 Навигационный метод определения места судна по крюйс пеленгу применяется в яхтинге в тех случаях, когда пеленг на предмет определить можно, а вот расстояние до него — нет. Предмет пеленгуют дважды, место судна получают на момент вторых измерений. Место это будет счислимо-обсервованным, а не обсервованным. Заметим здесь, что счислимо-обсервованное место получается всегда с использованием элементов счисления (времени и отсчетов лага). Следовательно, его точность в яхтиге впрямую зависит от точности счисления,тогда как чисто обсервованное место от счисления не зависит, и на него можно полагаться вернее.
Навигационный метод определения места судна по крюйс пеленгу применяется в яхтинге в тех случаях, когда пеленг на предмет определить можно, а вот расстояние до него — нет. Предмет пеленгуют дважды, место судна получают на момент вторых измерений. Место это будет счислимо-обсервованным, а не обсервованным. Заметим здесь, что счислимо-обсервованное место получается всегда с использованием элементов счисления (времени и отсчетов лага). Следовательно, его точность в яхтиге впрямую зависит от точности счисления,тогда как чисто обсервованное место от счисления не зависит, и на него можно полагаться вернее.
 Метод определения места судна по крюйс пеленгу.
Метод определения места судна по крюйс пеленгу.
 Метод определения места судна по крюйс пеленгу.
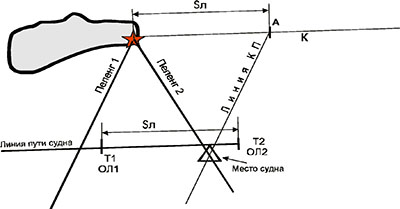
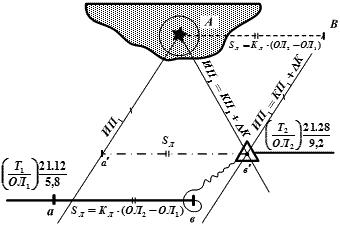
Метод определения места судна по крюйс пеленгу.При пеленговании в навигационном методе определения места судна по крюйс пеленгу замечают моменты времени Т1 и Т2 и отсчёты лага ОЛ1 и ОЛ2. Прокладка и вычисления в яхтинге выполняются в следующей последовательности.
1) Прокладывают первый пеленг П1. На линии пути отмечают счислимую точку, записывают время Т1 и отсчёт лага OЛ1.
2) Прокладывают второй пеленг П2, отмечают время Т2 и отсчёт лага OЛ2.
3) При определении места судна по крюйс пеленгу из точки ориентира проводим линию, параллельную линии пути судна в направлении движения яхты (линия К).
4) Снимаем с карты расстояние Sл между счислимыми точками на моменты первых и вторых наблюдений и откладываем его на линии К. Это же расстояние можно вычислить по формуле, если известна поправка лага (а мы полагаем, что она известна, или равна нулю, иначе как бы счисление вообще вели?): Sл= РОЛ * (1+ΔЛ/100). Получаем точку А.
5) Из точки А проводим линию, параллельную первому пеленгу (линия КП).
6) В пересечении линии КП и второго пеленга получаем место судна. Построения навигационного метода определения места судна по крюйс пеленгу хорошо видны на рисунке.
Навигационные методы определения места судна в море по расстояниям (дистанциям).
Существуют в яхтинге следующие навигационные методы определения места судна по расстояниям: по двум дистанциям, по трём дистанциям, по крюйс-расстоянию.
Здесь нужно отметить, что расстояния в навигации могут быть измерены двумя способами — визуально (с помощью дальномера и по измеренному секстаном вертикальному углу до ориентира, высота которого известна) и с помощью радиолокатора. Говоря честно, дальномер на яхтах не встретишь. Что касается измерения расстояния с помощью секстана, то способом этим в яхтинге сейчас никто не пользуется, потому что сделать это, используя радар, и проще, и надёжнее, и быстрее. Но радар — это всего лишь техника, которая, хоть и достаточно редко, но ломается. А значит, мы должны иметь всегда в резерве старые, дедовские методы. Потому метод определения места судна по расстояниям с помощью секстанта мы здесь разберём, мало ли что, а вдруг, да пригодится.
 Нам может быть известна высота предмета, как над уровнем моря, так и от его основания. Вот что известно, то и меряем. То есть либо угол между срезом воды и вершиной, либо между основанием и вершиной ориентира. Рисуем сию хитрость .
Нам может быть известна высота предмета, как над уровнем моря, так и от его основания. Вот что известно, то и меряем. То есть либо угол между срезом воды и вершиной, либо между основанием и вершиной ориентира. Рисуем сию хитрость .
Имеем: наше местоположение (точка О), при этом высотой глаза наблюдателя смело пренебрегаем, измеренный секстаном вертикальный угол между срезом воды и высотой ориентира α, высоту ориентира над уровнем моря h. Необходимо найти дистанцию до ориентира D. Используем для решения задачи в навигационном методе определения места судна по расстояниям формулы обыкновенной тригонометрии.
Из рисунка, который, собственно говоря, представляет собой прямоугольный треугольник с вершинами в точках: места яхты — О, вершины ориентира — В, и основания ориентира (не обозначаем, потому что ни к чему), видно: D = h ctg α. Измеряемые для решения этой задачи углы очень малы, и на практике в яхтинге при определении места судна по расстояниям их котангенсы не вычисляют. Просто берут полученный угол и выражают его в радианах. Тогда наша формула примет вид: D = h α(рад.).
Так как у нас известная высота ориентира дана в метрах, то и результат мы получим в метрах. Переведём его в морские мили, разделив на 1852. А наши градусы-минуты (на самом деле — только минуты, тут до градусов дело никогда не доходит), сразу переведём в радианную меру, пользуясь соотношением: tg α = α’ arc 1’ = α’ : 3438 , получим: D =3438h/1852α’=1.86 h/α’
Пример: Известны:
Высота ориентира h = 135 м.
Отсчёт секстана ОС = 0° 12,3′
Инструментальная поправка секстана i + s = +1,2′
Решение:
α = ОС + (i + s) = 0° 12,3′ + 1,2′ = 0° 13,5′
D = 1,86 (135 : 13,5) = 18,6 м. мили.
Необходимо отметить, что этот способ не очень точен, и использовать его в яхтинге, повторяю, нужно только тогда, когда другой возможности определения места судна в море у вас нет.
Но самым надёжным навигационным методом определения места судна по расстояниям до объектов на море является радиолокационный. То есть, мы снимаем дистанции с радара. Однако при описании этого навигационного метода определения места судна в море необходимо остановиться на некоторых особенностях использования локатора в яхтинге. Это очень важно, потому что незнание таких особенностей может привести к неверному, ошибочному измерению, и место яхты будет определено неправильно. А нам это совсем не нужно. Тут всё упирается в технические характеристики самого радара.
 Дело в том, что он по-разному «изображает» на своём дисплее разные поверхности, от которых отражается посланный антенной луч. Очень хорошо, чётко, отображаются высокие, обрывистые берега, разнообразные бетонные и металлические конструкции достаточно большого размера. И совсем плохо — песчаные низкие берега, всякие там мангровые заросли и малые, пусть даже металлические объекты, имеющие плавные формы. Вот, в общем-то, и вся хитрость .
Дело в том, что он по-разному «изображает» на своём дисплее разные поверхности, от которых отражается посланный антенной луч. Очень хорошо, чётко, отображаются высокие, обрывистые берега, разнообразные бетонные и металлические конструкции достаточно большого размера. И совсем плохо — песчаные низкие берега, всякие там мангровые заросли и малые, пусть даже металлические объекты, имеющие плавные формы. Вот, в общем-то, и вся хитрость .
А посему, перед тем, как определять в яхтинге расстояние до какого-либо объекта, обозначенного на карте и удобного для навигационного метода определения места судна по расстояниям, необходимо, прежде всего, на эту самую карту внимательно посмотреть, и определить, с каким объектом мы имеем дело, как он будет отражать луч нашего радара. По-умному это называется: какой отражательной способностью обладает объект. А на карте указаны и характер берега, и высота его среза над уровнем моря, и даже, иногда, материал, из которого он изготовлен.
Словом, вся информация есть. Ну и выбираем то, что повыше и потвёрже. Так-то оно надёжнее будет. Особое внимание уделим буям. Они хоть и железные, но в радар не всегда хорошо видны, если не оборудованы так называемым радиолокационным отражателем. Этот отражатель на карте также обозначается специальным символом, и мы всегда стараемся выбирать буи, где таковой символ имеется.
 Отметим ещё так называемые точечные ориентиры. К ним относятся те самые буи и маленькие островки. Положение их на карте и местности таково, что при использовании в яхтинге навигационного метода определения места судна по расстояниям вероятность ошибок снижается, за что они так любимы яхтсменами. НО! Всегда помните, что остров-то никуда, по большому счёту, не денется (это надёжный ориентир), а вот буй, по разным причинам, может оказаться и в другом месте (быть переставленным или смещённым со своей позиции в результате сильного шторма или какой-либо аварии). Это уже, во многом, вопрос добросовестной корректуры коллекции карт, но и информация от гидрографических служб всегда приходит на суда с некоторым запозданием. Посему к буям всегда относимся с некоторой долей осторожности и подозрительности. Их нужно надёжно и тщательно опознавать перед использованием.
Отметим ещё так называемые точечные ориентиры. К ним относятся те самые буи и маленькие островки. Положение их на карте и местности таково, что при использовании в яхтинге навигационного метода определения места судна по расстояниям вероятность ошибок снижается, за что они так любимы яхтсменами. НО! Всегда помните, что остров-то никуда, по большому счёту, не денется (это надёжный ориентир), а вот буй, по разным причинам, может оказаться и в другом месте (быть переставленным или смещённым со своей позиции в результате сильного шторма или какой-либо аварии). Это уже, во многом, вопрос добросовестной корректуры коллекции карт, но и информация от гидрографических служб всегда приходит на суда с некоторым запозданием. Посему к буям всегда относимся с некоторой долей осторожности и подозрительности. Их нужно надёжно и тщательно опознавать перед использованием.
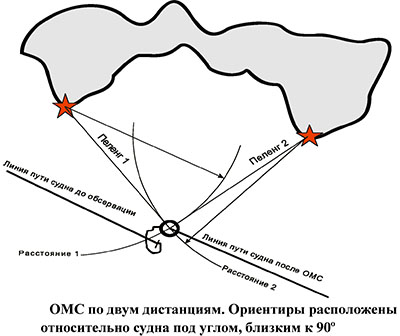
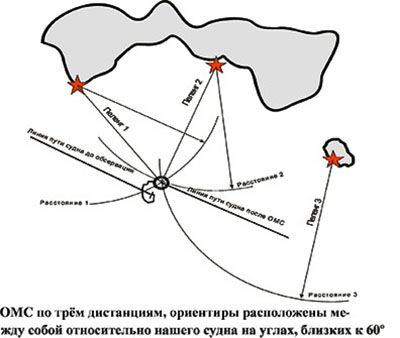
Теперь о выборе в яхтинге местоположения самих ориентиров. Тут действует похожее правило — дуги окружностей измеренных расстояний должны пересекаться под углом, наиболее близким к 90° при навигационном методе определения места судна в море по двум пеленгам, и наиболее близким к 60° и 120° при определении места судна в море по трём пеленгам. Ну а практически это выглядит, как и при навигационном методе определения места судна по пеленгам, то есть пеленги на выбранные объекты располагаются один относительно другого под тем же углом, под каким должны пересекаться дуги окружностей.
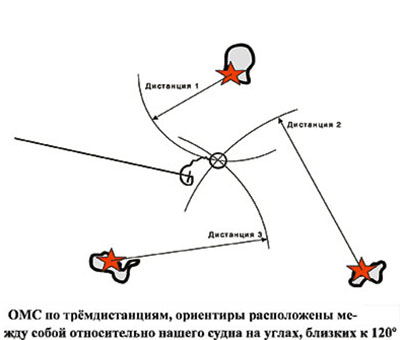 Причина этого правила та же, что и при навигационном методе определения места судна в яхтинге по пеленгам. Чем острее или тупее угол, тем больше зона возможных ошибок (см.статью).
Причина этого правила та же, что и при навигационном методе определения места судна в яхтинге по пеленгам. Чем острее или тупее угол, тем больше зона возможных ошибок (см.статью).
Точно так же важна в яхтинге и последовательность пеленгования. Только теперь сначала измеряются дистанции до ориентиров, находящихся ближе к траверзу, а затем — до ориентиров, находящихся на близких к ДП яхты курсовых углах. Это потому, что расстояния до траверзных ориентиров меняются медленнее, чем до ориентиров, лежащих ближе к ДП.
Вообще, для любых навигационных методов определения места судна в яхтинге всегда действует правило:
В первую очередь измеряются те из значений навигационных параметров (пеленги, дистанции и т.п.), которые, при движении судна, изменяются во времени медленнее. В последнюю очередь — те, которые изменяются быстрее.
Технически метод выполняется просто. Измеряем дистанцию. Затем используем циркуль (не измеритель!). Циркулем снимаем с рамки карты (а этому мы уже научились) полученное расстояние, иглу циркуля утыкаем в наш объект, дистанцию до которого мы измеряли, и, не меняя раствора (то есть — не изменяя положение ножек циркуля друг относительно друга), откладываем дугу окружности в районе предполагаемого места. В пересечении таких дуг расстояний, построенных «из ориентиров» — место нашего судна. Иногда в яхтинге нужно приводить измерения к одному моменту наблюдений. И причины этой необходимости, и методы, описаны в разделе определения места судна в море по пеленгам. Никакой разницы ни в последовательности измерений, ни в самих расчётах.
При навигационном методе определения места судна в море по трём дистанциям также образуются треугольники погрешностей. На практике в яхтинге место полагают в середине такого треугольника, если он невелик. Если же треугольник получается большой, то либо сняты ошибочные отсчёты, либо неверно опознаны ориентиры.
 Определение места судна в море по крюйс-расстоянию.
Определение места судна в море по крюйс-расстоянию.
 Определение места судна в море по крюйс-расстоянию.
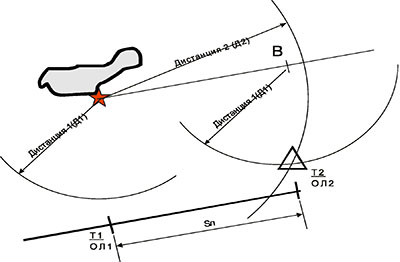
Определение места судна в море по крюйс-расстоянию.Метод определения места судна в море по крюйс-расстоянию не очень распространён в яхтинге, как и, по правде говоря, все остальные «крюйсы». Тем более, что полученная в результате точка не является, строго говоря, обсервованной. Она является счислимо-обсервованной. Его, теоретически, используют, когда есть возможность измерить расстояние, а вот пеленг — нет. Например, если неисправен компас. (Хотя, в наше время такую ситуацию в яхтинге представить себе нелегко). Но разберём и его.
В навигационном методе определения места судна в море по крюйс-расстоянию измеряют дистанцию до ориентира, а потом, через определённое время, снова дистанцию до этого же ориентира. Соответственно, на каждый момент измерений замечают время T1, Т2 и отсчёт лага OЛ1 и OЛ2. Ну и выполняют построения на карте, а именно:
1) Из ориентира проводят линию, параллельную проложенной на карте линии пути яхты.
2) На полученной линии в направлении пути откладывают расстояние, пройденное яхтой по лагу от момента первых измерений до момента вторых измерений (Sл). Его, как всегда, высчитывают по формуле: Sл = РОЛ = OЛ2 — ОЛ1 . Это, если у лага нет поправки. А если поправка лага есть, то: Sл= РОЛ * (1+ΔЛ/100) . Получают точку В.
3) Из полученной в результате точки на параллельной пути судна линии, отложенной от ориентира (точки В), откладывают расстояние, полученное в результате первых измерений (Д1).
4) Из центра самого ориентира откладывают дистанцию, полученную в результате вторых измерений (Д2).
5) В пересечении Д1 и Д2 получаем счислимо-обсервованное место своего судна.
Для лучшей эффективности этого навигационного метода определения места судна в море следует выбирать промежуток времени между наблюдениями таким, чтобы дуги окружностей (с радиусами Д1 и Д2) пересекались под углом, большим, чем 30°. Ясно, что положение нашего ориентира и точка В должны находиться под углом, большим 30° относительно яхты.
На этом закончим. А в следующей статье рассмотрим навигационные методы определения места судна в море по пеленгу и дистанции.
Если в видимости судна имеется только один навигационный ориентир, который нанесен на путевую карту, то определить место судна можно по разновременным наблюдениям одного и того же навигационного ориентира – способом «крюйс-пеленг».
Рис. 13.7. Способ «крюйс-пеленг»
Для определения места судна таким способом необходимо (рис. 13.7):
1.→ Измерить компасный пеленг на навигационный ориентир А (КП1), записать время (Т1) и отсчет лага (ОЛ1). На это время (Т1) нанести на путевую карту счислимое место судна (т. а).
2.→ Через определенное время (пеленг на ориентир А должен измениться на угол не менее чем на
30°) в момент времени (Т2) при отсчете лага (ОЛ2) измерить еще раз компасный пеленг на ориентир А (КП2).
3.→ Рассчитать значение ИП2 = КП2 + К и провести его на навигационной карте от места ориентира А (ОИП2 = ИП2 ± 180°).
4.→ Рассчитать расстояние, которое прошло судно за время между измерениями пеленгов: SЛ = КЛ
· (ОЛ2 – ОЛ1) или S = V · (Т2 – Т1).
5.→ Нанести на навигационную карту счислимое место судна на момент измерения КП2 (т. в).
6.→ От места ориентира (т. А) проложить линию параллельную линии пути судна и отложить по ней рассчитанное расстояние SЛ ( и
и  ) получим вспомогательную точку (т. В).
) получим вспомогательную точку (т. В).
7.→ Рассчитать значение ИП1 = КП1 + К и проложить его от т. В (ОИП1 = ИП1 ± 180°).
8.→ В точке пересечения пеленгов (ИП1 и ИП2) условным знаком ( ) нанести на путевую карту
) нанести на путевую карту
счислимо-обсервованное место, рядом с ним подписать  .
.
9.→ Обозначить на карте невязку (С), определить ее направление (52°) и величину (1,2 мили).
10.→ Оформить запись в судовом журнале.
Нанести счислимо-обсервованное место судна на путевую МНК можно и так (рис. 13.7):
1.− рассчитанные значения ИП1 (ОИП1) и ИП2 (ОИП2) проложить от места ориентира (т. А);
2.− рассчитать значение расстояния [SЛ = (ОЛ2 – ОЛ1) · КЛ] пройденного судном за время между замерами пеленгов (КП1 и КП2);
3.− с помощью параллельной линейки и циркуля-измерителя вместить рассчитанное значение «SЛ» между линиями пеленгов ( = а′в′ и
= а′в′ и  а′в′), тогда:
а′в′), тогда:
i.т. «а′» → место судна на время замера КП1;
ii.т. «в′» → счислимо-обсервованное место судна на время замера КП2.
При определении места судна способом «крюйс-пеленг» необходимо стремиться к тому, чтобы изменение пеленга на ориентир было не менее чем 30° и, в то же время, чтобы промежуток времени между наблюдениями был как можно меньше. Лучше всего, когда ориентир находится сравнительно на небольшом удалении от судна, а курсовой угол на него близок к траверзному.
Способ «крюйс-пеленга» невозможен в исполнении, если:
1.→ ориентир находится на острых носовых (кормовых) курсовых углах;
2.→ судно не имеет хода;
3.→ при небольшой скорости судна и значительном расстоянии до ориентира.
13.2.Определение места судна по двум горизонтальным углам трех береговых
ориентиров
13.2.1. Сущность способа
Определение места судна по двум одновременно измеренным горизонтальным углам между направлениями на три навигационных ориентира является одним из наиболее точных визуальных способов определения места.
Для определения места судна по двум горизонтальным углам необходимо иметь на берегу в поле зрения три хорошо видимых навигационных ориентира (маяки, знаки, трубы, антенны и т.д.), которые нанесены на путевую карту (рис. 13.8).
Рис. 13.8. Определение места судна по двум горизонтальным углам
Для реализации данного способа:
1)→ На судне одновременно измеряются два горизонтальных угла между ориентирами:
 α′ – между ориентирами А и В;
α′ – между ориентирами А и В;
 β′ – между ориентирами В и С.
β′ – между ориентирами В и С.
Измерение углов производится с помощью навигационного секстана. Величина измеренного с помощью секстана угла (с точностью до 0,1′) есть отсчет секстана (ОС).
2) → Отсчеты секстана, соответствующие измеренным углам ( α′ → ОС1;
α′ → ОС1;  β′ → ОС2), исправляются поправкой секстана (i + S), где i – поправка индекса секстана (определяется наблюдателем); S – инструментальная поправка секстана (выбирается из формуляра СНО по значению
β′ → ОС2), исправляются поправкой секстана (i + S), где i – поправка индекса секстана (определяется наблюдателем); S – инструментальная поправка секстана (выбирается из формуляра СНО по значению
ОС1 и ОС2).
3) → Измеренные и исправленные общей поправкой секстана (i + S) углы (  α = ОС1 + (i + S) и
α = ОС1 + (i + S) и  β = ОС2 + (i + S)) являются навигационными параметрами, которым соответствует навигационная изолиния в виде окружности (изогона).
β = ОС2 + (i + S)) являются навигационными параметрами, которым соответствует навигационная изолиния в виде окружности (изогона).
Углу α соответствует окружность, проходящая через ориентиры А и В и вмещающая угол α =  АDВ. В момент измерения угла α – судно должно находиться на этой окружности.
АDВ. В момент измерения угла α – судно должно находиться на этой окружности.
Углу β соответствует окружность, проходящая через ориентиры В и С и вмещающая угол β =  ВЕС. В момент измерения угла судно должно находиться и на этой окружности.
ВЕС. В момент измерения угла судно должно находиться и на этой окружности.
Одновременное нахождение судна на двух окружностях возможно лишь в их общей точке, то есть в точке К.
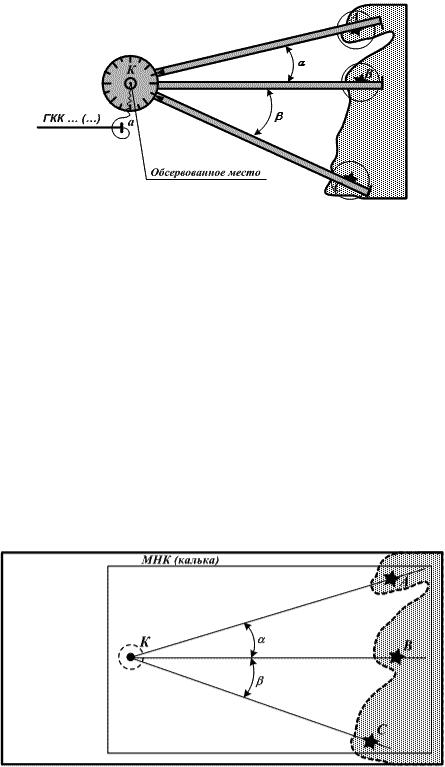
Кроме того, эта точка «К» является общей вершиной измеренных углов, а сами углы при этом имеют одну общую сторону, которая проходит через средний ориентир В.
Таким образом, точка «К» и будет местом судна на момент измерения горизонтальных углов
α и β (вторая точка пересечения окружностей, вмещающих измеренные углы α и β, не может быть обсервованным местом судна, так как она совпадает с местом ориентира В и не является общей вершиной углов α и β).
Следовательно, для определения места судна по двум горизонтальным углам достаточно найти на путевой карте точку, которая является общей вершиной измеренных углов.
13.2.2. Способы нанесения обсервованного места судна на путевую карту а) Нанесение обсервованного места судна на путевую карту с помощью протрактора.
Рис. 13.9. Нанесение обсервованного места на карту с помощью протрактора
Протрактор (pro – перед, tractor – тянущий) – специальный навигационный прибор, при помощи которого можно построить два угла с общей вершиной в центре протрактора.
Протрактор состоит из азимутального круга, разбитого на градусы от 0° до 180° вправо и влево, и трех линеек. Средняя линейка прикреплена к азимутальному кругу и неподвижна; край ее точно совпадает с делением азимутального круга 0°.
Крайние линейки подвижны. Их можно устанавливать под любым углом к краю средней линейки, совпадающей с нулевым делением азимутального круга. При помощи индексов на подвижных линейках и отсчетных барабанов, углы устанавливаются с точностью ±0,5′ (цена деления отсчетных барабанов 1,0′).
Для получения обсервованного места судна на путевой карте – на протракторе устанавливают значения измеренных и исправленных углов α и β.
Протрактор (рис. 13.9) накладывается на путевую карту вблизи счислимого места судна (т. а) так,
чтобы срезы (края) всех трех линеек прошли через места навигационных ориентиров А, В и С. В центре протрактора и будет обсервованное место судна (К), которое отмечается на карте уколом иглы протрактора.
б) Нанесение обсервованного места судна на путевую карту с помощью листа кальки.
Рис. 13.10. Нанесение обсервованного места на карту с помощью листа кальки
В тех случаях, когда при определении места судна по двум горизонтальным углам по каким-либо причинам отсутствует протрактор, применяется лист кальки (рис. 13.10), посредине которого проводится произвольная прямая линия (КВ), которая принимается за общую сторону измеренных углов α и β. При этой точке (т. К), с помощью штурманского транспортира, строятся измеренные и исправленные углы α и β (  α =
α =  АКВ,
АКВ,  β =
β =  ВКС). [Точка К на линии КВ берется произвольно, но, как правило, внизу и посередине листа кальки].
ВКС). [Точка К на линии КВ берется произвольно, но, как правило, внизу и посередине листа кальки].
Для получения обсервованного места судна на путевой карте: → кальку, с нанесенными на нее углами α и β, наложить на путевую карту так (как и в примере с протрактором), чтобы линии на кальке, обозначающие стороны углов α и β совпали с ориентирами А, В и С, а это возможно только
водном, вполне определенном положении.
Вточке К находится обсервованное место судна, которое отмечается на путевой карте уколом иглы циркуля через кальку в точке К и, после снятия кальки →  .
.
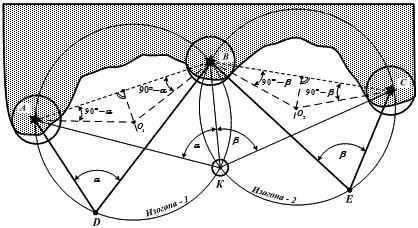
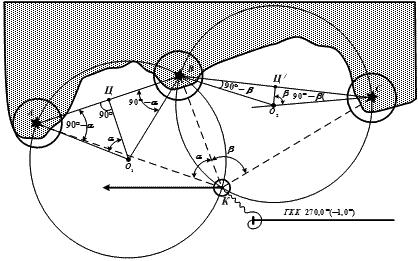
в) Нанесение обсервованного места судна на путевую карту путем графического построения навигационных изолиний.
Для получения обсервованного места судна на путевую карту таким способом необходимо (рис.
13.8и рис. 13.11):
1.→ на путевой МНК соединить прямой линией (АВ и ВС) навигационные ориентиры между которыми измерялись горизонтальные углы (ор. А – ор. В → α; ор. В – ор. С →
α; ор. В – ор. С →  β);
β);
Рис. 13.11. Нанесение обсервованного места на карте графическим построением
2.→ найти центры этих, соединяющих ориентиры, отрезков:
•т. Ц → отрезка АВ;
•т. Ц′ → отрезка ВС.
3.→ из полученных точек (т. Ц и т. Ц′) провести линии (в сторону моря) перпендикулярные линиям, соединяющим эти ориентиры: – 
 AB и –
AB и – 
 BC;
BC;
4.→ от т. А (или от т. В) относительно линии АВ отложить в сторону моря значение угла (90° – α),
аот т. В (или от т. С) относительно линии ВС отложить (в сторону моря) значение угла (90° – β);
5.→ пересечение линий АО1 (или ВО1) и ВО2 (или СО2) с перпендикулярами, проведенными из точек Ц и Ц1 и даст положение центров навигационных изолиний (изогон), соответствующих значениям навигационных параметров (горизонтальным углам α → т. О1 и β → т. О2);
6.→ с помощью циркуля провести навигационные изолинии:
•для  α: иглу в т. О1 и R1 = О1А (О1В);
α: иглу в т. О1 и R1 = О1А (О1В);
•для  β: иглу в т. О2 и R2 = О2В (О2С).
β: иглу в т. О2 и R2 = О2В (О2С).
7.→ в точке пересечения навигационных изолиний (т. К) обозначить обсервованное место судна (
 ), невязку (С) и оформить запись в судовом журнале.
), невязку (С) и оформить запись в судовом журнале.
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО КРЮЙС-ПЕЛЕНГУ (ОБЩИЙ СЛУЧАЙ)
В практике судовождения часто бывают случаи, когда в видимости наблюдателя на судне имеется только один ориентир, расстояние до которого невозможно определить по различным причинам. В этом случае определяют место судна по пеленгу одного ориентира с учетом элементов счисления (курса и пройденного расстояния).
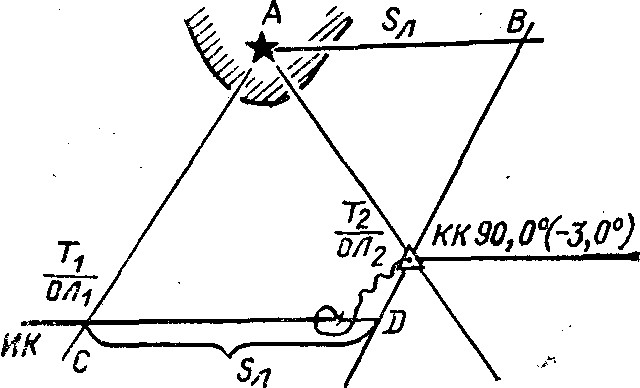
Рис. 60. Определение места судна по крюйс-пеленгу
Место судна может быть определено путем вмещения пройденного по лагу расстояния между проложенными на карте пеленгами.
Способ, когда в определении места судна применяются линии положения — пеленги и пройденное по лагу расстояние, — называется крюйс-пеленгом и полученное место называется счислимо- обсервованным
Проложив на карте истинные пеленги и рассчитав пройденное расстояние по показаниям лага, вмещают пройденное расстояние между пеленгами параллельно истинному курсу.
Порядок работы состоит в следующем. Выбрав на берегу хорошо видимый ориентир А (рис. 60), берут по компасу на него пеленг и одновременно замечают момент по часам Т1 и отсчет лага ОЛ1 Когда пеленг ориентира изменится более чем на 30°, берут его второй пеленг и замечают момент по часам Т2 и отсчет лага ОЛ2.
Схемы расчетов при выполнении способа следующие:
Т1/ОЛ1
Маяк
ОИП= ОКП+ΔМК
Т2/ОЛ2
Маяк
ОИП= ОКП+ΔМК
РОЛ=ОЛ2-ОЛ1
Sл=РОЛ*Кл
Здесь Kл — коэффициент лага.
Рассчитанные пеленги прокладывают на карте (см. рис. 60). Из точки пересечения линии ИК с первым пеленгом (точка С) по линии ИК откладывают пройденное расстояние Sл. Из конца полученного отрезка (точки D) проводят линию, параллельную первому пеленгу, до пересечения со вторым пеленгом. Место судна будет в пересечении этих линий.
Применяется и другой прием для вмещения между пеленгами пройденного расстояния Sл.
От ориентира А параллельно истинному курсу ИК прокладывают прямую линию и на ней от ориентира A откладывают пройденное расстояние. Из конца полученного отрезка (из точки В) параллельно первому пеленгу проводят линию до пересечения со вторым пеленгом. Местом судна будет точка пересечения этих двух линий.
Счислимо-обсервованное место судна на карте обозначается треугольником с точкой в месте пересечения линий и со сторонами 3—4 мм.
Точность полученного места судна будет зависеть от точности взятия пеленгов и точности расчета пройденного расстояния между ориентирами.
 ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ ВИЗУАЛЬНЫМИ МЕТОДАМИ
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ ВИЗУАЛЬНЫМИ МЕТОДАМИ
Учет перемещения судна путем ведения графического счисления не является достаточно точным методом. Для уточнения своего положения судоводитель
должен систематически определять место судна по наблюдениям различных ориентиров, положение которых известно. Место, полученное путем обработки результатов таких наблюдений, называется обсервованным. Если обсервованная точка признается надежной, дальнейшая прокладка ведется от этой точки.
Несовпадение обсервованной и счислимой точек называют невязкой. Значение и направление невязки рассчитывают при каждой обсервации, так как анализ вызвавших ее причин дает возможность установить, какие именно ошибки могли быть допущены в принятых к учету элементах счисления. Все величины, которые измеряют с целью определить обсервованное место судна (пеленги, расстояния, горизонтальные и вертикальные углы), называют навигационными параметрами.
По измеренным навигационным параметрам рассчитывают и прокладывают на карте изолинии или заменяющие их линии положения. Навигационной изолинией называют линию равных значений навигационного параметра (рис 40).
Точка пересечения двух таких изолиний и будет местом судна. На практике всю изолинию не строят, тем более, что на меркаторских картах она часто имеет вид сложной кривой, а заменяют её линией положения – отрезком прямой, касательной к изолинии вблизи счислимого места.
При визуальных способах определения места судна для наблюдений используют нанесенные на карту хорошо видимые и опознанные береговые и плавучие маяки, огни, неосвещаемые знаки, башни, церкви, а также различные естественные ориентиры: мысы, вершины гор, скалы и т.д. Не следует использовать для обсерваций буи, вехи и другие знаки плавучего ограждения, так как они могут быть снесены со своих штатных мест. Для указания на карте места судна, полученного по обсервациям, применяют условные обозначения:
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГАМ ДВУХ ОРИЕНТИРОВ
На берегу выбирают два хорошо видимых и опознанных ориентира А и В (рис. 41) с таким расчетом, чтобы угол между направлениями на них был по возможности близким к 90′, но, во всяком случае, не меньше 30 и не больше 150°. Берут по компасу пеленги ориентиров. Время и ол замечают в момент Т вторых наблюдений. Компасные пеленги исправляют поправкой компаса в истинные и прокладывают на карте. При незначительных случайных ошибках наблюдений и уверенности в правильности учитываемой поправки компаса точность определения места судна по двум пеленгам вполне удовлетворительная. Если угол между направлениями на ориентиры меньше 30 или больше 150°, то к полученному обсервованному месту следует относиться с осторожностью.
Определение места судна по пеленгам двух ориентиров

ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГАМ ТРЕХ ОРИЕНТИРОВ
Три линии положения, проложенные на карте, пересекаются в одной точке в том случае, если наблюдения, вычисления и прокладка не содержали никаких ошибок. На практике линии пеленгов часто образуют треугольник, называемый треугольником погрешностей (авс на рис. 42). Причинами его появления могут быть:
промахи при опознании ориентиров или при взятии отсчетов по картушке компаса;
случайные ошибки пеленгования. При нормальных условиях наблюдений они невелики и не приводят к появлению большого треугольника погрешности;
ошибки от неодновременного взятия пеленгов. Эти ошибки проявляют себя при скорости судна, большей 15-18 уз, и небольших (2-3 мили) расстояниях до ориентиров.
Для установления причин появления треугольника погрешностей проводят анализ обсервации. Промахи в наблюдениях сразу же обнаруживаются из-за появления значительного треугольника погрешностей. Чтобы убедиться, что причиной этого не является промах, измерения пеленгов повторяют. Если после повторных наблюдений треугольник не уменьшился, причиной его появления следует считать значительную ошибку в поправке компаса. Следует изменить ее на 2-4° в ту или другую сторону.
Проложив пеленги, исправленные новой поправкой, получают на карте второй треугольник погрешности (a’b’c’ на рис. 42). Если измененное значение поправки компаса оказалось ближе к ее истинному значению, то второй треугольник уменьшится по сравнению с первым и наоборот.
Соединив сходные вершины этих треугольников отрезками прямых, получают в их пересечении точку М (см. рис. 42), которая является обсервованным местом судна, свободным от влияния систематической ошибки в МК.
Пользоваться описанным приемом для нахождения верного места судна следует только в том случае, если значение сторон треугольника погрешности 0,5 мили и более. Если его стороны меньше указанного значения, то вероятное место судна принимают в центре треугольника, относя причину его возникновения к случайным ошибкам.
Практическое выполнение. Заблаговременно выбирают на берегу три ориентира с расчетом, чтобы углы между их пеленгами были от 60 до 120°. В быстрой последовательности измеряют пеленги каждого ориентира.
При взятии третьего пеленга замечают время и ол. Исправляют пеленги поправкой компаса и прокладывают на карте, принимая место судна в точке их пересечения.
При получении треугольника погрешности находят верное место судна, как указывалось выше. Снимают с карты координаты обсервованного места, а также направление и невязку. Эти данные записывают в судовой журнал. Способ определения места судна по трем пеленгам является одним из наиболее точных в судовождении.
Определение места судна по пеленгам трех ориентиров

ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ДВУМ ГОРИЗОНТАЛЬНЫМ УГЛАМ
Если на берегу имеются три ориентира А, В и С (см. рис. 43), то с судна могут быть одновременно измерены два горизонтальных угла: а – между ориентирами А и В и в – между В и С.
В результате будут получены две окружности – изолинии, в одной из точек пересечения которых (точка М) находится судно. На практике окружности на карту не наносят, а для нахождения места судна используют кальку (рис.44). Место судна получают, делая в точке М нажим карандашом или укол циркулем.
Случай неопределенности. Определение места судна по двум горизонтальным углам оказывается невозможным, если в момент измерения углов судно будет находиться на окружности, проходящей через все три ориентира А, В, С (рис. 45).
Случая неопределенности не будет, если средний ориентир расположен ближе к судну, чем крайний; все три ориентира расположены на одной прямой; все три ориентира находятся на одинаковом расстоянии от судна.
Практическое выполнение. Углы между ориентирами, как правило, измеряют секстаном. Углы между ориентирами можно определить и при помощи компаса.
Для этого в быстрой последовательности берут пеленги трех ориентиров, а затем вычисляют разности между отсчетами смежных компасных пеленгов: левого и среднего, среднего и правого ориентиров. Этим приемом пользуются, в частности, если поправка компаса ненадежна.
Определение места судна по двум горизонтальным углам относится к числу наиболее точных визуальных способов.
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И ГОРИЗОНТАЛЬНОМУ УГЛУ
Этот прием является разновидностью способа определения места судна по двум пеленгам. Его применяют, когда один из двух ориентиров почему-либо не виден наблюдателю, расположенному у компаса, например, закрыт надстройкой. В этом случае измерения обычно проводят два наблюдателя. Первый располагается так, чтобы видеть оба ориентира, второй находится у компаса.
Первый наблюдатель секстаном измеряет горизонтальный угол между ориентирами, а второй по команде, подаваемой в момент измерения угла, берет пеленг. Одновременно замечают время и ол.
Отсчет компасного пеленга исправляют ΔМК. Для получения истинного пеленга на второй ориентир к первому пеленгу прибавляют измеренный угол.
Угол берется со знаком плюс (“+”), если он был измерен вправо от линии измеренного пеленга, и со знаком минус (“-“), если влево. Место судна получают в пересечении линий двух истинных пеленгов. Точность обсервации может быть принята равной точности определения места по двум пеленгам.
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО КРЮЙС-ПЕЛЕНГУ
Если с движущегося судна виден только один ориентир, расстояние до которого не может быть измерено, то для определения места применяют способ крюйс-пеленга. При этом ориентир пеленгуют 2 раза в различные моменты времени, место судна получают на момент вторых наблюдений. На карте счислимо-обсервованное место обозначают треугольником.
Наблюдения, вычисления и прокладку при определении места судна по крюйс-пеленгу выполняют в следующем порядке. Берут первый компасный пеленг ориентира, замечая время и ол. Когда направление на ориентир изменится на 30-40°, берут второй пеленг и вновь замечают время и ол.
Компасные пеленги исправляют поправкой компаса и рассчитывают пройденное судном расстояние между измеренными пеленгами. Линии истинных пеленгов прокладывают на карте (см. рис. 46). От точки пересечения первого пеленга с линией ИК. откладывают по курсу отрезок Sл, через конец которого проводят линию, параллельную первому пеленгу.
В точке пересечения этой линии со вторым пеленгом получают счислимо-обсервованное место судна на момент вторых наблюдений. Если счисление переносят в полученную точку, то снимают ее координаты, величину и направление невязки, которые записывают в судовой журнал. Если при счислении учитывали дрейф, то Sл откладывают не по линии ИК, а по линии пути судна при дрейфе (см. рис.), а при течении откладывают Sл по линии пути при течении.


Точность счислимо-обсервованного места зависит от случайных ошибок пеленгования, соответствия принятой поправки компаса ее действительному значению и от ошибок счисления за время между моментами взятия пеленгов. Причиной появления ошибок счисления являются погрешности в показаниях компаса и лага, а также неточный учет дрейфа и течения.
Для повышения точности стараются взять второй пеленг как можно быстрее после первого, однако не ранее того момента, когда он не изменится на 30-40°. При этом пеленгование ведут с таким расчетом, чтобы второй пеленг ориентира был взят вблизи его траверза.
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И РАССТОЯНИЮ
Определение расстояния до ориентира. Расстояние до ориентира в настоящее время, как правило, определяют с помощью РЛС. В качестве резервного может быть рассмотрен способ определения расстояния по вертикальному углу, измеренному секстаном.
Определить расстояние по вертикальному углу можно, если известна высота ориентира над уровнем моря или его высота над основанием. Предположим, что, находясь в точке М, наблюдатель видит ориентир, высота которого h над уровнем моря известна (см. рис. 48). Измерив вертикальный угол а, можно рассчитать расстояние D до ориентира. При этом высотой глаза наблюдателя е можно пренебречь. Тогда из прямоугольного треугольника M’OA получаем:
D = h ctg а.
Выражая h в метрах иD в милях, получим:
D = (h /1852) ctg а
Перед измерением вертикального угла подготавливают секстан к наблюдениям, определяют поправку индекса. Из навигационного пособия выбирают высоту ориентира над уровнем моря или от основания.
Измеренный угол исправляют поправкой индекса и инструментальной поправкой (t + s). Точность измерения расстояния рассматриваемым способом невелика. Возможные ошибки связаны с колебаниями уровня моря и значительное удаление ориентира от береговой черты.
Существует также проверенный практикой способ определения расстояния с помощю школьной линейки (см. рис). Если известны высота ориентира Н (м), длина вытянутой руки l (см) и видимая высота ориентира hв (см), наблюдаемая на шкале линейки на вытянутой руке, то расстояние от судна до ориентира D (мили) будет равно:
D = Н (l / hв) /1852
Определение места судна по пеленгу и расстоянию. Этот способ применяют, если с судна виден только один ориентир А, расстояние до которого может быть определено по измеренному вертикальному углу либо при помощи РЛС.
Изолиниями, в пересечении которых принимается обсервованное место, являются проложенная на карте линия истинного пеленга ориентира АР и дуга окружности (засечка), проведенная радиусом, равным измеренному расстоянию d (рис. 49).
Для уменьшения ошибки от перемещения судна первым измеряют вертикальный угол, а затем пеленг на момент времени Т. Для повышения точности обсервации следует выбирать ориентир, расположенный ближе к судну. При уверенности в принятой поправке компаса обсервованное место судна можно считать достаточно надежным.


Определение места судна по двум расстояниям. Аналогично определяется место по двум расстояниям. При помощи РЛС, либо измеряя секстаном вертикальные углы, измеряют расстояние до двух ориентиров, причём момент времени засекается при измерении расстояния к ориентиру, который расположен под меньшим углом к ДП судна, и откладывают засечки дуг окружностей на карте, находя их пересечение, соответствующее месту судна.
ОПОЗНАНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ В МОМЕНТ ОТКРЫТИЯ ОРИЕНТИРА, ПО ПЕЛЕНГУ И ГЛУБИНЕ
Опознанное место в отличие от обсервованного является ориентировочным. Судоводитель не должен полагаться на него в своих расчетах, однако его необходимо принимать во внимание, особенно если оно находится ближе к опасности, чем счислимая точка.

Опознание места по пеленгу в момент открытия ориентира применяют при подходе к берегу, когда на судне продолжительное время не имели обсерваций. Заблаговременно рассчитывают дальность видимости ориентира и ведут наблюдение в направлении, по которому он должен открыться.
В момент обнаружения ориентира берут его компасный пеленг, замечают время и ол. Исправленный пеленг прокладывают на карте. Место судна получают на линии пеленга, отложив по нему рассчитанное расстояние. Точность опознанного места во многом зависит от состояния атмосферы.
Опознание места судна по пеленгу и глубине применяют, если с судна виден только один ориентир, а глубины в районе плавания изменяются равномерно. Берут компасный пеленг ориентира и одновременно измеряют глубину эхолотом. Место судна получают на пересечении линии исправленного пеленга с отрезком изобаты, соответствующей измеренной глубине. Изобату наносят, ориентируясь на отметки глубин на карте. Точность опознанного места будет тем выше, чем равномернее и ближе одна к другой изобаты.
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 29 августа 2019 года; проверки требуют 44 правки.
У этого термина существуют и другие значения, см. Пеленг.

Магнитный пеленг с самолёта на объект (угол QDM) и его отличие от истинного. TN, MN — истинный и магнитный меридиан, соответственно. Угол QDR является пеленгом с объекта на самолёт
Пе́ленг в навигации — процесс определения углов между северным направлением меридиана и линией из точки наблюдения на объект; измеряется в горизонтальной плоскости по часовой стрелке от нуля (направление на север, N) до полной дуги окружности (0°—360° или 0—32 румб).
Пеленг на объект для краткости может называться «пеленгом объекта». То есть для измерения пеленга необходимы две точки — наблюдатель и объект, а также направление на север[1].
Процесс пеленга[править | править код]
Пеленг — сложный процесс определения местоположения и состоит из:
- Определения направления на север (ориентация)
- Наведения на север
- Взятие углового отсчёта
- Наведения на объект
- Взятие углового отсчёта
Разновидности[править | править код]
По методу определения исходного направления[править | править код]
В зависимости от используемого меридиана, пеленг может быть:
- Истинный — отсчитывается от северного направления истинного (географического) меридиана, то есть направления на Северный полюс
- Магнитный — отсчитывается от северного направления магнитного меридиана, то есть от направления силовых линий магнитного поля (магнитного меридиана) в данной точке поверхности Земли[2]
- Дирекционный — отсчитывается от северного направления осевого меридиана зоны прямоугольных координат и направлением на ориентир. Дирекционные углы направлений могут быть измерены с точностью порядка 30—60 угловых минут по топографической карте с помощью транспортира. При измерениях дирекционных углов по топографической карте можно использовать следующее определение дирекционного угла, дирекционным углом ɑ называется горизонтальный угол, измеряемый по ходу часовой стрелки от 0° до 360°, между северным направлением вертикальной линии километровой сетки плоских прямоугольных координат и направлением на ориентир
- Гирокомпасное — отсчитывается от направление максимально приближено к истинному. Измеряется гирокомпасом[3]. При гироскопическом способе ориентирования с помощью гирокомпаса определяют истинный (астрономический) азимут ориентирного направления. Азимут ориентирного направления с помощью гирокомпаса определяется по двум, трем (четырем) точкам реверсии. Увеличение числа точек реверсии до трех (четырех) обеспечивает контроль и повышает точность определения[4]
По методу измерения (взятия отсчета)[править | править код]
По способу взятия отсчета пеленг может быть:
- Компасный или буссольный — отсчитывается от компасного норда, то есть от направления, указываемого компасом. Так как компас любой конструкции имеет поправку, это направление отличается как от истинного, так и от магнитного
- Визуальный (оптический) — измеряется пеленгаторами, курсоуказателями, визирами, перископами и им подобными инструментами. Предполагает, что объект (внешний ориентир) находится в прямой видимости наблюдателя. Точность оптического пеленга определяется точностью применяемого инструмента
- Гидролокационный — направление на источник звука в воде. Измеряется гидролокатором
- Тепловой — направление на инфракрасный источник. Измеряется тепловым визиром
- Радиопеленг — в качестве объекта выступает радиопередатчик. Измеряется радиопеленгатором. Его дальность может быть гораздо больше прямой видимости. Поэтому на точность начинает влиять кривизна Земли. Радиопеленг является ортодромическим, поскольку радиоволны распространяются по кратчайшей линии. Для нанесения пеленга на карту возникает необходимость в поправке (ψ = Лок. П. − Орт. П.) для перевода его в локсодромический
В случае меркаторской карты ортодромическая поправка имеет вид:

и вычисляется по средней широте φср:

и по разности долгот Δλ:

где φс, λс — координаты счислимой точки, а φр, λр — координаты источника (радиомаяка).
Пеленг и азимут[править | править код]

Взятие пеленга с помощью пеленгатора, установленного на репитере гирокомпаса
В отличие от азимута, допускающего вариации отсчёта, пеленг всегда измеряется от направления на север, по часовой стрелке и на полную дугу окружности. Таким образом пеленг соответствует круговому азимуту[5].
Относительный пеленг[править | править код]
В англоязычных пособиях вместо понятия «курсовой угол» вводится разновидность пеленга под названием «относительный пеленг» (англ. relative bearing).
Примечания[править | править код]
- ↑ Станюкович К. М. Словарь морских терминов, встречающихся в рассказах
- ↑ «Навигация и лоция» Д. И. Рульков, Москва, Транспорт, 1973
- ↑ Навигация. Первые шаги. Курс, пеленг. | NavLib. Дата обращения: 26 сентября 2019. Архивировано 26 сентября 2019 года.
- ↑ «Дирекционный угол». Дата обращения: 13 октября 2019. Архивировано 10 января 2022 года.
- ↑ Сферические координаты светил. poznayka.org. Дата обращения: 27 декабря 2018. Архивировано 27 декабря 2018 года.
Литература[править | править код]
- Справочник вахтенного офицера. / Общ. ред. А. П. Проничкин. М., Военное издательство МО СССР, 1975.
- Военно-морской словарь / Чернавин В. Н.. — М.: Воениздат, 1989. — С. 307. — 511 с. — ISBN 5-203-00174-X.
