Решение. Шарик подвешен на нити будем считать математическим маятником.
Период колебаний математического маятника определяется по формуле:
[ T=2cdot pi cdot sqrt{frac{A}{g}} (1). ]
Математический маятник находится в поле действия нескольких сил. Силы тяжести и силы Архимеда.
g – эффективное ускорение, характеризующее результирующее действие этих сил.
Силы направлены в противоположные стороны:
[ vec{g}={{vec{g}}_{0}}+vec{a} (2). ]
g0 – ускорение свободного падения, g0 = 10 м/с2.
Определим а. Покажем рисунок.
[ begin{align}
& vec{g}={{{vec{g}}}_{0}}+vec{a}. \
& oY: g={{g}_{0}}-frac{{{rho }_{1}}cdot {{g}_{0}}cdot V}{m}, V=frac{m}{rho }, g={{g}_{0}}-frac{{{rho }_{1}}cdot {{g}_{0}}cdot m}{mcdot rho }, g={{g}_{0}}-frac{{{rho }_{1}}cdot {{g}_{0}}}{rho }, \
& frac{{{rho }_{1}}}{rho }=frac{1}{3}, g={{g}_{0}}-frac{1cdot {{g}_{0}}}{3}, g=frac{2cdot {{g}_{0}}}{3} (3). \
end{align}
]
Подставим (3) в (2)
[ T=2cdot pi cdot sqrt{frac{3cdot A}{2cdot {{g}_{0}}}} (4). ]
Т = 1,0 с.
« Последнее редактирование: 15 Февраля 2015, 07:12 от alsak »

Записан
2017-01-06 ![]()
Определить период колебаний шарика, скользящего с высоты $h$ вниз и вверх по двум наклонным плоскостям с углами, равными $alpha$ и $beta$ (рис.). Силу трения и потери скорости при ударе не учитывать.

Решение:
Если шарик начинает скользить с высоты $h$ (см. рис.), то он приходит вниз со скоростью $v_{0} = sqrt{2gh}$. Дальнейшее движение его вверх по наклонной плоскости будет равнозамедленным со скоростью $v = v_{0} — at$, где $a$ — ускорение, сообщаемое шарику силой тяжести.
Для движения шарика по правой из наклонных плоскостей ускорение $a = g sin beta$ поэтому его скорость
$v = v_{0} – gt sin beta$.
Очевидно, шарик будет двигаться вверх по наклонной плоскости до тех пор, пока его скорость v не станет равной нулю, т. е. в течение промежутка времени $t_{1} = v_{0}/g sin beta$.
Столько же времени шарик будет двигаться вниз, поэтому полное время его движения по правой наклонной плоскости
$T_{1} = 2t_{1} = 2v_{0}/ g sin beta$.
Аналогично, для левой наклонной плоскости имеем
$T_{2} = 2v_{0}/g sin alpha$.
Полный период колебания шарика равен
$T = T_{1} + T_{2} = (2v_{0}/g)(1/ sin alpha + 1/ sin beta)$.
Подставляя значение $v_{0} = sqrt{2gh}$, получим
$T = 2 sqrt{2h/g} (1/ sin alpha + 1 / sin beta)$.
Содержание:
Колебательное движение:
Колебательное движение (колебания) — один из наиболее распространённых процессов в природе и технике.
Наблюдение. Под действием ветра колеблются высотные дома и высоковольтные линии электропередачи, совершают колебания маятник заведённых часов, автомобиль на рессорах во время движения. Землетрясения — это колебания земной коры, приливы и отливы — колебания уровня воды в морях и океанах, обусловленные притяжением Луны, удары пульса — результат периодических сокращений сердечной мышцы человека.
Колебательные явления изучает специальный раздел физики — теория колебаний. Знания о колебательных процессах нужны судо- и самолётостроителям, специалистам промышленности и транспорта, конструкторам радиотехнической и звуковой аппаратуры и др.
Опыт 1.
Для наблюдения и изучения колебаний, а также для применения в разнообразных приборах используют маятники. Простейший маятник — это шарик, подвешенный на нити к какой-либо опоре. Если шарик отклонить от исходного положения равновесия и отпустить, то он начнёт двигаться слева направо, справа налево до тех пор, пока колебания не прекратятся (рис. 25).
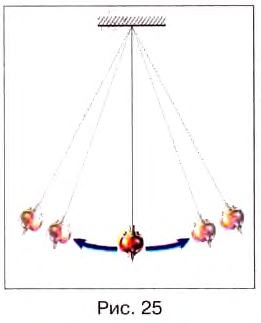
В физике маятник подобной конструкции называют математическим маятником.
Каковы же самые характерные признаки колебательных движении? Проведённый опыт даёт возможность сделать вывод, что во время колебаний определённые состояния движения тела повторяются или почти повторяется. Сделав одно полное колебание, т. е. пройдя путь от крайнего левого положения к крайнему правому и назад, тело, подвешенное на нити, и в дальнейшем будет повторять такое же движение. Мы уже знаем, если движение тела повторяется со временем, то его называют периодическим.
Механические колебания – это такое движение, при котором положение и скорость движения тела точно или приблизительно повторяются через определённые интервалы времени.
Повторяются движения поршня в двигателе автомобиля, лодок на волнах, стержня отбойного молотка, сита сортировочной установки. Всё это примеры механических колебаний.
Математический маятник состоит из нескольких тел, взаимодействующих между собой: Земля и шарик, шарик и нить, нить и опора в точке подвеса. Если действием других тел на маятник можно пренебречь, то говорят, что тела в составе маятника образуют колебательную систему. Если вывести колебательную систему из состояния равновесия — отклонить шарик из исходного положения и отпустить, то далее колебания будут продолжаться без внешнего вмешательства за счёт взаимодействия между телами системы. Колебания, происходящие в колебательной системе за счёт взаимно действия между образующими её телами, называют свободными.
Рассмотренные нами колебания шарика на нити являются примером свободных колебаний.
А какой вид имеют колебания и какими физическими величинами они характеризуются?
Опыт 2.
Возьмём маятник, в котором вместо шарика подвешен грузик со сквозным отверстием. С помощью такого устройства можно записывать колебания (рис. 26).
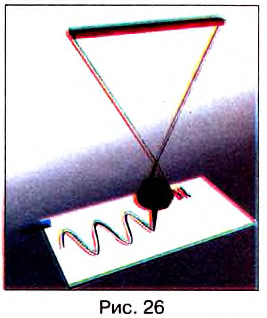
Установим в отверстие грузика фломастер, выведем грузик из положения равновесия и отпустим. Маятник колеблется, а фломастер, касаясь листа картона, который мы равномерно протягиваем во время колебаний, оставляет на нём след.
В результате опыта получаем график колебаний маятника в виде начерченной линии (рис. 27), т. е. зависимость отклонения маятника от времени. Позже будем подробно изучать эту важную волнистую линию, называемую синусоидой.
Как видно из рисунка 27, маятник в определенный момент отклоняется от положения равновесия на некоторое максимальное расстояние. Это отклонение маятника назвали амплитудой колебаний.
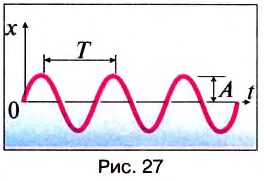
Амплитуда колебаний – это наибольшее отклонение тела от положения равновесия.
Амплитуду колебаний обозначают большой латинской буквой А. Её единицей в СИ является один метр (1 м). Значение амплитуды зависит только от того, на какое расстояние тело было отведено от положения равновесия до начала колебаний.
Маятник выполняет одно полное колебание за определённое время. Продолжительность одного полного колебания называют периодом колебаний.
Период колебаний – это наименьший интервал времени, через который определённое состояние движения тела полностью повторяется.
Период колебаний обозначают большой латинской буквой Т. Его единицей в СИ является одна секунда (1 с).
Если за время t произошло N полных колебаний, то, чтобы определить период Т, нужно t поделить на N, т. е.:  .
.
Опыт 3.
Возьмём маятник, как в опыте 2, но подвесим грузик на нить большей длины. Потом так же запишем график колебаний нового маятника и сравним его с (графиком в опыте 2. Увидим, что чем больше длина маятника, тем больше период его колебаний (рис. 28).
Период колебаний маятника зависит от его длины. Чем длиннее маятник, тем больше период его колебаний.
Если выполнить опыты с пружинным маятником, который состоит из пружины и подвешенного к нему тела, то окажется, что чем больше масса подвешенного к пружине тела, тем больше период колебаний пружинного маятника.
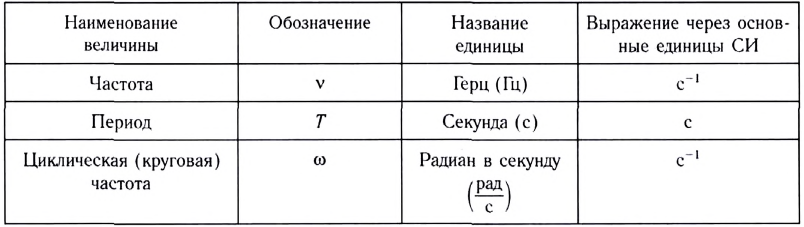
Колебания характеризуются также частотой колебаний, которая обозначается греческой буквой  (ню).
(ню).
Частота колебаний определяется числом колебаний, выполненных системой за единицу времени.
Если за время t произошло N колебаний, то, чтобы определить частоту  , нужно N разделить на t , т. е.:
, нужно N разделить на t , т. е.:
 , или
, или  .
.
Частота и период колебаний связаны обратно пропорциональной зависимостью, поэтому:
 ,
,
где Т— период колебаний; – частота колебаний.
Единицей частоты в СИ является один герц (1 Гц). 1 Гц = 1  . Она названа так в честь известного немецкого физика Генриха Герца. Если частота колебаний
. Она названа так в честь известного немецкого физика Генриха Герца. Если частота колебаний  = 1 Гц, то это означает, что происходит одно колебание в секунду. Приблизительно с такой частотой бьётся человеческое сердце. Если
= 1 Гц, то это означает, что происходит одно колебание в секунду. Приблизительно с такой частотой бьётся человеческое сердце. Если  = 50 Гц, то происходят 50 колебаний в секунду.
= 50 Гц, то происходят 50 колебаний в секунду.
Кстати:
Исследования показали, что сердце мыши совершает 600 ударов в минуту, а кита – 15 ударов в минуту. Тем не менее оба сердца сокращаются за время жизни животного около 750 млн раз.
Пример задачи:
Если при вращении шлифовального круга скорость движения точек на его краю равна 95  , то возникает опасность разрыва круга. Можно ли этот круг радиусом 20 см вращать с частотой 100
, то возникает опасность разрыва круга. Можно ли этот круг радиусом 20 см вращать с частотой 100  ?
?
Дано:
 = 95
= 95
 = 20см
= 20см
 = 100
= 100
 = ?
= ?
Решение:
По условию задачи — значение скорости, при которой возникает опасность разрыва круга; – значение скорости, которую будут иметь точки на краю круга, определяем по формуле 
Для одного оборота путь  , где
, где  = 3,14;
= 3,14;
 , а
, а  ,
,  тогда
тогда  .
.
Подставив значения, получим:

Ответ: полученное значение скорости больше того, при котором возникает опасность разрыва. Значит, шлифовальный круг нельзя вращать с частотой 100  .
.
Колебательные движения -амплитуда, период и частота колебаний
Колебания – самая распространенная форма движения в окружающем мире и технике. Колеблются деревья под действием ветра, поршни в двигателе автомобиля и т. п. Мы можем разговаривать и слышать звуки благодаря колебаниям голосовых связок, воздуха и барабанных перепонок. Колеблется сердце. Все это примеры механических колебаний. Свет – это тоже колебания, но электромагнитные. С помощью электромагнитных колебаний, распространяющихся в пространстве, осуществляют радиосвязь, радиолокацию, телевидение, а также лечат различные болезни.
На первый взгляд, приведенные примеры колебаний имеют мало общего. Однако при их исследовании выяснилось, что разные по природе колебания описываются одинаковыми математическими уравнениями, что значительно облегчает их изучение.
Как же возникают механические колебания? Рассмотрим движение шара с отверстием, прикрепленного к одному концу зафиксированной пружины на горизонтально расположенном стержне. Второй конец пружины закреплен в стене (рис. 21). Пусть в начальный момент шар находится в положении равновесия ОО’ . Рассмотрим идеальный случай, когда в данной системе отсутствует трение, то есть механическая энергия не уменьшается.
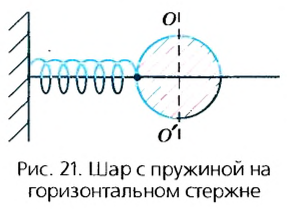
Переместим шар вправо от положения равновесия, пружина при I этом растянется. Если шар отпустить, пружина заставит его двигаться к положению равновесия. Поскольку в системе трения нет, то шар пройдет положение равновесия и, двигаясь влево, сожмет пружину. Достигнув крайнего левого положения, шар будет двигаться вправо и вернется в крайнее правое положение. Пружина при этом опять будет максимально растянутой. В данном случае шар выполнит одно полное колебание. В дальнейшем в идеальной системе (без трения) такие колебания будут совершаться как угодно долго.
Очевидно, что отличительной особенностью колебаний является их периодичность. Но периодичными являются и вращательные движения. В отличие от вращательных движений, у которых для каждой точки имеются траектории в виде окружности, во время колебательных движений точка или тело двигаются в противоположных направлениях по одной и той же траектории.
В колебательном движении точка (тело) проходит все точки траектории движения (кроме двух крайних точек) дважды – один раз в одном направлении, второй – в обратном.
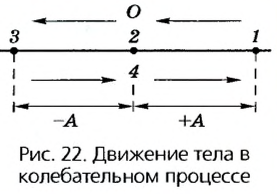
На рисунке 22 изображено одно полное колебание шара с пружиной. Движение осуществляется в такой последовательности от точки к точке:

и опять повторяется.
Максимальное отклонение колеблющегося тела от положения равновесия называется амплитудой колебания тела (на рис. +А и -А).
Время, в течение которого осуществляется одно полное колебание тела, называется периодом колебания тела Т.
Основной единицей периода колебаний является секунда.
Частота колебаний измеряется в единицах в секунду. Эта единица Частота колебаний называется герц (Гц) в честь немецкого физика Генриха Герца, который в 1884 г. экспериментально доказал существование электромагнитных волн.
Частота колебаний f* показывает какое количество колебаний совершает тело за единицу времени.
Период колебания тел Т связан с частотой их колебаний f соотношением:

Карта колебательного движения
Механическое колебательное движение. Одно из наиболее распространенных движений в природе – механическое колебательное движение.
Механическое колебательное движение – это полностью или частично повторяющееся движение тела в противоположных направлениях около положения устойчивого равновесия. Другими словами: механическое колебательное движение – это перемещение то в одном, то в другом направлении вокруг положения равновесия тела или системы тел.
Колебательное движение может быть периодическим и непериодическим:
Периодическое колебательное движение — это колебания тела или системы тел, повторяющиеся через одинаковые промежутки времени.
Непериодическое колебательное движение — это колебания тела или системы тел, повторяющиеся через произвольные промежутки времени. У таких колебаний определенных периодов нет.
Периодические колебания в основном бывают двух видов: вынужденные и свободные колебания.
Вынужденные колебания — это колебания, возникающие в результате воздействия внешней периодически изменяющейся силы.
Свободные колебания — это колебания, возникающие в результате действия внутренних сил замкнутой системы.
Свободные колебания:
Для простоты проведения измерений и вычислений при изучении колебательного движения удобно воспользоваться замкнутой системой. В замкнутой системе тела совершают колебательные движения в результате действия внутренних сил.
Колебания груза, прикрепленного к пружине (система пружина-груз), или тела, подвешенного на нити (система нить-тело), можно отнести к свободным колебаниям. Внутренней силой в системе пружина-груз является сила упругости пружины, в системе нить-тело – сила тяжести, действующая на тело.
Кинематические характеристики колебательного движения. Ознакомимся с некоторыми из них.
Смещение — это физическая величина, показывающая, в какую сторону и на сколько удаляется от положения равновесия колеблющееся тело за определенный промежуток времени. Например, предположим, что тело массой  совершает повторяющиеся периодические движения вокруг точки равновесия
совершает повторяющиеся периодические движения вокруг точки равновесия  вправо и влево от нее, вдоль оси
вправо и влево от нее, вдоль оси  Координата тела
Координата тела  в данный момент времени
в данный момент времени  показывает смещение этого тела от его положения равновесия (а).
показывает смещение этого тела от его положения равновесия (а).
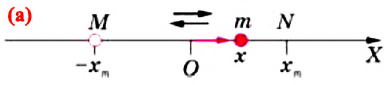
Амплитуда – это наибольшее смещение колеблющегося тела от положения равновесия. Амплитуда обозначается  или
или  а единица ее измерения в СИ—метр (м).
а единица ее измерения в СИ—метр (м).
Если тело, двигаясь вправо от точки равновесия  смещается на амплитуду
смещается на амплитуду  (точка
(точка  затем, остановившись на мгновение, возвращается в точку
затем, остановившись на мгновение, возвращается в точку  движется влево, смещаясь до точки с координатой –
движется влево, смещаясь до точки с координатой –  (точка
(точка  и остановившись в этой точке на мгновение, снова вернется в точку то это движение тела называется одно полное колебание (см: а). Таким образом, тело за время одного полного колебания проходит путь, равный 4 амплитудам:
и остановившись в этой точке на мгновение, снова вернется в точку то это движение тела называется одно полное колебание (см: а). Таким образом, тело за время одного полного колебания проходит путь, равный 4 амплитудам:

Если тело за промежуток времени  совершит
совершит  колебаний, то пройденный им путь будет равен:
колебаний, то пройденный им путь будет равен:

Где  (ню) — частота колебаний,
(ню) — частота колебаний,  — период колебаний.
— период колебаний.
Частота колебаний -это физическая величина, численно равная числу колебаний за одну секунду:

За единицу измерения частоты колебания в СИ принята величина, названная в честь немецкого ученого Генри Герца, герц (1Гц). 1 Гц – это частота таких колебаний, при которых за 1с совершается 1 колебание: 
Период колебаний – это время, за которое совершается одно полное колебание:

Единица измерения периода в СИ – секунда (1 с): 
Период и частота колебаний — взаимно обратные величины:
 или
или 
Циклическая частота, являясь величиной в  раза большей частоты колебаний, показывает, сколько колебаний совершает тело за 6,28 секунды
раза большей частоты колебаний, показывает, сколько колебаний совершает тело за 6,28 секунды 

Здесь  (омега) — циклическая частота. Единица измерения циклической частоты в СИ:
(омега) — циклическая частота. Единица измерения циклической частоты в СИ:
Гармоническое колебание и его график:
Самым простым колебательным движением является гармоническое колебание.
Гармонические колебания – это колебания, при которых величины, характеризующие движение, изменяются со временем по закону синуса или косинуса.
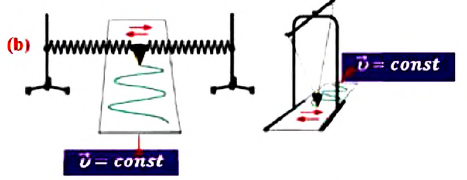
Изменения положения тела, совершающего свободные гармонические колебания, описываются кривой, которая является синусоидой или косинусоидой. Кривую синусоиды (или косинусоиды) с легкостью можно наблюдать во время проведения опыта как с пружинным, так и с нитевым маятником, представляющим собой наполненную песком воронку с небольшим отверстием внизу (b).
Эта кривая соответствует графику изменения перемещения маятника  от времени
от времени  по закону синуса или косинуса (с):
по закону синуса или косинуса (с):

или

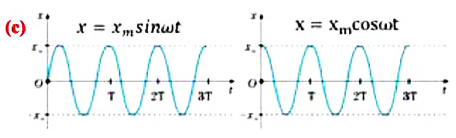
Из графика видно, что за время, равное периоду колебания маятник совершает одно полное колебание (см: с).
Кстати:
Отсутствие действия внешних сил на замкнутую систему приводит к тому, что ее полная механическая энергия не изменяется. Это означает, что в идеальных условиях амплитуда свободных колебаний в замкнутой системе не изменяется, то есть колебания не затухают. Однако в реальности свободные колебания затухают — под действием сил трения с течением времени полная механическая энергия системы уменьшается, то есть уменьшается амплитуда колебаний и колебания затухают (d).
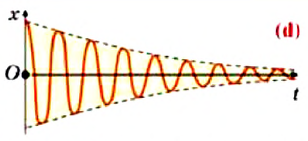
Затухающие колебания – это колебания в замкнутой колебательной системе, в которой в результате действия сил трения происходит постепенное уменьшение полной механической энергии системы и уменьшение амплитуды колебаний.
Всё о колебательном движение
При равномерном вращении материальной точки по окружности радиусом R с угловой скоростью  угол поворота
угол поворота материальной точки изменяется со временем по закону
материальной точки изменяется со временем по закону  . При таком движении центростремительное (нормальное) ускорение материальной точки направлено к центру окружности и вычисляется по формуле
. При таком движении центростремительное (нормальное) ускорение материальной точки направлено к центру окружности и вычисляется по формуле  где v — модуль линейной скорости.
где v — модуль линейной скорости.
Положение механической системы, в котором равнодействующая всех действующих сил равна нулю, называется положением равновесия.
Колебательным движением (колебаниями) называют всякий процесс, который обладает свойством повторяемости во времени. Периодическим называется движение, при котором физические величины, характеризующие его, через равные промежутки времени принимают одни и те же значения. Периодическое движение называется колебательным, если тело или материальная точка движется вблизи устойчивого положения равновесия, отклоняясь то в одну, то в другую сторону. При этом через любую точку траектории, за исключением крайних, тело проходит как в прямом, так и в обратном направлении. Следовательно, отличительным признаком колебательного движения является его возвратность.
Например, механическим колебательным движением является движение тела, подвешенного на нити, движение груза на пружине. Колебания могут быть не только механическими, но и электромагнитными (периодические изменения напряжения и силы тока в цепи), термодинамическими (колебания температуры с течением времени).
Таким образом, колебания — это особая форма движения. Его особенностью является тот факт, что различные по своей природе физические процессы (механические, электромагнитные и т. д.) описываются одинаковыми математическими зависимостями физических величин от времени.
Опыт показывает, что для возникновения и существования механических колебаний в некоторой системе необходимо выполнение определенных условий. Прежде всего, при выведении (например, при малом смещении) тела из положения равновесия в системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия. Кроме того, в системе должно существовать достаточно малое трение, поскольку в противном случае колебания быстро затухнут или могут не возникнуть вообще.
Рассмотрим движение небольшого тела М, которое будем считать материальной точкой (рис. 1), по окружности радиусом R с постоянной по модулю линейной скоростью  . Пусть рассматриваемое движение происходит против хода часовой стрелки.
. Пусть рассматриваемое движение происходит против хода часовой стрелки.
Если в начальный момент времени  = 0 материальная точка находилась в положении то через промежуток времени
= 0 материальная точка находилась в положении то через промежуток времени  = t –
= t – она окажется в некотором положении М. Обозначим координату материальной точки в этом положении через х. Координата х на рисунке соответствует координате точки В на оси Ох.
она окажется в некотором положении М. Обозначим координату материальной точки в этом положении через х. Координата х на рисунке соответствует координате точки В на оси Ох.
Поскольку при движении точки М по окружности ее координата х будет периодически изменяться от +R до -R, то можно сказать что точка В совершает колебательное движение вдоль оси Ох, а ее координата х является координатой колеблющейся точки.
Соответственно, проекция  линейной скорости
линейной скорости  материальной точки на ось Ох в данный момент времени является скоростью точки В, а проекция а, ее центростремительного ускорения
материальной точки на ось Ох в данный момент времени является скоростью точки В, а проекция а, ее центростремительного ускорения  — ускорением точки В.
— ускорением точки В.
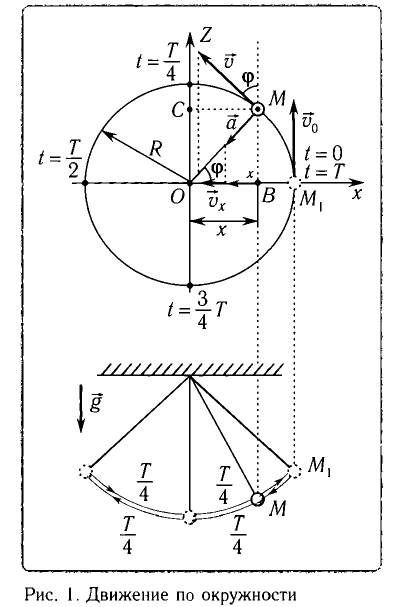
Радиус, соединяющий движущуюся точку М с центром окружности О, за промежуток времени повернулся на угол  , называемый фазовым углом или просто фазой. Из рисунка видно, что
, называемый фазовым углом или просто фазой. Из рисунка видно, что

Если  — угловая скорость движения материальной точки, а начальный момент движения = 0, то
— угловая скорость движения материальной точки, а начальный момент движения = 0, то
где Т — период ее вращения по окружности.
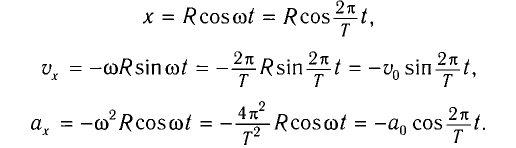
Тогда координату x, проекцию скорости  и проекцию ускорения
и проекцию ускорения  точки В в любой момент времени можно определить по формулам:
точки В в любой момент времени можно определить по формулам:
Поскольку функции  периодические, то через промежуток времени Т, по истечении которого угол
периодические, то через промежуток времени Т, по истечении которого угол  изменится на
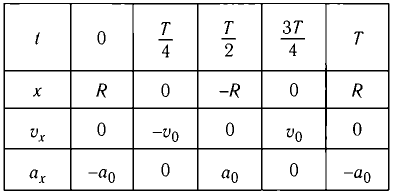
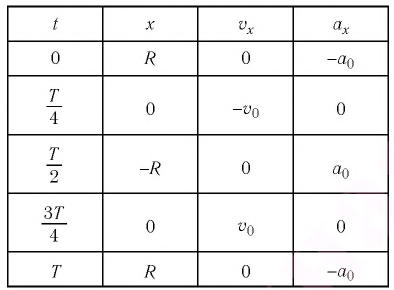
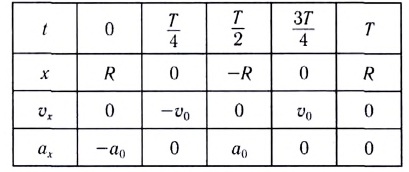
изменится на  , все характеристики движения точки В вдоль оси Ох (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1). Точка В в течение этого промежутка времени дважды проходит через центр окружности, двигаясь в противоположных направлениях вдоль оси Ох (см. рис. 1). Как уже отмечалось, возвратность — основной признак колебательного движения.
, все характеристики движения точки В вдоль оси Ох (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1). Точка В в течение этого промежутка времени дважды проходит через центр окружности, двигаясь в противоположных направлениях вдоль оси Ох (см. рис. 1). Как уже отмечалось, возвратность — основной признак колебательного движения.
Таблица I
Координата х, проекция скорости  и проекция ускорения
и проекция ускорения  тела, движущегося по окружности, в различные моменты времени t
тела, движущегося по окружности, в различные моменты времени t
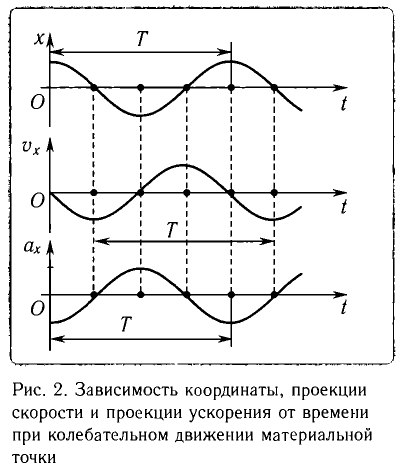
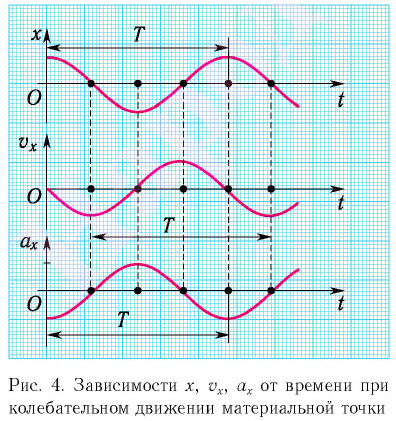
Зависимость координаты х, проекции скорости и проекции ускорения от времени t (промежутка времени) показаны на рисунке 2.
Наиболее важными величинами, характеризующими механические колебания, являются:
x(t) — координата материальной точки или ее отклонение из положения равновесия в момент времени t:

гдe f(t) — заданная периодическая функция времени t,T— период этой функции;
А (А > 0) — амплитуда — максимальное смещение  тела или системы тел из положения устойчивого равновесия;
тела или системы тел из положения устойчивого равновесия;
т =  — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь t — время совершения N полных колебаний.
— период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь t — время совершения N полных колебаний.
В СИ основной единицей периода (времени) является секунда (1 с).
v — частота — число полных колебаний, совершаемых в единицу времени:
В СИ основной единицей частоты является герц (1 Гц). 1 Гц равен частоте, при которой за 1 с тело совершает одно полное колебание (1 Гц= 1  ).
).
 — циклическая частота — число полных колебаний, совершаемых за промежуток времени
— циклическая частота — число полных колебаний, совершаемых за промежуток времени  , равный
, равный  секунд:
секунд:
В СИ основной единицей циклической частоты является радиан в секунду (1 )
)
 — фаза — аргумент периодической функции, определяющий значение физической величины в любой момент времени t. Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной амплитуде. Единицей фазы является радиан (1 рад).
— фаза — аргумент периодической функции, определяющий значение физической величины в любой момент времени t. Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной амплитуде. Единицей фазы является радиан (1 рад).
 — начальная фаза, определяющая состояние колебательной системы в начальный момент времени (
— начальная фаза, определяющая состояние колебательной системы в начальный момент времени ( = 0).
= 0).
Колебания, при которых координата (смещение) тела со временем изменяется по закону косинуса

или синуса

называются гармоническими.
Зависимость координаты от времени x{t) называется кинематическим законом гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени. Систему (тело), которая совершает гармонические колебания, называют гармонической колебательной системой или гармоническим осциллятором.
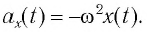
Обратим внимание на то, что координата  и проекция ускорения
и проекция ускорения  точки В (см. рис. 1) в любой момент времени связаны соотношением
точки В (см. рис. 1) в любой момент времени связаны соотношением . Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению от положения равновесия и противоположна ему по знаку.
. Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению от положения равновесия и противоположна ему по знаку.
Данное соотношение, записанное в виде
 (1)
(1)
представляет собой уравнение гармонических колебаний (гармонического осциллятора).
Так как ускорение всегда обусловлено действием силы, то  т. е.
т. е.  При гармонических колебаниях проекция
При гармонических колебаниях проекция  силы, возвращающей тело в положение равновесия (х = 0), пропорциональна его координате:
силы, возвращающей тело в положение равновесия (х = 0), пропорциональна его координате:

Знак «минус» отражает возвратный характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
При достаточно малой амплитуде любые колебания можно приближенно считать гармоническими.
Положению равновесия тела соответствует точка х = 0, так как при этом равнодействующая сила, приложенная к нему, равна нулю ( ).
).
Различают несколько видов равновесия. Равновесие называется устойчивым, если при малом отклонении тела от положения равновесия возникают силы, возвращающие его в исходное положение. Равновесие называется неустойчивым, если при малом отклонении тела от положения равновесия возникают силы, вызывающие дальнейшее отклонение тела от положения равновесия. Равновесие называется безразличным, если при отклонении тела от положения равновесия равнодействующая сила остается равной нулю.
Примером устойчивого равновесия может служить равновесие небольшого шарика в сферической ямке, а примером неустойчивого — равновесие шарика на вершине сферической горки. Равновесие шарика на горизонтальной поверхности является безразличным.
Таким образом, колебания материальной точки являются гармоническими, если они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия и направленной к положению равновесия колеблющегося тела.
Если рассмотреть проекцию точки М на ось Оу (точка С на рис. 1), то ее координата y(t) будет совершать гармонические колебания вдоль оси Оу.
Таким образом, движение по окружности с постоянной по модулю линейной скоростью можно рассматривать как два гармонических колебательных движения, происходящих одновременно в двух взаимно перпендикулярных направлениях.
Пример №1
За какую часть периода тело, совершающее гармонические колебания, проходит расстояние: а) от среднего положения до крайнего; б) первую половину этого расстояния; в) вторую половину этого расстояния?
Решение
Координата х тела, совершающего гармонические колебания, определяется
соотношением
Здесь А — амплитуда, t — время, отсчитываемое с момента прохождения телом положения равновесия, Т — период колебаний, <р0 — начальная фаза. Будем считать, что  = 0, так как х(0) = 0.
= 0, так как х(0) = 0.
а) Промежуток времени  , необходимый телу для прохождения расстояния из среднего положения в крайнее, определяется из условия
, необходимый телу для прохождения расстояния из среднего положения в крайнее, определяется из условия
Откуда получаем
Тогда искомый промежуток времени

б) Промежуток времени  , необходимый телу для прохождения первой половины этого расстояния, определяется из условия
, необходимый телу для прохождения первой половины этого расстояния, определяется из условия

Откуда получаем
в) Промежуток времени  , необходимый телу для прохождения второй половины этого расстояния, определяется по формуле
, необходимый телу для прохождения второй половины этого расстояния, определяется по формуле
Ответ: 
Что такое колебательное движение
При движении материальной точки (МТ) по окружности радиусом  с постоянной угловой скоростью
с постоянной угловой скоростью  угол поворота
угол поворота  радиус-вектора МТ изменяется со временем по закону
радиус-вектора МТ изменяется со временем по закону  Центростремительное (нормальное) ускорение МТ направлено к центру окружности, и его модуль равен
Центростремительное (нормальное) ускорение МТ направлено к центру окружности, и его модуль равен  Тело находится в равновесии, если векторная сумма всех сил, приложенных к нему, и алгебраическая сумма моментов этих сил относительно любой оси равна нулю.
Тело находится в равновесии, если векторная сумма всех сил, приложенных к нему, и алгебраическая сумма моментов этих сил относительно любой оси равна нулю.
Движение, при котором все характеризующие его физические величины (например, координата  проекция скорости
проекция скорости  проекция действующей силы
проекция действующей силы  принимают одинаковые значения через равные промежутки времени
принимают одинаковые значения через равные промежутки времени  (рис. 1), называется периодическим.
(рис. 1), называется периодическим.
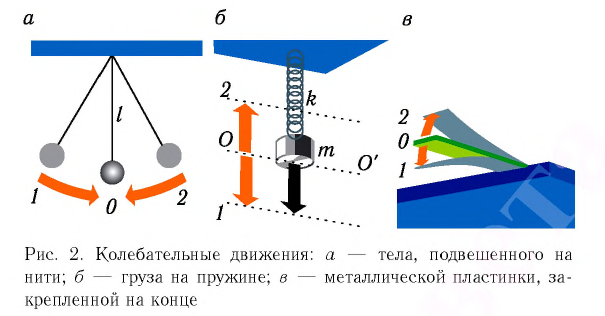
Периодическое движение является колебательным, если тело или материальная точка движется вблизи положения равновесия, отклоняясь от него то в одну, то в другую сторону. Например, механическим колебательным движением является движение тела, подвешенного на нити (рис. 2, а), а также движение груза на пружине (рис. 2, б) и металлической пластинки, один конец которой закреплен (рис. 2, в).
При этом через любую точку траектории (кроме крайних) тело проходит как в прямом, так и в обратном направлении.
Таким образом, колебательным называется периодическое движение (процесс), при котором любая характеризующая его физическая величина (например, координата) поочередно принимает то положительное, то отрицательное значение относительно положения устойчивого равновесия. Следовательно, периодическое колебательное движение (колебания) обладает свойством повторяемости во времени.
Подчеркнем, что по своей природе колебания могут быть не только механическими, но и электромагнитными (соответствуют изменениям напряжения и силы тока в электрической цепи), термодинамическими (соответствуют периодическим изменениям температуры системы с течением времени) и т. д.
Колебания — особая форма движения в том смысле, что различные по своей природе физические процессы (механические, электромагнитные и т. д.) описываются одинаковыми математическими зависимостями физических величин от времени.
Результаты экспериментов показывают, что для возникновения и существования механических колебаний необходимо выполнение определенных условий. Прежде всего, при выведении (например, при малом смещении) тела из положения равновесия в системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия. Кроме того, в системе не должно быть большое трение, поскольку в этом случае колебания быстро затухнут (вследствие потери энергии) или не возникнут вообще.
Рассмотрим равномерное вращение материальной точки  по окружности радиусом
по окружности радиусом  (рис. 3, а). Пусть рассматриваемое движение происходит против хода часовой стрелки. Выберем ось
(рис. 3, а). Пусть рассматриваемое движение происходит против хода часовой стрелки. Выберем ось  как показано на рисунке 3, а. Если в начальный момент времени
как показано на рисунке 3, а. Если в начальный момент времени  материальная точка находилась в положении
материальная точка находилась в положении  то через промежуток времени
то через промежуток времени  она окажется в некотором положении
она окажется в некотором положении 
Спроецируем на ось  радиус-вектор
радиус-вектор  движущейся точки, ее линейную скорость
движущейся точки, ее линейную скорость  и центростремительное ускорение
и центростремительное ускорение 
Проекция  радиус-вектора в положении
радиус-вектора в положении  (точка
(точка  является смещением материальной точки от центра окружности
является смещением материальной точки от центра окружности  вдоль оси
вдоль оси  (см. рис. 3, а). Следовательно, на оси
(см. рис. 3, а). Следовательно, на оси  этому смещению точки соответствует координата
этому смещению точки соответствует координата  точки
точки 
Поскольку при равномерном вращении точки  по окружности ее координата (смещение)
по окружности ее координата (смещение)  будет периодически изменяться от
будет периодически изменяться от  до
до  можно сказать, что точка
можно сказать, что точка  совершает колебательное движение вдоль оси
совершает колебательное движение вдоль оси  а ее координата
а ее координата  является координатой колеблющейся точки (рис. 3, б).
является координатой колеблющейся точки (рис. 3, б).
Соответственно, проекция линейной скорости материальной точки  на ось
на ось  является проекцией скорости
является проекцией скорости  точки
точки  и периодически изменяется от
и периодически изменяется от  а проекция ее центростремительного ускорения — проекцией ускорения
а проекция ее центростремительного ускорения — проекцией ускорения  точки
точки  которое также периодически изменяется от
которое также периодически изменяется от 
Радиус-вектор  за промежуток времени
за промежуток времени  повернулся на угол
повернулся на угол  (см. рис. 3, а). При равномерном вращении точки
(см. рис. 3, а). При равномерном вращении точки  по окружности ее линейная скорость
по окружности ее линейная скорость  направлена по касательной, а центростремительное ускорение
направлена по касательной, а центростремительное ускорение  — к центру окружности (см. рис. 3, а). Таким образом,
— к центру окружности (см. рис. 3, а). Таким образом,

С учетом того, что модуль линейной скорости  модуль центростремительного ускорения
модуль центростремительного ускорения 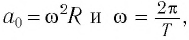 выполняются соотношения:
выполняются соотношения:

Где  – период вращения тела по окружности.
– период вращения тела по окружности.
Если при  материальная точка находилась в точке
материальная точка находилась в точке  то координату
то координату  проекции скорости
проекции скорости  и ускорения
и ускорения  точки
точки В в любой момент времени можно определить по формулам:
В в любой момент времени можно определить по формулам:
Таблица 1. Координата  проекции скорости
проекции скорости  и ускорения
и ускорения  тела, движущегося по окружности, в разные моменты времени
тела, движущегося по окружности, в разные моменты времени
Поскольку функции  периодические, то через промежуток времени, равный периоду
периодические, то через промежуток времени, равный периоду  по истечении которого угол
по истечении которого угол  изменится на
изменится на  все характеристики движения точки
все характеристики движения точки  вдоль оси
вдоль оси  (координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1), т. е. значения характеристик периодически повторяются.
(координата, проекция скорости и проекция ускорения) примут прежние значения (табл. 1), т. е. значения характеристик периодически повторяются.
Точка  в течение этого промежутка времени дважды проходит через начало координат, двигаясь в противоположных направлениях вдоль оси
в течение этого промежутка времени дважды проходит через начало координат, двигаясь в противоположных направлениях вдоль оси  (см. рис. 3, а). Как отмечалось выше, повторяемость — основной признак периодического движения.
(см. рис. 3, а). Как отмечалось выше, повторяемость — основной признак периодического движения.
Графики зависимостей координаты  проекции скорости
проекции скорости  и проекции ускорения
и проекции ускорения  от времени показаны на рисунке 4, где
от времени показаны на рисунке 4, где  — время, отсчитываемое от момента начала колебаний.
— время, отсчитываемое от момента начала колебаний.
Обратим внимание на то, что проекция ускорения  точки
точки  (см. рис. 3, а) в любой момент времени пропорциональна смещению (координате)
(см. рис. 3, а) в любой момент времени пропорциональна смещению (координате)  и противоположна ему по знаку:
и противоположна ему по знаку:
Перепишем данное соотношение в виде
Колебания, описываемые уравнением (1), являются гармоническими, а система, совершающая такие колебания, — гармонической колебательной системой, или гармоническим осциллятором (от лат. oscillo — качаюсь).
Уравнение (1) описывает гармонические колебания, при которых координата (смещение) тела от времени изменяется по закону косинуса:

или синуса:

где  — начальная фаза, которая определяет состояние колебательной системы в начальный момент времени,
— начальная фаза, которая определяет состояние колебательной системы в начальный момент времени,  — амплитуда колебаний.
— амплитуда колебаний.
Зависимость координаты от времени  (соотношения (2) и (3)) называется кинематическим законом (или уравнением) гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени.
(соотношения (2) и (3)) называется кинематическим законом (или уравнением) гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени.
Наиболее важными величинами, характеризующими механические периодические колебания, являются:
 — координата
— координата  (смещение из положения равновесия) в момент времени
(смещение из положения равновесия) в момент времени 

где  — заданная периодическая функция времени
— заданная периодическая функция времени  — период этой функции.
— период этой функции.
 — амплитуда колебаний — максимальное смещение
— амплитуда колебаний — максимальное смещение  тела или системы тел из положения устойчивого равновесия.
тела или системы тел из положения устойчивого равновесия.
 — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь
— период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. Здесь  — время совершения
— время совершения  полных колебаний.
полных колебаний.
В СИ единицей периода колебаний является 1 секунда (1с).
 — частота — число полных колебаний, совершаемых в единицу времени:
— частота — число полных колебаний, совершаемых в единицу времени:
В СИ единицей частоты колебаний является 1 герц (1 Гц). 1 Гц равен частоте колебаний тела, при которой за 1 с тело совершает одно полное колебание 
 — циклическая частота — число полных колебаний, совершаемых за промежуток времени
— циклическая частота — число полных колебаний, совершаемых за промежуток времени  равный
равный  секунд:
секунд:
В СИ единицей циклической частоты является 1 радиан в секунду 
 фаза (от греч.
фаза (от греч.  (фазис) — появление, момент явления) — аргумент периодической функции, определяющий значение физической величины в любой момент времени
(фазис) — появление, момент явления) — аргумент периодической функции, определяющий значение физической величины в любой момент времени  Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной частоте и амплитуде.
Она определяет состояние колебательной системы (координаты, скорости, ускорения) в любой момент времени при заданной частоте и амплитуде.
Единицей фазы является 1 радиан (1 рад).
 о — начальная фаза, которая определяет состояние колебательной системы в начальный момент времени
о — начальная фаза, которая определяет состояние колебательной системы в начальный момент времени 
Циклическая частота  гармонических колебаний зависит только от свойств системы, в которой происходят колебания, но не зависит от амплитуды колебаний. Амплитуда колебаний
гармонических колебаний зависит только от свойств системы, в которой происходят колебания, но не зависит от амплитуды колебаний. Амплитуда колебаний  и начальная фаза
и начальная фаза  определяются не свойствами самой системы, а тем способом, которым в системе вызваны колебания.
определяются не свойствами самой системы, а тем способом, которым в системе вызваны колебания.
Так как ускорение тела всегда обусловлено действием силы, то по второму закону Ньютона в проекции на ось  можно записать:
можно записать:

Следовательно, при гармонических колебаниях проекция силы  возвращающей тело в положение равновесия
возвращающей тело в положение равновесия  пропорциональна его смещению от этого положения (координате)
пропорциональна его смещению от этого положения (координате)  причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
Положению равновесия тела соответствует точка, в которой равнодействующая сил, приложенных к нему, равна нулю  Координату этой точки, как правило, принимают равной нулю
Координату этой точки, как правило, принимают равной нулю 
Различают несколько видов равновесия (рис. 5). Равновесие называется устойчивым, если при малом отклонении тела от положения равновесия возникают силы, возвращающие его в исходное положение. Равновесие
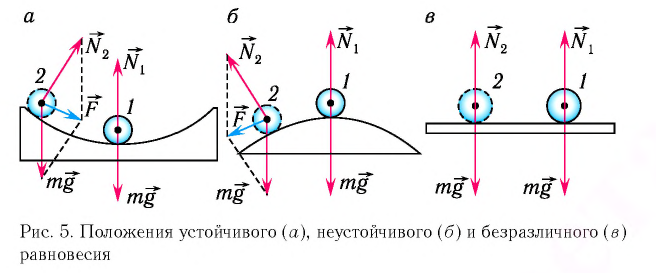
называется неустойчивым, если при малом отклонении тела от положения равновесия возникают силы, вызывающие дальнейшее отклонение тела от положения равновесия. Равновесие называется безразличным, если при отклонении тела от положения равновесия равнодействующая сила остается равной нулю. Примером устойчивого равновесия может служить равновесие небольшого шарика в сферической ямке, а неустойчивого — равновесие шарика на вершине сферической горки. Равновесие шарика на горизонтальной поверхности является безразличным.
Таким образом, колебания материальной точки могут возникать только вблизи положения устойчивого равновесия. Если при этом они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия, направленной к положению равновесия колеблющегося тела, то они будут гармоническими.
Заметим, что точно так же, как мы рассматривали изменение координаты х вращающейся по окружности материальной точки  можно рассматривать и изменение ее координаты
можно рассматривать и изменение ее координаты  (точка
(точка  (см. рис. 3, а). Следовательно, точка
(см. рис. 3, а). Следовательно, точка  будет совершать гармонические колебания вдоль оси
будет совершать гармонические колебания вдоль оси 
Значит, равномерное вращение материальной точки по окружности можно рассматривать как наложение двух одинаковых по амплитуде гармонических колебаний, которые происходят одновременно в двух взаимно перпендикулярных направлениях.
Пример №2
За какую часть периода тело, совершающее гармонические колебания, проходит расстояние: а) от положения равновесия до максимального смещения; б) первую половину этого расстояния; в) вторую половину этого расстояния?
Решение
Координата  тела, совершающего гармонические колебания, определяется соотношением:
тела, совершающего гармонические колебания, определяется соотношением:
Здесь  — амплитуда колебаний тела,
— амплитуда колебаний тела,  — время, отсчитываемое с момента прохождения телом положения равновесия,
— время, отсчитываемое с момента прохождения телом положения равновесия,  — период колебаний,
— период колебаний,  — начальная фаза.
— начальная фаза.
Пусть тело находится в положении равновесия в начальный момент времени  тогда
тогда 
а) Промежуток времени  необходимый телу для прохождения расстояния из среднего положения в крайнее
необходимый телу для прохождения расстояния из среднего положения в крайнее  определяется из уравнения:
определяется из уравнения:
Наименьшее значение  при котором выполняется это равенство, получается при
при котором выполняется это равенство, получается при
Отсюда искомый промежуток времени:

б) Промежуток времени  необходимый для прохождения первой половины этого расстояния
необходимый для прохождения первой половины этого расстояния  определяется из уравнения:
определяется из уравнения:

Отсюда

в) Промежуток времени  необходимый для прохождения второй половины этого расстояния, определяется из соотношения:
необходимый для прохождения второй половины этого расстояния, определяется из соотношения:
Ответ: 
Таким образом, для прохождения первой половины расстояния тело затрачивает в 2 раза меньше времени, чем для прохождения второй половины.
Основные характеристики колебательного движения
При движении материальной точки по окружности радиусом R с постоянной по модулю линейной скоростью v угол поворота  ее радиус-вектора изменяется со временем по закону
ее радиус-вектора изменяется со временем по закону  — угловая скорость. Такое движение характеризуется центростремительным (нормальным) ускорением, которое вычисляется по формуле
— угловая скорость. Такое движение характеризуется центростремительным (нормальным) ускорением, которое вычисляется по формуле 
Положение системы, при котором равнодействующая всех сил, приложенных к системе, равна нулю, называется положением равновесия.
Равновесие механической системы устойчиво, если при малом отклонении от положения равновесия система под действием внутренних сил возвращается в исходное положение.
Колебательным движением (колебаниями) называют всякий процесс, который обладает свойством повторяемости во времени. Периодическим называется движение, при котором физические величины, характеризующие колебательную систему, через равные промежутки времени принимают одни и те же значения. Периодическое движение называется колебательным, если тело (МТ) перемещается вблизи устойчивого положения равновесия, отклоняясь то в одну, то в другую сторону. При этом через любую точку траектории, за исключением крайних, тело проходит как в прямом, так и в обратном направлении. Следовательно, отличительным признаком колебательного движения является его возвратность.
Например, механическим колебательным движением является движение небольшого тела, подвешенного на нити, груза на пружине, поршня в цилиндре двигателя автомобиля. Колебания могут быть не только механическими, но и электромагнитными (периодические изменения напряжения и силы тока в цепи), термодинамическими (колебания температуры днем и ночью).
Таким образом, колебания — это особая форма движения. Ее особенностью является то, что разнородные по своей природе физические процессы, например механические и электромагнитные, описываются одинаковыми зависимостями физических величин от времени.
Для существования механических колебаний необходимо:
наличие силы, стремящейся возвратить тело в положение равновесия при малом смещении из этого положения;
- достаточно малое трение в системе, поскольку, в противном случае, колебания быстро затухнут или вообще не возникнут.
Рассмотрим простейшую модель колебательного движения. Небольшое тело, рассматриваемое как материальная точка (точка М), движется по окружности радиусом R с постоянной по модулю скоростью  (рис. 179) против хода часовой стрелки. Выберем ось Ох, как показано на рисунке. Если в начальный момент времени
(рис. 179) против хода часовой стрелки. Выберем ось Ох, как показано на рисунке. Если в начальный момент времени  тело находилось в точке
тело находилось в точке  а через промежуток времени
а через промежуток времени  — в точке М, то проекция радиус-вектора которой на ось Ох (точка В) будет равна х. Точка В при движении тела по окружности совершает колебательное движение вдоль оси Ох, и ее координата х является координатой колеблющегося тела.
— в точке М, то проекция радиус-вектора которой на ось Ох (точка В) будет равна х. Точка В при движении тела по окружности совершает колебательное движение вдоль оси Ох, и ее координата х является координатой колеблющегося тела.
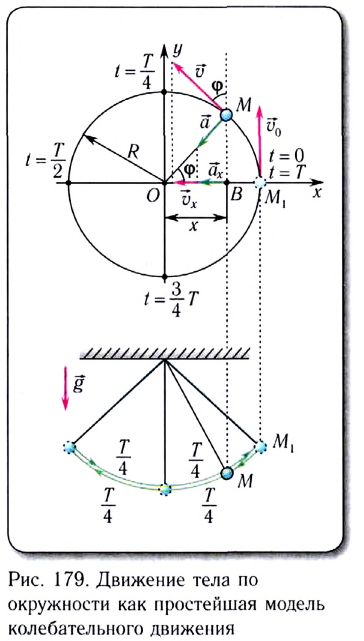
В соответствии с принципом независимости движений можно сказать, что проекция линейной скорости  тела на ось Ох дает проекцию скорости
тела на ось Ох дает проекцию скорости  перемещения точки В, а проекция центростремительного ускорения
перемещения точки В, а проекция центростремительного ускорения  тела на ось Ох — проекцию ускорения
тела на ось Ох — проекцию ускорения  точки В.
точки В.
Радиус-вектор точки М за время  повернулся на угол
повернулся на угол  называемый фазовым углом или просто фазой.
называемый фазовым углом или просто фазой.
Из рисунка 179 видно, что 
Если  — угловая скорость движения тела по окружности, то при
— угловая скорость движения тела по окружности, то при 
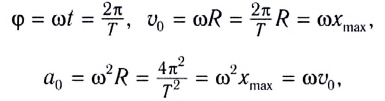
где Т — период движения тела по окружности.
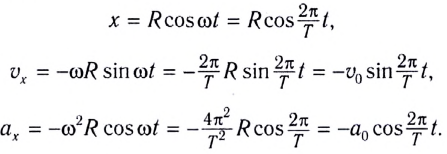
Тогда координату х, проекции скорости  и ускорения
и ускорения  в любой момент времени можно определить по формулам:
в любой момент времени можно определить по формулам:
Как известно, функции  — периодические. Это означает, что через промежуток времени Т, по истечении которого угол
— периодические. Это означает, что через промежуток времени Т, по истечении которого угол  изменится на
изменится на  все характеристики движения точки В вдоль оси Ох (координата, проекции скорости и ускорения) примут прежние значения (см. таблицу 3).
все характеристики движения точки В вдоль оси Ох (координата, проекции скорости и ускорения) примут прежние значения (см. таблицу 3).
Таблица 3
Координата х, модуль скорости v и модуль ускорения а тела, движущегося по окружности, в разные моменты времени
Точка В в течение этого промежутка времени дважды проходит через точку О (центр окружности), двигаясь в противоположных направлениях оси Ох (см. рис. 179). Как отмечалось выше, возвратность — основной признак колебательного движения.
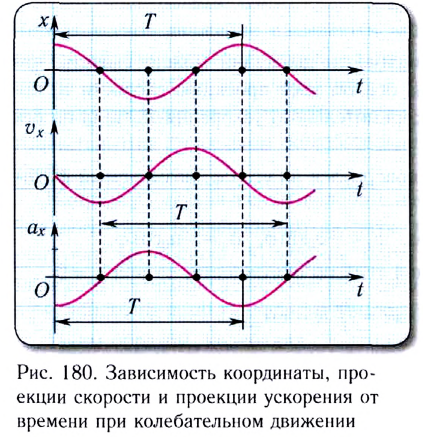
Зависимость координаты х, проекции скорости  и проекции ускорения
и проекции ускорения  от времени показана на рисунке 180.
от времени показана на рисунке 180.
Пусть t — время, отсчитываемое от момента начала колебаний. Наиболее важными величинами, характеризующими механические колебания, являются:
х(t) — координата тела (смещение тела из положения равновесия) в момент времени t:

где f(t) — заданная периодическая функция времени t, Т — период этой функции;
А (А > 0) — амплитуда — максимальное смещение  тела или системы тел из положения равновесия;
тела или системы тел из положения равновесия;
Т — период — длительность одного полного колебания, т. е. наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебание. В СИ единицей периода является секунда (1с);
v — частота — число полных колебаний в единицу времени:

В СИ единицей частоты колебаний является герц. Один герц равен частоте колебаний тела, при которой за одну секунду тело совершает одно полное колебание 
 — циклическая частота — число полных колебаний за промежуток времени
— циклическая частота — число полных колебаний за промежуток времени  равный
равный  секунд:
секунд:
В СИ единицей циклической частоты является радиан в секунду 
 — фаза — аргумент периодической функции, определяющий значение изменяющейся физической величины в данный момент времени /.
— фаза — аргумент периодической функции, определяющий значение изменяющейся физической величины в данный момент времени /.
Единицей фазы является радиан (1 рад);
 — начальная фаза, определяющая положение тела в начальный момент времени
— начальная фаза, определяющая положение тела в начальный момент времени 
Колебания, при которых зависимость координаты (смещения) тела от времени описывается формулами

называются гармоническими.
Зависимость координаты от времени x(t) называется кинематическим законом гармонических колебаний (законом движения), поскольку позволяет определить положение тела, его скорость, ускорение в произвольный момент времени. Систему (тело), которая совершает гармонические колебания, называют гармонической колебательной системой или одномерным гармоническим осциллятором.
Обратим внимание на то, что координата  и проекция ускорения
и проекция ускорения  точки В (см. рис. 180) в любой момент времени связаны соотношением
точки В (см. рис. 180) в любой момент времени связаны соотношением  Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению из положения равновесия и противоположна ему по знаку.
Это соотношение позволяет сделать вывод, что при гармонических колебаниях проекция ускорения точки прямо пропорциональна ее смещению из положения равновесия и противоположна ему по знаку.
Данное соотношение, записанное в виде

представляет собой уравнение гармонических колебаний (гармонического осциллятора).
Так как ускорение всегда обусловлено действием силы, то  т. е.
т. е.  При гармонических колебаниях модуль силы, возвращающей тело в положение равновесия (х = 0), пропорционален ее координате
При гармонических колебаниях модуль силы, возвращающей тело в положение равновесия (х = 0), пропорционален ее координате  причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
причем знак «минус» отражает «возвратный» характер возникающей силы. Как уже отмечалось, появление возвращающей силы при отклонении тела от положения равновесия является необходимым условием возникновения колебаний.
При достаточно малой амплитуде колебаний любой колебательный процесс можно приближенно считать гармоническим.
Положению равновесия соответствует точка х = 0, так как при этом сила, действующая на тело, равна нулю 
Таким образом, колебания материальной точки являются гармоническими, если они происходят под действием возвращающей силы, модуль которой прямо пропорционален смещению точки из положения равновесия и направлен к положению равновесия колеблющегося тела.
Уравнение гармонических колебаний можно получить и с помощью законов динамики, анализируя силы, действующие на систему. Подобное (динамическое) описание не содержит никаких сведений ни об амплитуде, ни о начальной фазе. Его необходимо дополнять начальными условиями, а именно: задавать положение тела и его скорость в начальный момент времени.
Заметим, что гармонические колебания вдоль оси Оу будет совершать и координата у тела, вращающегося по окружности с постоянной по модулю скоростью (см. рис. 179).
Движение по окружности с постоянной по модулю скоростью можно рассматривать как два гармонических колебательных движения, совершаемых в двух взаимно перпендикулярных направлениях.
Превращения энергии при колебательном движении
Механическая энергия системы равна сумме ее кинетической и потенциальной энергий. Кинетической энергией тело обладает вследствие своего движения, а потенциальная энергия определяется взаимодействием тела с другими телами или полями. Механическая энергия замкнутой системы, в которой не действуют силы трения (сопротивления), сохраняется.
Поскольку при одномерных колебаниях гармонического осциллятора силу трения не учитывают, то его механическая энергия сохраняется.
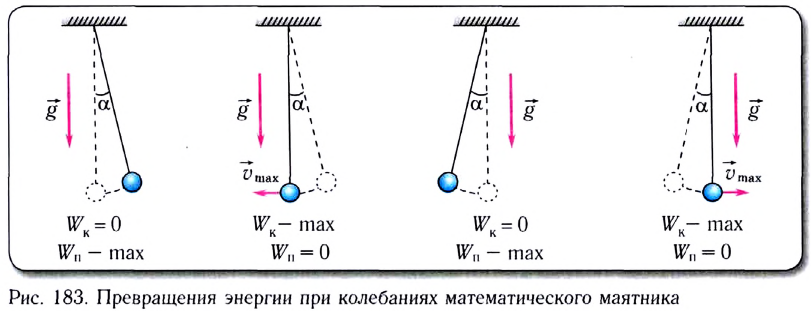
Рассмотрим превращения энергии при колебаниях математического маятника. Выберем систему отсчета таким образом, чтобы в положении равновесия его потенциальная энергия была равна нулю.
При отклонении маятника на угол  (рис. 183), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:
(рис. 183), соответствующий максимальному смещению от положения равновесия, потенциальная энергия максимальна, а кинетическая энергия равна нулю:

Поскольку в положении равновесия его потенциальная энергия равна нулю, то кинетическая энергия (а следовательно, и скорость) будет максимальна:

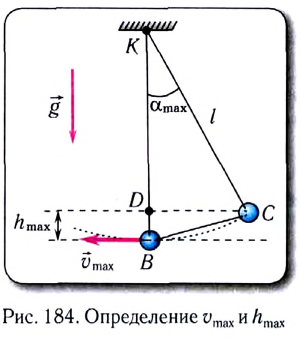
Из закона сохранения механической энергии следует (рис. 184), что

Отсюда найдем максимальную скорость маятника:

Высоту  можно выразить через длину маятника l и амплитуду колебаний А.
можно выразить через длину маятника l и амплитуду колебаний А.
Если колебания малы, то  Из треугольника KCD на рисунке 184 находим
Из треугольника KCD на рисунке 184 находим

Отсюда имеем

Подставив выражение для  в формулу (2), получим
в формулу (2), получим
Подставляя выражения для  в соотношение (1), находим
в соотношение (1), находим

Таким образом, в положении равновесия потенциальная энергия полностью переходит в кинетическую, а в положениях максимального отклонения кинетическая энергия полностью переходит в потенциальную.
В любом промежуточном положении

Покажем, что аналогичные превращения энергии имеют место и для пружинного маятника (рис. 185).
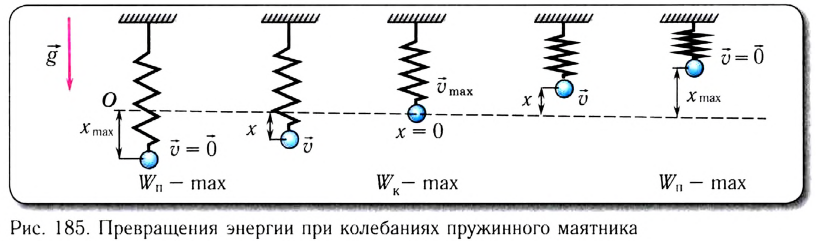
В крайних точках, когда  скорость равна нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
скорость равна нулю (v = 0) и кинетическая энергия груза полностью переходит в потенциальную энергию деформированной пружины:
Таким образом, получаем, что механическая энергия гармонического осциллятора пропорциональна квадрату амплитуды колебаний.
В положении равновесия, когда х = 0, вся энергия осциллятора переходит в кинетическую энергию груза:
где  — максимальная скорость при колебаниях.
— максимальная скорость при колебаниях.
В промежуточных точках полная энергия равна

Отсюда можно вывести выражение для проекции скорости  груза в точке с координатой х:
груза в точке с координатой х:
Так как максимальная скорость 
Затухающие колебания. Вынужденные колебания. Резонанс
Как Вам уже известно, механическая энергия одномерного гармонического осциллятора пропорциональна квадрату амплитуды его колебаний. В любой реальной системе всегда присутствуют силы трения (сопротивления), поэтому механическая энергия системы с течением времени уменьшается, переходя во внутреннюю энергию. Вместе с тем убыль полной энергии означает и уменьшение амплитуды колебаний.
Колебания, происходящие с постоянной во времени амплитудой, называются незатухающими колебаниями.
Примерами таких колебаний служат колебания математического и пружинного маятников, происходящие в отсутствие сил трения.
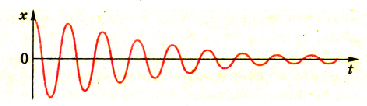
Колебания, амплитуда которых уменьшается с течением времени вследствие потери энергии колебательной системой, называются затухающими колебаниями (рис. 186, а, б).
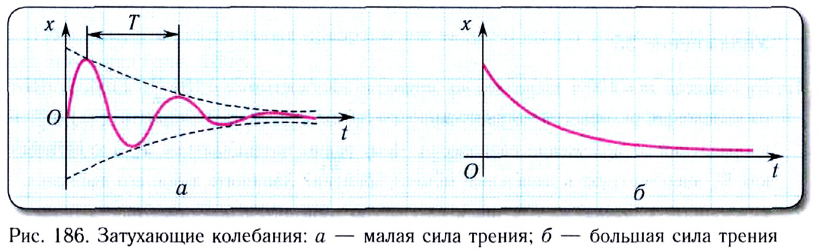
Уменьшение механической энергии системы (превращение ее в теплоту) происходит вследствие трения и сопротивления окружающей среды. Такие системы называют диссипативными (от латинского слова dissipation — рассеяние).
При малых потерях энергии колебания можно считать периодическими и пользоваться такими понятиями, как период и частота колебаний. Так, например, период — промежуток времени между двумя последовательными максимумами колеблющейся физической величины (см. рис. 186, а).
Незатухающие колебания, вызванные кратковременным внешним возбуждением, называются свободными или собственными. Они происходят под действием внутренних сил, возникающих в самой системе. Собственные колебания — это колебания, происходящие в отсутствии внешних воздействий на систему, со строго определенной частотой, называемой частотой собственных колебаний системы. Эта частота зависит только от параметров системы. Примерами таких колебаний могут служить колебания математического и пружинного маятников.
Любые собственные колебания в реальной системе рано или поздно затухают. Чтобы колебания не затухали, необходимо воздействие внешней силы. Однако не всякая внешняя сила заставляет систему двигаться периодически. Например, невозможно раскачать качели, если действовать на них с постоянной по модулю и направлению силой. Внешняя сила тоже должна быть периодической.
Колебания тел под действием внешней периодической силы (в частном
случае гармонической силы  в общем случае
в общем случае  называют вынужденными, а сила называется вынуждающей. Эксперименты показывают, что частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
называют вынужденными, а сила называется вынуждающей. Эксперименты показывают, что частота установившихся вынужденных колебаний всегда равна частоте вынуждающей силы.
Амплитуда колебаний и энергия, передаваемая системе за период вынужденных колебаний, зависят от того, насколько различаются частота вынуждающей силы  и частота собственных колебаний
и частота собственных колебаний  а также от величины трения в системе.
а также от величины трения в системе.
При вынужденных колебаниях возможно явление, называемое резонансом (от латинского слова resono — откликаюсь, звучу в ответ).
Резонанс — это явление резкого возрастания амплитуды вынужденных колебаний при действии на колебательную систему внешней силы с частотой, совпадающей с собственной частотой системы  (рис. 187).
(рис. 187).
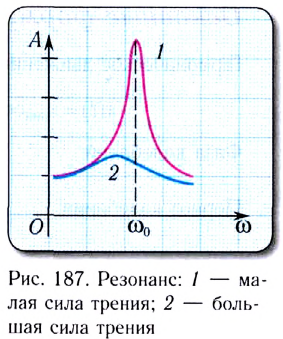
При резонансе создаются оптимальные условия для передачи энергии внешнего источника системе, так как в течение всего периода работа внешней силы источника над системой положительна. Вспомните процесс раскачивания на качелях: если качели толкать с очень большой частотой или с очень малой, их практически невозможно будет раскачать. Если же подбирать частоту толчков, близкую к частоте собственных колебаний качелей, то раскачивание будет эффективным.
Основные формулы:
Гармоническое движение:

Фаза колебаний:
Период колебания:

Циклическая частота 

Уравнение гармонических колебаний:
Период колебаний пружинного маятника:
Период колебаний математического маятника:
Единицы измерения основных величин колебаний
Колебательное движение и свободные колебания
Колебания – это любой процесс, в котором состояние тела или системы тел со временем повторяются. Колебания являются наиболее распространенной формой движения в природе.
Колебания – это любой процесс, повторяющийся во времени.
Колеблются деревья под действием ветра, поршни двигателя автомобиля под действием продуктов сгорания топлива. Мы можем разговаривать благодаря колебаниям голосовых связок гортани и слышать вследствие колебаний барабанных перепонок. Колебательным является биение сердца. C колебаниями связан и свет, который возникает при колебаниях молекул и атомов. C помощью электромагнитных колебаний, которые распространяются в пространстве, можно осуществлять радиосвязь, радиолокацию, лечить и диагностировать многие болезни.
В приведенных примерах колебаний на первый взгляд мало общего. Но при детальном исследовании приведенных примеров можно найти их общие свойства: различные по происхождению и природе колебания описываются одинаковыми уравнениями, имеют общие характеристики, это существенно облегчает их изучение и исследование.
Колебания бывают периодическими и непериодическими. Первые – это колебания, в которых состояние системы повторяются через одинаковые интервалы времени. В природе такие процессы практически не встречаются, но в теоретических исследованиях эти обобщения дают возможность вести продуктивные исследования.
Колебания, в которых состояние системы повторяется через одинаковые интервалы времени, называются периодическими.
Непериодические колебания не имеют постоянного периода колебаний и являются процессами, в которых состояние системы повторяется через произвольные и, как правило, неодинаковые интервалы времени. Такими, например, являются колебания веток дерева под действием порывов ветра.
Непериодические колебания не имеют постоянного периода колебаний.
Простейшими колебаниями являются так называемые гармонические колебания. Это колебания, в которых основные физические величины, касающиеся колебаний, изменяются по закону синуса или косинуса. Без изучения этих колебаний нельзя изучить более сложные колебания.
Колебания, в которых основные физические величины, касающиеся колебаний, изменяются по закону синуса или косинуса, называются гармоническими.
При изучении колебательных процессов для упрощения измерений и расчетов пользуются замкнутой системой, в которой тела взаимодействуют только в пределах определенной системы. Колебания, происходящие в замкнутой системе, называются свободными.
Примером свободных колебаний являются колебания пружинного маятника.
Пружинный маятник – это грузик некоторой массы т, укрепленный на конце пружины, которая в свою очередь укреплена неподвижно (рис. 3.1). Почему же этот маятник может колебаться? Отведем грузик от положения равновесия OO’ на расстояние +х. При этом согласно закону Гука возникнет сила упругости, которая будет действовать на тело в направлении равновесия: Fyпp = -kx.
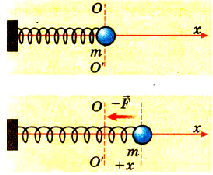
Рис. 3.1. Колебания пружинного маятника
Если освободить грузик, то он начнет двигаться до.положения равновесия с ускорением  . Согласно второму закону Ньютона
. Согласно второму закону Ньютона  .
.
В момент прохождения грузика через положение равновесия его скорость и кинетическая энергия будут максимальными (рис. 3.2).
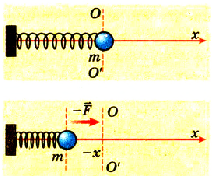
Рис. 3.2. Грузик движется влево
Имея определенную кинетическую энергию, грузик по инерции продолжает двигаться дальше (влево), выполняя работу по деформации пружины. Сила упругости, возникающая при этом, направлена к положению равновесия. Когда грузик окажется в крайнем левом положении, на него будет действовать сила упругости, направленная к положению равновесия (вправо). Под действием этой силы грузик начнет ускоренно двигаться до положения равновесия (вправо). Если предположить, что силы трения и сопротивления воздуха ничтожны, то процесс должен продолжаться бесконечно.
Записав совместно формулу второго закона Ньютона и закона Гука, получим уравнение движения грузика:

Отсюда,

В этом уравнении величина  всегда положительная, поскольку жесткость пружины и масса грузика не могут быть отрицательными. Поэтому эту величину обозначают символом
всегда положительная, поскольку жесткость пружины и масса грузика не могут быть отрицательными. Поэтому эту величину обозначают символом  , a уравнение движения тела па пружине записывают в виде
, a уравнение движения тела па пружине записывают в виде

Общее уравнение колебаний:

Решением этого уравнения является периодическая функция

где А – амплитуда колебаний; (ωt + а) – фаза;  – начальная фаза. Поскольку смещение грузика х происходит по закону синуса, то такие колебания являются гармоническими (рис. 3.3).
– начальная фаза. Поскольку смещение грузика х происходит по закону синуса, то такие колебания являются гармоническими (рис. 3.3).
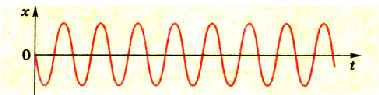
Puc. 3.3. График незатухающих гармонических колебаний
Воспользовавшись тем, что  получим формулу периода колебаний пружинного маятника:
получим формулу периода колебаний пружинного маятника:

Кроме смещения по гармоническим законам, изменяются скорость и ускорение движения груза.
Поскольку в реальных условиях в каждой системе действуют силы трения и сопротивления, то амплитуда колебаний будет постепенно уменьшаться (рис. 3.4).
Puc. 3.4. График свободных колебаний
Свободные колебания в реальных условиях всегда затухающие, поскольку в каждой колебательной системе, действуют силы трения. Поэтому каждая следующая амплитуда колебаний будет меньше предыдущей. Если бы удалось создать идеальную систему, в которой не действуют силы трения, то колебания в этой системе были бы незатухающими. Поскольку такие идеализации применяются в физике для исследования колебаний, то частоту незатухающих колебаний в идеальной системе назвали собственной частотой.
Частоту колебаний в идеальной системе, в которой отсутствуют силы трения, называют собственной частотой.
Пример №3
Определить период колебаний грузика, который имеет массу 100 г и подвешен к пружине, коэффициент упругости которой 10 Н/м.
|
Дано: |
Решение Для расчета периода колебаний пружинного маятника применяют формулу  Подставив в эту формулу значения физических величин, получим  |
| T – ? |
Ответ: период колебаний пружинного маятника равен 0,628 с.
- Заказать решение задач по физике
Колебательное движение и вынужденные колебания
Во многих технологических процессах происходят колебания, которые должны быть долговременными.
Поэтому создают условия для получения незатухающих колебаний. C этой целью в технических установках применяют вынужденные колебания. Это колебания, происходящие под действием внешней силы, которая периодически изменяется. Такими, например, являются колебания поршней в автомобильном двигателе, происходящие вследствие периодического действия газа во время рабочего хода поршня.
Вынужденными колебаниями является и переменный ток. который возникает в рамке, вращающейся в магнитном поле.
Частота вынужденных колебаний определяется частотой действия вынуждающей силы.
Регулируя подачу горючего в цилиндр, можно изменять частоту колебаний поршней. Частота переменного тока определяется скоростью вращения ротора турбины.
Особый интерес представляет случай, когда периодическая внешняя сила, действует па тело, которое может совершать свободные колебания.
Если в начальный момент тело было неподвижным, то после начала действия периодической силы оно начинает колебаться со все возрастающей амплитудой. Через некоторое время амплитуда устанавливается постоянной и в дальнейшем не возрастает.
Это происходит потому, что вся энергия, приходящая в колебательную систему, идет на выполнение работы по преодолению сил трения в системе. Если изменять частоту вынуждающей силы, то можно обнаружить явление резонанса. При частоте, равной собственной частоте колебаний системы, резко возрастает амплитуда. Сильно раскачать качели можно только в том случае, если подталкивать их будем «в такт» с частотой собственных колебаний качели. Явление резкого возрастания амплитуды вынужденных колебании называют резонансом.
Резонанс наступает тогда, когда частота действия вынуждающей силы будет равна собственной частоте колебаний системы.
fвын=fсоб
После повышения частоты выше резонансной амплитуда начнет убывать. Для каждой колебательной системы существует определенная частота, при которой наступает резонанс.
На рисунке 3.7 показана графическая зависимость амплитуды колебаний от частоты вынуждающей силы. Высота резонансной кривой, изображенной на этом рисунке, зависит от значения сил трения в колебательных системах. Так. график показывает, что резонансные частоты в трех колебательных системах одинаковые, но силы трения будут различными. Выше кривая меньше силы трения.
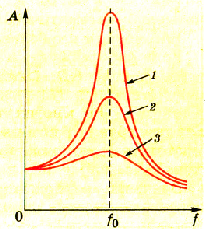
Рис. 3.7. Резонансные кривые для разных значений силы трения
C явлением резонанса мы встречаемся довольно часто и в быту, и в технике. Действие этого явления может быть как полезным, так и вредным. Так, чтобы выехать из лужи или песка, водитель с определенной частотой включает и выключает сцепление, раскачивая автомобиль. Увеличение амплитуды колебаний автомобиля содействует его выезду из выбоины.
Достоянием истории стала катастрофа с Бруклинским мостом в Нью-Йорке, который разрушился вследствие резонанса.
Колебательное движение и математический маятник
Одной из систем, которые могут совершать колебания, является нитяный маятник. Ото тело небольших размеров, подвешенное на длинной нерастяжёной нити. Выведенная из положения равновесия, эта система может совершать колебания.
Рассмотрим причины, вызывающие колебания в этой системе. Для удобства расчетов будем считать, что тело имеет размеры, намного меньшие длины нити, а отклонение от равновесия – небольшое. Маятник с такими ограничениями называют математическим.
Рассмотрим его более подробно.
Если система будет в равновесии, то на маятник будут действовать только сила тяжести и сила упругости нити. Их равнодействующая будет равна нулю (рис. 3.8). Естественно, что в таком случае шарик не будет двигаться.
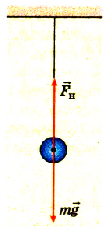
Рис. 3.8.Нитяный (математический) маятник в положении равновесия
Если груз вывести из положения равновесия, то равнодействующая F сил тяжести и упругости уже будет отличной от нуля (рис. 3.9).
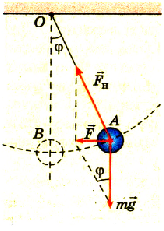
Pиc. 3.9. Равнодействующая сил тяжести и упругости направлена к положению равновесия
Значение равнодействующей определим по рисунку на основании анализа параллелограмма сил:

При малом угле отклонения  , где l – длина подвеса; х -смещение тела от положения равновесия.
, где l – длина подвеса; х -смещение тела от положения равновесия.
Применим к описанию движения математического маятника второй закон Ньютона с учетом, что смещение груза направлено в сторону» противоположную равнодействующей:

Отсюда
Величина  всегда положительная. Поэтому ее можно обозначить
всегда положительная. Поэтому ее можно обозначить  . Тогда уравнение движения математического маятника будет иметь вид:
. Тогда уравнение движения математического маятника будет иметь вид:  .
.
Математический маятник совершает гармонические колебания по уравнению, решением которого является функция: х = Аsin(ωt + а).
Из курса математики известно, что решением этого уравнения является функция х =Asin(ωt + а). Поскольку эта функция гармоническая, то и колебания математического маятника называют гармоническими.
По уравнению движения математического маятника можно найти формулу для расчета периода и частоты колебаний математического маятника. Для этого будем учитывать, что величина, обозначенная какω0, является угловой частотой и равна  . Здесь f – частота колебаний, T – период колебаний. Из уравнения движения получим
. Здесь f – частота колебаний, T – период колебаний. Из уравнения движения получим  . Или, подставив значение угловой частоты:
. Или, подставив значение угловой частоты:  . Отсюда
. Отсюда 
Таким образом, период колебаний математического маятника зависит от длины подвеса и ускорения свободного падения.
Период колебаний математического маятника зависит от длины подвеса и ускорения свободного падения:

Зависимость частоты колебаний математического маятника находят из соотношения
 ,
, 
Пример №4
Маятник длиной 150 см за 300 с совершает 122 колебания. Чему равно ускорение свободного падения?
|
Дано: |
Решение При такой длине маятник можно считать математическим. Связь между параметрами математического маятника устанавливает формула для периода колебаний  |
| g -? |
Согласно этой формуле 
Если учесть, что  а
а  то получим
то получим
Подставив значения физических величин, получим

Ответ: ускорение свободного падения в этом случае составляет 9,78  .
.
Энергия колебательного движения
В механике различают кинетическую и потенциальную энергии. Кинетическая энергия определяется массой тела и его скоростью.
Потенциальную энергию тела в поле земного тяготения определяют по формуле En = mgh, потенциальную энергию упруго деформированного тела (например, пружины) по формуле  .
.
Если внимательно рассмотреть движение грузика на пружине (см. рис. 3.1 и 3.2), то здесь периодически будут изменяться как скорость тела, так и сила упругости пружины. Таким образом, периодически будут изменяться как кинетическая, так и потенциальная энергии. Кинетическая энергия будет максимальной в момент прохождения телом положения равновесия, когда его скорость будет максимальной. Потенциальная энергия приобретет максимальное значение через четверть периода, кода будет максимальным отклонение от положения равновесия.
До сих пор мы рассматривали случаи колебаний, пренебрегая потерями механической энергии. Для этого случая действует закон сохранения механической энергии:
Соответственно этому закону максимальное значение потенциальной энергии будет при максимальном отклонении, когда кинетическая энергия (и скорость) равна нулю:
где А – максимальное отклонение тела от положения равновесия (амплитуда).
Если потери механической энергии в системе отсутствуют, то
Из последнего уравнения можно рассчитать скорость, с которой тело проходит положение равновесия.
Колебательное движение и механические волны
Колебания как процесс могут распространяться в пространстве. Для подтверждения этого подвесим на нити, закрепленной в штативе, несколько маятников и один из них приведем в колебательное движение (рис. 3.11).
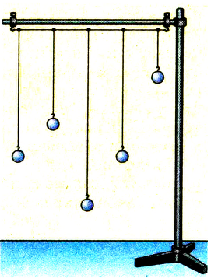
Рис. 3.11. Маятники на нити
Спустя некоторое время все маятники будут совершать колебания. Таким образом, механические колебания могут предаваться от одного тела к другому через упругие связи. Подобное происходит и в природе.
Если бросить камень в воду озера, то можно увидеть, как от него во все стороны распространяются круги-волны, в которых частицы воды колеблются в вертикальном направлении. Поплавок, плавающий рядом с точкой попадания камня, будет совершать только вертикальные колебания, не смещаясь в сторону. В данном случае происходит весьма сложный процесс. C одной стороны, частицы воды совершают колебания, перемещаясь в вертикальном направлении, а с другой – колебания распространяются в горизонтальном направлении. Но смещения частиц воды в горизонтальном направлении не происходит. Поэтому поплавок на воде хотя и колеблется, но к берегу не приближается.
Распространяются только колебания частиц воды – волны. Процесс распространения колебаний в упругой среде называют механической волной.
Как и любое другое физическое явление, волна имеет свои определенные характеристики.
Одной из величин, характеризующих волну, является скорость волны. Все известные науке волны распространяются не мгновенно, а на протяжении определенного времени, с определенной скоростью.
Каков же механизм образования волн?
Волна – процесс распространения колебаний.
Проанализировав рассмотренные ранее примеры, можно отметить, что механическая волна распространяется в упругой среде. Для того чтобы представить процесс распространения волны в упругой среде, промоделируем его с помощью шариков некоторой массы, соединенных между собой пружинками (рис. 3.12-а). Если сообщить определенный импульс левому крайнему шарику (рис. 3.12-б), то он начнет движение вверх, растягивая пружинку. Вследствие этого на второй шарик начнет действовать сила упругости растянутой пружинки, которая будет смещать шарик в том же направлении. Проявление инерции задержит движение второго шарика, который будет отставать от первого шарика (рис. 3.12-в).
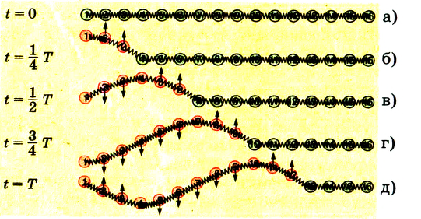
Pиc. 3.12. Модель процесса образования поперечной волны
Если первый шарик привести в колебательное движение, то второй также начнет колебаться, но с некоторым отставанием по фазе. Третий шарик под действием силы упругости второй пружинки также начнет колебаться, еще более отставая по фазе. В итоге все шарики будут колебаться с одинаковой частотой, но со сдвигом по фазе. При этом цепочкой побежит поперечная волна.
Если первому шарику придать импульс, направленный вдоль прямой, соединяющей оси шариков, то цепочкой распространится продольная волна. Ее можно наблюдать на длинной горизонтальной пружине, одним концом закрепленной на стене (рис. 3.13): после удара по торцу пружины образуются сгустки и разрежения витков, которые будут двигаться вдоль пружины как продольная волна.
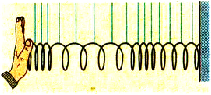
Pиc. 3.13. Распространение продольной волны
Если повторить модельный опыт образования волны в цепочке из пружинок и шариков (рис. 3.12), то можно заметить, что когда первый шарик проходит положение равновесия и движется вверх, то на определенном расстоянии от него существует шарик, который, проходя положение равновесия, также движется вверх, т. е. колебания совершаются в одной фазе.
Расстояние между двумя соседними точками волны, которые колеблются в одинаковой фазе, называют длиной волны (рис. 3.14). Например, это расстояние между двумя гребнями волны, образовавшейся от брошенного в воду камня. Длина волны обозначается буквой греческого алфавита λ (лямбда).
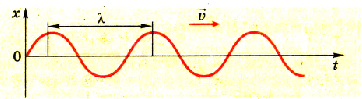
Puc. 3.14. Расстояние между двумя соседними точками волны. колеблющимися водной фазе
За один период она распространяется на расстояние, равное длине волны, Поэтому скорость распространения волны можно определить через эти величины:

Отсюда λ = υT.
Длина волны равна произведению скорости распространения на период: λ = υT.
Так как период связан с частотой формулой
Возможно иное определение длины волны: это расстояние, на которое распространяется волна за один период.
Длина волны является универсальной характеристикой для волновых процессов различной природы.
Пример №5
Лодка качается на волнах, распространяющихся со щ скоростью 2,5 м/с. Расстояние между гребнями волн 2,5 м. Найти период колебаний лодки.
Отсюда

Подставив значения физических величин, получим
Oтвет: период колебания лодки 3,2 с.
Колебательное движение и звуковые волны
Звук сопровождает человека на протяжении всей жизни. Он является основным средством общения между людьми, его используют в различных технологических процессах. Как вы знаете, источником звука является колеблющееся тело. Колеблются ножки камертона, излучая звук определенного тона, диффузор громкоговорителя, воссоздавая голос человека или звучание музыкального инструмента. Распространение этих колебаний и воспринимается нами как звук.
Звук является продольной волной, которая распространяется только в упругой среде, в частности в воздухе, воде, металлах, дереве, пластмассе и т. п.
Роль воздуха в распространении звука впервые была раскрыта в 1660 г. английским физиком Р. Бойлем, который открыл, что под колпаком вакуумного насоса, если из-под него выкачан воздух, звук не распространяется.
Звук начали исследовать очень давно. Поэтому для его характеристики применяют специфические величины. Так, высота тона, о которой говорят музыканты, обозначает частоту колебаний: чем больше частота, тем выше тон. Громкость звука связана с амплитудой колебаний: чем больше амплитуда, тем громче звук.
Звуковые волны имеют свойство отражаться от препятствий. Если звуковая волна падает на сплошное препятствие (стену, гору), то она отражается, и мы слышим эхо. Свойство отражаться используют инженеры создавая приборы для определения глубины воды под днищем корабля. Его назвали эхолотом, или эхолокатором (рис. 3.15).

Puc. 3.15. Схема объясняющая принцип действия эхолокатора
Излучатель посылает узкий импульсный пучок звуковых волн в сторону дна, я специальный микрофон улавливает отраженный сигнал. Измеряя интервал времени между посылкой и приемом сигнала, специальная аппаратура определяет расстояние до дна.
Человек слышит .звук только в определенном диапазоне частот. Считается, что человеческое ухо чувствительно к колебаниям частотой от 20 Гц до 20 кГц. Волны с частотой свыше 20 кГц называют ультразвуковыми^ а с частотой меньше 20 Гц – инфразвуковыми. Ни одни ни другие звуки человек не слышит. Но свойства этих волн используют в различных приборах и устройствах. Так, ультразвук применяют для стерилизации продуктов питания, очистки поверхности металлов и пластмасс от загрязнений, медицинских инструментов и приборов, пе выдерживающих высоких температур. В медицине используют ультразвуковые аппараты для исследований внутренних органов. Последнее время применяется ультразвуковой хирургический инструмент, позволяющий проводить бескровные операции.
Инфразвуки н целом отрицательно действуют на живой организм. Поэтому необходимо устранять их источники или применять профилактические меры безопасности. Так, на производствах, где производственные технологии связаны с применением мощных низкочастотных колебаний, используют различные средства изоляции рабочих от их воздействия. Например, известны случаи, когда установка нового мощного вентилятора не повысила производительности труда рабочих, а наоборот, повысила их утомляемость.
Колебательный контур и возникновение электромагнитных колебаний в колебательном контуре
Кроме механических колебаний, н природе существуют электромагнитные колебания. Они возникают в системе, которая называется колебательным контуром. Это электрическая цепь, состоящая из катушки индуктивности и конденсатора, соединенных между собой параллельно (рис. 3.16).
Колебательный контур – это электрическая цепь, состоящая из параллельно соединенных катушки индуктивности и конденсатора.
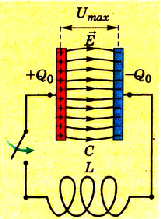
Pиc. 3.16. Cxerna колебательного контура
Обычно сопротивление проводников в такой цепи незначительно. Для получения колебаний в колебательном контуре сначала заряжают конденсатор, сообщая ему заряд Q0. Тогда в начальный момент времени между обкладками конденсатора возникает электрическое поле. Полная энергия контура в это время равна энергии заряженного конденсатора:
где Q0 – заряд конденсатора; C – его электроемкость.
При замыкании ключа конденсатор начинает разряжаться и в контуре возникает возрастающий по значению ток. Вследствие разряда конденсатора энергия электрического поля уменьшается; она превращается в энергию магнитного поля катушки, по которой проходит ток I:

где I – сила тока; L – индуктивность катушки.
В идеальном колебательном контуре полная энергия сохраняется и остается равной энергии электрического поля конденсатора после его зарядки. В любой произвольный момент времени она равна сумме энергий электрического поля конденсатора и магнитного поля катушки:
В момент времени, когда конденсатор полностью разрядится, энергия электрического поля становится равной нулю, а энергия магнитного поля достигает максимального значения:
После этого сила тока в контуре начинает уменьшаться, Уменьшается и магнитный поток. По закону электромагнитной индукции, изменению тока противодействует ЭДC самоиндукции, которая возникает при изменении магнитного потока. Поэтому конденсатор начинает перезаряжаться, и между его обкладками Снова возникает электрическое поле.
Когда перезарядка прекратится, на обкладках конденсатора будет заряд, равен первоначальному, по с противоположным знаком.
В дальнейшем процесс повторяется, но в обратном направлении. Через определенное время система возвращается в первоначальное положение, и начинается самопроизвольный цикл периодической зарядки и перезарядки конденсатора че- рез катушку. При отсутствии потерь па нагревание проводников и излучение колебания в колебательном контуре будут незатухающими.
В реальных условиях колебания в колебательном контуре будут затухающими. Поэтому их нужно считать свободными. Их период и частота зависят от параметров колебательного контура емкости конденсатора и индуктивности катушки. Выдающийся английский физик В. Томсон установил, что

 |
Уильям (Кельвин) Томсон (1824-1907) – выдающийся английский физик. Его научные труды касаются многих вопросов физики, математики и техники. Он широко применял термодинамический метод для объяснения физических явлений; продуктивно работал в области изучения электрических и магнитных явлений: известны его работы по теплопроводимости. |
Если колебательный контур включить в электрическую цепь переменного тока, то в нем возникнут вынужденные колебания, частота которых будет равна частоте переменного тока. Их амплитуда будет зависеть от сопротивления проводников контура и от соотношения между частотой переменного тока и собственной частотой контура. В случае совпадения этих частот в контуре будут возникать колебания, амплитуда которых резко возрастает. Таким образом, в колебательном контуре будет появляться резонанс. Это явление используют в радиоприемниках, когда с помощью настройки контура на определенную частоту’ принимают сигналы определенной станции. Изменяя индуктивность катушки или емкость конденсатора, мы изменяем собственную частоту контура. Если собственная частота контура совпадает с частотой определенного сигнала, в контуре, благодаря резонансу, возникает значительный ток, который передается в специальное устройство для дальнейшего усиления и обработки.
Образование электромагнитных волн
Электромагнитные колебания распространяются в пространстве в виде электромагнитных волн. В них происходят взаимные превращения электрического и магнитного полей, которые вместе образуют электромагнитное поле, распространяющееся в пространстве.
Процесс распространения электромагнитных колебаний называется электромагнитной волной.
Для образования электромагнитных волн, как и волн любой природы, необходимо иметь систему, в которой возникают электромагнитные колебания. Для электромагнитных колебаний такой системой будет колебательный контур, состоящий из конденсатора и катушки индуктивности.
Современные электронные системы позволяют поддерживать в нем незатухающие колебания на протяжении длительного времени, что в свою очередь создает условия для длительного излучения электромагнитных волн. По этому принципу работают вещательные радиостанции, телевидение и другие средства связи.
Однако сам по себе колебательный контур не может излучать электромагнитные волны, поскольку электрическое поле сосредоточено между обкладками конденсатора и вне контура не проявляется.
Переменные магнитные поля сосредоточены в основном внутри катушки и не распространяются за пределы контура. Исследования показали, что электромагнитные волны могут излучаться в пространство только открытым колебательным контуром, который в простейшем виде состоит из двух линейных проводников, связанных друг с другом катушкой индуктивности (рис. 3.17).

Рис. 3.17. Открытый колебательный контур
Для возбуждения электромагнитных колебаний в открытом контуре существуют различные способы. Наиболее распространенный из них способ, когда катушка индуктивности открытого контура образует индуктивную связь с контуром генератора незатухающих колебаний (рис. 3.18).
Рис. 3.17. Связь открытого контура с контуром генератора
Благодаря электромагнитной индукции в катушке открытого колебательного контура Le появляется переменная ЭДС, возбуждающая в проводниках переменный ток. Поскольку электроны, образующие переменный ток в проводниках, движутся ускоренно, то проводники открытого колебательного контура имеют переменное электромагнитное ноле.
Открытый колебательный контур, в котором происходят электромагнитные колебания, имеет переменные магнитное и электрическое поля. Так, переменное электрическое поле открытого колебательного контура индуцирует «собственное» переменное магнитное поле.
Переменное электрическое поле открытого колебательного контура будет индуцировать «собственное» переменное магнитное поле.
Индуцированное переменное мигни гное поле, в свою очередь, будет возбуждать индуцированное электрическое поле.
Таким образом, индукционные процессы будут охватывать все новые и новые точки, а обрадовавшееся
электромагнитное поле будет распространяться в пространстве. На расстоянии нескольких длин волны от открытого колебательного контура в пространстве уже будет распространяться единая электромагнитная волна, в которой будут происходить взаимообусловленные одновременные изменения электрического и магнитного полей – составляющих электромагнитного поля.
Графически электромагнитную волну можно изобразить в виде двух синусоид, расположенных во взаимно перпендикулярных плоскостях (рис. 3.19).
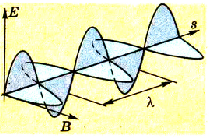
Puc. 3.19. Графическое изображение электромагнитные волны
Этот рисунок показывает существующую зависимость значений векторов напряженности электрического поля E и магнитной индукции В от расстояния в направлении распространения волны. По направлению эти векторы органически связаны между собой и с вектором скорости распространения волны  . Их колебания происходят во взаимно перпендикулярных плоскостях, причем вектор скорости
. Их колебания происходят во взаимно перпендикулярных плоскостях, причем вектор скорости  всегда перпендикулярен к плоскости колебаний векторов E и В, а его направление определяется по правилу правого винта.
всегда перпендикулярен к плоскости колебаний векторов E и В, а его направление определяется по правилу правого винта.
Если правый винт вращать в направлении от вектора E к вектору В кратчайшим путем, то его поступательное движение покажет направление вектора скорости
Аналитически колебательный процесс, которым является электромагнитная волна, представляется двумя уравнениями для модулей векторов Е и В:
где B0 и E0 – амплитуды волны; t – время наблюдения;  циклическая частота.
циклическая частота.
Таким образом, распространение электромагнитных волн происходит как возбуждение связанных между собой электрического и магнитного переменных полей в направлении, определяемом по правилу правого винта.
Шкала электромагнитных излучений
Во время исследований, длительное время проводившихся учеными, не обнаружили каких-либо ограничений относительно частоты или длины электромагнитного излучения. Т. е. нет смысла вести речь о самой короткой или самой длинной волне, ограничивая диапазон электромагнитных волн. Речь может быть лишь об определенном диапазоне воли, открытых и исследованных современной наукой.
Для наглядного представления о разнообразии электромагнитных излучений и зависимости их свойств от длины волны составлена шкала, один из вариантов которой представлен на форзаце. Они расположены по определенным условным диапазонам, не имеющим четких границ: низкочастотные волны, радиоволны, инфракрасное излучение, видимый свет, ультрафиолетовое, рентгеновское и гамма-излучение. Такое деление произведено с учетом природы их возникновения и особенностей взаимодействия с веществом. Например, если радиоволны образуются электромагнитными колебаниями, возбуждаемыми в колебательном контуре определенной емкости и индуктивности, чем и определяется длина волны, то гамма-излучение возникает как следствие ядерных процессов, связанных с радиоактивным распадом.
Существуют также отличия и во взаимодействии электромагнитных волн с веществом и в особенностях распространения в пространстве. Если видимый свет полностью поглощается топким слоем бумаги, то рентгеновское и гамма-излучения могут проникать не только через человеческое тело, но и через металлы.
Рассмотрим шкалу электромагнитного излучения подробнее.
Низкочастотное излучение возникает в результате работы различных электротехнических устройств и приборов, в которых используется переменный ток низкой частоты. Оно имеет низкую энергию и до сих пор не нашло практического применения ни в информационных, ни в энергетических технологиях.
Радиоволны разделены на диапазоны длинных, средних, коротких и ультракоротких волн. Поводом для такого деления послужили особенности их распространения.
В широком диапазоне радиоволны делятся на длинные, средние, короткие и ультракороткие.
Инфракрасное излучение называют также тепловым, так как оно наблюдается у всех нагретых тел.
В широком понимании оптический диапазон охватывает инфракрасное излучение, видимый свет и ультрафиолетовое излучение. Инфракрасное излучение лежит за пределами восприятия глазом волн, длина которых больше 760 нм и простилается к 0,1 мм. Их излучают все нагретые тела, благодаря чему мы ощущаем теплоту. При повышении температуры длина волны, на которую приходится максимум излучения, смещается в область более коротких волн. Инфракрасное излучение слабо поглощается воздухом и хорошо отражается от поверхности твердых тел. Это их свойство применяют в приборах «ночного видения».
Видимый свет – это тот диапазон волн, который воспринимается человеческим глазом. Установлено, что он довольно узкий, от 380 им до 760 нм. Волны различной длины этого диапазона воспринимаются как свет различных цветов. Свойства света очень разнообразны, многие из них станут вам понятны только после изучения последующих параграфов.
Со стороны коротковолновой части диапазона видимых волн находится диапазон ультрафиолетового излучения, которое не воспринимается человеческим глазом. Вместе с тем, взаимодействуя с веществом, это излучение может вызывать излучение видимого света. Нм этом основан метод неразрушающего анализа вещества, когда по цвету излучения определяют наличие тех или иных веществ в смеси. Широко известен способ применения ультрафиолетового излучения для выявления фальшивых денежных купюр.
Ультрафиолетовое излучение практически полностью поглощается обычным оконным стеклом.
Ультрафиолетовое излучение имеет сильное бактерицидное действие, его широко применяют для стерилизации, медицинских инструментов, различных медицинских материалов. Невозможно представить больничную палату без ламп, излучающих ультрафиолетовый свет.
Вместе с тем ультрафиолетовое излучение может отрицательно воздействовать на человеческий организм, попадая на кожу или слизистую оболочку. Оно вызывает ожоги, которые плохо поддаются лечению.
Рентгеновское излучение известно многим из нас как средство медицинского исследования организма. Впервые его получил и исследовал известный физик, украинец по происхождению И. Пулюй (1845-1918). Но случилось так, что первым сообщил об открытии немецкий физик В. Рентген (1845-1928). За это открытие ему позднее была присуждена Нобелевская премия в области физики.
Рентгеновское излучение имеет высокую проницательную способность, оно может проникать сквозь толстые слои вещества и даже металлов. Его используют в промышленности для выявления внутренних дефектов металлических изделий, в медицине для исследования внутренних органон человека, в научных исследованиях строения вещества.
Следующий диапазон — гамма-излучение — относится к ядерным процессам и связан с процессами, происходящими в атомных ядрах.
Радиоволны
Радиоволны принадлежат к диапазону электромагнитных ноли длиной от нескольких километров до нескольких десятков километров. В высокочастотной области диапазона радиоволны плавно переходят в инфракрасное излучение, хотя четкая граница не установлена. В своей низкочастотной части диапазона радиоволны граничат с низкочастотным излучением, которое образуется при работе электротехнических устройств, использующих переменный ток низкой частоты.
Радиоволны имеют четыре диапазона: длинные (λ = 104… 103 м), средние (λ = 103…102 м), короткие (λ =102,.. 10 м) и ультракороткие (λ < 10 м).
В науке и радиотехнике радиоволны делятся на четыре диапазона: длинные (104…103 м), средние (103-102 м), короткие (102…10 м) и ультракороткие (< 10 м).
Волны каждой части диапазона имеют свои особенности. Так, длинные и средние волны преломляются и дифрагируют в атмосфере, вследствие чего они огибают поверхность земного шара (рис. 3.20). Но для этого радиопередатчики должны иметь очень большую мощность, а передающие антенны большие размеры. Да и количество станций, работающих в этом диапазоне без взаимных помех, не может быть очень большим. Поэтому для дальней связи длинные волны практически не применяются.
Рис. 3.20. Длинные и средние волны огибают земную поверхность
Для дальней связи чаще всего применяются короткие волны, они хотя и не огибают земной шар, но отражаются от. ионизированного слоя атмосферы (ионосферы), как от зеркала. После многократного отражения от этого слоя и от поверхности Земли короткие волны могут распространяться по всему земному шару (рис. 3.21). Но высота и плотность ионизированного слоя на протяжении года ощутимо изменяются, поэтому связь на коротких волнах неустойчива и в последнее время применяется редко.
Ультракороткие волны в земных условиях распространяются в пределах «прямой видимости», практически не преломляясь. Высокая частота этих радиоволн позволяет применять частотную модуляцию, которая обеспечивает высокое качество связи. Кроме того, в этом диапазоне можно использовать много радиопередатчиков, поскольку их частотный диапазон довольно плотный.
Ультракороткие волны оказались весьма удобными для связи с космическими аппаратами (рис. 3.22), поскольку они свободно проходят сквозь ионосферу.
В земных условиях для обеспечения дальней связи с использованием ультракоротких волн применяют специальные ретрансляционные станции (рис. 3.23). Находясь на расстоянии прямой видимости, они принимают сигналы от одной станции и передают их другой. По этому принципу работает, в частности, система мобильной связи.
Ультракороткие волны используются и в системах космической связи, работающей с использованием ретрансляторов па специальных космических аппаратах.
Итоги:
1. Колебания — это наиболее распространенная форма движения в природе. Главным условием их возникновения является возникновение внешнего фактора, благодаря которому движение повторяется.
Колебания бывают периодическими и непериодическими. В периодических колебаниях движение повторяется через одинаковые интервалы времени.
2. Колебания, возникающие в замкнутых системах, называются свободными. В реальных условиях свободные колебания затухают. В идеальных системах, в которых отсутствуют потери энергии, возникают незатухающие колебания. Их называют собственными.
3. Период колебаний математического маятника зависит от его длины и ускорения свободного падения:

Период колебаний пружинного маятника зависит от массы груза и жесткости пружины:

Период колебаний математического маятника не зависит от массы и амплитуды.
4. Свободные колебания происходят по закону синуса или косинуса. Такие колебания называются гармоническими. Например: х = Asin(ωt+α), где А — амплитуда колебаний, ω -циклическая частота, a – начальная фаза, t – время.
5. Если на колебательную систему действует периодическая вынуждающая сила, то в системе возникают вынужденные колебания. Частота вынужденных колебаний равна частоте нынужданнцей силы. Если частота вынуждающей силы равна собственной частоте колебательной системы, то возникает резонанс – резкое возрастание амплитуды вынужденных колебаний. Примером вынужденных колебаний является раскачивание качелей.
6. Распространение колебаний в упругой среде называют волновым процессом, или механической волной. Волна переносит энергию. Волны бывают продольными и поперечными.
Универсальной характеристикой волнового процесса любой природы является длина волны. Это расстояние между двумя соседними точками волны, которые колеблются в одной фазе.
За один период волна распространяется на расстояние, равное длине волны.

7. Свободные электромагнитные колебания возникают в колебательном контуре, состоящем из катушки индуктивности и конденсатора. Они затухают вследствие потерь энергии на нагревание проводников и излучение электромагнитных волн. При отсутствии этих потерь колебания в колебательном контуре будут происходить бесконечно долго. Эти колебания будут собственными колебаниями. Период собственных колебаний в колебательном контуре определяется по формуле Томсона: 
8. В электрической цепи может возникать переменный ток как вынужденные колебания. Простейшим способом получения переменного тока является вращение рамки в магнитном поле или изменение магнитной индукции (вращение электромагнита) возле определенным способом расположенных катушек.
9. Электромагнитная волна – это переменное электромагнитное поле, распространяющееся в пространстве со скоростью спета. Электромагнитная волна имеет энергию. Во всех процессах, которые происходят в электромагнитной волне, выполняется закон сохранения энергии.
10. Все известные электромагнитные волны по длине волны или по частоте условно распределены по отдельным диапазонам: низкочастотное излучение (длина волны свыше 103 м), радиоволны, которые также разделяются на поддиапазоны, с длиной волны от нескольких сантиметров (ультракороткие волны) до 104 м (длинные волны); инфракрасное излучение, длина волны которого лежит в пределах от 0,1 мм до 760 нм; видимый свет с длиной волны от 380 до 760 пм; ультрафиолетовое излучение, длина волны которого лежит в пределах от фиолетовой части видимого света до нескольких нанометров; рентгеновское излучение в диапазоне длин волн от 10-8 до 10-11 м; гамма-излучение, имеющее длину волны меньше 10-11 м.
Справочный материал по колебательному движению
Еще в древности люди, наблюдая за Солнцем и Луной, определили единицы времени: год, месяц, сутки и др. Были созданы солнечные часы, затем водяные, огневые, песочные. Однако настоящая революция в конструкции часов произошла после выяснения свойств колебательного движения.
Подвесим груз на нить, отклоним его от положения равновесия и отпустим. Груз начнет колебаться, то есть двигаться от одного крайнего положения к другому, повторяя это движение через некоторый интервал времени. Таким образом, колебательное движение имеет важную общую черту с равномерным движением по окружности: оба движения являются периодическими (рис. 13.1).
Изучаем маятники:
Груз, колеблющийся на нити или на пружине, — пример простейшего маятника.
Маятник — это твердое тело, которое совершает колебания вследствие притяжения к Земле или в результате действия пружины. Маятники используют во многих физических приборах. Особенно важным является использование маятников в часах: периодичность колебаний дает возможность осуществлять отсчет времени. Маятники, колеблющиеся благодаря действию пружины, называют пружинными маятниками (рис. 13.2). Колебания пружинного маятника зависят от свойств пружины и массы тела. Маятники, колеблющиеся благодаря притяжению к Земле, называют физическими маятниками (рис. 13.3). Их колебания достаточно сложны, поскольку зависят от массы, геометрических размеров, формы маятника и т. д. Чтобы размеры и форма тела не влияли на его колебания, нужно взять нить, длина которой достаточно велика по сравнению с размерами тела, — в таком случае тело можно считать материальной точкой. При этом нить должна быть легкой и довольно тонкой, а чтобы во время колебаний тело было на неизменном расстоянии от точки подвеса, — нерастяжимой. Небольшой металлический шарик диаметром 1–2 см, подвешенный на тонкой нерастяжимой нити длиной 1–2 м, вполне может служить маятником, на колебания которого не будут влиять размеры, масса тела и свойства нити (рис. 13.4)*. Такой маятник называют нитяным.
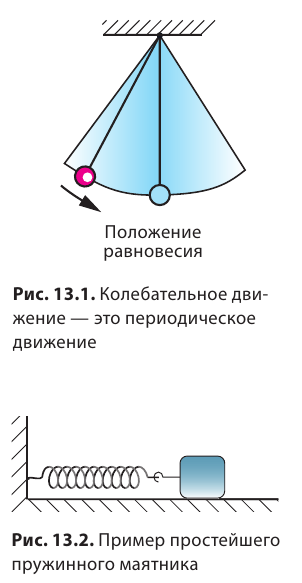
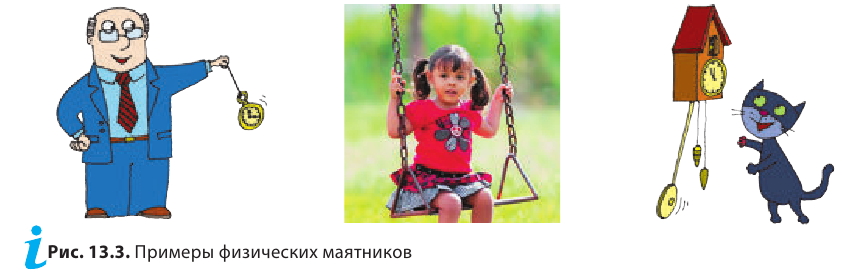
Что такое амплитуда колебаний
Наблюдая за колебаниями маятника, нетрудно заметить, что есть определенное максимальное расстояние, на которое колеблющееся тело удаляется от положения равновесия. Это расстояние называют амплитудой колебаний (рис. 13.5).
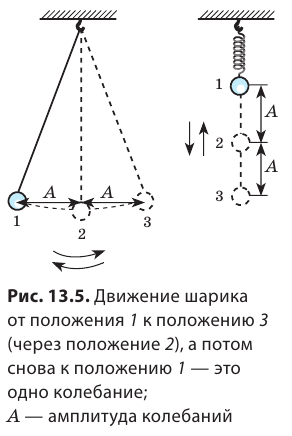
Амплитуда колебаний — это физическая величина, равная максимальному расстоянию, на которое отклоняется тело от положения равновесия во время колебаний. Амплитуду колебаний обозначают символом A. Единица амплитуды колебаний в СИ — метр: [A]= м. За одно колебание тело проходит путь  который примерно равен четырем амплитудам:
который примерно равен четырем амплитудам:  4 Определяем период и частоту колебаний
4 Определяем период и частоту колебаний
Колебательное движение является периодическим движением, поэтому оно характеризуется такими физическими величинами, как период колебаний и частота колебаний.
В данном случае длина нити считается также длиной маятника.
В случае с нитяным маятником данное равенство является приблизительным, так как тело движется по дуге окружности, длина которой больше расстояния, называемого амплитудой колебаний. Но если амплитуда колебаний мала (намного меньше длины маятника), этим различием обычно пренебрегают.
Период колебаний — это физическая величина, равная времени, за которое происходит одно колебание. Период колебаний, как и период равномерного движения по окружности, обозначают символом T и вычисляют по формуле:  , где t — время наблюдения; N — количество колебаний за это время. Единица периода колебаний в СИ — секунда: [T]= с.
, где t — время наблюдения; N — количество колебаний за это время. Единица периода колебаний в СИ — секунда: [T]= с.
Частота колебаний — это физическая величина, которая равна количеству колебаний за единицу времени. Частоту колебаний обозначают символом ν («ню») и вычисляют по формуле:  Единица частоты колебаний в СИ — герц ( Г ц ) ; названа так в честь Генриха Герца (рис. 13.6). Если тело за одну секунду осуществляет одно колебание, то частота его колебаний равна одному герцу:
Единица частоты колебаний в СИ — герц ( Г ц ) ; названа так в честь Генриха Герца (рис. 13.6). Если тело за одну секунду осуществляет одно колебание, то частота его колебаний равна одному герцу:  Частота ν и период T колебаний — взаимно обратные величины:
Частота ν и период T колебаний — взаимно обратные величины:  У маятников есть очень важное свойство: если амплитуда колебаний маятника намного меньше его длины, то частота и период колебаний маятника не зависят от амплитуды колебаний. Это свойство малых колебаний открыл Галилео Галилей*, и именно оно лежит в основе работы механических часов.
У маятников есть очень важное свойство: если амплитуда колебаний маятника намного меньше его длины, то частота и период колебаний маятника не зависят от амплитуды колебаний. Это свойство малых колебаний открыл Галилео Галилей*, и именно оно лежит в основе работы механических часов.
Различия затухающих от незатухающих колебаний
Выведем качели из состояния равновесия и отпустим. Качели начнут колебаться. Такие колебания называют свободными. Если на качели не влиять, то через некоторое время амплитуда их колебаний заметно уменьшится, а со временем колебания прекратятся вовсе. Колебания, амплитуда которых со временем уменьшается, называют затухающими колебаниями.
Свободные колебания всегда являются затухающими. Затухают с течением времени свободные колебания языка колокола, струны гитары, ветки дерева… Что следует сделать, чтобы амплитуда колебаний качелей со временем не уменьшалась, то есть чтобы их колебания были незатухающими? Незатухающие колебания — это колебания, амплитуда которых не изменяется со временем. Незатухающие колебания осуществляет, например, игла швейной машины, пока работает ее механизм (рис. 13.7).

Пример №6
Небольшой тяжелый шарик, подвешенный на нерастяжимой нити длиной 1 м, отклонили от положения равновесия и отпустили. За 30 с шарик совершил 15 колебаний. Какое расстояние пройдет шарик за 36 с, если амплитуда его колебаний — 5 см? Колебания считайте незатухающими. Анализ физической проблемы. Амплитуда колебаний намного меньше длины нити, поэтому можно считать, что за одно колебание шарик проходит путь, равный четырем амплитудам (4A). Если определить количество колебаний за 36 с, то можно найти расстояние, которое прошел шарик. Количество колебаний найдем, определив время одного колебания, то есть период колебаний.
Дано:
 ,
, ,
, ,
, .
.
Найти:

Решение:
Найдем период колебаний:
Найдем количество колебаний за 36 с:
Определим расстояние, которое проходит шарик за одно колебание: 
Определим путь, который пройдет шарик за 36 с: 
Анализ результатов. За одно колебание шарик проходит 20 см; время колебаний больше периода колебаний, поэтому пройденное шариком расстояние будет больше 20 см. Следовательно, результат правдоподобен.
Ответ: 
Итоги:
Колебательное движение (колебания) — периодическое движение. Различают затухающие и незатухающие колебания. Амплитуда А колебаний — это физическая величина, равная максимальному расстоянию, на которое тело отклоняется от положения равновесия во время колебаний. Период Т колебаний — это физическая величина, равная времени, за которое происходит одно колебание:  . Единица периода колебаний в СИ — секунда (с). Частота ν колебаний — это физическая величина, равная количеству колебаний за единицу времени:
. Единица периода колебаний в СИ — секунда (с). Частота ν колебаний — это физическая величина, равная количеству колебаний за единицу времени:  . Единица частоты колебаний в СИ — герц (Гц). Частота и период колебаний — взаимно обратные величины:
. Единица частоты колебаний в СИ — герц (Гц). Частота и период колебаний — взаимно обратные величины: 
«Механическое движение»:
Вы изучали механическое движение и его характеристики, узнали о видах механического движения: прямолинейное движение, движение по окружности, колебательное движение.
Вы ознакомились с некоторыми основными понятиями механики.

Вы научились различать виды механического движения.
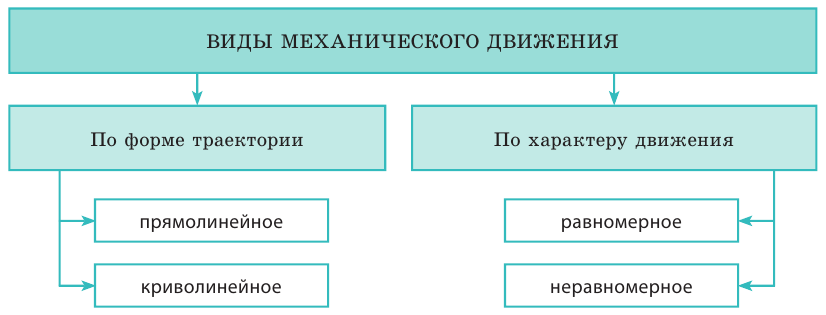
Вы научились исследовать равномерное движение с помощью графиков пути и графиков скорости движения.
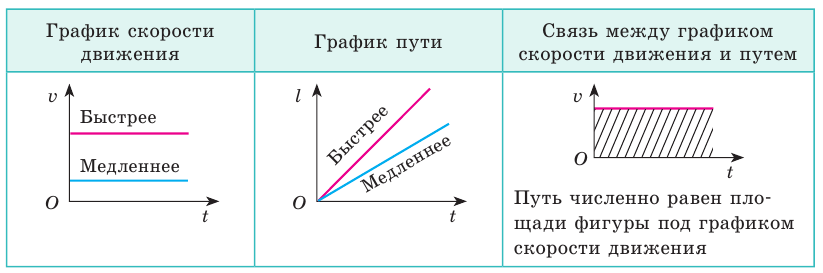
Вы исследовали некоторые механические движения.
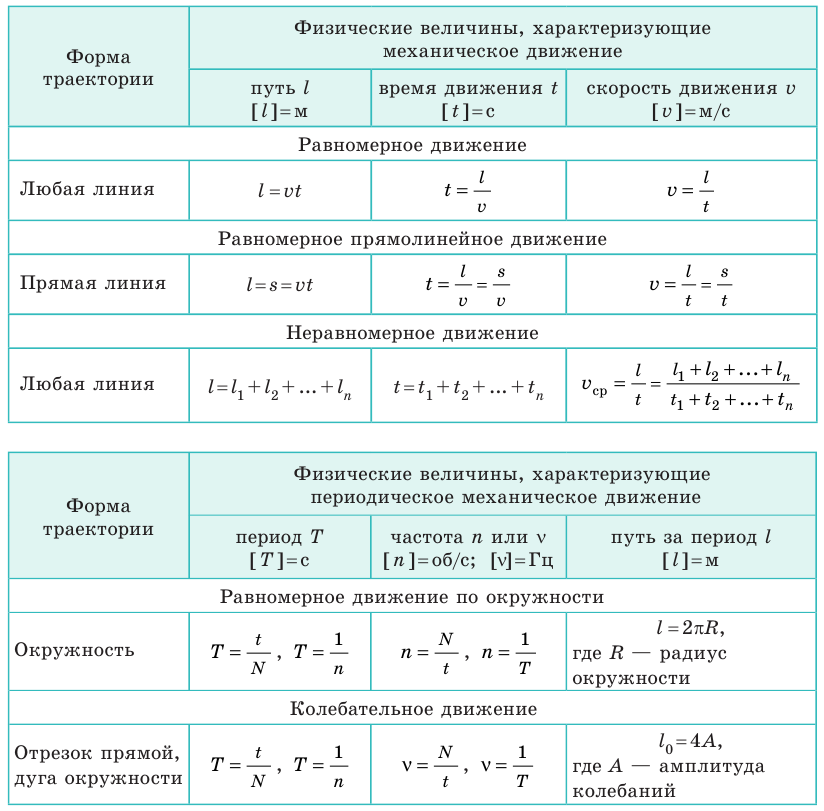
- Физический и математический маятники
- Пружинные и математические маятники
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
- Равномерное движение
- Неравномерное движение
- Вращательное движение тела
- Равномерное движение материальной точки по окружности
Как правило, не всегда легко определить период отдельных колебаний маятника, так как он постоянно находится в движении. Однако, поскольку все колебания маятника одинаковы, для определения периода колебаний можно провести расчеты нескольких колебаний.
Механические колебания.
Проблемы с датчиками ЕГЭ: гармоническая вибрация — амплитуда, период, частота, фаза вибрации — свободная вибрация, вынужденная вибрация, настройка.
Вибрация — это изменение состояния системы, повторяющееся с течением времени. Понятие вибрации охватывает очень широкий спектр явлений.
Вибрация или механические колебания механической системы — это механическое движение тела или системы тел, которое повторяется во времени и происходит вблизи положения равновесия. Равновесное положение — это состояние системы, в котором она может находиться столько времени, сколько необходимо, без внешних воздействий.
Например, когда маятник отклоняют и отпускают, он начинает колебаться. Положение равновесия — это положение маятника, когда он не отклоняется. Маятник может оставаться в этом положении в любое время, пока его не трогают. Когда маятник колеблется, он часто находится вне равновесия.
Сразу же после отпускания отклоненного маятника маятник начинает двигаться, проходит через положение равновесия, достигает противоположного крайнего положения, останавливается в нем, движется в обратном направлении и снова возвращается через положение равновесия. Произошла полная осцилляция. Кроме того, этот процесс периодически повторяется.
Амплитуда колебаний объекта — это величина максимального отклонения от положения равновесия.
Период колебаний — это продолжительность полного колебания. Можно сказать, что за определенный период тело проходит через четыре пути, идущих друг за другом.
Частота колебаний равна обратной величине периода:. Частота измеряется в герцах (Гц) и указывает на количество полных колебаний, происходящих за одну секунду.
Гармонические колебания.
Можно считать, что положение вибрирующего объекта определяется одной координатой. Положение равновесия обозначается через. Основная инженерная задача в этом случае — найти функцию, которая дает координаты тела в любой заданный момент времени.
Естественно использовать периодические функции для математического описания колебаний. Существует множество таких функций, две из которых наиболее важны: полутон и синус. Они обладают многими замечательными свойствами и тесно связаны с широким спектром природных явлений.
Функции синуса и косинуса могут быть получены друг из друга путем сдвига аргументов в противоположные стороны, поэтому вы можете ограничиться одной или другой. Определенно используйте косинус.
Гармонические колебания — это колебания, координаты которых зависят от времени по гармоническим законам.
Давайте рассмотрим важность величин, входящих в это уравнение.
Положительное значение — это максимальное значение модуля координат (поскольку максимальное значение модуля косинуса в единицах), т.е. максимальное отклонение от положения равновесия. Следовательно, это амплитуда колебаний.
Аргумент синусоидальной волны называется фазой колебания. Его значение, которое равно значению фазы тела, называется начальной фазой. Начальная фаза соответствует начальным координатам тела.
Это значение называется частотой его периода. Найдите зависимость между периодом и частотой колебаний. Каждое полное колебание соответствует увеличению фазы в радианах.
Периодическая частота измеряется в радианах в секунду (радиан/сек).
Согласно уравнениям (2) и (3), гармонический закон (1) имеет еще две формы.
График функции (1), представляющей зависимость времени, настроенного на гармонические колебания, показан на рисунке 1.
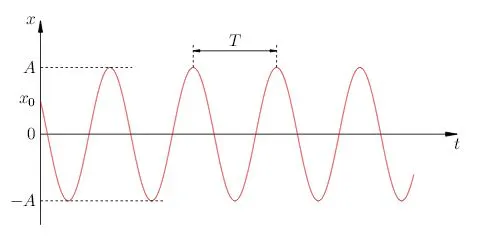 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) имеет более общий характер. Например, это соответствует ситуации, когда один маятник одновременно подвергается двум начальным воздействиям, обходится одним размером и получает начальную скорость. Есть два важных особых случая, когда одно из этих действий не было выполнено.
Мы пытаемся отклонить маятник, но начальная скорость не была задана (он отпускается без начальной скорости). В этом случае ясно, что мы можем поставить. Мы принимаем коварный закон:.
График гармонического колебания в этом случае показан на рисунке 2.
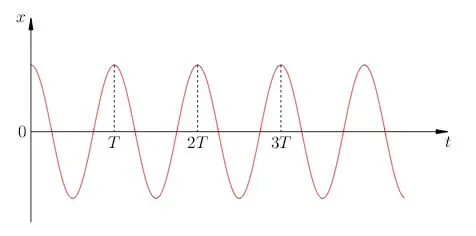 |
| Рис. 2. Закон косинуса |
Предположим, что маятник не отклоняется, а получает начальную скорость из положения равновесия от удара. В этом случае его можно носить. Возьмем закон знаков:.
График колебаний показан на рис. 3.
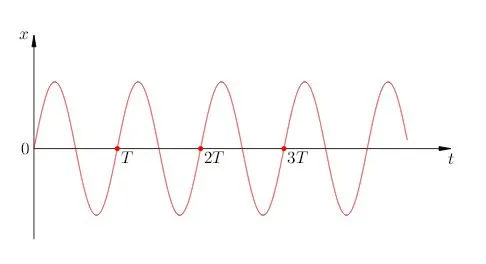 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернемся к общему закону гармонии (1). Давайте разграничим это равенство.
Далее, различают равенство исходов (4):.
Сравните уравнение (1) относительно координат и уравнение (5) относительно ускорения. Мы видим, что проекция ускорения отличается только от одной факторной координаты.
Эта зависимость называется уравнением гармонического колебания. Его также можно переписать в таком виде.
С точки зрения математики, уравнение (7) является дифференциальным уравнением. Решением дифференциального уравнения является функция (а не число, как в обычной алгебре). Таким образом, можно доказать, что:.
— Слагаемые уравнения (7) являются произвольными функциями произвольной формы (1).
— Другая функция не является решением уравнения.
Другими словами, соотношения (6) и (7) описывают гармонические колебания только с круговыми частотами. Эти две константы определяются начальными условиями, начальными значениями координат и скорости.
Звуковые волны — это упругие волны, которые вызывают ощущение звука у человека и представляют собой зоны сжатия и разбавления, передающиеся в течение длительного времени.
Период колебаний
Вибрации — это движения или процессы, которые повторяются в течение определенного периода времени.
Система, осуществляющая вибрацию, называется колебательной системой или осциллятором.
В зависимости от природы, процесс вибрации может быть механическим, электромагнитным и т.д.
Внимание. Если врач обнаружит, что у вас есть проблема, которая вас беспокоит, у вас может быть серьезная проблема (даже выкидыш). Если вы не можете написать свой собственный, вы можете заказать его здесь.
Свободные или естественные вибрации — это вибрации, наблюдаемые в системе, предоставленной самой себе после нарушения равновесия.
Вынужденные колебания — это колебания под воздействием внешних сил, которые регулярно меняются.
Механическая вибрация относится к категории принудительной вибрации.
Гармонизированные вибрации — это вибрации, определяемые естественными размерами, которые изменяются в соответствии со знаком или косметическим законом.
Различные периодические процессы, повторяющиеся через равные промежутки времени, могут быть записаны как суммы или суперфронты гармонических колебаний.
Определение периода колебаний, формула
Колебательные процессы могут быть выражены в виде уравнения. Гармонические колебания цены X могут быть выражены в следующем виде
(x(t))= a times cos left ( omega _t+ phi _ right))
где ⌘(x(t)⌘) — отклонение натуральной величины качелей от равновесного значения.
A представляет собой ширину гармонического колебания.
(ߡ омега _ справа) — круговая или кольцевая частота колебаний.
(Lo_CP_t) = (co_t + cp _)) — это начальная фаза характеристического колебания в момент времени t = 0, которая может быть определена путем выбора начальной точки.
(cp(t) = (co_t + cp _)) — это фаза колебания в момент времени t, определяемая радиусом и соответствующая значению количества колебаний в конкретный момент времени.
Для материальной точки массой m характеристика x соответствует смещению объекта из положения равновесия. Обратите внимание, что амплитуда и частота гармонических колебаний являются постоянными величинами. Исходя из того, что cos изменяет значение в диапазоне от +1 до -1, параметр x изменяется от +A до -A. С тех пор:.
cos слева (⌘ альфа +2 pi справа) = cos альфа, ⌘)
В этом случае x остается неизменным, а фаза колебаний увеличивается на $ 2 pi$.
Период колебаний T — это минимальное время возвращения колебательной системы в исходное состояние, которое определяется произвольно.
В этом случае фаза увеличивается на (2 pi:ߡ).
(섹 омега _(t + T) + фи _ = слева (섹 омега _t + фи _ справа) + 2 пи ).
Из этого уравнения можно рассчитать период колебаний.
Частота колебаний v является обратной величиной периода колебаний. Это количество полных колебаний, совершаемых в единицу времени.
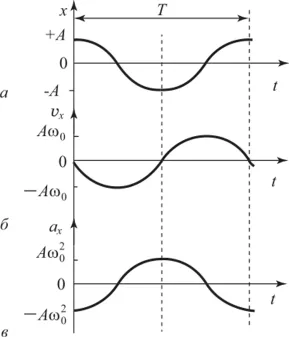
График показывает гармоническое колебание. где α — зависимость перемещения x от времени /, β — зависимость скорости vx от времени C и γ — зависимость ускорения ax от времени t.
Единицей частоты в СИ является герц (Гц). Это частота периодического цикла полных колебаний, происходящих за одну секунду.
Можно представить, что материальная точка совершает линейное гармоническое колебание вокруг оси x вокруг положения равновесия, которое является начальной точкой координат. Движение частиц носит колебательный характер и характеризуется скоростью и ускорением. Особенности этого процесса можно описать следующим образом.
Shift (x = A times cos left (⌘ omega _t + phi _ right) ⌘)
Скорость 섹 (v _ = точка = -A omega _ times sin left (섹 omega _ t + phi_ right) = A omega _ times cos left (섹 omega _ t + phi_ + frac<pi > направо) направо)
a _ = точка= ddot = -A omega _ times cos left (찒 omega _ t + phi_ right) = A omega _ ^ times cos left (찒 omega _ t + phi_ + pi right) )
Как найти период для физического маятника
При малых углах отклонения 섹 (⌘ varphi ) естественный маятник совершает гармонические колебания. Его вес можно рассматривать как добавление к центру тяжести в точке C. Сила, которая возвращает маятник в положение равновесия, — это сила F, которая является компонентом силы тяжести.
Отрицательные значения в правой части уравнения означают, что сила F направлена в сторону уменьшения угла ⌘ (⌘ альфа ).
Для меньших углов ⌘ (⌘ varphi ) уравнение можно записать в следующем виде
Примеры решений
Шарик на нити колеблется 60 раз за 2 минуты. Найдите период и частоту колебаний шарика.
ОТВЕТ: период колебаний маятника равен 2 с, а частота — 0,5 Гц.
По графику зависимости координат от представленного времени необходимо рассчитать характеристики колебательного движения тела.
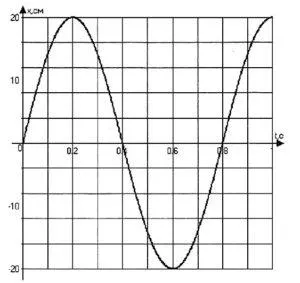
x(t) = A sin 2 pi Vt = 0,2 sin 2 pi раз 1,25t = 0,2 sin 2,5 pi t )
ОТВЕТ: амплитуда колебаний маятника равна 0,2 м, период колебаний 0,8 с, частота колебаний 1,25 Гц, а выражение для координат записано в следующем виде(x(t) = 0,2 sin 2,5 pi t )
Определите длину математического маятника, гармонично колеблющегося с частотой 0,5 Гц на поверхности Луны. В этом случае ускорение свободного падения составляет 1,6 м/с2.
Период колебаний математического маятника рассчитывается по следующему уравнению
Чтобы выразить длину маятника, обе части уравнения нужно возвести в квадрат.
Математический маятник — это точка массы, подвешенная на невесомой, нерастяжимой нити, прикрепленной к подвесу и помещенной в гравитационное поле.
Колебательный процесс
Одним из наиболее распространенных процессов в природе являются колебания. Процесс вибрации обычно заключается в изменении значений параметров рассматриваемой системы, которые регулярно перемещаются вперед и назад за определенное положение равновесия.

Рисунок 1. Вибрационные процессы в природе.
Колебания маятника
Простейшим примером колебательного процесса является маятник, который представляет собой легкую нить с грузом на конце. Его перемещают из положения равновесия в крайнее положение, а затем отпускают (отклонение должно быть намного меньше длины струны, чтобы уменьшить влияние трения).
Вес начинает двигаться в сторону противоположного крайнего значения. Здесь его скорость падает до нуля, и он колеблется в обратном направлении к исходному положению. (На самом деле маятник имеет потери на трение и немного отстает от начальной точки, но это небольшое отклонение пренебрежимо мало).
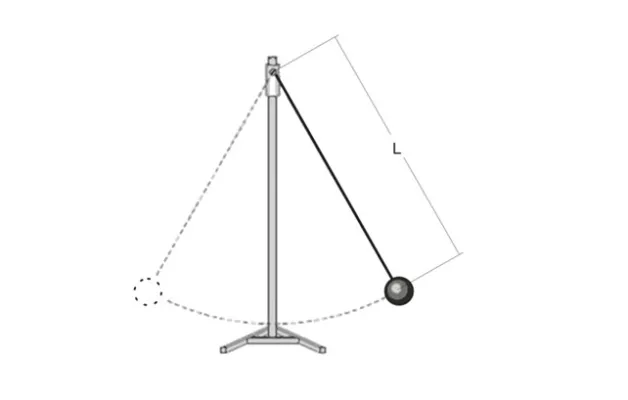
Рисунок 2. Колебания маятника.
Полное движение, начинающееся от начальной точки и продолжающееся до ближайшего возвращения к ней, называется колебанием.
Период колебаний
Сравнивая несколько последовательных колебаний, можно увидеть, что они очень похожи. При этом каждое колебание длится одинаковое время.
Время, необходимое для возникновения простого колебания, называется периодом колебания. Он обозначается заглавной латинской буквой $T$.
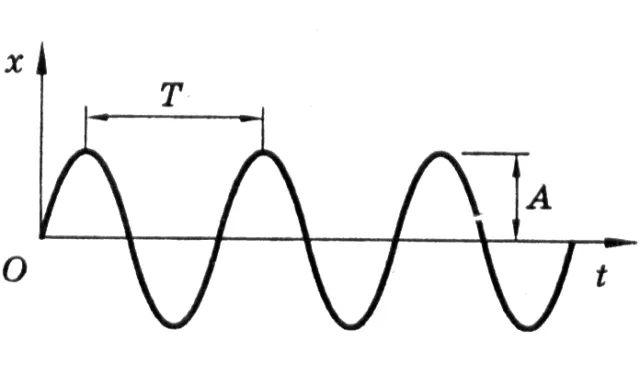
Рисунок 3: Период колебаний на графике.
Напомним, что в системе СИ время измеряется в секундах. Если период слишком мал, берутся дробные единицы миллисекунд (мс, $ 10 ^ $ секунд), микросекунд (мкс, $ 10 ^ $ секунд) и наносекунд (нс, $ 10 ^ $ секунд).
Как правило, не всегда легко определить период отдельных колебаний маятника, так как он постоянно находится в движении. Однако, поскольку все колебания маятника одинаковы, для определения периода колебаний можно провести расчеты нескольких колебаний.
Формула для периода колебаний выглядит следующим образом
Можно быстро различить периоды колебаний от 50 микросекунд (самый громкий) до десятилетий (например, 12 лет — один год для Юпитера). С помощью как экономики, так и технологии можно испытать периоды колебаний от $ 10 ($ нс (период рентгеновских лучей) до 250 миллионов лет (время вращения Солнечной системы вокруг центра нашей галактики).
Пружинный маятник — это груз, прикрепленный к пружине, который может колебаться как горизонтально, так и вертикально.
Частота колебаний — это количество полных колебаний в единицу времени. Символ обозначается в ᢙ (ᢙ ню ), а единица времени — с -1 или Гц (Герц).
1 Гц — это частота колебательного движения, при котором одно полное колебание происходит в секунду.
Период и частота колебаний взаимно обратны.
Частота периода — это число колебаний за 2π секунды. Название ᢙ (ᢙ омега ) и единица измерения — рад/с.
Свободные колебания (математический и пружинный маятники)
Свободные колебания — это колебания, совершаемые объектом под действием внутренних сил системы за счет первоначального запаса энергии после удаления от постоянного положения равновесия.
Условия, при которых возникает свободная вибрация:.
- при выведении тела из положения равновесия должна возникнуть сила, стремящаяся вернуть его в положение равновесия;
- силы трения в системе должны быть достаточно малы. При наличии сил трения свободные колебания будут затухающими.
В присутствии сил трения свободная вибрация обесценивается. Амортизация — это колебание, ширина которого уменьшается со временем.
Математический маятник — это материальная точка, парящая над голой ненатянутой струной.
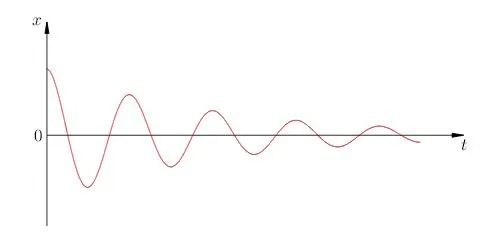
Период колебаний математического маятника:.
Частота колебаний математического маятника:.
Круговая частота колебаний математического маятника:.
Максимальная скорость колебаний математического маятника:.
Максимальное значение ускорения колебаний математического маятника:.
Период свободных колебаний математического маятника, движущегося вверх с ускорением или вниз с замедлением.
Период свободных колебаний математического маятника, движущегося вверх с ускорением или замедлением:.
Периоды свободных колебаний математического маятника, движущегося горизонтально с ускорением или замедлением:.
Мгновенное значение динамической энергии математического маятника, поднимающегося в процессе колебаний на высоту, ⌘(h ), определяется по формуле
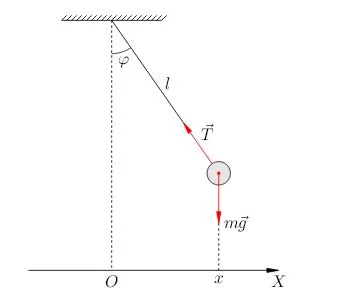
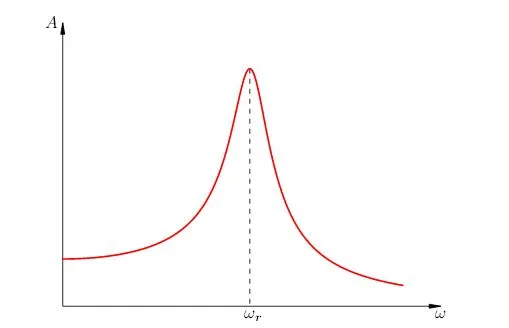
где Į(l ) — длина струны, а Į(Į альфа ) — угол отклонения от вертикали.
Пружина на удержании — это тело, подвешенное на пружине и колеблющееся вдоль вертикальной или горизонтальной оси под действием упругости пружины.
Длительность колебания пружины:.
Частотная вибрация пружины при удержании:.
Частота круговых колебаний пружины на удержании:.
Максимальная скорость колебаний пружины при удержании:.
Максимальное ускорение качающейся пружины при удержании:.
Мгновенная динамическая энергия пружины, находящейся в состоянии покоя, может быть найдена по типу.
Ширина динамической энергии — это максимальное значение динамической энергии, до синуса или косинуса.
Важно! Если маятник является пружиной, но нет математического маятника (естественного маятника), то круговая частота, период и частота колебаний не могут быть рассчитаны по типу, применяемому к математической и ожидающей пружине. В этом случае эти размеры рассчитываются в зависимости от типа силы или действия, приложенного к маятнику.
Резонанс
Регулировка — это явление внезапного увеличения ширины колебаний, которое происходит при совпадении частоты налагаемой силы и частоты колеблющегося тела.
(v_0 ) — собственная частота маятника.
На этой диаграмме показаны кривые координации для среднего значения различных ограничений. Чем ниже трение, тем выше и круче кривая координации.
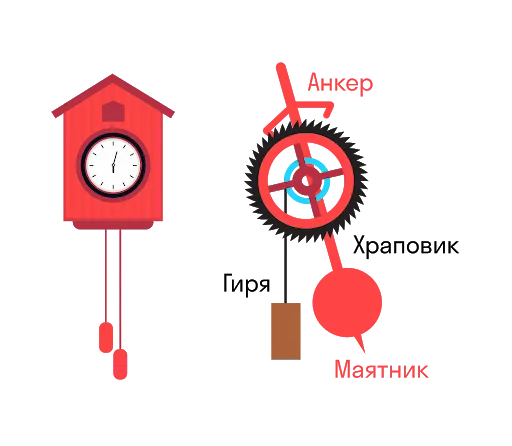
Явление координации учитывается при регулярном изменении нагрузок на машины и различные конструкции. Координата также используется в акустике, радиальной динамике и т.д.
Колебательное движение очень распространено. Заставить колебаться можно любое тело, если приложить к нему силу — однократно или постоянно. К примеру, если подтолкнуть качели, они начнут качаться вперед-назад, и такое движение будет приблизительно повторяться до тех пор, пока качели полностью не остановятся.
Другой пример колебательного движения — тело, подвешенное к пружине. Если его потянуть вниз и отпустить, то за счет сил упругости оно сначала поднимется вверх, а затем снова опустится вниз, затем движения вверх-вниз будут повторяться. Со временем они прекратятся под действием силы сопротивления воздуха.
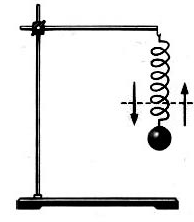
Колебаниями можно назвать даже движение гири, которую поднимается тяжелоатлет вверх, а затем опускает в низ. При этом он будет прикладывать к гире силу постоянно. Гиря будет колебаться до тех пор, пока к нему будет прикладываться эта сила.
Определения
Колебания — это движения, которые точно или приблизительно повторяются через определенные интервалы времени.
Механические колебания — это колебательные движения, совершаемые физическим телом в механической системе.
Механическая система — совокупность материальных точек (тел), движения которых взаимосвязаны между собой.
Какими бывают колебания?
Напомним, что в механической системе выделяют два вида сил:
- Внутренние силы — это силы, которые возникают между телами внутри системы. Примером внутренних сил служат силы тяготения между телами солнечной системы.
- Внешние силы — силы, которые действуют на тела системы со стороны тел, которые в эту систему не входят. Примером внешней силы может стать сила ветра, под действием которой шарик, подвешенный к опоре за нить, отклоняется в сторону порыва ветра.
Свободные колебания
Определения
Свободные колебания — колебания, происходящие в системе под действием внутренних сил после того, как эта система выведена из положения равновесия.
Колебательная система — механическая система, в которой возможно совершение свободных колебаний.
Свободные колебания в колебательной системе могут возникнуть только при наличии двух условий:
- После выведения из равновесия в колебательной системе появляются силы, направленные в сторону положения равновесия. Эти силы стремятся возвратить систему в положение равновесия.
- Трение между телами колебательной системы относительно мало. В противном случае колебания либо сразу затухнут, либо не начнутся совсем.
Примеры свободных колебаний:
- колебания шарика на дне сферической чаши;
- движение качелей после однократного толчка;
- колебания груза на пружине после ее растяжения;
- колебания струны после ее отклонения.

Примером колебательной системы также служит математический маятник — материальная точка, подвешенная на невесомой нерастяжимой нити. В действительности такого маятника не существует. Это идеализированная модель реального маятника, примером которого служит тяжелый шарик, подвешенный на длинной нити. В этом случае размером шарика и растяжением нити можно пренебречь.
В колебательную систему математического маятника входят:
- нить;
- тело, привязанное к нити;
- Земля, в поле тяжести которой находится привязанное к нити тело.
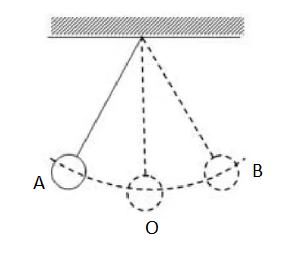
В положении равновесия (точка О) шарик висит на нити и покоится. Если его отклонить от положения равновесия до точки А и отпустить, под действием силы тяжести шарик приблизится к положению равновесия. Так как к этому моменту шарик обретет скорость, он не сможет остановиться и приблизится к точке В. Затем он снова вернется в точку А через положение равновесия в точке О. Шарик будет колебаться, пока не затухнут под действием возникающей силы сопротивления воздуха.
Вынужденные колебания
Определение
Вынужденные колебания — колебания тел под действием внешних периодически изменяющихся сил.
Примерами вынужденных колебаний служат:
- движение поршня в цилиндре;
- раскачивание ветки дерева на ветру;
- движение иглы швейной машинки;
- движение качелей под действием постоянных толчков.
Затухающие и незатухающие колебания
Определение
Затухающие колебания — колебания, которые со временем затухают. При этом максимальное отклонение тела от положения равновесия с течением времени уменьшается.
Колебания затухают под действием сил, препятствующих колебательному движению. Так, шарик в сферической чаше перестает колебаться под действием силы трения. Математический маятник и качели перестают совершать колебательные движения за счет силы сопротивления воздуха.
Важно!
Все свободные колебания являются затухающими, так как всегда присутствует трение или сопротивление среды.
Незатухающими колебаниями могут быть только те, которые совершаются под действием периодической внешней силы (вынужденные колебания). Так, ветка будет раскачиваться до тех пор, пока дует ветер. Когда он перестанет дуть, колебания ветки со временем затухнут. Иголка швейной машинки будет совершать колебательные движения до тех пор, пока швея вращает ручку привода. Когда она перестанет это делать, иголка сразу остановится.
Динамика колебательного движения
Для того чтобы описать количественно колебания тела пол действием силы упругости пружины или колебания шарика, подвешенного на нити, воспользуемся законами механики Ньютона.
Уравнение движения тела, колеблющегося под действием сил упругости
Рассмотрим колебательное движение шарика, вызванное силой упругости, возникшей при растяжении горизонтальной пружины вдоль оси Ох.
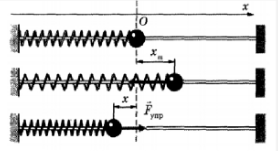
Согласно II закону Ньютона произведение массы тела на ускорение равно равнодействующей всех сил приложенных к телу. Поскольку сила трения пренебрежимо мала, мы можем считать, что в этой механической системе действует единственная сила — сила упругости. Учтем, что шарик колеблется вдоль одной прямой, и выберем одномерную систему координат Ох. Тогда:
m→a=→F
max=Fx упр
Согласно закону Гука, проекция сила упругости прямо пропорциональная смещению шарика из положения равновесия (точки О). Смещение равно координате x шарика, причем проекция силы и координаты имеют разные знаки. Это связано с тем, что сила упругости всегда направлена к точке равновесия, в то время как расстояние от этой точки во время движения увеличивается в обратную сторону. Отсюда делаем вывод, что сила упругости равна:
Fx упр=−kx
где k — жесткость пружины.
Тогда уравнение движения шарики принимает вид:
max=−kx
Или:
ax=−kmx
Так как масса шарики и жесткость пружины для данной колебательной системы постоянны, отношение km — постоянная величина. Отсюда делаем вывод, что проекция ax ускорения тела прямо пропорциональна его координате x, взятой с противоположным знаком.
Пример №1. Груз массой 0,1 кг прикрепили к пружине школьного динамометра жесткостью 40 Н/м. В начальный момент времени пружина не деформирована. После того, как груз отпускают, возникают колебания. Чему равна максимальная скорость груза?
Максимальной скорости груз достигнет при максимальном его отклонении от положения равновесия — в нижней точке траектории. Учтем, что тело движется вниз под действием силы тяжести. Но в то же время на него действует сила упругости, которая возникает в пружине и нарастает до тех пор, пока не становится равной по модулю силе тяжести. Применив III закон Ньютона получим:
∣∣∣→Fтяж∣∣∣=∣∣∣→Fупр∣∣∣
Тогда:
mg=kymax
где ymax — максимальное отклонение груза от положения равновесия. В этой точке скорость тела будет максимальная. Для нахождения этой величины используем формулу из кинематики:
ymax=v2max−v202g
Начальная скорость равна нулю. Отсюда:
ymax=v2max2g
Тогда:
mg=kv2max2g
Максимальная скорость равна:
vmax=g√2mk=10√2·0,140≈0,71 (мс)
Уравнение движения математического маятника
Ниже на рисунке представлен математический маятник. Если мы выведем из положения равновесия шарик и отпустим, возникнет две силы:
- сила тяжести, направленная вниз;
- сила упругости, направленная вдоль нити.
При колебаниях шарика также будет возникать сила сопротивления воздуха. Но так как она очень мала, мы будем ею пренебрегать.
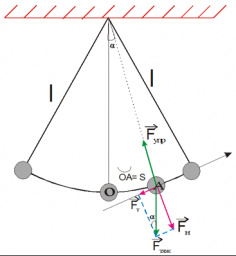
Чтобы описать динамику движения математического маятника, удобно силу тяжести разложить на две составляющие:
→Fт=→Fτ+→Fn
Причем компонента →Fτ направлена перпендикулярно нити, а →Fn — вдоль нее.
Компонента →Fτ представляет собой проекцию силы тяжести в момент, когда нить маятника отклонена от положения равновесия (точки О) на угол α. Следовательно, она равна:
→Fτ=−→Fтsinα=−mgsinα
Знак «–» мы здесь поставили по той причине, что компоненты силы тяжести →Fτ и α имеют противоположные знаки. Ведь если отклонить шарик на угол α>0, то составляющая →Fτ будет направлена в противоположную сторону, так как она будет пытаться вернуть шарик в положение равновесия. И ее проекция будет отрицательной. Если же шарик отклонить на угол α<0, то составляющая →Fτ будет направлена в обратную сторону. В этом случае ее проекция будет положительной.
Обозначим проекцию ускорения маятника на касательную к его траектории через aτ. Эта проекция характеризует быстроту изменения модуля скорости маятника. Согласно II закону Ньютона:
maτ=Fτ
Или
maτ=−mgsinα
Разделим обе части выражения на массу шарика m и получим:
aτ=−gsinα
При малом отклонении нити маятника от вертикали можно считать, что sinα≈α (при условии, что угол измерен в радианах). Тогда:
aτ=−gα
Внимание! Чтобы перевести градусы в радианы, нужно умножить градусы на число π и поделить результат на 180. К примеру 2о = 2∙3,14/180 рад., или 2о = 0,035 рад.
При малом отклонении также дугу ОА мы можем принять за длину отрезка OA, который мы примем за s. Тогда угол α будет равен отношению противолежащего катета (отрезка s) к гипотенузе (длине нити l):
α=sl
Отсюда:
aτ=−gls
Так как ускорение свободного падения и длина нити для данной колебательной системы постоянны, то отношение gl — тоже постоянная величина.
Это уравнение похоже на то уравнение, которое мы получили для описания колебательного движения шарика под действием силы упругости. И оно также позволяет сделать вывод, что ускорение прямо пропорционально координате.
Пример №2. Определить длину нити, если шарик, подвешенный к ней, отклонится на 1 см. При этом нить образовала с вертикалью угол, равный 1,5о.
При отклонениях на малый угол мы можем пользоваться следующей формулой:
α=sl
Чтобы найти длину нити, нужно выразить угол α в радианах:
1,5°=3,14·1,5180≈0,026 (рад)
1 см = 0,01 м
Тогда длина нити равна:
l=sα=0,010,026≈0,385 (м)=38,5 (см)
Основные характеристики колебательного движения
Определения
Амплитуда — максимальное отклонение тела от положения равновесия. Обозначается буквой A, иногда — xmax. Единиц измерения — метр (м).
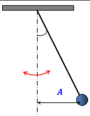
Период — время совершения одного полного колебания. Обозначается буквой T. Единица измерения — секунда (с).
Частота — количество колебаний, совершенных в единицу времени. Обозначается как ν («ню»). Единица измерения — 1/секунда, или секунда–1, или герц (1/с, или с–1, или Гц).
Период и частота колебаний связаны между собой следующей формулой:
ν=1T
Период колебаний также можно вычислить, зная количество совершенных колебаний N за время t:
T=tN
Поскольку частота — это величина, обратная периоду колебаний, ее можно выразить в виде:
ν=Nt
Пример №3. Определить частоту колебаний груза, если суммарный путь, который он прошел за 2 секунды под действием силы упругости, составил 1 м. Амплитуда колебаний равна 10 см.
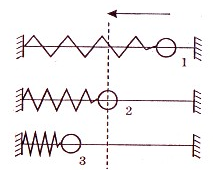
Во время одного колебания груз проходит расстояние, равное 4 амплитудам. Посмотрите на рисунок. Положение равновесия соответствует состояние 2. Чтобы совершить одно полное колебание, сначала груз отводят в положение 1. Когда его отпускают, он проходит путь 1–2 и достигает положения равновесия. Этот путь равен амплитуде колебаний. Затем он продолжает движение до состояния 3. И в это время он проходит расстояние 2–3, равное еще одной амплитуде колебаний. Чтобы вернуться в исходное положение (состояние 1), нужно снова проделать путь в обратном направлении: сначала 3–2, затем 2–1.
Следовательно, количество колебаний равно отношению пройденного пути к амплитуде, помноженной на 4:
N=s4A
10 см = 0,1 м
Так как мы знаем, что эти колебания совершались в течение 2 секунд, для вычисления частоты мы можем использовать формулу:
ν=Nt=s4At=14·0,1·2=1,25 (Гц)
Задание EF17593
В таблице представлены данные о положении шарика, колеблющегося вдоль оси Ох, в различные моменты времени.

Каков период колебаний шарика?
Ответ:
а) 1 с
б) 2 с
в) 3,2 с
г) 4 с
Алгоритм решения
1.Определить амплитуду колебаний.
2.Определить время между двумя максимальными отклонениями от положения равновесия шарика.
3.Найти полный период колебаний.
Решение
Из таблицы видно, что амплитуда колебаний равна 15 мм. Следовательно, максимальное отклонение в противоположную сторону составляет –15 мм. Расстояние между двумя максимальными отклонениями от положения равновесия шарика равно половине периода колебаний. Этим значения в таблице соответствует время 1 и 3 секунды соответственно. Следовательно, разница между ними — половина периода. Тогда период будет равен удвоенной разнице во времени:
T=2(t2−t1)=2(3−1)=4 (с)
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17539
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличивается |
| 2) | уменьшается |
| 3) | не изменяется |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.

Алгоритм решения
1.Вспомнить, от чего зависит потенциальная энергия пружины, и установить, как она меняется, когда она поднимает груз в поле тяжести земли к положению равновесия.
2.Вспомнить, от чего зависит кинетическая энергия тел, и установить, как она меняется в рассматриваемый промежуток времени.
3.Вспомнить, от чего зависит потенциальная энергия тел, и установить, как она меняется относительно земли.
Решение
Потенциальная энергия пружины определяется формулой:
Wp=kx22
где k — коэффициент жесткости пружины, а x — ее удлинение. Величина x была максимальной в нижней точке траектории. Когда пружина начинает сжиматься, она уменьшается. Так как потенциальная энергия зависит от квадрата x прямо пропорционально, то при уменьшении этой величины потенциальная энергия пружины тоже уменьшается.
Кинетическая энергия тела определяется формулой:
Wk=mv22
В нижней точке траектории скорость шарика была равна нулю. Но к этому времени потенциальная энергия пружины достигла максимума. Она начинает с ускорением поднимать шарик вверх, сжимаясь. Следовательно, скорость растет. Так как кинетическая энергия зависит от квадрата скорости тела прямо пропорционально, то при увеличении скорости этой величины кинетическая энергия шарика тоже увеличивается.
Потенциальная энергия тел в поле тяжести земли определяется формулой:
Wp=mgh
Масса и ускорение свободного падения шарика — постоянные величины. Следовательно, потенциальная энергия зависит только от расстояния до поверхности земли. Когда пружина поднимает шарик, расстояние между ним и землей увеличивается. Так как потенциальная энергия зависит от расстояния прямо пропорционально, то при его увеличении потенциальная энергия шарика тоже растет.
Ответ: 211
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18835
В таблице представлены данные о положении шарика, прикреплённого к пружине и колеблющегося вдоль горизонтальной оси Ох, в различные моменты времени.

Из приведённого ниже списка выберите два правильных утверждения и укажите их номера.
Ответ:
А) Потенциальная энергия пружины в момент времени 1,0 с максимальна.
Б) Период колебаний шарика равен 4,0 с.
В) Кинетическая энергия шарика в момент времени 2,0 с минимальна.
Г) Амплитуда колебаний шарика равна 30 мм.
Д) Полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна.
Алгоритм решения
- Проверить истинность каждого утверждения.
- Выбрать 2 верных утверждения.
Решение
Согласно утверждению «А», потенциальная энергия пружины в момент времени 1,0 с максимальна. Потенциальная энергия пружины максимальна, когда она отклоняется от положения равновесия на максимальную возможную величину. Из таблицы видно, что в данный момент времени ее отклонение составило 15 мм, что соответствует амплитуде колебаний (наибольшему отклонению от положения равновесия). Следовательно, утверждение «А» — верно.
Согласно утверждению «Б», период колебаний шарика равен 4,0 с. Один период колебаний включает в себя 4 фазы. В течение каждой фазы шарик на пружине проделывает путь, равный амплитуде. Следовательно, мы можем найти период колебаний, умножив время одной фазы на 4. В момент времени t = 0 с, шарик находился в положении равновесия. Первый раз он отклонился на максимальную величину (15 мм) в момент времени t = 1,0 с. Значит, период колебаний равен 1∙4 = 4 с. Следовательно, утверждение «Б» — верно.
Согласно утверждению «В», кинетическая энергия шарика в момент времени 2,0 с минимальна. В этот момент времени, согласно данным таблицы, шарик проходит положение равновесия. В этом положении скорость шарика всегда максимальна. Поэтому кинетическая энергия, которая зависит от квадрата скорости прямо пропорционально, минимальной быть не может. Следовательно, утверждение «В» — неверно.
Согласно утверждению «Г», амплитуда колебаний шарика равна 30 мм. Амплитуда колебаний — есть расстояние от положения равновесия до точки максимального отклонения шарика. В данном случае оно равно 15 мм. Следовательно, утверждение «Г» — неверно.
Согласно утверждению «Д», полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна. Полная механическая энергия колебательной системы — это совокупность кинетической и потенциальной энергий. И при отсутствии сил трения она остается величиной постоянной. Она лишь превращается из одного вида энергии в другую. Следовательно, утверждение «Д» — неверно.
Ответ: АБ
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 8.9k
