матрицы, а это так или иначе вычисление треугольной матрицы.
Но решение красиво и наглядно, кроме этого легко видеть критерий при котором система не имеет решений.
В чем же суть методики?

Решая эту систему как произведение двух векторов, мы получим
i%20+%20(%201%20)j%20+%20(%207%20)k)
А следовательно, корни системы равны

Для тех кто не верит, это легко проверяется подстановкой
Используем этот прием и рассмотрим, как же решаются такие системы с помощью векторных произведений.
Итак, у нас есть исходная система
Перенесем свободные члены в левую часть

У нас получилось 6 столбцов.
На этом этапе не будем вводить новых сущностей и не используем в своей работе понятия ранга матрицы. (Прошу отнестись снисходительно)
Мы просто видим что уравнений 3, а переменных 5-ть. Следовательно общее решение будет использовать 5-3=2 независимых переменных.
На этом же шаге, мы можем определить, какие же из переменных будут свободными. Возьмем две переменных, которые будут правее всех, и назначим их свободными.
Note: Для других уравнений не всегда получается, что надо брать именно последние правые коэффициенты

А теперь за три шага определяем фундаментальное решение исходной системы
Шаг 1. Здесь последняя колонка это свободные члены системы
i%20+%20(%20-162%20)j%20+%20(%20-486%20)k%20+%20(%20-81%20)l)
Шаг 2. Здесь последняя колонка это коэффициенты при переменной 
i%20+%20(%20162%20)j%20+%20(%20405%20)k%20+%20(%20-81%20)l)
Шаг 3. Здесь последняя колонка это коэффициенты при переменной 
i%20+%20(%20243%20)j%20+%20(%20324%20)k%20+%20(%20-81%20)l)
Нет необходимости подробно рассказывать откуда мы берем данные. Я думаю для читающих это очевидно. (Кто решал систему уравнений методом Крамера, найдут общие черты)
Интереснее то, что мы с этими «векторами» делать будем.
Разделим их на -81
получаем следующие три вектора



выстроим их в вертикаль и таким образом фундаментальное решение принимает вид

Великолепно! Не правда ли…
Для критерия разрешимости заданной системы уравнений в большинстве случаев используется правило Кронекера-Копелли, здесь же просто анализируется результат векторного произведения.
Если результирующий вектор имеет вид

где  , а среди всех оставшихся есть хотя бы один не нулевой, то такая система решений не имеет
, а среди всех оставшихся есть хотя бы один не нулевой, то такая система решений не имеет
Если результирующий вектор имеет все нулевые коэффициенты, то это говорит о том, что или как минимум одно из уравнений есть линейное представление другого, и/или одна из переменных пропорциональна другой.
Эта статья первая, и хотелось бы услышать замечания, критику, пожелания в свой адрес.
Алгоритм и калькулятор создан еще в январе 2019 года и только сегодня я решил опубликовать информацию на Хабре.
Если примете в свой коллектив/общество, то следующая тема будет
— как находить общее решение системы диофантовых уравнений.
Содержание:
- СЛАУ: основные понятия, виды
- Критерий совместности системы
- Квадратные СЛАУ. Матричный метод решения
- Метод / Теорема Крамера
- Метод Гаусса. Метод последовательного исключения неизвестных
- Однородные СЛАУ. Фундаментальная система решений
Методы решения систем линейных уравнений широко используются в задачах математики, экономики, физики, химии и других науках.
На практике, они позволяют не делать лишних действий, а записать систему уравнений в более компактной форме и сократить время
выполнения задач. Поэтому, будущим специалистам очень важно понять основные методы решения и научиться выбирать оптимальный.
Перед изучением примеров решения задач советуем изучить теоретический материал по СЛАУ, прочитать все теоремы и методы
решения. Список тем находится в правом меню.
Примеры по темам:
- СЛАУ: основные понятия, виды
- Критерий совместности системы. Теорема Кронекера-Капелли
- Квадратные СЛАУ. Матричный метод решения
- Решение методом Крамера
- Решение методом Гаусса
- Однородные СЛАУ. Фундаментальная система решений
СЛАУ: основные понятия, виды
Теоретический материал по теме – СЛАУ: основные понятия, виды.
Пример
Задание. Проверить, является ли набор ${0,3}$
решением системы $left{begin{array}{l}
3 x-2 y=-6 \
5 x+y=3
end{array}right.$
Решение. Подставляем в каждое из уравнений системы
$x=0$ и
$y=3$ :
$$3 x-2 y=-6 Rightarrow 3 cdot 0-2 cdot 3=-6 Rightarrow-6=-6$$
$$5 x+y=3 Rightarrow 5 cdot 0+3=3 Rightarrow 3=3$$
Так как в результате подстановки получили верные равенства, то делаем вывод, что заданный набор является
решением указанной СЛАУ.
Ответ. Набор ${0,3}$ является решением
системы $left{begin{array}{l}
3 x-2 y=-6 \
5 x+y=3
end{array}right.$

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. Систему $left{begin{array}{l}
x-y+z-4 t=0 \
5 x+y+t=-11
end{array}right.$
записать в матричной форме и выписать все матрицы, которые ей соответствуют.
Решение. Заданную СЛАУ записываем в матричной форме
$A cdot X=B$ , где матрица системы:
$$A=left(begin{array}{rrrr}
1 & -1 & 1 & -4 \
5 & 1 & 0 & 1
end{array}right)$$
вектор-столбец неизвестных:
$$A=left(begin{array}{rrrr}
1 & -1 & 1 & -4 \
5 & 1 & 0 & 1
end{array}right)$$
вектор-столбец свободных коэффициентов:
$$B=left(begin{array}{c}
0 \
-11
end{array}right)$$
то есть, запись СЛАУ в матричной форме:
$$left(begin{array}{rrrr}
1 & -1 & 1 & -4 \
5 & 1 & 0 & 1
end{array}right)left(begin{array}{l}
x \
y \
z \
t
end{array}right)=left(begin{array}{r}
0 \
-11
end{array}right)$$
Пример
Задание. Записать матрицу и расширенную матрицу системы
$left{begin{array}{l}
2 x_{1}+x_{2}-x_{3}=4 \
x_{1}-x_{2}=5
end{array}right.$
Решение. Матрица системы $A=left(begin{array}{rrr}
2 & 1 & -1 \
1 & -1 & 0
end{array}right)$ ,
тогда расширенная матрица $tilde{A}=(A mid B)=left(begin{array}{rrr|r}
2 & 1 & -1 & 4 \
1 & -1 & 0 & 5
end{array}right)$
Критерий совместности системы
Теоретический материал по теме – критерий совместности системы, теорема Кронекера-Капелли.
Пример
Задание. При каких значениях $lambda$
система $left{begin{array}{l}
2 x_{1}-x_{2}+x_{3}+x_{4}=1 \
x_{1}+2 x_{2}-x_{3}+x_{4}=2 \
x_{1}+7 x_{2}-4 x_{3}+2 x_{4}=lambda
end{array}right.$ будет совместной?
Решение. Ранг матрицы равен количеству ненулевых строк после приведения этой матрицы к
ступенчатому виду. Поэтому записываем расширенную матрицу системы
$tilde{A}$ (слева от вертикальной черты находится
матрица системы $A$ ):
$$tilde{A}=left(begin{array}{rrrr|r}
2 & -1 & 1 & 1 & 1 \
1 & 2 & -1 & 1 & 2 \
1 & 7 & -4 & 2 & lambda
end{array}right)$$
и с помощью элементарных преобразований приводим ее к ступенчатому виду. Для этого вначале от второй строки
отнимаем две вторых строки, а от третьей вторую, в результате получаем:
$$tilde{A} simleft(begin{array}{rrrr|r}
0 & -5 & 3 & -1 & -3 \
1 & 2 & -1 & 1 & 2 \
0 & 5 & -3 & 1 & lambda-2
end{array}right)_{+I} sim$$
Третью строку складываем с первой:
$$tilde{A} simleft(begin{array}{rrrr|r}
0 & -5 & 3 & -1 & -3 \
1 & 2 & -1 & 1 & 2 \
0 & 0 & 0 & 0 & lambda-5
end{array}right)$$
и меняем первую и вторую строки матрицы местами
$$tilde{A} simleft(begin{array}{rrrr|r}
1 & 2 & -1 & 1 & 2 \
0 & -5 & 3 & -1 & -3 \
0 & 0 & 0 & 0 & lambda-5
end{array}right)$$
Матрица приведена к ступенчатому виду. Получаем, что $rangA=2$
, $operatorname{rang} tilde{A}=left{begin{array}{l}
2, lambda=5 \
3, lambda neq 5
end{array}right.$ . Таким образом,
при $lambda=5$ система совместна, а при
$lambda neq 5$ – несовместна.
Квадратные СЛАУ. Матричный метод решения
Теоретический материал по теме – матричный метод решения.
Пример
Задание. Найти решение СЛАУ $left{begin{array}{l}5 x_{1}+2 x_{2}=7 \ 2 x_{1}+x_{2}=9end{array}right.$
матричным методом.
Решение. Выпишем матрицу системы $left{begin{array}{l}
5 x_{1}+2 x_{2}=7 \
2 x_{1}+x_{2}=9
end{array}right.$ и
матрицу правых частей $B=left(begin{array}{l}
7 \
9
end{array}right)$ . Найдем обратную
матрицу для матрицы системы. Для матрицы второго порядка обратную можно находить по следующему алгоритму: 1)
матрица должна быть невырождена, то есть ее определитель не должен равняться нулю: $|A|=1$ ; 2) элементы, стоящие на главной диагонали меняем местами,
а у элементов побочной диагонали меняем знак на противоположный и делим полученные элементы на определитель
матрицы. Итак, получаем, что
$$A^{-1}=left(begin{array}{rr}
1 & -2 \
-2 & 5
end{array}right)$$
Тогда
$$X=left(begin{array}{l}
x_{1} \
x_{2}
end{array}right)=A^{-1} B=left(begin{array}{rr}
1 & -2 \
-2 & 5
end{array}right) cdotleft(begin{array}{l}
7 \
9
end{array}right)=$$
$$=left(begin{array}{r}
-11 \
31
end{array}right) Rightarrowleft(begin{array}{l}
x_{1} \
x_{2}
end{array}right)=left(begin{array}{r}
-11 \
31
end{array}right)$$
Две матрицы одного размера равны, если равны их соответствующие элементы, то есть в итоге имеем, что
$x_{1}=-11$, $x_{2}=31$
Ответ. $x_{1}=-11$, $x_{2}=31$
Пример
Задание. Решить с помощью обратной матрицы систему $left{begin{array}{l}
2 x_{1}+x_{2}+x_{3}=2 \
x_{1}-x_{2}=-2 \
3 x_{1}-x_{2}+2 x_{3}=2
end{array}right.$
Решение. Запишем данную систему в матричной форме:
$AX=B$,
где $A=left(begin{array}{rrr}
2 & 1 & 1 \
1 & -1 & 0 \
3 & -1 & 2
end{array}right)$ – матрица системы,
$X=left(begin{array}{l}
x_{1} \
x_{2} \
x_{3}
end{array}right)$ – столбец неизвестных,
$B=left(begin{array}{r}
2 \
-2 \
2
end{array}right)$ – столбец правых частей. Тогда
$$X=A^-1B$$
Найдем обратную матрицу $A^-1$ к матрице $A$ с помощью союзной матрицы:
$$A^{-1}=frac{1}{Delta} cdot widetilde{A}^{T}$$
Здесь $Delta=|A|$ – определитель матрицы $A$ ;
матрица $tilde{A}$ – союзная матрица, она получена из исходной матрицы
$A$ заменой ее элементов их алгебраическими дополнениями. Найдем
$tilde{A}$ , для этого вычислим алгебраические дополнения к элементам матрицы $A$ :
$A_{11}=(-1)^{1+1}left|begin{array}{rr}-1 & 0 \ -1 & 2end{array}right|=-2$ $A_{12}=(-1)^{1+2}left|begin{array}{cc}
1 & 0 \
3 & 2
end{array}right|=-2$
$A_{13}=(-1)^{1+3}left|begin{array}{cc}
1 & -1 \
3 & -1
end{array}right|=2$ $A_{21}=(-1)^{2+1}left|begin{array}{rr}
1 & 1 \
-1 & 2
end{array}right|=-3$
$A_{22}=(-1)^{2+2}left|begin{array}{cc}
2 & 1 \
3 & 2
end{array}right|=1$ $A_{23}=(-1)^{2+3}left|begin{array}{rr}
2 & 1 \
3 & -1
end{array}right|=5$
$A_{31}=(-1)^{3+1}left|begin{array}{rr}
1 & 1 \
-1 & 0
end{array}right|=1$ $A_{32}=(-1)^{3+2}left|begin{array}{cc}
2 & 1 \
1 & 0
end{array}right|=1$
$A_{33}=(-1)^{3+3}left|begin{array}{rr}
2 & 1 \
1 & -1
end{array}right|=-3$
Таким образом,
$tilde{A}=left(begin{array}{rrr}
-2 & -2 & 2 \
-3 & 1 & 5 \
1 & 1 & -3
end{array}right)$
Определитель матрицы $A$
$$Delta=left|begin{array}{rrr}
2 & 1 & 1 \
1 & -1 & 0 \
3 & -1 & 2
end{array}right|=2 cdot(-1) cdot 2+1 cdot(-1) cdot 1+1 cdot 0 cdot 3-$$
$$-3 cdot(-1) cdot 1-(-1) cdot 0 cdot 2-1 cdot 1 cdot 2=-4 neq 0$$
А тогда
$$tilde{A}=-frac{1}{4}left(begin{array}{rrr}
-2 & -3 & 1 \
-2 & 1 & 1 \
2 & 5 & -3
end{array}right)$$
Отсюда искомая матрица
$$X=left(begin{array}{c}
x_{1} \
x_{2} \
x_{3}
end{array}right)=-frac{1}{4}left(begin{array}{rrr}
-2 & -3 & 1 \
-2 & 1 & 1 \
2 & 5 & -3
end{array}right)left(begin{array}{r}
2 \
-2 \
2
end{array}right)=$$
$$=left(begin{array}{r}
-1 \
1 \
3
end{array}right) Rightarrowleft{begin{array}{l}
x_{1}=-1 \
x_{2}=1 \
x_{3}=3
end{array}right.$$
$$left{begin{array}{l}
x_{1}=-1 \
x_{2}=1 \
x_{3}=3
end{array}right.$$
Метод / Теорема Крамера
Теоретический материал по теме – метод Крамера.
Пример
Задание. Найти решение СЛАУ
$left{begin{array}{l}
5 x_{1}+2 x_{2}=7 \
2 x_{1}+x_{2}=9
end{array}right.$ при помощи метода Крамера.
Решение. Вычисляем определитель матрицы системы:
$$Delta=left|begin{array}{ll}
5 & 2 \
2 & 1
end{array}right|=5 cdot 1-2 cdot 2=1 neq 0$$
Так как $Delta neq 0$ , то по теореме Крамера система
совместна и имеет единственное решение. вычислим вспомогательные определители. Определитель $Delta_{1}$ получим из определителя $Delta$ заменой его первого столбца столбцом
свободных коэффициентов. Будем иметь:
$$Delta_{1}=left|begin{array}{ll}
7 & 2 \
9 & 1
end{array}right|=7-18=-11$$
Аналогично, определитель $Delta_{2}$ получается
из определителя матрицы системы $Delta$ заменой второго столбца столбцом свободных коэффициентов:
$$Delta_{2}=left|begin{array}{ll}
5 & 7 \
2 & 9
end{array}right|=45-14=31$$
Тогда получаем, что
$$x_{1}=frac{Delta_{1}}{Delta}=frac{-11}{1}=-11, x_{2}=frac{Delta_{2}}{Delta}=frac{31}{1}=31$$
Ответ. $x_{-1}=-11$, $x_{2} = 31$
Пример
Задание. При помощи формул Крамера найти решение системы
$left{begin{array}{l}
2 x_{1}+x_{2}+x_{3}=2 \
x_{1}-x_{2}=-2 \
3 x_{1}-x_{2}+2 x_{3}=2
end{array}right.$
Решение. Вычисляем определитель матрицы системы:
$$Delta=left|begin{array}{rrr}
2 & 1 & 1 \
1 & -1 & 0 \
3 & -1 & 2
end{array}right|=2 cdot(-1) cdot 2+1 cdot(-1) cdot 1+1 cdot 0 cdot 3-$$
$$-3 cdot(-1) cdot 1-(-1) cdot 0 cdot 2-1 cdot 1 cdot 2=-4 neq 0$$
Так как определитель матрицы системы неравен нулю, то по теореме Крамера система
совместна и имеет единственное решение. Для его нахождения вычислим следующие определители:
$$Delta_{1}=left|begin{array}{rrr}
2 & 1 & 1 \
-2 & -1 & 0 \
2 & -1 & 2
end{array}right|=2 cdot(-1) cdot 2+(-2) cdot(-1) cdot 1+$$
$$+1 cdot 0 cdot 2-2 cdot(-1) cdot 1-(-1) cdot 0 cdot 2-(-2) cdot 1 cdot 2=4$$
$$Delta_{2}=left|begin{array}{rrr}
2 & 2 & 1 \
1 & -2 & 0 \
3 & 2 & 2
end{array}right|=2 cdot(-2) cdot 2+1 cdot 2 cdot 1+2 cdot 0 cdot 3-$$
$$-3 cdot(-2) cdot 1-2 cdot 0 cdot 2-1 cdot 2 cdot 2=-4$$
$$Delta_{3}=left|begin{array}{rrr}
2 & 1 & 2 \
1 & -1 & -2 \
3 & -1 & 2
end{array}right|=2 cdot(-1) cdot 2+1 cdot(-1) cdot 2+$$
$$+1 cdot(-2) cdot 3-3 cdot(-1) cdot 2-(-1) cdot(-2) cdot 2-1 cdot 1 cdot 2=-12$$
Таким образом,
$x_{1}=frac{Delta_{1}}{Delta}=frac{4}{-4}=-1$
$x_{2}=frac{Delta_{2}}{Delta}=frac{-4}{-4}=1$
$x_{3}=frac{Delta_{3}}{Delta}=frac{-12}{-4}=3$
Ответ. $left{begin{array}{l}x_{1}=-1 \ x_{2}=1 \ x_{3}=3end{array}right.$
Метод Гаусса. Метод последовательного исключения неизвестных
Теоретический материал по теме – метод Гаусса.
Пример
Задание. Решить СЛАУ
$left{begin{array}{l}
2 x_{1}+x_{2}+x_{3}=2 \
x_{1}-x_{2}=-2 \
3 x_{1}-x_{2}+2 x_{3}=2
end{array}right.$ методом Гаусса.
Решение. Выпишем расширенную матрицу системы и при помощи элементарных преобразований над ее
строками приведем эту матрицу к ступенчатому виду (прямой ход) и далее выполним обратный ход метода Гаусса
(сделаем нули выше главной диагонали). Вначале поменяем первую и вторую строку, чтобы элемент $a_{1}$ равнялся 1 (это мы делаем для упрощения
вычислений):
$$tilde{A}=A mid B=left(begin{array}{rrr|r}
2 & 1 & 1 & 2 \
1 & -1 & 0 & -2 \
3 & -1 & 2 & 2
end{array}right) simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
2 & 1 & 1 & 2 \
3 & -1 & 2 & 2
end{array}right)$$
Далее делаем нули под главной диагональю в первом столбце. Для этого от второй строки отнимаем две первых,
от третьей – три первых:
$$tilde{A} simleft(begin{array}{ccc|c}
1 & -1 & 0 & -2 \
0 & 3 & 1 & 6 \
0 & 2 & 2 & 8
end{array}right)$$
Все элементы третьей строки делим на два (или, что тоже самое, умножаем на $frac{1}{2}$:
$$tilde{A} simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
0 & 3 & 1 & 6 \
0 & 1 & 1 & 4
end{array}right)$$
Далее делаем нули во втором столбце под главной диагональю, для удобства вычислений
поменяем местами вторую и третью строки, чтобы диагональный элемент равнялся 1:
$$tilde{A} simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
0 & 1 & 1 & 4 \
0 & 3 & 1 & 6
end{array}right)$$
От третьей строки отнимаем вторую, умноженную на 3:
$$tilde{A} simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
0 & 1 & 1 & 4 \
0 & 0 & -2 & -6
end{array}right)$$
Умножив третью строку на $left(-frac{1}{2}right)$ , получаем:
$$tilde{A} simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
0 & 1 & 1 & 4 \
0 & 0 & 1 & 3
end{array}right)$$
Проведем теперь обратный ход метода Гаусса (метод Гассу-Жордана), то есть сделаем нули над главной диагональю.
Начнем с элементов третьего столбца. Надо обнулить элемент
$$tilde{A} simleft(begin{array}{rrr|r}
1 & -1 & 0 & -2 \
0 & 1 & 0 & 1 \
0 & 0 & 1 & 3
end{array}right)$$
Далее обнуляем недиагональные элементы второго столбца, к первой строке прибавляем вторую:
$$tilde{A} simleft(begin{array}{ccc|c}
1 & 0 & 0 & -1 \
0 & 1 & 0 & 1 \
0 & 0 & 1 & 3
end{array}right)$$
Полученной матрице соответствует система
$left{begin{array}{l}
x_{1}+0 cdot x_{2}+0 cdot x_{3}=-1 \
0 cdot x_{1}+x_{2}+0 cdot x_{3}=1 \
0 cdot x_{1}+0 cdot x_{2}+x_{3}=3
end{array}right.$
или $left{begin{array}{l}
x_{1}=-1 \
x_{2}=1 \
x_{3}=3
end{array}right.$
Ответ. $left{begin{array}{l}
x_{1}=-1 \
x_{2}=1 \
x_{3}=3
end{array}right.$
Однородные СЛАУ. Фундаментальная система решений
Теоретический материал по теме – однородные СЛАУ.
Пример
Задание. Выяснить, имеет ли однородная СЛАУ
$left{begin{array}{l}
3 x-2 y=-1 \
x+3 y=7
end{array}right.$ ненулевые решения.
Решение. Вычислим определитель матрицы системы:
$$Delta=left|begin{array}{rr}
3 & -2 \
1 & 3
end{array}right|=9-(-2)=9+2=11 neq 0$$
Так как определитель не равен нулю, то система имеет только нулевое решение $x=y=0$
Ответ. Система имеет только нулевое решение.
Пример
Задание. Найти общее решение и ФСР однородной системы
$Delta=left|begin{array}{rr}
3 & -2 \
1 & 3
end{array}right|=9-(-2)=9+2=11 neq 0$
Решение. Приведем систему к ступенчатому виду с помощью метода Гаусса. Для этого записываем
матрицу системы (в данном случае, так как система однородная, то ее правые части равны нулю, в этом случае столбец
свободных коэффициентов можно не выписывать, так как при любых элементарных преобразованиях в правых частях будут
получаться нули):
$$A=left(begin{array}{rrrrr}
1 & 1 & 0 & -3 & -1 \
1 & -2 & 2 & -1 & 0 \
4 & -2 & 6 & 3 & -4 \
2 & 4 & -2 & 4 & -7
end{array}right)$$
с помощью элементарных преобразований приводим данную матрицу к ступенчатому виду. От второй строки отнимаем
первую, от третьей – четыре первых, от четвертой – две первых:
$$A simleft(begin{array}{rrrrr}
1 & 1 & 0 & -3 & -1 \
0 & -2 & 2 & 2 & 1 \
0 & -6 & 6 & 15 & 0 \
0 & 2 & -2 & 10 & -5
end{array}right)$$
Обнуляем элементы второго столбца, стоящие под главной диагональю, для этого от третьей строки отнимаем три
вторых, к четвертой прибавляем вторую:
$$A simleft(begin{array}{rrrrr}
1 & 1 & 0 & -3 & -1 \
0 & -2 & 2 & 2 & 1 \
0 & 0 & 0 & 9 & -3 \
0 & 0 & 0 & 12 & -4
end{array}right)$$
От четвертой строки отнимем $$frac{4}{3}$$ третьей и третью
строку умножим на $$frac{1}{3}$$ :
$$A simleft(begin{array}{rrrrr}
1 & 1 & 0 & -3 & -1 \
0 & -2 & 2 & 2 & 1 \
0 & 0 & 0 & 3 & -1 \
0 & 0 & 0 & 0 & 0
end{array}right)$$
Нулевые строки можно далее не рассматривать, тогда получаем, что
$$A simleft(begin{array}{rrrrr}
1 & 1 & 0 & -3 & -1 \
0 & -2 & 2 & 2 & 1 \
0 & 0 & 0 & 3 & -1
end{array}right)$$
Далее делаем нули над главной диагональю, для этого от первой строки отнимаем третью, а
ко второй строке прибавляем третью:
$$A simleft(begin{array}{rrrrr}
1 & 1 & 0 & -6 & 0 \
0 & -2 & 2 & 5 & 0 \
0 & 0 & 0 & 3 & -1
end{array}right)$$
то есть получаем систему, соответствующую данной матрице:
$$left{begin{array}{l}
x_{1}+x_{2}-6 x_{4}=0 \
-2 x_{2}+2 x_{3}+5 x_{4}=0 \
3 x_{4}-x_{5}=0
end{array}right.$$
Или, выразив одни переменные через другие, будем иметь:
$$left{begin{array}{l}
x_{1}=-x_{2}+6 x_{4} \
x_{2}=x_{2} \
x_{3}=x_{2}-frac{5}{2} x_{4} \
x_{4}=x_{4} \
x_{5}=3 x_{4}
end{array}right.$$
Здесь $x_{2}, x_{4}$ – независимые (или свободные)
переменные (это те переменные, через которые мы выражаем остальные переменные), $x_{1},x_{3},x_{5}$ – зависимые (связанные) переменные
(то есть те, которые выражаются через свободные). Количество свободных переменных равно разности общего количества
переменных $n$ (в рассматриваемом примере $n=5$ , так как система зависит от пяти переменных) и ранга матрицы $r$ (в этом
случае получили, что $r=3$ – количество
ненулевых строк после приведения матрицы к ступенчатому виду): $n-r=5-3=2$
Так как ранг матрицы $r=3$ , а количество неизвестных
системы $n=5$ , то тогда количество решений в ФСР $n-r=5-3-2$ (для проверки, это число должно равняться количеству свободных переменных).
Для нахождения ФСР составляем таблицу, количество столбцов которой соответствует количеству неизвестных (то есть
для рассматриваемого примера равно 5), а количество строк равно количеству решений ФСР (то есть имеем две строки).
В заголовке таблицы выписываются переменные, свободные переменные отмечаются стрелкой. Далее свободным переменным
придаются любые, одновременно не равные нулю значений и из зависимости между свободными и связанными переменными
находятся значения остальных переменных. Для рассматриваемой задачи эта зависимость имеет вид:
$$left{begin{array}{l}
x_{1}=-x_{2}+6 x_{4} \
x_{3}=x_{2}-frac{5}{2} x_{4} \
x_{5}=3 x_{4}
end{array}right.$$
Тогда придавая в первом случае, например, независимым переменным значения
$x_{2}=1$ , $x_{4}=0$ получаем, что
$left{begin{array}{l}
x_{1}=-1+6 cdot 0=-1 \
x_{3}=1-frac{5}{2} cdot 0=1 \
x_{5}=3 cdot 0=0
end{array}right.$ . Полученные значения записываем в первую
строку таблицы. Аналогично, беря $x_{2}=0$ , $x_{4}=2$, будем иметь, что
$x_{1}=12,x_{3}=-5,x_{5}=6$ , что и определяет второе решение ФСР.
В итоге получаем следующую таблицу:
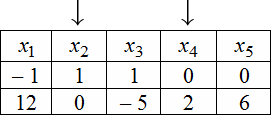
Эти две строчки и есть фундаментальным решением заданной однородной СЛАУ. Частное решение системы:
$$left{begin{array}{l}
x_{1}=-1+6 cdot 0=-1 \
x_{3}=1-frac{5}{2} cdot 0=1 \
x_{5}=3 cdot 0=0
end{array}right.$$
Общее решение является линейной комбинацией частных решений:
$$X=C_{1} X_{1}+C_{2} X_{2}=C_{1}left(begin{array}{r}
-1 \
1 \
1 \
0 \
0
end{array}right)+C_{2}left(begin{array}{r}
12 \
0 \
-5 \
2 \
6
end{array}right)$$
где коэффициенты $C_{1}, C_{2}$ не равны нулю одновременно. Или запишем общее решение в таком виде:
$left{begin{array}{l}
x_{1}=-C_{1}+12 C_{2} \
x_{2}=C_{1} \
x_{3}=C_{1}-5 C_{2} \
x_{4}=2 C_{2} \
x_{5}=6 C_{2}
end{array}right.$
$C_{1}, C_{2} neq 0$
Придавая константам $C_{1}, C_{2}$ определенные значения
и подставляя их в общее решение, можно будет находить частные решения однородной СЛАУ.
Читать первую тему – СЛАУ: основные понятия, виды,
раздела системы линейных алгебраических уравнений.
