Источники опорного напряжения
В предыдущей статье я рассказывал про умножители напряжения, а в этой закладочке я расскажу об самом основном в схемах это опорное напряжении. Для чего нужны источники опорного напряжения, а для маломощных частей схемы, для питания их стабильным током, для примерного напряжения, от которого нужно отпираться или же с которым нужно сравниваться.
Стабилизатор на стабилитроне
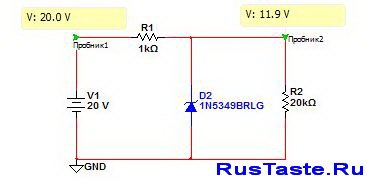
Самый простой вариант стабилизации на стабилитроне. Резистор R1 ограничивает ток. Условие (Uвх-Uвых)/Rs>Uвых/R2. Так же такой стабилизатор можно усилить с помощью транзистора.
Стабилизатор на TL431

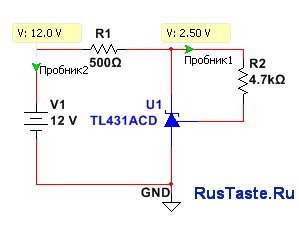
ИОН(источник опорного напряжения) на стабилитроне прост, но для более высокой стабилизации, хорошо использовать регулируемый стабилитрон TL431. Которым кстати можно выставить практически любое напряжение на выходе ИОН от 2,5В до 37В. Главное, что бы входящее напряжение не превышало 40В, а рассеиваемая мощность не превышала 0,75Вт
Управление стабилитрона идет через управляющую ножку, на которой должно быть опорное равное 2,5В. Это опорное рассчитывается резисторами R2 и R3. На TL431 можно сделать так же стабилитрон на 2,5В, если подключить по схеме
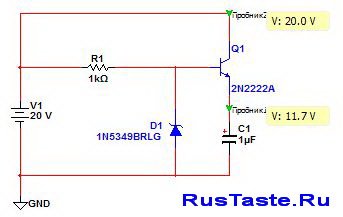
Ток TL431 до 100мА, но его можно усилить с помощью транзистора, как на схеме

На этом пока остановлюсь с Ион-ами. В следующей закладке расскажу про интегральные стабилизаторы напряжения, что в принципе является продолжением статьи про ИОН-ы.
Источник
Аналого-цифровое преобразование для начинающих
В этой статье рассмотрены основные вопросы, касающиеся принципа действия АЦП различных типов. При этом некоторые важные теоретические выкладки, касающиеся математического описания аналого-цифрового преобразования остались за рамками статьи, но приведены ссылки, по которым заинтересованный читатель сможет найти более глубокое рассмотрение теоретических аспектов работы АЦП. Таким образом, статья касается в большей степени понимания общих принципов функционирования АЦП, чем теоретического анализа их работы.
 «
«
В качестве отправной точки дадим определение аналого-цифровому преобразованию. Аналого-цифровое преобразование – это процесс преобразования входной физической величины в ее числовое представление. Аналого-цифровой преобразователь – устройство, выполняющее такое преобразование. Формально, входной величиной АЦП может быть любая физическая величина – напряжение, ток, сопротивление, емкость, частота следования импульсов, угол поворота вала и т.п. Однако, для определенности, в дальнейшем под АЦП мы будем понимать исключительно преобразователи напряжение-код.
Понятие аналого-цифрового преобразования тесно связано с понятием измерения. Под измерением понимается процесс сравнения измеряемой величины с некоторым эталоном, при аналого-цифровом преобразовании происходит сравнение входной величины с некоторой опорной величиной (как правило, с опорным напряжением). Таким образом, аналого-цифровое преобразование может рассматриваться как измерение значения входного сигнала, и к нему применимы все понятия метрологии, такие, как погрешности измерения.
Основные характеристики АЦП
АЦП имеет множество характеристик, из которых основными можно назвать частоту преобразования и разрядность. Частота преобразования обычно выражается в отсчетах в секунду (samples per second, SPS), разрядность – в битах. Современные АЦП могут иметь разрядность до 24 бит и скорость преобразования до единиц GSPS (конечно, не одновременно). Чем выше скорость и разрядность, тем труднее получить требуемые характеристики, тем дороже и сложнее преобразователь. Скорость преобразования и разрядность связаны друг с другом определенным образом, и мы можем повысить эффективную разрядность преобразования, пожертвовав скоростью.
Существует множество типов АЦП, однако в рамках данной статьи мы ограничимся рассмотрением только следующих типов:
- АЦП параллельного преобразования (прямого преобразования, flash ADC)
- АЦП последовательного приближения (SAR ADC)
- дельта-сигма АЦП (АЦП с балансировкой заряда)
Существуют также и другие типы АЦП, в том числе конвейерные и комбинированные типы, состоящие из нескольких АЦП с (в общем случае) различной архитектурой. Однако приведенные выше архитектуры АЦП являются наиболее показательными в силу того, что каждая архитектура занимает определенную нишу в общем диапазоне скорость-разрядность.
Наибольшим быстродействием и самой низкой разрядностью обладают АЦП прямого (параллельного) преобразования. Например, АЦП параллельного преобразования TLC5540 фирмы Texas Instruments обладает быстродействием 40MSPS при разрядности всего 8 бит. АЦП данного типа могут иметь скорость преобразования до 1 GSPS. Здесь можно отметить, что еще большим быстродействием обладают конвейерные АЦП (pipelined ADC), однако они являются комбинацией нескольких АЦП с меньшим быстродействием и их рассмотрение выходит за рамки данной статьи.
Среднюю нишу в ряду разрядность-скорость занимают АЦП последовательного приближения. Типичными значениями является разрядность 12-18 бит при частоте преобразования 100KSPS-1MSPS.
Наибольшей точности достигают сигма-дельта АЦП, имеющие разрядность до 24 бит включительно и скорость от единиц SPS до единиц KSPS.
Еще одним типом АЦП, который находил применение в недавнем прошлом, является интегрирующий АЦП. Интегрирующие АЦП в настоящее время практически полностью вытеснены другими типами АЦП, но могут встретиться в старых измерительных приборах.
АЦП прямого преобразования
АЦП прямого преобразования получили широкое распространение в 1960-1970 годах, и стали производиться в виде интегральных схем в 1980-х. Они часто используются в составе «конвейерных» АЦП (в данной статье не рассматриваются), и имеют разрядность 6-8 бит при скорости до 1 GSPS.
Архитектура АЦП прямого преобразования изображена на рис. 1

Рис. 1. Структурная схема АЦП прямого преобразования
Принцип действия АЦП предельно прост: входной сигнал поступает одновременно на все «плюсовые» входы компараторов, а на «минусовые» подается ряд напряжений, получаемых из опорного путем деления резисторами R. Для схемы на рис. 1 этот ряд будет таким: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) Uref, где Uref – опорное напряжение АЦП.
Пусть на вход АЦП подается напряжение, равное 1/2 Uref. Тогда сработают первые 4 компаратора (если считать снизу), и на их выходах появятся логические единицы. Приоритетный шифратор (priority encoder) сформирует из «столбца» единиц двоичный код, который фиксируется выходным регистром.
Теперь становятся понятны достоинства и недостатки такого преобразователя. Все компараторы работают параллельно, время задержки схемы равно времени задержки в одном компараторе плюс время задержки в шифраторе. Компаратор и шифратор можно сделать очень быстрыми, в итоге вся схема имеет очень высокое быстродействие.
Но для получения N разрядов нужно 2^N компараторов (и сложность шифратора тоже растет как 2^N). Схема на рис. 1. содержит 8 компараторов и имеет 3 разряда, для получения 8 разрядов нужно уже 256 компараторов, для 10 разрядов – 1024 компаратора, для 24-битного АЦП их понадобилось бы свыше 16 млн. Однако таких высот техника еще не достигла.
АЦП последовательного приближения
АЦП последовательного приближения реализует алгоритм «взвешивания», восходящий еще к Фибоначчи. В своей книге «Liber Abaci» (1202 г.) Фибоначчи рассмотрел «задачу о выборе наилучшей системы гирь», то есть о нахождении такого ряда весов гирь, который бы требовал для нахождения веса предмета минимального количества взвешиваний на рычажных весах. Решением этой задачи является «двоичный» набор гирь. Подробнее о задаче Фибоначчи можно прочитать, например, здесь: http://www.goldenmuseum.com/2015AMT_rus.html.
Аналого-цифровой преобразователь последовательного приближения (SAR, Successive Approximation Register) измеряет величину входного сигнала, осуществляя ряд последовательных «взвешиваний», то есть сравнений величины входного напряжения с рядом величин, генерируемых следующим образом:
1. на первом шаге на выходе встроенного цифро-аналогового преобразователя устанавливается величина, равная 1/2Uref (здесь и далее мы предполагаем, что сигнал находится в интервале (0 – Uref).
2. если сигнал больше этой величины, то он сравнивается с напряжением, лежащим посередине оставшегося интервала, т.е., в данном случае, 3/4Uref. Если сигнал меньше установленного уровня, то следующее сравнение будет производиться с меньшей половиной оставшегося интервала (т.е. с уровнем 1/4Uref).
3. Шаг 2 повторяется N раз. Таким образом, N сравнений («взвешиваний») порождает N бит результата.

Рис. 2. Структурная схема АЦП последовательного приближения.
Таким образом, АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину и текущее значение «весового» напряжения (на рис. 2. обозначен треугольником).
2. Цифро-аналоговый преобразователь (Digital to Analog Converter, DAC). Он генерирует «весовое» значение напряжения на основе поступающего на вход цифрового кода.
3. Регистр последовательного приближения (Successive Approximation Register, SAR). Он осуществляет алгоритм последовательного приближения, генерируя текущее значение кода, подающегося на вход ЦАП. По его названию названа вся данная архитектура АЦП.
4. Схема выборки-хранения (Sample/Hold, S/H). Для работы данного АЦП принципиально важно, чтобы входное напряжение сохраняло неизменную величину в течение всего цикла преобразования. Однако «реальные» сигналы имеют свойство изменяться во времени. Схема выборки-хранения «запоминает» текущее значение аналогового сигнала, и сохраняет его неизменным на протяжении всего цикла работы устройства.
Достоинством устройства является относительно высокая скорость преобразования: время преобразования N-битного АЦП составляет N тактов. Точность преобразования ограничена точностью внутреннего ЦАП и может составлять 16-18 бит (сейчас стали появляться и 24-битные SAR ADC, например, AD7766 и AD7767).
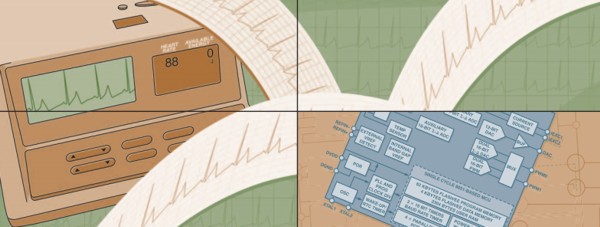
И, наконец, самый интересный тип АЦП – сигма-дельта АЦП, иногда называемый в литературе АЦП с балансировкой заряда. Структурная схема сигма-дельта АЦП приведена на рис. 3.
Рис.3. Структурная схема сигма-дельта АЦП.
Принцип действия данного АЦП несколько более сложен, чем у других типов АЦП. Его суть в том, что входное напряжение сравнивается со значением напряжения, накопленным интегратором. На вход интегратора подаются импульсы положительной или отрицательной полярности, в зависимости от результата сравнения. Таким образом, данный АЦП представляет собой простую следящую систему: напряжение на выходе интегратора «отслеживает» входное напряжение (рис. 4). Результатом работы данной схемы является поток нулей и единиц на выходе компаратора, который затем пропускается через цифровой ФНЧ, в результате получается N-битный результат. ФНЧ на рис. 3. Объединен с «дециматором», устройством, снижающим частоту следования отсчетов путем их «прореживания».
Рис. 4. Сигма-дельта АЦП как следящая система
Ради строгости изложения, нужно сказать, что на рис. 3 изображена структурная схема сигма-дельта АЦП первого порядка. Сигма-дельта АЦП второго порядка имеет два интегратора и две петли обратной связи, но здесь рассматриваться не будет. Интересующиеся данной темой могут обратиться к [3].
На рис. 5 показаны сигналы в АЦП при нулевом уровне на входе (сверху) и при уровне Vref/2 (снизу).
Рис. 5. Сигналы в АЦП при разных уровнях сигнала на входе.
Более наглядно работу сигма-дельта АЦП демонстрирует небольшая программа, находящаяся тут: http://designtools.analog.com/dt/sdtutorial/sdtutorial.html.
Теперь, не углубляясь в сложный математический анализ, попробуем понять, почему сигма-дельта АЦП обладают очень низким уровнем собственных шумов.
Рассмотрим структурную схему сигма-дельта модулятора, изображенную на рис. 3, и представим ее в таком виде (рис. 6):
Рис. 6. Структурная схема сигма-дельта модулятора
Здесь компаратор представлен как сумматор, который суммирует непрерывный полезный сигнал и шум квантования.
Пусть интегратор имеет передаточную функцию 1/s. Тогда, представив полезный сигнал как X(s), выход сигма-дельта модулятора как Y(s), а шум квантования как E(s), получаем передаточную функцию АЦП:
То есть, фактически сигма-дельта модулятор является фильтром низких частот (1/(s+1)) для полезного сигнала, и фильтром высоких частот (s/(s+1)) для шума, причем оба фильтра имеют одинаковую частоту среза. Шум, сосредоточенный в высокочастотной области спектра, легко удаляется цифровым ФНЧ, который стоит после модулятора.
Рис. 7. Явление «вытеснения» шума в высокочастотную часть спектра
Однако следует понимать, что это чрезвычайно упрощенное объяснение явления вытеснения шума (noise shaping) в сигма-дельта АЦП.
Итак, основным достоинством сигма-дельта АЦП является высокая точность, обусловленная крайне низким уровнем собственного шума. Однако для достижения высокой точности нужно, чтобы частота среза цифрового фильтра была как можно ниже, во много раз меньше частоты работы сигма-дельта модулятора. Поэтому сигма-дельта АЦП имеют низкую скорость преобразования.
Они могут использоваться в аудиотехнике, однако основное применение находят в промышленной автоматике для преобразования сигналов датчиков, в измерительных приборах, и в других приложениях, где требуется высокая точность. но не требуется высокой скорости.
Самым старым упоминанием АЦП в истории является, вероятно, патент Paul M. Rainey, «Facsimile Telegraph System,» U.S. Patent 1,608,527, Filed July 20, 1921, Issued November 30, 1926. Изображенное в патенте устройство фактически является 5-битным АЦП прямого преобразования.
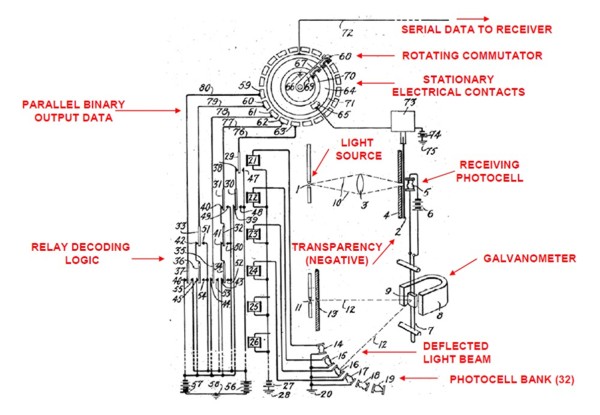
Рис. 8. Первый патент на АЦП
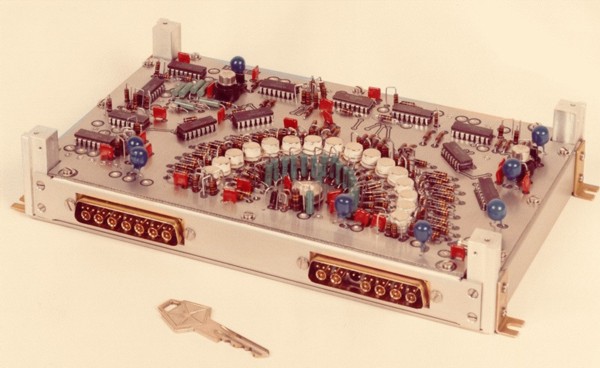
Рис. 9. АЦП прямого преобразования (1975 г.)
Устройство, изображенное на рисунке, представляет собой АЦП прямого преобразования MOD-4100 производства Computer Labs, 1975 года выпуска, собранный на основе дискретных компараторов. Компараторов 16 штук (они расположены полукругом, для того, чтобы уравнять задержку распространения сигнала до каждого компаратора), следовательно, АЦП имеет разрядность всего 4 бита. Скорость преобразования 100 MSPS, потребляемая мощность 14 ватт.
На следующем рисунке изображена продвинутая версия АЦП прямого преобразования.

Рис. 10. АЦП прямого преобразования (1970 г.)
Устройство VHS-630 1970 года выпуска, произведенное фирмой Computer Labs, содержало 64 компаратора, имело разрядность 6 бит, скорость 30MSPS и потребляло 100 ватт (версия 1975 года VHS-675 имела скорость 75 MSPS и потребление 130 ватт).
Источник
Источники опорного напряжения
Необходимость в хорошем источнике опорного напряжения часто возникает во многих схемах. Например, если нужно построить источник стабилизированного питания с лучшими характеристиками, чем у готовых стабилизаторов типа 723 или нужно построить точный источник тока (т. е. схему со стабилизированным выходным током).
У стабилизаторов типа 723 возникают неточности, поскольку интегральные схемы стабилизаторов рассеивают заметную мощность из за наличия встроенных проходных транзисторов. Они могут довольно ощутимо нагреваться с соответствующим дрейфом параметров.
Есть еще одна область, в которой нужны точные прецизионные источники опорных напряжений (но не прецизионные источники питания), – это проектирование точных вольтметров, омметров или амперметров.
Существуют два вида источников опорного напряжения стабилитроны и так называемые источники опорного напряжения с шириной запрещенной зоны полупроводника («U БЭ стабилитроны»). Каждый из них может использоваться как сам по себе, так и в составе интегральной микросхемы (ИМС) источника опорного напряжения.

Простейший источник опорного напряжения – стабилитрон
Простейшим видом источников опорного напряжения является стабилитрон. В сущности это диод, работающий при обратном смещении на участке, соответствующем напряжению пробоя, где ток пробоя очень быстро возрастает при дальнейшем росте напряжения. Чтобы использовать этот диод в качестве источника опорного напряжения, надо обеспечить прохождение через него приблизительно постоянного тока. Обычно это делается с помощью резистора, подключенного к достаточно высокому напряжению, и таким образом строится наиболее примитивный стабилизированный источник.
Стабилитроны выпускаются на целый ряд значений напряжения – от 2 до 200 В (их напряжения имеют тот же набор значений, что и сопротивления стандартных 5 %‑ных резисторов), с допустимой мощностью рассеяния от долей ватта до 50 Вт и допуском на напряжение стабилизации от 1 до 20 %. Привлекательные на первый взгляд в качестве опорных источников напряжения для различных целей стабилитроны, однако, не так просты в использовании по многим причинам: они имеют конечный набор значений напряжения, у них большой допуск на напряжение стабилизации (кроме дорогих прецизионных стабилитронов), они сильно шумят и их напряжение зависит от тока и температуры. Вот пример двух последних эффектов: стабилитрон на 27 В из распространенной серии 1N5221 стабилитронов на 500 мВт имеет температурный коэффициент порядка +0,1 %/°С, и в силу этого его напряжение меняется на 1 %, когда ток изменяется от 10 до 50 % от максимального.
Есть исключение из правила о плохих характеристиках стабилитронов. Оказывается, что в окрестности значения напряжения стабилизации 6 В стабилитроны мало чувствительны к изменениям тока и при этом имеют почти нулевой температурный коэффициент. Этот эффект виден на кривых на рисунках ниже. Кривые получены путем измерения стабилитронов с разными напряжениями.
Это характерное поведение связано с тем, что в стабилитронах в действительности используются два разных механизма пробоя: зенеровский и лавинный. Первый – при низком напряжении, второй – при высоком.
Если стабилитрон используется только как стабильный источник напряжения и вам все равно, каково будет это напряжение, то лучше всего взять один из компенсированных опорных стабилитронов. Он состоящих из стабилитрона приблизительно на 5,6 В и последовательно с ним соединенного диода, смещенного в прямом направлении. Напряжение стабилитрона выбирается так, чтобы взаимно компенсировать положительный температурный коэффициент стабилитрона и отрицательный температурный коэффициент диода, соответствующий около – 2,1 мВ/°С.
Как видно из рисунка ниже, температурный коэффициент зависит от рабочего тока, а также от напряжения стабилитрона.

Таким образом, выбирая ток стабилитрона, можно как‑то «подстроить» температурный коэффициент. Из таких стабилитронов со встроенными последовательно диодами получаются неплохие источники опорного напряжения.
Для примера: серия дешевых стабилитронов на 6,2 В 1N821 имеет температурные коэффициенты от 10‑4/°С (1N821) до 5·10‑6/°С (1N829), а стабилитроны 1N940 и 1N946 на 9 В и 11,7 В имеют температурный коэффициент 2·10‑6/°С.
Задание рабочего тока стабилитрона
Описанные выше компенсированные стабилитроны могут использоваться в схемах в качестве источников стабильного напряжения, но надо обеспечить питание их постоянным током. Для серии 1N821 изготовителем указано 6,2 В +5 % при токе 7,5 мА с дифференциальным сопротивлением 15 Ом. Т.е. изменение тока на 1 мА изменяет напряжение в три раза сильнее, чем изменение температуры от ‑55 до +100 °C (для прибора 1N829). На рисунке показано, как довольно просто можно обеспечить постоянный ток смещения прецизионного стабилитрона.

Операционный усилитель включен как неинвертирующий усилитель и имеет на выходе стабильное напряжение, равное +10,0 В, которое используется для получения прецизионного тока 7,5 мА. Это самозапускающаяся схема при включении операционного усилителя от однополярного источника питания. Прежде чем ставить в схему тот или иной ОУ, убедитесь, что его диапазон синфазных входных сигналов включает в себя потенциал минусовой шины источника питания (ОУ с «однополярным питанием»).
Существуют компенсированные специальные стабилитроны с гарантированной временной стабильностью напряжения. Этот параметр, как правило, не указывается. Примеры ‑ серия 1N3501 и 1N4890. Стабилитроны такого типа имеют гарантированную стабильность 5·10‑6/1000 ч или еще лучше. Они недешевы.
Стабилитронные интегральные микросхемы
Для достижения свойственных стабилизатору 723 превосходных характеристик (стабильность Uоп 30·10‑6 / °С) используется компенсированный стабилитрон. Стабилизатор 723 – вполне приличный источник опорного напряжения, и совместно с необходимыми навесными элементами эта ИМС может использоваться для получения стабильного источника с любым желательным напряжением.
Стабилизатор 723, применяемый в качестве опорного источника напряжения, служит примером «трехвыводного» опорного источника, т. е. источника, для работы которого нужен внешний источник питания. В схему источника входят цепь смещения стабилитрона и буферный усилитель выходного напряжения. К трехвыводной стабилитронной интегральной микросхеме относится LM369 (1,5·10‑6/°C тип.).
Прецизионные температурно‑компенсированные стабилитронные ИМС выпускаются в виде двухвыводных устройств. С точки зрения внешних электрических соединений они выглядят просто как стабилитроны. Но в действительности содержат еще ряд активных элементов для улучшения характеристик.
Пример:
— LM329 — с напряжением ~ 6,9 В, в лучшем варианте ее темп, коэффициент равен 6·10‑6/°С (тип.), 10‑5/°С (макс.) при постоянном токе 1 мА
— LM399 — температурно‑стабилизированная (0,3·10‑6/°С тип.),
— LM385 — микромощная, работает от тока, доходящего до 10 мкА
— LTZ1000 — типовой температурный коэффициент 0,05·10‑6/°С, дрейф 0,3·10‑6/месяц и низкочастотный шум 1,2 мкВ.
К несчастью, стабилитронные ИМС, как и их дискретные аналоги, сильно шумят. Шум становится сильнее для стабилизаторов, использующих лавинный пробой, т. е. с напряжением стабилитрона больше 6 В. На рисунке показан график шума стабилитронного источника 723.

Этот шум связан с поверхностными эффектами и применение стабилитронной структуры с так называемым захороненным (скрытым) или подповерхностным слоем может сильно улучшить стабильность стабилитрона и существенно уменьшить его шум.
Источник опорного напряжения на “UБЭ стабилитроне”
Получила распространение схема, известная под названием «стабилитрон с напряжением запрещенной зоны». Более точно было бы название «UБЭ ‑стабилитрон». Это легко понять, вспомнив формулу Эберса‑Молла для диода. В основе схемы лежит идея генерации напряжения с температурным коэффициентом, положительным и равным по абсолютной величине отрицательному температурному коэффициенту напряжения UБЭ. При сложении этого напряжения с UБЭ получается напряжение с нулевым температурным коэффициентом.
Начнем с рассмотрения токового зеркала с двумя транзисторами, работающими с разной плотностью эмиттерного тока, с обычным отношением плотностей тока порядка 10:1.

О том, где взять постоянный задающий ток Iупр немного ниже. Сейчас вам надо только преобразовать этот ток в напряжение с помощью резистора и сложить с нормальным напряжением UБЭ. Такая схема показана ниже.

Резистор R2 устанавливает величину напряжения, которое складывается с UБЭ и имеет положительный температурный коэффициент. Подбирая должным образом величину R2, получаем нулевой результирующий температурный коэффициент. Оказывается, что температурный коэффициент будет нулевым, если суммарное напряжение равно напряжению запрещенной зоны кремния (при температуре абсолютного нуля), т. е. примерно 1,22 В. Часть схемы, обведенная пунктиром, является стабилитроном. Ее выход используется (через резистор R3). Для создания постоянного тока Iупр, который мы с самого начала считали существующим.
На следующем рисунке показана другая весьма популярная схема стабилитрона «запрещенной зоны» (заменена обведенная часть схемы выше).

Т 1 и Т2 ‑ согласованная пара транзисторов, вынужденная благодаря обратной связи по разности напряжений коллекторов работать при отношении токов коллекторов 10:1. Разность напряжений UБЭ, равная (kT /q )ln 10, делает ток эмиттера Т2 пропорциональным температуре (разность напряжений приложена к резистору R1). Но поскольку коллекторный ток Т1 всегда в 10 раз больше этой величины, он также пропорционален Т. Поэтому суммарный эмиттерный ток пропорционален Τ и создает на резисторе R2 падение напряжения, имеющее положительный температурный коэффициент. Это падение напряжения может быть использовано в качестве выходного сигнала температурного датчика. В данной схеме напряжение, снимаемое с резистора R2, складывается с напряжением UБЭ транзистора Т1 для получения стабильного опорного напряжения с нулевым температурным коэффициентом на базах транзисторов Т1 и Т2. «Опорные источники запрещенной зоны» существуют в самых разных вариантах, но для них всех характерно сложение напряжения UБЭ с напряжением, созданным парой транзисторов, работающих с некоторым заданным отношением плотностей токов.
ИМС опорных источников с напряжением запрещенной зоны
Примером стабилитрона с напряжением запрещенной зоны является недорогая двухвыводная схема LM385‑1.2, имеющая номинальное рабочее напряжение 1,235В ± 1 % (ее собрат LM385‑2.5 имеет встроенную схему для генерации 2,5 В), работоспособную при токах вплоть до столь малых значений как 10 мкА. Это много меньше, чем можно было бы требовать от любого стабилитрона, и это делает данные ИМС прекрасным образом подходящими для микромощных приборов. Столь низкое опорное напряжение (1,235 В) часто намного более удобная вещь, чем номинальное рабочее напряжение стабилитронов 5 В. Можно встретить стабилитроны с номинальным напряжением 3,3 В, однако у них совершенно ужасные характеристики с очень плавным изгибом.
Лучшие образцы из ряда LM385 гарантируют температурный коэффициент не хуже 30·10‑6/°С и типичное значение динамического сопротивления 1 Ом при токе 100 мкА. При этом у стабилитрона 1N4370 на 2,4 В — температурный коэффициент 800·10‑6/°С (тип.), динамическое сопротивление около 3000 Ом при токе 100 мкА, и одновременно при этом же токе «напряжение стабилизации» (определяемое в спецификации как 2,4 В при токе 20 мА) составляет около 1,1В!
Чуть подороже можно найти опорные источники на UБЭ‑стабилитронах с превосходной стабильностью, например такие, как двухвыводной LT1029 или трехвыводной REF43 (2,5 В, 3·10‑6/°C макс). Последний тип, так же как и трехвыводные источники опорного напряжения на стабилитронах, нуждается в источнике питания постоянного тока.
Одним из интересных источников опорного напряжения является ИМС TL431C. Это недорогой источник опорного напряжения на «программируемом стабилитроне». Его схема включения показана на рисунке

«Стабилитрон» включается, когда управляющее напряжение достигает 2,75 В («стабилитрон» сделан по схеме UБЭ). Этот прибор по управляющему входу потребляет ток всего лишь в несколько микроампер и имеет температурный коэффициент выходного напряжения около 10‑5/°С. При указанных на схеме значениях параметров на выходе получается стабилизированное напряжение 10 В. Эти приборы выпускаются в двухрядных корпусах мини‑DIP и могут работать при токах до 100 мА.
Температурные датчики, использующие UБЭ
Предсказуемостью изменения UБЭ с температурой можно воспользоваться при создании ИМС для измерения температуры. Например, REF‑02 помимо своей основной функции генерирует выходное напряжение, линейно изменяющееся с температурой. С помощью простых внешних схем можно получить выходное напряжение, сигнализирующее о температуре ИМС с точностью 1 % в диапазоне (от ‑55 до +125 °C). Схема AD590, используемая как чисто температурный датчик, дает точный ток 1 мкА/К. Это двухвыводное устройство. К нему надо приложить напряжение (4‑30 В) и можно измерять ток. LM334 также можно применять таким способом. Другие датчики, такие как LM35 и LM335, генерируют на выходе точное напряжение с крутизной +10 мВ/°С.
Трехвыводные прецизионные источники опорного напряжения
Как уже отмечалось, возможно создание источников опорного напряжения с отличной температурной стабильностью (до 10‑6/°С и даже лучше). Вот два способа получения таких источников.
1. Температурно стабилизированные источники опорного напряжения
Хороший подход к получению превосходной температурной стабильности источников опорного напряжения или других схем заключается в обеспечении работы источников опорного напряжения и, возможно, связанных с ними схем при постоянной повышенной температуре.
Можно добиться сильного уменьшения зависимости характеристик схемы от колебаний внешней температуры. Для прецизионной схемотехники представляет интерес метод помещения хорошо температурно‑компенсированного опорного источника в условия постоянной температуры, что значительно улучшает его характеристики.
Подобная техника температурно‑стабилизированных или «термостатированных» схем применяется уже много лет, в частности для создания сверхстабильных генераторов. Существуют не слишком дорогие источники питания и опорные источники напряжения, в которых используются термостатированные опорные схемы. Этот метод дает хорошие результаты, но имеет свои недостатки: громоздкость и сравнительно большую потребляемую нагревателем мощность, а также медленный разогрев и выход на режим (обычно 10 или более минут). Эти проблемы легко снять, если стабилизировать температуру на уровне кристалла ИМС (чипа) включением нагревательной схемы вместе с датчиком в состав самой интегральной схемы. Этот подход был впервые опробован в 60‑х годах фирмой Fairchild, выпустившей температурно‑стабилизированную дифференциальную пару μΑ726 и предусилитель постоянного тока μΑ727.
Позже появились «термостатированные» источники опорных напряжений, такие, как серия National LM199. ИМС этой серии имеют температурный коэффициент (типовое значение) 0,00002 %/°С, или 2·10‑7/°С. Такие опорные источники установлены в стандартных транзисторных корпусах ТО‑46. Их нагреватели потребляют мощность 0,25 Вт и разогреваются до нужной температуры за 3 с.
Пользуясь этими схемами, следует отдавать себе отчет в том, что последующие схемы на операционных усилителях, и даже проволочные прецизионные резисторы с их температурным коэффициентом ±2,5·10‑6/°С, могут сильно испортить характеристики, если при проектировании не принять крайних мер предосторожности. В частности, приходится учитывать даже дрейф прецизионных ОУ с очень низким уровнем дрейфа, таких, как ОР‑07, с типовым значением дрейфа входного каскада 0,2 мкВ/°С
При использовании LM399 существует одна опасность. Чип может выйти из строя, если напряжение питания нагревателя хотя бы на короткий момент времени упадет ниже 7,5 В. Источник опорного напряжения с запрещенной зоной LT1019 хотя и работает в нормальных условиях без подогрева, однако имеет встроенные в кристалл нагреватель и датчик. Поэтому его можно включать так же, как и LM399, получая температурный коэффициент менее 2·10‑6/°С. Однако в отличие от LM399 для LT1019 требуется некоторая внешняя схемная обвязка, чтобы получить термостат (ОУ и с полдюжины элементов).
2. Прецизионные источники опорного напряжения без подогрева
Термостатированная LM399 имеет превосходный температурный коэффициент, однако она не демонстрирует чего‑либо экстраординарного в отношении таких параметров, как шум или долговременный дрейф. Кроме того, нагрев этого кристалла занимает несколько секунд, и он потребляет большую мощность (4 Вт при включении, 250 мВт после стабилизации). Хитроумные разработчики сделали возможным создание источников опорного напряжения с эквивалентной стабильностью, но без подогрева. ИМС REF10KM и REF101KM имеют температурный коэффициент 10‑6/°С (макс), они не потребляют мощность для подогрева и у них нет задержки выхода на режим за счет нагрева. Кроме того, долговременный дрейф и шум у них меньше, чем у источников типа LM399. Среди других трехвыводных источников опорного напряжения с температурным коэффициентом не более 10‑6/°С – AD2710 или AD2712. В двухвыводной конфигурации есть лишь один достойный соперник ‑ это великолепный LTZ1000, у которого заявленный температурный коэффициент составляет 0,05·10‑6/°С. В спецификации на это устройство указаны также на порядок лучшие характеристики по долговременной стабильности и шуму, чем у любых других источников опорного напряжения любого типа. Для ИМС LTZ1000 требуется хорошая внешняя схема смещения, которую можно построить на ОУ и еще нескольких элементах. Во всех перечисленных высокостабильных источниках опорного напряжения (включая LM399 с подогревом) используются стабилитроны с захороненным слоем, что дополнительно обеспечивает намного меньший шум, чем обычные стабилитроны или UБЭ ‑стабилитроны


Аналого-цифровое преобразование для начинающих
Время на прочтение
8 мин
Количество просмотров 547K
В этой статье рассмотрены основные вопросы, касающиеся принципа действия АЦП различных типов. При этом некоторые важные теоретические выкладки, касающиеся математического описания аналого-цифрового преобразования остались за рамками статьи, но приведены ссылки, по которым заинтересованный читатель сможет найти более глубокое рассмотрение теоретических аспектов работы АЦП. Таким образом, статья касается в большей степени понимания общих принципов функционирования АЦП, чем теоретического анализа их работы.
 ”
”
Введение
В качестве отправной точки дадим определение аналого-цифровому преобразованию. Аналого-цифровое преобразование – это процесс преобразования входной физической величины в ее числовое представление. Аналого-цифровой преобразователь – устройство, выполняющее такое преобразование. Формально, входной величиной АЦП может быть любая физическая величина – напряжение, ток, сопротивление, емкость, частота следования импульсов, угол поворота вала и т.п. Однако, для определенности, в дальнейшем под АЦП мы будем понимать исключительно преобразователи напряжение-код.
Понятие аналого-цифрового преобразования тесно связано с понятием измерения. Под измерением понимается процесс сравнения измеряемой величины с некоторым эталоном, при аналого-цифровом преобразовании происходит сравнение входной величины с некоторой опорной величиной (как правило, с опорным напряжением). Таким образом, аналого-цифровое преобразование может рассматриваться как измерение значения входного сигнала, и к нему применимы все понятия метрологии, такие, как погрешности измерения.
Основные характеристики АЦП
АЦП имеет множество характеристик, из которых основными можно назвать частоту преобразования и разрядность. Частота преобразования обычно выражается в отсчетах в секунду (samples per second, SPS), разрядность – в битах. Современные АЦП могут иметь разрядность до 24 бит и скорость преобразования до единиц GSPS (конечно, не одновременно). Чем выше скорость и разрядность, тем труднее получить требуемые характеристики, тем дороже и сложнее преобразователь. Скорость преобразования и разрядность связаны друг с другом определенным образом, и мы можем повысить эффективную разрядность преобразования, пожертвовав скоростью.
Типы АЦП
Существует множество типов АЦП, однако в рамках данной статьи мы ограничимся рассмотрением только следующих типов:
- АЦП параллельного преобразования (прямого преобразования, flash ADC)
- АЦП последовательного приближения (SAR ADC)
- дельта-сигма АЦП (АЦП с балансировкой заряда)
Существуют также и другие типы АЦП, в том числе конвейерные и комбинированные типы, состоящие из нескольких АЦП с (в общем случае) различной архитектурой. Однако приведенные выше архитектуры АЦП являются наиболее показательными в силу того, что каждая архитектура занимает определенную нишу в общем диапазоне скорость-разрядность.
Наибольшим быстродействием и самой низкой разрядностью обладают АЦП прямого (параллельного) преобразования. Например, АЦП параллельного преобразования TLC5540 фирмы Texas Instruments обладает быстродействием 40MSPS при разрядности всего 8 бит. АЦП данного типа могут иметь скорость преобразования до 1 GSPS. Здесь можно отметить, что еще большим быстродействием обладают конвейерные АЦП (pipelined ADC), однако они являются комбинацией нескольких АЦП с меньшим быстродействием и их рассмотрение выходит за рамки данной статьи.
Среднюю нишу в ряду разрядность-скорость занимают АЦП последовательного приближения. Типичными значениями является разрядность 12-18 бит при частоте преобразования 100KSPS-1MSPS.
Наибольшей точности достигают сигма-дельта АЦП, имеющие разрядность до 24 бит включительно и скорость от единиц SPS до единиц KSPS.
Еще одним типом АЦП, который находил применение в недавнем прошлом, является интегрирующий АЦП. Интегрирующие АЦП в настоящее время практически полностью вытеснены другими типами АЦП, но могут встретиться в старых измерительных приборах.
АЦП прямого преобразования
АЦП прямого преобразования получили широкое распространение в 1960-1970 годах, и стали производиться в виде интегральных схем в 1980-х. Они часто используются в составе «конвейерных» АЦП (в данной статье не рассматриваются), и имеют разрядность 6-8 бит при скорости до 1 GSPS.
Архитектура АЦП прямого преобразования изображена на рис. 1

Рис. 1. Структурная схема АЦП прямого преобразования
Принцип действия АЦП предельно прост: входной сигнал поступает одновременно на все «плюсовые» входы компараторов, а на «минусовые» подается ряд напряжений, получаемых из опорного путем деления резисторами R. Для схемы на рис. 1 этот ряд будет таким: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) Uref, где Uref – опорное напряжение АЦП.
Пусть на вход АЦП подается напряжение, равное 1/2 Uref. Тогда сработают первые 4 компаратора (если считать снизу), и на их выходах появятся логические единицы. Приоритетный шифратор (priority encoder) сформирует из «столбца» единиц двоичный код, который фиксируется выходным регистром.
Теперь становятся понятны достоинства и недостатки такого преобразователя. Все компараторы работают параллельно, время задержки схемы равно времени задержки в одном компараторе плюс время задержки в шифраторе. Компаратор и шифратор можно сделать очень быстрыми, в итоге вся схема имеет очень высокое быстродействие.
Но для получения N разрядов нужно 2^N компараторов (и сложность шифратора тоже растет как 2^N). Схема на рис. 1. содержит 8 компараторов и имеет 3 разряда, для получения 8 разрядов нужно уже 256 компараторов, для 10 разрядов – 1024 компаратора, для 24-битного АЦП их понадобилось бы свыше 16 млн. Однако таких высот техника еще не достигла.
АЦП последовательного приближения
АЦП последовательного приближения реализует алгоритм «взвешивания», восходящий еще к Фибоначчи. В своей книге «Liber Abaci» (1202 г.) Фибоначчи рассмотрел «задачу о выборе наилучшей системы гирь», то есть о нахождении такого ряда весов гирь, который бы требовал для нахождения веса предмета минимального количества взвешиваний на рычажных весах. Решением этой задачи является «двоичный» набор гирь. Подробнее о задаче Фибоначчи можно прочитать, например, здесь: http://www.goldenmuseum.com/2015AMT_rus.html.
Аналого-цифровой преобразователь последовательного приближения (SAR, Successive Approximation Register) измеряет величину входного сигнала, осуществляя ряд последовательных «взвешиваний», то есть сравнений величины входного напряжения с рядом величин, генерируемых следующим образом:
1. на первом шаге на выходе встроенного цифро-аналогового преобразователя устанавливается величина, равная 1/2Uref (здесь и далее мы предполагаем, что сигнал находится в интервале (0 – Uref).
2. если сигнал больше этой величины, то он сравнивается с напряжением, лежащим посередине оставшегося интервала, т.е., в данном случае, 3/4Uref. Если сигнал меньше установленного уровня, то следующее сравнение будет производиться с меньшей половиной оставшегося интервала (т.е. с уровнем 1/4Uref).
3. Шаг 2 повторяется N раз. Таким образом, N сравнений («взвешиваний») порождает N бит результата.
Рис. 2. Структурная схема АЦП последовательного приближения.
Таким образом, АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину и текущее значение «весового» напряжения (на рис. 2. обозначен треугольником).
2. Цифро-аналоговый преобразователь (Digital to Analog Converter, DAC). Он генерирует «весовое» значение напряжения на основе поступающего на вход цифрового кода.
3. Регистр последовательного приближения (Successive Approximation Register, SAR). Он осуществляет алгоритм последовательного приближения, генерируя текущее значение кода, подающегося на вход ЦАП. По его названию названа вся данная архитектура АЦП.
4. Схема выборки-хранения (Sample/Hold, S/H). Для работы данного АЦП принципиально важно, чтобы входное напряжение сохраняло неизменную величину в течение всего цикла преобразования. Однако «реальные» сигналы имеют свойство изменяться во времени. Схема выборки-хранения «запоминает» текущее значение аналогового сигнала, и сохраняет его неизменным на протяжении всего цикла работы устройства.
Достоинством устройства является относительно высокая скорость преобразования: время преобразования N-битного АЦП составляет N тактов. Точность преобразования ограничена точностью внутреннего ЦАП и может составлять 16-18 бит (сейчас стали появляться и 24-битные SAR ADC, например, AD7766 и AD7767).
Дельта-сигма АЦП
И, наконец, самый интересный тип АЦП – сигма-дельта АЦП, иногда называемый в литературе АЦП с балансировкой заряда. Структурная схема сигма-дельта АЦП приведена на рис. 3.

Рис.3. Структурная схема сигма-дельта АЦП.
Принцип действия данного АЦП несколько более сложен, чем у других типов АЦП. Его суть в том, что входное напряжение сравнивается со значением напряжения, накопленным интегратором. На вход интегратора подаются импульсы положительной или отрицательной полярности, в зависимости от результата сравнения. Таким образом, данный АЦП представляет собой простую следящую систему: напряжение на выходе интегратора «отслеживает» входное напряжение (рис. 4). Результатом работы данной схемы является поток нулей и единиц на выходе компаратора, который затем пропускается через цифровой ФНЧ, в результате получается N-битный результат. ФНЧ на рис. 3. Объединен с «дециматором», устройством, снижающим частоту следования отсчетов путем их «прореживания».

Рис. 4. Сигма-дельта АЦП как следящая система
Ради строгости изложения, нужно сказать, что на рис. 3 изображена структурная схема сигма-дельта АЦП первого порядка. Сигма-дельта АЦП второго порядка имеет два интегратора и две петли обратной связи, но здесь рассматриваться не будет. Интересующиеся данной темой могут обратиться к [3].
На рис. 5 показаны сигналы в АЦП при нулевом уровне на входе (сверху) и при уровне Vref/2 (снизу).

Рис. 5. Сигналы в АЦП при разных уровнях сигнала на входе.
Более наглядно работу сигма-дельта АЦП демонстрирует небольшая программа, находящаяся тут: http://designtools.analog.com/dt/sdtutorial/sdtutorial.html.
Теперь, не углубляясь в сложный математический анализ, попробуем понять, почему сигма-дельта АЦП обладают очень низким уровнем собственных шумов.
Рассмотрим структурную схему сигма-дельта модулятора, изображенную на рис. 3, и представим ее в таком виде (рис. 6):
Рис. 6. Структурная схема сигма-дельта модулятора
Здесь компаратор представлен как сумматор, который суммирует непрерывный полезный сигнал и шум квантования.
Пусть интегратор имеет передаточную функцию 1/s. Тогда, представив полезный сигнал как X(s), выход сигма-дельта модулятора как Y(s), а шум квантования как E(s), получаем передаточную функцию АЦП:
Y(s) = X(s)/(s+1) + E(s)s/(s+1)
То есть, фактически сигма-дельта модулятор является фильтром низких частот (1/(s+1)) для полезного сигнала, и фильтром высоких частот (s/(s+1)) для шума, причем оба фильтра имеют одинаковую частоту среза. Шум, сосредоточенный в высокочастотной области спектра, легко удаляется цифровым ФНЧ, который стоит после модулятора.
Рис. 7. Явление «вытеснения» шума в высокочастотную часть спектра
Однако следует понимать, что это чрезвычайно упрощенное объяснение явления вытеснения шума (noise shaping) в сигма-дельта АЦП.
Итак, основным достоинством сигма-дельта АЦП является высокая точность, обусловленная крайне низким уровнем собственного шума. Однако для достижения высокой точности нужно, чтобы частота среза цифрового фильтра была как можно ниже, во много раз меньше частоты работы сигма-дельта модулятора. Поэтому сигма-дельта АЦП имеют низкую скорость преобразования.
Они могут использоваться в аудиотехнике, однако основное применение находят в промышленной автоматике для преобразования сигналов датчиков, в измерительных приборах, и в других приложениях, где требуется высокая точность. но не требуется высокой скорости.
Немного истории
Самым старым упоминанием АЦП в истории является, вероятно, патент Paul M. Rainey, «Facsimile Telegraph System,» U.S. Patent 1,608,527, Filed July 20, 1921, Issued November 30, 1926. Изображенное в патенте устройство фактически является 5-битным АЦП прямого преобразования.

Рис. 8. Первый патент на АЦП

Рис. 9. АЦП прямого преобразования (1975 г.)
Устройство, изображенное на рисунке, представляет собой АЦП прямого преобразования MOD-4100 производства Computer Labs, 1975 года выпуска, собранный на основе дискретных компараторов. Компараторов 16 штук (они расположены полукругом, для того, чтобы уравнять задержку распространения сигнала до каждого компаратора), следовательно, АЦП имеет разрядность всего 4 бита. Скорость преобразования 100 MSPS, потребляемая мощность 14 ватт.
На следующем рисунке изображена продвинутая версия АЦП прямого преобразования.

Рис. 10. АЦП прямого преобразования (1970 г.)
Устройство VHS-630 1970 года выпуска, произведенное фирмой Computer Labs, содержало 64 компаратора, имело разрядность 6 бит, скорость 30MSPS и потребляло 100 ватт (версия 1975 года VHS-675 имела скорость 75 MSPS и потребление 130 ватт).
Литература
W. Kester. ADC Architectures I: The Flash Converter. Analog Devices, MT-020 Tutorial. www.analog.com/static/imported-files/tutorials/MT-020.pdf
W. Kester. ADC Architectures II: Successive Approximation ADC. Analog Devices, MT-021 Tutorial. www.analog.com/static/imported-files/tutorials/MT-021.pdf
W. Kester. ADC Architectures III: Sigma-Delta ADC Basics. Analog Devices, MT-022 Tutorial. www.analog.com/static/imported-files/tutorials/MT-022.pdf
W. Kester. ADC Architectures IV: Sigma-Delta ADC Advanced Concepts and Applications. Analog Devices, MT-023 Tutorial. www.analog.com/static/imported-files/tutorials/MT-023.pdf
В
любой схеме стабилизатора компенсационного
типа требуется опорное напряжение, с
которым сравнивается величина выходного
напряжения. Стабильность выходного
напряжения стабилизатора не может быть
выше стабильности его источника опорного
напряжения. Источники опорного напряжения
(ИОН) широко применяются также в качестве
эталонной меры в аналого-цифровых и
цифроаналоговых преобразователях, а
также в разного рода пороговых устройствах.
Основное
назначение ИОН
— создавать образцовое напряжение,
которое могло бы быть использовано
электронными устройствами преобразования
информации в качестве меры, эталона.
ИОН
на стабилитронах
Простейший
метод получения опорного напряжения
состоит в том, что нестабилизированное
входное напряжение прикладывают через
токоограничивающий резистор к
стабилитрону, который играет роль так
называемого параметрического
стабилизатора, чей основной параметр
— напряжение пробоя обратносмещенного/ья-перехода
(Рис. 5а.).
Полупроводниковый
стабилитрон, представляющий собой
разновидность диода обладает характерной
вольтамперной характеристикой (Рис.
6).__


Рис.
5. Схемы
ИОН на стабилитронах: а
— параметрический
ИОН, б
— ИОН
компенсационного типа

Рис.
6. Вольтамперная
характеристика стабилитрона
При
определенном обратном напряжении
происходит пробой/?-п-перехода, причем
вследствие конструктивных и технологических
особенностей этот пробой не приводит
к выходу прибора из строя. Участок
вольтамперной характеристики,
соответствующий режиму пробоя, расположен
почти вертикально, так что при изменении
тока через стабилитрон напряжение на
нем меняется мало.
Качество
стабилизации оценивается коэффициентом
Кст
=
![]()
VIN
/
![]()
VREF>
который
называется коэффициентом
стабилизации.
Для схемы на Рис.5а коэффициен стабилизации
КСТ
= 1 + R / r cт
~ R / r ст
и
составляет обычно от 10 до 100. Здесь гст
— дифференциальное (динамическое)
сопротивление стабилитрона. Оно
приблизительно обратно пропорционально
току, протекающему через стабилитрон,
поэтому при заданном входном напряжении
увеличением сопротивления резистора
R невозможно добиться повышения
коэффициента стабилизации. Важным
фактором для выбора стабилитрона
является величина шумовой составляющей
напряжения стабилизации, которая сильно
возрастает при малых величинах тока.
Недостатком схемы на Рис. 5а является
относительно высокое выходное
сопротивление (десятки Ом), которое
также возрастает при уменьшении тока
через стабилитрон. Другим недостатком
является большой разброс напряжений
стабилизации, который даже для прецизионных
стабилитронов достигает 5% от номинального
значения.
Существенного
повышения коэффициента стабилизации
можно достичь, если токоограничивающий
резистор заменить источником стабильного
тока, например на полевом транзисторе
(Рис. 7).
В
этом случае может превысить 1000.

Рис.
7. Источник опорного напряжения с полевым
транзистором
Можно
заметно улучшить характеристики
источника опорного напряжения, если
использовать в его составе операционный
усилитель (Рис.56), т. е. выполнить ИОН по
схеме стабилизатора напряжения
компенсационного типа, Коэффициент
стабилизации в такой схеме определяется
главным образом коэффициентом подавления
нестабильности питания А^пп в используемом
ОУ и может достигать величины порядка
10000. Выходное сопротивление этой схемы
составляет десятые доли Ом. Поскольку
напряжения на входах ОУ практически
равны, выходное напряжение ИОН
VOUT
=
VREF
(1 + R2
/R1)
В
схеме на Рис. 56 выходное напряжение ИОН
не может быть меньше напряжения
стабилизации стабилитрона. Если требуется
более низкое напряжение, то между
стабилитроном и неинвертирующим входом
усилителя включается резистивный
делитель. Так устроен, например, источник
опорного напряжения AD586. Применение ОУ
позволяет также путем подгонки соотношения
сопротивлений резисторов R2
/R1
достичь
высокой точности установки опорного
напряжения.
В
итоге, колебания выходного напряжения
ИОН, выполненного по схеме на Рис. 5.б,
при реальных изменениях входного
напряжения и нагрузки не превышают 1
мВ. Существенно болешие значения имеют
температурные колебания опорного
напряжения. Температурный коэффициент
напряжения стабилизации стабилитрона
(ТКН) определяется как отношение
относительного приращения напряжения
стабилизации к приращению температуры
ТКН
=
![]() VCT/
VCT/
( VCT![]() T).
T).
Для
большинства стабилитронов он находится
в пределах + /—1*10-3К-1.
Для
малых напряжений стабилизации он
отрицателен, для больших — положителен.
Это вызвано тем, что в стабилитронах
имеют место два механизма пробоя:
туннельный, проявляющийся на низких
напряжениях (его напряжение имеет
отрицательный ТКН), и вторичный
(зенеровский), для которого характерен
положительный ТКН, существенный на
больших напряжениях. Минимума по
абсолютной величине этот коэффициент
достигает при напряжениях стабилизации
около 6 В, причем напряжение, соответствующее
нулевому ТКН, зависит от тока через
стабилитрон. Стабилитроны, имеющие ТКН
в пределах +10-5
К-1,
называют опорными диодами и обычно
используют в схемах ИОН на напряжения,
превышающие 7.5 В. Примером такого
источника опорного напряжения может
служить ИМС МАХ671С, обеспечивающая
выходное напряжение 10 В с точностью
0.01% при КСТ = 20000, ТКН = 310-6
К–1
и токе потребления 9 мА. Другой пример
— AD586 (отечественный аналог — 1009ЕН2)
создает выходное напряжение 5 В с
точностью 0.05% при А”сх = 10000, ТКН = 210-6
К-1
и токе потребления 3 мА.
Рекордными
характеристиками для этого класса ИОН
обладает 5-вольтовая ИМС VRE3050 производства
фирмы «Thaler Corporation» — ТКН = 0.6-10-6
К-1,
точность 0.01%, выходное сопротивление
0.025 Ом.
Для
повышения температурной стабильности
в некоторые ИМС источников опорного
напряжения (например, LM199/299/399, отечественный
аналог — 2С483) встраивают термостаты с
нагревательным элементом. Обе части
схемы (нагреватель и ИОН) изготавливаются
на одном кристалле, который помещается
в теплоизолированном корпусе. Это
позволяет достичь ТКН <
1х10-6
К-1
в
диапазоне температур—25°С…+85°С, причем
время, требуемое для установления
рабочего режима после включения,
составляет всего 3 с. Недостаток такого
решения — довольно большая мощность,
потребляемая этим источником опорного
напряжения (около 400 мВт при 25°С).__
Параметры
источников опорного напряжения
Точностные
параметры
Основное
назначение ИОН — создавать образцовое
напряжение, которое могло бы быть
использовано электронными устройствами
преобразования информации в качестве
меры, эталона. Поэтому главное требование
к ИОН —поддерживать выходное напряжение
неизменным, равным номинальному значению
в условиях изменяющегося входного
напряжения, токов нагрузки, температуры
окружающей среды и старения элементов.
К
точностным параметрам ИОН относятся:
начальная
точность установки выходного напряжения
в нормальных условиях,
коэффициент
стабилизации по входному напряжению,
коэффициент
стабилизации по току нагрузки,
температурный
коэффициент напряжения, тепловой
гистерезис,
временная
нестабильность, шум выходного напряжения.
Начальная
точность установки выходного напряжения
зависит в основном от технологических
факторов. Отклонения выходного напряжения
от номинального значения вызваны
разбросом элементов, входящих в состав
ИОН. Точность установки повышают путем
лазерной подгонки сопротивлений
резисторов схемы.
Коэффициент
стабилизации по входному напряжению
определяется как отношение приращения
входного напряжения к вызываемому им
приращению выходного напряжения ИОН:
КСТ
=
![]() Vin
Vin
/![]() VREF
VREF
Иногда
в справочниках приводится нестабильность
по напряжению как абсолютное изменение
выходного напряжения в мВ, процентах
или миллионных долях (ppm) при изменении
входного напряжения в заданных пределах.
Повышение коэффициента стабилизации
достигается увеличением коэффициента
усиления контура регулирования.
Коэффициент
стабилизации по току
нагрузки характеризует стабильность
выходного напряжения стабилизатора
при изменении тока нагрузки. Обычно под
этим коэффициентом понимают относительное
изменение выходного напряжения при
изменении тока нагрузки в заданных
пределах в процентах или миллионных
долях от номинальной величины. Используются
также термины «нестабильность
по току нагрузки»
и «выходное
дифференциальное сопротивление»:
![]() VOUT
VOUT
=
![]() VREF
VREF
//![]() IL
IL
которое
измеряется в Ом. Этот параметр также
существенно зависит от коэффициента
усиления контура регулирования. Для
уменьшения влияния выходного тока при
работе ИОН на удаленную нагрузку широко
используется кельвиновское (т. е.
четырехпроводное) подключение (при этом
напряжение обратной связи снимается
непосредственно с входных зажимов
питания устройства-потребителя). Для
этого некоторые модели прецизионных
ИОН, например AD588, имеют специальные
выводы.
Выходное
сопротивление для трехвыводных
параллельных ИОН зависит от коэффициента
передачи Р внешнего делителя в цепи
обратной связи. Если ROUT
— выходное сопротивление при отсутствии
внешнего делителя, то при включении
делителя оно увеличивается
![]()
Температурный
коэффициент
выходного
напряжения
характеризует нестабильность выходного
напряжения ИОН при изменении температуры
окружающей среды. Это вторая по важности
после точности установки выходного
напряжения (а в некоторых случаях даже
первая) точностная характеристика. Для
многих изготовителей измерительных
приборов ТКН менее 10-6/°С
позволяет избавиться от системной
температурной калибровки — медленного
и дорогостоящего процесса. Существует
несколько методов определения ТКН. Один
из них состоит в определении ТКН как
тангенса угла наклона касательной к
графику зависимости опорного напряжения
от температуры:
ТНК
=
![]()
RREF/![]() T ° . (5.18)
T ° . (5.18)
Однако
в силу того, что эта зависимость не
только не линейна, но даже и не монотонна,
ТКН, определенный по формуле (5.18),
сам очень сильно зависит от температуры.
Обычно применяется метод поля, при
котором задается поле допуска на
отклонения опорного напряжения от
номинального значения в заданном
температурном диапазоне.

Рис.
8. График зависимости опорного напряжения
прецизионного ИОН AD588 от температуры
На
Рис. 8 представлен график зависимости
опорного напряжения от температуры для
прецизионного ИОН AD588. Эта зависимость
(ее называют S-образной) характерна для
ИОН на основе стабилитронов с так
называемым ≪захороненным
≫
слоем (или скрытым Зене- ровским
переходом). Очевидно, что ТКН, вычисленный
по формуле (5.18),
ни в какой мере не определяет действительные
границы, в которых должно оставаться
опорное напряжение при изменении
температуры в рабочем диапазоне. Поэтому
обычно ТКН вычисляют по формуле
 .
.
(5.19)
Например,
для AD588 формула (5.19)
дает ТКН = 0.95 • 10-6/°С
Определенный таким образом ТКН равен
тангенсу угла наклона диагонали
прямоугольника, построенного на Рис.
8.
На
вид
зависимости
опорного напряжения
от температуры существенно влияет
величина его начального значения.
Это
вызвано тем, что, в свою очередь, величина
опорного напряжения конкретного ИОН
связана с точностью компенсации ТКН
его базового опорного элемента .
Недокомпенсация ведет к снижению RREF
, а перекомпенсация наоборот, к его
увеличению. На Рис. 9 приведены графики
зависимости опорного напряжения от
температуры для трех образцов ИОН типа
TL431.

Рис.
9. Графики зависимостей опорного
напряжения трех образцов ИОН TL431 от
температуры
Видно,
что при недокомпенсации в диапазоне
температур преобладает отрицательный
ТКН (если его определять по формуле
(5.18)), а при перекомпенсации — положительный.
В
справочниках часто приводится так
называемая «температурная стабильность»,
под которой понимают относительное
изменение выходного напряжения в
процентах от номинальной величины при
изменении температуры окружающей среды
в допустимых для данной ИМС пределах.
Используется также термин «температурный
дрейф выходного напряжения», определяемый
отношением
![]()
RREF
/(
RREF_NOM
T°)
и измеряемый в мВ/(°С * В).
Тепловой
гистерезис
— неоднозначность изменения опорного
напряжения в результате изменения
температуры. Он проявляется в том, что
при нагреве ИОН и последующем возврате
к исходной температуре, его опорное
напряжение не всегда принимает
первоначальное значение. Тепловой
гистерезис трудно компенсировать, и
зачастую он является главным источником
погрешности при температурных колебаниях
с амплитудой 25°С и больше. Изготовители
ИОН сравнительно недавно начали включать
данные о тепловом гистерезисе своих
изделий в техническую документацию.
Например, для ИОН на ширине запрещенной
зоны МАХ6250 тепловой гистерезис при
изменении температуры в последовательности
25°С —> 50°С —> 25°С равен 20 мкВ, что
сопоставимо с отклонением опорного
напряжения при изменении температуры
на 7°С.__

Рис.
10. График спектральной плотности шума
для прецизионного ИОН AD588
Долговременная
нестабильность
(временной дрейф) определяет относительное
изменение выходного напряжения в
процентах от номинального значения за
1000 часов работы при температуре окружающей
среды, соответствующей верхней границе
рабочего диапазона. Для ИОН на стабилитронах
типичное значение временного дрейфа
составляет 610-6
за 1000 часов и уменьшается по затухающей
экспоненте. Дополнительная термотренировка
улучшает временную стабильность ИОН
на стабилитроне. XFET источники опорного
напряжения имеют превосходную
долговременную стабильность — 0.2*10-6
за 1000 часов.
Шум
опорного напряжения характерен
для ИОН, так же как и для ОУ, но интенсивность
шума ИОН значительно превосходит таковую
для ОУ. Шум опорного напряжения вносит
ошибку в измерения. В опорном напряжении
преобладают два типа шума: фликкер-шум
(1/f)
и тепловой (белый). График спектральной
плотности шума опорного напряжения для
прецизионного AD588 представлен на
Рис.10.Широкополосный тепловой шум может
быть заметно сглажен путем подключения
параллельно выходу ИОН конденсатора.
На Рис. 11 можно видеть степень влияния
на спектральную плотность шума ИМС
МАХ6225 конденсатора емкостью 1 мкФ,
подключенного параллельно выходу ИМС.

Рис.
11. Влияние шунтирующего конденсатора
на спектральную плотность шума
Однако
не все модели ИОН допускают непосредственное
подключение конденсатора без потери
устойчивости Решением здесь может быть
подключение нагрузки к ИОН через
RC-фильтр
первого порядка. На Рис. 12 приведен
график зависимости действующего значения
напряжения шума на выходе RC
-фильтра, подключенного к ИОН типа
LT1004-2.5 от его частоты среза.

Рис.
12. График зависимости действующего
значения шума опорного напряжения ИОН
от частоты среза выходного фильтра
Поскольку
в отличие от ОУ выходное напряжение ИОН
меняться не должно, можно использовать
фильтр с большой постоянной времени.
К
сожалению, применение /?С-фильтра приводит
к увеличению выходного сопротивления
ИОН на низких частотах. Это нежелательно,
если входное сопротивление приемника
сигнала от ИОН низкое, особенно если
оно меняется, как, например у цифроаналогового
преобразования с инверсной резистивной
матрицей. Поэтому сопротивление резистора
фильтра выбирают порядка 20 Ом.
В
стабилитронных ИОН конденсатор для
снижения шума может быть подключен
непосредственно параллельно стабилитрону
либо параллельно неинвертирующему
входу усилителя, входящего в состав ИОН
(см. Рис. 56), как это, например, предусмотрено
у прецизионного AD587. При этом условия
устойчивости ИОН не ухудшаются, поскольку
конденсатор не входит в контур обратной
связи.
К
основным динамическим параметрам
источников опорного напряжения относятся
коэффициент подавления пульсаций,
полное выходное сопротивление и время
установления после включения.
Коэффициент
подавления пульсаций Кцц
определяется как отношение (в дБ) амплитуд
основной гармоники пульсаций напряжения
на выходе и входе ИОН при его питании
от пульсирующею напряжения (например,
выходным напряжением двухполупериодного
выпрямителя без фильтра). Обычно
приводится в технической документации
в виде частотной характеристики. Значение
этого коэффициента в области низких
частот определяется частотной
характеристикой контура регулирования
ИОН, в частности коэффициентом усиления
петли и частотой среза, а в области
высоких частот — емкостью и частотными
свойствами выходного конденсатора,
если он есть. На Рис. 13 представлен график
зависимости коэффициента подавления
пульсаций от частоты
для AD291.__

Рис.
13. График зависимости коэффициента
подавления пульсаций от частоты для
ИМС AD291

Рис.
14. Графики зависимости от частоты модуля
полного выходного сопротивления ИМС
МАХ6225
Полное
выходное сопротивление
Z0UT
характеризует способность источника
опорного напряжения компенсировать
изменение выходного напряжения при
изменении тока нагрузки. Задается, как
правило, в виде графика в функции от
частоты изменения тока нагрузки. Так
же, как и Кпп в области низких частот
определяется усилительными свойствами
контура регулирования, а в области
высоких частот полным сопротивлением
выходного конденсатора. На Рис. 14
представлены графики зависимости от
частоты модуля полного выходного
сопротивления ИМС МАХ6225 для втекающего
/ етек> и вытекающего / вытек. Выходных
токов силой 5 мА.
В
фирменных описаниях микросхем ИОН часто
приводятся графики переходных
характеристик — зависимости от времени
опорного напряжения при скачкообразном
изменении входного напряжения или тока
нагрузки.
Время
установления после включения — время,
в течение которого опорное напряжение
устанавливается с заданной точностью
после подачи питания. У большинства ИОН
опорное напряжение устанавливается до
0.1% за время менее 10 мкс. Этот параметр
важен для систем с батарейным питанием,
поскольку в этом случае целесообразно
подавать питание на узлы системы только
на короткое время их работы.
К
важнейшим эксплуатационным параметрам
ИОН относятся:
• диапазон
допустимых входных напряжений;
• максимально
допустимый ток нагрузки;
• максимально
допустимая рассеиваемая мощность;
• минимально
допустимое напряжение между входом и
выходом ИОН при максимальном или
дополнительно оговоренном токе нагрузки;
• ток,
потребляемый ИОН в режиме холостого
хода (часто называемый током утечки);
• допустимый
диапазон температур окружающей среды.
В
фирменных описаниях микросхем ИОН часто
приводятся графики переходных
характеристик — зависимости от времени
опорного напряжения при скачкообразном
изменении входного напряжения или тока
нагрузки.
Время
установления после включения
— время, в течение которого опорное
напряжение устанавливается с заданной
точностью после подачи питания. У
большинства ИОН опорное напряжение
устанавливается до 0.1% за время менее
10 мкс. Этот параметр важен для систем с
батарейным питанием, поскольку в этом
случае целесообразно подавать питание
на узлы системы только на короткое время
их работы.
К
важнейшим эксплуатационным параметрам
ИОН относятся:
• диапазон
допустимых входных напряжений;
• максимально
допустимый ток нагрузки;
• максимально
допустимая рассеиваемая мощность;
• минимально
допустимое напряжение между входом и
выходом ИОН при максимальном или
дополнительно оговоренном токе нагрузки;
• ток,
потребляемый ИОН в режиме холостого
хода (часто называемый током утечки);
• допустимый
диапазон температур окружающей среды.
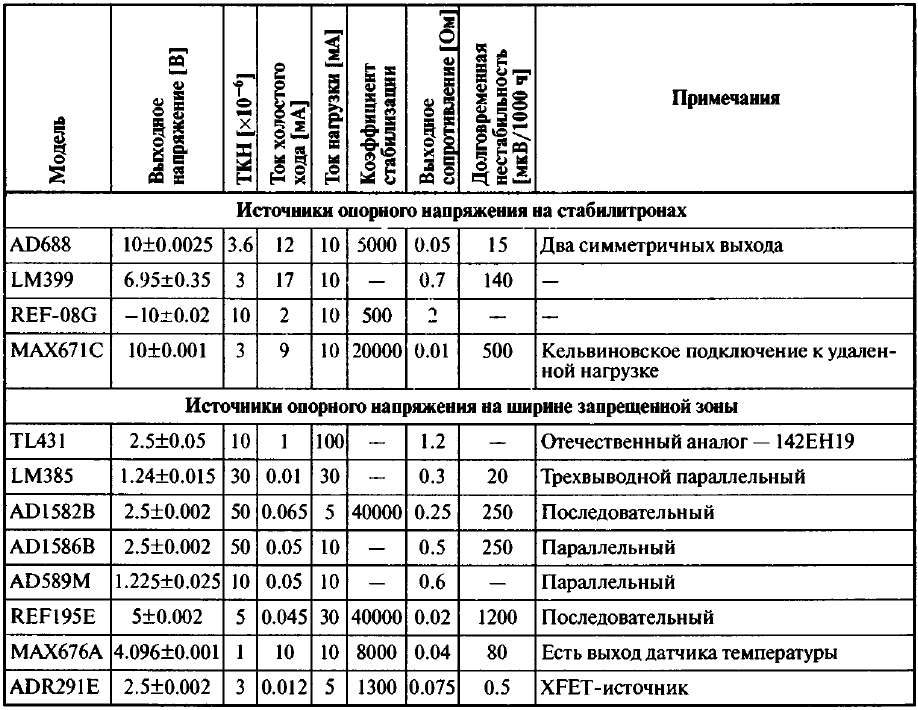
Таблица
5.2. Основные параметры ИС источников
опорного напряжения
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
11.05.2015673.5 Кб32Раздел VI.docx
- #
- #
В устройствах аналого-цифрового и цифро-аналогового преобразования встречаются миниатюрные микросхемы, часто всего с 3 выводами. Несмотря на их кажущуюся простоту, они играют ключевую роль в процессе обработки сигналов. Речь идет об источниках опорного напряжения (ИОН) для преобразователей АЦП и ЦАП.
Опорные источники для АЦП и ЦАП
Одной из самых больших проблем для разработчиков устройств с аналого-цифровыми или цифро-аналоговыми преобразователями является достижение приемлемо низкого уровня шума. Проблема становится тем более существенной, чем выше разрешающая способность преобразователя. Хотя во многих случаях достаточно 8-битных преобразователей (например многих осциллографов бюджетного класса), есть и такие, что требуют минимум 24-битной обработки. Например, фармацевтические лабораторные весы, которые, имея диапазон измерения 2,1 г, должны измерять с разрешением 0,1 мкг. В этом случае требуемое разрешение преобразователя больше 24 бит. Для достижения такого требуется сигнальная цепочка со сверхнизким уровнем шума.
Параллельный и последовательный ИОН
На рисунке показан пример подключения опорного напряжения к аналого-цифровому и цифро-аналоговому преобразователю. В обоих случаях опорное напряжение VREF выступает мерой, по которой сравнивается аналоговое входное напряжение, в результате этого сравнения в АЦП создается цифровой сигнал или по которому в АЦП формируется аналоговый сигнал. Видно, что качество опорного напряжения в значительной степени зависит от качества выходного сигнала, будь то цифровой или аналоговый. По мере увеличения разрешения преобразователя растут и требования к опорному напряжению. Обычно используемые монолитные чипы опорных источников выдают стабильные выходные напряжения, устойчивые к изменениям температуры окружающей среды и нагрузок, не чувствительны к входному напряжению, а их параметры сохраняют высокую стабильность во времени. Большинство АЦП и ЦАП с разрядностью 8 бит содержат встроенные ИОН. По технологическим причинам это обычно источники относительно низкого качества.

На практике используются две основные конфигурации эталонных источников. Это шунтирующие и последовательные. Они показаны на рисунке ниже. В последовательном источнике выходной ток протекает через последовательный транзистор, расположенный между входом VIN и выходом VREF. Такой источник можно считать прецизионным слаботочным линейным стабилизатором. Последовательный источник характеризуется меньшей потребляемой мощностью по сравнению с аналогичным шунтирующим ИОН. В принципе, для правильной работы шунтирующего источника не требуется избыточный ток. Эта разница становится незначительной, если ток нагрузки ниже 200 мкА. Наиболее важным является то, что оба типа источников демонстрируют одинаковую точность формирования опорного напряжения.

В целом, шунтирующие источники демонстрируют большую гибкость в отношении входных напряжений, они лучше подавляют шум входного напряжения, их проще использовать для построения источников отрицательных опорных напряжений, и реализовать ИОН с плавающими выходами.
На схемах источники опорного напряжения часто маркируются стабилитроном. Это могло бы предполагать использование в данном случае шунтирующего источника, но такой элемент схемы часто имеет лишь символическое значение и может быть с успехом заменен последовательным источником.
Технические характеристики ИОН
Параметры эталонных источников напряжения включены в документацию в унифицированном виде, как и параметры всех интегральных микросхем. Рассмотрим наиболее важные из них.
Температурный коэффициент
Зависимость напряжения VREF от температуры обозначена символом TC. Это температурный коэффициент, также известный как дрейф. Выражается в единицах ppm/°C (одна миллионная часть на градус Цельсия). Для установления внимания удобно представить это соотношение в виде полинома:
TC1 представляет температурную зависимость первого порядка (линейную), TC2 второго порядка и так далее. Все факторы выше первого порядка обычно объединяются и описываются как кривизна дрейфа.
Большинство монолитных чипов опорного напряжения основаны на зонных источниках (с запрещенной зоной). Опорное напряжение формируется путем суммирования напряжения, пропорционального абсолютной температуре (PTAT), с напряжением база-эмиттер дополнительного к абсолютной температуре (CTAT). В результате получается напряжение примерно 1,2 В, при котором TC1 близок к нулю. Коэффициенты TC более высокого порядка достигают ненулевых значений, поскольку напряжения PTAT и CTAT не являются идеально линейными. Обычно TC2 является доминирующим фактором. Источники, рассчитанные на дрейф менее 20 ppm/°C, чаще всего требуют специальных схем для минимизации TC2.
В других распространенных источниках опорное выходное напряжение формируется внутренним напряжением стабилитрона и напряжением база-эмиттер биполярного транзистора. Это позволяет создать стабильный ИОН порядка 7 В. По параметрам источники на стабилитронах аналогичны зонным источникам, но их шумовые свойства лучше. Источники на стабилитронах обычно требуют более высоких токов покоя и должны иметь напряжение питания выше 7,2 В. Поэтому их нельзя использовать в схемах с низким напряжением (3,3 или 5 В).

Температурный коэффициент может задаваться для нескольких различных диапазонов температур, включая коммерческий (0…70°С), промышленный (–40…85°С) и расширенный (–40…125°С). Температурные коэффициенты определяются несколькими методами, наиболее распространенным из которых является коробочный метод. Здесь TC рассчитывается на основе методов VREF и определяется в конечных точках диапазона (Tmin … Tmax). Ни один из методов не идеален. Недостатком метода конечных точек является то, что он не принимает во внимание какую-либо кривизну дрейфа (TC2, TC3 и т. д.). Расчет приращения TC от комнатной температуры до минимальной и максимальной температуры улучшает ситуацию, поскольку информацию о TC2 можно получить из трех точек вместо двух. Несмотря на то, что “коробочный” метод является более точным, чем метод конечной точки, TC может быть недооценен. Это так, если диапазон температур устройства меньше диапазона, в котором был указан ТС.
Начальная точность
Этот параметр определяет насколько близко к номинальному напряжению напряжение опорного источника при комнатной температуре и заданных условиях поляризации. Эта точность обычно указывается в процентах от 0,01% до 1% (100 … 10 000 частей на миллион). Например, опорное напряжение 2,5 В с начальной точностью 0,1 % должно находиться в диапазоне от 2,4975 В до 2,5025 В при комнатной температуре. Важность начальной точности зависит главным образом от того, откалибрована ли система обработки данных. Источники с внутренним стабилитроном имеют очень низкую начальную точность (5…10%) и в этом случае необходима калибровка.
Пиковый шум источника
Собственный шум источника опорного напряжения вызывает динамические ошибки, которые снижают отношение сигнал/шум (SNR) передатчика. Это вызывает снижение эффективного разрешения (ENOB). В документациях приведены два параметра шума. Один имеет дело разницей в максимальных и минимальных измерениях VREF во всем диапазоне температур, а в низкочастотном — с широкополосным шумом. Широкополосный шум определяется как среднеквадратичное напряжение шума в полосе частот от 10 Гц до 10 кГц и выражается в микровольтах. Этот шум можно относительно легко свести к минимуму с помощью конденсатора большой емкости, подключенного к выходу VREF. Влияние широкополосного шума зависит от ширины полосы обрабатываемого сигнала. В одних случаях этот шум будет больше, в других меньше. Низкочастотный шум напряжения VREF определяется в диапазоне от 0,1 до 10 Гц как размах напряжения. Он выражается в единицах мкВ или ppm. Поскольку фильтрация ниже 10 Гц нецелесообразна, низкочастотный шум составляет значительную часть общего шума, внося свой вклад в погрешность опорного напряжения.
Низкочастотный шум определяется с помощью активного полосового фильтра, состоящего из ячейки фильтра верхних частот 1-го порядка с частотой среза 0,1 Гц, за которой следует ячейка фильтра нижних частот n-го порядка с частотой среза 10 Гц. Установка фильтра нижних частот в таком порядке оказывает значительное влияние на измеренное значение размаха шума. Использование фильтра нижних частот 2-го порядка уменьшает размах 10 Гц на 50 % по сравнению с фильтром 1-го порядка.
Шум в диапазоне от 0,1 до 10 Гц называется фликер-шумом (1/f), он генерируется в источниках с запрещенной зоной и резисторах, поэтому масштабируется линейно с напряжением VREF. Например ИОН на 5 вольт будет иметь пиковое значение в 2 раза больше, чем источник на 2,5 вольта, помещенный в тот же компонент. Уменьшение этого шума в источнике с запрещенной зоной требует более высокого тока и больших размеров компонентов. Такие цепи эталонного источника с низким уровнем шума (<5 мкВ пик-пик), как правило, имеют большие токи покоя в диапазоне от сотен микроампер до миллиампер, а также корпуса большего размера. Источники с внутренними стабилитронами имеют наилучшие шумовые параметры. Этому способствует отсутствие каскада усиления. Цепи с запрещенной зоной имеют коэффициент усиления с обратной связью от 15 В/В до 20 В/В, что также приводит к усилению шума, создаваемого в самом источнике и в резисторе.
Термический гистерезис
Это параметр определяет сдвиг напряжения VREF из-за одного или нескольких скачков температуры. Термический гистерезис выражается в частях на миллион. Кроме того, следует также учитывать тепловое отклонение, определяемое как изменение температуры от комнатной до минимальной или максимальной температуры с последующим возвратом к комнатной температуре (например, 25°C -> 125°C -> 25°C). Вышеуказанные параметры, то есть диапазон температур (коммерческий, промышленный, расширенный) и определение теплового прогиба, могут различаться от производителя к производителю, что затрудняет сравнение. Термические вариации в более широком диапазоне температур обычно приводят к большему изменению VREF. Даже если температурный диапазон приложения узок, это тепловой всплеск при пайке микросхемы на печатную плату, а различные другие температурные явления вызывают тепловой гистерезис. Его основной причиной является термомеханическое воздействие на структуру микросхемы.
Таким образом тепловой гистерезис возникает не только в результате изменения температуры, но и под влиянием таких факторов, как возможные деформации корпуса, изменение параметров пластиковых компонентов, используемых для изготовления радиоэлемента, изменение крепления конструкции к корпусу, а также изменения самой конструкции.
Долговременная стабильность
Долговременная стабильность описывает типичные изменения VREF после 1000 часов непрерывной работы при номинальных условиях. Этот параметр позволяет оценить стабильность опорного напряжения в течение всего срока службы. Считается, что большинство изменений VREF происходит в течение первых 1000 часов, поскольку долговременная стабильность показывает логарифмическую зависимость от времени. Такое длительное время измерения неприемлемо в производственных условиях, поэтому долговременную стабильность определяют на небольшй партии чипов при комнатной температуре и принимают за типичную. Необратимые изменения напряжения на плате могут возникнуть после сборки источника опорного напряжения на печатной плате. Это может вызвать постоянное смещение VREF. Разработчик устройства должен размещать источники VREF в таких местах на печатной плате, которые меньше всего подвержены механической деформации. Элементы, заключенные в металлические корпуса, обладают наибольшей устойчивостью к механическим деформациям. Но все чаще используются пластиковые корпуса, и среди них элементы в малогабаритных корпусах наиболее подвержены механическим повреждениям. Например, источник в корпусе SO-8 будет лучше, чем тот же источник в корпусе SC70.
Параметр регулирования нагрузки
Это мера изменения напряжения VREF в зависимости от тока нагрузки, выраженная в процентах или в единицах ppm на миллиампер (ppm/mA). Этот параметр рассчитывается путем деления относительного изменения VREF при минимальном и максимальном токе нагрузки на диапазон тока нагрузки. Регулирование нагрузки зависит как от конструкции самого источника опорного напряжения, так и от паразитных сопротивлений между источником и нагрузкой. Поэтому ИОН должен быть установлен как можно ближе к нагрузке.
Во многих преобразователях сопротивление входа опорного напряжения настолько велико, что ошибка, вносимая параметром регулирования нагрузки, может быть незначительной. Информацию о максимальном токе нагрузки можно найти в даташитах АЦП/ЦАП, обозначаемых как минимальное сопротивление эталонного напряжения (RREF) или максимальный ток нагрузки (IREF). В решениях, в которых выход VREF буферизуется с помощью быстродействующего операционного усилителя, ошибка регулирования нагрузки обычно может игнорироваться. Двойное значение параметра регулирования нагрузки для шунтирующих источников определяет изменение VREF в зависимости от обратного тока нагрузки. Оно рассчитывается по той же формуле, что и раньше, при этом ток, текущий к источнику, заменяется текущим током (ISHUNT). Ток ISHUNT зависит от тока нагрузки и входного напряжения.
Параметр регулирования линии
Это мера изменения опорного напряжения в зависимости от входного напряжения. Этот параметр указывается только для последовательных источников опорного напряжения. Его значение зависит от допуска входного напряжения. Если оно находится в пределах 10% или меньше, то может не вносить значительного вклада в общую ошибку.
Также используется PSRR (Коэффициент ослабления источника питания), который описывает насколько изменение напряжения VREF зависит от изменения напряжения питания. Этот параметр может быть очень важен в устройствах где входное напряжение источника VREF получается от импульсных преобразователей. Аналогичным параметром для шунтирующих источников является обратное динамическое сопротивление, определяющее зависимость опорного напряжения от переменного тока. Шум питания шунтирующих источников VREF преобразуется RBIAS в шумовой ток.
Особые возможности
Для схем где энергопотребление критично, хорошим выбором являются последовательные источники VREF. Ток покоя большинства последовательных ИОН составляет от 25 до 200 мкА, но можно найти и с током покоя менее 1 мкА. К сожалению, низкий ток покоя достигается за счет точности и повышенного уровня шума. Некоторые источники серии VREF имеют входы Enable/Shutdown, которые снижают ток покоя до наноампер, когда опорное напряжение не требуется. Режим энергосбережения невозможен с шунтирующими источниками опорного напряжения. В свою очередь преимуществом последовательных источников является небольшая разница между входным и выходным напряжением – 200 мВ. Эти источники можно использовать при более низких входных напряжениях без каких-либо последствий. Использование шунтирующих источников в схемах с малым входным напряжением возможно, но связано с изменением тока смещения, происходящим при изменении входного напряжения, из-за того что сопротивление RBIAS должно быть низким.
Источники опорного напряжения не требуют большого количества внешних пассивных элементов, а правильный выбор тех из них, которые необходимы, может улучшить параметры VREF. Шунтирующий конденсатор на выходе VREF значительно улучшает PSRR (обратное динамическое сопротивление) на более высоких частотах. Его использование также улучшает переходную характеристику нагрузки и снижает высокочастотный шум. Наибольшие преимущества достигаются при максимально возможной мощности, и они зависят от стабильности источника VREF. В случае конденсаторов емкостью более 1 мкФ следует учитывать необходимость параллельного подключения конденсатора меньшей емкости и с низким ESR. Обратное динамическое сопротивление шунтирующего источника изменяется обратно пропорционально величине шунтирующего тока.

Некоторые последовательные ИОН имеют вывод Trim/Noise Reduction (NR), используемый для дальнейшего улучшения характеристик. Например, подключив резисторы к REF50xx, как показано на рисунке, вывод Trim/NR можно использовать для регулировки выходного напряжения в пределах ± 15 мВ. Этот выход также можно использовать для реализации фильтра нижних частот, чтобы уменьшить общий шум, присутствующий на выходе VOUT. Такой фильтр состоит из одного конденсатора. Но необходимо помнить что увеличение емкости С1 увеличит время запуска.

Цепи опорного напряжения обычно используются во многих устройствах, особенно с АЦП или ЦАП. Из-за большого интереса пользователей к этим элементам многие компании выпускают собственные варианты чипов с очень похожими или даже идентичными параметрами. Например оригинальная микросхема LM4040 имеет значение широкополосного шума 35 мкВ при выходном напряжении 2,5 В. Тот же чип с тем же обозначением, но от другого производителя, имеет широкополосный шум 350 мкВ, то есть в 10 раз выше, несмотря на то что начальная точность и температурный коэффициент одинаковы.
Выбор источника опорного напряжения начинается с поиска элементов, удовлетворяющих условиям проекта. В частности, это VREF, VIN, диапазон тока, потребляемая мощность и размер корпуса. Источник VREF также должен учитывать требования, предъявляемые к разрешающей способности преобразователя. Наиболее удобной точкой отсчета является значение младшего значащего бита (LSB). Мнемонический метод быстрого вычисления LSB в ppm состоит в том, чтобы разделить миллион на 2 в степени N, где N — количество битов в преобразователе.
АЦП и ЦАП имеют свои собственные источники ошибок, такие как интегральная нелинейность (INL), дифференциальная нелинейность (DNL) и ошибки усиления и смещения. Рассматривая случай популярного однополярного преобразователя напряжения можно предположить, что погрешность опорного напряжения функционально эквивалентна погрешности коэффициента усиления. Параметры INL и DNL не зависят от опорного напряжения. Ошибки усиления и смещения можно понять, если предположить, что однополярные АЦП и ЦАП имеют два опорных напряжения, VREF и GND, а для биполярных преобразователей это: VREF и -VREF. Ошибка смещения представляет собой отклонение на выходе (в битах для АЦП и в напряжении для ЦАП) от идеального нижнего опорного значения – MFS (GND или -VREF) при форсировании сигналом, соответствующим MFS.
Ошибка усиления представляет собой отклонение от идеального положительного выходного значения полной шкалы (PFS) при полной силе за вычетом ошибки смещения. Опорное напряжение PFS равно VREF, поэтому любой сдвиг опорного напряжения эквивалентен ошибке усиления. На PFS влияют такие ошибки как начальная точность, температурный коэффициент и долгосрочный дрейф. Они связаны с VREF, поэтому ошибка опорного напряжения может привести к потере динамического диапазона входных сигналов вблизи PFS, что отразится на точности обработки.

Погрешность опорного напряжения для входного сигнала, близкого к половине диапазона, вдвое меньше, чем для входного сигнала размера PFS, и незначительна для сигналов вблизи MFS. Например, эталонная ошибка в 8 LSB в худшем случае приведет к потере 3 битов точности для сигнала PFS, 2 битов для середины диапазона и без потери точности для MFS. Следовательно в схеме с приоритетом динамического диапазона важно использовать максимально допустимое опорное напряжение, чтобы свести к минимуму потерю точности для сигналов конца диапазона.
