Определи́тель (детермина́нт) в линейной алгебре — скалярная величина, которая характеризует ориентированное «растяжение» или «сжатие» многомерного евклидова пространства после преобразования матрицей; имеет смысл только для квадратных матриц. Стандартные обозначения определителя матрицы 



Определитель квадратной матрицы 


История[править | править код]
Теория определителей возникла в связи с задачей решения систем линейных уравнений.
К понятию определителя близко подошли авторы древнекитайского учебника «Математика в девяти книгах»[2].
В Европе определители матриц 2 × 2 встречаются у Кардано в XVI веке.
Для старших размерностей определение детерминанта дано Лейбницем в 1693 году.
Первая публикация принадлежит Крамеру. Теория определителей создана Вандермондом, Лапласом, Коши и Якоби. Термин «определитель» в современном его значении ввёл О. Коши (1815), хотя ранее (1801) «детерминантом» К. Гаусс назвал дискриминант квадратичной формы.
Японский математик Сэки Такакадзу ввёл определители независимо в 1683 году[3].
Определения[править | править код]
Через перестановки[править | править код]
Для квадратной матрицы 

,
где суммирование проводится по всем перестановкам 


Таким образом, в определитель входит 
Эквивалентная формула:
,
где коэффициент 
- 0, если не все индексы
различны,
- 1, если все индексы
чётна,
- −1, если все индексы
Аксиоматическое построение (определение на основе свойств)[править | править код]
Понятие определителя может быть введено на основе его свойств. А именно, определителем вещественной матрицы называется функция 
, где
— единичная
Значение определителя матрицы[править | править код]
Для матрицы первого порядка значение детерминанта равно единственному элементу этой матрицы:

Матрицы 2 x 2[править | править код]

Схема расчета определителя матрицы 2×2.

Площадь параллелограмма равна модулю определителя матрицы, образованной векторами — сторонами параллелограмма.
Для матрицы 

Эта матрица A может быть рассмотрена как матрица линейного отображения, преобразующего единичный квадрат в параллелограмм с вершинами (0, 0), (a, b), (a + c, b + d), и (c, d).
Абсолютное значение определителя 
Значение определителя со знаком (ориентированная площадь параллелограмма) помимо коэффициента масштабирования также показывает, выполняет ли преобразование A отражение.
Матрицы 3 x 3[править | править код]
Определитель матрицы 


Для более удобного вычисления определителя третьего порядка можно воспользоваться правилом Саррюса или правилом треугольника.
Определитель матрицы, составленной из векторов 
Матрицы N × N[править | править код]
В общем случае, для матриц более высоких порядков (выше 2-го порядка)
-
, где
— дополнительный минор к элементу
. Эта формула называется разложением по строке.
Легко доказать, что при транспонировании определитель матрицы не изменяется (иными словами, аналогичное разложение по первому столбцу также справедливо, то есть даёт такой же результат, как и разложение по первой строке):

Также справедливо и аналогичное разложение по любой строке (столбцу):

Обобщением вышеуказанных формул является разложение детерминанта по Лапласу (Теорема Лапласа), дающее возможность вычислять определитель по любым 

Альтернативные методы вычисления[править | править код]
- Метод конденсации Доджсона, основанный на рекурсивной формуле:
.
Основные свойства определителей[править | править код]
Следующие свойства отражают основные результаты теории определителей, применение которых выходит далеко за пределы этой теории:
(Определитель единичной матрицы равен 1);
(Определитель является однородной функцией степени
(Определитель матрицы не меняется при её транспонировании);
(Определитель произведения матриц равен произведению их определителей,
— квадратные матрицы одного и того же порядка);
, причём матрица
- Существует ненулевое решение уравнения
тогда и только тогда, когда
(или же
Определитель как функция строк (столбцов) матрицы[править | править код]
При изучении теории определителей полезно иметь в виду, что в основе этой теории лежит техника манипулирования со строками и столбцами матриц, разработанная К.Ф. Гауссом (преобразования Гаусса). Суть этих преобразований сводится к линейным операциям над строками (столбцами) и их перестановке. Эти преобразования достаточно простым образом отражаются на определителе, и при их изучении удобно “расчленить” исходную матрицу на строки (или столбцы) и считать определитель функцией, определённой над наборами строк (столбцов). Далее буквами 
- 1. Определитель — полилинейная функция строк (столбцов) матрицы. Полилинейность означает линейность функции по каждому аргументу при фиксированных значениях остальных аргументов:
- 2. Определитель — кососимметрическая функция строк (столбцов) матрицы, то есть при перестановке двух строк (столбцов) матрицы её определитель умножается на −1:
- 3. Если две строки (столбца) матрицы совпадают, то её определитель равен нулю:



Замечание. Свойства 1-3 являются основными свойствами определителя как функции строк (столбцов), они легко доказываются непосредственно из определения. Свойство 2 (кососимметричность) является логическим следствием свойств 1 и 3. Свойство 3 является логическим следствием свойства 2, если в кольце
- 4. Общий множитель элементов какой-либо строки (столбца) определителя можно вынести за знак определителя (следствие свойства 1).
- 5. Если хотя бы одна строка (столбец) матрицы нулевая, то определитель равен нулю (следствие свойства 4).
- 6. Если две (или несколько) строки (столбца) матрицы линейно зависимы, то её определитель равен нулю (следствие свойств 1 и 3).
- 7. При добавлении к любой строке (столбцу) линейной комбинации других строк (столбцов) определитель не изменится (следствие свойств 1 и 6).
Фактом, имеющим фундаментальное значение, является универсальность определителя как полилинейной кососимметрической функции полного ранга, аргументами которой являются элементы конечномерного векторного пространства 
- Теорема. Пусть
—
, обладающая свойствами 1-3. Тогда при выборе базиса
пространства
такая, что при всех значениях
справедливо равенство:
,
где 

Одним из важнейших следствий универсальности определителя является следующая теорема о мультипликативности определителя.
- Теорема. Пусть
для любой матрицы
размера
Доказательство
Рассмотрим на пространстве столбцов 



■
Определитель и ориентированный объём[править | править код]
Пусть 


Функция ориентированного объёма 

Функция 




Применяя теорему об универсальности определителя как кососимметрической полилинейной функции, получаем, что при выборе ортонормированного базиса 
,
где 
Таким образом, определитель матрицы коэффициентов векторов относительно ортонормированного базиса имеет смысл ориентированного объёма параллелепипеда, построенного на этих векторах.
Всё вышесказанное без существенных изменений переносится на пространство 
Разложение определителя по строке/столбцу и обращение матриц[править | править код]
Формулы разложения определителя по строке/столбцу позволяют сводить вычисление определителей к рекурсивной процедуре, использующей вычисление определителей меньших порядков. Для вывода этих формул сгруппируем и просуммируем в формуле для определителя матрицы 


,
где 



Так как произвольный элемент 


.
Величина 
Учитывая, что каждый член разложения определителя с ненулевым коэффициентом содержит ровно один элемент из i-ой строки, можно разложить определитель по членам этой строки:
— Формула разложения определителя по i-ой строке
Аналогично, учитывая, что каждый член разложения определителя с ненулевым коэффициентом содержит ровно один элемент из j-го столбца, можно разложить определитель по членам этого столбца:
— Формула разложения определителя по j-ому столбцу
Если элементы k-й строки матрицы
— Формула “фальшивого” разложения определителя по i-ой строке (
).
Аналогично для столбцов:
— Формула “фальшивого” разложения определителя по j-ому столбцу (
)
Полученные формулы полезно записать в матричном виде. Введём матрицу алгебраических дополнений к элементам матрицы 
Тогда, согласно с полученными формулами,
.
Следствие 1 (Критерий обратимости матриц). Квадратная матрица 

Следствие 2. Если произведение матриц равно нулю 

Решение систем линейных алгебраических уравнений с помощью определителей[править | править код]
Формула Крамера позволяет выразить решение системы линейных алгебраических уравнений в виде отношения определителей, в знаменателе которого стоит определитель системы, а в числителе — определитель матрицы системы, в которой столбец коэффициентов при соответствующей переменной заменён на столбец из правых частей уравнений.
Формула Крамера. Пусть задана система линейных алгебраических уравнений в матричном виде: 




Из этой формулы следует, в частности, что если
Одной из важнейших теорем в теории определителей является следующая теорема о решениях однородной системы линейных уравнений.
Теорема. Пусть 
Доказательство
Необходимость условия содержится в следствии 2 предыдущего раздела. Докажем необходимость.
Если матрица
Пусть 

Введём вектора 

Поскольку матрица 


Введём две матрицы:
и
.
У матрицы 




Из соотношения 



Тогда 

Данная теорема используется, в частности, для нахождения собственных значений и собственных векторов матриц.
Критерий полноты и линейной независимости системы векторов[править | править код]
Тесно связанными с понятием определителя является понятие линейной зависимости и полноты систем векторов в векторном пространстве.
Пусть 




Теорема (Критерий полноты и линейной независимости системы векторов).
- (1) Система векторов
- (2) Система векторов
).
Доказательство
(1) Доказательство основано на том, что вектор 

Если 

Обратно, если
(2) Если матрица 



Обратно, пусть матрица 




■
Следствие. В векторном пространстве
- (1) всякая система, состоящая менее, чем из
- (2) всякая система, состоящая более, чем из
- (3) всякий базис пространства
Таким образом, размерность векторного пространства
Некоторые специальные свойства определителей[править | править код]
- Определитель матрицы равен произведению её собственных значений.
- Если квадратная матрица выражает линейное преобразование, то её определитель не меняется при замене базиса линейного пространства.
Алгоритмическая реализация[править | править код]
- Прямые методы вычисления определителя могут быть основаны непосредственно на его определении, как суммы по перестановкам, или на разложении Лапласа по определителям меньшего порядка. Однако такие методы очень неэффективны, так как требуют О(n!) операций для вычисления определителя
- Можно вычислить определитель и выполнив меньшее количество операций умножения; точнее, можно для матрицы
.
- Один из наиболее быстрых численных методов вычисления определителя заключается в простой модификации метода Гаусса. Следуя методу Гаусса, произвольную матрицу

- где
— число перестановок строк, выполненных алгоритмом, а
— ступенчатая форма матрицы
, для его реализации необходимо использование операции деления.
- Определитель можно вычислить, зная LU-разложение матрицы. Если
, где
и
— треугольные матрицы, то
. Определитель треугольной матрицы равен просто произведению её диагональных элементов.
- Если доступен алгоритм, выполняющий умножение двух матриц порядка
, где
, для некоторого
, то определитель матрицы порядка
.[7] В частности это означает, что, используя для умножения матриц алгоритм Копперсмита — Винограда, определитель можно вычислить за время
.
Специальные виды определителей[править | править код]
- Определитель Вронского (Вронскиан)
- Определитель Вандермонда
- Определитель Грама
- Определитель Якоби (Якобиан)
См. также[править | править код]
- Циркулянт
- Перманент
- Пфаффиан
- Результант
Примечания[править | править код]
- ↑ Бронштейн И. Н., Семендяев К. А. Справочник по математике для инженеров и учащихся втузов. — 13-е изд., исправленное. — М.: Наука, 1986.
- ↑ Э. И. Березкина. Математика древнего Китая. — М.: Наука, 1980.
- ↑ H. W. Eves. An Introduction to the History of Mathematics. — Saunders College Publishing, 1990.
- ↑ Скорняков Л. А. Элементы алгебры. — М.: Наука, 1986. — С. 16-23. — Тираж 21 000 экз.
- ↑ Определитель матрицы и геометрический смысл определителя матрицы (рус.). Математика для всех.
- ↑ Houston, Robin; Goucher, Adam P. & Johnston, Nathaniel (2023), A New Formula for the Determinant and Bounds on Its Tensor and Waring Ranks, arΧiv:2301.06586 [math.CO].
- ↑ J. R. Bunch and J.E. Hopcroft. Triangular factorization and inversion by fast matrix multiplication, Mathematics of Computation, 28 (1974) 231—236.
Литература[править | править код]
- В. А. Ильин, Э. Г. Позняк Линейная алгебра, М.: Наука — Физматлит, 1999.
- Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры. М.: Физматлит, 2000.
- Кострикин А. И. Введение в алгебру. Часть 1. Основы алгебры: Учебник для вузов. М.: Физматлит, 2004.
- Боревич З. И. Определители и матрицы. – М.: Наука, 1988.
Содержание:
- Вычисления определителей второго порядка
- Методы вычисления определителей третьего порядка
- Приведение определителя к треугольному виду
- Правило треугольника
- Правило Саррюса
- Разложение определителя по строке или столбцу
- Разложение определителя по элементам строки или столбца
- Теорема Лапласа
В общем случае правило вычисления определителей
$n$-го порядка
является довольно громоздким. Для определителей второго и третьего порядка существуют рациональные способы их вычислений.
Вычисления определителей второго порядка
Чтобы вычислить определитель матрицы  второго порядка, надо от произведения
второго порядка, надо от произведения
элементов главной диагонали отнять произведение
элементов побочной диагонали:
$$left| begin{array}{ll}{a_{11}} & {a_{12}} \ {a_{21}} & {a_{22}}end{array}right|=a_{11} cdot a_{22}-a_{12} cdot a_{21}$$
Пример
Задание. Вычислить определитель второго порядка
$left| begin{array}{rr}{11} & {-2} \ {7} & {5}end{array}right|$
Решение. $left| begin{array}{rr}{11} & {-2} \ {7} & {5}end{array}right|=11 cdot 5-(-2) cdot 7=55+14=69$
Ответ. $left| begin{array}{rr}{11} & {-2} \ {7} & {5}end{array}right|=69$
Методы вычисления определителей третьего порядка
Для вычисления определителей третьего порядка существует такие правила.
Правило треугольника
Схематически это правило можно изобразить следующим образом:
Произведение элементов в первом определителе, которые соединены прямыми,
берется со знаком “плюс”; аналогично, для второго определителя – соответствующие произведения берутся со знаком “минус”, т.е.
$$left| begin{array}{ccc}{a_{11}} & {a_{12}} & {a_{13}} \ {a_{21}} & {a_{22}} & {a_{23}} \ {a_{31}} & {a_{32}} & {a_{33}}end{array}right|=a_{11} a_{22} a_{33}+a_{12} a_{23} a_{31}+a_{13} a_{21} a_{32}-$$
$$-a_{11} a_{23} a_{32}-a_{12} a_{21} a_{33}-a_{13} a_{22} a_{31}$$

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. Вычислить определитель $left| begin{array}{rrr}{3} & {3} & {-1} \ {4} & {1} & {3} \ {1} & {-2} & {-2}end{array}right|$ методом треугольников.
Решение. $left| begin{array}{rrr}{3} & {3} & {-1} \ {4} & {1} & {3} \ {1} & {-2} & {-2}end{array}right|=3 cdot 1 cdot(-2)+4 cdot(-2) cdot(-1)+$
$$+3 cdot 3 cdot 1-(-1) cdot 1 cdot 1-3 cdot(-2) cdot 3-4 cdot 3 cdot(-2)=54$$
Ответ. $left| begin{array}{rrr}{3} & {3} & {-1} \ {4} & {1} & {3} \ {1} & {-2} & {-2}end{array}right|=54$
Правило Саррюса
Справа от определителя дописывают первых два столбца и произведения элементов на главной диагонали и на диагоналях, ей
параллельных, берут со знаком “плюс”; а произведения элементов побочной диагонали и диагоналей, ей параллельных,
со знаком “минус”:

$$-a_{13} a_{22} a_{31}-a_{11} a_{23} a_{32}-a_{12} a_{21} a_{33}$$
Пример
Задание. Вычислить определитель $left| begin{array}{rrr}{3} & {3} & {-1} \ {4} & {1} & {3} \ {1} & {-2} & {-2}end{array}right|$ с помощью правила Саррюса.
Решение. 
$$+(-1) cdot 4 cdot(-2)-(-1) cdot 1 cdot 1-3 cdot 3 cdot(-2)-3 cdot 4 cdot(-2)=54$$
Ответ. $left| begin{array}{rrr}{3} & {3} & {-1} \ {4} & {1} & {3} \ {1} & {-2} & {-2}end{array}right|=54$
Разложение определителя по строке или столбцу
Определитель равен сумме произведений элементов строки определителя на их
алгебраические дополнения. Обычно выбирают
ту строку/столбец, в которой/ом есть нули. Строку или столбец, по которой/ому ведется разложение, будет обозначать стрелкой.
Пример
Задание. Разложив по первой строке, вычислить определитель $left| begin{array}{lll}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right|$
Решение. $left| begin{array}{lll}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right| leftarrow=a_{11} cdot A_{11}+a_{12} cdot A_{12}+a_{13} cdot A_{13}=$
$1 cdot(-1)^{1+1} cdot left| begin{array}{cc}{5} & {6} \ {8} & {9}end{array}right|+2 cdot(-1)^{1+2} cdot left| begin{array}{cc}{4} & {6} \ {7} & {9}end{array}right|+3 cdot(-1)^{1+3} cdot left| begin{array}{cc}{4} & {5} \ {7} & {8}end{array}right|=-3+12-9=0$
Ответ. $left| begin{array}{lll}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right|=0$
Этот метод позволяет вычисление определителя свести к вычислению определителя более низкого порядка.
Пример
Задание. Вычислить определитель $left| begin{array}{lll}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right|$
Решение. Выполним следующие
преобразования над строками определителя: из второй строки отнимем четыре
первых, а из третьей первую строку, умноженную на семь, в результате, согласно свойствам определителя, получим определитель,
равный данному.
$$left| begin{array}{ccc}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right|=left| begin{array}{ccc}{1} & {2} & {3} \ {4-4 cdot 1} & {5-4 cdot 2} & {6-4 cdot 3} \ {7-7 cdot 1} & {8-7 cdot 2} & {9-7 cdot 3}end{array}right|=$$
$$=left| begin{array}{rrr}{1} & {2} & {3} \ {0} & {-3} & {-6} \ {0} & {-6} & {-12}end{array}right|=left| begin{array}{ccc}{1} & {2} & {3} \ {0} & {-3} & {-6} \ {0} & {2 cdot(-3)} & {2 cdot(-6)}end{array}right|=0$$
Определитель равен нулю, так как вторая и третья строки являются пропорциональными.
Ответ. $left| begin{array}{lll}{1} & {2} & {3} \ {4} & {5} & {6} \ {7} & {8} & {9}end{array}right|=0$
Для вычисления определителей четвертого порядка и выше применяется либо разложение по строке/столбцу, либо приведение
к треугольному виду, либо с помощью теоремы Лапласа.
Разложение определителя по элементам строки или столбца
Пример
Задание. Вычислить определитель
$left| begin{array}{llll}{9} & {8} & {7} & {6} \ {5} & {4} & {3} & {2} \ {1} & {0} & {1} & {2} \ {3} & {4} & {5} & {6}end{array}right|$ , разложив его по элементам какой-то строки или какого-то столбца.
Решение. Предварительно выполним
элементарные преобразования над строками определителя, сделав
как можно больше нулей либо в строке, либо в столбце. Для этого вначале от первой строки отнимем девять третьих,
от второй – пять третьих и от четвертой – три третьих строки, получаем:
$$left| begin{array}{cccc}{9} & {8} & {7} & {6} \ {5} & {4} & {3} & {2} \ {1} & {0} & {1} & {2} \ {3} & {4} & {5} & {6}end{array}right|=left| begin{array}{cccc}{9-1} & {8-0} & {7-9} & {6-18} \ {5-5} & {4-0} & {3-5} & {2-10} \ {1} & {0} & {1} & {2} \ {0} & {4} & {2} & {0}end{array}right|=left| begin{array}{rrrr}{0} & {8} & {-2} & {-12} \ {0} & {4} & {-2} & {-8} \ {1} & {0} & {1} & {2} \ {0} & {4} & {2} & {0}end{array}right|$$
Полученный определитель разложим по элементам первого столбца:
$$left| begin{array}{rrrr}{0} & {8} & {-2} & {-12} \ {0} & {4} & {-2} & {-8} \ {1} & {0} & {1} & {2} \ {0} & {4} & {2} & {0}end{array}right|=0+0+1 cdot(-1)^{3+1} cdot left| begin{array}{rrr}{8} & {-2} & {-12} \ {4} & {-2} & {-8} \ {4} & {2} & {0}end{array}right|+0$$
Полученный определитель третьего порядка также разложим по элементам строки и столбца, предварительно получив нули,
например, в первом столбце. Для этого от первой строки отнимаем две вторые строки, а от третьей – вторую:
$$left| begin{array}{rrr}{8} & {-2} & {-12} \ {4} & {-2} & {-8} \ {4} & {2} & {0}end{array}right|=left| begin{array}{rrr}{0} & {2} & {4} \ {4} & {-2} & {-8} \ {0} & {4} & {8}end{array}right|=4 cdot(-1)^{2+2} cdot left| begin{array}{ll}{2} & {4} \ {4} & {8}end{array}right|=$$
$$=4 cdot(2 cdot 8-4 cdot 4)=0$$
Ответ. $left| begin{array}{cccc}{9} & {8} & {7} & {6} \ {5} & {4} & {3} & {2} \ {1} & {0} & {1} & {2} \ {3} & {4} & {5} & {6}end{array}right|=0$
Замечание
Последний и предпоследний определители можно было бы и не вычислять,
а сразу сделать вывод о том, что они равны нулю, так как содержат пропорциональные строки.
Приведение определителя к треугольному виду
С помощью элементарных преобразований над строками или столбцами определитель приводится к треугольному виду и тогда его
значение, согласно свойствам определителя, равно произведению
элементов стоящих на главной диагонали.
Пример
Задание. Вычислить определитель
$Delta=left| begin{array}{rrrr}{-2} & {1} & {3} & {2} \ {3} & {0} & {-1} & {2} \ {-5} & {2} & {3} & {0} \ {4} & {-1} & {2} & {-3}end{array}right|$ приведением его к треугольному виду.
Решение. Сначала делаем нули в первом столбце под главной диагональю. Все преобразования
будет выполнять проще, если элемент $a_{11}$ будет
равен 1. Для этого мы поменяем местами первый и второй столбцы определителя, что, согласно свойствам определителя,
приведет к тому, что он сменит знак на противоположный:
$$Delta=left| begin{array}{rrrr}{-2} & {1} & {3} & {2} \ {3} & {0} & {-1} & {2} \ {-5} & {2} & {3} & {0} \ {4} & {-1} & {2} & {-3}end{array}right|=-left| begin{array}{rrrr}{1} & {-2} & {3} & {2} \ {0} & {3} & {-1} & {2} \ {2} & {-5} & {3} & {0} \ {-1} & {4} & {2} & {-3}end{array}right|$$
Далее получим нули в первом столбце, кроме элемента $a_{11}$ ,
для этого из третьей строки вычтем две первых, а к четвертой строке прибавим первую, будем иметь:
$$Delta=-left| begin{array}{rrrr}{1} & {-2} & {3} & {2} \ {0} & {3} & {-1} & {2} \ {0} & {-1} & {-3} & {-4} \ {0} & {2} & {5} & {-1}end{array}right|$$
Далее получаем нули во втором столбце на месте элементов, стоящих под главной диагональю. И снова, если
диагональный элемент будет равен $pm 1$ , то
вычисления будут более простыми. Для этого меняем местами вторую и третью строки (и при этом меняется на
противоположный знак определителя):
$$Delta=left| begin{array}{rrrr}{1} & {-2} & {3} & {2} \ {0} & {-1} & {-3} & {-4} \ {0} & {3} & {-1} & {2} \ {0} & {2} & {5} & {-1}end{array}right|$$
Далее делаем нули во втором столбце под главной диагональю, для этого поступаем следующим образом:
к третьей строке прибавляем три вторых, а к четвертой – две вторых строки, получаем:
$$Delta=left| begin{array}{rrrr}{1} & {-2} & {3} & {2} \ {0} & {-1} & {-3} & {-4} \ {0} & {0} & {-10} & {-10} \ {0} & {0} & {-1} & {-9}end{array}right|$$
Далее из третьей строки выносим (-10) за определитель и делаем нули в третьем столбце под
главной диагональю, а для этого к последней строке прибавляем третью:
$$Delta=-10 left| begin{array}{rrrr}{1} & {-2} & {3} & {2} \ {0} & {-1} & {-3} & {-4} \ {0} & {0} & {1} & {1} \ {0} & {0} & {-1} & {-9}end{array}right|=$$
$$=-10 cdot left| begin{array}{cccc}{1} & {-2} & {3} & {2} \ {0} & {-1} & {-3} & {-4} \ {0} & {0} & {1} & {1} \ {0} & {0} & {0} & {-8}end{array}right|=(-10) cdot 1 cdot(-1) cdot 1 cdot(-8)=-80$$
Ответ. $Delta=-80$
Теорема Лапласа
Теорема
Пусть $Delta$ – определитель
$n$-го порядка. Выберем в нем произвольные
$k$ строк (или столбцов), причем
$k leq n-1$ . Тогда сумма произведений всех
миноров
$k$-го порядка, которые содержатся в выбранных
$k$ строках (столбцах), на их
алгебраические дополнения равна определителю.
Пример
Задание. Используя теорему Лапласа, вычислить определитель
$left| begin{array}{rrrrr}{2} & {3} & {0} & {4} & {5} \ {0} & {1} & {0} & {-1} & {2} \ {3} & {2} & {1} & {0} & {1} \ {0} & {4} & {0} & {-5} & {0} \ {1} & {1} & {2} & {-2} & {1}end{array}right|$
Решение. Выберем в данном определителе пятого порядка две строки –
вторую и третью, тогда получаем (слагаемые, которые равны нулю, опускаем):
$$left| begin{array}{rrrrr}{2} & {3} & {0} & {4} & {5} \ {0} & {1} & {0} & {-1} & {2} \ {3} & {2} & {1} & {0} & {1} \ {0} & {4} & {0} & {-5} & {0} \ {1} & {1} & {2} & {-2} & {1}end{array}right|=left| begin{array}{cc}{1} & {-1} \ {4} & {-5}end{array}right| cdot(-1)^{2+4+2+4} cdot left| begin{array}{ccc}{2} & {0} & {5} \ {3} & {1} & {1} \ {1} & {2} & {1}end{array}right|+$$
$$+left| begin{array}{ll}{1} & {2} \ {4} & {0}end{array}right| cdot(-1)^{2+4+2+5} cdot left| begin{array}{rrr}{2} & {0} & {4} \ {3} & {1} & {0} \ {1} & {2} & {-2}end{array}right|+left| begin{array}{cc}{-1} & {2} \ {-5} & {0}end{array}right| cdot(-1)^{2+4+5} cdot left| begin{array}{ccc}{2} & {3} & {0} \ {3} & {2} & {1} \ {1} & {1} & {2}end{array}right|=$$
$$=-23+128+90=195$$
Ответ. $left| begin{array}{rrrrr}{2} & {3} & {0} & {4} & {5} \ {0} & {1} & {0} & {-1} & {2} \ {3} & {2} & {1} & {0} & {1} \ {0} & {4} & {0} & {-5} & {0} \ {1} & {1} & {2} & {-2} & {1}end{array}right|=195$
Читать дальше: обратная матрица.
Содержание
§
Вспомогательная страница к разделу ОПРЕДЕЛИТЕЛЬ
Приемы вычисления определителей, зависящих от параметров
Довольно часто на практике возникает необходимость вычислять определители, элементы которых зависят от параметров. Метод Гаусса оказывается не слишком приспособленным для такой задачи.
П
Пример. Вычислить
$$
left|
begin{array}{cccc}
{color{Red} alpha } +1 &{color{Red} alpha } ^2+1 &{color{Red} alpha } ^2-1 & {color{Red} alpha } \
{color{Red} alpha } ^2+{color{Red} alpha } +1 & {color{Red} alpha } ^2- {color{Red} alpha } +1 & {color{Red} alpha } ^2 & 1 \
2,{color{Red} alpha } +1 &{color{Red} alpha } ^2+2 & {color{Red} alpha } & {color{Red} alpha } ^2-1 \
2,{color{Red} alpha } & 2, {color{Red} alpha } ^2+2,{color{Red} alpha } +1 & {color{Red} alpha } ^2-{color{Red} alpha } -1 & {color{Red} alpha } +1
end{array}
right| .
$$
Решение. Разложение по общей формуле даст величину этого определителя в виде полинома от
$ {color{Red} alpha } $. С другой стороны, если для его вычисления мы попытаемся применить
метод Гаусса, то на первом же шаге элементы преобразованного определителя окажутся дробно–рациональными
функциями от параметра $ {color{Red} alpha } $. Понятно, что после приведения определителя
к треугольному виду и
перемножения стоящих на диагонали дробей мы, в конце концов, получим тот же
ответ полиномиального вида, но сам
факт, что для его получения потребовалось «выйти за пределы» множества
полиномиальных функций не свидетельствует в пользу метода
Гаусса…
♦
Универсальных методов вычисления подобных определителей
(отличных, естественно, от определения) не существует. Успех во многом будет зависеть от искусства
вычислителя. Здесь мы покажем несколько полезных приемов, которые иногда помогают.
Выделение линейных множителей
Этот прием основан на свойстве полиномиальности определителя как функции его элементов. Если элементы зависят — также полиномиально — от одного параметра, то можно попытаться определить линейные множители «полинома из ответа»: иногда из особенностей определителя очевидно при каких значениях параметра этот определитель обращается в нуль.
П
Пример. Вычислить определитель
$$left|begin{array}{ccccc}
1&1&1&dots&1\
1&2-x&1&dots&1\
1&1&3-x&dots&1\
vdots& & &ddots&vdots\
1&1&1&dots&n+1-x
end{array}right|.$$
Решение. Ответом в этой задаче должен быть полином по $ x_{} $. Обозначим его $ F(x)_{} $ и попробуем догадаться какие корни он может иметь. Обратим внимание на структуру определителя. Если положить $ x=1_{} $, то вторая строка будет одинаковой с первой, на основании свойства
3
определителя, при этом значении $ x_{} $ будем иметь $ F(1)=0 $. Аналогично убеждаемся, что $ F(2)=0, dots, F(n)=0 $. Итак, на основании теоремы Безу, имеем:
$$ F(x) equiv F_1(x) (x-1)times dots times (x-n) , $$
где через $ F_1(x) $ обозначен полином, являющийся частным от деления $ F(x)_{} $ на произведение линейных множителей. Оценим степень полинома $ F(x)_{} $. Очевидно, что при разложении определителя по общей формуле из определения, каждое слагаемое представляет произведение элементов определителя и будет полиномом по $ x_{} $. В каждом слагаемом максимально возможная степень может быть достигнута если каждый элемент в произведении будет иметь максимально возможную степень — в нашем случае равную $ 1_{} $. Отсюда с неизбежностью следует, что самым
«большим» по степени может быть только главный член определителя, т.е. произведение элементов его главной диагонали:
$$
F(x) equiv 1cdot (2-x)times dots times (n+1-x) + dots ,
$$
где многоточия скрывают все оставшиеся слагаемые полного разложения определителя и имеют степени меньшие степени выделенного слагаемого. Выделяем из этого слагаемого степень $ x_{} $:
$$
F(x) equiv (-1)^n x^n + dots .
$$
Мы получили оценку степени $ F(x)_{} $ вместе с выражением для его старшего коэффициента.
Ответ. $ (-1)^{n} (x-1)times dots times (x-n) $.
П
Пример. Вычислить определитель
$$D=left|begin{array}{cccc}
0&x&y&z\
x&0&y&z\
y&z&0&x\
z&y&x&0
end{array}right|.$$
Решение. Если к первому столбцу прибавить остальные, то обнаружится, что определитель делится на $ x+y+z $; если к первому столбцу прибавить второй и вычесть третий и четвертый, то выделится множитель $ y+z-x $; если к первому столбцу прибавить третий и вычесть второй и четвертый, то выделится множитель $ x-y+z $; наконец, если к первому столбцу прибавить четвертый и вычесть второй и третий, то выделится множитель $ x+y-z $. Считая $ x,y,z $ независимыми переменными, заключаем, что все эти четыре множителя попарно взаимно просты, и значит, определитель — как полином от $ x,y,z $ — делится на их произведение $ (x+y+z)(y+z-x)(x-y+z)(x+y-z) $.
Это произведение содержит член $ z^4 $ с коэффициентом $ (-1) $, а сам определитель содержит тот же член с коэффициентом $ +1 $. Следовательно,
$$
D=-(x+y+z)(y+z-x)(x-y+z)(x+y-z)
=x^4+y^4+z^4-2x^2y^2-2x^2z^2-2y^2z^2 . $$
♦
Метод рекуррентных соотношений
Основная идея метода заключается в том, что некоторые определители можно свести к вычислению определителей, имеющих аналогичный вид, но меньший порядок. Если удается установить вид этой зависимости в виде явной формулы, то эта формула — последовательным ее применением — позволит нам «спуститься» к определителям малых порядков.
П
Пример. Вычислить определитель
$$D_n=left|begin{array}{ccccc}
a_1&x&x&dots&x\
x&a_2&x&dots&x\
x&x&a_3&dots&x\
vdots&&&ddots&vdots\
x&x&x&dots&a_n
end{array}right|.$$
Решение. Представив элемент в правом нижнем углу в виде $ a_n=x+(a_n-x) $, можем определитель $ D_n $ разбить на сумму двух определителей:
$$D_n=left|begin{array}{ccccc}
a_1&x&x&dots&x\
x&a_2&x&dots&x\
x&x&a_3&dots&x\
vdots&&&ddots&vdots\
x&x&x&dots&x
end{array}right|+left|begin{array}{ccccc}
a_1&x&x&dots&0\
x&a_2&x&dots&0\
x&x&a_3&dots&0\
vdots&&&ddots&vdots\
x&x&x&dots&a_n-x
end{array}right|.$$
В первом определителе последний столбец вычтем из остальных, а второй определитель разложим по последнему столбцу:
$$D_n=x(a_1-x)(a_2-x)timesdotstimes(a_{n-1}-x)+(a_n-x)D_{n-1} .$$
Это и есть рекуррентное соотношение. Подставляя в него аналогичное выражение для
$ D_{n-1} $, найдем
$$begin{array}{l}
D_n=x(a_1-x)(a_2-x)timesdotstimes(a_{n-1}-x)+\
+x(a_1-x)(a_2-x)timesdotstimes(a_{n-2}-x)(a_n-x)+D_{n-2}(a_{n-1}-x)(a_n-x).
end{array}$$
Повторяя то же рассуждение $ n-1 $ раз и замечая, что $ D_1=a_1=x+(a_1-x) $, найдем
$$begin{array}{l}
D_n=x(a_1-x)(a_2-x)dots(a_{n-1}-x)+x(a_1-x)timesdotstimes(a_{n-2}-x)(a_n-x)+dots+\
+x(a_2-x)timesdotstimes(a_n-x)+(a_1-x)(a_2-x)timesdotstimes(a_n-x)=\
displaystyle
=x(a_1-x)(a_2-x)timesdotstimes(a_n-x)left( frac{1}{x}+frac{1}{a_1-x}+dots+frac{1}{a_n-x}right).
end{array}$$
♦
?
Вычислить определитель
$$left|begin{array}{ccccc}
a_1b_1&a_1b_2&a_1b_3&dots&a_1b_n\
a_1b_2&a_2b_2&a_2b_3&dots&a_2b_n\
a_1b_3&a_2b_3&a_3b_3&dots&a_3b_n\
vdots&&&&vdots\
a_1b_n&a_2b_n&a_3b_n&dots&a_nb_n
end{array}right|.$$
Ответ. $ displaystyle a_1b_nprod_{j=1}^{n-1}(a_{j+1}b_j-a_jb_{j+1}) $ .
П
Пример. Вычислить определитель
$$D_n=left|begin{array}{ccccc}
a_1&x&x&dots&x\
y&a_2&x&dots&x\
y&y&a_3&dots&x\
vdots&&&ddots&vdots\
y&y&y&dots&a_n
end{array}right|.$$
Решение начинается тем же приемом, что и в предыдущем примере:
$$ D_n= left|begin{array}{ccccc}
a_1&x&x&dots&x\
y&a_2&x&dots&x\
y&y&a_3&dots&x\
vdots&&&ddots&vdots\
y&y&y&dots&x
end{array}right|+(a_n-x)D_{n-1}=x(a_1-y)(a_2-y)times dots times (a_{n-1}-y)+(a_n-x)D_{n-1} .
$$
Можно было бы идти по проторенному пути и «разделывать» определитель $ D_{n-1} $ с использованием уже полученной формулы. Имеется, однако, более эффективный прием. Заметим, что начальный определитель симметричен относительно вхождения параметров $ x_{} $ и $ y_{} $, и эта симметрия должна проявляться в окончательном ответе. Следовательно, наряду с полученным выражением, будет справедливо и следующее:
$$
D_n=y(a_1-x)(a_2-x)times dots times (a_{n-1}-x)+(a_n-y)D_{n-1} ,
$$
произведенное перестановкой параметров $ x leftrightarrow y $. В результате мы получаем систему уравнений для определения двух неизвестных величин $ D_{n} $ и $ D_{n-1} $. Решаем эту систему относительно $ D_n $ (например, по формулам Крамера):
$$ D_n = frac{displaystyle yprod_{k=1}^n(a_k-x)-xprod_{k=1}^n(a_k-y)}{y-x} . $$
♦
Прием, позволивший решить последний пример, можно отнести к случаю «удачно заметил» (свойство симметрии) — но, повторюсь, универсального способа вычисления определителей, зависящих от параметров, не существует.
В примере следующего пункта метод рекуррентных соотношений комбинируется с методом выделения линейных множителей.
Определитель Вандермонда
§
Подробнее о матрице, определителе Вандермонда и их применении
☞
ЗДЕСЬ.
П
Пример. Вычислить определитель Вандермонда
$$
V(x_1,dots,x_n)=
left|begin{array}{ccccc}
1 &x_1&x_1^2&ldots&x_1^{n-1}\
1 &x_2&x_2^2&ldots&x_2^{n-1}\
vdots& &&& vdots\
1 &x_n&x_n^2&ldots&x_n^{n-1}
end{array}right|_{ntimes n}
$$
Решение. Поясним идею для случая $ n=4 $. Выражение для $ V(x_1,x_2,x_3,x_4) $ — если его формально разложить по общей формуле — будет полиномом относительно своих переменных. Рассмотрим его как полином от переменной $ x_4 $, которую — для удобства — временно переобозначим через $ x $:
$$
tilde V(x)=left|begin{array}{llll}
1 &x_1&x_1^2&x_1^3\
1 &x_2&x_2^2&x_2^3\
1 &x_3&x_3^2&x_3^3\
1 &x&x^2&x^3\
end{array}right| ;
$$
оставшиеся переменные будем считать параметрами.
Если подставить в этот определитель $ x=x_1 $, то определитель обратится в нуль (как имеющий одинаковые строки см. свойство
3
☞
ЗДЕСЬ). Аналогичные рассуждения верны для $ x=x_2 $ и $ x=x_3 $. Таким образом, полином $ tilde V(x) $ имеет корни $ x_1,x_2,x_3 $,
а его степень — если разложить по последней строке — не превышает $ 3 $. Следовательно, этот полином должен иметь следующее разложение на линейные множители:
$$
tilde V(x) equiv A(x-x_1)(x-x_2)(x-x_3) ;
$$
при этом константа $ A $ зависит только от $ x_1, x_2,x_3 $. Выражение для нее можно найти, если сообразить, что она является старшим коэффициентом полинома $ tilde V(x) $, т.е. коэффициентом при степени $ x^3 $. Этот коэффициент можно «извлечь» из исходного определителя — это алгебраическое дополнение элемента определителя, стоящего в правом нижнем углу, т.е.
$$
left|begin{array}{lll}
1 &x_1&x_1^2\
1 &x_2&x_2^2\
1 &x_3&x_3^2
end{array}right| .
$$
Но этот определитель — тот же определитель Вандермонда, только порядка меньшего исходного. Возвращая переменной $ x $ ее исходное значение, получаем рекуррентное соотношение:
$$ V(x_1,x_2,x_3,x_4)equiv V(x_1,x_2,x_3) (x_4-x_1)(x_4-x_2)(x_4-x_3) . $$
Раскладываем определитель в правой части по той же схеме:
$$ V(x_1,x_2,x_3) equiv left|begin{array}{ll}
1 &x_1\
1 &x_2
end{array}right| (x_3-x_1)(x_3-x_2) equiv (x_3-x_1)(x_3-x_2)(x_2-x_1) .
$$
Таким образом,
$$
V(x_1,x_2,x_3,x_4)=
$$
$$
=(x_2-x_1)(x_3-x_1)(x_3-x_2)(x_4-x_1)(x_4-x_2)(x_4-x_3) .
$$
А в общем случае получаем ответ
$$ V(x_1,dots,x_n)= prod_{1le j < k le n} (x_k-x_j) . $$
♦
Определитель трёхдиагональной матрицы
Более сложный пример применения метода дает задача вычисления определителя трехдиагональной матрицы, представленного в следующем виде (определитель Якоби):
$$
{mathfrak J}_n =
left|begin{array}{ccccccc}
a_1 &b_1&0&0& dots & 0 & 0\
-c_2 &a_2&b_2&0& dots & 0 & 0\
0 &-c_3&a_3&b_3& dots & 0 & 0\
vdots &&& &ddots&& vdots \
0 &0&0&0& dots & a_{n-1} & b_{n-1}\
0 &0&0&0& dots & -c_n & a_{n}
end{array}right|_{ntimes n} .
$$
Формальное вычисление этого определителя (в соответствии с определением) даст
полином по $ a_1,dots,a_n,b_1,dots,b_{n-1},c_2,dots,c_n $, линейный
по каждой из этих переменных. Если разложить $ {mathfrak J}_n $ по последней строке, то
получим:
$$
begin{matrix}
{mathfrak J}_n&=&a_n{mathfrak J}_{n-1}+b_{n-1}c_n{mathfrak J}_{n-2}
=a_n(a_{n-1}{mathfrak J}_{n-2}+b_{n-2}c_{n-1}{mathfrak J}_{n-3})+
b_{n-1}c_n{mathfrak J}_{n-2}= \
&=&(a_na_{n-1}+b_{n-1}c_n){mathfrak J}_{n-2}+a_nb_{n-2}c_{n-1}{mathfrak J}_{n-3}=
dots
end{matrix}
$$
П
Пример.
$ {mathfrak J}_2=a_1a_2+b_1c_2 $ ,
$ {mathfrak J}_3=a_1a_2a_3+a_1b_2c_3+b_1c_2a_3 $,
$$
{mathfrak J}_5=a_1a_2a_3a_4a_5+b_1c_2a_3a_4a_5+a_1b_2c_3a_4a_5+a_1a_2b_3c_4a_5
+a_1a_2a_3b_4c_5+b_1c_2b_3c_4a_5+b_1c_2a_3b_4c_5+a_1b_2c_3b_4c_5 .
$$
Т
Теорема. Значение $ {mathfrak J}_n $ равно сумме главного члена $ a_1a_2times dots times a_{n} $ и всевозможных произведений, получающихся из него заменой одной или нескольких пар соседних множителей $ a_ja_{j+1} $ на $ b_jc_{j+1} $.
Частный случай определителя Якоби — континуант:
$$
Q_n(x_1,x_2,dots,x_{n})
=
left|begin{array}{ccccccc}
x_1 &1&0&0& dots & 0 & 0\
-1 &x_2&1&0& dots & 0 & 0\
0 &-1&x_3&1& dots & 0 & 0\
vdots &&& &ddots&&vdots \
0 &0&0&0& dots & x_{n-1} & 1\
0 &0&0&0& dots & -1 & x_{n}
end{array}right|_{ntimes n}
$$
Т
Теорема. Континуант равен сумме произведения $ x_1cdot x_2 times dots times x_n $ и всевозможных произведений, получающихся из него вычеркиванием пар соседних множителей (и добавлением $ 1 $ в случае четного $ n $).
П
Пример.
$$
begin{array}{lcl}
Q_2(x_1,x_2)&=&x_1x_2+1 , \
Q_3(x_1,x_2,x_3)&=& x_1x_2x_3+x_3+x_1 , \
Q_6(x_1,x_2,x_3,x_4,x_5,x_6)&=&x_1x_2x_3x_4x_5x_6+\
&&+x_3x_4x_5x_6
+x_1x_4x_5x_6+ x_1x_2x_5x_6+ x_1x_2x_3x_6+x_1x_2x_3x_4+ \
&&+x_5x_6+x_1x_6+x_1x_2+x_1x_4+x_3x_4+x_3x_6+1 .
end{array}
$$
Исследуем еще один частный случай определителя Якоби — при одинаковых элементах на диагоналях
$$a_1=dots=a_n = a, b_1=dots=b_{n-1} = b,
c_2=dots=c_n = c ; $$
таким образом:
$$
{mathfrak J}_n=
left|begin{array}{ccccccc}
a &b&0&0& dots & 0 & 0\
c &a&b&0& dots & 0 & 0\
0 &c&a&b& dots & 0 & 0\
vdots &&& &ddots&& vdots \
0 &0&0&0& dots & a & b\
0 &0&0&0& dots & c & a
end{array}right|_{ntimes n}
.
$$
В этом случае уравнение, связывающее определители трех последовательных порядков, принимает вид:
$$ {mathfrak J}_n=a{mathfrak J}_{n-1}-bc{mathfrak J}_{n-2} .$$
Оно может быть решено применением общего приема решения линейного разностного уравнения.
П
Пример. Вычислить
$$
left|begin{array}{cccccc}
2 &2&0& dots & 0 & 0\
1 & 2 &2& dots & 0 & 0\
0 &1&2& dots & 0 & 0\
vdots && ddots &ddots&& vdots\
0 &0&0& dots & 2 & 2\
0 &0&0& dots & 1 & 2
end{array}right|_{ntimes n} .
$$
Решение. Разностное уравнение имеет вид
$ {mathfrak J}_n=2{mathfrak J}_{n-1}-2{mathfrak J}_{n-2} $.
Cтроим соответствующее ему характеристическое уравнение и находим его корни: $ lambda_{1,2}=1 pm mathbf i $. Поскольку они различны, решение разностного уравнения ищем в виде
$$ C_1 (1+mathbf i )^n+C_2 (1-mathbf i)^n .$$
Для определения констант $ C_1 $ и $ C_2 $
вычислим определители первого и второго порядков: $ {mathfrak J}_1=2,{mathfrak J}_2=2 $.
$$
left{
begin{array}{llll}
2&=&C_1(1+mathbf i)&+C_2(1+mathbf i), \
2&=&C_1(1+mathbf i)^2&+C_2(1+mathbf i)^2
end{array}
right. quad Rightarrow quad C_1=frac{1-mathbf i}{2}, C_2=frac{1+mathbf i}{2}
$$
Ответ.
$ {mathfrak J}_n=(1+mathbf i)^{n-1}+(1-mathbf i)^{n-1} $.
Хотя исходный определитель имеет явно вещественное значение, ответ, тем не менее, получился мнимым. Объяснение этого «парадокса»
☞
ЗДЕСЬ.
Ганкелевы полиномы
Ганкелева матрица порядка $ k_{} $ — это квадратная матрица вида
$$
left(begin{array}{llllll}
color{Brown}c_0 & color{Blue}c_1 & color{Green}c_2 & color{Violet}c_3 & dots & c_{k-1} \
color{Blue}c_1 & color{Green}c_2 & color{Violet}c_3 & c_4 & dots & c_k \
color{Green}c_2 & color{Violet}c_3 & c_4 & &dots & c_{k+1} \
color{Violet}c_3 & c_4 & & & & \
vdots & & & ddots & vdots \
c_{k-1} & c_{k} & c_{k+1} & &dots & c_{2k-2}
end{array}
right)_{ktimes k}= left[ c_{j+k}right]_{j,k=0}^{k-1} .
$$
Элементы числовой последовательности
$$ {c}= c_0,c_1,dots, c_{2k-2},dots $$
называются образующими ганкелевой матрицы.
Определитель ганкелевой матрицы порядка $ k $ будем обозначать $ H_{k} $.
Если в ганкелевой матрице порядка $ k+1 $ заменить последнюю строку на $ left[ 1,x,x^2,dots,x^{k} right] $, то определитель полученной матрицы
$$
mathcal H_k(x) =
left|
begin{array}{lllll}
c_0 & c_1 & c_2 & ldots & c_{k} \
c_1 & c_2 & c_3 &ldots & c_{k+1} \
vdots & & & ddots& vdots \
c_{k-1} & c_{k} & c_{k+1} & ldots & c_{2k-1} \
1 & x & x^2 & ldots & x^{k}
end{array} right|_{(k+1) times (k+1)}
$$
будет полиномом по $ x_{} $; он называется ганкелевым полиномом k-го порядка (порожденным последовательностью $ {c} $). Его каноническое представление имеет коэффициентами числовые определители $ k_{} $-го порядка:
$$
mathcal H_k(x)equiv x^{k}
left|
begin{array}{lllll}
c_0 & c_1 & ldots & c_{k-2} & c_{k-1} \
c_1 & c_2 & ldots & c_{k-1} & c_{k} \
vdots & & ddots& & vdots \
c_{k-1} & c_{k} & ldots & c_{2k-3} & c_{2k-2}
end{array} right|- x^{k-1}
left|
begin{array}{lllll}
c_0 & c_1 & ldots & c_{k-2} & c_{k} \
c_1 & c_2 & ldots & c_{k-1} & c_{k+1} \
vdots & & ddots& & vdots \
c_{k-1} & c_{k} & ldots & c_{2k-3} & c_{2k-1}
end{array} right|+
$$
$$
+ dots
+(-1)^k
left|
begin{array}{lllll}
c_1 & c_2 & ldots & c_{k-1} & c_{k} \
c_2 & c_3 & ldots & c_{k} & c_{k+1} \
vdots & & ddots& & vdots \
c_{k} & c_{k+1} & ldots & c_{2k-2} & c_{2k-1}
end{array} right| .
$$
Коэффициенты будем обозначать $ h_{kj} $; таким образом
$$
mathcal H_k(x)equiv h_{k0} x^k +h_{k1} x^{k-1} +dots + h_{kk} quad mbox{ при } quad h_{k0}= H_k ;
$$
Коэффициент $ h_{k0} $ может обращаться в нуль, так что степень ганкелевого полинома $ k_{} $-го порядка может оказаться меньшей $ k_{} $.
Т
Теорема [Якоби, Йоахимшталь].1) Любые три ганкелевых полинома $ mathcal H_{k-2}(x), mathcal H_{k-1}(x), mathcal H_{k}(x) $
связаны тождеством
$$
H_k^2mathcal H_{k-2}(x) + left(H_kh_{k-1,1}-H_{k-1}h_{k1}-H_kH_{k-1}xright)mathcal H_{k-1}(x) + H_{k-1}^2 mathcal H_{k}(x) equiv 0 , .
$$
Это тождество позволяет организовать вычисление ганкелевого полинома, рекурсивное по порядку этого полинома:
$ mathcal H_{k}(x) $ вычисляется через ранее вычисленные $ mathcal H_{k-1}(x) $ и $ mathcal H_{k-2}(x) $. Подробнее
☞
ЗДЕСЬ.
Представление определителя в виде суммы определителей
П
Пример. Вычислить определитель
$$D_n=left|begin{array}{cccc}
a_1+b_1&a_1+b_2&dots&a_1+b_n\
a_2+b_1&a_2+b_2&dots&a_2+b_n\
dots&&&dots\
a_n+b_1&a_n+b_2&dots&a_n+b_n
end{array}right|.$$
Решение. Определитель раскладывается по первой строке на два определителя, каждый из них по второй строке снова раскладывается на два определителя и т.д. Дойдя до последней строки, получим $ 2^n $ определителей.
Если при каждом разложении за первые слагаемые принимать числа $ a_i $, а за вторые — числа $ b_j $, то строки полученных определителей будут либо вида $ (a_i,a_i,dots,a_i) $, либо вида $ (b_1,b_2,dots,b_n) $. Две строки первого типа пропорциональны, а второго типа равны. При $ n>2 $ в каждый получившийся определитель попадут по крайней мере две строки одного типа, и он обратится в нуль. Таким образом,
$$D_n=0 npu n>2, D_1=a_1+b_1,quad D_2=left|begin{array}{cc}
a_1&a_1\
b_1&b_2
end{array}right|+left|begin{array}{cc}
b_1&b_2\
a_2&a_2
end{array}right|=(a_1-a_2)(b_2-b_1).$$
♦
?
Вычислить определитель методом представления его в виде суммы определителей
$$left|begin{array}{ccccc}
x_1&a_1b_2&a_1b_3&dots&a_1b_n\
a_2b_1&x_2&a_2b_3&dots&a_2b_n\
a_3b_1&a_3b_2&x_3&dots&a_3b_n\
vdots&vdots&vdots&ddots&vdots\
a_nb_1&a_nb_2&a_nb_3&dots&x_n
end{array}right|.$$
Ответ. $$(x_1-a_1b_1)(x_2-a_2b_2)times dots times (x_n-a_nb_n)
times
$$
$$
times left(1+frac{a_1b_1}{x_1-a_1b_1}+frac{a_2b_2}{x_2-a_2b_2}+dots+frac{a_nb_n}{x_n-a_nb_n}right) .$$
Увеличение порядка определителя
П
Пример. Вычислить определитель
$$
det left[ s_{j+k}x-s_{j+k+1} right]_{j,k=0}^{n-1} = left| begin{array}{llll}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} \
dots & & & dots \
s_{n-1}x-s_{n} & s_{n}x-s_{n+1} & dots & s_{2n-2}x-s_{2n-1}
end{array} right|_{ntimes n}
$$
при заданных числовых значениях $ s_0,s_1,dots,s_{2n-1} $.
Решение. Здесь каждый элемент определителя зависит от переменной $ x $. Как уже отмечалось в начале раздела, применение метода Гаусса к вычислению такого определителя неэффективно. Сформируем новый определитель порядка $ n+1 $, дополнив исходный одной строкой и одним столбцом:
$$
left| begin{array}{llllc}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 0 \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 0 \
dots & & & dots & dots \
s_{n-1}x-s_{n } & s_{n}x-s_{n+1} & dots & s_{2n-2}x-s_{2n-1}& 0 \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} .
$$
Разложение нового определителя по последнему столбцу приведет к исходному определителю. С другой стороны, выполним элементарные преобразования нового определителя: прибавим последнюю строку к предпоследней:
$$
left| begin{array}{llllc}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 0 \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 0 \
dots & & & dots & dots \
s_{n-1}x & s_{n}x & dots & s_{2n-2}x& 1 \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} ;
$$
вынесем общий множитель:
$$
xleft| begin{array}{llllc}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 0 \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 0 \
dots & & & dots & dots \
s_{n-1} & s_{n} & dots & s_{2n-2}& 1/x \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} ;
$$
предпоследнюю строку прибавим к предыдущей:
$$
xleft| begin{array}{llllc}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 0 \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 0 \
dots & & & dots & dots \
s_{n-2}x & s_{n-1}x & dots & s_{2n-3}x& 1/x \
s_{n-1} & s_{n} & dots & s_{2n-2}& 1/x \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} ;
$$
и снова вынесем общий множитель:
$$
x^2left| begin{array}{lllll}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 0 \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 0 \
dots & & & dots & dots \
s_{n-2} & s_{n-1} & dots & s_{2n-3}& 1/x^2 \
s_{n-1} & s_{n} & dots & s_{2n-2}& 1/x \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} .
$$
Продолжим процесс по аналогии, в конце концов получим
$$
x^nleft| begin{array}{lllll}
s_0x-s_1&s_1x-s_2&dots& s_{n-1}x-s_{n} & 1/x^n \
s_1x-s_2&s_2x-s_3&dots& s_{n}x-s_{n+1} & 1/x^{n-1} \
dots & & & dots & dots \
s_{n-2}x & s_{n-1}x & dots & s_{2n-3}x& 1/x^2 \
s_{n-1} & s_{n} & dots & s_{2n-2}& 1/x \
s_n & s_{n+1} & dots & s_{2n-1}& 1
end{array} right|_{(n+1)times (n+1)} ,
$$
и внесем множитель в последний столбец:
$$
left| begin{array}{lllll}
s_0&s_1&dots&s_{n-1}&1 \
s_1&s_2&dots&s_n& x \
vdots & && vdots & vdots \
s_{n}&s_{n+1}&dots&s_{2n-1}&x^{n}
end{array} right|_{(n+1)times (n+1)} .
$$
Получившийся определитель имеет порядок больший исходного. Тем не менее, выражения его элементов стали проще с той точки зрения, что переменная оказалась «выметена на край» определителя. Если разложить теперь определитель по последнему столбцу, то коэффициентами при степенях $ x $ становятся числовые определители, для вычисления которых уже можно применять метод Гаусса.
♦
Разобранный прием, на первый взгляд, кажется не вполне естественным; он практически не упоминается в литературе. Тем не менее, он неявно используется в двух методах вычисления характеристического полинома матрицы.
Интерполяция
Для понимания материалов настоящего раздела рекомендуется ознакомиться с разделом “ИНТЕРПОЛЯЦИЯ”.
.
Можно считать излагаемый ниже метод обобщением приведенного выше метода выделения линейных множителей: если матрица имеет полиномиальную зависимость от параметра (параметров), то угадать корни ее определителя — также полинома от этого параметра — удается не всегда, а вот его значения при конкретных величинах параметра (параметров) всегда можно вычислить.
Попробуем решить пример, с которого начинается настоящий раздел.
П
Пример. Вычислить
$$ det A(alpha)=
left|
begin{array}{cccc}
alpha+1 &alpha^2+1 &alpha^2-1 &alpha \
alpha^2+alpha+1 & alpha^2-alpha+1 & alpha^2 & 1 \
2,alpha+1 &alpha^2+2 & alpha & alpha^2-1 \
2,alpha & 2, alpha^2+2,alpha+1 & alpha^2-alpha-1 & alpha+1
end{array}
right| .
$$
Решение. Поскольку каждый элемент определителя является полиномом, то, на основании определения определителя как суммы произведений его элементов, величина определителя также должна быть полиномом по $ alpha_{} $. Обозначим этот полином через $ F(alpha) $. Таким образом, задача сводится к вычислению степени $ deg F $ этого полинома и его коэффициентов. Для решения первой задачи формируем новый определитель, путем вытаскивания из элементов исходного определителя их старших мономов:
$$
left|
begin{array}{cccc}
alpha &alpha^2 &alpha^2 &alpha \
alpha^2 & alpha^2 & alpha^2 & 1 \
2,alpha &alpha^2 & alpha & alpha^2 \
2,alpha & 2, alpha^2 & alpha^2 & alpha
end{array}
right| .
$$
Если этот определитель не равен нулю тождественно по $ alpha_{} $, то его старший моном совпадает со старшим мономом $ F(alpha) $. Новый определитель также зависит от $ alpha_{} $, но характер этой зависимости становится менее сложным, чем у исходного, и для его вычисления можно использовать различные упрощающие соображения. Например, можно вынести
общие множители элементов первого, второго и третьего столбцов (см. свойство
4
☞
ЗДЕСЬ )
$$
=alphacdot alpha^2 cdot alpha
left|
begin{array}{cccc}
1 &1 & alpha &alpha \
alpha & 1 & alpha & 1 \
2 &1 & 1 & alpha^2 \
2 & 2 & alpha & alpha
end{array}
right| =
$$
Далее, вычитаем из последней строки первую, умноженную на $ 2_{} $:
$$
=alpha^4
left|
begin{array}{cccc}
1 &1 & alpha &alpha \
alpha & 1 & alpha & 1 \
2 &1 & 1 & alpha^2 \
0 & 0 & -alpha & -alpha
end{array}
right| =-alpha^5
left|
begin{array}{cccc}
1 &1 & alpha &alpha \
alpha & 1 & alpha & 1 \
2 &1 & 1 & alpha^2 \
0 & 0 & 1 & 1
end{array}
right|
$$
Теперь вычтем из четвертого столбца третий:
$$
=-alpha^5
left|
begin{array}{cccc}
1 &1 & alpha & 0 \
alpha & 1 & alpha & 1-alpha \
2 &1 & 1 & alpha^2 -1 \
0 & 0 & 1 & 0
end{array}
right|
$$
и разложим определитель по последней строке:
$$
= alpha^5
left|
begin{array}{ccc}
1 &1 & 0 \
alpha & 1 & 1-alpha \
2 &1 & alpha^2 -1 \
end{array}
right| .
$$
Поскольку нас интересует только лишь старший моном этого определителя, в элементах последнего столбца оставляем старшие мономы:
$$
alpha^5
left|
begin{array}{ccc}
1 &1 & 0 \
alpha & 1 & -alpha \
2 &1 & alpha^2
end{array}
right| =
alpha^6
left|
begin{array}{ccc}
1 &1 & 0 \
alpha & 1 & -1 \
2 &1 & alpha
end{array}
right| .
$$
Этот определитель можно вычислить «вручную» (при этом, повторюсь, нас интересуют только лишь максимальные по степени $ alpha_{} $ члены его разложения), получаем: $ – alpha^8 $.
Итак, неизвестный полином $ F(alpha) $ имеет степень $ 8_{} $. Для его определения у нас имеется представление этого полинома в форме определителя. При этом считается, что числовые определители мы вычислять умеем. Будем искать полином $ F(alpha) $ как решение задачи интерполяции. Зададим произвольные числовые значения для $ alpha_{} $ — в количестве $ 9_{} $ штук (по числу коэффициентов полинома, требующих определения), вычислим соответствующие числовые определители, составим интерполяционную таблицу:
$$
begin{array}{c|cccc}
alpha & alpha_1 & alpha_2 & dots & alpha_9 \ hline
F & det A (alpha_1) &det A (alpha_2) & dots & det A (alpha_9)
end{array}
$$
и вычислим $ F(alpha) $ по одному из методов вычисления интерполяционного полинома.
На виду лежат два соображения:
1.
имеет смысл в качестве чисел $ alpha_j $ выбирать возможно минимальные по модулю;
2.
поскольку мы уже знаем величину одного из коэффициентов, имеет смысл выбрать — из двух стандартных представлений интерполяционного полинома — форму Ньютона (последнее вычисление делать не придется, можно сократить число узлов интерполяции). Для настоящего примера:
$$
begin{array}{c|rrrccccc}
alpha & 0 & 1 & -1 & 2 & -2 & 3 & -3 & 4 \ hline
F & -4 & -4 & 24 &-222 & 734 & -9616 & 4388 & -98176
end{array}
$$
Ответ. $ -alpha^8-3,alpha^7+3,alpha^6-alpha^5+23,alpha^4-7,alpha^3-11,alpha^2-3,alpha-4 $.
При решении примера настоящего пункта мы столкнулись со следующей задачей. Составим матрицу степеней полиномов, содержащихся в матрице $ A_{} $:
$$
B=left(
begin{array}{cccc}
1 &2 &2 &1 \
2 &2 &2 & 0 \
1 &2 &1 & 2 \
1 & 2 & 2 & 1
end{array}
right) .
$$
Требуется выбрать по одному элементу из каждой строки и каждого столбца этой матрицы, так, чтобы получившаяся сумма стала максимальной:
$$
b_{1j_1}+b_{2j_2}+b_{3j_3}+b_{4j_4} quad mbox{ при различных } quad { j_1,j_2,j_3,j_4} subset { 1,2,3,4 } .
$$
Иными словами, после выбора какого-то кандидата в сумму, из матрицы вычеркиваются строка и столбец его содержащие, и дальнейший выбор осуществляется в оставшейся подматрице. Задача оказывается нетривиальной уже хотя бы потому, что «жадная стратегия» выбора — когда на каждом шаге выбирается максимальный из оставшихся элементов — не приводит к правильному ответу:
$$
B=left(
begin{array}{cc}
4 &3 \
3 &1
end{array}
right) quad Rightarrow quad 4+1 < 3 + 3 .
$$
Оказывается эта задача является примером известной в теории оптимизации задачи о назначениях2).
Задача. Имеется $ n_{} $ работ, которые надо поручить $ n_{} $ работникам. Каждый работник может быть назначен только на одну работу, и каждая работа может быть поручена только одному работнику. Прибыль от труда работника под номером $ j_{} $ при выполнении работы под номером $ k_{} $ известна и равна $ b_{jk} $. Как распределить работы между работниками так, чтобы прибыль стала максимальной?
Разные определители, встречающиеся в ресурсе
Определитель Коши
$$det left[frac{1}{a_j+b_k} right]_{j,k=1}^n=
left|begin{array}{cccc}
frac{1}{a_1+b_1} &frac{1}{a_1+b_2}&ldots&frac{1}{a_1+b_n}\
& & & \
frac{1}{a_2+b_1} &frac{1}{a_2+b_2}&ldots&frac{1}{a_2+b_n}\
& & & \
ldots & & & ldots\
frac{1}{a_n+b_1} &frac{1}{a_n+b_2}&ldots&frac{1}{a_n+b_n}
end{array}right|_{ntimes n} .
$$
Рассматривается
☞
ЗДЕСЬ.
Определитель расстояний
или определитель матрицы расстояний
$$
det left[ |P_jP_k|^2 right]_{j,k=1}^m =left|
begin{array}{cccc}
0 & |P_1P_2|^2 & dots & |P_1P_m|^2 \
|P_1P_2|^2 & 0 & dots & |P_2P_m|^2 \
vdots & & ddots & vdots \
|P_1P_m|^2 & |P_2P_m|^2 & dots & 0
end{array}
right| quad npu quad {P_1,dots,P_m} subset mathbb R^n
$$
Рассматривается
☞
ЗДЕСЬ.
Определители безымянные, но полезные
$$
left|begin{array}{llllllll}
1 & cos x_1 & sin x_1 & cos , 2, x_1 & sin , 2, x_1 & dots & cos , n, x_1 & sin , n, x_1 \
1 & cos x_2 & sin x_2 & cos , 2, x_2 & sin , 2, x_2 & dots & cos , n, x_2 & sin , n, x_2
\
dots & & & & & & & dots \
1 & cos x_{2n+1} & sin x_{2n+1} & cos , 2, x_{2n+1} & sin , 2, x_{2n+1} & dots & cos , n, x_{2n+1} & sin , n, x_{2n+1}
end{array}
right| =
$$
$$
= 2^{2n^2} prod_{0le k < j le 2n} sin frac{x_k-x_j}{2} .
$$
Рассматривается
☞
ЗДЕСЬ.
Задачи
Источники
[1]. Микеладзе Ш.Е. Решение численных уравнений. Тбилиси.Мецниереба. 1965
Вычислим определитель (детерминант) матрицы с помощью функции
МОПРЕД()
или англ. MDETERM, разложением по строке/столбцу (для 3 х 3) и по определению (до 6 порядка).
Определитель матрицы (det) можно вычислить только для квадратных матриц, т.е. у которых количество строк равно количеству столбцов.
Для вычисления определителя в MS EXCEL есть специальная функция
МОПРЕД()
. В аргументе функции необходимо указать ссылку на диапазон ячеек (массив), содержащий элементы матрицы (см.
файл примера
).
Массив может быть задан не только как интервал ячеек, например
A7:B8
, но и как
массив констант
, например
=МОПРЕД({5;4:3;2})
. Запись с использованием массива констант позволяет не указывать элементы в отдельных ячейках, а разместить их в ячейке вместе с функцией. Массив в этом случае указывается по строкам: например, сначала первая строка 5;4, затем через двоеточие записывается следующая строка 3;2. Элементы отделяются точкой с запятой.
Ссылка на массив также может быть указана как ссылка на
именованный диапазон
.
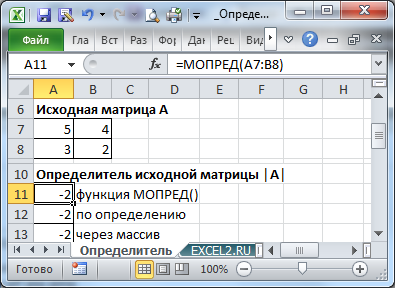
Для матриц порядка 2 можно определитель можно вычислить без использования функции
МОПРЕД()
. Например, для вышеуказанной матрицы выражение
=A7*B8-B7*A8
вернет тот же результат.
Для матрицы порядка 3, например размещенной в диапазоне
A16:C18
, выражение усложняется
=A16*(B17*C18-C17*B18)-B16*(A17*C18-C17*A18)+C16*(A17*B18-B17*A18)
(разложение по строке).
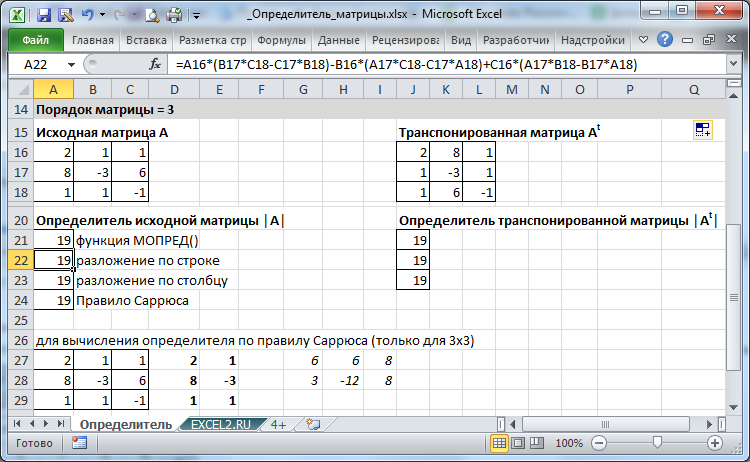
В
файле примера
для матрицы 3 х 3 определитель также вычислен через разложение по столбцу и по правилу Саррюса.
Свойства определителя
Теперь о некоторых свойствах определителя (см.
файл примера
):
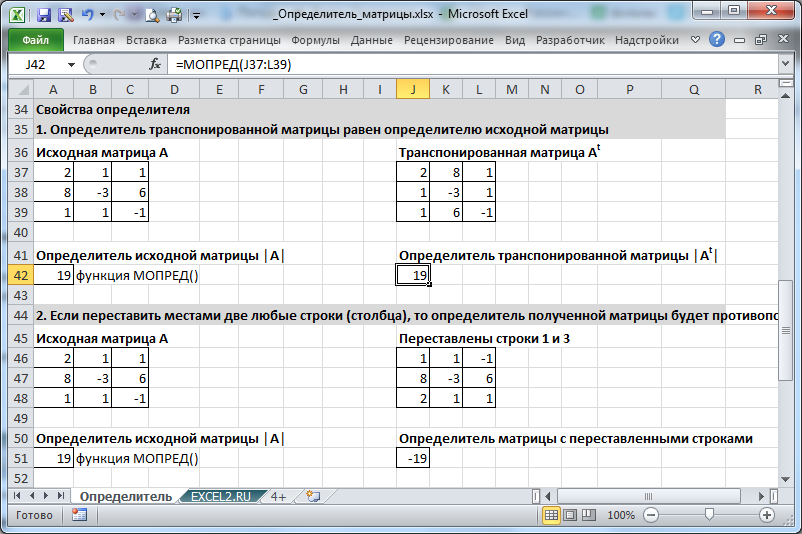
-
Определитель
транспонированной матрицы
равен определителю исходной матрицы
Если в матрице все элементы хотя бы одной из строк (или столбцов) нулевые, определитель такой матрицы равен нулю
Если переставить местами две любые строки (столбца), то определитель полученной матрицы будет противоположен исходному (то есть, изменится знак)
Если все элементы одной из строк (столбца) умножить на одно и тоже число k, то определитель полученной матрицы будет
равен определителю исходной матрицы, умноженному на
k
Если матрица содержит строки (столбцы), являющиеся линейной комбинацией других строк (столбцов), то определитель =0
det(А)=1/det(А
-1
), где А
-1
–матрица обратная
матрице А (А – квадратная невырожденная матрица).
Вычисление определителя матрицы по определению (до 6 порядка включительно)
СОВЕТ
: Этот раздел стоит читать только продвинутым пользователям MS EXCEL. Кроме того материал представляет только академический интерес, т.к. есть функция
МОПРЕД()
.
Как было показано выше для вычисления матриц порядка 2 и 3 существуют достаточно простые формулы и правила. Для вычисления определителя матриц более высокого порядка (без использования функции
МОПРЕД()
) придется вспомнить определение:
Определителем квадратной матрицы порядка
n
х
n
является сумма, содержащая
n!
слагаемых (
=ФАКТР(n)
). Каждое слагаемое представляет собой произведение
n
элементов матрицы, причем в каждом произведении содержится элемент из каждой строки и из каждого столбца матрицы
А
. Перед
k-ым
слагаемым появляется коэффициент
(-1)
, если элементы матрицы
А
в произведении упорядочены по номеру строки, а количество инверсий в
k-ой
перестановке множества номеров столбцов нечетно.

где (
α
1
,
α
2
,…,
α
n
) – перестановка чисел от 1 до
n
, N(
α
1
,
α
2
,…,
α
n
) – число
инверсий в перестановке
, суммирование идёт по всем возможным перестановкам порядка
n
.
Попытаемся разобраться в этом непростом определении на примере матрицы 3х3.
Для матрицы 3 х 3, согласно определения, число слагаемых равно 3!=6, а каждое слагаемое состоит из произведения 3-х элементов матрицы. Ниже приведены все 6 слагаемых, необходимых для вычисления определителя матрицы 3х3:
- а21*а12*а33
- а21*а32*а13
- а11*а32*а23
- а11*а22*а33
- а31*а22*а13
- а31*а12*а23
а21, а12 и т.д. – это элементы матрицы. Теперь поясним, как были сформированы индексы у элементов, т.е. почему, например, есть слагаемое а11*а22*а33, а нет а11*а22*а13.
Посмотрим на формулу выше (см. определение). Предположим, что второй индекс у каждого элемента матрицы (от 1 до n) соответствует номеру столбца матрицы (хотя это может быть номер строки (это не важно т.к. определители матрицы и ее
транспонированной матрицы
равны). Таким образом, второй индекс у первого элемента в произведении всегда равен 1, у второго – 2, у третьего 3. Тогда первые индексы у элементов соответствуют номеру строки и, в соответствии с определением, должны определяться из перестановок чисел от 1 до 3, т.е. из перестановок множества (1, 2, 3).
Теперь понятно, почему среди слагаемых нет а11*а22*а13, т.к. согласно определения (
в каждом произведении содержится элемент из каждой строки и из каждого столбца матрицы
А
),
а в нашем слагаемом нет элемента из строки 3.
Примечание
: Перестановкой из n чисел множества (без повторов) называется любое упорядочивание данного множества, отличающиеся друг от друга лишь порядком входящих в них элементов. Например, дано множество их 3-х чисел: 1, 2, 3. Из этих чисел можно составить 6 разных перестановок:
(1, 2, 3),
(1, 3, 2),
(2, 3, 1),
(2, 1, 3),
(3, 1, 2),
(3, 2, 1). См. статью
Перестановки без повторений: Комбинаторика в MS EXCEL
Число перестановок множества из 3-х чисел =3!=6 (что, конечно, равно числу слагаемых в выражении для расчета определителя, т.к. каждому слагаемому соответствует своя перестановка). Для матрицы 3х3 все перестановки приведены в примечании выше. Можно убедиться, что в каждом слагаемом первые индексы у элементов равны соответствующим числам в перестановке. Например, для слагаемого а21*а12*а33 использована перестановка (2, 1, 3).
СОВЕТ
: Для матрицы 4 порядка существует 4! перестановок, т.е. 26, что соответствует 26 слагаемым, каждое из которых является произведением различных 4-х элементов матрицы. Все 26 перестановок можно найти в статье
Перебор всех возможных Перестановок в MS EXCEL
.
Теперь, когда разобрались со слагаемыми, определим множитель перед каждым слагаемым (он может быть +1 или -1). Множитель определяется через четность числа инверсий соответствующей перестановки.
Примечание
:
Об инверсиях перестановок (и четности числа инверсий) можно почитать, например, в статье
Перестановки без повторений: Комбинаторика в MS EXCEL
Например, первому слагаемому соответствует перестановка (2, 1, 3), у которой 1 инверсия (нечетное число) и, соответственно, -1 в степени 1 равно -1. Второму слагаемому соответствует перестановка (2, 3, 1), у которой 2 инверсии (четное число) и, соответственно, -1 в степени 2 равно 1 и т.д.
Сложив все слагаемые: (-1)*(а21*а12*а33)+(+1)*(а21*а32*а13)+(-1)*(а11*а32*а23)+(+1)*(а11*а22*а33)+(-1)*(а31*а22*а13)+(+1)*(а31*а12*а23) получим значение определителя.
В
файле примера на листе 4+,
и
зменяя порядок матрицы с помощью
элемента управления Счетчик
, можно вычислить определитель матрицы до 6 порядка включительно.
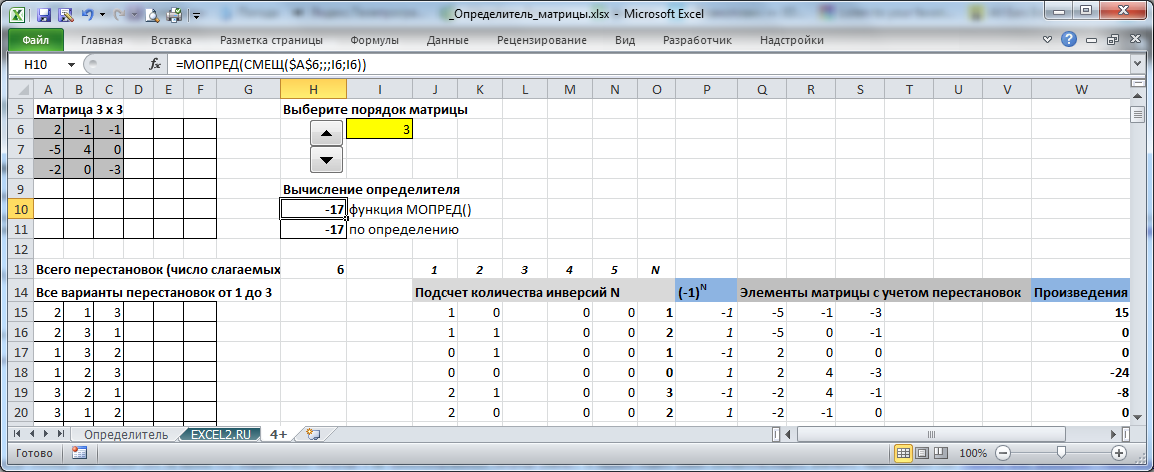
Следует учитывать, что при вычислении матрицы 6-го порядка в выражении используется уже 720 слагаемых (6!). Для 7-го порядка пришлось бы сделать таблицу для 5040 перестановок и, соответственно, вычислить 5040 слагаемых! Т.е. без использования
МОПРЕД()
не обойтись (ну, или можно вычислить определитель вручную методом Гаусса).
Определитель матрицы и его свойства
8 февраля 2018
В этом уроке мы детально рассмотрим несколько ключевые вопросов и определений, благодаря чему вы раз и навсегда разберётесь и с матрицами, и с определителями, и со всеми их свойствами.
Определители — центральное понятие в алгебре матриц. Подобно формулам сокращённого умножения, они будут преследовать вас на протяжении всего курса высшей математики. Поэтому читаем, смотрим и разбираемся досконально.:)
И начнём мы с самого сокровенного — а что такое матрица? И как правильно с ней работать.
Правильная расстановка индексов в матрице
Матрица — это просто таблица, заполненная числами. Нео тут ни при чём.
Одна из ключевых характеристик матрицы — это её размерность, т.е. количество строк и столбцов, из которых она состоит. Обычно говорят, что некая матрица $A$ имеет размер $left[ mtimes n right]$, если в ней имеется $m$ строк и $n$ столбцов. Записывают это так:
[A=left[ mtimes n right]]
Или вот так:
[A=left( {{a}_{ij}} right),quad 1le ile m;quad 1le jle n.]
Бывают и другие обозначения — тут всё зависит от предпочтений лектора/ семинариста/ автора учебника. Но в любом случае со всеми этими $left[ mtimes n right]$ и ${{a}_{ij}}$ возникает одна и та же проблема:
Какой индекс за что отвечает? Сначала идёт номер строки, затем — столбца? Или наоборот?
При чтении лекций и учебников ответ будет казаться очевидным. Но когда на экзамене перед вами — только листик с задачей, можно переволноваться и внезапно запутаться.
Поэтому давайте разберёмся с этим вопросом раз и навсегда. Для начала вспомним обычную систему координат из школьного курса математики:
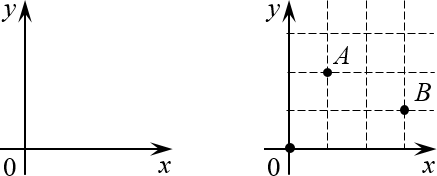
Помните её? У неё есть начало координат (точка $O=left( 0;0 right)$) оси $x$и $y$, а каждая точка на плоскости однозначно определяется по координатам: $A=left( 1;2 right)$, $B=left( 3;1 right)$ и т.д.
А теперь давайте возьмём эту конструкцию и поставим её рядом с матрицей так, чтобы начало координат находилось в левом верхнем углу. Почему именно там? Да потому что открывая книгу, мы начинаем читать именно с левого верхнего угла страницы — запомнить это легче лёгкого.
Но куда направить оси? Мы направим их так, чтобы вся наша виртуальная «страница» была охвачена этими осями. Правда, для этого придётся повернуть нашу систему координат. Единственно возможный вариант такого расположения:
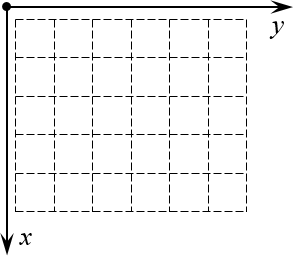
Теперь всякая клетка матрицы имеет однозначные координаты $x$ и $y$. Например запись ${{a}_{24}}$ означает, что мы обращаемся к элементу с координатами $x=2$ и $y=4$. Размеры матрицы тоже однозначно задаются парой чисел:
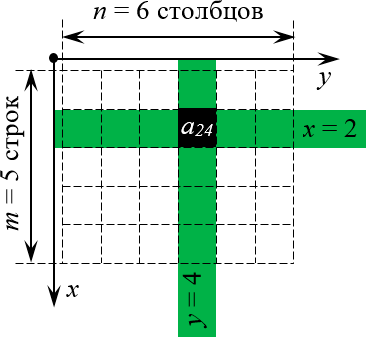
Просто всмотритесь в эту картинку внимательно. Поиграйтесь с координатами (особенно когда будете работать с настоящими матрицами и определителями) — и очень скоро поймёте, что даже в самых сложных теоремах и определениях вы прекрасно понимаете, о чём идёт речь.
Разобрались? Что ж, переходим к первому шагу просветления — геометрическому определению определителя.:)
Геометрическое определение
Прежде всего хотел бы отметить, что определитель существует только для квадратных матриц вида $left[ ntimes n right]$. Определитель — это число, которое cчитается по определённым правилам и является одной из характеристик этой матрицы (есть другие характеристики: ранг, собственные вектора, но об этом в других уроках).
Ну и что это за характеристика? Что он означает? Всё просто:
Определитель квадратной матрицы $A=left[ ntimes n right]$ — это объём $n$-мерного параллелепипеда, который образуется, если рассмотреть строки матрицы в качестве векторов, образующих рёбра этого параллелепипеда.
Например, определитель матрицы размера 2×2 — это просто площадь параллелограмма, а для матрицы 3×3 это уже объём 3-мерного параллелепипеда — того самого, который так бесит всех старшеклассников на уроках стереометрии.
На первый взгляд это определение может показаться совершенно неадекватным. Но давайте не будем спешить с выводами — глянем на примеры. На самом деле всё элементарно, Ватсон:
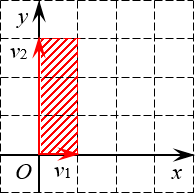
Задача. Найдите определители матриц:
[left| begin{matrix} 1 & 0 \ 0 & 3 \end{matrix} right|quad left| begin{matrix} 1 & -1 \ 2 & 2 \end{matrix} right|quad left| begin{matrix}2 & 0 & 0 \ 1 & 3 & 0 \ 1 & 1 & 4 \end{matrix} right|]
Решение. Первые два определителя имеют размер 2×2. Значит, это просто площади параллелограммов. Начертим их и посчитаем площадь.
Первый параллелограмм построен на векторах ${{v}_{1}}=left( 1;0 right)$ и ${{v}_{2}}=left( 0;3 right)$:
Определитель 2×2 — это площадь параллелограмма Очевидно, это не просто параллелограмм, а вполне себе прямоугольник. Его площадь равна
[S=1cdot 3=3]
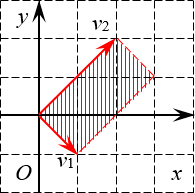
Второй параллелограмм построен на векторах ${{v}_{1}}=left( 1;-1 right)$ и ${{v}_{2}}=left( 2;2 right)$. Ну и что с того? Это тоже прямоугольник:
Ещё один определитель 2×2 Стороны этого прямоугольника (по сути — длины векторов) легко считаются по теореме Пифагора:
[begin{align} & left| {{v}_{1}} right|=sqrt{{{1}^{2}}+{{left( -1 right)}^{2}}}=sqrt{2}; \ & left| {{v}_{2}} right|=sqrt{{{2}^{2}}+{{2}^{2}}}=sqrt{8}=2sqrt{2}; \ & S=left| {{v}_{1}} right|cdot left| {{v}_{2}} right|=sqrt{2}cdot 2sqrt{2}=4. \end{align}]
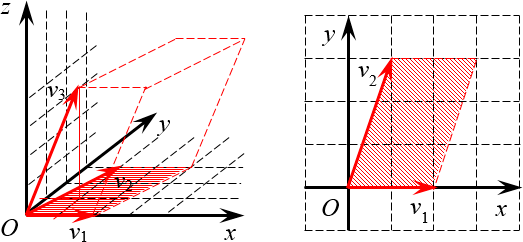
Осталось разобраться с последним определителем — там уже матрица 3×3. Придётся вспоминать стереометрию:
Определитель 3×3 — это объём параллелепипеда Выглядит мозговыносяще, но по факту достаточно вспомнить формулу объёма параллелепипеда:
[V=Scdot h]
где $S$ — площадь основания (в нашем случае это площадь параллелограмма на плоскости $OXY$), $h$ — высота, проведённая к этому основанию (по сути, $z$-координата вектора ${{v}_{3}}$).
Площадь параллелограмма (мы начертили его отдельно) тоже считается легко:
[begin{align} & S=2cdot 3=6; \ & V=Scdot h=6cdot 4=24. \end{align}]
Вот и всё! Записываем ответы.
Ответ: 3; 4; 24.
Небольшое замечание по поводу системы обозначений. Кому-то наверняка не понравится, что я игнорирую «стрелочки» над векторами. Якобы так можно спутать вектор с точкой или ещё с чем.
Но давайте серьёзно: мы с вами уже взрослые мальчики и девочки, поэтому из контекста прекрасно понимаем, когда речь идёт о векторе, а когда — о точке. Стрелки лишь засоряют повествование, и без того под завязку напичканное математическими формулами.
И ещё. В принципе, ничто не мешает рассмотреть и определитель матрицы 1×1 — такая матрица представляет собой просто одну клетку, а число, записанное в этой клетке, и будет определителем. Но тут есть важное замечание:
В отличие от классического объёма, определитель даст нам так называемый «ориентированный объём», т.е. объём с учётом последовательности рассмотрения векторов-строк.
И если вы хотите получить объём в классическом смысле этого слова, придётся взять модуль определителя, но сейчас не стоит париться об этом — всё равно через несколько секунд мы научимся считать любой определитель с любыми знаками, размерами и т.д.:)
Алгебраическое определение
При всей красоте и наглядности геометрического подхода у него есть серьёзный недостаток: он ничего не говорит нам о том, как этот самый определитель считать.
Поэтому сейчас мы разберём альтернативное определение — алгебраическое. Для этого нам потребуется краткая теоретическая подготовка, зато на выходе мы получим инструмент, позволяющий считать в матрицах что и как угодно.
Правда, там появится новая проблема… но обо всём по порядку.
Перестановки и инверсии
Давайте выпишем в строчку числа от 1 до $n$. Получится что-то типа этого:
[1;2;3;4;5;…;n-1;n]
Теперь (чисто по приколу) поменяем парочку чисел местами. Можно поменять соседние:
[1;3;2;4;5;…;n-1;n]
А можно — не особо соседние:
[n;2;3;4;5;…;n-1;1]
И знаете, что? А ничего! В алгебре эта хрень называется перестановкой. И у неё есть куча свойств.
Определение. Перестановка длины $n$ — строка из $n$ различных чисел, записанных в любой последовательности. Обычно рассматриваются первые $n$ натуральных чисел (т.е. как раз числа 1, 2, …, $n$), а затем их перемешивают для получения нужной перестановки.
Обозначаются перестановки так же, как и векторы — просто буквой и последовательным перечислением своих элементов в скобках. Например: $p=left( 1;3;2 right)$ или $p=left( 2;5;1;4;3 right)$. Буква может быть любой, но пусть будет $p$.:)
Далее для простоты изложения будем работать с перестановками длины 5 — они уже достаточно серьёзны для наблюдения всяких подозрительных эффектов, но ещё не настолько суровы для неокрепшего мозга, как перестановки длины 6 и более. Вот примеры таких перестановок:
[begin{align} & {{p}_{1}}=left( 1;2;3;4;5 right) \ & {{p}_{2}}=left( 1;3;2;5;4 right) \ & {{p}_{3}}=left( 5;4;3;2;1 right) \end{align}]
Естественно, перестановку длины $n$ можно рассматривать как функцию, которая определена на множестве $left{ 1;2;…;n right}$ и биективно отображает это множество на себя же. Возвращаясь к только что записанным перестановкам ${{p}_{1}}$, ${{p}_{2}}$ и ${{p}_{3}}$, мы вполне законно можем написать:
[{{p}_{1}}left( 1 right)=1;{{p}_{2}}left( 3 right)=2;{{p}_{3}}left( 2 right)=4;]
Количество различных перестановок длины $n$ всегда ограничено и равно $n!$ — это легко доказуемый факт из комбинаторики. Например, если мы захотим выписать все перестановки длины 5, то мы весьма заколебёмся, поскольку таких перестановок будет
[n!=5!=1cdot 2cdot 3cdot 4cdot 5=120]
Одной из ключевых характеристик всякой перестановки является количество инверсий в ней.
Определение. Инверсия в перестановке $p=left( {{a}_{1}};{{a}_{2}};…;{{a}_{n}} right)$ — всякая пара $left( {{a}_{i}};{{a}_{j}} right)$ такая, что $i lt j$, но ${{a}_{i}} gt {{a}_{j}}$. Проще говоря, инверсия — это когда большее число стоит левее меньшего (не обязательно соседнего).
Мы будем обозначать через $Nleft( p right)$ количество инверсий в перестановке $p$, но будьте готовы встретиться и с другими обозначениями в разных учебниках и у разных авторов — единых стандартов тут нет. Тема инверсий весьма обширна, и ей будет посвящён отдельный урок. Сейчас же наша задача — просто научиться считать их в реальных задачах.
Например, посчитаем количество инверсий в перестановке $p=left( 1;4;5;3;2 right)$:
[left( 4;3 right);left( 4;2 right);left( 5;3 right);left( 5;2 right);left( 3;2 right).]
Таким образом, $Nleft( p right)=5$. Как видите, ничего страшного в этом нет. Сразу скажу: дальше нас будет интересовать не столько само число $Nleft( p right)$, сколько его чётность/ нечётность. И тут мы плавно переходим к ключевому термину сегодняшнего урока.
Что такое определитель
Пусть дана квадратная матрица $A=left[ ntimes n right]$. Тогда:
Определение. Определитель матрицы $A=left[ ntimes n right]$ — это алгебраическая сумма $n!$ слагаемых, составленных следующим образом. Каждое слагаемое — это произведение $n$ элементов матрицы, взятых по одному из каждой строки и каждого столбца, умноженное на (−1) в степени количество инверсий:
[left| A right|=sumlimits_{n!}{{{left( -1 right)}^{Nleft( p right)}}cdot {{a}_{1;pleft( 1 right)}}cdot {{a}_{2;pleft( 2 right)}}cdot …cdot {{a}_{n;pleft( n right)}}}]
Принципиальным моментом при выборе множителей для каждого слагаемого в определителе является тот факт, что никакие два множителя не стоят в одной строчке или в одном столбце.
Благодаря этому можно без ограничения общности считать, что индексы $i$ множителей ${{a}_{i;j}}$ «пробегают» значения 1, …, $n$, а индексы $j$ являются некоторой перестановкой от первых:
[j=pleft( i right),quad i=1,2,…,n]
А когда есть перестановка $p$, мы легко посчитаем инверсии $Nleft( p right)$ — и очередное слагаемое определителя готово.
Естественно, никто не запрещает поменять местами множители в каком-либо слагаемом (или во всех сразу — чего мелочиться-то?), и тогда первые индексы тоже будут представлять собой некоторую перестановку. Но в итоге ничего не поменяется: суммарное количество инверсий в индексах $i$ и $j$ сохраняет чётность при подобных извращениях, что вполне соответствует старому-доброму правилу:
От перестановки множителей произведение чисел не меняется.
Вот только не надо приплетать это правило к умножению матриц — в отличие от умножения чисел, оно не коммутативно. Но это я отвлёкся.:)
Матрица 2×2
Вообще-то можно рассмотреть и матрицу 1×1 — это будет одна клетка, и её определитель, как нетрудно догадаться, равен числу, записанному в этой клетке. Ничего интересного.
Поэтому давайте рассмотрим квадратную матрицу размером 2×2:
[left[ begin{matrix} {{a}_{11}} & {{a}_{12}} \ {{a}_{21}} & {{a}_{22}} \end{matrix} right]]
Поскольку количество строк в ней $n=2$, то определитель будет содержать $n!=2!=1cdot 2=2$ слагаемых. Выпишем их:
[begin{align} & {{left( -1 right)}^{Nleft( 1;2 right)}}cdot {{a}_{11}}cdot {{a}_{22}}={{left( -1 right)}^{0}}cdot {{a}_{11}}cdot {{a}_{22}}={{a}_{11}}{{a}_{22}}; \ & {{left( -1 right)}^{Nleft( 2;1 right)}}cdot {{a}_{12}}cdot {{a}_{21}}={{left( -1 right)}^{1}}cdot {{a}_{12}}cdot {{a}_{21}}={{a}_{12}}{{a}_{21}}. \end{align}]
Очевидно, что в перестановке $left( 1;2 right)$, состоящей из двух элементов, нет инверсий, поэтому $Nleft( 1;2 right)=0$. А вот в перестановке $left( 2;1 right)$ одна инверсия имеется (собственно, 2 < 1), поэтому $Nleft( 2;1 right)=1.$
Итого универсальная формула вычисления определителя для матрицы 2×2 выглядит так:
[left| begin{matrix} {{a}_{11}} & {{a}_{12}} \ {{a}_{21}} & {{a}_{22}} \end{matrix} right|={{a}_{11}}{{a}_{22}}-{{a}_{12}}{{a}_{21}}]
Графически это можно представить как произведение элементов, стоящих на главной диагонали, минус произведение элементов на побочной:
Рассмотрим пару примеров:
Задача. Вычислите определитель:
[left| begin{matrix} 5 & 6 \ 8 & 9 \end{matrix} right|;quad left| begin{matrix} 7 & 12 \ 14 & 1 \end{matrix} right|.]
Решение. Всё считается в одну строчку. Первая матрица:
[5cdot 9-8cdot 6=45-48=-3]
И вторая:
[7cdot 1-14cdot 12=7-168=-161]
Ответ: −3; −161.
Впрочем, это было слишком просто. Давайте рассмотрим матрицы 3×3 — там уже интересно.
Матрица 3×3
Теперь рассмотрим квадратную матрицу размера 3×3:
[left[ begin{matrix} {{a}_{11}} & {{a}_{12}} & {{a}_{13}} \ {{a}_{21}} & {{a}_{22}} & {{a}_{23}} \ {{a}_{31}} & {{a}_{32}} & {{a}_{33}} \end{matrix} right]]
При вычислении её определителя мы получим $3!=1cdot 2cdot 3=6$ слагаемых — ещё не слишком много для паники, но уже достаточно, чтобы начать искать какие-то закономерности. Для начала выпишем все перестановки из трёх элементов и посчитаем инверсии в каждой из них:
[begin{align} & {{p}_{1}}=left( 1;2;3 right)Rightarrow Nleft( {{p}_{1}} right)=Nleft( 1;2;3 right)=0; \ & {{p}_{2}}=left( 1;3;2 right)Rightarrow Nleft( {{p}_{2}} right)=Nleft( 1;3;2 right)=1; \ & {{p}_{3}}=left( 2;1;3 right)Rightarrow Nleft( {{p}_{3}} right)=Nleft( 2;1;3 right)=1; \ & {{p}_{4}}=left( 2;3;1 right)Rightarrow Nleft( {{p}_{4}} right)=Nleft( 2;3;1 right)=2; \ & {{p}_{5}}=left( 3;1;2 right)Rightarrow Nleft( {{p}_{5}} right)=Nleft( 3;1;2 right)=2; \ & {{p}_{6}}=left( 3;2;1 right)Rightarrow Nleft( {{p}_{6}} right)=Nleft( 3;2;1 right)=3. \end{align}]
Как и предполагалось, всего выписано 6 перестановок ${{p}_{1}}$, … ${{p}_{6}}$ (естественно, можно было бы выписать их в другой последовательности — суть от этого не изменится), а количество инверсий в них меняется от 0 до 3.
В общем, у нас будет три слагаемых с «плюсом» (там, где $Nleft( p right)$ — чётное) и ещё три с «минусом». А в целом определитель будет считаться по формуле:
[left| begin{matrix} {{a}_{11}} & {{a}_{12}} & {{a}_{13}} \ {{a}_{21}} & {{a}_{22}} & {{a}_{23}} \ {{a}_{31}} & {{a}_{32}} & {{a}_{33}} \end{matrix} right|=begin{matrix} {{a}_{11}}{{a}_{22}}{{a}_{33}}+{{a}_{12}}{{a}_{23}}{{a}_{31}}+{{a}_{13}}{{a}_{21}}{{a}_{32}}- \ -{{a}_{13}}{{a}_{22}}{{a}_{31}}-{{a}_{12}}{{a}_{21}}{{a}_{33}}-{{a}_{11}}{{a}_{23}}{{a}_{32}} \end{matrix}]
Вот только не надо сейчас садиться и яростно зубрить все эти индексы! Вместо непонятных цифр лучше запомните следующее мнемоническое правило:
Правило треугольника. Для нахождения определителя матрицы 3×3 нужно сложить три произведения элементов, стоящих на главной диагонали и в вершинах равнобедренных треугольников со стороной, параллельной этой диагонали, а затем вычесть такие же три произведения, но на побочной диагонали. Схематически это выглядит так:
Определитель матрицы 3×3: правило треугольников
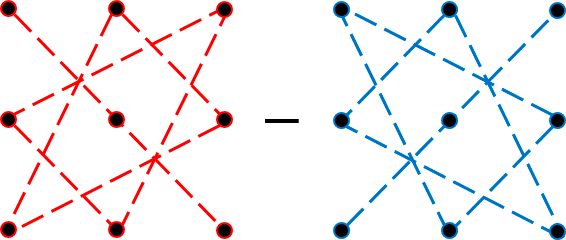
Именно эти треугольники (или пентаграммы — кому как больше нравится) любят рисовать во всяких учебниках и методичках по алгебре. Впрочем, не будем о грустном. Давайте лучше посчитаем один такой определитель — для разминки перед настоящей жестью.:)
Задача. Вычислите определитель:
[left| begin{matrix} 1 & 2 & 3 \ 4 & 5 & 6 \ 7 & 8 & 1 \end{matrix} right|]
Решение. Работаем по правилу треугольников. Сначала посчитаем три слагаемых, составленных из элементов на главной диагонали и параллельно ей:
[begin{align} & 1cdot 5cdot 1+2cdot 6cdot 7+3cdot 4cdot 8= \ & =5+84+96=185 \end{align}]
Теперь разбираемся с побочной диагональю:
[begin{align} & 3cdot 5cdot 7+2cdot 4cdot 1+1cdot 6cdot 8= \ & =105+8+48=161 \end{align}]
Осталось лишь вычесть из первого числа второе — и мы получим ответ:
[185-161=24]
Вот и всё!
Ответ: 24.
Тем не менее, определители матриц 3×3 — это ещё не вершина мастерства. Самое интересное ждёт нас дальше.:)
Общая схема вычисления определителей
Как мы знаем, с ростом размерности матрицы $n$ количество слагаемых в определителе составляет $n!$ и быстро растёт. Всё-таки факториал — это вам не хрен собачий довольно быстро растущая функция.
Уже для матриц 4×4 считать определители напролом (т.е. через перестановки) становится как-то не оч. Про 5×5 и более вообще молчу. Поэтому к делу подключаются некоторые свойства определителя, но для их понимания нужна небольшая теоретическая подготовка.
Готовы? Поехали!
Что такое минор матрицы
Пусть дана произвольная матрица $A=left[ mtimes n right]$. Заметьте: не обязательно квадратная. В отличие от определителей, миноры — это такие няшки, которые существуют не только в суровых квадратных матрицах. Выберем в этой матрице несколько (например, $k$) строк и столбцов, причём $1le kle m$ и $1le kle n$. Тогда:
Определение. Минор порядка $k$ — определитель квадратной матрицы, возникающей на пересечении выбранных $k$ столбцов и строк. Также минором мы будем называть и саму эту новую матрицу.
Обозначается такой минор ${{M}_{k}}$. Естественно, у одной матрицы может быть целая куча миноров порядка $k$. Вот пример минора порядка 2 для матрицы $left[ 5times 6 right]$:
Выбор $k = 2$ столбцов и строк для формирования минора
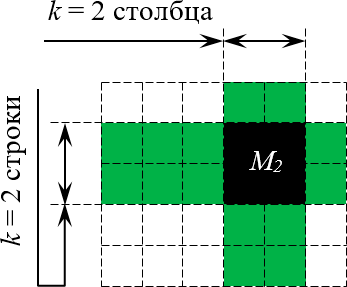
Совершенно необязательно, чтобы выбранные строки и столбцы стояли рядом, как в рассмотренном примере. Главное, чтобы количество выбранных строк и столбцов было одинаковым (это и есть число $k$).
Есть и другое определение. Возможно, кому-то оно больше придётся по душе:
Определение. Пусть дана прямоугольная матрица $A=left[ mtimes n right]$. Если после вычеркивания в ней одного или нескольких столбцов и одной или нескольких строк образуется квадратная матрица размера $left[ ktimes k right]$, то её определитель — это и есть минор ${{M}_{k}}$. Саму матрицу мы тоже иногда будем называть минором — это будет ясно из контекста.
Как говорил мой кот, иногда лучше один раз навернуться с 11-го этажа есть корм, чем мяукать, сидя на балконе.
Пример. Пусть дана матрица
[A=left[ begin{matrix} begin{matrix} 1 \ 2 \ 3 \end{matrix} & begin{matrix} 7 \ 4 \ 0 \end{matrix} & begin{matrix} 9 \ 5 \ 6 \end{matrix} & begin{matrix} 0 \ 3 \ 1 \end{matrix} \end{matrix} right]]
Выбирая строку 1 и столбец 2, получаем минор первого порядка:
[{{M}_{1}}=left| 7 right|=7]
Выбирая строки 2, 3 и столбцы 3, 4, получаем минор второго порядка:
[{{M}_{2}}=left| begin{matrix} 5 & 3 \ 6 & 1 \end{matrix} right|=5-18=-13]
А если выбрать все три строки, а также столбцы 1, 2, 4, будет минор третьего порядка:
[{{M}_{3}}=left| begin{matrix} 1 & 7 & 0 \ 2 & 4 & 3 \ 3 & 0 & 1 \end{matrix} right|]
Считать этот определитель мне уже в лом. Но он равен 53.:)
Читателю не составит труда найти и другие миноры порядков 1, 2 или 3. Поэтому идём дальше.
Алгебраические дополнения
«Ну ok, и что дают нам эти миньоны миноры?» — наверняка спросите вы. Сами по себе — ничего. Но в квадратных матрицах у каждого минора появляется «компаньон» — дополнительный минор, а также алгебраическое дополнение. И вместе эти два ушлёпка позволят нам щёлкать определители как орешки.
Определение. Пусть дана квадратная матрица $A=left[ ntimes n right]$, в которой выбран минор ${{M}_{k}}$. Тогда дополнительный минор для минора ${{M}_{k}}$ — это кусок исходной матрицы $A$, который останется при вычёркивании всех строк и столбцов, задействованных при составлении минора ${{M}_{k}}$:
Дополнительный минор к минору ${{M}_{2}}$ Уточним один момент: дополнительный минор — это не просто «кусок матрицы», а определитель этого куска.
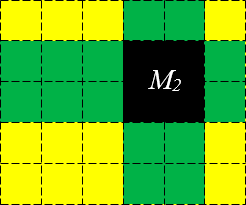
Обозначаются дополнительные миноры с помощью «звёздочки»: $M_{k}^{*}$:
[M_{k}^{*}=left| Anabla {{M}_{k}} right|]
где операция $Anabla {{M}_{k}}$ буквально означает «вычеркнуть из $A$ строки и столбцы, входящие в ${{M}_{k}}$». Эта операция не является общепринятой в математике — я её сам только что придумал для красоты повествования.:)
Дополнительные миноры редко используются сами по себе. Они являются частью более сложной конструкции — алгебраического дополнения.
Определение. Алгебраическое дополнение минора ${{M}_{k}}$ — это дополнительный минор $M_{k}^{*}$, умноженный на величину ${{left( -1 right)}^{S}}$, где $S$ — сумма номеров всех строк и столбцов, задействованных в исходном миноре ${{M}_{k}}$.
Как правило, алгебраическое дополнение минора ${{M}_{k}}$ обозначается через ${{A}_{k}}$. Поэтому:
[{{A}_{k}}={{left( -1 right)}^{S}}cdot M_{k}^{*}]
Сложно? На первый взгляд — да. Но это не точно. Потому что на самом деле всё легко. Рассмотрим пример:
Пример. Дана матрица 4×4:
[A=left[ begin{matrix} 1 & 2 & 3 & 4 \ 5 & 6 & 7 & 8 \ 9 & 10 & 11 & 12 \ 13 & 14 & 15 & 16 \end{matrix} right]]
Выберем минор второго порядка
[{{M}_{2}}=left| begin{matrix} 3 & 4 \ 15 & 16 \end{matrix} right|]
Капитан Очевидность как бы намекает нам, что при составлении этого минора были задействованы строки 1 и 4, а также столбцы 3 и 4. Вычёркиваем их — получим дополнительный минор:
[M_{2}^{*}=left| begin{matrix} 5 & 6 \ 9 & 10 \end{matrix} right|=50-54=-4]
Осталось найти число $S$ и получить алгебраическое дополнение. Поскольку мы знаем номера задействованных строк (1 и 4) и столбцов (3 и 4), всё просто:
[begin{align} & S=1+4+3+4=12; \ & {{A}_{2}}={{left( -1 right)}^{S}}cdot M_{2}^{*}={{left( -1 right)}^{12}}cdot left( -4 right)=-4end{align}]
Ответ: ${{A}_{2}}=-4$
Вот и всё! По сути, всё различие между дополнительным минором и алгебраическим дополнением — только в минусе спереди, да и то не всегда.
Наша задача сейчас — научиться быстро считать алгебраические дополнения, потому что они являются составной частью «Теоремы, Которую Нельзя Называть». Но мы всё же назовём. Встречайте:
Теорема Лапласа
И вот мы пришли к тому, зачем, собственно, все эти миноры и алгебраические дополнения были нужны.
Теорема Лапласа о разложении определителя. Пусть в матрице размера $left[ ntimes n right]$ выбрано $k$ строк (столбцов), причём $1le kle n-1$. Тогда определитель этой матрицы равен сумме всех произведений миноров порядка $k$, содержащихся в выбранных строках (столбцах), на их алгебраические дополнения:
[left| A right|=sum{{{M}_{k}}cdot {{A}_{k}}}]
Причём таких слагаемых будет ровно $C_{n}^{k}$.
Ладно, ладно: про $C_{n}^{k}$ — это я уже понтуюсь, в оригинальной теореме Лапласа ничего такого не было. Но комбинаторику никто не отменял, и буквально беглый взгляд на условие позволит вам самостоятельно убедиться, что слагаемых будет именно столько.:)
Мы не будем её доказывать, хоть это и не представляет особой трудности — все выкладки сводятся к старым-добрым перестановкам и чётности/ нечётности инверсий. Тем не менее, доказательство будет представлено в отдельном параграфе, а сегодня у нас сугубо практический урок.
Поэтому переходим к частному случаю этой теоремы, когда миноры представляют собой отдельные клетки матрицы.
Разложение определителя по строке и столбцу
То, о чём сейчас пойдёт речь — как раз и есть основной инструмент работы с определителями, ради которого затевались вся эта дичь с перестановками, минорами и алгебраическими дополнениями.
Читайте и наслаждайтесь:
Следствие из Теоремы Лапласа (разложение определителя по строке/столбцу). Пусть в матрице размера $left[ ntimes n right]$ выбрана одна строка. Минорами в этой строке будут $n$ отдельных клеток:
[{{M}_{1}}={{a}_{ij}},quad j=1,…,n]
Дополнительные миноры тоже легко считаются: просто берём исходную матрицу и вычёркиваем строку и столбец, содержащие ${{a}_{ij}}$. Назовём такие миноры $M_{ij}^{*}$.
Для алгебраического дополнения ещё нужно число $S$, но в случае с минором порядка 1 это просто сумма «координат» клетки ${{a}_{ij}}$:
[S=i+j]
И тогда исходный определитель можно расписать через ${{a}_{ij}}$ и $M_{ij}^{*}$ согласно теореме Лапласа:
[left| A right|=sumlimits_{j=1}^{n}{{{a}_{ij}}cdot {{left( -1 right)}^{i+j}}cdot {{M}_{ij}}}]
Это и есть формула разложения определителя по строке. Но то же верно и для столбцов.
Из этого следствия можно сразу сформулировать несколько выводов:
- Эта схема одинаково хорошо работает как для строк, так и для столбцов. На самом деле чаще всего разложение будет идти именно по столбцам, нежели по строкам.
- Количество слагаемых в разложении всегда ровно $n$. Это существенно меньше $C_{n}^{k}$ и уж тем более $n!$.
- Вместо одного определителя $left[ ntimes n right]$ придётся считать несколько определителей размера на единицу меньше: $left[ left( n-1 right)times left( n-1 right) right]$.
Последний факт особенно важен. Например, вместо зверского определителя 4×4 теперь достаточно будет посчитать несколько определителей 3×3 — с ними мы уж как-нибудь справимся.:)
Что ж, попробуем посчитать одну такую задачку?
Задача. Найдите определитель:
[left| begin{matrix} 1 & 2 & 3 \ 4 & 5 & 6 \ 7 & 8 & 9 \end{matrix} right|]
Решение. Разложим этот определитель по первой строке:
[begin{align} left| A right|=1cdot {{left( -1 right)}^{1+1}}cdot left| begin{matrix} 5 & 6 \ 8 & 9 \end{matrix} right|+ & \ 2cdot {{left( -1 right)}^{1+2}}cdot left| begin{matrix} 4 & 6 \ 7 & 9 \end{matrix} right|+ & \ 3cdot {{left( -1 right)}^{1+3}}cdot left| begin{matrix} 4 & 5 \ 7 & 8 \end{matrix} right|= & \end{align}]
[begin{align} & =1cdot left( 45-48 right)-2cdot left( 36-42 right)+3cdot left( 32-35 right)= \ & =1cdot left( -3 right)-2cdot left( -6 right)+3cdot left( -3 right)=0. \end{align}]
Ответ: 0.
Задача. Найдите определитель:
[left| begin{matrix} 0 & 1 & 1 & 0 \ 1 & 0 & 1 & 1 \ 1 & 1 & 0 & 1 \ 1 & 1 & 1 & 0 \end{matrix} right|]
Решение. Для разнообразия давайте в этот раз работать со столбцами. Например, в последнем столбце присутствуют сразу два нуля — очевидно, это значительно сократит вычисления. Сейчас увидите почему.
Итак, раскладываем определитель по четвёртому столбцу:
[begin{align} left| begin{matrix} 0 & 1 & 1 & 0 \ 1 & 0 & 1 & 1 \ 1 & 1 & 0 & 1 \ 1 & 1 & 1 & 0 \end{matrix} right|=0cdot {{left( -1 right)}^{1+4}}cdot left| begin{matrix} 1 & 0 & 1 \ 1 & 1 & 0 \ 1 & 1 & 1 \end{matrix} right|+ & \ +1cdot {{left( -1 right)}^{2+4}}cdot left| begin{matrix} 0 & 1 & 1 \ 1 & 1 & 0 \ 1 & 1 & 1 \end{matrix} right|+ & \ +1cdot {{left( -1 right)}^{3+4}}cdot left| begin{matrix} 0 & 1 & 1 \ 1 & 0 & 1 \ 1 & 1 & 1 \end{matrix} right|+ & \ +0cdot {{left( -1 right)}^{4+4}}cdot left| begin{matrix} 0 & 1 & 1 \ 1 & 0 & 1 \ 1 & 1 & 0 \end{matrix} right| & \end{align}]
И тут — о, чудо! — два слагаемых сразу улетают коту под хвост, поскольку в них есть множитель «0». Остаётся ещё два определителя 3×3, с которыми мы легко разберёмся:
[begin{align} & left| begin{matrix} 0 & 1 & 1 \ 1 & 1 & 0 \ 1 & 1 & 1 \end{matrix} right|=0+0+1-1-1-0=-1; \ & left| begin{matrix} 0 & 1 & 1 \ 1 & 0 & 1 \ 1 & 1 & 1 \end{matrix} right|=0+1+1-0-0-1=1. \end{align}]
Возвращаемся к исходнику и находим ответ:
[left| begin{matrix} 0 & 1 & 1 & 0 \ 1 & 0 & 1 & 1 \ 1 & 1 & 0 & 1 \ 1 & 1 & 1 & 0 \end{matrix} right|=1cdot left( -1 right)+left( -1 right)cdot 1=-2]
Ну вот и всё. И никаких 4! = 24 слагаемых считать не пришлось.:)
Ответ: −2
Основные свойства определителя
В последней задаче мы видели, как наличие нулей в строках (столбцах) матрицы резко упрощает разложение определителя и вообще все вычисления. Возникает естественный вопрос: а нельзя ли сделать так, чтобы эти нули появились даже в той матрице, где их изначально не было?
Ответ однозначен: можно. И здесь нам на помощь приходят свойства определителя:
- Если поменять две строчки (столбца) местами, определитель поменяет знак;
- Если одну строку (столбец) умножить на число $k$, то весь определитель тоже умножится на число $k$;
- Если взять одну строку и прибавить (вычесть) её сколько угодно раз из другой, определитель не изменится;
- Если две строки определителя одинаковы, либо пропорциональны, либо одна из строк заполнена нулями, то весь определитель равен нулю;
- Все указанные выше свойства верны и для столбцов.
- При транспонировании матрицы определитель не меняется;
- Определитель произведения матриц равен произведению определителей.
Особую ценность представляет третье свойство: мы можем вычитать из одной строки (столбца) другую до тех пор, пока в нужных местах не появятся нули.
Чаще всего расчёты сводится к тому, чтобы «обнулить» весь столбец везде, кроме одного элемента, а затем разложить определитель по этому столбцу, получив матрицу размером на 1 меньше.
Давайте посмотрим, как это работает на практике:
Задача. Найдите определитель:
[left| begin{matrix} 1 & 2 & 3 & 4 \ 4 & 1 & 2 & 3 \ 3 & 4 & 1 & 2 \ 2 & 3 & 4 & 1 \end{matrix} right|]
Решение. Нулей тут как бы вообще не наблюдается, поэтому можно «долбить» по любой строке или столбцу — объём вычислений будет примерно одинаковым. Давайте не будем мелочиться и «обнулим» первый столбец: в нём уже есть клетка с единицей, поэтому просто возьмём первую строчку и вычтем её 4 раза из второй, 3 раза из третьей и 2 раза из последней.
В результате мы получим новую матрицу, но её определитель будет тем же:
[begin{matrix} left| begin{matrix} 1 & 2 & 3 & 4 \ 4 & 1 & 2 & 3 \ 3 & 4 & 1 & 2 \ 2 & 3 & 4 & 1 \end{matrix} right|begin{matrix} downarrow \ -4 \ -3 \ -2 \end{matrix}= \ =left| begin{matrix} 1 & 2 & 3 & 4 \ 4-4cdot 1 & 1-4cdot 2 & 2-4cdot 3 & 3-4cdot 4 \ 3-3cdot 1 & 4-3cdot 2 & 1-3cdot 3 & 2-3cdot 4 \ 2-2cdot 1 & 3-2cdot 2 & 4-2cdot 3 & 1-2cdot 4 \end{matrix} right|= \ =left| begin{matrix} 1 & 2 & 3 & 4 \ 0 & -7 & -10 & -13 \ 0 & -2 & -8 & -10 \ 0 & -1 & -2 & -7 \end{matrix} right| \end{matrix}]
Теперь с невозмутимостью Пятачка раскладываем этот определитель по первому столбцу:
[begin{matrix} 1cdot {{left( -1 right)}^{1+1}}cdot left| begin{matrix} -7 & -10 & -13 \ -2 & -8 & -10 \ -1 & -2 & -7 \end{matrix} right|+0cdot {{left( -1 right)}^{2+1}}cdot left| … right|+ \ +0cdot {{left( -1 right)}^{3+1}}cdot left| … right|+0cdot {{left( -1 right)}^{4+1}}cdot left| … right| \end{matrix}]
Понятно, что «выживет» только первое слагаемое — в остальных я даже определители не выписывал, поскольку они всё равно умножаются на ноль. Коэффициент перед определителем равен единице, т.е. его можно не записывать.
Зато можно вынести «минусы» из всех трёх строк определителя. По сути, мы трижды вынесли множитель (−1):
[left| begin{matrix} -7 & -10 & -13 \ -2 & -8 & -10 \ -1 & -2 & -7 \end{matrix} right|=cdot left| begin{matrix} 7 & 10 & 13 \ 2 & 8 & 10 \ 1 & 2 & 7 \end{matrix} right|]
Получили мелкий определитель 3×3, который уже можно посчитать по правилу треугольников. Но мы попробуем разложить и его по первому столбцу — благо в последней строчке гордо стоит единица:
[begin{align} & left( -1 right)cdot left| begin{matrix} 7 & 10 & 13 \ 2 & 8 & 10 \ 1 & 2 & 7 \end{matrix} right|begin{matrix} -7 \ -2 \ uparrow \end{matrix}=left( -1 right)cdot left| begin{matrix} 0 & -4 & -36 \ 0 & 4 & -4 \ 1 & 2 & 7 \end{matrix} right|= \ & =cdot left| begin{matrix} -4 & -36 \ 4 & -4 \end{matrix} right|=left( -1 right)cdot left| begin{matrix} -4 & -36 \ 4 & -4 \end{matrix} right| \end{align}]
Можно, конечно, ещё поприкалываться и разложить матрицу 2×2 по строке (столбцу), но мы же с вами адекватны, поэтому просто посчитаем ответ:
[left( -1 right)cdot left| begin{matrix} -4 & -36 \ 4 & -4 \end{matrix} right|=left( -1 right)cdot left( 16+144 right)=-160]
Вот так и разбиваются мечты. Всего-то −160 в ответе.:)
Ответ: −160.
Парочка замечаний перед тем, как мы перейдём к последней задаче:
- Исходная матрица была симметрична относительно побочной диагонали. Все миноры в разложении тоже симметричны относительно той же побочной диагонали.
- Строго говоря, мы могли вообще ничего не раскладывать, а просто привести матрицу к верхнетреугольному виду, когда под главной диагональю стоят сплошные нули. Тогда (в точном соответствии с геометрической интерпретацией, кстати) определитель равен произведению ${{a}_{ii}}$ — чисел на главной диагонали.
Идём дальше. Последняя задача в сегодняшнем уроке.
Задача. Найдите определитель:
[left| begin{matrix} 1 & 1 & 1 & 1 \ 2 & 4 & 8 & 16 \ 3 & 9 & 27 & 81 \ 5 & 25 & 125 & 625 \end{matrix} right|]
Решение. Ну, тут первая строка прямо-таки напрашивается на «обнуление». Берём первый столбец и вычитаем ровно один раз из всех остальных:
[begin{align} & left| begin{matrix} 1 & 1 & 1 & 1 \ 2 & 4 & 8 & 16 \ 3 & 9 & 27 & 81 \ 5 & 25 & 125 & 625 \end{matrix} right|= \ & =left| begin{matrix} 1 & 1-1 & 1-1 & 1-1 \ 2 & 4-2 & 8-2 & 16-2 \ 3 & 9-3 & 27-3 & 81-3 \ 5 & 25-5 & 125-5 & 625-5 \end{matrix} right|= \ & =left| begin{matrix} 1 & 0 & 0 & 0 \ 2 & 2 & 6 & 14 \ 3 & 6 & 24 & 78 \ 5 & 20 & 120 & 620 \end{matrix} right| \end{align}]
Раскладываем по первой строке, а затем выносим общие множители из оставшихся строк:
[cdot left| begin{matrix} 2 & 6 & 14 \ 6 & 24 & 78 \ 20 & 120 & 620 \end{matrix} right|=cdot left| begin{matrix} 1 & 3 & 7 \ 1 & 4 & 13 \ 1 & 6 & 31 \end{matrix} right|]
Снова наблюдаем «красивые» числа, но уже в первом столбце — раскладываем определитель по нему:
[begin{align} & 240cdot left| begin{matrix} 1 & 3 & 7 \ 1 & 4 & 13 \ 1 & 6 & 31 \end{matrix} right|begin{matrix} downarrow \ -1 \ -1 \end{matrix}=240cdot left| begin{matrix} 1 & 3 & 7 \ 0 & 1 & 6 \ 0 & 3 & 24 \end{matrix} right|= \ & =240cdot {{left( -1 right)}^{1+1}}cdot left| begin{matrix} 1 & 6 \ 3 & 24 \end{matrix} right|= \ & =240cdot 1cdot left( 24-18 right)=1440 \end{align}]
Порядок. Задача решена.
Ответ: 1440
Всё. Хорош читать этот бред.:)
Смотрите также:
- Обратная матрица

- Умножение матриц

- Геометрическая вероятность
- Решение задач B12: №448—455
- Задачи на проценты: формула, упрощающая вычисления
- Задача B4 про три дороги — стандартная задача на движение
