Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014 года; проверки требуют 24 правки.

Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
 ,
,
где  — скорость вращения ротора асинхронного двигателя, об/мин
— скорость вращения ротора асинхронного двигателя, об/мин
 — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
— скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
 ,
,
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода[править | править код]
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
 .
.

В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором  , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При
, что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При  поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
Генераторный режим[править | править код]
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой  , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне
, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне  , то есть оно может принимать любые отрицательные значения.
, то есть оно может принимать любые отрицательные значения.
Режим торможения противовключением[править | править код]
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
![{displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7dc87f3dc0378759f68eb38b2d99074d1b1340a)
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне  .
.
Критическое скольжение[править | править код]
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература[править | править код]
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
![]()
![]()
![]()
![]()
(3) ![]()
![]()
![]()
![]()
![]() (4)
(4) ![]()
![]()
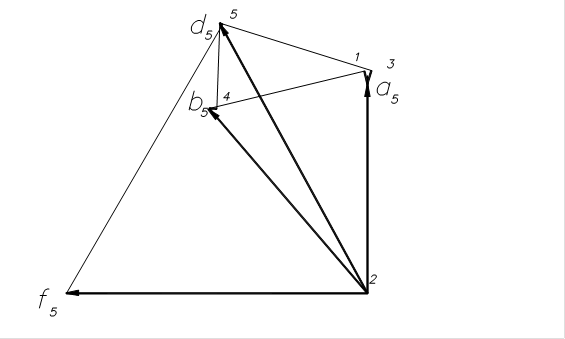
Векторные
уравнения для нахождения ускорения точки F имеют
следующий вид:
![]()
![]()
![]()
![]() (5)
(5) ![]()
![]()
![]()
![]()
![]() (6)
(6) ![]()
![]()
Для положения 5:
![]()
![]()
![]()
![]()
![]()
Для положения 10:
![]()
![]()
![]()
![]()
![]()
2.7
План ускорений
2.8
Ускорения точек звеньев механизма
Таблица 3
|
Ускорение а, м/с2 |
Положения механизма |
|
|
5 |
10 |
|
|
аА |
7,7 |
7,7 |
аВ |
8,9 |
6,6 |
аD |
11,3 |
5,88 |
aF |
11 |
3,74 |
|
аS2 |
9 |
6,57 |
|
аS3 |
5,64 |
3,32 |
|
аS4 |
9,53 |
4 |
|
аS5 |
11 |
3,74 |
2.9
Определение угловых ускорений механизма
![]()
![]()
2.10
Угловые ускорения звеньев механизма
Таблица 4
|
Угловое ускорение ε, рад/с2 |
Положение механизма |
|
|
5 |
10 |
|
|
εАВ |
7,73 |
2,56 |
εВD |
30 |
22,1 |
|
εDF |
34,5 |
16,82 |
3.
Синтез эвольвентного зубчатого зацепления
При выполнении этого листа, мы решаем следующие задачи:
1.
рассчитываем и вычерчиваем эвольвентное зубчатое зацепление пары
зубчатых колёс;
2.
строим диаграммы относительных скоростей скольжения и удельных
скольжений.
3.1
Для синтеза зубчатого зацепления используются следующие данные:
· m = 8 – модуль;
· z1 = 15, z2=32
– числа зубьев сопряженных колёс;
· параметры инструментальной
рейки (исходного контура):
–
α = 20º – угол профиля;
–
hа* = 1 – коэффициент
высоты зуба;
–
c* = 0,25 – коэффициент
радиального зазора.
3.2
Определение основных параметров передачи и размеров зубьев сопряженных
зубчатых колёс
3.2.1
Радиусы делительных окружностей:
![]() мм
мм
![]() мм
мм
3.2.2
Радиусы основных окружностей:
![]() мм
мм
![]() мм
мм
3.2.3
Делительный окружной шаг:
![]() мм
мм
3.2.4
Делительная окружная толщина зуба:
![]() мм
мм
![]() мм
мм
3.2.5
Угол зацепления:
![]()
![]()
3.2.6
Межосевое расстояние
 мм
мм
3.2.7
Радиусы начальных окружностей:
 мм
мм  мм
мм 
3.2.8
Радиусы окружностей впадин:
![]() мм
мм
![]() мм
мм
3.2.9
Радиусы окружностей вершин:
![]() мм
мм
![]() мм
мм
3.2.10 Шаг
по основной окружности (основной шаг):
![]() мм
мм
3.2.11 Коэффициент
перекрытия:

Зубчатое зацепление выполняем в масштабе (лист 2):

3.3
Построение зубчатого зацепления производим в следующей
последовательности:
1.
Проводим линию центров и откладываем межосевое расстояние;
2.
Проводим начальные окружности (rω1, rω2),
касающиеся в полюсе зацепления (точка Р), и основные окружности (rb1, rb2);
3.
Через полюс зацепления (точку Р) проводим общую касательную к обеим
окружностям, согласовав её направление с принятым направлением вращения
зубчатых колес. Точки касания общей касательной с основными окружностями
зубчатых колес определяют длину теоретической линии зацепления (АВ);
4.
Через полюс зацепления (точку Р) проводим перпендикуляр к линии центров;
5.
На линии зацепления вблизи полюса выбираем точку касания профилей К
(точки Р и К совпадают);
6.
Строим эвольвенту первого колеса:
а) отрезок КА делим на несколько равных частей и
нумеруем полученные точки в направлении от точки К цифрами 0, 1, 2… и т.д.
(точки 0 и К совпадают), за точкой А на продолжении линии КА откладываем
несколько таких же отрезков;
б) отрезки такой же длины и в том же количестве
откладываем от точки А в обе стороны по дуге основной окружности, пронумеровав
их цифрами 0′, 1′, 2′ и т.д.
в) к найденным точкам 0′, 1′, 2′ и т.д. на
основной окружности проводим из центра колеса радиальные прямые и перпендикулярные
к ним касательные, изображающие последовательные положения отрезка КА в
процессе перекатывания его по основной окружности;
г) на касательной в точке 1 откладываем длину
одного отрезка К1, на касательной в точке 2 – длину двух отрезков К1
и т.д.;
д) соединив плавной кривой последовательные
положения точки К, получающиеся при перекатывании прямой КА по основной
окружности, вычерчиваем эвольвенту, определяющую профиль зуба первого колеса;
7.
Проводим делительную окружность (радиус r1), а также окружности вершин (радиус rа1) и
впадин (радиус rf2)
первого колеса;
8.
Профиль зуба на участке между основной окружностью и окружностью
выступов вычерчиваем эвольвентой, а на участке между основной окружностью и
окружностью впадин условно вычерчиваем радиальной прямой, сопрягающейся
радиусом ρ = 0,3m = 5 мм с окружностью впадин;
9.
Откладываем по дуге делительной окружности шаг Рt и толщину st1 зуба первого колеса, находим середину
зуба, отложив дугу st1/2,
соединяем её с центром колеса и проводим ось симметрии зуба;
10.
Пользуясь симметрией, строим другой профиль зуба первого колеса, а
также ещё один – два зуба;
11.
В последовательности, оговоренной в пп. 6 – 10, строим профиль зуба
второго колеса и не менее двух – трёх зубьев для него;
12.
Находим точки a и b, ограничивающие длину практической линии
зацепления, и на одном зубе каждого колеса выделяем рабочие участки
эвольвентных профилей. По величине отрезка ab
определяем коэффициент перекрытия:
При сравнении со значением, полученным по расчётам,
получаем погрешность:
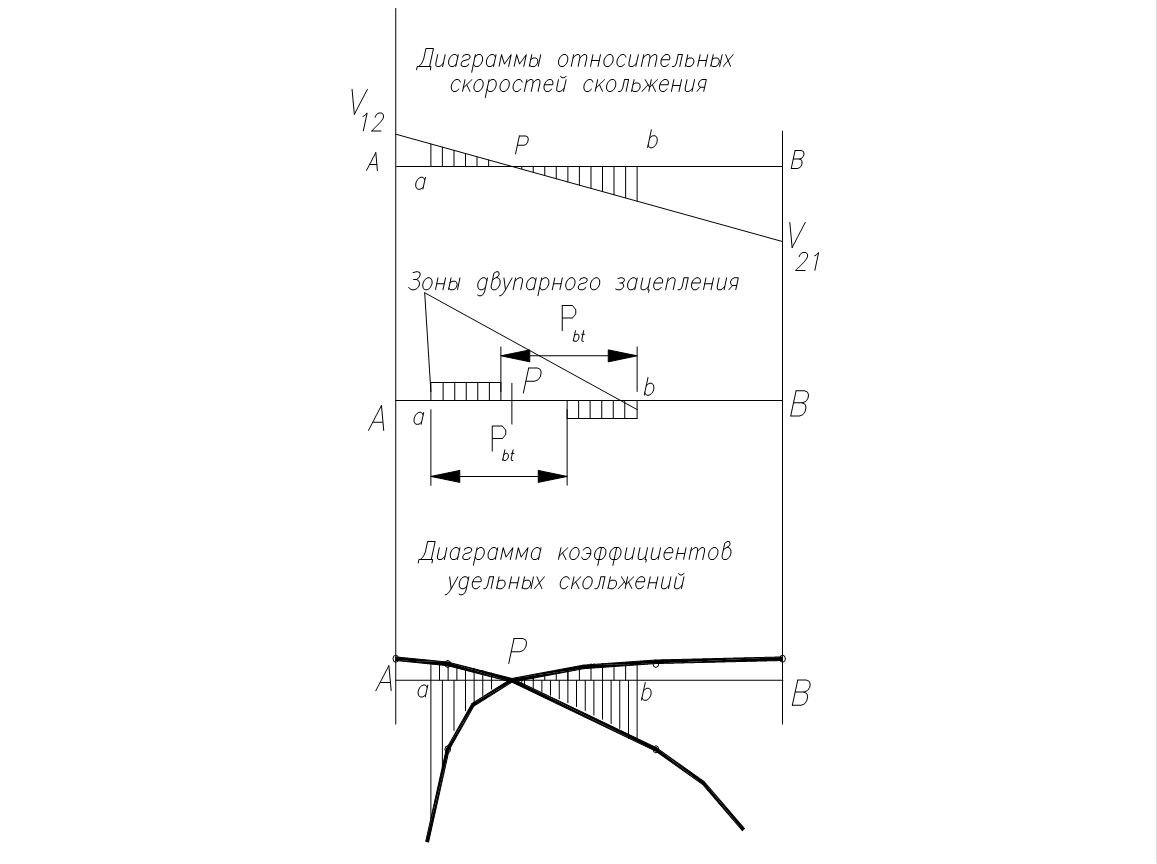
4.
Диаграммы относительных скоростей скольжения и коэффициентов удельных
скольжений.
Определяем значение относительной скорости
скольжения:
![]()
Коэффициенты удельного скольжения рассчитываем по
формулам:
![]()
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание – внизу страницы.
Скорость скольжения в червячной передаче
Во время работы
червячной передачи витки червяка
скользят по зубьям червячного колеса.
Скорость скольжения
νск
(рис. 7)
направлена по касательной к винтовой
линии делительного цилиндра червяка.

Рисунок 7 – Схема
определения скорости скольжения в
червячной передаче
Являясь относительной
скоростью, скорость скольжения легко
определяется через окружные скорости
червяка и колеса. Окружная скорость
червяка
![]() м/с; (15)
м/с; (15)
окружная скорость
колеса
![]() м/с, (16)
м/с, (16)
где dδ1,
dδ2
– диаметры червяка и колеса, мм;
ω1,
ω2
– угловые скорости червяка и колеса,
рад/с.
Скорость скольжения
в червячной передаче определяется из
параллелограмма скоростей (рис. 7)
![]() .
.
(17)
Как видно из
формулы, всегда
![]() Большое
Большое
скольжение в червячной передаче повышает
износ червячного колеса, увеличивает
склонность к заеданию.
Сила трения в
червячной передаче Fтр
= FN·f
‘ также направлена по касательной к
винтовой линии червяка в сторону,
обратную скорости скольжения. Опыты
показывают, что величина приведенного
коэффициента трения f ‘ и соответствующего
ему приведенного угла трения φ’ непостоянна
и зависит от скорости скольжения и
материала колеса.
При γ < φ’ передача
самотормозящая, т.е. недопускающее
вращение от колеса к червяку.
Передаточное число червячной передачи
Из рисунка 7 следует,
что
![]() ,
,
или
![]()
![]() ,
,
откуда
![]() ,
,
где Z1
– число заходов червяка. Из формулы (5)
![]() ;
;
Z2
– число
зубьев колеса.
Передаточное
отношение передачи

(18)
На практике в
силовых передачах применяют червяки с
числом заходов Z1=1-
4. С увеличением Z1
возрастают технологические трудности
изготовления передачи и увеличивается
число зубьев червячного колеса Z2.
Во избежание
подреза основания ножки зуба в процессе
нарезания зубьев принимают Z2
≥ 28.
Оптимальным является Z2
= 50 – 60. Диапазон передаточных чисел в
этих передачах i
= 10 – 80.
К.П.Д. Червячной передачи
Червячная передача
является зубчато-винтовой передачей,
поэтому в ней имеются потери, свойственные
как зубчатой передаче, так и передаче
винт-гайка.
Общий К.П.Д. червячной
передачи
![]() ,
,
(19)
где n
– число пар подшипников в передаче;
ηn
– К.П.Д., учитывающий потере в одной паре
подшипников;
для подшипников
качения ηn=
0,99 – 0,995;
для подшипников
скольжения ηn=
0,97 – 0,99;
ηр
– К.П.Д., учитывающий гидравлические
потери, связанные с перемешиванием и
разбрызгиванием масла в корпусе передачи;
ηз.з
– К.П.Д., учитывающий потери в зубчатом
зацеплении. Так как бронзовый зуб
червячного колеса легко прирабатывается
к виткам червяка, то принимают ηз.з=
0,97-0,98;
ηв.н.
– К.П.Д., учитывающий потери в винтовой
паре, которые составляют главную часть
всех потерь передачи. Определяют по
формуле, выведенной для винтовой пары
![]() .
.
Угол трения ρ’
зависит не только от материала червяка
и зубьев колеса, чистоты обработки
рабочих поверхностей, качества смазки,
но и от скорости скольжения
![]() .
.
Величина ρ‘
значительно снижается при увеличении
![]() ,
,
так как при этом в зоне зацепления
создаются благоприятные условия для
образования масляного клина.
Учитывая, что
![]() ,заключаем,
,заключаем,
что уменьшениеq
в допустимых пределах обеспечивает
повышение К.П.Д. червячной передачи.
При предварительных
расчетах, когда размеры червячной
передачи еще неизвестны, величину К.П.Д.
принимают ориентировочно по таблицам.
После определения
размеров передачи величину К.П.Д. уточняют
расчетом.
3. Эвольвентное зубчатое зацепление
3.1. Основной закон зацепления
Этот закон устанавливает связь между геометрией профилей зубьев и условиями передачи движения в зубчатом зацеплении (в более широком смысле – между геометрией элементов высшей пары и условиями передачи движения в механизме с высшей парой).
 Возьмём две центроиды Ц1 и Ц2, принадлежащие колёсам 1 и 2 (рис. 3.1). Эти центроиды касаются друг друга в точке П (прописная греческая буква «пи»), называемой полюсом зацепления.
Возьмём две центроиды Ц1 и Ц2, принадлежащие колёсам 1 и 2 (рис. 3.1). Эти центроиды касаются друг друга в точке П (прописная греческая буква «пи»), называемой полюсом зацепления.
Свяжем с центроидами профили Пр1 и Пр2 так, чтобы они касались друг друга в точке К. Относительная скорость точки К1 профиля Пр1 по отношению к совпадающей с ней точке К2 профиля Пр2, (в данный момент обе точки находятся на нормали n–n в точке K) обозначена на рис.3.1 как Vотн. Докажем следующие два положения: 1). Вектор  перпендикулярен нормали, в противном случае появится составляющая относительной скорости, направленная вдоль неё. Если эта составляющая будет направлена в сторону Пр2, то произойдёт внедрение профиля Пр1 в профиль Пр2, если она будет направлена в обратную сторону, то произойдёт отрыв профилей друг от друга. В обоих случаях высшая пара будет разрушена. Так что данное положение доказано.
перпендикулярен нормали, в противном случае появится составляющая относительной скорости, направленная вдоль неё. Если эта составляющая будет направлена в сторону Пр2, то произойдёт внедрение профиля Пр1 в профиль Пр2, если она будет направлена в обратную сторону, то произойдёт отрыв профилей друг от друга. В обоих случаях высшая пара будет разрушена. Так что данное положение доказано.
2) Вектор  перпендикулярен отрезку КП. Так как полюс П является мгновенным центром поворота центроиды Ц1 относительно центроиды Ц2, то, согласно положению теоретической механики, все точки, связанные с центроидой Ц1, имеют скорости, направленные перпендикулярно отрезку, соединяющему данную точку с центром (полюсом) поворота. Это и служит доказательством перпендикулярности вектора скорости и отрезка КП. Следует также отметить, что полюс зацепления – это не только точка касания центроид, но и точка пересечения контактной нормали профилей с линией центров колёс.
перпендикулярен отрезку КП. Так как полюс П является мгновенным центром поворота центроиды Ц1 относительно центроиды Ц2, то, согласно положению теоретической механики, все точки, связанные с центроидой Ц1, имеют скорости, направленные перпендикулярно отрезку, соединяющему данную точку с центром (полюсом) поворота. Это и служит доказательством перпендикулярности вектора скорости и отрезка КП. Следует также отметить, что полюс зацепления – это не только точка касания центроид, но и точка пересечения контактной нормали профилей с линией центров колёс.
Доказанные положения позволяют сделать следующий вывод. Нормаль к профилям, проведённая в точке их касания, пересекает линию центров колёс в точке, совпадающей с полюсом зацепления, и таким образом делит межосевое расстояние центроид колёс на отрезки, обратно пропорциональные их угловым скоростям,
 .
.
Другими словами, для правильной передачи движения с помощью высшей кинематической пары необходимо обеспечивать такую форму профилей зубьев, при которой нормаль к ним в точке контакта (контактная нормаль) проходила бы через полюс зацепления.
Рекомендуемые материалы
Из этих рассуждений следует также, что полюс зацепления – это не только точка касания центроид, но и точка пересечения контактной нормали с межосевой линией.
Профили, подчиняющиеся основному закону зацепления, называются сопряжёнными.
Следствие 1. Если полюс П занимает неизменное положение на линии центров колёс, то передаточное отношение постоянно, и радиусы центроид также постоянны. Это соответствует круглым зубчатым колёсам. В противном случае колёса некруглые.
Следствие 2. Если полюс П находится между центрами колёс, то они вращаются в противоположные стороны (внешнее зацепление колёс), и передаточное отношение имеет отрицательный знак.
Следствие 3. Если полюс П находится вне отрезка О1О2, (выше или ниже этих центров), то колёса вращаются в одну сторону (внутреннее зацепление колёс).
Следствие 4. Относительная скорость в точке касания профилей по существу является скоростью скольжения профилей зубьев. Чем дальше от полюса находится точка касания профилей, тем больше в ней скорость скольжения. Если в процессе передачи движения точка контакта профилей совпадёт с полюсом, то в этот момент скорость скольжения будет равна нулю.
Существует большое количество профилей зубьев, удовлетворяющих этому закону. При выборе формы профилей руководствуются их технологичностью (простотой изготовления), простотой инструмента и расчетов. Этим требованиям в полной мере отвечает эвольвентное зацепление.
3.2. Эвольвента окружности, её свойства и уравнение
Эвольвента – это траектория точки прямой линии (производящей прямой), перекатывающейся без скольжения по окружности.
Образование эвольвенты можно представить как траекторию, описываемую остриём карандаша, привязанного к концу нити, сматываемой с катушки, установленной своей осью перпендикулярно плоскости листа бумаги.
Свойства эвольвенты
1) Нормаль к эвольвенте является касательной к основной окружности.
2) Центры кривизны эвольвенты лежат на основной окружности, так что основная окружность представляет собой эволюту, т. е. геометрическое место центров кривизны эвольвенты.
 3) Радиус кривизны эвольвенты в данной точке равен отрезку производящей прямой, заключённому между данной точкой эвольвенты и точкой касания производящей прямой с основной окружностью, ρА = AC. В точке начала эвольвенты её радиус кривизны равен нулю, ρA0 = 0.
3) Радиус кривизны эвольвенты в данной точке равен отрезку производящей прямой, заключённому между данной точкой эвольвенты и точкой касания производящей прямой с основной окружностью, ρА = AC. В точке начала эвольвенты её радиус кривизны равен нулю, ρA0 = 0.
4) Радиус кривизны эвольвенты в данной точке равен дуге основной окружности, заключённой между точкой начала эвольвенты и точкой касания этой прямой с основной окружностью, ρA =  C0C.
C0C.
5) Правая и левая ветви эвольвенты симметричны.
6) Все точки эвольвенты лежат снаружи от основной окружности.
Уравнение эвольвенты
Для получения уравнения эвольвенты обратимся к рис. 3.3. Положение произвольной точки Ay эвольвенты в полярной системе координат определяется двумя координатами относительно её начального радиус-вектора OA0 (или OC0):  длиной радиус-вектора Ry и углом θy. Радиус-вектор Ry определим из прямоугольного треугольника OAyCy:
длиной радиус-вектора Ry и углом θy. Радиус-вектор Ry определим из прямоугольного треугольника OAyCy:

Для определения полярного угла θy сначала выразим длину дуги основной окружности через её радиус и центральный угол:

Выразим теперь противолежащий углу αy катет AyCy в ∆OAyCy:

На основании четвёртого свойства эвольвенты имеем

Подставляя в это равенство соответствующие выражения и решая его относительно θy, получаем
 .
.
В этих математических выражениях и на рис. 3.3 угол αy называется профильным углом эвольвенты. Разность между тангенсом какого-либо угла и самим углом называется эвольвентной функцией и обозначается тремя первыми буквами латинского названия эвольвенты involute, т. е. inv, так что окончательно уравнение имеет вид:
θy = invαy.
В математических справочниках приводятся таблицы эвольвентной функции, в которых аргумент αy изменяется от нуля до нескольких десятков градусов.
3.3. Элементы зубчатого колеса
Здесь рассматриваются те элементы колеса, которые относятся к его ободу, где располагаются зубья (рис. 3.4).
Шаг колеса p – это расстояние по делительной окружности между одноимёнными профилями двух соседних зубьев, p = π·m. Шаг включает два параметра – толщину зуба s и ширину впадины e. Если s = e, то имеем колесо с равноделённым шагом, в противном случае имеем колесо с неравноделённым шагом.
Делительная окружность (её радиус  , в зацеплении двух колёс имеет индекс номера колеса):
, в зацеплении двух колёс имеет индекс номера колеса):
– делит зуб на головку и ножку;
– модуль m на этой окружности имеет стандартное значение;
– радиус окружности имеет величину r = 0,5m ;
;
– в точке на делительной окружности профильный угол эвольвенты αy = 20º и обозначается буквой α без индекса.
Основная окружность является базовой для образования эвольвенты (от неё начинается эвольвентная часть зуба). Радиус этой окружности получается из рассмотрения прямоугольного треугольника с углом при вершине O, равным α, и одним из катетов, равным b, и гипотенузой, равной : b = ·cos α.
Окружность вершин является габаритной окружностью колеса, её радиус определяется формулой
 ,
,
где  – высота головки зуба, причём
– высота головки зуба, причём  . Множитель перед модулем называется коэффициентом высоты головки зуба и равен по величине 1, т. е.
. Множитель перед модулем называется коэффициентом высоты головки зуба и равен по величине 1, т. е.  .
.
Диаметр окружности вершин является диаметром заготовки для изготовления зубчатого колеса.
Окружность впадин ограничивает зуб у основания, её радиус равен
 ,
,
 где
где  – высота ножки зуба, определяемая равенством
– высота ножки зуба, определяемая равенством  , второе слагаемое в скобках называется коэффициентом радиального зазора и имеет величину
, второе слагаемое в скобках называется коэффициентом радиального зазора и имеет величину  .
.
Контур зуба от основной окружности до окружности вершин очерчен эвольвентой, которая сопрягается с окружностью впадин переходной кривой (эквидистантой удлинённой эвольвенты).
3.4. Элементы и свойства эвольвентного зацепления
Отметим прежде всего, что здесь рассматриваются те элементы зацепления, которые имеются именно в зацеплении колёс и исчезают, если колёса вывести из зацепления (рис. 3.5). К этим элементам относятся следующие.
Межосевое расстояние  – это расстояние между центрами колёс O1 и O2. Полюс зацепления П (пи) – это точка касания центроидных окружностей колёс с радусами
– это расстояние между центрами колёс O1 и O2. Полюс зацепления П (пи) – это точка касания центроидных окружностей колёс с радусами  и
и  , которые в эвольвентном зацеплении называются начальными окружностями. Теоретическая линия зацепления N1N2 – это геометрическое место точек мгновенного касания профилей зубьев, отмеченное на неподвижной плоскости. Процесс передачи движения происходит таким образом, что профили одной пары зубьев на протяжении некоторого времени касаются друг друга, т. е. имеют общую нормаль. На основании первого свойства эвольвенты нормаль к ней является касательной к основной окружности, а для двух касающихся друг друга профилей является касательной к обеим основным окружностям. Поэтому для данных профилей контактная нормаль является единственной и лежит на общей касательной к основным окружностям, образуя таким образом прямолинейную линию зацепления. С учётом геометрических размеров конкретных колёс линия зацепления используется для передачи движения только в пределах зоны, заключённой между точками её пересечения с окружностями вершин (рис.3.5). Эта зона называется активной линией зацепления. Её границы на рис. 3.5 отмечены точками H1 и H2.
, которые в эвольвентном зацеплении называются начальными окружностями. Теоретическая линия зацепления N1N2 – это геометрическое место точек мгновенного касания профилей зубьев, отмеченное на неподвижной плоскости. Процесс передачи движения происходит таким образом, что профили одной пары зубьев на протяжении некоторого времени касаются друг друга, т. е. имеют общую нормаль. На основании первого свойства эвольвенты нормаль к ней является касательной к основной окружности, а для двух касающихся друг друга профилей является касательной к обеим основным окружностям. Поэтому для данных профилей контактная нормаль является единственной и лежит на общей касательной к основным окружностям, образуя таким образом прямолинейную линию зацепления. С учётом геометрических размеров конкретных колёс линия зацепления используется для передачи движения только в пределах зоны, заключённой между точками её пересечения с окружностями вершин (рис.3.5). Эта зона называется активной линией зацепления. Её границы на рис. 3.5 отмечены точками H1 и H2.

Угол зацепления  w – это угол между линией зацепления и общей касательной к начальным окружностям, проведённой через полюс зацепления.
w – это угол между линией зацепления и общей касательной к начальным окружностям, проведённой через полюс зацепления.
Сопряжённые (или парные) точки – это точки профилей зубьев, которыми они касаются друг друга на линии зацепления.
Радиальный зазор – это расстояние на межосевой линии между точками пересечения её с окружностью вершин одного колеса и впадин другого колеса.
Свойства зацепления
1) Передаточное отношение постоянно в любой фазе зацепления, так как оно может быть выражено через радиусы основных окружностей. Для доказательства используем подобные прямоугольные треугольники (рис. 3.5)  и
и  и запишем цепочку равенств:
и запишем цепочку равенств:
 .
.
2) Передаточное отношение не зависит от изменения межосевого расстояния по той же причине, что и в предыдущем случае.
3) Правильное зацепление эвольвентных профилей происходит только в пределах линии зацепления N1N2, так как только в этих пределах контактирующие эвольвентные профили имеют общую нормаль.
4) Эвольвентные колёса одного модуля имеют полную взаимозаменяемость, т. е. могут составить правильное зацепление.
3.5. Методы изготовления
 зубчатых колёс
зубчатых колёс
Метод копирования заключается в том, что профиль зуба колеса повторяет форму профиля инструмента (рис. 3.6), который, в свою очередь, теоретически точно соответствует форме эвольвенты и переходной кривой зуба конкретного колеса. Инструментом могут служить дисковая или пальцевая модульные фрезы, или протяжка. Достоинством метода является возможность применения универсального обоудования (горизонтально- или вертикально-фрезерных станков), оснащенного делительной головкой для точного поворота заготовки на угловой шаг после обработки очередной впадины. Такое оборудование имеется, как правило, в ремонтной службе любого предприятия. К недостаткам следует отнести низкую точность и невысокую производительность. Кроме того, геометрия эвольвенты полностью определяется радиусом основной окружности, зависящей от модуля и числа зубьев, поэтому каждое колесо по существу должно иметь собственный инструмент для нарезания зубьев. Так как это невозможно, то применяют наборы фрез одного модуля из 8 или 15 штук. Каждая фреза набора используется для изготовления нескольких колёс с разными числами зубьев, одному из которых она обеспечивает номинально точную эвольвенту, а другие получают ошибку профиля. Ошибка получается тем больше, чем больше отклоняется число зубьев колеса от номинала. Метод обкатки (огибания) состоит в том, что профиль зуба колеса получается как огибающая ряда последовательных положений профиля инструмента (рис. 3.7).

С точки зрения кинематики движение инструмента относительно ещё ненарезанного колеса с помощью специальной цепи деления станка повторяет то движение, которое осуществляется в зубчатой передаче. Так как инструмент, по существу представляет собой зубчатое колесо с геометрией режущего инструмента, то в процессе нарезания он срезает всё, что попадает в зону движения режущих кромок, а оставшееся и представляет собой зубья колеса. Метод характеризуется высокой точностью, производительностью и, что немаловажно, позволяет инструментом одного модуля изготавливать зубчатые колёса с любым числом зубьев. К недостаткам метода можно отнести необходимость в специальном зубообрабатывающем оборудовании, однако этот недостаток с лихвой компенсируется достоинствами метода.
3.6. Геометрия реечного производящего исходного контура
Реечным производящим исходным контуром (коротко – исходным контуром или инструментальной рейкой) называется профиль зуборезной гребёнки, применяемой для нарезания зубьев на зубострогальном станке, и профиль нормального сечения червячной фрезы, применяемой для нарезания зубьев на зубофрезерном станке. Форма и размеры исходного контура устанавливаются Государственным стандартом. Элементы и размеры исходного контура можно увидеть на рис. 3.8.
Делительная прямая проходит точно посeредине высоты зубьев и делит, таким образом, высоту зуба пополам. По этой прямой шаг исходного контура p = π·m делится на две равные части, толщину зуба s и ширину впадины e, равные половине шага каждая.
Часть контура выше делительной прямой называется головкой, ниже – ножкой исходного контура. Таким образом, делительная прямая делит зуб исходного контура на головку и ножку. Как видно из рис. 3.8, прямолинейная часть профиля мсходного контура заключена между граничными прямыми, параллельными делительной прямой. Эти прямые отстоят от делительной на расстояние  вверх и вниз от неё. Сверху зуб ограничен прямой вершин, отстоящей от граничной прямой головок на величину
вверх и вниз от неё. Сверху зуб ограничен прямой вершин, отстоящей от граничной прямой головок на величину  , снизу он ограничен прямой впадин, отстоящей
, снизу он ограничен прямой впадин, отстоящей
 от граничной прямой ножек на то же расстояние. С учётом отмеченных размеров общая высота зуба исходного контура получается
от граничной прямой ножек на то же расстояние. С учётом отмеченных размеров общая высота зуба исходного контура получается
 .
.
Наклон прямолинейных участков профиля относительно вертикали составляет угол  , который называется углом профиля реечного производящего исходного контура.
, который называется углом профиля реечного производящего исходного контура.
Расстояние по нормали между одноимёнными точками двух соседних зубьев называется нормальным шагом исходного контура  (он равен основному шагу зубчатого колеса pb, поэтому на рис. 3.8 он так и обозначен) и определяется формулой
(он равен основному шагу зубчатого колеса pb, поэтому на рис. 3.8 он так и обозначен) и определяется формулой
 .
.
При изготовлении зубчатого колеса прямолинейная часть профиля исходного контура формирует эвольвенту зуба колеса, а скруглённая часть головки исходного контура формирует переходную кривую на ножке зуба колеса. Рабочая рейка, используемая в реечной передаче, отличается от инструментальной тем, что в ней срезана скруглённая часть на головках зубьев. Тем самым обеспечивается радиальный зазор в передаче, потому что общая высота зуба рабочей рейки равна высоте зуба зубчатого колеса.
При нарезании зубчатого колеса заготовка и инструмент (исходный контур) принудительно движутся относительно друг друга, как колёса в зубчатой передаче, поэтому в зацеплении инструмента и нарезаемого колеса присутствуют все элементы зацепления двух колёс, в том числе и центроиды. Центроидой нарезаемого колеса всегда служит его делительная окружность. Центроида инструмента называется станочно–начальной прямой и может совпадать или не совпадать с делительной прямой. В первом случае получается так называемое нулевое колесо. Если станочно-начальная прямая расположена выше делительной, что соответствует смещению инструмента в сторону от центра колеса, то получается положительное колесо. Такое название связано с тем, что смещение инструмента определяется величиной  , где
, где  называется коэффициентом смещения, и в данном случае он считается положительным. Если станочно-начальная прямая расположена ниже делительной, то получается отрицательное колесо, так как в этом случае коэффициент смещения считается отрицательным.
называется коэффициентом смещения, и в данном случае он считается положительным. Если станочно-начальная прямая расположена ниже делительной, то получается отрицательное колесо, так как в этом случае коэффициент смещения считается отрицательным.
3.7. Подрез зуба колеса и его предотвращение
Подрезом зуба называется пересечение траектории точки A. лежащей на граничной прямой головок исходного контура (см. рис. 3.8), с эвольвентой зуба нарезаемого колеса. В результате этого происходит утонение ножки зуба в его опасном сечении при работе на изгиб (рис.3.9) и уменьшение плавности работы передачи из-за сокращения эвольвентной части зуба.
Подрез, как правило, недопустим.  Он наступает при количестве зубьев колеса, которое меньше некоторого значения, называемого минимальным числом зубьев. Для определения этого числа зубьев обратимся к рис. 3.10.
Он наступает при количестве зубьев колеса, которое меньше некоторого значения, называемого минимальным числом зубьев. Для определения этого числа зубьев обратимся к рис. 3.10.
Если число зубьев нарезаемого колеса достаточно велико,  , то конец N’ теоретической линии зацепления при нарезании располагается выше граничной прямой головок инструмента, и подрез отсутствует. Если число зубьев нарезаемого колеса мало
, то конец N’ теоретической линии зацепления при нарезании располагается выше граничной прямой головок инструмента, и подрез отсутствует. Если число зубьев нарезаемого колеса мало  , то конец N” теоретической линии зацепления расположен ниже граничной прямой головок, и подрез есть. Наконец, если граничная прямая головок проходит точно через границу теоретической линии зацепления, то подреза ещё нет, т. е. имеет место некое пограничное состояние. Число зубьев колеса, соответствующее этому состоянию, равно минимальному, т. е.
, то конец N” теоретической линии зацепления расположен ниже граничной прямой головок, и подрез есть. Наконец, если граничная прямая головок проходит точно через границу теоретической линии зацепления, то подреза ещё нет, т. е. имеет место некое пограничное состояние. Число зубьев колеса, соответствующее этому состоянию, равно минимальному, т. е.  . Выразим отрезок KП на межосевой линии двояким образом. С одной стороны он равен , с другой, последовательно рассмат-ривая треугольники ПКN и ПОN, имеем
. Выразим отрезок KП на межосевой линии двояким образом. С одной стороны он равен , с другой, последовательно рассмат-ривая треугольники ПКN и ПОN, имеем  .
.

 Приравнивая правую часть полученного выражения к и, решая новое равенство относительно , получаем
Приравнивая правую часть полученного выражения к и, решая новое равенство относительно , получаем
 .
.
Стандартным параметрам исходного контура соответствует = 17.
 При необходимости изготовления колеса с числом зубьев, меньшем минимального, и предотвращения подреза следует инструментальную рейку сместить от центра колеса на такую величину, при которой её граничная прямая головок пройдёт через точку N линии зацепления (рис. 3.11). Определим необходимую величину смещения. Согласно рис. 3.11 имеем с одной стороны
При необходимости изготовления колеса с числом зубьев, меньшем минимального, и предотвращения подреза следует инструментальную рейку сместить от центра колеса на такую величину, при которой её граничная прямая головок пройдёт через точку N линии зацепления (рис. 3.11). Определим необходимую величину смещения. Согласно рис. 3.11 имеем с одной стороны
 ,
,
и с другой стороны  или
или
 .
.
Так как  , то, приравнивая правые части этих выражений и заменив
, то, приравнивая правые части этих выражений и заменив  на
на  , после несложных преобразований находим искомый коэффициент смещения:
, после несложных преобразований находим искомый коэффициент смещения:
 .
.
Для стандартных размеров исходного контура  , поэтому получаем:
, поэтому получаем:  . Из этой формулы следует, что если число зубьев колеса меньше минимального, то полученный положительный коэффициент смещения означает, что для предотвращения подреза инструмент должен быть смещён в сторону от центра колеса. Если число зубьев колеса больше минимального, то коэффициент смещения получается отрицательным и указывает на допустимое смещение инструмента к центру колеса, при котором не будет подреза.
. Из этой формулы следует, что если число зубьев колеса меньше минимального, то полученный положительный коэффициент смещения означает, что для предотвращения подреза инструмент должен быть смещён в сторону от центра колеса. Если число зубьев колеса больше минимального, то коэффициент смещения получается отрицательным и указывает на допустимое смещение инструмента к центру колеса, при котором не будет подреза.
3.8. Качественные характеристики эвольвентного
зацепления
Коэффициент перекрытия
Коэффициентом перекрытия называется отношение длины активной линии зацепления к основному шагу зубчатого колеса, он обозначается  и определяется отношением
и определяется отношением

 .
.
Передача движения в зубчатом зацеплении происходит таким образом, что, прежде чем предыдущая пара зубьев выйдет из зацепления (из контакта), последующая должна войти в зацепление (в контакт). Чем раньше она вступит в зацепление, тем более плавно работает передача. Количественной характеристикой этого качества и является коэффициент перекрытия, т. е. он, по существу, характеризует плавность работы зубчатой передачи. Обычно величина коэффициента перекрытия заключена между 1 и 2, при этом минимальное значение не должно быть меньше 1,1. Схематически соотношение между длиной активной лини зацепления и основным шагом показано на рис. 3.12. Точка контакта профилей зубьев перемещается вдоль активной линии зацепления от точки H1 к точке H2. Основной шаг короче активной линии зацепления, поэтому в пределах этой линии работают то одна, то две пары зубьев. Если отложить, как показано на рис. 3.12, основной шаг pb от точек H1 и H2, то отрезок H1H2 будет разделён на три части. Две крайние части соответствуют зонам двухпарного зацепления зубьев, а средняя – зоне однопарного зацепления. Чем короче средняя зона, тем плавнее работает зубчатая передача, так как суммарная длина двух крайних участков становится длиннее.
Удельное скольжение
Удельным скольжением называется отношение скорости скольжения профилей в точке их касания к скорости перемещения точки касания по профилю. Этот показатель характеризует износ зубьев в результате трения скольжения их боковых (рабочих) поверхностей. Возьмём точки К1 первого профиля и К2 второго профиля,  совпадающие в данный момент друг с другом (рис. 3.13). В этих точках профили имеют общую касательную t – t, вдоль которой направлены касательные (тангенциальные) составляющие их абсолютных скоростей. В общем случае эти скорости отличаются друг от друга по величине, могут отличаться и по направлению, оставаясь на общей касательной. Разность величин этих скоростей составляет скорость скольжения в контакте зубьев.
совпадающие в данный момент друг с другом (рис. 3.13). В этих точках профили имеют общую касательную t – t, вдоль которой направлены касательные (тангенциальные) составляющие их абсолютных скоростей. В общем случае эти скорости отличаются друг от друга по величине, могут отличаться и по направлению, оставаясь на общей касательной. Разность величин этих скоростей составляет скорость скольжения в контакте зубьев.
Согласно определению, удельное скольжение выразится двумя математическими выражениями, относящимися к разным колёсам:
 и
и  .
.
Для определения тангенциальных составляющих скоростей обратимся к
рис. 3.14. Соединим точку К1 с центром О1 вращения колеса 1 радиусом R1, и точку К2, совпадающую с точкой К1, с центром О2 радиусом R2. Перпендикулярно радиусу R1 в сторону вращения колеса 1 отложим абсолютную скорость точки К1, равную  , и перпендикулярно радиусу R2 в сторону вращения колеса 2 отложим абсолютную скорость точки К2, равную
, и перпендикулярно радиусу R2 в сторону вращения колеса 2 отложим абсолютную скорость точки К2, равную  . Отметим угол β1 между радиусом R1 и перпендикуляром O1N1 к линии зацепления и β2 между радиусом R2 и перпендикуляром О2N2 также к линии зацепления. Спроецируем скорости
. Отметим угол β1 между радиусом R1 и перпендикуляром O1N1 к линии зацепления и β2 между радиусом R2 и перпендикуляром О2N2 также к линии зацепления. Спроецируем скорости  и
и  на линию зацепления N1N2. Линия зацепления направлена по нормали к профилям зубьев, поэтому проекции скоростей на неё являются нормальными составляющими, равными друг другу. Составляющие, направленные перпендикулярно линии зацепления, действуют по касательной к профилям и являются тангенциальными составляющими. Они определяются следующими цепоч-
на линию зацепления N1N2. Линия зацепления направлена по нормали к профилям зубьев, поэтому проекции скоростей на неё являются нормальными составляющими, равными друг другу. Составляющие, направленные перпендикулярно линии зацепления, действуют по касательной к профилям и являются тангенциальными составляющими. Они определяются следующими цепоч-
ками преобразований


 C учётом этого ранее записанные выражения примут следующий вид:
C учётом этого ранее записанные выражения примут следующий вид:
 ,
,  .
.
В этих выражениях буквой К обозначены совпадающие друг с другом точки К1 и К2. Схематический график удельного скольжения показан на рис. 3.15.
 График показывает, что удельное скольжение на головках зубьев меньше чем на ножках, следовательно, ножки изнашиваются интенсивнее, чем головки. Характер износа таков, что чем дальше от полюса в радиальном направлении находится зона профиля, тем больше она изнашивается. В полюсе зацепления износ от скольжения равен нулю, так как эта точка является мгновенным центром поворота одного колеса относительно другого, и точки профилей, попадающие в полюс, имеют радиус относительного вращения вокруг полюса, равный нулю.
График показывает, что удельное скольжение на головках зубьев меньше чем на ножках, следовательно, ножки изнашиваются интенсивнее, чем головки. Характер износа таков, что чем дальше от полюса в радиальном направлении находится зона профиля, тем больше она изнашивается. В полюсе зацепления износ от скольжения равен нулю, так как эта точка является мгновенным центром поворота одного колеса относительно другого, и точки профилей, попадающие в полюс, имеют радиус относительного вращения вокруг полюса, равный нулю.
Коэффициент удельного давления
Коэффициентом удельного давления называется отношение модуля зацепления к приведённому радиусу кривизны профилей зубьев в точке их контакта. Этот коэффициент применяется при расчёте зубьев на контактную прочность. Формула Герца для расчёта контактных напряжений в контакте двух цилиндров имеет вид

где  –нормальное усилие, сжимающее цилиндры,
–нормальное усилие, сжимающее цилиндры,  – приведённый модуль упругости,
– приведённый модуль упругости,  – длина контактной линии цилиндров,
– длина контактной линии цилиндров,  – приведённый радиус кривизны цилиндров.
– приведённый радиус кривизны цилиндров.
Умножив числитель и знаменатель формулы на модуль  , не изменим результат, а формула Герца приобретёт следующий вид
, не изменим результат, а формула Герца приобретёт следующий вид

где  и представляет собой коэффициент удельного давления.
и представляет собой коэффициент удельного давления.
 Приведённый радиус кривизны определяется как величина, обратная приведённой кривизне, равная сумме кривизн контактирующих профилей, т. е.
Приведённый радиус кривизны определяется как величина, обратная приведённой кривизне, равная сумме кривизн контактирующих профилей, т. е.  .
.
На основании свойств эвольвенты радиусы кривизны профилей равны:  и
и , поэтому окончательно формула получится в виде
, поэтому окончательно формула получится в виде
 .
.
Примерный вид графика коэффициента удельного давления в зависимости от положения точки контакта на линии зацепления показан на рис. 3.16.
3.9. Назначение коэффициентов смещения для нарезания зубчатых колёс
Коэффициенты смещения назначаются с целью:
– увеличения изгибной прочности зуба путём увеличения его опасного сечения вблизи основания;
– увеличения контактной прочности зуба путём использования участков эвольвенты, более удалённых от основной окружности;
– выравнивания максимальных удельных скольжений;
– предотвращения подреза малого колеса в передаче;
– увеличения плавности работы передачи путём удлинения активной линии зацепления;
– обеспечения заданного межосевого расстояния;
– обеспечения двухпарного зацепления в полюсе и других целей.
3.10. Расчёт геометрических размеров зубчатых колёс
Исходными данными для расчёта размеров служат: числа зубьев колёс  и
и  , модуль колёс , угол профиля исходного контура , коэффициенты смещения
, модуль колёс , угол профиля исходного контура , коэффициенты смещения  и
и  , коэффициент высоты головки зуба
, коэффициент высоты головки зуба  и коэффициент радиального зазора
и коэффициент радиального зазора  .
.
Угол зацепления
Формулу для определения угла зацепления приведём здесь без вывода из-за его громоздкости
 .
.
Из этой формулы, в частности, видно, что в нулевой передаче  угол зацепления
угол зацепления  равен углу профиля инструмента , в положительной передаче
равен углу профиля инструмента , в положительной передаче 
 , в отрицательной передаче всё наоборот, т.е.
, в отрицательной передаче всё наоборот, т.е.  и соответственно
и соответственно  .
.
Радиусы начальных окружностей и межосевое расстояние
Для вывода формул обратимся к рис. 3.17, на котором показаны необходимые элементы зацепления. Линия зацепления N1N2 образует угол зацепления αw с общей касательной к начальным окружностям радиусов  и
и  , касающимся друг друга в полюсе Π. Опустив перпендикуляры из центров колёс O1 и O2 на линию за
, касающимся друг друга в полюсе Π. Опустив перпендикуляры из центров колёс O1 и O2 на линию за цепления, получаем два прямоугольных треугольника N1O1П и N2O2П с углами при вершинах O1 и O2, равными αw. Из треугольника следует N1O1П
цепления, получаем два прямоугольных треугольника N1O1П и N2O2П с углами при вершинах O1 и O2, равными αw. Из треугольника следует N1O1П  , из треугольника N2O2П–
, из треугольника N2O2П–  . Так как имеют место равенства
. Так как имеют место равенства  ,
,  ,
,  и
и  , а также
, а также  ,
,  , то получаем
, то получаем  и
и  . Вместо радиусов делительных окружностей
. Вместо радиусов делительных окружностей  и
и в эти формулы можно вставить их выражения, записанные ранее, тогда
в эти формулы можно вставить их выражения, записанные ранее, тогда
 ,
,  .
.
Как видно из рисунка, межосевое расстояние равно сумме радиусов начальных окружностей, т. е.  , поэтому
, поэтому
 .
.
Произведение первых двух слагаемых в этой формуле называется делительным межосевым расстоянием. Оно имеет место, когда передача изготавливается нулевой, т. е. когда суммарный коэффициент смещения равен нулю. При этом  , и косинусы сокращаются.
, и косинусы сокращаются.
Радиусы окружностей впадин
При образовании нулевого колеса его центроидой, как всегда, является делительная окружность (рис.3.18), а центроидой инструмента служит его делительная прямая (на рисунке профиль инструмента и его делительная прямая и прямая вершин показаны тонкими линиями). Поэтому радиус  окружности впадин нулевого колеса равен разности
окружности впадин нулевого колеса равен разности  . При смещении инструмента на величину
. При смещении инструмента на величину  радиус окружности впадин увеличивается на эту же величину и приобретает значение
радиус окружности впадин увеличивается на эту же величину и приобретает значение

 .
.
На рис. 3.18 расположение инструмента по отношению к нарезаемому колесу изображено жирными линиями.
Радиусы окружностей вершин
Расчёт радиусов окружностей вершин понятен из рис. 3.19, где представлены те элементы зацепления, которые связаны с этим расчётом. Непосредственно из рисунка видно, что радиус окружности вершин первого колеса равен

 ,
,
радиус окружности вершин второго колеса равен
 .
.
Толщина зуба по делительной окружности
Толщина зуба колеса по делительной окружности определяется шириной впадины инструментальной рейки по станочно-начальной прямой (Рис.3.20), которая при изготовлении колеса перекатывается по его делительной окружности без скольжения.
 Размер S толщины зуба складывается из ширины
Размер S толщины зуба складывается из ширины  впадины инструментальной рейки по её делительной окружности и двух катетов прямоугольных треугольников, заштрихованных на рисунке 3.20, которые расположены на станочно-начальной прямой рейки. Вертикальные катеты этих треугольников равны , так как они представляют собой величину смещения инструмента от центра колеса при его нарезании, что, по существу, равно расстоянию между делительной и станочно-начальной прямыми. Каждый горизонтальный катет прямоугольного треугольника равен
впадины инструментальной рейки по её делительной окружности и двух катетов прямоугольных треугольников, заштрихованных на рисунке 3.20, которые расположены на станочно-начальной прямой рейки. Вертикальные катеты этих треугольников равны , так как они представляют собой величину смещения инструмента от центра колеса при его нарезании, что, по существу, равно расстоянию между делительной и станочно-начальной прямыми. Каждый горизонтальный катет прямоугольного треугольника равен  . С учётом этих соображений толщину зуба S можно выразить так
. С учётом этих соображений толщину зуба S можно выразить так
 ,
,
или в окончательном виде, после несложного преобразования
 .
.
Во всех формулах расчёта геометрических размеров зубчатых колёс коэффициенты смещения необходимо подставлять со своими знаками.
Вопросы для самопроверки
1. В чём заключается существо основного закона зацепления?
2. Какие профили зубьев колёс называются сопряжёнными?
3. Что такое эвольвента окружности, производящая прямая?
4. Какими свойствами обладает эвольвента окружности?
5. Что такое эвольвентная функция?
6. Назовите элементы зубчатого колеса, какими линиями очерчивается про- филь зуба?
7. Что называется шагом колеса, модулем, головкой, ножкой зуба?
8. В каком месте измеряется толщина зуба, ширина впадины колеса?
9. Какими свойствами обладает делительная окружность?
10. Что такое коэффициент высоты головки зуба, чему он равен?
11. Какая окружность колеса называется основной?
12. Назовите элементы зацепления пары колёс.
13. Что такое полюс зацепления?
14. Какие окружности колёс называются начальными?
15. Что такое угол зацепления?
16. Что такое линия зацепления, активная линия зацепления?
17. Что такое радиальный зазор, за счёт чего он образуется?
18. Сформулируйте свойства эвольвентного зацепления.
19. Какими методами изготавливают эвольвентные зубья, в чём заключается существо методов? Каковы основные достоинства и недостатки методов?
20. Что такое реечный производящий исходный контур(инструментальная рейка)?
21. Что такое подрез зубчатого колеса?
22. Какое число зубьев считается минимальным, от чего оно зависит?
23. Как предотвратить подрез зубчатого колеса?
24. Что такое коэффициент смещения исходного контура?
25. Какие зубчатые колёса называются нулевыми, положительными и отрицательными?
26. Назовите качественные характеристики эвольвентного зацепления.
Бесплатная лекция: “Дополнение” также доступна.
27. Что называется коэффициентом перекрытия, и что он характеризует?
28. Что такое удельное скольжение, почему возникает скольжение в контакте зубьев?
29. Почему в полюсе зацепления удельное скольжение равно нулю?
30. Что такое коэффициент удельного давления, где он применяется?
31. Для чего назначаются коэффициенты смещения при нарезании зубчатых колёс?
32. Как определяются геометрические размеры зубчатых колёс: угол зацепления, радиусы начальных окружностей, межосевое расстояние, радиусы окружностей впадин, радиусы окружностей вершин и толщина зуба по делительной окружности?
Скорость вращения магнитного поля
Если трехфазную обмотку двигателя разместить в шести пазах на внутренней поверхности статора (рис. 1), то за половину периода переменного тока вектор магнитной индукции сделает пол-оборота, а за полный период — один оборот. В этом случае обмотка статора создает магнитное поле с одной парой полюсов и называется двухполюсной.
Если обмотка статора состоит из шести катушек (по две последовательно соединенные катушки на каждую фазу), размещенных в двенадцати пазах, то за половину периода переменного тока вектор магнитной индукции повернется на четверть оборота, а за полный период — на пол-оборота. Вместо двух полюсов на трех обмотках теперь магнитное поле статора имеет четыре полюса (две пары полюсов).

Рисунок 1
Таким образом, если обмотка статора имеет 2, 3, 4 и т.д. пары полюсов, то вектор магнитной индукции за время одного периода изменения тока повернется соответственно на 1/2, 1/3, 1/4 и т.д. часть окружности статора. В общем случае, обозначив буквой р число пар полюсов, мы можем сделать вывод, что угол, описанный вектором магнитной индукции за время одного периода изменения тока, равен одной р-й части окружности статора и, следовательно, скорость вращения магнитного поля n1 обратно пропорциональна числу пар полюсов: n1 = (60f) / p (об/мин)
где f — частота переменного тока в Гц, а коэффициент 60 появился из-за того, что n1, принято измерять в оборотах в минуту.
Поскольку число пар полюсов может быть только целым, то скорость вращения магнитного поля может принимать не произвольные, а только определенные значения:

Ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле, со скоростью, несколько меньшей скорости вращения магнитного поля, так как только в этом случае в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент. Обозначим скорость вращения ротора n2. Тогда величина n1 — n2, которая называется скоростью скольжения, представляет собой относительную скорость магнитного поля и ротора, а степень отставания ротора от магнитного поля, выраженная в процентах, называется скольжением s:
s = ((n1 – n2) / (n1)) 100 %
Скольжение асинхронного двигателя при номинальной нагрузке обычно составляет 3-7 %. При увеличении нагрузки скольжение увеличивается и двигатель может остановиться.
Вращающий момент М асинхронного двигателя создается благодаря взаимодействию магнитного потока поля статора Ф с индуцированным в обмотке ротора током I2, поэтому величина его пропорциональна произведению I2Ф .
Так как в механическую работу на валу двигателя может превращаться только активная мощность, то вращающий момент будет создаваться активной составляющей тока, равной I2 cosφ2, где φ2 — угол сдвига фаз между током и ЭДС ротора. В окончательном виде выражение для вращающего момента имеет вид: M = cФI2cosφ2
где с — коэффициент, зависящий от конструктивных данных двигателя.
Двигатель будет работать устойчиво, с постоянной скоростью ротора при равновесии моментов, т. е. тогда, когда вращающий момент Мвр равен тормозному моменту на валу двигателя Мтор: Мвр = Мтор
Любой нагрузке машины соответствует определенное число оборотов ротора n2 и определенное скольжение s.
Магнитное поле статора вращается относительно ротора со скоростью n1 — n2 и индуцирует в его обмотке ЭДС Е2, под действием которой по замкнутой обмотке ротора протекает ток I2.
Если нагрузка на валу двигателя увеличилась, т. е. увеличился тормозной момент, то равновесие моментов будет нарушено. Это приведет к уменьшению числа оборотов ротора, т. е. к увеличению скольжения. С увеличением скольжения магнитное поле статора чаще пересекает проводники обмотки ротора и индуцированная в обмотке ротора ЭДС Е2 возрастает, а следовательно, увеличивается ток в роторе и развиваемый двигателем вращающий момент. Увеличение скольжения и тока в роторе будет происходить до тех пор, пока не наступит равновесие моментов, т. е. вращающий момент не станет равен тормозному.
Аналогично протекает процесс изменения числа оборотов ротора и развиваемого момента при уменьшении нагрузки двигателя. При уменьшении нагрузки на валу двигателя тормозной момент станет меньше вращающего, что приведет к увеличению числа оборотов ротора, т. е. к уменьшению скольжения. С уменьшением скольжения уменьшаются ЭДС и ток в обмотке ротора и, следовательно, вращающий момент уменьшается до значения, равного тормозному.
