Определи́тель (детермина́нт) в линейной алгебре — скалярная величина, которая характеризует ориентированное «растяжение» или «сжатие» многомерного евклидова пространства после преобразования матрицей; имеет смысл только для квадратных матриц. Стандартные обозначения определителя матрицы  —
—  ,
,  ,
,  [1].
[1].
Определитель квадратной матрицы размеров  , заданной над коммутативным кольцом
, заданной над коммутативным кольцом  , является элементом кольца . Эта величина определяет многие свойства матрицы , в частности, матрица обратима тогда и только тогда, когда её определитель является обратимым элементом кольца . В случае, когда — поле, определитель матрицы равен нулю тогда и только тогда, когда ранг матрицы меньше
, является элементом кольца . Эта величина определяет многие свойства матрицы , в частности, матрица обратима тогда и только тогда, когда её определитель является обратимым элементом кольца . В случае, когда — поле, определитель матрицы равен нулю тогда и только тогда, когда ранг матрицы меньше  , то есть когда системы строк и столбцов матрицы являются линейно зависимыми.
, то есть когда системы строк и столбцов матрицы являются линейно зависимыми.
История[править | править код]
Теория определителей возникла в связи с задачей решения систем линейных уравнений.
К понятию определителя близко подошли авторы древнекитайского учебника «Математика в девяти книгах»[2].
В Европе определители матриц 2 × 2 встречаются у Кардано в XVI веке.
Для старших размерностей определение детерминанта дано Лейбницем в 1693 году.
Первая публикация принадлежит Крамеру. Теория определителей создана Вандермондом, Лапласом, Коши и Якоби. Термин «определитель» в современном его значении ввёл О. Коши (1815), хотя ранее (1801) «детерминантом» К. Гаусс назвал дискриминант квадратичной формы.
Японский математик Сэки Такакадзу ввёл определители независимо в 1683 году[3].
Определения[править | править код]
Через перестановки[править | править код]
Для квадратной матрицы  размера её определитель
размера её определитель  вычисляется по формуле:
вычисляется по формуле:
 ,
,

где суммирование проводится по всем перестановкам  чисел
чисел  , а
, а  обозначает число инверсий в перестановке .
обозначает число инверсий в перестановке .
Таким образом, в определитель входит  слагаемых, которые также называют «членами определителя».
слагаемых, которые также называют «членами определителя».
Эквивалентная формула:
- ,

где коэффициент  — символ Леви-Чивиты — равен:
— символ Леви-Чивиты — равен:
- 0, если не все индексы различны,
- 1, если все индексы различны и подстановка чётна,
- −1, если все индексы различны и подстановка нечётна.


Аксиоматическое построение (определение на основе свойств)[править | править код]
Понятие определителя может быть введено на основе его свойств. А именно, определителем вещественной матрицы называется функция  , обладающая следующими тремя свойствами[4]:
, обладающая следующими тремя свойствами[4]:
- — кососимметрическая функция строк (столбцов) матрицы .
- — полилинейная функция строк (столбцов) матрицы .
- , где — единичная -матрица.


Значение определителя матрицы[править | править код]
Для матрицы первого порядка значение детерминанта равно единственному элементу этой матрицы:

Матрицы 2 x 2[править | править код]

Схема расчета определителя матрицы 2×2.

Площадь параллелограмма равна модулю определителя матрицы, образованной векторами — сторонами параллелограмма.
Для матрицы  определитель вычисляется как:
определитель вычисляется как:

Эта матрица A может быть рассмотрена как матрица линейного отображения, преобразующего единичный квадрат в параллелограмм с вершинами (0, 0), (a, b), (a + c, b + d), и (c, d).
Абсолютное значение определителя  равно площади этого параллелограмма, и, таким образом, отражает коэффициент, на который масштабируются площади при преобразовании A.
равно площади этого параллелограмма, и, таким образом, отражает коэффициент, на который масштабируются площади при преобразовании A.
Значение определителя со знаком (ориентированная площадь параллелограмма) помимо коэффициента масштабирования также показывает, выполняет ли преобразование A отражение.
Матрицы 3 x 3[править | править код]
Определитель матрицы  можно вычислить по формуле:
можно вычислить по формуле:


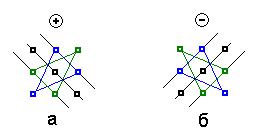
Для более удобного вычисления определителя третьего порядка можно воспользоваться правилом Саррюса или правилом треугольника.
Определитель матрицы, составленной из векторов  равен их смешанному произведению в правой декартовой системе координат и, аналогично двумерному случаю, представляет собой ориентированный объём параллелепипеда, натянутого на . Геометрически определитель матрицы 3х3 означает объем параллелепипеда, построенного на векторах матрицы. [5]
равен их смешанному произведению в правой декартовой системе координат и, аналогично двумерному случаю, представляет собой ориентированный объём параллелепипеда, натянутого на . Геометрически определитель матрицы 3х3 означает объем параллелепипеда, построенного на векторах матрицы. [5]
Матрицы N × N[править | править код]
В общем случае, для матриц более высоких порядков (выше 2-го порядка) определитель можно вычислить, применив следующую рекурсивную формулу:
-
- , где — дополнительный минор к элементу . Эта формула называется разложением по строке.



Легко доказать, что при транспонировании определитель матрицы не изменяется (иными словами, аналогичное разложение по первому столбцу также справедливо, то есть даёт такой же результат, как и разложение по первой строке):

Также справедливо и аналогичное разложение по любой строке (столбцу):

Обобщением вышеуказанных формул является разложение детерминанта по Лапласу (Теорема Лапласа), дающее возможность вычислять определитель по любым  строкам (столбцам):
строкам (столбцам):

Альтернативные методы вычисления[править | править код]
- Метод конденсации Доджсона, основанный на рекурсивной формуле:
- .

Основные свойства определителей[править | править код]
Следующие свойства отражают основные результаты теории определителей, применение которых выходит далеко за пределы этой теории:
- (Определитель единичной матрицы равен 1);
- (Определитель является однородной функцией степени на пространстве матриц размера );
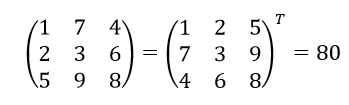
- (Определитель матрицы не меняется при её транспонировании);
- (Определитель произведения матриц равен произведению их определителей, и — квадратные матрицы одного и того же порядка);
- , причём матрица обратима тогда и только тогда, когда обратим её определитель ;
- Существует ненулевое решение уравнения тогда и только тогда, когда (или же должен быть нетривиальным делителем нуля в случае, если — не целостное кольцо).






Определитель как функция строк (столбцов) матрицы[править | править код]
При изучении теории определителей полезно иметь в виду, что в основе этой теории лежит техника манипулирования со строками и столбцами матриц, разработанная К.Ф. Гауссом (преобразования Гаусса). Суть этих преобразований сводится к линейным операциям над строками (столбцами) и их перестановке. Эти преобразования достаточно простым образом отражаются на определителе, и при их изучении удобно “расчленить” исходную матрицу на строки (или столбцы) и считать определитель функцией, определённой над наборами строк (столбцов). Далее буквами  обозначаются строки (столбцы) матрицы .
обозначаются строки (столбцы) матрицы .
- 1. Определитель — полилинейная функция строк (столбцов) матрицы. Полилинейность означает линейность функции по каждому аргументу при фиксированных значениях остальных аргументов:
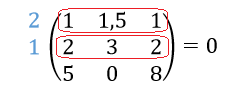
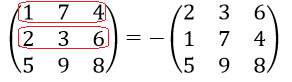
- 2. Определитель — кососимметрическая функция строк (столбцов) матрицы, то есть при перестановке двух строк (столбцов) матрицы её определитель умножается на −1:
- 3. Если две строки (столбца) матрицы совпадают, то её определитель равен нулю:



Замечание. Свойства 1-3 являются основными свойствами определителя как функции строк (столбцов), они легко доказываются непосредственно из определения. Свойство 2 (кососимметричность) является логическим следствием свойств 1 и 3. Свойство 3 является логическим следствием свойства 2, если в кольце элемент 2 (т.е. 1 + 1) не совпадает с нулём и не является делителем нуля. Из свойств 1 и 3 вытекают также следующие свойства:
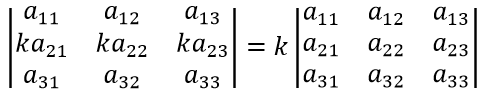
- 4. Общий множитель элементов какой-либо строки (столбца) определителя можно вынести за знак определителя (следствие свойства 1).
- 5. Если хотя бы одна строка (столбец) матрицы нулевая, то определитель равен нулю (следствие свойства 4).
- 6. Если две (или несколько) строки (столбца) матрицы линейно зависимы, то её определитель равен нулю (следствие свойств 1 и 3).
- 7. При добавлении к любой строке (столбцу) линейной комбинации других строк (столбцов) определитель не изменится (следствие свойств 1 и 6).
Фактом, имеющим фундаментальное значение, является универсальность определителя как полилинейной кососимметрической функции полного ранга, аргументами которой являются элементы конечномерного векторного пространства  (или -модуля с конечным базисом). Справедлива следующая
(или -модуля с конечным базисом). Справедлива следующая
- Теорема. Пусть — свободный -модуль ранга (-мерное векторное пространство над , если — поле). Пусть — -значная функция на , обладающая свойствами 1-3. Тогда при выборе базиса пространства существует константа такая, что при всех значениях справедливо равенство:
- ,





где  — столбец координат вектора
— столбец координат вектора  относительно базиса
относительно базиса  .
.
Одним из важнейших следствий универсальности определителя является следующая теорема о мультипликативности определителя.
- Теорема. Пусть — матрица размера . Тогда для любой матрицы размера .

Доказательство
Рассмотрим на пространстве столбцов  кососимметрическую полилинейную форму
кососимметрическую полилинейную форму  . Согласно доказанной теореме, эта форма равна
. Согласно доказанной теореме, эта форма равна  , где
, где  .
.
■
Определитель и ориентированный объём[править | править код]
Пусть  — три вектора в пространстве
— три вектора в пространстве  . Они порождают параллелепипед, вершины которого лежат в точках с радиус-векторами
. Они порождают параллелепипед, вершины которого лежат в точках с радиус-векторами  . Этот параллелепипед может быть вырожден, если вектора компланарны (лежат в одной плоскости, линейно зависимы).
. Этот параллелепипед может быть вырожден, если вектора компланарны (лежат в одной плоскости, линейно зависимы).
Функция ориентированного объёма  определяется как объём параллелепипеда, порождённого этими векторами, и взятый со знаком “+”, если тройка векторов
определяется как объём параллелепипеда, порождённого этими векторами, и взятый со знаком “+”, если тройка векторов  положительно ориентирована, и со знаком “-“, если она ориентирована отрицательно.
положительно ориентирована, и со знаком “-“, если она ориентирована отрицательно.
Функция полилинейна и кососимметрична. Свойство 3, очевидно, выполнено. Для доказательства полилинейности этой функции, достаточно доказать её линейность по вектору  . Если вектора
. Если вектора  линейно зависимы, значение будет нулевым независимо от вектора , и значит, линейно зависящим от него. Если вектора линейно независимы, обозначим через
линейно зависимы, значение будет нулевым независимо от вектора , и значит, линейно зависящим от него. Если вектора линейно независимы, обозначим через  вектор единичной нормали к плоскости векторов , такой, что
вектор единичной нормали к плоскости векторов , такой, что  . Тогда ориентированный объём параллелепипеда равен произведению площади основания, построенного на векторах и независящего от вектора , и алгебраической величины проекции вектора на нормаль к основанию, которая равна скалярному произведению
. Тогда ориентированный объём параллелепипеда равен произведению площади основания, построенного на векторах и независящего от вектора , и алгебраической величины проекции вектора на нормаль к основанию, которая равна скалярному произведению  и является величиной, линейно зависящей от вектора . Линейность по доказана, и аналогично доказывается линейность по остальным аргументам.
и является величиной, линейно зависящей от вектора . Линейность по доказана, и аналогично доказывается линейность по остальным аргументам.
Применяя теорему об универсальности определителя как кососимметрической полилинейной функции, получаем, что при выборе ортонормированного базиса  пространства
пространства
- ,

где  — координаты векторов в выбранном базисе.
— координаты векторов в выбранном базисе.
Таким образом, определитель матрицы коэффициентов векторов относительно ортонормированного базиса имеет смысл ориентированного объёма параллелепипеда, построенного на этих векторах.
Всё вышесказанное без существенных изменений переносится на пространство  произвольной размерности.
произвольной размерности.
Разложение определителя по строке/столбцу и обращение матриц[править | править код]
Формулы разложения определителя по строке/столбцу позволяют сводить вычисление определителей к рекурсивной процедуре, использующей вычисление определителей меньших порядков. Для вывода этих формул сгруппируем и просуммируем в формуле для определителя матрицы  , с учётом равенства
, с учётом равенства  , все ненулевые члены, содержащие элемент
, все ненулевые члены, содержащие элемент  . Эта сумма равна:
. Эта сумма равна:
- ,

где  — матрица, получаемая из
— матрица, получаемая из  удалением строки с номером
удалением строки с номером  и столбца с номером
и столбца с номером  .
.
Так как произвольный элемент  можно
можно  перестановками соответствующего столбца вправо и
перестановками соответствующего столбца вправо и  перестановками соответствующей строки вниз переместить в правый нижний угол матрицы, причём дополнительная к нему матрица сохранит свой вид, то сумма всех членов в разложении определителя, содержащих , будет равна
перестановками соответствующей строки вниз переместить в правый нижний угол матрицы, причём дополнительная к нему матрица сохранит свой вид, то сумма всех членов в разложении определителя, содержащих , будет равна
- .

Величина  называется алгебраическим дополнением элемента матрицы .
называется алгебраическим дополнением элемента матрицы .
Учитывая, что каждый член разложения определителя с ненулевым коэффициентом содержит ровно один элемент из i-ой строки, можно разложить определитель по членам этой строки:
- — Формула разложения определителя по i-ой строке

Аналогично, учитывая, что каждый член разложения определителя с ненулевым коэффициентом содержит ровно один элемент из j-го столбца, можно разложить определитель по членам этого столбца:
- — Формула разложения определителя по j-ому столбцу

Если элементы k-й строки матрицы скопировать в i-ую строку, её определитель станет равен нулю, а по формуле разложения определителя по i-ой строке получится:
- — Формула “фальшивого” разложения определителя по i-ой строке ().


Аналогично для столбцов:
- — Формула “фальшивого” разложения определителя по j-ому столбцу ()


Полученные формулы полезно записать в матричном виде. Введём матрицу алгебраических дополнений к элементам матрицы :  .
.
Тогда, согласно с полученными формулами,
- .

Следствие 1 (Критерий обратимости матриц). Квадратная матрица является обратимой тогда и только тогда, когда  — обратимый элемент кольца , при этом
— обратимый элемент кольца , при этом  .
.
Следствие 2. Если произведение матриц равно нулю  , и матрица — квадратная, тогда
, и матрица — квадратная, тогда  .
.
Решение систем линейных алгебраических уравнений с помощью определителей[править | править код]
Формула Крамера позволяет выразить решение системы линейных алгебраических уравнений в виде отношения определителей, в знаменателе которого стоит определитель системы, а в числителе — определитель матрицы системы, в которой столбец коэффициентов при соответствующей переменной заменён на столбец из правых частей уравнений.
Формула Крамера. Пусть задана система линейных алгебраических уравнений в матричном виде:  , где — матрица коэффициентов системы размера ,
, где — матрица коэффициентов системы размера ,  — столбец из правых частей уравнений системы, и вектор
— столбец из правых частей уравнений системы, и вектор  — решение этой системы. Тогда при любых
— решение этой системы. Тогда при любых  справедливо равенство:
справедливо равенство:

Из этой формулы следует, в частности, что если — не вырожден (не является нулём или делителем нуля), система может обладать не более чем одним решением, а если определитель ещё и обратим, то система обладает единственным решением.
Одной из важнейших теорем в теории определителей является следующая теорема о решениях однородной системы линейных уравнений.
Теорема. Пусть — поле. Однородная система линейных уравнений имеет нетривиальное (ненулевое) решение тогда и только тогда, когда определитель матрицы коэффициентов равен нулю:  .
.
Доказательство
Необходимость условия содержится в следствии 2 предыдущего раздела. Докажем необходимость.
Если матрица — нулевая, любой вектор  является решением.
является решением.
Пусть  — максимальный невырожденный минор в матрице имеет размеры
— максимальный невырожденный минор в матрице имеет размеры  . Не ограничивая общности, считаем, что этот минор образован первыми r строками и столбцами (иначе перенумеруем переменные и переставим уравнения в другом порядке.)
. Не ограничивая общности, считаем, что этот минор образован первыми r строками и столбцами (иначе перенумеруем переменные и переставим уравнения в другом порядке.)
Введём вектора  и
и  . Тогда первые r уравнений системы в матричном виде записываются так:
. Тогда первые r уравнений системы в матричном виде записываются так:
Поскольку матрица обратима, любому значению  соответствует единственный вектор
соответствует единственный вектор  , удовлетворяющий этим уравнениям. Покажем, что при этом остальные уравнения будут выполнены автоматически. Пусть
, удовлетворяющий этим уравнениям. Покажем, что при этом остальные уравнения будут выполнены автоматически. Пусть  .
.
Введём две матрицы:
- и .


У матрицы  все столбцы являются частями столбцов из матрицы , а последний столбец есть линейная комбинация столбцов матрицы с коэффициентами
все столбцы являются частями столбцов из матрицы , а последний столбец есть линейная комбинация столбцов матрицы с коэффициентами  , поэтому в силу линейности определителя по столбцам
, поэтому в силу линейности определителя по столбцам  есть линейная комбинация определителей миноров матрицы размера
есть линейная комбинация определителей миноров матрицы размера  . Так как — максимальный по размеру невырожденный минор, все миноры большего размера имеют нулевой определитель, поэтому
. Так как — максимальный по размеру невырожденный минор, все миноры большего размера имеют нулевой определитель, поэтому  .
.
Из соотношения  следует, что
следует, что  , где столбец
, где столбец  . Поэтому
. Поэтому  .
.
Тогда  . И так как
. И так как  , то j-ое уравнение системы тоже выполнено. ■
, то j-ое уравнение системы тоже выполнено. ■
Данная теорема используется, в частности, для нахождения собственных значений и собственных векторов матриц.
Критерий полноты и линейной независимости системы векторов[править | править код]
Тесно связанными с понятием определителя является понятие линейной зависимости и полноты систем векторов в векторном пространстве.
Пусть — поле, — векторное пространство над с конечным базисом  . Пусть задан ещё набор из векторов
. Пусть задан ещё набор из векторов  . Их координатами
. Их координатами  относительно заданного базиса являются коэффициенты разложения
относительно заданного базиса являются коэффициенты разложения  . Составим (квадратную) матрицу
. Составим (квадратную) матрицу  . Справедлива теорема:
. Справедлива теорема:
Теорема (Критерий полноты и линейной независимости системы векторов).
- (1) Система векторов линейно зависима тогда и только тогда, когда .
- (2) Система векторов полна, тогда и только тогда, когда матрица не вырождена ().

Доказательство
(1) Доказательство основано на том, что вектор  имеет столбец координат, равный
имеет столбец координат, равный  , где .
, где .
Если  , то
, то  . Тогда
. Тогда  и если отличен от нуля, то
и если отличен от нуля, то  .
.
Обратно, если , существует ненулевой столбец , такой что . Это означает, что .
(2) Если матрица не вырождена, она обратима. Пусть  — произвольный вектор,
— произвольный вектор,  — столбец его координат,
— столбец его координат,  . Тогда
. Тогда  . Таким образом, произвольный вектор разложим по системы векторов , что означает её полноту.
. Таким образом, произвольный вектор разложим по системы векторов , что означает её полноту.
Обратно, пусть матрица вырождена. Тогда существует ненулевая строка коэффициентов  , такая, что
, такая, что  . Это значит, что любой вектор , разложимый по системе векторов , удовлетворяет ограничению
. Это значит, что любой вектор , разложимый по системе векторов , удовлетворяет ограничению  . Если какой-то коэффициент
. Если какой-то коэффициент  отличен от нуля, то базисный вектор
отличен от нуля, то базисный вектор  не разложим по этой системе векторов, и значит, она не полна.
не разложим по этой системе векторов, и значит, она не полна.
■
Следствие. В векторном пространстве , обладающем конечным базисом из векторов:
- (1) всякая система, состоящая менее, чем из векторов, не полна;
- (2) всякая система, состоящая более, чем из векторов, линейно зависима;
- (3) всякий базис пространства содержит ровно векторов.
Таким образом, размерность векторного пространства с конечным базисом корректно определена.
Некоторые специальные свойства определителей[править | править код]
- Определитель матрицы равен произведению её собственных значений.
- Если квадратная матрица выражает линейное преобразование, то её определитель не меняется при замене базиса линейного пространства.
Алгоритмическая реализация[править | править код]
- Прямые методы вычисления определителя могут быть основаны непосредственно на его определении, как суммы по перестановкам, или на разложении Лапласа по определителям меньшего порядка. Однако такие методы очень неэффективны, так как требуют О(n!) операций для вычисления определителя -го порядка. В то же время они универсальны, применимы в тех случаях, когда элементы матрицы не являются числами (функции, многочлены, дифференциальные формы чётной степени и т. д.), и не требуют выполнения операций деления.
- Можно вычислить определитель и выполнив меньшее количество операций умножения; точнее, можно для матрицы обойтись лишь количеством слагаемых, равным количеству разбиений числа вместо , например 5 вместо 6 для [6]:
- .
- Один из наиболее быстрых численных методов вычисления определителя заключается в простой модификации метода Гаусса. Следуя методу Гаусса, произвольную матрицу можно привести к ступенчатому виду (Верхнетреугольная матрица), используя лишь две следующие операции над матрицей — перестановку двух строк и добавление к одной из строк матрицы другой строки, умноженной на произвольное число. Из свойств определителя следует, что вторая операция не изменяет определителя матрицы, а первая лишь меняет его знак на противоположный. Определитель матрицы, приведённой к ступенчатому виду, равен произведению элементов на её диагонали, так как она является треугольной, поэтому определитель исходной матрицы равен:


- где — число перестановок строк, выполненных алгоритмом, а — ступенчатая форма матрицы , полученная в результате работы алгоритма. Сложность этого метода, как и метода Гаусса, составляет , для его реализации необходимо использование операции деления.



- Определитель можно вычислить, зная LU-разложение матрицы. Если , где и — треугольные матрицы, то . Определитель треугольной матрицы равен просто произведению её диагональных элементов.
- Если доступен алгоритм, выполняющий умножение двух матриц порядка за время , где , для некоторого , то определитель матрицы порядка может быть вычислен за время .[7] В частности это означает, что, используя для умножения матриц алгоритм Копперсмита — Винограда, определитель можно вычислить за время .









Специальные виды определителей[править | править код]
- Определитель Вронского (Вронскиан)
- Определитель Вандермонда
- Определитель Грама
- Определитель Якоби (Якобиан)
См. также[править | править код]
- Циркулянт
- Перманент
- Пфаффиан
- Результант
Примечания[править | править код]
- ↑ Бронштейн И. Н., Семендяев К. А. Справочник по математике для инженеров и учащихся втузов. — 13-е изд., исправленное. — М.: Наука, 1986.
- ↑ Э. И. Березкина. Математика древнего Китая. — М.: Наука, 1980.
- ↑ H. W. Eves. An Introduction to the History of Mathematics. — Saunders College Publishing, 1990.
- ↑ Скорняков Л. А. Элементы алгебры. — М.: Наука, 1986. — С. 16-23. — Тираж 21 000 экз.
- ↑ Определитель матрицы и геометрический смысл определителя матрицы (рус.). Математика для всех.
- ↑ Houston, Robin; Goucher, Adam P. & Johnston, Nathaniel (2023), A New Formula for the Determinant and Bounds on Its Tensor and Waring Ranks, arΧiv:2301.06586 [math.CO].
- ↑ J. R. Bunch and J.E. Hopcroft. Triangular factorization and inversion by fast matrix multiplication, Mathematics of Computation, 28 (1974) 231—236.
Литература[править | править код]
- В. А. Ильин, Э. Г. Позняк Линейная алгебра, М.: Наука — Физматлит, 1999.
- Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры. М.: Физматлит, 2000.
- Кострикин А. И. Введение в алгебру. Часть 1. Основы алгебры: Учебник для вузов. М.: Физматлит, 2004.
- Боревич З. И. Определители и матрицы. – М.: Наука, 1988.
Определитель матрицы.
Навигация по странице:
- Определение определителя матрицы
- Свойства определителя матрицы
- Методы вычисления определителя матрицы
- Определитель матрицы 1×1
- Определитель матрицы 2×2
- Определитель матрицы 3×3
- Правило треугольника для вычисления определителя матрицы 3-тего порядка
- Правило Саррюса для вычисления определителя матрицы 3-тего порядка
- Определитель матрицы произвольного размера
- Разложение определителя по строке или столбцу
- Приведение определителя к треугольному виду
- Теорема Лапласа
Определитель матрицы или детерминант матрицы – это одна из основных численных характеристик квадратной матрицы, применяемая при решении многих задач.
Определение.
Определителем матрицы n×n будет число:
| det(A) = | Σ | (-1)N(α1,α2,…,αn)·aα11·aα22·…·aαnn |
| (α1,α2,…,αn) |
где (α1,α2,…,αn) – перестановка чисел от 1 до n, N(α1,α2,…,αn) – число инверсий в перестановке, суммирование идёт по всем возможным перестановкам порядка n.
Обозначение
Определитель матрици A обычно обозначается det(A), |A|, или ∆(A).
Свойства определителя матрицы
-
Определитель матрицы с двумя равными строками (столбцами) равен нулю.
-
Определитель матрицы с двумя пропорциональными строками (столбцами) равен нулю.
-
Определитель матрицы, содержащий нулевую строку (столбец), равен нулю.
-
Определитель матрицы равен нулю если две (или несколько) строк (столбцев) матрицы линейно зависимы.
-
При транспонировании значение определителя матрицы не меняется:
det(A) = det(AT)
-
Определитель обратной матрицы:
det(A-1) = det(A)-1
-
Определитель матрицы не изменится, если к какой-то его строке (столбцу) прибавить другую строку (столбец), умноженную на некоторое число.
-
Определитель матрицы не изменится, если к какой-то его строке (столбцу) прибавить линейную комбинации других строк (столбцов).
-
Если поменять местами две строки (столбца) матрицы, то определитель матрицы поменяет знак.
-
Общий множитель в строке (столбце) можно выносить за знак определителя:
a11a12…a1n
a21a22…a2n
….
k·ai1k·ai2…k·ain
….
an1an2…ann=
k·
a11a12…a1n
a21a22…a2n
….
ai1ai2…ain
….
an1an2…ann
-
Если квадратная матрица n-того порядка умножается на некоторое ненулевое число, то определитель полученной матрицы равен произведению определителя исходной матрицы на это число в n-той степени:
B = k·A => det(B) = kn·det(A)
где A матрица n×n, k – число.
-
Если каждый элемент в какой-то строке определителя равен сумме двух слагаемых, то исходный определитель равен сумме двух определителей, в которых вместо этой строки стоят первые и вторые слагаемые соответственно, а остальные строки совпадают с исходным определителем:
a11a12…a1n
a21a22…a2n
….
bi1 + ci1bi2 + ci2…bin + cin
….
an1an2…ann=
a11a12…a1n
a21a22…a2n
….
bi1bi2…bin
….
an1an2…ann+
a11a12…a1n
a21a22…a2n
….
ci1ci2…cin
….
an1an2…ann -
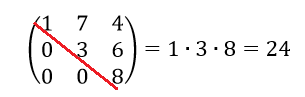
Определитель верхней (нижней) треугольной матрицы равен произведению его диагональных элементов.
-
Определитель произведения матриц равен произведению определителей этих матриц:
det(A·B) = det(A)·det(B)
Методы вычисления определителя матрицы
Вычисление определителя матрицы 1×1
Правило:
Для матрицы первого порядка значение определителя равно значению элемента этой матрицы:
∆ = |a11| = a11
Вычисление определителя матрицы 2×2
Правило:
Для матрицы 2×2 значение определителя равно разности произведений элементов главной и побочной диагоналей:
| ∆ = |
|
= a11·a22 – a12·a21 |
Пример 1.
Найти определитель матрицы A
Решение:
| det(A) = |
|
= 5·1 – 7·(-4) = 5 + 28 = 33 |
Вычисление определителя матрицы 3×3
Правило треугольника для вычисления определителя матрицы 3-тего порядка
Правило:
Для матрицы 3×3 значение определителя равно сумме произведений элементов главной диагонали и произведений элементов лежащих на треугольниках с гранью параллельной главной диагонали, от которой вычитается произведение элементов побочной диагонали и произведение элементов лежащих на треугольниках с гранью параллельной побочной диагонали.
| ∆ = |
|
= |
=
a11·a22·a33 +
a12·a23·a31 +
a13·a21·a32 –
a13·a22·a31 –
a11·a23·a32 –
a12·a21·a33
Правило Саррюса для вычисления определителя матрицы 3-тего порядка
Правило:
Справа от определителя дописывают первых два столбца и произведения элементов на главной диагонали и на диагоналях, ей параллельных, берут со знаком “плюс”; а произведения элементов побочной диагонали и диагоналей, ей параллельных, со знаком “минус”:
| ∆ = |
|
= |
=
a11·a22·a33 +
a12·a23·a31 +
a13·a21·a32 –
a13·a22·a31 –
a11·a23·a32 –
a12·a21·a33
Пример 2.
Найти определитель матрицы A =
571
-410
203
Решение:
det(A) =
571
-410
203
=
5·1·3 + 7·0·2 + 1·(-4)·0 –
1·1·2 – 5·0·0 – 7·(-4)·3 = 15 + 0 + 0 – 2 – 0 + 84 = 97
Вычисление определителя матрицы произвольного размера
Разложение определителя по строке или столбцу
Правило:
Определитель матрицы равен сумме произведений элементов строки определителя на их алгебраические дополнения:
| n | |||
| det(A) = | Σ | aij·Aij | – разложение по i-той строке |
| j = 1 |
Правило:
Определитель матрицы равен сумме произведений элементов столбца определителя на их алгебраические дополнения:
| n | |||
| det(A) = | Σ | aij·Aij | – разложение по j-тому столбцу |
| i = 1 |
При разложение определителя матрицы обычно выбирают ту строку/столбец, в которой/ом максимальное количество нулевых элементов.
Пример 3.
Найти определитель матрицы A
Решение: Вычислим определитель матрицы разложив его по первому столбцу:
| det(A) = |
|
= |
= 2·(-1)1+1·
21
11
+ 0·(-1)2+1·
41
11
+ 2·(-1)3+1·
41
21
=
= 2·(2·1 – 1·1) + 2·(4·1 – 2·1) = 2·(2 – 1) + 2·(4 – 2) = 2·1 + 2·2 = 2 + 4 = 6
Пример 4.
Найти определитель матрицы A
Решение: Вычислим определитель матрицы, разложив его по второй строке (в ней больше всего нулей):
det(A) =
2411
0200
2113
4023
=
– 0·
411
113
023
+ 2·
211
213
423
– 0·
241
213
403
+ 0·
241
211
402
=
= 2·(2·1·3 + 1·3·4 + 1·2·2 – 1·1·4 – 2·3·2 – 1·2·3) = 2·(6 +12 + 4 – 4 – 12 – 6) = 2·0 = 0
Приведение определителя к треугольному виду
Правило:
Используя свойства определителя для элементарных преобразований над строками и столбцами 8 – 11, определитель приводится к треугольному виду, и тогда его значение будет равно произведению элементов стоящих на главной диагонали.
Пример 5.
Найти определитель матрицы A приведением его к треугольному виду
Решение:
det(A) =
2411
0210
2113
4023
Сначала получим нули в первом столбце под главной диагональю. Для этого отнимем от 3-тей строки 1-ую строку, а от 4-той строки 1-ую строку, умноженную на 2:
det(A) =
2411
0210
2 – 21 – 41 – 13 – 1
4 – 2·20 – 4·22 – 1·23 – 1·2
=
2411
0210
0-302
0-801
Получим нули во втором столбце под главной диагональю. Для этого поменяем местами 2-ой и 3-тий столбцы (при этом детерминант сменит знак на противоположный):
det(A) = –
2141
0120
00-32
00-81
Получим нули в третьем столбце под главной диагональю. Для этого к 3-ему столбцу добавим 4-тий столбец, умноженный на 8:
det(A) = –
214 + 1·81
012 + 0·80
00-3 + 2·82
00-8 + 1·81
=
–
21121
0120
00132
0001
= -2·1·13·1 = -26
Теорема Лапласа
Теорема:
Пусть ∆ – определитель n-ого порядка. Выберем в нем произвольные k строк (столбцов), причем k < n. Тогда сумма произведений всех миноров k-ого порядка, которые содержатся в выбранных строках (столбцах), на их алгебраические дополнения равна определителю.
![]()
Свойства определителя матрицы
- Определитель единичной матрицы равен единице: det(E) = 1. Единичная матрица — это квадратная матрица, элементы главной диагонали которой равны единице, а все остальные элементы равны 0.
- Определитель матрицы с двумя равными строками или столбцами равен нулю.
- Определитель матрицы с двумя пропорциональными строками или столбцами равен нулю.
- Определитель матрицы, содержащий нулевую строку или столбец, равен нулю.
- Определитель матрицы равен нулю, если две или несколько строк или столбцов матрицы линейно зависимы.
- При транспонировании значение определителя матрицы не меняется: det(A) = det(AT).
- Определитель обратной матрицы: det(A-1) = det(A)-1.
- Определитель матрицы не изменится, если к какой-то его строке или столбцу прибавить другую строку или столбец, умноженную на некоторое число.
- Определитель матрицы не изменится, если к какой-то его строке или столбцу прибавить линейную комбинации других строк или столбцов.
- Если поменять местами две строки или два столбца матрицы, то определитель матрицы поменяет знак.
- Общий множитель в строке или столбце можно выносить за знак определителя:
- Если квадратная матрица n-того порядка умножается на некоторое ненулевое число, то определитель полученной матрицы равен произведению определителя исходной матрицы на это число в n-той степени:
B = k·A => det(B) = kn·det(A), где A матрица n×n, k – число.
- Если каждый элемент в какой-то строке определителя равен сумме двух слагаемых, то исходный определитель равен сумме двух определителей, в которых вместо этой строки стоят первые и вторые слагаемые соответственно, а остальные строки совпадают с исходным определителем:
- Определитель верхней или нижней треугольной матрицы равен произведению его диагональных элементов.
- Определитель произведения матриц равен произведению определителей этих матриц: det(A·B) = det(A)·det(B).


Другой материал по теме

tr(A) = tr(AT ) .
4. При суммировании матриц их следы также суммируются:
tr(A + B) = tr(A) + tr(B) .
5. Хотя коммутативный (переместительный) закон умножения матриц, вообще говоря, не выполняется, однако:
tr(A B) = tr(B A) .
В частности, если А – матрица строка: A = (a1 a2 L an ) , то:
n
tr(A AT ) = tr(AT A) = ∑ai2
i=1
Основные вопросы темы
1.Определитель квадратной матрицы.
2.Вычисление определителя матриц 1, 2 и 3 порядка.
3.Вычисление определителя матриц произвольного порядка.
2.1Определитель квадратной матрицы.
Вначале дадим качественное определение: определителем квадратной матрицы размера n×n называется число, вычисляемое по строго определенному правилу и характеризующее определенные свойства матрицы. Эта характеристика широко используется для решения различных задач матричного анализа.
Определитель матрицы А обозначается как А , , или detA.
Правила вычисления определителей удобно рассмотреть, начиная с матриц первого, второго и третьего порядка.
2.2. Вычисление определителя матриц 1, 2 и 3 порядка.
Определитель матрицы первого порядка.
Определитель матрицы первого порядка A = (a11 ) равен элементу
1×1
матрицы a11 :
= A = a11 .
Определитель матрицы второго порядка.
15
|
Определитель матрицы второго порядка A |
a11 |
a12 |
вычисля- |
|
|
= |
||||
|
2×2 |
a22 |
|||
|
a21 |
ется по формуле:
|
= |
A |
= |
a11 |
a12 |
= a11a22 − a12 a21 . |
||
|
a21 |
a22 |
Таким образом, для того чтобы найти определитель второго порядка нужно из произведения элементов, составляющих главную диагональ матрицы, вычесть произведение элементов, составляющих ее вторую диагональ.
|
4 |
2 |
равен: |
||
|
Например, определитель матрицы A = |
||||
|
5 |
6 |
|||
|
= |
A |
= |
4 |
2 |
= 4 6 − 2 5 = 10 . |
|||||||
|
5 |
6 |
|||||||||||
|
2.2.3 Определитель матрицы третьего порядка |
a11 |
a12 |
a13 |
|||||||||
|
Определитель матрицы третьего порядка |
a22 |
вы- |
||||||||||
|
A = a21 |
a23 |
|||||||||||
|
3×3 |
a32 |
|||||||||||
|
a31 |
a33 |
числяется по формуле:
|
a11 |
a12 |
a13 |
= a11a22 a33 + a12 a23 a31 + a13 a21a32 − a13 a22 a31 − a12 a21a33 − a11a23 a32 . |
|||||
|
= |
A |
= |
a21 |
a22 |
a23 |
|||
|
a31 |
a32 |
a33 |
Правая часть данного равенства представляет собой алгебраическую сумму шести слагаемых, половина из которых берется со знаком ‘+’ , а другая половина – со знаком ‘–’. Каждое слагаемое содержит произведение трех элементов матрицы (по одному из каждого столбца и каждой строки). Правило определения элементов, входящих в каждое слагаемое, удобно представить в геометрической форме. Такое пред-
ставление носит название правило треугольников или правило Сарру-
са (см. рис. 2.1).
Рисунок 2.1. Графическая иллюстрация правила Сарруса.
16
Левая часть рисунка (рис. 2.1.а) отражает правило записи слагаемых со знаком ‘+’ :
–первое слагаемое представляет собой произведение членов матрицы, находящихся на главной диагонали;
–второе и третье слагаемые представляет собой произведение членов матрицы, входящих в треугольники с основаниями параллельными главной диагонали матрицы;
Аналогично находятся слагаемые со знаком ‘ – ’, с той лишь разницей, что все построения реализуются относительно дополнительной диагонали (рис. 2.1.б).
2.2.4Определитель квадратной матрицы произвольного порядка.
Правило вычисления определителя квадратной матрицы произвольного порядка определяется теоремой Лапласа. Однако, чтобы сформулировать эту теорему, необходимо познакомится еще с двумя понятиями: минор – Mij и алгебраическое дополнение – Aij элемента aij
матрицы А.
ОПРЕДЕЛЕНИЕ: Минором – Mij элемента aij матрицы А n-го порядка называется определитель матрицы (n-1)-го порядка, полученной из исходной матрицы путем вычеркивания строки и столбца, в которых находится элемент aij (т.е. i-ой строки и j-го столбца).
Например,
|
a11 |
a12 |
a13 |
a12 |
a13 |
= a12 a23 − a22 a13 . |
|||
|
M 31 = |
a21 |
a22 |
a23 |
= |
||||
|
a31 |
a32 |
a33 |
a22 |
a23 |
||||
ОПРЕДЕЛЕНИЕ: Алгебраическим дополнением – Аij элемента aij матрицы А n-го порядка называется минор этого элемента, взятый со знаком (− 1)i+ j :
Aij = (− 1)i+ j M ij .
Приведенные определения позволяют сформулировать теорему Лапласа, позволяющую вычислить определитель матрицы произвольного порядка.
17

Теорема Лапласа. Определитель квадратной матрицы равен сумме попарных произведений элементов произвольной строки (столбца) матрицы на их алгебраические дополнения:
n
A = ai1 Ai1 + ai2 Ai2 + ai3 Ai3 + K+ ain Ain = ∑ aik Aik , k =1
или
n
A = a1 j A1 j + a2 j A2 j + a3 j A3 j + K+ anj Anj = ∑akj Akj . k =1
Первое выражение определяет разложение определителя матрицы по элементам строки, второе – по элементам столбца.
ЗАМЕЧАНИЕ. Теорема Лапласа показывает, что определитель матрицы n-го порядка может быть вычислен через определители матриц более низкого – (n-1)-го порядка.
2.2.5 Свойства определителя матрицы.
Опираясь на теорему Лапласа, можно показать, что определитель матрицы обладает следующими свойствами.
1.При транспонировании матрицы, значение ее определителя не меняется:
A = AT .
2.При перестановке двух строк (столбцов) матрицы абсолютное значение определителя не меняется, а его знак меняется на противоположный.
3.Определитель матрицы, имеющей две пропорциональные строки (столбцы), равен нулю. В частности, определитель матрицы, имеющей две одинаковые строки (столбцы), равен нулю.
4.Общий множитель элементов отдельной строки (столбца) матрицы можно выносить за знак определителя. Из этого свойства,
вчастности, вытекает следующее равенство:
λА = λn A ,
где: n – порядок квадратной матрицы А; и λ – произвольное число.
5.Определитель матрицы не изменится, если к элементам одной строки (столбца) добавить элементы другой строки (столбца), предварительно умноженные на произвольное (не равное нулю) число.
6.Хотя произведение матриц не обладает законом коммутативности, однако:
18
A B = B A = А В ,
где А и В квадратные матрицы одного порядка.
7. Определитель единичной матрицы равен единице:
E = 1.
Учет указанных свойств часто значительно облегчает расчет определителя при использовании теоремы Лапласа. Действительно, согласно этой теореме значение определителя равно сумме попарных произведений элементов произвольной строки (столбца) матрицы на их алгебраические дополнения:
n
A = ai1 Ai1 + ai2 Ai2 + ai3 Ai3 + K+ ain Ain = ∑aik Aik , k =1
или:
n
A = a1 j A1 j + a2 j A2 j + a3 j A3 j + K+ anj Anj = ∑akj Akj . k =1
Отметим, что чем больше нулевых элементов содержит выбранная для расчета определителя строка (столбец), тем проще выполнить расчет, т.к. соответствующее слагаемое будет заведомо равно нулю. Поэтому, для вычислений целесообразно использовать строку (столбец), содержащую максимальное число нулевых элементов. Если таких строк (столбцов) нет, возможно выполнить ряд операций, которые согласно перечисленным ранее свойствам, не изменяют значение определителя, но увеличивают число нулевых элементов выбранной строки (столбца).
Пример. Вычислить определитель матрицы четвертого порядка
|
2 |
− 3 |
6 |
− 2 |
|||||
|
 |
= |
− 3 |
2 |
0 |
1 |
. |
||
|
3 |
− 1 |
4 |
2 |
|||||
|
− 8 |
2 |
− 3 |
3 |
Решение. Воспользуемся теоремой Лапласа, выбрав для разложения вторую строку, т.к. она содержит нулевой элемент. Попытаемся увеличить число нулевых элементов этой строки, воспользовавшись пятым свойством определителей. Прибавим ко второму столбцу – четвертый, предварительно умножив его на “-2” (согласно пятому свойству, значение определителя при этом не изменится). В результате получим:
19

|
2 |
1 |
6 |
− 2 |
|||||
|
 |
= |
− 3 |
0 |
0 |
1 |
. |
||
|
3 |
− 5 |
4 |
2 |
|||||
|
− 8 |
− 4 |
− 3 |
3 |
Число нулевых элементов второй строки – возросло. Теперь прибавим к первому столбцу – четвертый, предварительно умножив его на 3. В результате получим:
|
− 4 |
1 |
6 |
− 2 |
|||||
|
 |
= |
0 |
0 |
0 |
1 |
. |
||
|
9 |
− 5 |
4 |
2 |
|||||
|
1 |
− 4 |
− 3 |
3 |
Теперь, вторая строка содержит только один ненулевой элемент. Воспользуемся теоремой Лапласа, используя разложение определителя по второй строке:
|
B |
= b21 A21 + b22 A22 + b23 A23 + b24 A24 |
||||||||||
|
= 0 A21 + 0 A22 + 0 A23 + 1 A24 = |
|||||||||||
|
= A |
= (− 1)2+4 M |
= M |
− 4 |
1 |
6 |
||||||
|
24 |
24 |
= |
9 |
− 5 |
4 |
= −279 |
|||||
|
24 |
|||||||||||
|
1 |
− 4 |
− 3 |
ЗАМЕЧАНИЕ. Решение многих задач матричного анализа связано с проверкой равенства нулю определителя матрицы.
ОПРЕДЕЛЕНИЕ. Матрица А называется невырожденной (неособен-
ной), если ее определитель отличен от нуля. В противном случае она называется вырожденной (особенной).
Перечисленные выше свойства определителей позволяют сформулировать необходимое и достаточное условие равенства нулю опре-
делителя: Определитель матрицы равен нулю тогда и только тогда, когда матрица содержит линейно зависимые строки (столбцы).
Пример. Вычислить определитель матрицы четвертого порядка
|
5 |
3 |
8 |
1 |
||||
|
A |
= |
7 |
2 |
3 |
8 |
. |
|
|
10 |
6 |
16 |
2 |
||||
|
12 |
21 |
7 |
4 |
20
Соседние файлы в папке М
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Уважаемые студенты!
Заказать задачи по физике, информатике, экономике, праву, химии, теормеху, сопромату и другим предметам можно здесь всего за 10 минут.
Единичная матрица
Формула
Единичная матрица – это квадратная матрица, расположенные элементы которой по главной диагонали равны единице, а оставшиеся равны нулю. Обозначается символом $ E $.
Общая формула единичной матрицы имеет вид: $$ E = begin{pmatrix} 1&0&0&text{…}&0 \ 0&1&0&text{…}&0 \ 0&0&1&text{…}&0 \ text{…}&text{…}&text{…}&text{…}&text{…} \ 0&0&0&text{…}&1 end{pmatrix} $$
Свойства
- При умножении матрицы на единичную матрицу получается та же самая матрица:
$$ A cdot E = E cdot A = A $$ - Любая квадратная матрица в нулевой степени равна единичной матрице:
$$ A^0 = E $$ - При умножении матрицы на обратную её матрицу получается единичная матрица:
$$ A cdot A^{-1} = E $$ - При умножении матрицы на транспонированную к ней матрицу получается единичная матрица:
$$ A cdot A^T = E $$ - Определитель единичной матрицы $ E $ равен единице:
$$ Delta = det E = 1 $$
Свойства единичной матрицы подразумеваются для квадратных матриц.
Примеры
| Пример |
| Составить единичную матрицу второго, третьего и четвертого порядка |
| Решение |
|
По определению единичная матрица является квадратной, главная диагональ заполнена единицами, а остальные элементы равны нулю: $$ E = begin{pmatrix} 1&0 \ 0&1 end{pmatrix}; E = begin{pmatrix} 1&0&0 \ 0&1&0 \ 0&0&1 end{pmatrix}; E = begin{pmatrix} 1&0&0&0 \ 0&1&0&0 \ 0&0&1&0 \ 0&0&0&1 end{pmatrix} $$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| Аналогичным способом составляются матрицы более высокого порядка |
