На этой странице вы узнаете
- Как с помощью прямоугольника и скульптурного станка создать цилиндр?
- Причем тут тор и почему он без Локи?
Математика такая интересная наука, что голова идет кругом. А если я скажу, что в этом случае голова образует новую фигуру? Как это возможно — узнаем в статье.
Тела вращения
Мы прекрасно знаем, что такое вращение. Балерина, офисный стул, барабан стиральной машинки, планета Земля вращаются вокруг своей оси, как и много-много других примеров.
Проведем эксперимент.
Вырежем из бумаги прямоугольник и зафиксируем его на скульптурном станке. Скульптурный станок встречался нам во многих фильмах: обычно на нем лепят посуду и другие предметы из глины. Но главное, что нам нужно в станке, это его вращающаяся столешница.
Раскрутим наш прямоугольник с очень-очень высокой скоростью. Теперь прямоугольник будет казаться не плоской бумагой, а объемным цилиндром, в основании которого лежит круг с радиусом, равным длине этого прямоугольника.
Похожий оптический эффект можно заметить, если посмотреть на двигатель самолета или винт вертолета: в статичном положении мы видим лопасти, а при работе они превращаются в круги.
Таким же образом образуются любые тела вращения совершенно различных форм.
Наш эксперимент описывает тела вращения.
Тело вращения — тело в пространстве, которое возникает при вращении какой-то фигуры вокруг определенной оси.
Вращать можно любую фигуру и вокруг любой оси, тогда у нас будут получаться разные тела.
Поверхность и ось вращения
На примере выше мы видим вазу. Она состоит только из “оболочки” и полая внутри. В математике существует название и для этой оболочки. Называется она поверхностью вращения.
Поверхность вращения — граница тела вращения.
Иными словами, поверхность вращения является внешней оболочкой тела вращения и ограничивает его в пространстве. Как кожа у человека.
Ось, вокруг которой мы вращаем фигуру, называется осью вращения.
Ось вращения может по-разному располагаться относительно фигуры.
- Ось совпадает с одной из ее сторон.
Выше мы уже рассмотрели пример цилиндра и вазы. В их случае ось вращения лежит на одной из сторон фигуры, которую мы вращаем.
- Ось лежит внутри фигуры.
Например, ось может проходить через центр фигуры. Попробуем прокрутить овал вокруг его горизонтальной оси, проходящей через центр.
Мы получим эллипсоид. Эта фигура очень похожа на мяч для американского футбола.
- Ось лежит вне фигуры.
Например, если мы будем вращать круг относительно оси, лежащей за его пределами, то получим “кольцо”.
Такая фигура в математике называется тором.
Разумеется, когда в математике упоминается тор, имеет в виду не скандинавский бог.
Тор — тело вращения, которое получается при вращении круга вокруг оси, лежащей за его пределами.
Среди тел вращения в математике наиболее часто встречаются цилиндр, конус, шар, эллипсоид и тор. Подробнее про некоторые из них можно прочесть в статьях «Цилиндр», «Конус», «Шар».
Фактчек
- Тело вращения — тело в пространстве, которое возникает при вращении какой-то фигуры вокруг определенной оси.
- Поверхность вращения — граница тела вращения. Ось вращения — ось, вокруг которой мы вращаем фигуру.
- Ось, вокруг которой вращается фигура, может совпадать с одной из ее сторон, лежать внутри фигуры или за ее пределами. В каждом из этих случаев получаются различные тела вращения.
- В математике среди тел вращения наиболее часто встречаются цилиндр, конус, шар, эллипсоид и тор.
Проверь себя
Задание 1.
Что такое поверхность вращения?
- Все тело вращения.
- Граница тела вращения.
- Ось вращения.
- Основания тела вращения.
Задание 2.
Что такое ось вращения?
- Ось, вокруг которой вращается фигура, в результате чего получается тело вращения.
- Центральная ось любой фигуры.
- Ось, пересекающая плоскость фигуры перпендикулярно ей.
- Любая прямая, расположенная любым способом в пространстве относительно фигуры.
Задание 3.
Из каких фигур можно получить тело вращения?
- Только квадрат, прямоугольник и трапеция.
- Только круг или овал.
- Только параллелограмм.
- Из любой.
Задание 4.
Где может лежать ось вращения?
- Принадлежать стороне фигуры.
- Лежать “внутри” фигуры.
- Лежать за пределами фигуры.
- Все вышеперечисленное.
Ответ: 1. – 2 2. – 1 3. – 4 4. – 4
Вид движения, при котором одна точка механической системы, называемая центром вращения, остается неподвижной.
При вращательных движения абсолютно твёрдых тел все их точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей.
Линия в пространстве, относительно которой происходит вращение. Также деталь механизмов, которая служит для фиксации вращения в пространстве.
Свободные оси вращения тел
Если телу, которое находится во вращательном движении относительно произвольной оси, предоставить возможность самостоятельно обращаться, то в общем случае ориентация вращения в пространстве будет изменяться. Чтобы ось вращения твердого тела не меняла своей ориентации, на нее должны действовать определенные силы. Так, чтобы ось вращения тела (рис. 1) находилась в вертикальном направлении, на нее должна действовать пара сил, момент которой М=F1lМ = F_1l.

Рис. 1
При отсутствии действия момента пары сил ось вращения возвращалась бы так, как показано стрелкой на рисунке. Возможен случай, когда распределение масс относительно оси вращения таково, как на рис. 2.

Рис. 2
Если стержень, который соединяет массы m, перпендикулярен оси вращения ОО и массы находятся на разных расстояниях r1r_1 и r2r_2 от оси (рис. 2), то для предотвращения перемещения оси в пространстве на нее со стороны подшипников должны действовать компенсирующие силы F1F_1 и F2F_2 (случай, когда r1>r2r_1 > r_2). Заметим, что направление этих сил будет меняться в процессе вращения тела и в любой момент времени направление их будет параллельным стержню, соединяющая массы т. Сумма модулей сил F1F_1 и F2F_2 равна разности модулей центростремительных сил F1F_1 и F2F_2, т.е.
F1+F2=mω2(r1−r2){{F}_{1}}+{{F}_{2}}=m{{omega }^{2}}({{r}_{1}}-{{r}_{2}})
а их величины находят из соотношения l1F1=l2F2l_1F_1 = l_2F_2.
Ось, в отношении которой все центростремительные силы, действующие на отдельные части тела, взаимно уравновешиваются, называют свободной осью вращения.
При r1=r2r_1 = r_2 (рис. 2) ось ОО будет свободной.
Вращение тел через оси
Для любого тела существует три взаимно перпендикулярные оси, проходящие через его центр масс, которые и представляют собой свободные оси. Для однородного прямоугольного параллелепипеда это оси O1O1O_1O_1, O2O2O_2O_2 и O3O3O_3O_3, проведенные через центр массы перпендикулярно к боковым граням (рис. 3).

Рис. 3
Самый большой момент инерции у такого тела относительно оси O1O1O_1O_1 и наименьший относительно оси O3O3O_3O_3.
Теория и практика показывают, что вращение тела будет устойчивым только в отношении тех свободных осей, относительно которых момент инерции наибольший или наименьший.
Вращение тела будет неустойчивым относительно оси, для которой момент инерции имеет промежуточное значение. Если на нитке подвесить тонкий металлический стержень, диск или замкнутую цепочку и привести их в быстрое вращение, то они будут осуществлять вращательное движение вокруг свободных осей, относительно которых их моменты инерции наибольшие (рис. 4).
Тест по теме «Оси вращения»
Рис. 4

Образование поверхности вращения
Тела вращения — объёмные тела, возникающие при вращении плоской геометрической фигуры, ограниченной кривой, вокруг оси, лежащей в той же плоскости[1].
Примеры тел вращения[править | править код]
- Шар — образован полукругом, вращающимся вокруг диаметра разреза
- Цилиндр — образован прямоугольником, вращающимся вокруг одной из сторон
За площадь боковой поверхности цилиндра принимается площадь его развёртки:
.
- Конус — образован прямоугольным треугольником, вращающимся вокруг одного из катетов
За площадь боковой поверхности конуса принимается площадь его развертки:
.
Площадь полной поверхности конуса:
.
- Тор — образован окружностью, вращающейся вокруг прямой, не пересекающей его[2]
При вращении контуров фигур возникает поверхность вращения (например, сфера, образованная окружностью), в то время как при вращении заполненных контуров возникают тела (как шар, образованный кругом).
Объём тел вращения[править | править код]
Вращение вокруг оси x[править | править код]

Объём тела, образуемого вращением вокруг оси 

![[a;b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/68e776d74130a8890a814c1f4e74372a9110d2f9)



Вращение вокруг оси y[править | править код]

Объём тела, образуемого вращением вокруг оси 

Теорема Гульдина[править | править код]
Объём и площадь поверхности тел вращения можно также узнать при помощи теорем Гульдина-Паппа, которые связывают площадь или объём с центром масс фигуры.
- Первая теорема Гульдина-Паппа гласит:
Площадь поверхности, образуемой при вращении линии, лежащей в плоскости целиком по одну сторону от оси вращения, равна произведению длины линии на длину окружности, пробегаемой центром масс этой линии.
- Вторая теорема Гульдина-Паппа гласит:
Объём тела, образуемого при вращении фигуры, лежащей в плоскости целиком по одну сторону от оси вращения, равен произведению площади фигуры на длину окружности, пробегаемой центром масс этой фигуры.
Литература[править | править код]
А. В. Погорелов. «Геометрия. 10-11 класс» § 21.Тела вращения. — 2011
Примечания[править | править код]
- ↑ А. В. Погорелов. §21. Тела вращения // Геометрия. 10-11 класс. — 2011.
- ↑ Математика. Энциклопедия для детей том 11й ISBN 5-94623-072-7
Ссылки[править | править код]
Содержание:
Вращение твердого тела вокруг неподвижной точки:
Вращением твердого тела вокруг неподвижной точки называют такое движение, при котором одна точка тела остается все время неподвижной. Это вращение часто называют сферическим движением твердого тела в связи с тем, что траектории всех точек тела при таком движении располагаются на поверхностях сфер, описанных из неподвижной точки. Тело, совершающее вращение вокруг неподвижной точки, имеет три степени свободы, так как закрепление одной точки тела уменьшает число степеней свободы на три единицы, а свободное тело имеет шесть степеней свободы. Одной из главных задач при изучении вращения тела вокруг неподвижной точки является установление величин, характеризующих это движение, т. е. углов Эйлера, угловой скорости, углового ускорения, и вывод формул для вычисления скоростей и ускорений точек тела.
Уравнения вращения твердого тела вокруг неподвижной точки (Углы Эйлера)
Три степени свободы, которые имеет тело при вращении вокруг неподвижной точки, требуют для задания положения тела относительно какой-либо системы координат трех независимых величин. Эти три величины, или параметра, можно задать различными способами. В теоретической механике наибольшее применение получили так называемые углы Эйлера, рассмотренные ниже.
Через неподвижную точку 
Первый из этих углов—угол прецессии  — определяет положение линии узлов
— определяет положение линии узлов  , которая является линией пересечения координатных плоскостей
, которая является линией пересечения координатных плоскостей  и
и  относительно неподвижной координатной оси
относительно неподвижной координатной оси  . Для изменения этого угла тело должно вращаться вокруг координатной оси
. Для изменения этого угла тело должно вращаться вокруг координатной оси  , которую называют осью прецессии. Положение линии узлов при движении тела изменяется как относительно неподвижной системы координат
, которую называют осью прецессии. Положение линии узлов при движении тела изменяется как относительно неподвижной системы координат  , так и относительно движущегося тела, т. е. подвижной системы координат
, так и относительно движущегося тела, т. е. подвижной системы координат  . Угол
. Угол  от положительной части оси
от положительной части оси  до положительного направления линии узлов считается положительным, когда он отсчитывается против часовой стрелки, если смотреть с положительного направления оси
до положительного направления линии узлов считается положительным, когда он отсчитывается против часовой стрелки, если смотреть с положительного направления оси  . За положительное направление на линии узлов выбираем то ее направление, с которого поворот оси к оси
. За положительное направление на линии узлов выбираем то ее направление, с которого поворот оси к оси  на наименьший угол виден происходящим против часовой стрелки.
на наименьший угол виден происходящим против часовой стрелки.
Вторым углом Эйлера является угол между координатными плоскостями  и
и  . Его измеряют углом
. Его измеряют углом  между перпендикулярами к этим координатным плоскостям, которыми являются оси
между перпендикулярами к этим координатным плоскостям, которыми являются оси  и
и  . Угол
. Угол  отсчитывают от оси до оси в положительном направлении, если направление поворота оси с положительного направления линии узлов происходит против часовой стрелки.
отсчитывают от оси до оси в положительном направлении, если направление поворота оси с положительного направления линии узлов происходит против часовой стрелки.
Угол называют углом нутации, а ось , вокруг которой вращается тело при изменении угла , соответственно называют осью нутации или линией узлов.
Для полного определения положения рассматриваемого тела относительно системы координат  нужно задать угол между подвижной осью координат
нужно задать угол между подвижной осью координат  и положительным направлением линии узлов —угол собственного вращения
и положительным направлением линии узлов —угол собственного вращения  . Угол от линии узлов до оси считается положительным, если вокруг оси
. Угол от линии узлов до оси считается положительным, если вокруг оси  поворот оси
поворот оси  от линии виден происходящим против часовой стрелки.
от линии виден происходящим против часовой стрелки.
При изменении угла тело вращается вокруг так называемой оси собственного вращения , перпендикулярной плоскости, в которой лежат прямые и , образующие этот угол. Таким образом, угол определяет положение подвижной координатной оси относительно линии узлов .
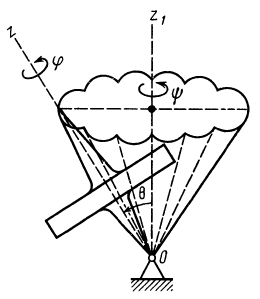
Рис. 74
Углы Эйлера широко применяются в теории гироскопов. Движение гироскопа, т. е. симметричного тела, имеющего неподвижную точку на оси симметрии и быстро вращающегося вокруг этой оси, в общем случае можно представить состоящим из трех движений (рис. 74): вращения с большой угловой скоростью вокруг оси симметрии, или оси собственного вращения, при котором изменяется угол собственного вращения (р; вращения гироскопа вместе со своей осью симметрии вокруг неподвижной оси  , при котором изменяется угол прецессии
, при котором изменяется угол прецессии  . Третье движение совершает ось симметрии, которая, участвуя в прецессионном движении, описывает коническую поверхность с вершиной в неподвижной точке, а вследствие изменения угла нутации
. Третье движение совершает ось симметрии, которая, участвуя в прецессионном движении, описывает коническую поверхность с вершиной в неподвижной точке, а вследствие изменения угла нутации  описывает в общем случае волнистую поверхность.
описывает в общем случае волнистую поверхность.
Если угол  не изменяется, то коническая поверхность является круговым конусом. Если коническую поверхность пересечь плоскостью, перпендикулярной оси прецессии, то получится кривая линия, на которой возможны узловые точки, или точки возврата. Известно, например, что земной шар кроме собственного вращения вокруг своей оси еще прецессирует и совершает нутационное движение.
не изменяется, то коническая поверхность является круговым конусом. Если коническую поверхность пересечь плоскостью, перпендикулярной оси прецессии, то получится кривая линия, на которой возможны узловые точки, или точки возврата. Известно, например, что земной шар кроме собственного вращения вокруг своей оси еще прецессирует и совершает нутационное движение.
В технике особенно важное значение имеет так называемая регулярная прецессия, когда угловые скорости вращения вокруг оси собственного вращения и вокруг неподвижной оси прецессии постоянны и угол между этими осями (угол нутации) остается тоже постоянным.
При вращении тела вокруг неподвижной точки в общем случае изменяются все три угла Эйлера:  ,
,  и
и  . Углы Эйлера являются независимыми параметрами, или обобщенными координатами, характеризующими положение тела с одной неподвижной точкой относительно неподвижной системы координат. Задание трех углов Эйлера для тела, вращающегося вокруг неподвижной точки, как функций времени является необходимым и достаточным для полного описания такого движения тела.
. Углы Эйлера являются независимыми параметрами, или обобщенными координатами, характеризующими положение тела с одной неподвижной точкой относительно неподвижной системы координат. Задание трех углов Эйлера для тела, вращающегося вокруг неподвижной точки, как функций времени является необходимым и достаточным для полного описания такого движения тела.
Итак, для определения положения тела с одной неподвижной точкой в любой момент времени надо задать углы Эйлера как однозначные функции времени, т. е.

Уравнения (1) являются уравнениями вращения твердого тела вокруг неподвижной точки. Если эти уравнения заданы, то в любой момент времени известно положение твердого тела относительно системы координат  .
.
Отметим, что углы Эйлера не являются единственной комбинацией трех независимых углов для тела, имеющего одну неподвижную точку. Существуют и другие комбинации углов, определяющих положение одной системы координат относительно другой.
Теорема о конечном перемещении твердого тела, имеющего одну неподвижную точку
Тело, имеющее одну неподвижную точку, из одного положения в любое другое можно перевести одним поворотом вокруг оси, проходящей через неподвижную точку. Эту ось называют осью конечного вращения.
Положение тела с неподвижной точкой относительно некоторой системы отсчета можно полностью определить, если задать на какой-либо неподвижной сфере, описанной из неподвижной точки тела, положение сферической фигуры, скрепленной с этим телом. За сферическую фигуру можно принять любую часть поверхности сферы таким же радиусом, что и радиус неподвижной сферы, который обычно принимают равным единице. За сферическую фигуру можно принять также всю сферу единичного радиуса.
При движении тела вокруг неподвижной точки скрепленная с движущимся телом сфера единичного радиуса движется по неподвижной сфере того же радиуса. Положение сферы полностью определяется заданием на этой сфере дуги большого круга, крепленной со сферой.
Пусть положение  тела характеризуется дугой большого круга
тела характеризуется дугой большого круга  , описанной из неподвижной точки тела, а в положении
, описанной из неподвижной точки тела, а в положении  —той же дугой, но в другом положении на сфере
—той же дугой, но в другом положении на сфере  (рис. 75). Аналогично тому, как находится центр конечного вращения для плоской фигуры при плоском перемещении, найдем точку
(рис. 75). Аналогично тому, как находится центр конечного вращения для плоской фигуры при плоском перемещении, найдем точку  на сфере в случае тела, имеющего одну неподвижную точку. Для этого соединяем точки
на сфере в случае тела, имеющего одну неподвижную точку. Для этого соединяем точки  с
с  и
и  с
с  дугами большого круга, проведенными из неподвижной точки тела и целиком лежащими на неподвижной сфере. В серединах дуг
дугами большого круга, проведенными из неподвижной точки тела и целиком лежащими на неподвижной сфере. В серединах дуг 
 из точек
из точек  и
и  проводим сферические перпендикуляры, т. е. дуги большого круга
проводим сферические перпендикуляры, т. е. дуги большого круга  и
и  касательные к которым перпендикулярны в точках и соответственно касательным дуг и .
касательные к которым перпендикулярны в точках и соответственно касательным дуг и .
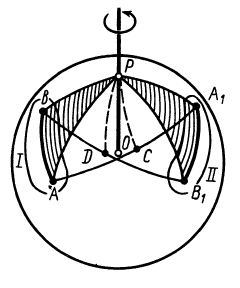
Рис. 75
Эти перпендикуляры, лежащие на сфере, пересекутся в точке . Из равенства прямоугольных сферических треугольников  и
и  , имеющих общий катет
, имеющих общий катет  и равные катеты
и равные катеты  и
и  , следует, что гипотенузы этих сферических треугольников тоже равны, т. е. точки 5 и й, равноудалены от точки Р.
, следует, что гипотенузы этих сферических треугольников тоже равны, т. е. точки 5 и й, равноудалены от точки Р.
Аналогично доказывается, что точки и тоже одинаково удалены от точки . Если повернуть заштрихованный сферический треугольник  вокруг оси, проходящей через точку и неподвижную точку
вокруг оси, проходящей через точку и неподвижную точку  , то этот треугольник, перемещаясь по сфере, совпадет всеми своими точками с равным ему по трем сторонам сферическим треугольником
, то этот треугольник, перемещаясь по сфере, совпадет всеми своими точками с равным ему по трем сторонам сферическим треугольником  , так как сферический угол на сфере, на который надо повернуть вокруг
, так как сферический угол на сфере, на который надо повернуть вокруг  дугу
дугу  до совпадения с дугой
до совпадения с дугой  , равен сферическому углу на той же сфере, на который надо повернуть дугу
, равен сферическому углу на той же сфере, на который надо повернуть дугу  до совпадения с дугой
до совпадения с дугой  .
.
Итак, путем поворота вокруг оси, перпендикулярной поверхности сферы и проходящей через точку и, следовательно, проходящей также и через центр сферы, где расположена неподвижная точка, тело можно переместить из одного положения в любое другое. Для каждых двух положений тела получаются соответствующая точка и, следовательно, соответствующая ось конечного вращения, проходящая через эту точку и неподвижную точку тела.
Мгновенная ось вращения (Аксоиды)
Ось, вокруг которой следует вращать тело, имеющее одну неподвижную точку, для перевода его из одного положения в другое, бесконечно близкое первому, называют мгновенной осью вращения (или мгновенной осью) для данного момента времени.
Любое движение тела вокруг неподвижной точки можно заменить последовательностью вращений вокруг совокупности мгновенных осей. Геометрическое место мгновенных осей относительно неподвижных осей координат, по отношению к которым рассматривается движение тела, называется неподвижным аксоидом. Неподвижный аксоид является конической поверхностью с вершиной в неподвижной точке тела, так как все мгновенные оси проходят через неподвижную точку.
Геометрическое место мгновенных осей в движущемся теле представляет подвижный аксоид, являющийся также конической поверхностью. Для каждого движения твердого тела вокруг неподвижной точки имеется пара аксоидов. При этом, когда тело совершает вращение вокруг неподвижной точки, подвижный аксоид катится по неподвижному без скольжения, так как общая образующая этих аксоидов в каждый момент времени служит мгновенной осью, вокруг которой вращается тело, и, следовательно, все точки оси в рассматриваемый момент времени неподвижны. Если подвижный аксоид катится без скольжения по неподвижному аксоиду, то осуществляется движение тела вокруг неподвижной точки.
Очевидно, что при плоском движении твердого тела конические аксоиды являются цилиндрическими поверхностями, которые в пересечении с плоскостью движения плоской фигуры образуют центроиды для этой фигуры.
Практически понятие аксоидов используется для классификации видов прецессионных движений гироскопов.
Угловая скорость и угловое ускорение при вращении тела вокруг неподвижной точки
Так как движение тела, имеющего одну неподвижную точку, в каждый момент времени можно считать вращением вокруг мгновенной оси, то в качестве величин, характеризующих это движение, можно ввести мгновенную угловую скорость и мгновенное угловое ускорение вращения твердого тела вокруг неподвижной точки. Очевидно, вводимая угловая скорость является векторной величиной, направленной в каждый момент времени по соответствующей мгновенной оси, и при использовании правой системы координат вектор угловой скорости  направлен по мгновенной оси так, что с направления этого вектора видно вращение тела вокруг мгновенной оси против часовой стрелки. Модуль вектора угловой скорости можно выразить через элементарный угол поворота
направлен по мгновенной оси так, что с направления этого вектора видно вращение тела вокруг мгновенной оси против часовой стрелки. Модуль вектора угловой скорости можно выразить через элементарный угол поворота  вокруг мгновенной оси за время
вокруг мгновенной оси за время  :
:
Элементарный угол поворота  , аналогично случаю вращения тела вокруг неподвижной оси, следует рассматривать как угол между двумя положениями в моменты
, аналогично случаю вращения тела вокруг неподвижной оси, следует рассматривать как угол между двумя положениями в моменты  и
и  подвижной плоскости, скрепленной с телом и проходящей через мгновенную ось в момент времени
подвижной плоскости, скрепленной с телом и проходящей через мгновенную ось в момент времени  .
.
Введенный таким образом вектор угловой скорости  характеризует угловую скорость вращения вокруг мгновенной оси, направление мгновенной оси и направление вращения тела вокруг этой оси. Вектор угловой скорости
характеризует угловую скорость вращения вокруг мгновенной оси, направление мгновенной оси и направление вращения тела вокруг этой оси. Вектор угловой скорости  можно прикладывать в любой точке мгновенной оси (рис. 76).
можно прикладывать в любой точке мгновенной оси (рис. 76).
За вектор углового ускорения  при вращении тела вокруг неподвижной точки принимают вектор, который характеризует изменение угловой скорости со в данный момент как по числовой величине, так и по направлению. Известно, что такой характеристикой является производная по времени от вектора угловой скорости
при вращении тела вокруг неподвижной точки принимают вектор, который характеризует изменение угловой скорости со в данный момент как по числовой величине, так и по направлению. Известно, что такой характеристикой является производная по времени от вектора угловой скорости  . Таким образом, угловое ускорение
. Таким образом, угловое ускорение
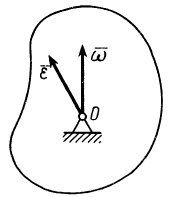
Рис. 76
Так как угловая скорость может изменяться по модулю и направлению, то в общем случае угловое ускорение не направлено по мгновенной оси, а имеет направление как производная по времени от вектора , параллельное касательной к годографу этого вектора. Условимся угловое ускорение  изображать в любой точке прямой, параллельной этой касательной годографа , но проходящей через неподвижную точку тела.
изображать в любой точке прямой, параллельной этой касательной годографа , но проходящей через неподвижную точку тела.
Скорости точек тела при вращательном движении вокруг неподвижной точки
При рассмотрении вращательного движения тела вокруг неподвижной оси получена векторная формула Эйлера, по которой скорости точек тела полностью характеризуются общей для всех точек тела угловой скоростью вращения и расположением точек тела относительно оси вращения.
Формула Эйлера справедлива и для случая вращения твердого тела вокруг неподвижной точки.
В этом случае в каждый момент времени тело вращается вокруг мгновенной оси, проходящей через неподвижную точку, с угловой скоростью со, направленной по мгновенной оси. Точки тела, лежащие на мгновенной оси, имеют скорости, равные нулю, как и в случае неподвижной оси вращения.
Следовательно, линейные скорости точек тела при вращении вокруг неподвижной точки можно вычислять также по векторной формуле Эйлера, как и в случае вращения вокруг неподвижной оси, только радиус-вектор каждой точки удобно проводить из неподвижной точки тела.
Итак, скорость  какой-либо точки
какой-либо точки  тела (рис. 77), по векторной формуле Эйлера,
тела (рис. 77), по векторной формуле Эйлера,

Модуль скорости

где  — кратчайшее расстояние от рассматриваемой точки до мгновенной оси.
— кратчайшее расстояние от рассматриваемой точки до мгновенной оси.
Таким образом, скорости точек тела пропорциональны расстояниям от этих точек до мгновенной оси. Направление скорости какой-либо точки тела перпендикулярно плоскости, в которой находятся векторы  и
и  , а следовательно, перпендикулярно отрезку
, а следовательно, перпендикулярно отрезку  .
.
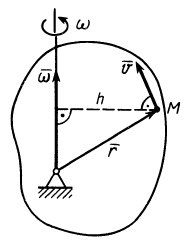
Рис. 77
Если требуется найти модуль угловой скорости тела в определенный момент времени, то для этого, согласно (3), достаточно разделить скорость какой-либо точки в этот же момент времени на кратчайшее расстояние от этой точки до мгновенной оси.
Мгновенную ось в конкретных задачах часто находят из механических условий задачи, т. е. в рассматриваемый момент времени она всегда проходит через две неподвижные точки тела. Так, если движущееся тело касается в какой-либо точке неподвижной поверхности другого тела и при этом нет скольжения, то мгновенная ось проходит через эту неподвижную в данный момент времени точку.
В случае качения без скольжения одного конуса по другому, неподвижному, конусу (рис. 78) мгновенной осью является та общая образующая этих конусов  , вдоль которой в данный момент времени они касаются друг друга. Если, например, скорость
, вдоль которой в данный момент времени они касаются друг друга. Если, например, скорость  точки
точки  известна, то угловая скорость подвижного конуса
известна, то угловая скорость подвижного конуса

где  и
и  — угол полураствора подвижного конуса.
— угол полураствора подвижного конуса.
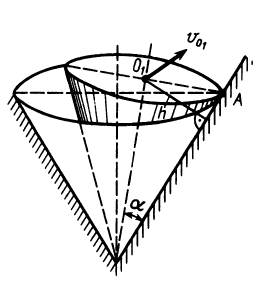
Рис. 78
Проекции угловой скорости тела  как на подвижные, так и неподвижные оси координат можно определить также через углы Эйлера как функции времени, характеризующие положение тела относительно неподвижной системы координат.
как на подвижные, так и неподвижные оси координат можно определить также через углы Эйлера как функции времени, характеризующие положение тела относительно неподвижной системы координат.
Если спроецировать правую и левую части (2) на координатные оси, то получим формулы Эйлера для проекций скоростей  ,
,  и
и  :
:

где  — координаты точек тела, скорости которых определяются.
— координаты точек тела, скорости которых определяются.
Если взять точки тела, лежащие на мгновенной оси в рассматриваемый момент времени, то для них скорости равны нулю, а следовательно, приняв равными нулю , ,, из (4) получим следующие уравнения для координат этих точек:

Эти уравнения можно представить в виде

Для определенного момента времени формула (5) является уравнением мгновенной оси. Если же величины, входящие в (5), рассматривать как функции времени, то она будет представлять собой уравнения подвижного или неподвижного аксоида (в параметрической форме) в зависимости от того, в какой системе координат она составлена.
Если являются текущими координатами точки мгновенной оси относительно подвижных осей, скрепленных с движущимся телом, а  — проекции угловой скорости тела на эти оси, то формула (5) является уравнением подвижного аксоида.
— проекции угловой скорости тела на эти оси, то формула (5) является уравнением подвижного аксоида.
Если вместо подвижных осей координат взять неподвижные оси, относительно которых рассматривается движение тела, и проекции угловой скорости тоже взять на эти оси, то тогда формула (5) будет уравнением неподвижного аксоида.
Скорость какой-либо точки можно вычислить как первую производную по времени от радиуса-вектора  этой точки, проведенного из неподвижной точки. С другой стороны, скорость точки тела, вращающегося вокруг неподвижной точки, можно вычислить по векторной формуле Эйлера (2). Следовательно, производная по времени от радиуса-вектора любой точки твердого тела, вращающегося вокруг неподвижной точки, определится по формуле
этой точки, проведенного из неподвижной точки. С другой стороны, скорость точки тела, вращающегося вокруг неподвижной точки, можно вычислить по векторной формуле Эйлера (2). Следовательно, производная по времени от радиуса-вектора любой точки твердого тела, вращающегося вокруг неподвижной точки, определится по формуле

Длина радиуса-вектора  как расстояние между двумя точками твердого тела является постоянной величиной при движении этого тела. Следовательно, равенство (6) можно рассматривать как формулу для вычисления производной по времени от вектора, модуль которого постоянен, и изменение этого вектора происходит только вследствие вращения его с угловой скоростью со вместе с телом вокруг неподвижной точки.
как расстояние между двумя точками твердого тела является постоянной величиной при движении этого тела. Следовательно, равенство (6) можно рассматривать как формулу для вычисления производной по времени от вектора, модуль которого постоянен, и изменение этого вектора происходит только вследствие вращения его с угловой скоростью со вместе с телом вокруг неподвижной точки.
Если взять подвижную систему координат  , скрепленную с телом, которое вращается вокруг неподвижной точки с угловой скоростью
, скрепленную с телом, которое вращается вокруг неподвижной точки с угловой скоростью  , то для единичных векторов
, то для единичных векторов  , направленных по этим осям координат, как для векторов, модули которых постоянны, на основании (6) имеем:
, направленных по этим осям координат, как для векторов, модули которых постоянны, на основании (6) имеем:

Формулы (7) называют формулами Пуассона.
Ускорения точек тела при вращении вокруг неподвижной точки
Формулу для ускорения какой-либо точки  тела, вращающегося вокруг неподвижной точки, нельзя получить непосредственно используя формулу для ускорения при вращательном движении вокруг неподвижной оси, так как в рассматриваемом случае угловое ускорение в общем случае не направлено по оси вращения, а следовательно, и по а>. Во всем остальном формулы для ускорения в этих случаях полностью аналогичны.
тела, вращающегося вокруг неподвижной точки, нельзя получить непосредственно используя формулу для ускорения при вращательном движении вокруг неподвижной оси, так как в рассматриваемом случае угловое ускорение в общем случае не направлено по оси вращения, а следовательно, и по а>. Во всем остальном формулы для ускорения в этих случаях полностью аналогичны.
Формулу для ускорения какой-либо точки тела  можно получить путем дифференцирования по времени вектора скорости, учитывая, что скорость вычисляют по формуле (2). Выполняя это дифференцирование, получаем
можно получить путем дифференцирования по времени вектора скорости, учитывая, что скорость вычисляют по формуле (2). Выполняя это дифференцирование, получаем

Так как

то

Формулу (8) часто называют формулой Ривальса. Часть общего ускорения точки

называют вращательным ускорением, а другую часть

— осестремительным ускорением. Следовательно, формула (8) примет вид

т. е. ускорение точки тела, вращающегося вокруг неподвижной точки, равно векторной сумме вращательного и осестремительного ускорений.
В общем случае вращательное и осестремительное ускорения не перпендикулярны; следовательно, модуль ускорения  вычисляют как диагональ параллелограмма по формуле
вычисляют как диагональ параллелограмма по формуле

Рассмотрим вращательное и осестремительное ускорения по отдельности. Вращательное ускорение вычисляют по формуле (9), аналогичной формуле (2) для скорости точки. Только здесь вместо угловой скорости  входит угловое ускорение
входит угловое ускорение  . Поэтому вращательное ускорение
. Поэтому вращательное ускорение  направлено аналогично скорости
направлено аналогично скорости  если тело вращается в рассматриваемый момент времени с угловой скоростью, равной угловому ускорению
если тело вращается в рассматриваемый момент времени с угловой скоростью, равной угловому ускорению  .
.
Модуль вращательного ускорения  определяют аналогично модулю скорости
определяют аналогично модулю скорости  [см. формулу (3)]:
[см. формулу (3)]:

где  — кратчайшее расстояние от точки тела до линии, по которой направлено угловое ускорение (рис. 79). Формула (13) для
— кратчайшее расстояние от точки тела до линии, по которой направлено угловое ускорение (рис. 79). Формула (13) для  получается из (9):
получается из (9):

где .
.
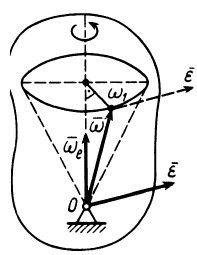
Рис. 79
Из (13) следует, что вектор углового ускорения расположен на прямой линии, проходящей через неподвижную точку. В противном случае эта точка имела бы не равное нулю вращательное ускорение.
Модуль осестремительного ускорения  можно получить из формулы (10):
можно получить из формулы (10):

так как угловая скорость  перпендикулярна скорости
перпендикулярна скорости  .
.
Осестремительное ускорение направлено по перпендикуляру к мгновенной оси, опущенному из точки, для которой оно вычисляется, т. е. по отрезку  , так как, являясь векторным произведением и , оно перпендикулярно плоскости, где находятся эти векторы, и имеет направление вектора этого векторного произведения. Если ввести вектор
, так как, являясь векторным произведением и , оно перпендикулярно плоскости, где находятся эти векторы, и имеет направление вектора этого векторного произведения. Если ввести вектор  , направленный по перпендикуляру от мгновенной оси к рассматриваемой точке, то
, направленный по перпендикуляру от мгновенной оси к рассматриваемой точке, то

В случае вращения твердого тела вокруг неподвижной оси угловое ускорение и угловая скорость направлены по этой оси; тогда расстояния  и
и  , равны. Следовательно, вращательное ускорение превращается в касательное ускорение, а осестремительное— в нормальное или центростремительное ускорение.
, равны. Следовательно, вращательное ускорение превращается в касательное ускорение, а осестремительное— в нормальное или центростремительное ускорение.
Таким образом, вращение тела вокруг неподвижной точки можно рассматривать как более общее движение, чем вращение тела вокруг неподвижной оси.
Вычисление углового ускорения
Для вычисления ускорения точек тела необходимо знать угловое ускорение . Рассмотрим два основных способа его вычисления.
1. Если известны проекции угловой скорости на подвижные или неподвижные оси координат , то проекции углового ускорения на те же оси определяют по формулам

По проекциям легко найти модуль углового ускорения и косинусы его углов с осями координат.
2. Другой способ определения углового ускорения основан на его разложении на две взаимно перпендикулярные составляющие. Если ввести единичный вектор  , направленный по
, направленный по  , то
, то

Составляющая  полного углового ускорения
полного углового ускорения  направлена по вектору
направлена по вектору  , когда
, когда  , и противоположно ему при
, и противоположно ему при  .
.
Составляющая  полного углового ускорения
полного углового ускорения  всегда перпендикулярна , так как производная по времени от единичного вектора есть вектор, перпендикулярный дифференцируемому единичному вектору и, следовательно, перпендикулярный вектору .
всегда перпендикулярна , так как производная по времени от единичного вектора есть вектор, перпендикулярный дифференцируемому единичному вектору и, следовательно, перпендикулярный вектору .
Составляющая углового ускорения  является полным угловым ускорением при вращении тела вокруг неподвижной оси, так как составляющая
является полным угловым ускорением при вращении тела вокруг неподвижной оси, так как составляющая  в этом случае равна нулю. Вычислим составляющую углового ускорения
в этом случае равна нулю. Вычислим составляющую углового ускорения  . Часто угловая скорость постоянна по модулю и изменяется только по направлению. В этом случае составляющая
. Часто угловая скорость постоянна по модулю и изменяется только по направлению. В этом случае составляющая  и полное угловое ускорение совпадает с .
и полное угловое ускорение совпадает с .
Если же угловое ускорение не равно нулю, то его можно вычислить отдельно и затем, сложив с составляющей , определить полное угловое ускорение  . Итак, если угловая скорость постоянна, то
. Итак, если угловая скорость постоянна, то
В этом случае воспользуемся определением углового ускорения через угловую скорость непосредственно:
Учитывая, что  , и применяя формулу, аналогичную производной по времени от радиуса-вектора [см. формулу (6)], когда радиус-вектор постоянен по длине, будем иметь
, и применяя формулу, аналогичную производной по времени от радиуса-вектора [см. формулу (6)], когда радиус-вектор постоянен по длине, будем иметь

где  — угловая скорость вращения дифференцируемого по времени вектора
— угловая скорость вращения дифференцируемого по времени вектора  , т. е. угловая скорость вращения мгновенной оси, по которой направлен вектор
, т. е. угловая скорость вращения мгновенной оси, по которой направлен вектор  . Модуль углового ускорения можно найти аналогично скорости точки, т. е.
. Модуль углового ускорения можно найти аналогично скорости точки, т. е.

где расстоянием  является
является  — кратчайшее расстояние от конца вектора до оси, по которой направлена угловая скорость
— кратчайшее расстояние от конца вектора до оси, по которой направлена угловая скорость  (рис. 80).
(рис. 80).
Вектор углового ускорения  пройдет через неподвижную точку и будет параллелен касательной к годографу вектора . Окончательно направление
пройдет через неподвижную точку и будет параллелен касательной к годографу вектора . Окончательно направление  берут в соответствии с формулой (18), т. е. по направлению вращения мгновенной оси в зависимости от угловой скорости
берут в соответствии с формулой (18), т. е. по направлению вращения мгновенной оси в зависимости от угловой скорости  .
.
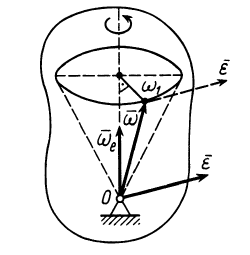
Рис. 80
Рис. 81
Рассмотрим теперь пример на вычисление угловой скорости, углового ускорения и линейных скоростей и ускорений точек тела, вращающегося вокруг неподвижной точки.
- Заказать решение задач по теоретической механике
Пример с решением
Круговой конус I с углом раствора  катится без скольжения по внутренней стороне неподвижного конуса II с углом раствора
катится без скольжения по внутренней стороне неподвижного конуса II с углом раствора  (рис. 81). Скорость точки
(рис. 81). Скорость точки  подвижного конуса постоянна и равна
подвижного конуса постоянна и равна  .
.
Определить угловую скорость и угловое ускорение подвижного конуса, а также скорости и ускорения точек  и
и  этого конуса.
этого конуса.
Решение. Мгновенной осью конуса I является образующая  . Если скорость точки
. Если скорость точки  направлена от плоскости
направлена от плоскости  во внешнюю сторону, то угловая скорость конуса
во внешнюю сторону, то угловая скорость конуса  направлена по мгновенной оси от точки
направлена по мгновенной оси от точки  к точке . Числовое значение угловой скорости
к точке . Числовое значение угловой скорости

Скорость точки равна нулю, так как эта точка находится на мгновенной оси. Скорость точки  вычисляем по формуле
вычисляем по формуле

Скорость  перпендикулярна плоскости
перпендикулярна плоскости  и направлена от нее во внешнюю сторону.
и направлена от нее во внешнюю сторону.
Угловое ускорение  вычисляем по формуле (19):
вычисляем по формуле (19):

Годографом вектора  является окружность радиуса
является окружность радиуса  :
:

Если рассмотреть плоскость, в которой находятся мгновенная ось , ось подвижного конуса  и ось неподвижного конуса
и ось неподвижного конуса  (плоскость рисунка), то при движении конуса I эта плоскость вращается вокруг оси неподвижного конуса
(плоскость рисунка), то при движении конуса I эта плоскость вращается вокруг оси неподвижного конуса  , расположенной в указанной плоскости, а следовательно, вокруг этой оси вращается и мгновенная ось , находящаяся в этой плоскости. Угловую скорость этого вращения
, расположенной в указанной плоскости, а следовательно, вокруг этой оси вращается и мгновенная ось , находящаяся в этой плоскости. Угловую скорость этого вращения  можно определить, если скорость какой-либо точки этой плоскости, участвующей только во вращении вокруг
можно определить, если скорость какой-либо точки этой плоскости, участвующей только во вращении вокруг  и не имеющей другого движения, разделить на кратчайшее расстояние от этой точки до оси
и не имеющей другого движения, разделить на кратчайшее расстояние от этой точки до оси  . Отмеченными выше свойствами обладают все точки, расположенные на оси подвижного конуса
. Отмеченными выше свойствами обладают все точки, расположенные на оси подвижного конуса  . Выбрав на этой оси точку
. Выбрав на этой оси точку  , имеем
, имеем
где  —кратчайшее расстояние от точки до . Так как
—кратчайшее расстояние от точки до . Так как

то

Таким образом,

Так как скорость точки направлена во внешнюю сторону от рисунка, то мгновенная ось вращается вокруг по часовой стрелке и, следовательно, угловое ускорение  направлено перпендикулярно плоскости
направлено перпендикулярно плоскости  во внешнюю сторону.
во внешнюю сторону.
Ускорение какой-либо точки подвижного конуса можно определить по формуле
Для точки  расстояние
расстояние  и поэтому
и поэтому  . Для вращательного ускорения имеем
. Для вращательного ускорения имеем

Ускорение  , а следовательно, и полное ускорение
, а следовательно, и полное ускорение  этой точки направлены перпендикулярно и находятся в плоскости
этой точки направлены перпендикулярно и находятся в плоскости  . С положительного направления вектора
. С положительного направления вектора  направление должно быть направлено как скорость при вращении против часовой стрелки вокруг . Для точки
направление должно быть направлено как скорость при вращении против часовой стрелки вокруг . Для точки 
Ускорение  направлено по
направлено по  от точки к точке
от точки к точке  , а ускорение —перпендикулярно
, а ускорение —перпендикулярно  и расположено в плоскости
и расположено в плоскости  .
.
Полное ускорение точки вычисляется как диагональ параллелограмма, построенного на ускорениях  и , т. е.
и , т. е.

Отметим, что  можно получить, если угловую скорость
можно получить, если угловую скорость  , направленную по мгновенной оси, разложить по правилу параллелограмма по осям подвижного и неподвижного конусов. Тогда составляющая по оси неподвижного конуса и будет угловой скоростью .
, направленную по мгновенной оси, разложить по правилу параллелограмма по осям подвижного и неподвижного конусов. Тогда составляющая по оси неподвижного конуса и будет угловой скоростью .
Общий случай движения свободного твердого тела
Разложение движения свободного твердого тела на поступательное и вращательное
Рассмотрим общий случай движения свободного твердого тела, т. е. тела, имеющего шесть степеней свободы. Покажем, что самое общее движение свободного твердого тела можно представить состоящим из поступательного движения вместе с какой-либо точкой тела и вращательного движения вокруг этой точки.
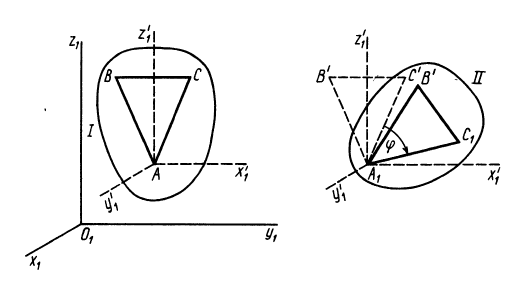
Рис. 82
Положение тела относительно какой-либо системы координат  полностью определяется заданием трех точек тела, не лежащих на одной прямой, или заданием треугольника, скрепленного с телом (рис. 82). Треугольник
полностью определяется заданием трех точек тела, не лежащих на одной прямой, или заданием треугольника, скрепленного с телом (рис. 82). Треугольник  , а следовательно, и тело, скрепленное с ним, из одного положения I в любое другое положение II можно переместить одним поступательным перемещением вместе с какой-либо точкой тела (например, точкой
, а следовательно, и тело, скрепленное с ним, из одного положения I в любое другое положение II можно переместить одним поступательным перемещением вместе с какой-либо точкой тела (например, точкой  , когда подвижная система координат
, когда подвижная система координат  перемещается поступательно) и поворотом относительно подвижной системы координат
перемещается поступательно) и поворотом относительно подвижной системы координат  , т. е. вокруг оси, проходящей через эту точку.
, т. е. вокруг оси, проходящей через эту точку.
Поступательная часть перемещения тела зависит от выбора точки, вместе с которой перемещается тело, а вращательная часть перемещения вокруг оси или вокруг точки не зависит от выбора точки. Поступательную часть перемещения можно поменять местами с вращательной частью, и, наконец, их можно выполнять одновременно, т. е. пока тело совершает поступательное перемещение из одного положения в другое, за это же время можно осуществить и поворот тела вокруг точки на требующийся угол.
Если два положения тела бесконечно близки, то истинное элементарное перемещение свободного твердого тела можно заменить элементарным поступательным перемещением вместе с какой-либо точкой тела и элементарным поворотом вокруг мгновенной оси, проходящей через эту точку, осуществляемыми за то же время, что и истинное перемещение, тела.
Любое движение свободного твердого тела, таким образом, можно заменить совокупностью поступательных движений вместе с какой-либо точкой тела и вращений вокруг этой точки, совершаемых за то же время, что и истинное движение. Поступательное движение вместе с точкой тела и подвижной системой координат является переносным движением, а движение тела относительно этой подвижной системы координат, являющееся в каждый момент времени вращением вокруг своей мгновенной оси, проходящей через эту подвижную точку тела, есть относительное движение.
Итак, любое движение свободного твердого тела можно составить из поступательного движения вместе с подвижной системой координат и сферического движения относительно этой системы координат. Для относительного сферического движения можно ввести угловую скорость  и угловое ускорение
и угловое ускорение  , которое является первой производной по времени от , как в случае вращения тела вокруг неподвижной точки.
, которое является первой производной по времени от , как в случае вращения тела вокруг неподвижной точки.
Угловую скорость и угловое ускорение относительного вращательного движения вокруг какой-либо точки тела называют в общем случае угловой скоростью и угловым ускорением свободного твердого тела. Эти величины не зависят от выбора точки тела. От выбора точки тела зависит только переносное поступательное движение тела.
Уравнения движения свободного твердого тела
В общем случае для определения положения свободного твердого тела относительно системы координат  достаточно задать относительно этой системы координат положение другой системы координат
достаточно задать относительно этой системы координат положение другой системы координат  , движущейся поступательно относительно первой системы вместе с ка-кой-либо точкой
, движущейся поступательно относительно первой системы вместе с ка-кой-либо точкой  рассматриваемого тела, и углы Эйлера, определяющие положение системы координат
рассматриваемого тела, и углы Эйлера, определяющие положение системы координат  , скрепленной с движущимся телом, относительно системы координат
, скрепленной с движущимся телом, относительно системы координат  (рис. 83).
(рис. 83).
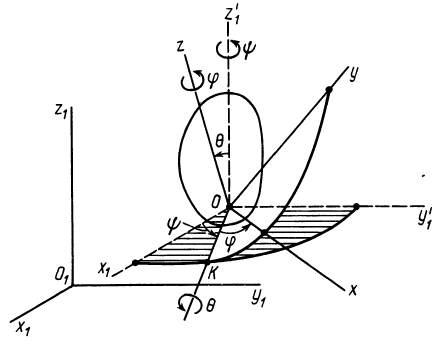
Рис. 83
Для простоты предположим, что оси  соответственно параллельны осям
соответственно параллельны осям  . Таким образом, положение свободного твердого тела относительно системы координат
. Таким образом, положение свободного твердого тела относительно системы координат  полностью определяется, если относительно этой системы задать координаты точки
полностью определяется, если относительно этой системы задать координаты точки  тела как однозначные функции времени и углы Эйлера подвижной системы координат
тела как однозначные функции времени и углы Эйлера подвижной системы координат  , скрепленной с движущимся телом, относительно системы координат
, скрепленной с движущимся телом, относительно системы координат  , поступательно движущейся вместе с точкой тела:
, поступательно движущейся вместе с точкой тела:

Уравнения (20) являются кинематическими уравнениями движения свободного твердого тела в общем случае его движения. Этих уравнений шесть, т. е. столько, сколько степеней свободы у свободного твердого тела. Первые три уравнения (20) определяют переносное движение тела вместе с точкой О, вторые три уравнения определяют вращательное движение вокруг этой точки.
Первые три уравнения для рассматриваемого движения свободного твердого тела зависят от выбора точки тела; последние три уравнения (углы Эйлера) не зависят от выбора точки , вокруг которой рассматривается вращение тела.
Скорости и ускорения точек свободного твердого тела в общем случае
Так как движение свободного твердого тела в общем случае можно представить как сложное движение, то и скорость, и ускорение какой-либо точки  этого тела можно вычислить соответственно по теоремам сложения скоростей и ускорений (рис. 84). Так, для скорости
этого тела можно вычислить соответственно по теоремам сложения скоростей и ускорений (рис. 84). Так, для скорости  точки
точки 
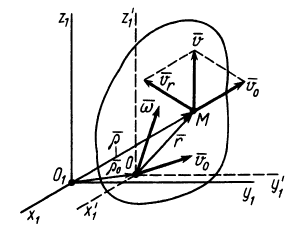
Рис. 84
Переносным движением является поступательное движение тела вместе с точкой О этого тела. Следовательно, скорости поступательного переносного движения одинаковы у всех точек тела и равны скорости  точки . Относительное движение есть вращение вокруг точки , и, следовательно, скорость относительного движения можно вычислить по векторной формуле Эйлера:
точки . Относительное движение есть вращение вокруг точки , и, следовательно, скорость относительного движения можно вычислить по векторной формуле Эйлера:

где  — радиус-вектор точки , проведенный из точки ;
— радиус-вектор точки , проведенный из точки ;  —угловая скорость вращения тела вокруг точки или подвижной мгновенной оси, проходящей через точку .
—угловая скорость вращения тела вокруг точки или подвижной мгновенной оси, проходящей через точку .
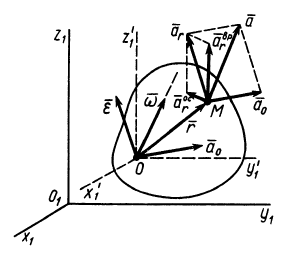
Рис. 85
Окончательно для скорости точки получим следующую формулу:

Формулу (21) можно получить непосредственным дифференцированием векторного равенства
справедливого для любого момента времени. Возьмем полные производные по времени от обеих частей равенства, учитывая изменения векторов относительно неподвижной системы координат  . Имеем
. Имеем

Здесь  — скорости точек тела и соответственно. Модуль вектора
— скорости точек тела и соответственно. Модуль вектора  как отрезка, соединяющего две точки тела, не изменяется при движении этого тела. Следовательно, по формуле производной по времени от вектора постоянного модуля получаем
как отрезка, соединяющего две точки тела, не изменяется при движении этого тела. Следовательно, по формуле производной по времени от вектора постоянного модуля получаем
Объединяя результаты, получаем формулу (21):
Так же как и при плоском движении твердого тела, часть скорости  можно истолковать как скорость от вращения тела вокруг точки .
можно истолковать как скорость от вращения тела вокруг точки .
Ускорение а точки (рис. 85) в частном случае, когда переносное движение является поступательным, определяем по формуле
Ускорения переносного движения всех точек тела равны ускорению  точки , так как за поступательное переносное движение принимается движение вместе с точкой .
точки , так как за поступательное переносное движение принимается движение вместе с точкой .
Ускорение относительного движения, как и при вращении тела вокруг неподвижной точки, состоит из вращательной и осестремительной составляющих, т. е.

где  — угловое ускорение тела.
— угловое ускорение тела.
Окончательная формула для ускорения точки свободного тела в общем случае его движения имеет вид

или на основании формулы Ривальса

где

Формулу (23) можно получить непосредственным дифференцированием векторного равенства для скоростей (21), справедливого в любой момент времени. Вычисляя полные производные по времени, при определении которых учитываются изменения векторов относительно неподвижной системы координат, получаем
Здесь  — ускорения точек
— ускорения точек  и
и  ;
;  — угловое ускорение.
— угловое ускорение.
Учитывая, что вектор  является вектором постоянного модуля, имеем
является вектором постоянного модуля, имеем
Окончательный результат выразится в форме

Заметим, что если в кинематике свободного твердого тела в качестве точки  можно брать любую точку тела, то в динамике в качестве такой точки оказывается выгодным выбирать центр масс тела.
можно брать любую точку тела, то в динамике в качестве такой точки оказывается выгодным выбирать центр масс тела.
При выборе различных точек тела в качестве полюса изменяются скорость и ускорение полюса. Угловая скорость и угловое ускорение при этом не изменяются. Докажем это для угловой скорости, используя (21).
Пусть  и
и  — две точки свободного твердого тела (рис. 86). Приняв за полюс точку
— две точки свободного твердого тела (рис. 86). Приняв за полюс точку  , для скорости точки имеем
, для скорости точки имеем

где  — угловая скорость вращения тела вокруг точки
— угловая скорость вращения тела вокруг точки  . Аналогично, приняв за полюс точку
. Аналогично, приняв за полюс точку  , для скорости точки
, для скорости точки  получим
получим

где  — угловая скорость вращения тела вокруг точки
— угловая скорость вращения тела вокруг точки  . Из (25) и (26) имеем
. Из (25) и (26) имеем

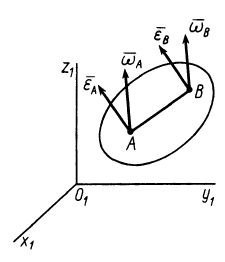
Рис. 86
для любых двух точек свободного твердого тела. Эти точки можно выбрать так, чтобы  не было параллельно вектору
не было параллельно вектору  . Тогда получаем
. Тогда получаем

т. е. угловая скорость свободного твердого тела не зависит от выбора полюса. Она инвариантна по отношению к выбору полюса.
Так как равенство (27) справедливо для любого момента времени, то, дифференцируя его по времени, получим

т. е. вектор углового ускорения свободного твердого тела тоже не зависит от выбора полюса.
- Сложное движение точки
- Сложение движение твердого тела
- Кинематика сплошной среды
- Аксиомы классической механики
- Плоское движение твердого тела
- Мгновенный центр скоростей
- Мгновенный центр ускорений
- Мгновенный центр вращения
Определение
3. Тело
вращения – это тело, полученное вращением
плоской фигуры ![]() вокруг оси, не
вокруг оси, не
пересекающей фигуру и лежащей с ней в
одной плоскости.
Ось вращения может
и пересекать фигуру, если это ось
симметрии фигуры.
Теорема
2. Пусть
криволинейная трапеция, ограниченная
графиком непрерывной неотрицательной
функции
![]() ,
,
осью![]() и отрезками прямых
и отрезками прямых![]() и
и![]()
![]() вращается вокруг оси
вращается вокруг оси![]() .
.
Тогда объём получающегося тела вращения
можно вычислить по формуле
![]()
(2)
Доказательство.
Для такого тела сечение с абсциссой
![]() – это круг радиуса
– это круг радиуса![]() ,
,
значит![]() и формула (1) даёт требуемый результат.
и формула (1) даёт требуемый результат.
Если фигура
ограничена графиками двух непрерывных
функций
![]() и
и![]() ,
,
и отрезками прямых![]() и
и![]() ,
,
причём![]() и
и![]() ,
,
то при вращении вокруг оси абсцисс
получим тело, объём которого
![]()
Пример
3. Вычислить
объём тора, полученного вращением круга,
ограниченного окружностью ![]()
![]() вокруг оси абсцисс.
вокруг оси абсцисс.
Р ешение.
ешение.
Указанный круг снизу ограничен графиком
функции
![]() ,
,
а сверху –![]() .
.
Разность квадратов этих функций:

Искомый объём
![]()
(графиком
подынтегральной функции является
верхняя полуокружность, поэтому
написанный выше интеграл – это площадь
полукруга).
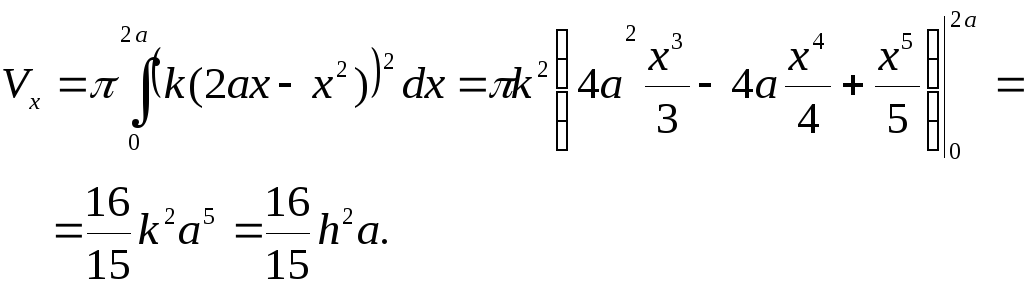
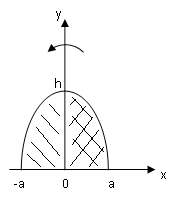
Пример 4.
Параболический сегмент с основанием
![]() ,
,
и высотой![]() ,
,
вращается вокруг основания. Вычислить
объём получающегося тела («лимон»
Кавальери).
Р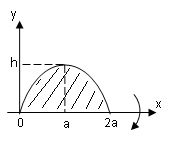 ешение.
ешение.
Параболу расположим как показано на
рисунке. Тогда её уравнение
![]() ,
,
причем![]() .
.
Найдём значение параметра![]() :
:![]() .
.
Итак, искомый объём:
Теорема
3. Пусть
криволинейная трапеция, ограниченная
графиком непрерывной неотрицательной
функции
![]() ,
,
осью![]() и отрезками прямых
и отрезками прямых![]() и
и![]() ,
,
причём![]() ,
,
вращается вокруг оси![]() .
.
Тогда объём получающегося тела вращения
может быть найден по формуле
![]() (3)
(3)
 Идея
Идея
доказательства.
Разбиваем отрезок
![]() точками
точками![]()
![]() ,
,
на части и проводим прямые![]() .
.
Вся трапеция разложится на полоски,
которые можно считать приближенно
прямоугольниками с основанием![]() и высотой
и высотой![]() .
.
Получающийся при
вращении такого прямоугольника цилиндр
разрежем по образующей и развернём.
Получим «почти» параллелепипед с
размерами:
![]() ,
,![]() и
и![]() .
.
Его объём![]() .
.
Итак, для объёма тела вращения будем
иметь приближенноё равенство
![]()
Для получения
точного равенства надо перейти к пределу
при ![]() .
.
Написанная выше сумма есть интегральная
сумма для функции ![]() ,
,
следовательно, в пределе получим интеграл
из формулы (3). Теорема доказана.
Замечание
1. В теоремах
2 и 3 условие
![]() можно опустить: формула (2) вообще
можно опустить: формула (2) вообще
нечувствительна к знаку![]() ,
,
а в формуле (3) достаточно![]() заменить на
заменить на![]() .
.
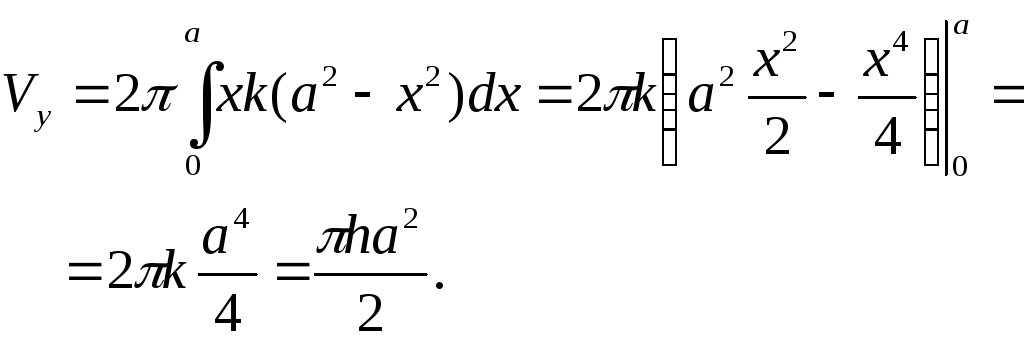
Пример
5.
Параболический сегмент (основание
![]() ,
,
высота![]() )
)
вращается вокруг высоты. Найти объём
получающегося тела.
 Решение.
Решение.
Расположим
параболу как показано на рисунке. И хотя
ось вращения пересекает фигуру, она –
ось – является осью симметрии. Поэтому
надо рассматривать лишь правую половину
сегмента. Уравнение параболы
![]() ,
,
причем![]() ,
,
значит![]() .
.
Имеем для объёма:
Замечание
2. Если
криволинейная граница криволинейной
трапеции задана параметрическими
уравнениями
![]() ,
,![]() ,
,![]() и
и![]() ,
,![]() то можно использовать формулы (2) и (3) с
то можно использовать формулы (2) и (3) с
заменой![]() на
на![]() и
и![]() на
на![]() при измененииt
при измененииt
от
![]() до
до![]() .
.
Пример
6. Фигура
ограничена первой аркой циклоиды
![]() ,
,![]() ,
,![]() ,
,
и осью абсцисс. Найти объём тела,
полученного вращением этой фигуры
вокруг: 1) оси![]() ;
;
2) оси![]() .
.
Решение.
1) Общая формула
![]() В нашем случае:
В нашем случае:
![]()
2) Общая формула
![]() Для нашей фигуры:
Для нашей фигуры:
![]()
Предлагаем
студентам самостоятельно провести все
вычисления.
Замечание
3. Пусть
криволинейный сектор, ограниченный
непре-рывной линией
![]() и лучами
и лучами![]() ,
,![]()
![]() ,
,
вращается вокруг полярной оси. Объём
получающегося тела можно вычислить по
формуле.
![]()
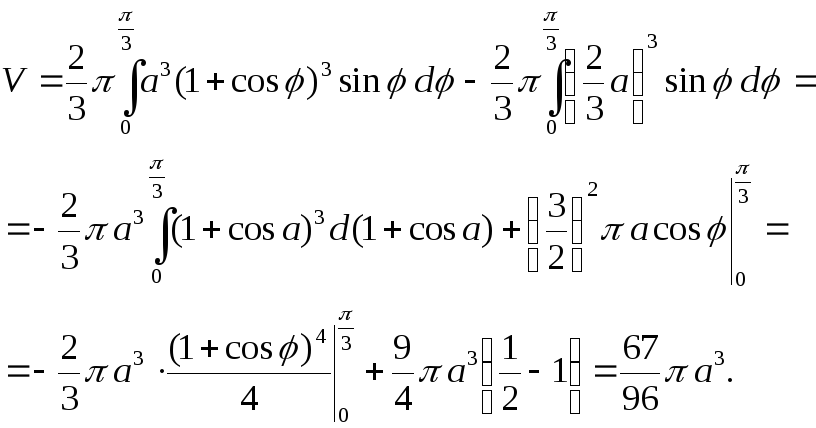
Пример
7. Часть
фигуры, ограниченной кардиоидой
![]() ,
,
лежащая вне окружности![]() ,
,
вращается вокруг полярной оси. Найти
объём тела, которое при этом получается.
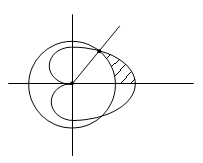 Решение.
Решение.
Обе линии, а значит и фигура, которую
они ограничивают, симметричны относительно
полярной оси. Поэтому необходимо
рассматривать лишь ту часть, для которой
![]() .
.
Кривые пересекаются при![]() и
и
![]() при
при
![]() .
.
Далее, фигуру можно рассматривать как
разность двух секторов, а значит и объём
вычислять как разность двух интегралов.
Имеем:
Задачи
для самостоятельного решения.
1. Круговой сегмент,
основание которого ![]() ,
,
высота
![]() ,
,
вращается вокруг основания. Найти объём
тела вращения.
2. Найти объём
параболоида вращения, основание которого
![]() ,
,
а высота равна![]() .
.
3. Фигура, ограниченная
астроидой
![]() ,
,![]() вращает-ся вокруг оси абсцисс. Найти
вращает-ся вокруг оси абсцисс. Найти
объём тела, которое получается при этом.
4. Фигура, ограниченная
линиями
![]() и
и![]() вращается вокруг оси абсцисс. Найти
вращается вокруг оси абсцисс. Найти
объём тела вращения.
Соседние файлы в папке Лекции по мат.анализу
- #
- #
- #
- #
- #
- #
- #
