2.6.1 Определение передаточной функции
Преобразование
ДУ по Лапласу дает возможность ввести
удобное понятие передаточной функции,
характеризующей динамические свойства
системы.
Например,
операторное уравнение
3s2Y(s)
+ 4sY(s)
+ Y(s)
= 2sX(s)
+ 4X(s)
можно
преобразовать, вынеся X(s)
и Y(s)
за скобки и поделив друг на друга:
Y(s)*(3s2
+ 4s
+ 1) = X(s)*(2s
+ 4)
![]() .
.
Полученное
выражение называется передаточной
функцией.
Передаточной
функцией
называется отношение изображения
выходного воздействия Y(s)
к изображению входного X(s)
при нулевых начальных условиях.
![]() (2.4)
(2.4)
Передаточная
функция является дробно-рациональной
функцией комплексной переменной:
 ,
,
где
B(s) = b0
+ b1s
+ b2
s2
+ … + bm
sm
– полином
числителя,
А(s)
= a0
+ a1s
+ a2
s2
+ … + an
sn
– полином знаменателя.
Передаточная
функция имеет порядок, который определяется
порядком полинома знаменателя (n).
Из
(2.4) следует, что изображение выходного
сигнала можно найти как
Y(s)
= W(s)*X(s).
Так
как передаточная функция системы
полностью определяет ее динамические
свойства, то первоначальная задача
расчета АСР сводится к определению ее
передаточной функции.
2.6.2 Примеры типовых звеньев
Звеном
системы называется ее элемент, обладающий
определенными свойствами в динамическом
отношении. Звенья систем регулирования
могут иметь разную физическую природу
(электрические, пневматические,
механические и др. звенья), но описываться
одинаковыми ДУ, а соотношение входных
и выходных сигналов в звеньях описываться
одинаковыми передаточными функциями.
В
ТАУ выделяют группу простейших звеньев,
которые принято называть типовыми.
Статические и динамические характеристики
типовых звеньев изучены достаточно
полно. Типовые звенья широко используются
при определении динамических характеристик
объектов управления. Например, зная
переходную характеристику, построенную
с помощью самопишущего прибора, часто
можно определить, к какому типу звеньев
относится объект управления, а
следовательно, его передаточную функцию,
дифференциальное уравнение и т.д., т.е.
модель объекта. Типовые звенья Любое
сложное звено может быть представлено
как соединение простейших звеньев.
К
простейшим типовым звеньям относятся:
-
усилительное,
-
инерционное
(апериодическое 1-го порядка), -
интегрирующие
(реальное и идеальное), -
дифференцирующие
(реальное и идеальное), -
апериодическое
2-го порядка, -
колебательное,
-
запаздывающее.
1)
Усилительное звено.
 Звено
Звено
усиливает входной сигнал в К раз.
Уравнение звена у = К*х, передаточная
функцияW(s)
= К. Параметр К называется коэффициентом
усиления.
Выходной сигнал
такого звена в точности повторяет
входной сигнал, усиленный в К раз (см.
рисунок 1.18).
у = K.x.
При ступенчатом
воздействии h(t)
= K.
Примерами таких
звеньев являются: механические передачи,
датчики, безынерционные усилители и
др.
2)
Интегрирующее.
2.1)
Идеальное интегрирующее.
Выходная величина
идеального интегрирующего звена
пропорциональна интегралу входной
величины:
![]()
 ; W(s)
; W(s)
=
![]()
При подаче на вход
звена ступенчатого воздействия x(t) = 1
выходной сигнал постоянно возрастает
(см. рисунок 1.19):
h(t) = K.t.
Это
звено астатическое, т.е. не имеет
установившегося режима.
Примером
такого звена может служить емкость,
наполняемая жидкостью. Входной параметр
– расход поступающей жидкости, выходной
– уровень. Изначально емкость пуста и
при отсутствии расхода уровень равен
нулю, но если включить подачу жидкости,
уровень начинает равномерно увеличиваться.
2.2)
Реальное интегрирующее.
П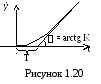 ередаточная
ередаточная
функция этого звена имеет вид
W(s)
=
![]() .
.
Переходная
характеристика в отличие от идеального
звена является кривой (см. рис. 1.20):
h(t)
= K.(t
– T)
+ K.T.e
–t/T.
Примером
интегрирующего звена является двигатель
постоянного тока с независимым
возбуждением, если в качестве входного
воздействия принять напряжение питания
статора, а выходного – угол поворота
ротора. Если напряжение на двигатель
не подается, то ротор не двигается и
угол его поворота можно принять равным
нулю. При подаче напряжения ротор
начинает раскручиваться, а угол его
поворота сначала медленно вследствие
инерции, а затем быстрее увеличиваться
до достижения определенной скорости
вращения.
3)
Дифференцирующее.
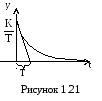
3.1)
Идеальное дифференцирующее.
Выходная величина
пропорциональна производной по времени
от входной:
![]() ; W(s)
; W(s)
= K*s
При ступенчатом
входном сигнале выходной сигнал
представляет собой импульс (-функцию): h(t)
= K.(t).
3.2)
Реальное дифференцирующее.
 Идеальные
Идеальные
дифференцирующие звенья физически не
реализуемы. Большинство объектов,
которые представляют собой дифференцирующие
звенья, относятся к реальным дифференцирующим
звеньям, передаточные функции которых
имеют вид
W(s)
=
![]() .
.
Переходная
характеристика: ![]() .
.
Пример
звена: электрогенератор. Входной параметр
– угол поворота ротора, выходной –
напряжение. Если ротор повернуть на
некоторый угол, то на клеммах появится
напряжение, но если ротор далее не
вращать, напряжение снизится до нуля.
Резко упасть оно не может вследствие
наличия индуктивности у обмотки.
4) Апериодическое
(инерционное).
Этому звену
соответствуют ДУ и ПФ вида
![]() ; W(s)
; W(s)
=
![]() .
.
Определим характер
изменения выходной величины этого звена
при подаче на вход ступенчатого
воздействия величины х0.
Изображение
ступенчатого воздействия: X(s)
=
![]() .
.
Тогда изображение выходной величины:
Y(s)
= W(s)
X(s)
=
![]()
![]()
= K
x0
![]() .
.
Разложим дробь
на простые:
![]()
=
![]()
+
![]()
=
![]()
=
![]()
–
![]()
=
![]()
–
![]()
Оригинал первой
дроби по таблице: L-1{![]() }
}
= 1, второй:
L-1{![]() }
}
=
![]() .
.
 Тогда
Тогда
окончательно получаем
y(t)
= K
x0
(1 –
![]() ).
).
Постоянная Т
называется постоянной
времени.
Большинство
тепловых объектов являются апериодическими
звеньями. Например, при подаче на вход
электрической печи напряжения ее
температура будет изменяться по
аналогичному закону (см. рисунок 1.22).
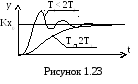
5)
Звенья второго порядка
Звенья имеют ДУ и
ПФ вида
![]()
 ,
,
W(s)
=
![]() .
.
При подаче на вход
ступенчатого воздействия амплитудой
х0
переходная кривая будет иметь один из
двух видов: апериодический (при Т1
2Т2)
или колебательный (при Т1 < 2Т2).
В
связи с этим выделяют звенья второго
порядка:
-
апериодическое
2-го порядка (Т1
2Т2), -
инерционное
(Т1 < 2Т2), -
консервативное
(Т1
= 0).
6)
Запаздывающее.
Если
при подаче на вход объекта некоторого
сигнала он реагирует на этот сигнал не
моментально, а спустя некоторое время,
то говорят, что объект обладает
запаздыванием.
Запаздывание
– это интервал времени от момента
изменения входного сигнала до начала
изменения выходного.
Запаздывающее
звено – это звено, у которого выходная
величина у в точности повторяет входную
величину х с некоторым запаздыванием
:
y(t)
= x(t
– ).
Передаточная
функция звена:
W(s)
= e–s.
Примеры
запаздываний: движение жидкости по
трубопроводу (сколько жидкости было
закачано в начале трубопровода, столько
ее выйдет в конце, но через некоторое
время, пока жидкость движется по трубе),
движение груза по конвейеру (запаздывание
определяется длиной конвейера и скоростью
движения ленты) и т.д.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Переход от передаточной функции к дифференциальному уравнению
Очевидно, что в обратном порядке можно от передаточной функции перейти к дифференциальному уравнению. Для этого нужно приравнять передаточную функцию, согласно ее определению, отношению изображения выхода к изображению входа, перейти к записи уравнения для изображений в строчку (П6.3.1) и затем от него перейти к уравнению для оригиналов (П6.1.1) или (П6.1.3).
Например, найдем дифференциальное уравнение для передаточной функции колебательного звена с передаточной функцией:
Для этого приравняем передаточную функцию отношению изображений Y(p)/X(p) и перепишем уравнение в строчку:
Теперь перейдем к оригиналам при нулевых начальных условиях. Формально заменим изображения Y(p), Х(р) на оригиналы y(t), x(t)
и переменную Лапласа р = а + ja — на оператор дифференцирова- d
ния р =—: dt
или в классической форме:
Дифференциальному уравнению соответствует характеристический полином
совпадающий с знаменателем передаточной функции. Чтобы записать характеристический полином или характеристическое уравнение по дифференциальному уравнению, надо в его левой части заменить производные соответствующими степенями переменной, причем y(t) заменяется на р° = 1.
Типовые звенья систем автоматического регулирования
По виду передаточной функции или дифференциального уравнения различают следующие звенья [4, 79, 82]:
1. Усилительное (безынерционное):
Размерность коэффициента усиления к определяется размерностями входной и выходной величины. В любом случае (к > 1 или к 0, а инверсию сигнала будем учитывать инвертирующим звеном с передаточной функцией W(p) = –1.
2. Идеальное интегрирующее:
Размерность коэффициента усиления [с– 1 ], а постоянной времени
3. Идеальное дифференцирующее:
4. Инерционное (апериоди ческое I порядка):
Размерности коэффициента усиления и постоянной времени ано- логичны размерностям в предыдущих звеньях.
Частота сопряжения со0 = |^с -1 J определяет полосу пропускания
Здесь ?, — коэффициент затухания (демпфирования); со0 — чд- стота сопряжения.
Корни характеристического уравнения рх2 =-^со0 ± у’со0 yjl-Z, 2 являются комплексно-сопряженными, что определяет колебательный характер переходного процесса. Отсюда и название звена.
Звено является частным случаем колебательного при % = 0.
В дифференциальном уравнении отсутствует член с первой производной, сответствующий вязкому трению и, следовательно, рассеиванию энергии. Примером консервативного звена является математический маятник (без трения и сопротивления воздуха). Выведенный из состояния равновесия маятник совершает незатухающие колебания. При этом кинетическая энергия переходит в потенциальную и обратно, а сумма энергий остается постоянной величиной.
Как по дифференциальному уравнению звена найти его передаточную функцию
Понятие линейного динамического звена
САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной совокупности отдельных элементов динамических звеньев.
Под динамическим звеном понимают в общем случае абстрактное устройство, имеющее вход и выход, и для которого задано уравнение, связывающее сигналы на входе и выходе, как это показано на рис. 1.
Подробное изучение свойств реальных объектов управления и систем автоматического управления приводит к описанию динамических звеньев в виде нелинейных дифференциальных уравнений. Но во многих случаях их можно линеаризовать, то есть заменить нелинейные уравнения линейными, приближенно описывающими процессы в системах. Тем самым осуществляется декомпозиция задач анализа и синтеза систем, то есть первоначально используют линейное представление, а затем осуществляют учет вносимых нелинейностями особенностей. Такому подходу способствует то, что, в большинстве случаев, нормально функционирующая система работает в режиме малых отклонений, при которых нелинейности не проявляются. В дальнейшем мы будем рассматривать преимущественно аппарат изучения линейных систем, а особенности систем других классов: нелинейных, импульсных, цифровых и стохастических, будут излагаться позднее в других учебных дисциплинах.
Если уравнение, связывающее сигналы и , линейно, то говорят о линейном динамическом звене
Уравнение линейного динамического звена имеет следующий общий вид:
где – постоянные коэффициенты, .
Использовать такое описание динамического звена в задачах анализа и синтеза систем и объектов управления не рационально, поэтому существуют и иные формы описания и представления динамических звеньев и систем в целом.
Подвергнем уравнение (1) преобразованию Лапласа, считая начальные условия нулевыми и заменяя оригиналы сигналов их изображениями по Лапласу
.
Используя теоремы преобразования Лапласа линейности и дифференцирования, получим операторное уравнение, связывающие изображения входного и выходного сигналов
Преобразуем уравнение (2) к следующему виду
Получим из (3) отношение изображений выходного и входного сигналов
Отношение (4) не зависит от изображений сигналов, определяется только параметрами самого динамического звена (), имеет вид дробно-рациональной функции.
Отношение изображений выходного и входного сигналов называют передаточной функцией динамического звена
.
,
называют характеристическим уравнением динамического звена, так как знаменатель передаточной функции это характеристический полином дифференциального уравнения, описывающего динамическое звено.
Определим передаточную функцию динамического звена по его принципиальной электрической схеме
По второму закону Кирхгоффа запишем уравнения описывающие схему
С учетом того, что
,
Получим операторные уравнения
Из второго уравнения выразим значение изображения тока
Подставим полученное выражение в первое уравнение системы
.
В итоге получаем искомую передаточную функцию
.
Графически передаточные функции динамического звена представляют в следующем виде:
Если известно изображение входного сигнала и передаточная функция динамического звена, всегда можно найти изображение выходного сигнала при нулевых начальных условиях
.(5)
В общем случае САУ состоит из множества динамических звеньев, сигналы с выходов звеньев могут суммироваться или вычитаться, суммироваться с внешними для САУ сигналами. Суммирование и вычитание изображений сигналов могут быть представлено графически с помощью суммирующих звеньев:
Показанная выше неоднозначность графического представления вычитания изображений на суммирующем элементе связана с различием в стандартах разных стран.
Используя графическое представление передаточных функций звеньев и суммирующие звенья, можно в графической форме представить операторные уравнения, описывающие САУ. Такое графическое представление операторных уравнений в ТАУ называют структурной схемой.
По математической модели объекта управления в форме системы дифференциальных уравнений определить структурную схему объекта.
Получим систему операторных уравнений, подвергнув исходную систему дифференциальных уравнений преобразованию Лапласа и заменив оригиналы изображениями,
Из первого уравнения системы операторных уравнений, которое описывает динамическое звено объекта управления, после преобразований получим
.
Тогда передаточная функция этого звена имеет вид
,
а выражение описывает суммирующее звено . Таким образом, получены два фрагмента структурной схемы
Из второго уравнения системы операторных уравнений, которое описывает динамическое звено объекта управления, после преобразований получим, вводя обозначение,
.
Тогда передаточная функция этого звена имеет вид
,
а выражение описывает суммирующее звено . Таким образом, получены еще два фрагмента структурной схемы
Соединим все фрагменты структурной схемы объекта управления, объединяя одноименные сигналы, либо разветвляя их с помощью точек ветвления , показанных на схеме. В результате получим
Временные характеристики динамического звена
Временной или импульсной характеристикой динамического звена называют реакцию звена на , обозначая ее как . При этом схема эксперимента имеет вид
Выясним, что представляет собой временная характеристика, то есть почему ее называют характеристикой динамического звена?
Для этого рассмотрим динамическое звено с передаточной функцией
В этом случае, в соответствии с (5), имеем
.
Получаем, что передаточная функция звена это изображение по Лапласу импульсной характеристики динамического звена. В свою очередь, импульсная характеристика может быть определена по передаточной функции
,
при использовании разложения в форму Хэвисайта и обратное преобразование Лапласа.
Знание импульсной характеристики позволяет определить реакцию динамического звена на сигнал любой формы.
Для динамического звена с передаточной функцией преобразуем (5), используя теорему об умножении изображений преобразования Лапласа,
,
а если легко получить , тогда
.
Переходной характеристикой или переходной функцией динамического звена называют реакцию динамического звена на , обозначая ее как . При этом схема эксперимента имеет вид
Для анализа переходной характеристики рассмотрим динамическое звено с передаточной функцией
В этом случае, в соответствии с (5), имеем
.
По теореме об интегрировании оригинала имеем
Переходная функция является интегралом по времени от импульсной характеристике и наоборот
.
Переходная характеристика динамического звена может быть определена по передаточной функции
Контрольные вопросы и задачи
Что такое линейное динамическое звено?
Как определить передаточную функцию линейного динамического звена?
Перечислите основные элементы структурных схем систем управления.
Как определить по передаточной функции динамического звена его временные характеристики: импульсную и переходную?
Как по переходной характеристике определить импульсную характеристику динамического звена?
Определите передаточную функцию динамического звена по его принципиальной электрической схеме
.
Определите передаточную функцию динамического звена по его принципиальной электрической схеме
.
По математической модели объекта управления в форме системы дифференциальных уравнений определить структурную схему объекта.
Как по дифференциальному уравнению звена найти его передаточную функцию
ИССЛЕДОВАНИЕ ВРЕМЕННЫХ ХАРАКТЕРИСТИК
ДИНАМИЧЕСКИХ ЗВЕНЬЕВ И ИХ СОЕДИНЕНИЙ
Цель работы: для звеньев, заданных передаточными функциями, выбираемыми из табл. 1 прил. 2, и их соединений выполнить следующее:
1) вывести аналитические выражения кривой разгона и импульсной переходной характеристик;
2) построить графические зависимости полученных характеристик при различных значениях постоянных времени и коэффициентов усиления.
Параметры звеньев выбираются из табл. 2 прил. 2 в зависимости от варианта, задаваемого преподавателем.
2.1 Теоретические сведения
Системы автоматического регулирования (САР) принято изображать в виде структурных схем. Структурная схема – это условное изображение, в котором отдельные элементы системы представляются прямоугольниками, а связи между элементами изображаются стрелками, показывающими направление передачи сигнала, н ад которыми ставится условное обозначение сигнала.
Для создания общей методики расчета различных САР было введено понятие динамического звена. Типовым звеном системы автоматического регулирования является составной элемент, имеющий один вход и один выход, и описываемый дифференциальным уравнением не выше второго порядка. На структурной схеме объектов управления звенья изображаются в виде прямоугольников, внутри которых записывается передаточная функция звена (рис. 1).
Рисунок 1. Пример изображения звена на структурных схемах
Одной из основных динамических характеристик объекта, широко используемых в теории автоматического регулирования, является передаточная функция.
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у ( р ) к преобразованному по Лапласу входу х ( р ) при нулевых начальных условиях. Передаточная функция является функцией комплексного переменного p , обозначается W ( p ): . Передаточная функция характеризует динамику объекта по определенному каналу, связывающему вход объекта с выходом. Если в объекте имеется несколько входов, то каждому каналу связи входа с выходом будет соответствовать своя передаточная функция.
Так же, как и дифференциальное уравнение, передаточная функция полностью характеризует динамику объекта. Если задано дифференциальное уравнение объекта, то для получения передаточной функции необходимо преобразовать дифференциальное уравнение по Лапласу и из полученного алгебраического уравнения найти соотношение .
Если известна передаточная функция объекта, то изображение выхода объекта у ( р ) равно произведению передаточной функции на изображение входа х ( р ): .
Любая самая сложная структурная схема может быть изображена с помощью трех основных типов соединения: – параллельного (рис. 2); – последовательного и соединения с обратной связью.
Рисунок 2. Структурная схема параллельного соединения звеньев
При параллельном соединении входные сигналы всех звеньев одинаковы и равны входу системы х ( р ), а выход системы у( р ) равен сумме выходов звеньев.
Запишем уравнения выходных координат каждого звена:
;
;
.
Выход всей системы будет равен
Передаточная функция системы: .
Передаточная функция системы параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев.
Последовательное соединение звеньев. Особенностью является то, что выход предыдущего звена является входом последующего (рис. 3).
Рисунок 3. Структурная схема последовательного соединения звеньев
Уравнения выходных сигналов каждого звеньев имеют вид:
;
;
.
Выходной сигнал последнего звена является выходом всей системы , передаточная функция системы:
.
Таким образом, передаточная функция системы последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев. Это соотношение справедливо лишь в том случае, если выход каждого звена зависит только от его входа и не зависит от выходной координаты последующего звена.
Рисунок 4. Структурная схема соединения звеньев с обратной связью
W n ( p )
W ос ( p )
Соединение звеньев с обратной связью. Обратной связью называют передачу сигнала с выхода звена на его вход (рис. 4), где сигнал обратной связи х ос алгебраически суммируется с внешним сигналом х ( p ) . Причем, если суммарный сигнал x 1 ( p ) определяется соотношением x 1 ( p ) = x ( p ) + x oc ( p ), то обратная связь называется положительной, если x 1 ( p ) = = x ( p ) – x oc ( p ), т.е. сигнал обратной связи вычитают из внешнего сигнала, то обратная связь называется отрицательной.
В линии обратной связи в общем случае может быть включено звено, в котором выходной сигнал y ( p ) преобразуется в соответствии с передаточной функцией W oc ( p ) в сигнал x oc ( p ). Иногда это звено может отсутствовать, т.е. W oc ( p ) = l и хос ( p ) = у ( p ) .
Найдем соотношение между передаточной функцией замкнутой системы W зс ( p ) и передаточными функциями отдельных звеньев W n ( p ) и W oc ( p ). Уравнения выходных сигналов каждого звена
;
;
.
Исключив из полученной системы уравнений x 1 ( p ) и x ос ( p ), получим , или
,
откуда передаточная функция замкнутой системы с положительной обратной связью : ,
передаточная функция замкнутой системы с отрицательной обратной связью: .
В реальных условиях на объект управления оказывают влияние внешние воздействия, которые называют возмущающими. Возмущающие воздействия (возмущения) вызывают отклонение регулируемого параметра от заданного значения.
Возмущения, действующие на САР, представляют собой непрерывные функции времени с различными законами изменения. В этом случае возникают трудности принципиального характера, так как заранее неизвестны законы измерения внешних воздействий, что затрудняет анализ динамики и статики САР. Для ликвидации возникших затруднений часто используют так называемые типовые, управляющие и возмущающие воздействия, которые представляют собой либо наиболее вероятные, либо наиболее неблагоприятные законы изменения управляющих и возмущающих воздействий. Например, довольно широко в качестве типовых используют воздействия полиномиального вида:
,
где n = 0, 1, 2, … – натуральные числа; – постоянные величины; 1 ( t ) – единичная ступенчатая функция,
При n = 0 имеем единичное ступенчатое воздействие: .
При n = 1 получим линейное воздействие: .
На рис. 5 представлены графики единичного ступенчатого и линейного входных воздействий.
Рисунок 5. Типовые полиномиальные воздействия
В некоторых случаях в качестве типового используется единичное импульсное воздействие следующего вида: , где d ( t ) – единичная дельта-функция
Единичная дельта-функция (единичный импульс) представляет собой математическую идеализацию импульса бесконечно малой длительности, бесконечно большой амплитуды, имеющего конечную площадь, равную единицы, т.е. .
Момент приложения внешних воздействий к САР обычно принимается за ноль отсчёта времени. При таком подходе внешние воздействия для отрицательного момента времени равны нулю. В аналитические выражения для внешних воздействий в качестве множителя вводят единичную ступенчатую функцию.
Важнейшей характеристикой САР и её составных элементов являются переходные и импульсные переходные (импульсные) функции. Графическое представление переходных и импульсных функций называют временными характеристиками. Переходной функцией h ( t ) называют функцию, описывающую сигнал на выходе при условии, что на вход подано единичное ступенчатое воздействие, при нулевых начальных условиях. График переходной функции, представляющий собой зависимость функции h ( t ) от времени t , называют переходной характеристикой. В том случае, если амплитуда единичного ступенчатого воздействия отлична от единицы получают разновидность переходной характеристики, которая называется кривой разгона.
Импульсной или весовой функцией w ( t ) называют функцию, описывающую реакцию на единичное импульсное воздействие при нулевых начальных условиях. График зависимости функции w ( t ) от времени называют импульсной переходной (импульсной) характеристикой.
Любое внешнее воздействие сложной формы может быть приближенно представлено в виде совокупности типовых воздействий, связанных между собой определенными математическими операциями.
Аналитическое определение переходных функций и характеристик основано на следующих положениях. Если задана передаточная функция системы или составной части W ( p ) и известен входной сигнал x ( t ), то выходной сигнал y ( t ) определяется следующим соотношением: .
Таким образом, изображение выходного сигнала представляет собой произведение передаточной функции на изображение входного сигнала . Сигнал y ( t ) в явном виде получим после перехода от изображения к оригиналу y ( t ).
Так как изображение единичного ступенчатого воздействия равно , то изображение переходной функции определяется соотношением: . Следовательно, для нахождения переходной функции необходимо передаточную функцию разделить на p и выполнить переход от изображения к оригиналу.
Изображение единичного импульса равно 1. Тогда изображение импульсной функции – . Таким образом, передаточная функция является изображением импульсной функции.
Так как , то между импульсной и переходной функциями существует следующая зависимость: .
Импульсная и переходная функции, как и передаточная функция, являются исчерпывающими характеристиками системы при нулевых начальных условиях. По ним можно определить выходной сигнал при произвольных входных воздействиях.
В работе рассматриваются следующие звенья:
1) идеальное интегрирующее : ;
2) реальное интегрирующее : ;
3) апериодическое 1-го порядка: ;
4) апериодическое 2-го порядка: ;
5) реальное дифференцирующее : ;
6) колебательное ( 0 x ): ;
7) консервативное : ;
8) звено запаздывания: ,
где k – коэффициент пропорциональности (коэффициент усиления); T – постоянная времени интегрирования, с; t – время запаздывания, с; 0 x – коэффициент затухания колебаний (коэффициент демпфирования).
2.2 Алгоритм выполнения работы
1. Записать передаточную функцию звена с нулевыми начальными условиями.
2. Определить вид переходных процессов с учетом единичного ступенчатого и импульсного воздействий.
3. Построить графики переходных процессов при различных значениях постоянных времени и коэффициента усиления. Рассмотреть следующие случаи: – при табличных значениях параметров ( k и T ); – изменив значения коэффициентов усиления с исходными значениями постоянных времени; – изменив значения постоянных времени и исходных значениях коэффициентов усиления.
2.3 Примеры расчета
Для звеньев и соединения звеньев, заданных передаточными функциями: , ,
построить переходные процессы при различных значениях постоянных времени и коэффициента усиления.
1. Передаточная функция реального дифференцирующего звена: , откуда , где – единичное ступенчатое воздействие, или – единичная импульсная функция, следовательно: , .
2. Выполним обратное преобразование Лапласа (табл. 3 прил. 1) и получим переходной процесс для единичного ступенчатого воздействия: . Между импульсной и переходной функциями существует следующая зависимость , то .
3. Строим временные характеристики звена, рис. 6.
Рисунок 6. Временные характеристики реального дифференцирующего звена
4. Передаточная функция апериодического звена второго порядка: , откуда .
Учитывая единичное ступенчатое воздействие или единичную импульсную функцию, получим соответственно:
и
5. Выполним обратное преобразование Лапласа (см. табл. 3 прил. 1) и получим переходной процесс для единичного ступенчатого воздействия .
Импульсная функция .
6. Строим временные характеристики звена (рис. 7).
Рисунок 7. Временные характеристики апериодического звена II -го порядка
7. Передаточная функция для последовательного соединения звеньев . Для последовательно соединенных реального дифференцирующего звена и апериодического звена второго порядка передаточная функция запишется следующим образом:
,
,
где k 1 – коэффициент усиления; k 2 – коэффициент усиления апериодического звена второго порядка; T 1 – постоянная времени реального дифференцирующего звена; T 2 , T 3 – постоянные времени апериодического звена второго порядка.
Учитывая единичное ступенчатое воздействие или единичную импульсную функцию, получим соответственно:
,
.
8. Н айдем корни характеристического уравнения методом неопределенных коэффициентов. Получим уравнение вида:
Выполним обратное преобразование Лапласа и получим переходной процесс для единичного ступенчатого воздействия:
9. Строим временные характеристики системы (рис. 8).
Рисунок 8. Временные характеристики системы
2.4 Контрольные вопросы и задания
1. Что такое «типовое звено» САР? Назовите типовые звенья.
2. Что такое передаточная функция САР? Что она характеризует?
3. Основные типы соединения звеньев в структурных схемах.
4. Параллельное соединение звеньев. Структурная схема. Передаточная функция.
5. Последовательное соединение звеньев. Структурная схема. Передаточная функция.
6. Соединение звеньев с обратной связью. Структурная схема. Передаточная функция системы с положительной и отрицательной обратной связью.
7. Что такое «временные характеристики САР»?
8. Что представляет собой переходная функция?
9. Что представляет собой импульсная (весовая) функция?
1. Назовите основные типы возмущающих воздействий САР.
2. Что представляет собой единичная ступенчатая функция?
3. Что представляет собой единичная импульсная функция?
4. Связь между импульсной и переходной функциями.
[spoiler title=”источники:”]
http://drive.ispu.ru/elib/lebedev/3.html
http://itmu.vsuet.ru/Posobija/OTU/htm/LR2.htm
[/spoiler]
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В это части будут рассмотрены:
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена).
2.10. Весовая и переходная функции звена (системы).
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции.
2.12. Mетод переменных состояния.
2.13. Переход от описания переменных «вход-выход» к переменным состояния.
Попробуем применить, полученные знания на практике, создавая и сравнивая расчетные модели в разных видах. Будет интересно познавательно и жестко.

2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена)
Рассмотрим динамическое звено САР изображенное на рисунке 2.9.1

Рис. 2.9.1 — Звено САР
Предположим, что уравнение динамики имеет вид:
![$T_2^2cdot y''(t)+T_1cdot y'(t)+y(t)=kcdot[tau cdot x'(t)+x(t)];$](https://habrastorage.org/getpro/habr/formulas/452/54e/3d3/45254e3d313950b3b71eb6cf4beb9973.svg)
где:
 — постоянные времени;
— постоянные времени;
 — коэффициент усиления.
— коэффициент усиления.
Пусть известны отображения:

Найдем изображения для производных:


Подставим полученные выражения в уравнение динамики и получим уравнение динамики в изображениях:
![$T_2^2 cdot s^2cdot Y(s) + T_1 cdot s cdot Y(s) + Y(s) + sum добавок = k cdot[s cdot tau cdot X(s) +X(s)] +k cdot добавки\ (T_2^2 cdot s^2 + T_1 cdot s + 1) cdot Y(s)+ sum добавок =k cdot(s cdot tau +1)cdot X(s) +k cdot добавки\ Y(s) = underbrace{frac{k cdot(s cdot tau +1)}{T_2^2 cdot s^2 + T_1 cdot s + 1}}_{W(s)}cdot X(s) + underbrace{frac{k cdot добавки-sum добавок}{T_2^2 cdot s^2 + T_1 cdot s + 1}}_{B(s)} $](https://habrastorage.org/getpro/habr/formulas/aef/6f6/b40/aef6f6b40fdcad291c2fa8ac0e5c602a.svg)
B(s) — слагаемое, которое определяется начальными условиями, при нулевых начальных условиях B(s)=0.
W(s) — передаточная функция.

Передаточной функцией САР (звена) называется отношение изображений выходного сигнала к входному воздействию при нулевых н.у.
После того, как в явном виде найдено изображение для неизвестной выходной величины, нахождение оригинала не представляет сложностей. Либо по формуле Хэвисайда, либо разложением на элементарные дроби, либо по таблице из справочника.
Пример
Построить выходной сигнал звена САР при единичном входном воздействии и нулевых начальных условиях, если уравнение динамики звена имеет следующий вид:

начальные условия:

входное воздействие:
 — единичное ступенчатое воздействие.
— единичное ступенчатое воздействие.
Выполним преобразование Лапласа:

Подставим в уравнение динамики и получим уравнение динамики в изображениях:

Для получения выходного сигнала из уравнения в изображениях выполним обратное преобразования Лапласа:
![$y(t) = L^{-1}[Y(s)] = L^{-1}left[frac{k}{s(Tcdot s+1)}right] =frac{1}{T}k cdot L^{-1}left[frac{1}{s(s+frac{1}{T})}right] Longrightarrow \ y(t) = frac{k}{T}(1-e^{-frac{t}{T}}) cdot T = k cdot(1-e^{-frac{t}{T}}).$](https://habrastorage.org/getpro/habr/formulas/97d/8ff/ae1/97d8ffae12214b2a6b7a2fc102a8a830.svg)
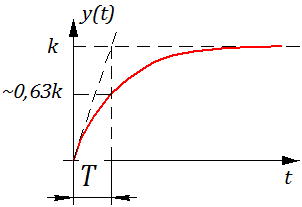
Рисунок 2.9.2 График переходного процесса.
2.10. Весовая и переходная функции звена (системы).
Определение: Весовой функцией звена (системы) называется реакция системы при нулевых н.у. на единичное импульсное воздействие.

Рисунок 2.10.1 Весовая функция.
Определение: Переходной функцией звена (системы) при н.у. называется реакция на единичное ступенчатое воздействие.
Рисунок 2.10.2 Переходная функция.
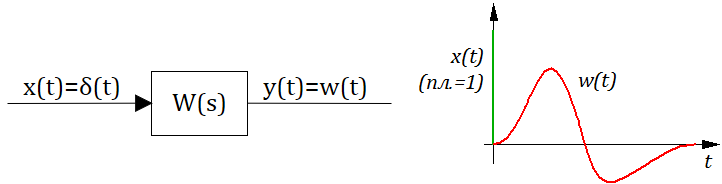
Рисунок 2.10.3 Пример весовой функции.
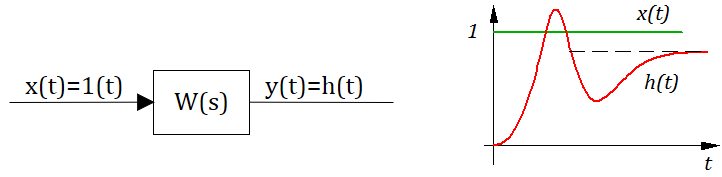
Рисунок 2.10.4 Пример перходной функции.
На этом месте можно вспомнить, что преобразование Лапласа это интеграл от 0 до бесконечности по времени (см. предыдущий текст), а импульсное воздействие при таком интегрировании превращается в 1 ![$L[delta(t)] =1$](https://habrastorage.org/getpro/habr/formulas/d24/4d5/6db/d244d56db4dc3cfc3342d863b7d08c6f.svg) тогда в изображениях получаем что:
тогда в изображениях получаем что:

Передаточная функция играет роль изображения реакции звена или системы на единичное импульсное воздействие.

Рисунок 2.10.5 Весовая функция как передаточная в изображениях.

Рисунок 2.10.6 Ступенчатое воздействие.
Для единичного ступенчатого воздействия преобразование Лапласа тоже известно (см. предыдущий текст):
![$L[1(t)] = frac{1}{s}$](https://habrastorage.org/getpro/habr/formulas/5a1/e1c/378/5a1e1c3784ce5c2ec35203fae2d8c0db.svg)
тогда в изображениях получаем, что реакция системы  на ступенчатое воздействие, рассчитывается так:
на ступенчатое воздействие, рассчитывается так:

Реакция системы на единичное ступенчатое воздействие рассчитывается обратным преобразованием Лапласа:
![$h(t) = L^{-1}left[frac{W(s)}{s}right]$](https://habrastorage.org/getpro/habr/formulas/bea/82f/873/bea82f87358e236ed3baee37ad74f64d.svg)
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. Формула Дюамеля-Карсона
Предположим, что на вход системы поступает произвольное воздействие x(t), заранее известное. Найти реакцию системы y(t), если известны входное воздействие x(t) и весовая функция w(t).
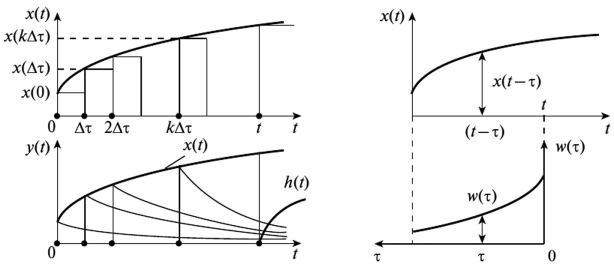
Рисунок 2.11 Демонстрация расчета по формуле Дюамеля-Карсона
Решение.
Представим, что входное воздействие представляет собой последовательность прямоугольных импульсов до времени t и ступеньки высотой x(t) в момент времени t. см.рис. 2.11 Для каждого импульса мы можем записать реакцию системы через весовую функциию:

где:
 — значение отклика по завершению предыущего импульса;
— значение отклика по завершению предыущего импульса;
 — время завершения текущего импульса;
— время завершения текущего импульса;
 — значение весовой функции в начале текущего импульса.
— значение весовой функции в начале текущего импульса.
Тогда для определения занчения отклика в произвольный момент времени необходимо сложить все импульсы и ступенчатое воздействие в момент времени t:

Переходя к пределам

получаем интеграл:

если перейти от t к бесконечности мы получим формулу интеграла Дюамеля-Карсона, или по другому «интеграла свертки» который обеспечивает вычисление оригинала функции по произвдению изображения двух функций:
![$Y(s) = L[y(t)];\ W(s) =L[w(t)];\ X(s) = L[x(t)];\ если Y(s) = W(s)cdot X(s), то\ y(t) =int_0^infty x(tau)cdot w(t-tau)dtau $](https://habrastorage.org/getpro/habr/formulas/05b/8f6/dd8/05b8f6dd84b1704dc9fe94622fda50a2.svg)
где  — вспомогательное время
— вспомогательное время
Для вывода аналогичной зависмости от переходной функции вспомним что изображение весовой и переходной функции связаны соотношением:  запишем выражение изображения для отклика в операторной форме:
запишем выражение изображения для отклика в операторной форме:
![$y(t) = L^{-1} [W(s) cdot Y(s)]=L^{-1} left[s cdot frac{W(s)}{s} cdot Y(s) right] \ свойства преобразований Лапласа x(t) to X(s), frac {d}{dt}x(t) to s cdot X(s) to \ y(t)= frac {d}{dt}L^{-1} left[ H(s) cdot Y(s)right]$](https://habrastorage.org/getpro/habr/formulas/bb8/992/ef7/bb8992ef7d72487bfc7660c8f730465d.svg)
Используя интеграл свертки получаем, что при известной переходной функции (h(t)) и известному входному воздействию х(t) выходное воздействие рассчитывается как:

2.12. Mетод переменных состояния.
До этого мы рассматривали системы с одной передаточной функцией, но жизнь всегда сложнее и как правило в системах есть несколько передаточных функций несколько входных воздейстий и несколько реакций системы. (см. рис. 2.12.1)

Рисунок 2.12.1 Моногомерная система автоматического управления.
В этом случае наиболее удобной формой пердставления систем для их анализа и расчета оказался метод переменных состояния. Для этого метода, вместо передаточных функций связывающих вход с выходом используются дополнительные переменные состояния, которые описывают систему. В этом случае можно говорить, что состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно. см. рис. 2.12.2
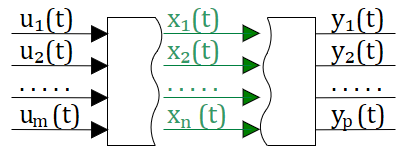
Рисунок 2.12.2 Перменные состояния в многомерной системе.
В методе состояний, производные всех переменных состояния, в общем случае зависит от всех переменных и всех входных воздействия, и могут быть записаны в представленной ниже системы обыкновенных дифференциальных уравнений (ОДУ) первой степени. Эта система уравнений называю системой ОДУ в форме Коши:

Выход из системы зависит от переменных состояния и, в общем случае от входных воздействий и описывается следующей системой уравнений:

где:
n — количество перемнных состояния,
m — количество входных воздействий,
p — количество выходных переменных;
Данная система уравнений может быть записана в матричной форме:

где:
![$u=left[ begin{gathered} u_1(t)\ u_2(t)\ ..\ u_m(t)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/115/348/109/115348109c76bbe30ce5b48761dde28a.svg) — вектор входа (или вектор управления);
— вектор входа (или вектор управления);
![$x'=left[ begin{gathered} x'_1(t)\ x'_2(t)\ ..\ x'_n(t)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/f0d/a98/5e7/f0da985e73d1f45f07b95ec4f77006d7.svg) — вектор столбец производных переменных состояния;
— вектор столбец производных переменных состояния;
![$x=left[ begin{gathered} x_1(t)\ x_2(t)\ ..\ x_n(t)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/12f/442/f08/12f442f0801502991a0a262e78a905db.svg) — вектор столбец переменных состояния;
— вектор столбец переменных состояния;
![$y=left[ begin{gathered} y_1(t)\ y_2(t)\ ..\ y_p(t)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/896/70f/103/89670f103ee93495ed7c1024a29d5ef4.svg) — вектор выхода;
— вектор выхода;
![$А=left[ begin{gathered} а_{11} а_{12} ... a_{1n}\ а_{21} а_{22} ... a_{2n}\ .. .. .. ........ \ а_{n1} а_{n2} ... a_{nn}\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/59c/702/fbf/59c702fbf68f54ad11c9e147cf3ce056.svg) — собственная матрица системы [n x n],
— собственная матрица системы [n x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
![$B=left[ begin{gathered} b_{11} b_{12} ... b_{1m}\ b_{21} b_{22} ... b_{2m}\ .. .. .. ........ \ b_{n1} b_{n2} ... b_{nm}\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/4f4/446/8f7/4f44468f71c8ace2862bb0296d2d88e8.svg) — матрица входа [n x m],
— матрица входа [n x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
![$C=left[ begin{gathered} c_{11} c_{12} ... c_{1n}\ c_{21} c_{22} ... c_{2n}\ .. .. .. ........ \ c_{p1} c_{p2} ... c_{pn}\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/c51/cd4/e24/c51cd4e24ea23ec6b1371f6ab79b9026.svg) — матрица выхода а [p x n],
— матрица выхода а [p x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
![$D=left[ begin{gathered} d_{11} d_{12} ... d_{1m}\ d_{21} d_{22} ... d_{2m}\ .. .. .. ........ \ d_{p1} d_{p2} ... d_{pm}\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/67f/950/c35/67f950c35e2c1d1df149879bb13e6a1c.svg) — матрица обхода [p x m],
— матрица обхода [p x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
В нашем случае почти всегда все элементы матрицы D будут нулевыми: D = 0.
Такое описание системы позволяет с одной стороны стандартным образом описывать различные технические системы. Явная формула для расчета производных позволяет достаточно просто осуществлять численное интегрирование по времени. И это используется в различных программах моделирования
Другое использование данного представления для простых систем, описанных в переменных «вход-выход», зачастую позволяет устранить технические трудности, связанные с решением ОДУ высокой степени.
Еще одним преимуществом данного описания, является то, что уравнения в форме Коши можно получить из законов физики
Пример решения задачи в форме коши.
Рассмотрим задачу моделирования гидравлического привода, при следующих условиях:
Дано:
Цилиндрический плунжер диаметром 10 мм, с приведенной массой 100 кг, работает на пружину жесткостью 200 Н/мм и демпфер с коэффициентом вязкого трения — 1000 Н/(м/с). Полость начальным объемом 20 см3 соединяется с источником давлния дросселем диаметром диаметр которого 0,2 мм. Коэффициент расхода дросселя 0.62. Плотность рабочей жидкости ρ = 850 кг/м3.
Определить:
Перемещение дросселя, если в источнике давление происходит скачек 200 бар. см. рис. 2.12.13

Рисунок 2.12.3 Гидравлическая система.
Уравенение движение плунжера:

Где:
 – площадь плунжера,
– площадь плунжера,
 – жесткость пружины,
– жесткость пружины,
 – коэффициент вязкого трения, p – давление в камере.
– коэффициент вязкого трения, p – давление в камере.
Поскольку дифференциальное движения это уравнение второго порядка, превратим его в систему из двух уравнений первого порядка, добавив новую переменную — скорость  , тогда
, тогда 

Уравнение давления в камере, для упрощения принимаем что изменениям объема камеры из-за перемещения плунжера можно пренебречь:

Где: Q – расход в камеру, V — объем камеры.
Расход через дроссель:

Где: f– площадь дросселя,
 – давление в источнике, p – давление в камере.
– давление в источнике, p – давление в камере.
Уравнение дросселя не линейное, по условию задачи, давление входное изменяется скачком, от 0 до 200 бар, проведем линеаризацию в окрестности точки давления 100 бар тогда:

Подставляем линеаризованную формул расхода в формулу давления:

Таким образом общая система уравнений в форме Коши, для рис 2.12.3 привода принимает вид:

Матрицы A, B, С, В для матричной формы системы уравнений принимают вид:
![$left { begin{align} x' &= v \ v' &=-frac{c_{pr}}{m}cdot x-frac{b_{tr}}{m}cdot v+frac{A_p}{m}cdot p\ p' &= - frac{E}{V}A_p cdot v - frac{E}{V}K_{100} cdot p + frac{E}{V}K_{100} cdot p_n end{align} right.\ A =left[ begin{array}{cccc} 0& 1 & 0\ -frac{c_{pr}}{m}& -frac{b_{tr}}{m} &frac{A_p}{m}\ 0& - frac{E}{V}A_p & - frac{E}{V}K_{100} end{array} right]; B = left[ begin{array}{cccc} &0 \ &0\ & frac{E}{V}K_{100} end{array} right]; C= left[ 1,0,0 right]; D =[0].$](https://habrastorage.org/getpro/habr/formulas/402/205/d3b/402205d3be57d7c66be167d2e7eb6884.svg)
Проверим моделированием в SimInTech составленную модель. На рисунке 2.12.13 представлена расчетная схема содержащая три модели:
1 — «Честная» модель со всеми уравнениями без упрощений.
2 — Модель в блоке «Переменные состояние» (в матричной форме).
3 — Модель в динамическом блоке с линеаризованным дросселем.
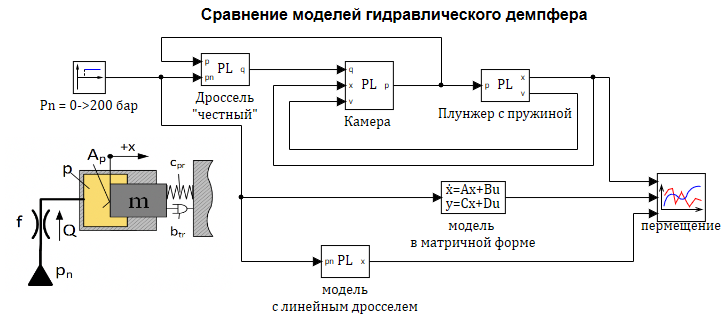
Рисунок 2.12.4 Расчетная схема .
Все условия задачи задаются как глобальные константы проекта, в главном скрипте проекта, там же расчитываются на этапе инициализации расчета, площади плунжера и проходного сечения дросселя см. рис. 2.12.5:
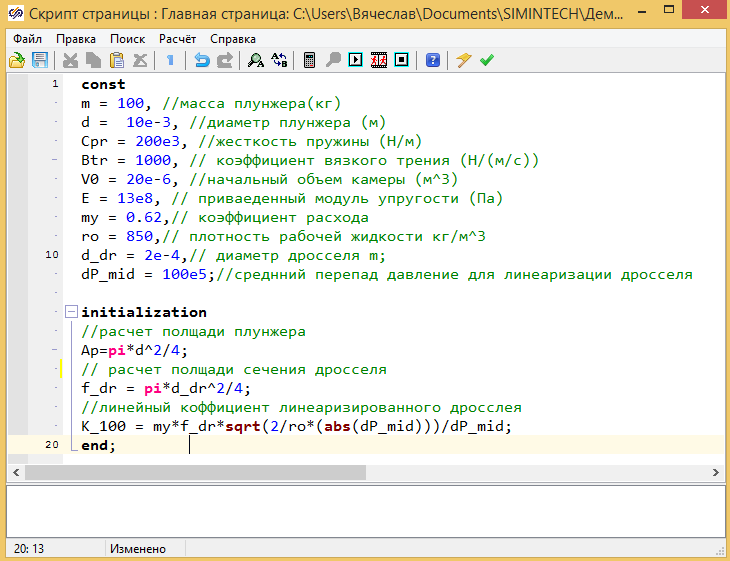
Рисунок 2.12.5 Глобальный скрипт проекта.
Модель на внутреннем языке программирования представлена на рис. 2.12.6. В данной модели используется описание модели в форме Коши. Так же выполняется учет изменения объема дросселя на каждом шаге расчета, за счет перемещения плунжера (Vk = V0+Ap*x.)
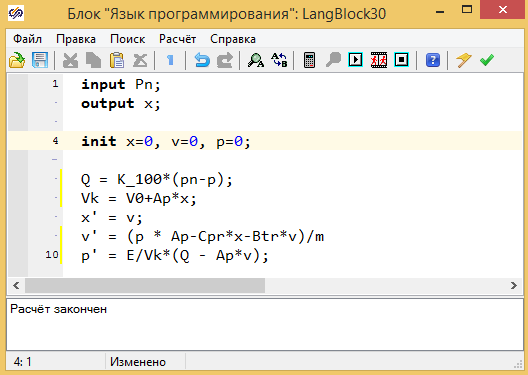
Рисунок 2.12.6 Скрипт расчета модели в форме Коши.
Модель в матричном форме задается с использованием глобальных констант в виде формул. (Матрица в SimInTech задается в виде последовательности из ее столбцов) см. рис. 2.12.7
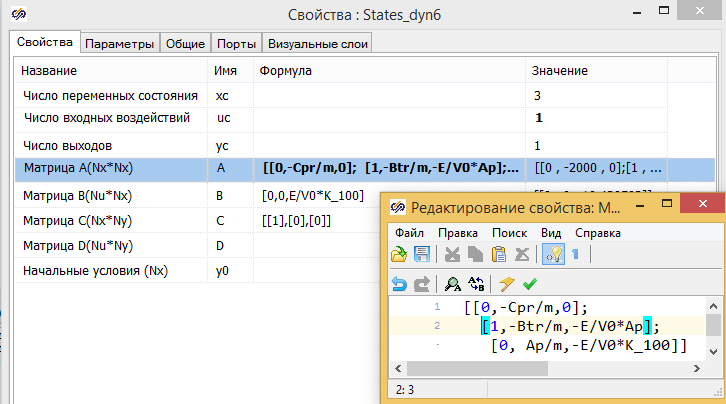
Рисунок 2.12.7 Настройка блока расчета системы уравнений в пременных состояния в матричной форме.
Результаты расчета показывают, что модель в матричной форме и модель на скриптовом языке в форме Коши, практически полностью совпадают, это означает, что учет изменения объема полости практически не влияют на результаты. Кривые 2 и З совпадают.
Процедура линеаризация расхода через дроссель вызывает заметное отличие в результатах. 1-й график c «честной» моделью дросселя, отличается от графиков 2 и 3. (см. рис. 2.12.8)
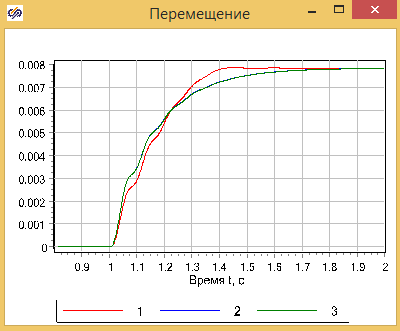
Рисунок 2.12.8 Результаты расчета трех моделей гидравлического плунжера.
Сравним полученные модели, с моделью созданной из библиотечных блоков SimInTech, в которых учитываются так же изменение свойств реальной рабочей жидкости — масла АМГ-10. Сама модель представлена на рис. 2.12.9, набор графиков на рисунке 2.12.10
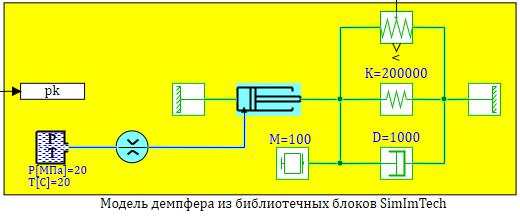
Рисунок 2.12.9 Модель демпфера из библиотечных блоков.

Рисунок 2.12.10 Результаты рассчета моделей демпфера. График 4 — модель из библиотечных блоков.
На графиках видно, что уточненная модель отличается от предыдущих, однако погрешность модели составлят наших упрощенных моделей составляют примерно 10%, в лишь в некоторые моменты времени.
2.13. Переход от описания переменных «вход-выход» к переменным состояния и обратно
Рассмотрим несколько вариантов перехода от описания «вход-выход», к переменным состояния:

Вариант прехода зависит от правой части уравнения с переменными «вход-выход»:

2.13.1. Правая часть содержит только b0*u(t)
В этом варианте, в уравнениях в правой части отсутствуют члены с производными входной величины u(t). Пример с плунжером выше так же относится к этому варианту.
Что бы продемонстрировать технологию перехода рассмотрим следующее уровнение:

Для перехода к форме Коши ведем новые переменные:

И перепишем уравнение относительно y”'(t):

Используя эти переменные можно перейти от дифференциального уравнения 3-го прядка, к системе из 3-х уравнений первого порядка в форме Коши:

Соотвественно матрицы для матричного вида уравнений в переменных сосотяния:
![$A =left[ begin{array}{cccc} 0& 1 & 0\ 0& 0 &1\ -frac{a_0}{a_3}& -frac{a_1}{a_3} & -frac{a_2}{a_3} end{array} right]_{[3 times 3]}; B = left[ begin{array} {}&0 \ &0\ & frac{b_0}{a_3} end{array} right]_{[3 times 1]}; C= left[ 1,0,0 right]_{[1 times 3]}; D =[0].$](https://habrastorage.org/getpro/habr/formulas/c8b/49e/587/c8b49e587906bfa135e99cc562941e67.svg)
2.13.2. Правая часть общего вида
Более сложный случай, когда в уравнениях есть производные от входных воздействий и уравнение в общем случае выглядит так:
Сделаем преобразования: перейдем к уравнениям динамики в изображениях:
![$left[ begin{gathered} y(t) to Y(s)\ y'(t) to s cdot Y(s)\ y''(t) to s^2cdot Y(s)\ ..\ y^{n}(t) to s^{n} cdot Y(s)\ end{gathered} right] ; left[ begin{gathered} u(t) to U(s)\ u'(t) to s cdot U(s)\ u''(t) to s^2cdot U(s)\ ..\ u^{m}(t) to s^{m} cdot U(s)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/dcf/a1e/75c/dcfa1e75c1a6cb523b306e9bee579d60.svg)
Тогда можно представить уравнение в изображениях в виде:

где:

Разделим уравнение в изображениях на произведение полиномов  , получим:
, получим:

Где:  — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины
— некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины  . Тогда входная величина может быть в изображениях представлена как:
. Тогда входная величина может быть в изображениях представлена как:

Вренемся к оригиналу от изображений получим:  ,
,
где:  — дифференциальный оператор.
— дифференциальный оператор.

А это дифференциальное уравнение n-го порядка мы можем преобразовать к системе из n дифференциальных уравнений первого порядка, как это мы делали выше:
![$left { begin{eqnarray} x_1'&=& x_2\ x_2'&= &x_3\ &.....\ x_n'&=&-frac{1}{a_n}[a_0 cdot x_1+a_1 cdot x_2+a_2cdot x_3+..+a_{n-1}cdot x_n]+frac{u(t)}{a_n} end{eqnarray} right.$](https://habrastorage.org/getpro/habr/formulas/0d9/882/cb1/0d9882cb13fa988f2e212536e10b7a67.svg)
Таким образом, мы получили систему уравнение в форе Коши, относительно переменных состояния  :
:
![$ X_1=left[ begin{gathered} x_1(t)\ x_2(t)\ ..\ x_n(t)\ end{gathered} right]$](https://habrastorage.org/getpro/habr/formulas/1ac/e00/531/1ace00531e5b433faed73a68969b4043.svg)
А регулируемую величину (выход системы) мы так же можем выразить через эти переменные, в изображениях:

Перейдем от изображения к оригиналам:

Если обозначить вектор ![$С = [b_{m+1},b_m, ..b_2,b_1,b_0]$](https://habrastorage.org/getpro/habr/formulas/681/1f5/71a/6811f571a71ad748294a0b9c39e16f84.svg) , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
, то мы получим уравнения переменных состояниях в матричной форме, где D = 0:

Пример:
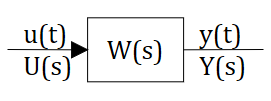
Рисунок 2.13.1 Передаточная функция.
Имеется передаточная функция (рис. 2.13.1) в изображениях :

Необходимо преобразовать передаточную функцию к системе уравнений в форме Коши
В изображения реакция системы связана с входным воздействие соотношением:

Разделим в последнем правую и левую часть на произведения  , и введем новую перменную
, и введем новую перменную  :
:

Полиномы N(s) и L(s) равны:

Перейдем в последнем выражении от изображения к оригиналам и ведем новые переменные (состояния):

Переходим от уравнения третьего порядка к системе трех уравнений первого порядка:
![$left { begin{eqnarray} x_1'&=&x_2\ x_2'&=&x_3\ x_3'&=&- frac{1}{2} left[ x_1+3 cdot x_2+x_3 right]+frac {1}{2} cdot u(t) end{eqnarray} right. $](https://habrastorage.org/getpro/habr/formulas/a1f/bb1/2f6/a1fbb12f622b1487e55e3cb70ddb2b50.svg)
Или в матричной форме:
![$x' = A cdot x+ B cdot u\ А=left[ begin{gathered} 0& 1& 0\ 0& 0& 1\ - frac{1}{2}& - frac{3}{2}& - frac{1}{2}\ end{gathered} right]; B = left[ begin{gathered} 0 \ 0\ frac{1}{2} \ end{gathered} right];\ $](https://habrastorage.org/getpro/habr/formulas/1f4/318/510/1f4318510f1e17a39444e2acfb56c204.svg)
Для получения второго матричного уравнения воспользуемся соотношением для новых переменных в отображениях:

Перейдем от изображений к оригиналу:

Таким образом второе уравнение матричной системы выглядит так:
![$y =C cdot x+ D cdot u;\ C=[1 1 0]; D = 0;$](https://habrastorage.org/getpro/habr/formulas/ae3/016/85b/ae301685b34a605eb0773fa308c2e5f9.svg)
Проверим в SimInTech сравнив передаточную функцию и блок переменных состояния, и убедимся, что графики совпадают см. рис. 2.13.2

Рисунок 2.13.2 Сравнение переходного процеса у блока передаточной функции и блока переменных состояния.
Продолжение лекций находится здесь:
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1–го порядка (инерционное звено). На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.5. Колебательное звено.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено.
3.8. Инерционно-интегрирующее (звено интегрирующее звено с замедлением).
3.9 Изодромное звено (изодром).
Полезные ссылки:
Модель демпфера из лекции можно взять здесь…
Волченко Ю.М. Теоремы операционного исчисления.
Интеграл Дюамеля и физический смысл функции веса
Лекция. «Векторно-матричные модели систем управления в непрерывном времени»
Л. С. Шихобалов. Учебное пособие «МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ»
Характеристическое уравнение матрицы
Подробное описание моделирования гидравлического демпфера.
