Стандартный
маршрут прибытия по приборам (STAR)позволяет осуществить переход от этапа
полета по маршруту к этапу захода на
посадку.
Маршруты прибытия
в пределах от этапа полета по маршруту
до контрольной точки или средства,
используемых в данной схеме, публикуются
в случае необходимости или эксплуатационной
целесообразности.
Ширина зоны защиты
уменьшается от значения “на маршруте”
до значения “на начальном этапе захода
на посадку”, при этом максимальный
угол сужения с обеих сторон оси составляет
30°.
Это сужение
начинается на расстоянии 46 км (25 м. миль)
от начальной контрольной точки захода
на посадку (IAF), если длина маршрута
прибытия составляет 46 км (25 м. миль) или
более. Если длина маршрута прибытия
составляет менее 46 км (25 м. миль), оно
начинается в точке начала маршрута
прибытия.
Маршрут прибытия
обычно заканчивается в IAF. Прибытие с
любого направления или по секторам
может обеспечиваться с учетом минимальных
абсолютных высот в секторе (MSA).
Минимальные
абсолютные высотыв секторе или
абсолютные высоты прибытия устанавливаются
для каждого аэродрома иобеспечивают
запас высоты над препятствиями, по
меньшей мере равный 300 м (1000 фут) в пределах
46 км (25 м. миль) от навигационного
средства, начальной контрольной точки
захода на посадку или промежуточной
контрольной точки, связанных со схемой
захода на посадку данного аэродрома.
При использовании
радиолокатора района аэродромавоздушное судно выводится к контрольной
точке или на линию пути промежуточного
или конечного этапов захода на посадку
в точке, от которой заход на посадку
может быть продолжен пилотом по карте
захода на посадку по приборам.
6.3.7 Начальный участок захода на посадку
Начальный
участок захода на посадку по приборамначинается в начальной контрольной
точке захода на посадку(IAF)и
заканчивается в промежуточной контрольной
точке(IF).На начальном этапе захода
на посадку воздушное судно уже находится
вне пределов маршрутной структуры и
осуществляет маневр для выхода на
промежуточный участок захода на посадку.
Скорость
и конфигурация ВС зависят от расстояния
до аэродрома и потребного снижения.
Обычно на начальном
участке захода на посадку до IF
обеспечивается наведение по линии пути
при максимальном угле пересечения с
линией пути промежуточного этапа захода
на посадку, составляющем:
а) 90° для точного
захода на посадку;
б) 120° для неточного
захода на посадку.
Минимальный
запас высоты над препятствиями
В основной зоне
начального участка захода на посадку
обеспечивает запас высоты над
препятствиями, составляющий по крайней
мере 300 м (1000 фут), который линейно
уменьшается до нуля у внешнего края
дополнительной зоны.
6.3.8 Виды маневров
Для построения
схемы захода на посадку по приборам
там, где отсутствует соответствующая
IAF или IF, необходимо применение обратной
схемы, схемы “ипподром” или типовой
схемы ожидания в виде, показанном на
рис. 3.2.
Обратная схема
Обратная схема
может быть применена в виде стандартного
разворота или разворота на посадочную
прямую.Вход в схему ограничивается
особым направлением или сектором. В
этих случаях предписывается специальная
схема – как правило, разворот на
посадочную прямую или стандартный
разворот.
Для того чтобы
оставаться в пределах обеспечиваемого
воздушного пространства, требуется
строго выдерживать указанные направления
и отсчет времени. Следует иметь в виду,
что если это не оговорено, обеспечиваемое
для этих схем воздушное пространство
не позволяет выполнить такой маневр
как полет по схеме “ипподром” или
полет в зоне ожидания.
Существуют три
общепризнанных маневра,которые
относятся к обратной схемеи каждый
из которых обладает своими собственными
характеристиками в отношении использования
воздушного пространства:
а)
Cтандартный разворот на
45/180° (см. рис. 3.2 А), который
начинается в местоположении средства
или в контрольной точке и состоит из:
1)
прямолинейного отрезка с наведением
по линии пути. Этот прямолинейный отрезок
может определяться по времени или может
ограничиваться радиалом или расстоянием
по DME;
2)
разворота на 45º;
3)
прямолинейного отрезка без наведения
по линии пути. Этот прямолинейный отрезок
определяется временем полета. Оно
составляет:
–
1 мин от начала разворота для воздушных
судов категорий А и В;
–
1 мин 15 с от начала разворота для воздушных
судов категорий С, D и Е.
4)
разворота на 180° в противоположном
направлении для выхода на линию пути
приближения.
б)
Стандартный разворот на 80/260°
(см. рис. 3.2 В), который начинается в
местоположении навигационного средства
или в контрольной точке и состоит из:
1)
прямолинейного отрезка с наведением
по линии пути. Этот прямолинейный отрезок
может ограничиваться временем полета,
радиалом или расстоянием по DME;
2)
разворота на 80°;
3)
разворота на 260° в противоположном
направлении для выхода на линию пути
приближения.
Примечание.
Продолжительность полета на начальном
отрезке удаления схемы может изменяться
в соответствии с категориями скоростей
воздушных судов для уменьшения общей
длины защищенной зоны. В этом случае
публикуются отдельные схемы.
в)
Разворот на посадочную прямую,
состоящий из:
1)
указанных линии пути удаления и отсчета
времени или расстояния по DME от средства;
2)
последующего разворота для выхода на
линию пути приближения (см. рис. 3.2С).
Линия пути
удаления и/или отсчет времени полета
могут отличаться для различных категорий
ВС.. В этом случае публикуются отдельные
схемы.

Рисунок
3.2- Типы обратных схем
и схем типа «ипподром»
Схема “ипподром”
Схема “ипподром”
состоит из:
а)
разворота над средством или в контрольной
точке от линии пути приближения на 180°
на линию пути удаления с длительностью
полета по ней 1, 2 или 3 мин;
b)
последующего разворота на 180° в том же
направлении для возвращения на линию
пути приближения (см. рис. 3.2 D).
Линия пути
удаления может ограничиваться вместо
отсчета времени расстоянием по DME или
пересекающим радиалом/пеленгом.
Вход в схему
“ипподром”
Обычно схема
“ипподром” применяется в тех
случаях, когда прибывающие воздушные
суда пролетают над контрольной точкой
с различных направлений. В этих случаях
предполагается, что ВС будут входить в
схему точно так же, как это предписывается
в отношении входа в схему ожидания, с
учетом следующего:
а) при смещенном
входе из сектора 2 ограничивается время
полета по смещенной на 30° линии пути до
1 мин 30 с, после чего предполагается, что
пилот выполнит разворот на курс,
параллельный линии пути удаления для
полета в пределах оставшегося времени
удаления. Если время полета в сторону
удаления составляет лишь 1 мин, время
полета по смещенной на 30° линии пути
также составляет 1 мин;
б) параллельный
вход не выполняется с возвращением в
направлении средства без предварительного
пересечения линии пути приближения
выхода на конечный участок схемы захода
на посадку;
в) все маневры,
насколько это возможно, выполняются на
стороне маневрирования относительно
линии пути приближения.
Примечание.
Схемы “ипподром” применяются там,
где прямолинейный участок не имеет
достаточной протяженности для необходимой
потери абсолютной высоты, и в тех случаях,
когда вход в обратную схему нецелесообразен.
Для повышения оперативной гибкости их
также могут устанавливать в качестве
альтернативы
обратным схемам (в этом случае они не
обязательно публикуются отдельно).
Правила
полетов для схем «Ипподром» и обратных
схем
Вход. Если
в схеме не содержатся особые ограничения
в отношении входа, вход в обратные схемы
осуществляется по линии пути, расположенной
в пределах ±30° относительно линии пути
удаления обратной схемы. Однако для
разворотов на посадочную прямую, когда
сектор прямого входа ±30° не включает
линию пути, обратную линии пути
приближения, сектор входа расширяется,
чтобы включить эту линию. См. рис. 3.3, 3.4
и 3.5.

Рисунок
3.3- Прямой вход в стандартный разворот

Рисунок
3.4- Прямой вход в разворот на посадочную
прямую

Рисунок
3.5- Пример прибытия с любого направления
с использованием схемы ожидания в
обратной схеме
Ограничения
по скорости
Они могут
указываться дополнительно к ограничениям,
связанным с категорией воздушных судов,
или вместо них. Чтобы воздушное судно
оставалось в пределах защищенных зон,
необходимо исключить превышение этих
скоростей.
Угол крена.
Схемы основываются на среднем
достигаемом угле крена 25°
или на угле
крена,
обеспечивающем угловую скорость
разворота 3°/с, в зависимости от
того, что меньше.
Снижение. ВС
пересекает контрольную точку или
средство и удаляется по указанной линии
пути, при необходимости снижаясь, но не
ниже минимальной абсолютной/относительной
высоты пролета этого участка. Если после
разворота в сторону приближения
предусматривается дальнейшее снижение,
это снижение не начинается до стабилизации
воздушного судна на линии пути приближения.
ВС считается стабилизированным, если
оно находится:
а)
в пределах половины полной шкалы
отклонений для ILS и VOR;
б)
в пределах ±5° от требуемого пеленга
для NDB.
Отсчет времени
в схеме “ипподром”
Если схема
основана на средстве, отсчет времени
удаления начинается:
а)
от траверза средства или;
б)
от момента выхода на курс удаления, в
зависимости от того, что наступает
позднее.
Если схема
основана на контрольной точке, время
полета по линии пути удаления отсчитывается
от момента выхода на курс удаления.
Разворот на линию
пути приближения должен начинаться:
а)
в пределах указанного времени (с поправкой
на ветер);
б)
при выходе на какое либо расстояние по
DME;
в)
по достижении радиала/пеленга,
определяющего ограничительное расстояние,
в зависимости от того, что наступает
раньше.
Влияние ветра
Как по курсу, так
и по времени следует делать соответствующие
поправки для компенсации влияния ветра
в целях как можно более точного и быстрого
возврата на линию пути приближения для
осуществления установившегося захода
на посадку. При внесении таких поправок
необходимо в полной мере использовать
имеющиеся показания средств и данные
об известном ветре или его оценку. Это
особенно важно для ВС с небольшой
посадочной скоростью в условиях сильного
ветра, когда недостатки компенсационных
мер коррекции могут сделать схему
невыполнимой (т. е. ВС может пройти
контрольную точку до выхода на линию
пути приближения и оказаться за пределами
защищенной зоны).
Скорости
снижения. Заданные величины
времени и абсолютные высоты схемы
основаны на скоростях снижения, которые
не превышают значения в таблице 3.4.
Челночный
полет. Челночный полет обычно
предписывается там, где необходимое
снижение между концом начального этапа
захода на посадку и началом конечного
этапа захода на посадку превышает
значения, приведенные в таблице 3.4.
Примечание.
Челночные полеты выполняются в виде
снижения или набора высоты по типовой
схеме ожидания.
Таблица
3.4- Максимальная/минимальная
скорость снижение, которая указывается
на обратной схеме или в схеме типа
“ипподром”
|
Линия пути |
Максимальная* |
Минимальная* |
|
Категория |
245 |
Не |
|
Категория |
365 |
Не |
|
Линия пути |
Максимальная* |
Минимальная* |
|
Категория |
200 |
120 |
|
Категория |
305 |
180 |
*
Максимальное/минимальное снижение за
номинальное удаление 1мин (м (фут))
Участок счисления
пути (DR)
В тех случаях,
когда может быть получено эксплуатационное
преимущество, схема захода на посадку
по ILS может включать участок счисления
пути (DR) в пределах от контрольной точки
до линии курса курсового
радиомаяка
(см. рис. 3.6).
Линия пути DR
пересекается с линией курса курсового
радиомаяка под углом 45°, и ее длина
составляет не более 19 км (10 м. миль). Точка
пересечения является началом промежуточного
участка и обеспечивает соответствующий
вход в глиссаду.
Та

Рисунок 3.6- Участок
счисления пути (DR)
Соседние файлы в папке приборы + электрообор
- #
- #
- #
- #
- #
- #
12.01.20186.26 Mб378Силовые установки ВС. Учебное пособие.pdf
Аэропорт для новичка. Инструкция для тех, кто летит на самолете первый раз
Наконец вы дождались отпуска и летите отдыхать. Только вот лететь на самолёте вы будете в первый раз… И тут у вас возникает миллион вопросов: что делать в аэропорту? Куда идти? Как не опоздать на рейс?
Мы решили сделать небольшой FAQ по терминам и процедурам, который поможет новичкам чувствовать себя немного увереннее в аэропорту.
Порядок может немного меняться, так как в каждом аэропорте своя последовательность прохождения досмотров и регистрации.
Попав в аэропорт, первым делом вы должны пройти регистрацию на рейс (англ. check-in). Над стойкой регистрации, висит табло с логотипом авиакомпании, номером рейса и городом прибытия.

Данная информация продублирована на информационном табло, там же указан номер стойки, где проходит регистрация на ваш рейс.
Регистрация начинается за 2 часа до вылета и заканчивается за 30-40 минут до вылета.
При регистрации вы должны предъявить паспорт и авиабилет. Если у вас электронный билет, то предъявляете только паспорт. Багаж вы должны положить на транспортную ленту, где его взвесят, повесят специальную бирку (чтобы грузчики знали в какой самолет его положить, а вы смогли его потом найти) и отправят грузчикам. Также вас попросят предъявить ручную кладь (вещи, которые вы хотите взять с собой в салон самолета), на нее тоже могут повесить бирку.
Как правило, вес ручной клади не должен превышать 7-10 кг. Кроме этого, есть определенные требования к габаритам сумки, их вы можете уточнить у авиакомпании.
После регистрации вам выдадут посадочный талон (анг. boarding pass) и багажные бирки (наклейки, которые клеят на паспорт или посадочный талон, они помогут вам найти ваш чемодан по прилету).

Зарегистрироваться можно не только в аэропорту, но и дома. Некоторые авиакомпании практикуют онлайн регистрацию на рейс. Зарегистрироваться таким образом можно с помощью ноутбука, планшета и даже телефона. Подробнее о мобильной регистрации, можно почитать в посте “Мобильная регистрация”. После чего на обычном принтере, вы распечатываете посадочный талон, а багаж сдаете на специальной стойке Drop off.
На посадочном талоне будет написано в каком гейте будет посадка на самолет и ваше место в салоне. При регистрации, вы можете попросить представителя авиакомпании посадить вас на удобное место, например у окна или возле аварийного выхода.
Гейт (анг. gate – ворота) – выход на посадку к вашему самолету.

Затем, следуя указателям, вам необходимо будет проследовать для прохождения предполетного досмотра. Вас попросят пройти через рамку и досмотрят на наличие запрещенных к перевозу вещей. А представители пограничной службы проверят ваш паспорт и визу при необходимости.

Обратите внимание, что во время прохождения досмотра, на вопросы сотрудников службы безопасности об имеющихся у вас предметах и веществах, не следует допускать шуток, например, «это бомба», «это наркотики» и т. д. Подобные ответы рассматриваются как заявление пассажира о наличии у него опасных веществ и предметов и могут повлечь за собой снятие с рейса, и проведение дальнейшего разбирательства и привлечения к ответственности в соответствии с законодательством РФ вплоть до возбуждения уголовного дела по ст. 207 УК РФ («Заведомо ложное сообщение об акте терроризма»).
На международных рейсах, перед регистрацией все пассажиры должны пройти таможенный контроль. Во время его прохождения вы увидите два коридора: «красный» и «зеленый». Они обозначаются надписями на русском и английском языках: “Товаров, подлежащих обязательному письменному декларированию, нет” (Nothing to declare) для зеленого коридора и “Товары, подлежащие обязательному письменному декларированию” (Goods to declare) для красного коридора.
Зеленый коридор предназначен для пассажиров, которые не везут с собой товаров, подлежащих обязательному письменному декларированию.

Красный — для пассажиров, имеющих товары, подлежащие обязательному письменному декларированию, т. е. товары которые облагаются таможенной пошлиной, имеют стоимостные и количественные ограничения и т. д.

После прохождения этих формальностей, вы попадете в зал ожидания, где расположены кафе и дьюти фри (англ. Duty Free) – магазины беспошлинной торговли.
 Когда объявят посадку на ваш рейс (англ. boarding), вернитесь к вашему гейту и предъявите посадочный талон и паспорт (он не всегда требуется) представителю авиакомпании. У посадочного талона справа имеется отрывной корешок, на котором дублируется основная информация. Представитель авиакомпании его оторвет и отдаст вам. Сохраняйте талон до тех пор пока не получите багаж по прилету.
Когда объявят посадку на ваш рейс (англ. boarding), вернитесь к вашему гейту и предъявите посадочный талон и паспорт (он не всегда требуется) представителю авиакомпании. У посадочного талона справа имеется отрывной корешок, на котором дублируется основная информация. Представитель авиакомпании его оторвет и отдаст вам. Сохраняйте талон до тех пор пока не получите багаж по прилету.
Посадку объявляют несколько раз по громкоговорителю, эта же информация продублирована на информационном табло и над самим гейтом.
Если вы заблудились, то подойдите к любому служащему аэропорта и вам помогут найти нужный гейт.
Вас посадят в автобус, который отвезет всех пассажиров к трапу самолета. В больших аэропортах есть телескопические мосты, по ним вы можете прямо из терминала попасть на борт самолета.

То, что будет происходит на борту самолета не менее интересно, поэтому советуем вам прочитать нашу статью “Зачем и почему на борту самолета”. Она ответит на большинство ваших вопросов, например, почему закладывает уши при взлете и посадке, зачем выключать мобильные телефоны и многое другое.
По прилету, вас снова посадят на автобус или по мосту вы попадете в зал прилета аэропорта, там вы пройдете паспортный и таможенный контроль и заберете багаж.

Если вам предстоит рейс с пересадкой, то прочитайте нашу статью “Пересадка в аэропорту”. В ней мы ответим на самые популярные вопросы о пересадке.
Покупайте дешевые авиабилеты на сайте Kupibilet.ru!
А в нашем Телеграм-канале тоже есть полезная и актуальная информация. Рассказываем о местах, куда сразу же хочется улететь, публикуем дешёвые билеты и рассказываем новости.
29 Mar 2012 Метки: аэропорт, летим первый раз
 Доброго времени суток.
Доброго времени суток.
С развитием интернета — развиваются и многие другие сферы, тесно связанные с жизнью миллионов людей. Скажем, лет 20 назад представить себе, что любой желающий сможет в режиме реального времени смотреть на сайте какой и куда летит самолет — было что-то на грани фантастики! 😉 А теперь, это можно делать на любом компьютере, подключенном к сети интернет!
Для этого потребуется лишь знать несколько адресов в сети, на которых представлены карты полетов самолетов. Можно просматривать, как полеты всех воздушных судов, так и какого-то конкретного (например, если ждете прилета родственников и друзей). 👌
Собственно, в этой статье приведу лучшие карты, на которых сможете отслеживать все полеты гражданских воздушных судов.
Итак, начнем…
👉 Дополнение!
На некоторых сайтах, представленных ниже, может потребоваться обновление Adobe Flash Player (если у вас стоит старая версия).
*
Онлайн радары: карты полетов самолетов
Flightradar24
Сайт: https://www.flightradar24.com/
Что представляет из себя карта радара
Один из наиболее популярных радаров для отслеживания гражданской авиации. В режиме реального времени вы сможете увидеть карту, на который каждый самолет будет обозначен соответствующим значком (см. скрин выше). Сайт появился в 2006г.
Щелкнув по любому значку самолета, вы сможете узнать откуда и куда он летит (например, на скрине ниже самолет летит из Сан-Франциско в Лондон), его расписание полета, траекторию, дистанцию полета, и его время посадки. В общем-то все самое актуальное, что требуется большинству. 👍
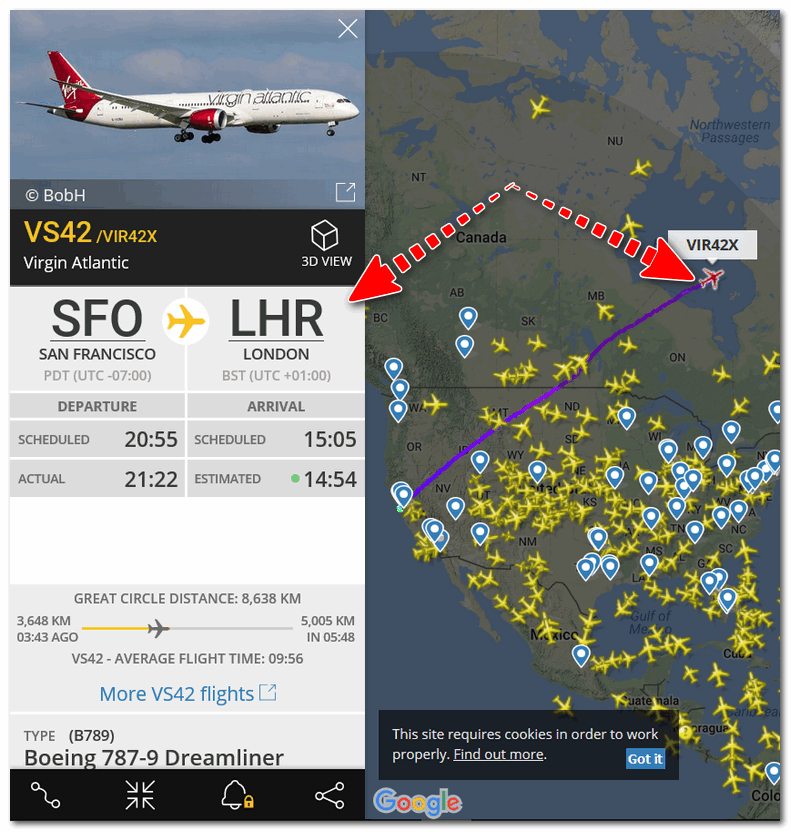
Время пути (взлет, посадка), направление (из какого города в какой)
Отмечу, что за дополнительную плату, сервис предоставляет еще больший функционал. В общем-то, рекомендую!
*
Planefinder.net
Сайт: https://planefinder.net/

Отслеживание полета авиалайнера
Функционал сайта похож на предыдущий. Здесь также представлена Мировая карта, на которой каждый авиалайнер обозначен желтым значком. Выбрав один из них – вы сможете узнать его направление движения, расписание, скорость, пройденное расстояние и т.д.
Кроме этого, верхнее меню позволяет искать самолет по его бортовому номеру (представляет из себя 5-7 символьное обозначение, по которому можно узнать кому принадлежит самолет: какой стране, перевозчику и пр.).
Кстати, на сайте ведется интересная статистика: можно узнать наиболее популярные авиалайнеры (на скрине ниже показано, что Boeing 737 и Airbus A320 — самые популярные самолеты на сегодняшний день), самые популярные направления полетов и пр.
Весьма любопытно! 👀
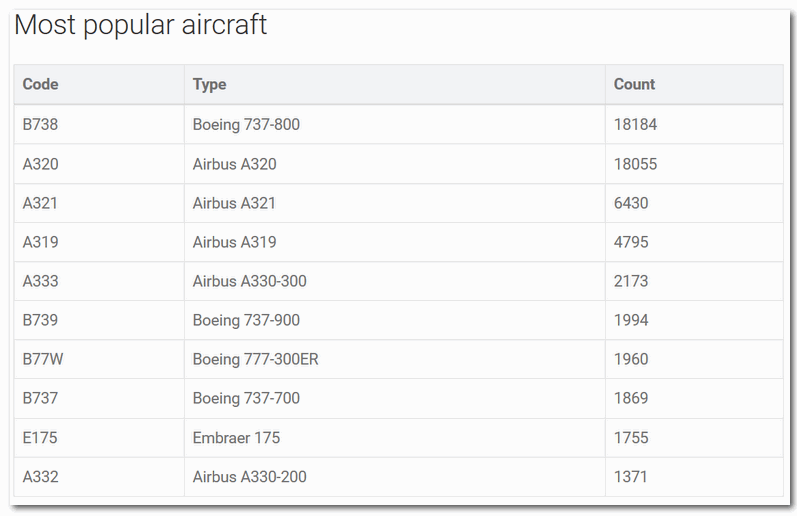
Наиболее популярные авиалайнеры
*
Flightaware.com
Сайт: https://ru.flightaware.com/
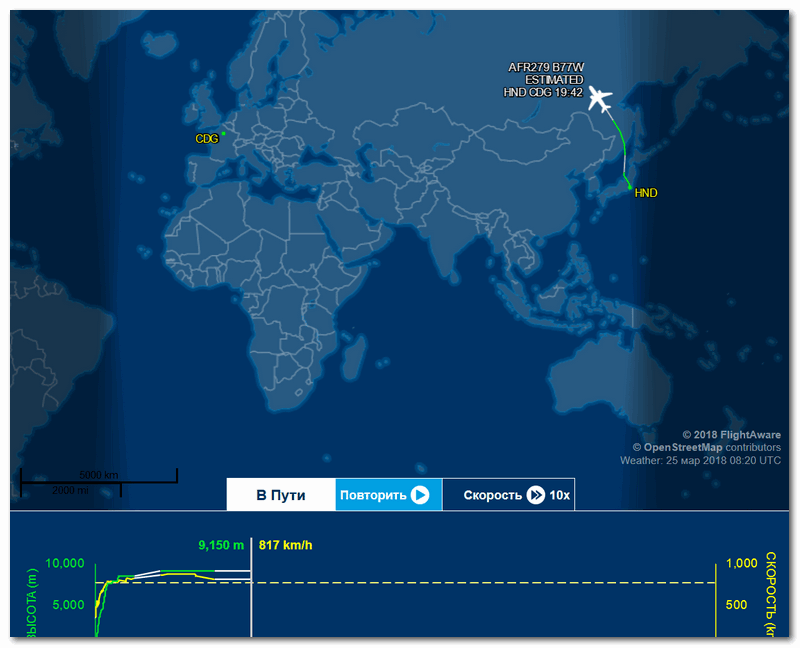
Пример отслеживания полета самолета
Очень многофункциональный сайт, и к тому же, поддерживающий русский язык в полном объеме! Данный ресурс создан американскими разработчиками и ориентирован в первую очередь на страны Америки.
Кстати, отмечу, что возможностями этого сервиса пользуются более 15 миллионов пассажиров по всему Миру, более 12 тысяч авиа-операторов (т.е. ресурс заслуживает доверия и уважения)!
Особенно хочется отметить информативность этого ресурса: выбрав нужный рейс, вы можете получить максимум информации по нему. Например, вы узнаете номер самолета, авиакомпанию, его расписание, текущие координаты, скорость, время взлета (примерное время посадки), посмотреть фото авиалайнера, узнать его предыдущие рейсы и т.д.
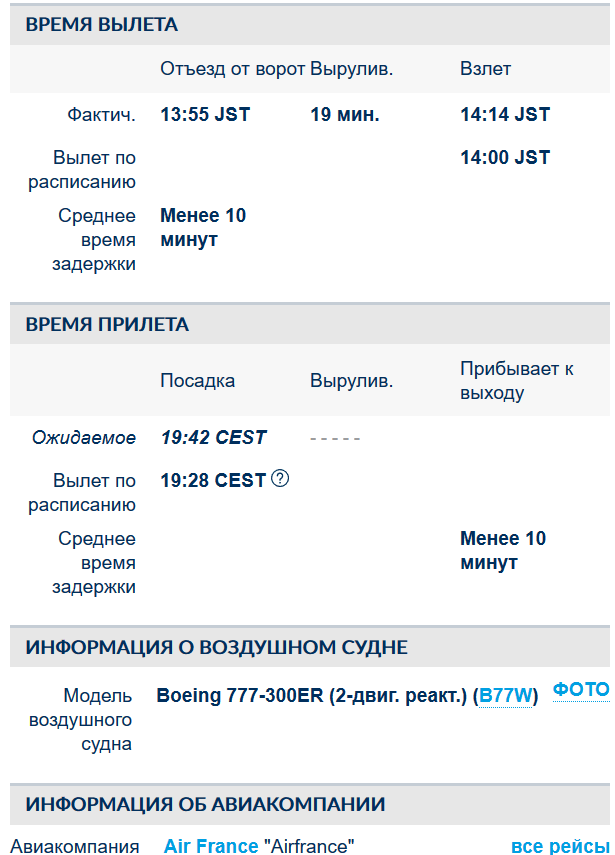
Информация о судне // Это только часть данных
*
AirNAV Radarbox24.com
Сайт: https://www.radarbox24.com/
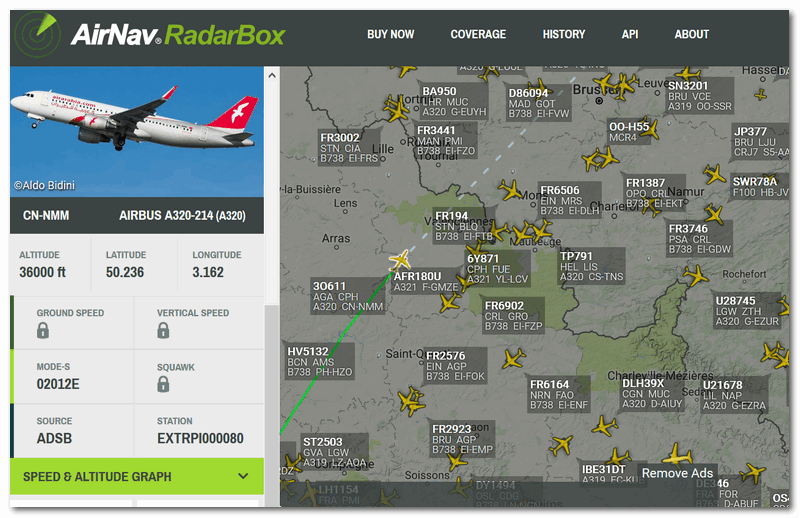
Главное окно сервиса
Ресурс создан профессиональными людьми из авиации, целью которого: быстро предоставить информацию по любому авиалайнеру, находящемуся в пути. Сервис работает на основе датчиков “ADS-B” (такие датчики установлены на подавляющем большинстве коммерческих судов) и радарной системы FAA (американская разработка). Благодаря этому, сервис одинаково хорошо отслеживает перемещение авиалайнеров, как над территорией Америки, так и над Азией, Европой и пр.
Сама работа с сайтом аналогична предыдущим: выбирайте конкретный авиалайнер на карте (либо через поисковую строку задаете бортовой номер самолета) и смотрите его текущее положение в режиме онлайн.
Отмечу, что в опциях сервиса можно менять тип карты (Terrain, Sky Vector, Hybrid, и др.), яркость и прочее. Также бы добавил, что этот сервис не на столько информативный, как предыдущий. Тем не менее, считается одним из лидеров в данной тематике, так, что рекомендую к знакомству!
*
На этом пока всё…
Удачи!
👋
Первая публикация: 25.03.2018
Корректировка: 10.05.2021


Полезный софт:
-
- Видео-Монтаж
Отличное ПО для создания своих первых видеороликов (все действия идут по шагам!).
Видео сделает даже новичок!
-
- Ускоритель компьютера
Программа для очистки Windows от “мусора” (удаляет временные файлы, ускоряет систему, оптимизирует реестр).
Подготовка и выполнение захода на посадку
Содержание
Введение
Глава
1. Общие понятия
Глава
2. Процедуры захода на посадку, повторного захода, включая процедуры снижения
шума
.1
Маневрирование при заходе на посадку
.2
Начальный участок захода на посадку
.2.1
Типы маневра обратной схемы
.2.2
Вход
.2.3
Снижение
.2.4
Влияние ветра
.3
Промежуточный участок захода на посадку
.4
Конечный участок захода на посадку
.4.1
Конечный участок захода на посадку при неточном заходе на посадку
.5
Участок ухода на повторный заход на посадку
.5.1
Этапы ухода на повторный заход
.6
Измерение шума при заходе на посадку
Глава
3. Классификация воздушных судов
Глава
4. Инструментальный заход на посадку
.1
Этапы инструментального захода на посадку
.2
Способы инструментального захода на посадку
Глава
5. Визуальный заход на посадку
.1
Характерные участки при выполнении захода на посадку
.2
Запас высоты над препятствиями
.3
Градиент набора и снижения
Глава
6. Заход на посадку с использованием различных посадочных систем
.1
Заход на посадку по системе ILS
.2
Заход на посадку по VOR или NDB
.3
Заход на посадку по двум NDB
.4
Заход на посадку по GCA
Глава
7. Анализ авиационных происшествий
Заключение
Практические
рекомендации
Список
литературы
Введение
Актуальность. Одними из основных задач воздушной
навигации является точное и надежное планирование маршрута полета в части
воздушного пространства, свободного от запретных зон и препятствий; а также
навигационный расчет захода на посадку. Для успешного выполнения этих задач,
пилот должен знать теоретические основы воздушной навигации, уметь выбирать
необходимую аэронавигационную информацию для выполнения навигационных расчетов
и выполнять их, анализировать (определять) возможность выполнения полетов в
зависимости от сложившихся обстоятельств и фактических метеорологических условий
предстоящего полета.
Знание положений воздушной навигации должно быть
неотделимой частью знаний пилота при выполнении им своих профессиональных
обязанностей.
Цель ВКР – закрепить, углубить и обобщить
знания, полученные в процессе изучения дисциплины «Воздушная навигация»,
касаемые выполнения захода на посадку.
Объект изучения. Условием успешного выполнения
захода на посадку является качественная навигационная подготовка экипажа к
полету, которая включает в себя:
этапы полета ВС, посадка ВС;
способы захода на посадку (способы, используемое
оборудование, точность, использование АНИ, особенности подготовки и выполнения,
порядок расчета экипажем).
Целью выполнения предварительных навигационных
расчетов, в зависимости от аэронавигационной обстановки и целевой задачи
предстоящего полета, является обеспечение, безопасности и экономичности
полетов.
Задача ВКР – выбрать и обобщить необходимую
информацию, связанную с подготовкой и выполнением захода на посадку. Изучить
статистику авиационных происшествий, связанных с некачественной подготовкой к
полету.
Глава 1. Общие понятия
Аэронавигация – управление траекторией движения
ВС, осуществляемое экипажем в полете. Процесс аэронавигации включает в себя
решение трех основных задач:
формирование (выбор) заданной траектории;
определение местоположения ВС в пространстве и
параметров его движения;
формирование навигационного решения (управляющих
воздействий для вывода ВС на заданную траекторию);
Наука или учебная дисциплина, изучающая эту
деятельность.
Аэронавигация как наука и учебная дисциплина.
Аэронавигация – прикладная наука о точном,
надежном и безопасном вождении ВС из одной точки в другую, о методах применения
технических средств навигации.
Район аэродрома – воздушное пространство над
аэродромом и прилегающей к нему местностью, в установленных границах в
горизонтальной и вертикальной плоскостях.
Аэродромный круг полётов (схема полета в зоне
взлета и посадки) – установленный маршрут в районе аэродрома, по которому (или
части которого) выполняется набор высоты после взлета, снижение для захода на
посадку, ожидание посадки, выполнение полета над аэродромом.
Зона взлета и посадки – воздушное пространство
от уровня аэродрома до высоты второго эшелона включительно, в границах,
обеспечивающих маневрирование воздушных судов при взлете и заходе на посадку.
Предпосадочная прямая – заключительная часть
схемы захода на посадку от точки выхода из четвертого разворота до точки
приземления.
Установленный маршрут – маршрут вне воздушной
трассы, мест-ной воздушной линии, согласованный с компетентными органами,
заинтересованными ведомствами и организациями и предназначенный для исполнения
авиационных работ.
Схема захода на посадку – установленный маршрут
в районе аэродрома, по которому воздушное судно выполняет полет от точки входа
в район аэродрома до выхода на предпосадочную прямую, то есть выполняет заход
на посадку.
Схема захода на посадку обеспечивает
безопасность, разведение прибывающих и вылетающих воздушных судов, помогает
соблюдать эшелонирование. Существует несколько типов захода, для каждого
аэродрома публикуются определённые схемы. Выбор той или иной схемы обусловлен
географическим расположением аэродрома и наличием на аэродроме того или иного
радионавигационного оборудования (например, курсо-глиссадная система, VOR, ОСП,
РСП).
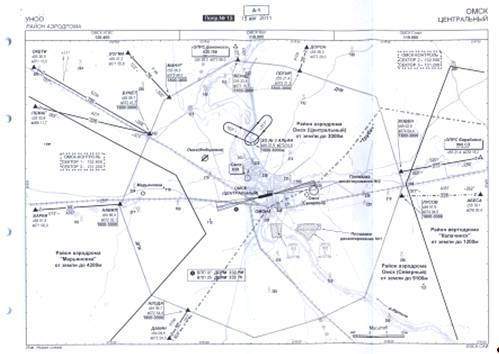
Рисунок 1. Стандартный маршрут прибытия (STAR)
При публикации схемы захода часто обозначают
термином стандартный маршрут прибытия по приборам, STAR (англ. Standard
terminal arrival route). Как правило, в данном случае, классический полет по
кругу не находит применения, схемы чаще приводят сразу в район третьего или
четвертого разворота или на предпосадочную прямую.
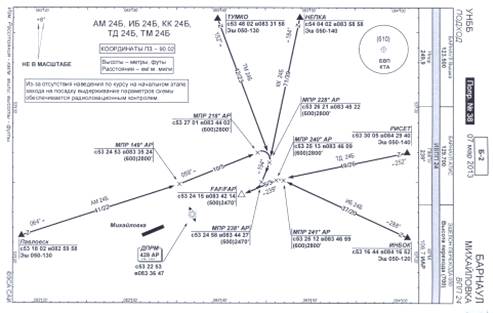
Рисунок 2. Схема подхода аэродрома Барнаул
(Михайловка)
В СССР наибольшее распространение получила схема
полета по аэродромному кругу типа «коробочка» (практически существовала одна
универсальная схема для всех аэродромов с небольшими вариациями). Маршрут
(«круг») выглядит как прямоугольник со скруглёнными углами (так называемыми
«разворотами»). После взлёта и набора безопасной высоты самолёт выполняет
первый разворот на 90° вправо или влево (соответственно схемы бывают правые и
левые), затем для создания бокового уклонения относительно ВПП 4, 7 или 12 км
(или другое установленное расстояние – ширина прямоугольного маршрута (ШПМ))
выполняется второй разворот и самолёт движется параллельно ВПП в направлении
обратном направлению взлёта и посадки. Затем выполняются соответственно третий
и четвёртый развороты. Места выполнения разворотов – определённые
географические точки (указанные на схеме захода на посадку для данного
аэродрома).
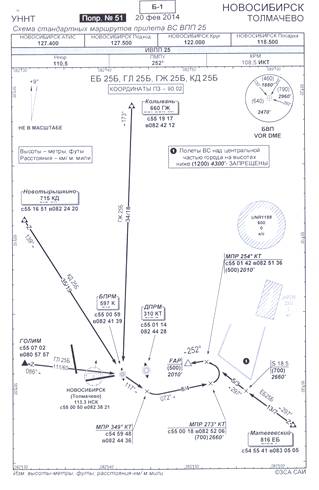
Рисунок 3. Схема стандартных маршрутов прилета
аэродрома Новосибирск (Толмачево)
При прилете диспетчер может направить воздушное
судно к второму, третьему или сразу четвёртому развороту, или, например, к
траверзу ДПРМ, это означает, что экипаж начинает выполнение схемы с указанной
точки. Полёт по кругу выполняется на высоте круга, кроме того для каждого
разворота может быть отдельно задана высота полета. Данная схема полета
позволяет достаточно просто и с достаточной точностью выйти на предпосадочную
прямую.
Сначала может выполняться пролет любого
ориентира ВПП (привода (ДПРМ, БПРМ), VOR, маркерного радиомаяка, самой ВПП,
даже, например, костра), затем выполняется полет по прямоугольному маршруту с
регистрацией времени полета на каждом отрезке. Зная скорость и время полета
легко вычислить пролетаемые расстояния. Зная расстояние между первым и вторым
разворотами легко найти время полета между третьим и четвертым разворотами для
выхода на предпосадочную прямую в створ полосы. Для этого так же может
применяться фиксированное время полета после прохождения траверза привода.
Из-за сильно возросшей в наши дни нагрузки на аэродромы,
классический полет по аэродромному кругу встречается реже, оставаясь возможным
лишь для выполнения особых процедур, например, полет без возможности ведения
радиосвязи. Схема же ухода на второй круг часто выполняется через обязательное
нахождение в зоне ожидания.
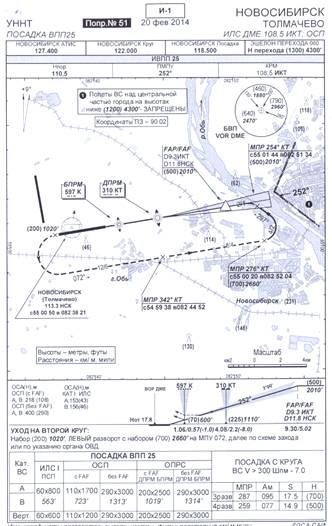
Рисунок 4. Схема посадки аэродрома Новосибирск
(Толмачево)
Глава 2. Процедуры захода на посадку, повторного
захода, включая процедуры снижения шума
.1 Маневрирование при заходе на посадку
Корпорация JEPPESEN помещает в JAM карты (схемы)
процедуры захода на посадку, опубликованные в AIP различных государств и если
то или иное государство представляет информацию, в соответствии с какими
правилами рассчитаны процедуры захода на посадку, то корпорация JEPPESEN при
издании таких карт помещает в левом нижнем углу специальную сноску. Встречается
следующие сноски:- номер поправки Х процедуры. Возросший номер Х указывает на
изменение процедуры.- военный (для построения процедур использовался военный
источник).OPS – наличие данной сноски указывает, что государство установило
процедуру захода на посадку по приборам в соответствии с DOC 8168 том 2, 1 и 2
издание.OPS 3 – DOC 8168 том 2 3 издание.OPS – JEPPESEN OPS – государство
установило процедуру согласно ИКАО.
С целью повышения точности навигации по
маршрутам STAR государства публикуют карты (схемы) с обозначением RNAV STAR или
FMS STAR, выполнение предписанных маршрутов подхода осуществляется ВС,
оборудованных средством зональной навигации.
Схема захода на посадку по приборам может иметь
пять отдельных участков:
прибытие с маршрута (Arrivalroute);
начальный (Initial);
промежуточный (Intermediate);
конечный (Final);
уход на повторный заход (Missedapproach).
Участки захода на посадку начинаются и
заканчиваются в пределах, установленных контрольными точками.
Знание участков маршрута прибытия для захода на
посадку предполагает знание пилотом критериев пролета препятствий, выдерживания
ограничений по скорости, кренов и других параметров, которые свойственны
каждому участку.
На многих схемах захода на посадку публикуется
точка IAF с целью представления пилоту информации, что после пролета этой точки
ВС находится вне пределов маршрутной структуры и начинается участок
осуществления маневра для захода на посадку.(InitialApproachFix) – фиксированная
точка начального этапа захода на посадку(IntermediateFix) – фиксированная точка
промежуточного этапа;(FinalApproachPoint) – точка конечного этапа захода на
посадку;(FinalApproachFix) – фиксированная точка конечного этапа захода на
посадку;(MissedApproachPoint) – точка ухода на повторный заход
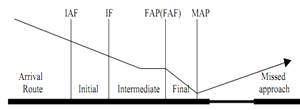
Рисунок 5. Участки схемы захода на посадку
.2 Начальный участок захода на посадку
На начальном участке захода на посадку в
основной зоне обеспечивается минимальный запас высоты над препятствием (МОС)
300м.
Очень часто ВС выходит в район аэродрома с
направлений, противоположных посадочному путевому углу. В этом случае для
выхода на промежуточный или конечный этап предписывается выполнение маневра
обратной схемы.
.2.1 Типы маневра обратной схемы
Существует три типа маневра, которые относятся к
обратной схеме:
. Стандартный разворот на 45º/180º
начинается
в точке местонахождения навигационного средства или в контрольной точке и
состоит из:
прямого участка с наведением по линии пути; этот
прямой участок может ограничиваться временем полета, радиалом и расстоянием по
DME;
разворота на 45º;
– прямого участка без наведения по линии пути;
длина участка ограничивается временем полета, которое составляет 1 мин с
момента начала разворота для ВС категорий А и В и 1 мин 15с с момента начала
разворота для ВС категорий C, D, и Е;
разворота на 180º в
противоположном направлении для выхода на линию пути приближения.
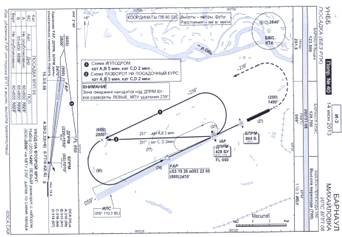
Рисунок 6. Обратная схема захода на посадку типа
«ипподром»
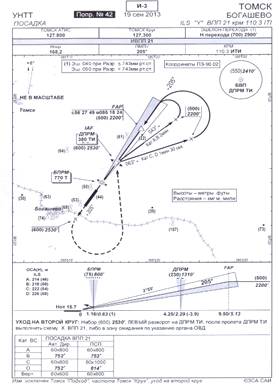
Рисунок 7. Обратная схема захода на посадку типа
«Разворот на посадочный курс»
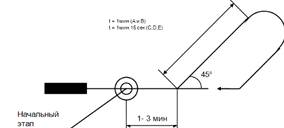
Рисунок 8. Стандартный разворот
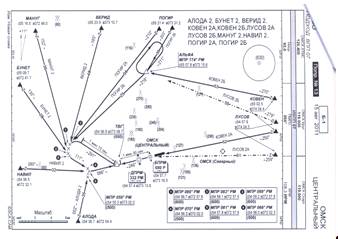
Рисунок 9. Схема подхода аэродрома Омск
(Центральный)
. Стандартный разворот на 80º/260º
начинается
в точке нахождения навигационного средства или в контрольной точке и состоит
из:
прямого участка с наведением по линии пути: этот
прямой участок может ограничиваться временем полета, радиалом или расстоянием
по DME;
разворота на 80º;
– разворота на 260º в
противоположном направлении для выхода на линию пути приближения.
Стандартным разворот считается левым/правым,
если первоначальный отворот производится влево/вправо.
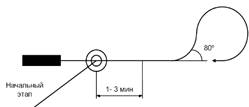
Рисунок 10. Обратная схема – стандартный
разворот
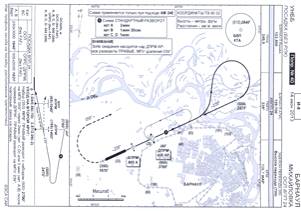
Рисунок 11. Схема посадки аэродрома Барнаул
(Михайловка)
. Обратный разворот на посадочную прямую,
состоящий из указанной обратной линии пути и заданной длительности полета или
расстояния по DME от навигационного средства с последующим разворотом для
выхода на линию пути приближения. Обратная линия пути и/или время полета могут
отличаться для различных категорий ВС. В этом случае публикуются отдельные
схемы.
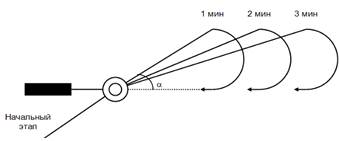
Рисунок 12. Обратная схема – разворот на
посадочный курс
В том случае, когда прямолинейный участок не
имеет достаточной протяженности для необходимой потери абсолютной высоты и
когда целесообразно выполнять вход в обратную схему, то применяется схема типа
«ипподром».
Схема типа «ипподром» состоит из разворота от
линии пути приближения на 180º после
пролета навигационного средства или контроль-ной точки с выходом на обратную
линию пути при длительности полета по этой линии в течение 1, 2 или 3 мин с
последующим разворотом на 180º в
том же направлении для возвращения на линию пути приближения. Вместо временного
предела для полета по участку обратной линии пути в качестве предела может
использоваться расстояние по DME или пересекающий радиал/пеленг. Как правило,
схема типа «ипподром» применяется в тех случаях, когда ВС прибывает, пролетая
над контрольной точкой, с различных направлений. В этих случаях предполагается,
что ВС будут входить в схему точно также, как это предписывается в отношении
входа в зону ожидания, с учетом того, что:
а) смещенный вход из сектора 2 ограничивает
время полета по смещенной на 30º линии
пути до 1 мин 30с, после чего предполагается, что за оставшееся время удаления
пилот выполнит разворот на курс, параллельный обратной линии пути, если время
полета в сторону удаления составляет лишь 1 мин, время полета по смещенной на
30º
линии
пути также составляет 1мин.
б) параллельный вход не выполняется
непосредственно с возвращением к средству без предварительного пересечения
линии пути приближения при выходе на конечный участок схемы захода на посадку.
в) все маневры выполняются на стороне
маневрирования. В том случае, когда отсутствуют карты (схемы STAR, поясняющие
процедуру прибытия), необходимо руководствоваться положениями DOC – 8168.
основные требования этого документа изложены в JAM в разделе ATC на стр. серии
200 ниже изложены требования по выполнению процедур обратных схем.
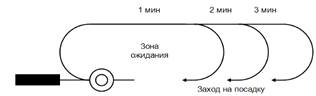
Рисунок 13. Обратная схема типа Ипподром
2.2.2 Вход
Если в схеме не содержаться особые ограничения по
входу, вход в обратные схемы осуществляется с линии пути + 30º
от
линии пути обратной схемы.
Прибытие с различных направлений с
использованием схемы ожидания и обратной схеме показано на рисунке 14.
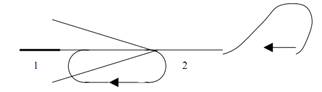
Рисунок 14. Обратная схема захода с
использованием схемы ожидания
На карте захода на посадку схема типа «ипподром»
может быть показана линией различной толщины: тонкой и утолщенной. Если схема
типа «ипподром» относится к процедуре захода на посадку, то она обозначена
утолщенной линией, а если к зоне ожидания, – тонкой линией.
Ограничения по скорости могут быть опубликованы
на карте захода на посадку дополнительно к ограничениям по категории ВС или
вместо них. Пилот ВС не должен превышать эти скорости в целях обеспечения нахождения
ВС в пределах защищенного пространства.
.2.3 Снижение
Воздушное судно должно быть выведено на
контрольную точку или навигационное средство, после чего продолжается полет по
заданной линии пути удаления, при необходимости снижаясь на заданную высоту.
Если после разворота в сторону приближения предусматривается дальнейшее
снижение, то это снижение не должно начинаться до выхода на линию приближения.
Под термином «выход» рассматривается положение ВС в пределах половины
отклонения на полную шкалу для ILS и VOR или в пределах + 5º
относительно
требуемого пеленга по NDB.
Временной допуск для схемы типа «ипподром». Если
схема основана на навигационном средстве, то время полета по линии пути
удаления отсчитывается с момента нахождения ВС на траверзе навигационного
средства или с момента достижения ВС курса следования по линии пути удаления, в
зависимости от того, что наступает позднее. Если схема основана на контрольной
точке, то разворот на линию пути приближения следует начинать в заданных
пределах времени (с поправкой на ветер) или при выходе на какое-либо расстояние
по DME или радиал/пеленг, определяющий предельное расстояние, в зависимости от
того, что наступает раньше.
.2.4 Влияние ветра
Как по курсу, так и по времени пилот должен
вносить соответствующие поправки для компенсации влияния ветра в целях как
можно более точного и быстрого возврата на линию пути приближения для
осуществления захода на посадку с установившейся скоростью. При внесении таких
поправок необходимо в полной мере использовать имеющиеся показания
навигационного средства и данные о расчетном или известном ветре. Если задано
расстояние по DME или радиал/пеленг, то его нельзя превышать при полете по
линии пути удаления.
Скорости снижения. Заданные временные допуски и
абсолютные высоты полета по схеме основаны на вертикальных скоростях снижения,
которые не превышают значений, указанных в таблице:
Максимальное снижение, которое должно
оговариваться
в обратной схеме или в схеме типа «ипподром»
Таблица 1. Максимальное снижение в обратной схеме
типа «Ипподром»
|
Линия |
удаления |
приближения |
||
|
Категория |
А, |
C, |
А, |
C, |
|
Максимальное |
245 |
365 |
150 |
230 |
Угол крена. Схемы основываются на среднем
достигаемом угле крена 25º или на угле
крена, обеспечивающем разворот с угловой скоростью 3º/с
(берется наименьшая величина).
.3 Промежуточный участок захода на посадку
На этом участке производится корректировка
конфигурации и скорости ВС для его подготовки к конечному этапу захода на
посадку. По этой причине применяется как можно меньший градиент снижения. На
данном этапе величина МОС уменьшается с 300 до 150 м в основной зоне в
поперечном направлении до нуля на внешней границе дополнительной зоны.
В том случае, когда на схеме опубликована
контрольная точка конечного этапа захода на посадку (FAF), промежуточный
участок захода на посадку начинается с того момента, когда ВС находится на
линии пути приближения стандартного разворота, обратного разворота на
посадочную прямую или на конечном участке схемы типа «ипподром».
.4 Конечный участок захода на посадку
На конечном участке захода на посадку
производится вывод ВС в створ ВПП и снижение для посадки. Конечный участок
захода на посадку может завершиться либо подлетом к ВПП для посадки спрямой,
либо подлетом для визуального маневрирования с целью посадки.
Участок конечного этапа захода на посадку
начинается в точке FAF при неточном заходе на посадку или в точке FAP при
точном заходе на посадку и заканчивается в точке MAP.
.4.1 Конечный участок захода на посадку при
неточном заходе на посадку
На данном участке ВС выбирает конфигурацию для
конечного этапа захода на посадку и производит снижение до MDA/H при заходе на
посадку спрямой или при визуальном маневрировании.
Воздушное судно пересекает точку FAF на
указанной абсолютной/относительной высоте или выше, а затем начинает снижение.
С целью расчета пилотом снижения на карте захода на посадку в нижнем левом углу
публикуется градиент. Для указанного градиента снижения и путевой скорости
полета (в узлах) на прямой дается значение вертикальной скорости снижения
(фут/мин), которое носит рекомендательный характер.
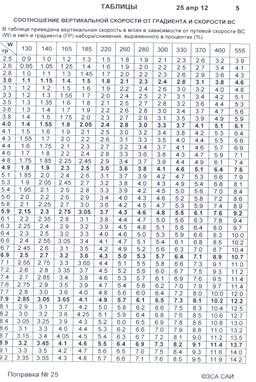
Рисунок 15. Информация о градиенте снижения и
расчетной вертикальной скорости снижения в зависимости от путевой скорости
Таблица 2. Соотношение дальность – абсолютная
(относительная) высота
|
Gndspeed-Kts |
70 |
90 |
100 |
120 |
140 |
160 |
|
DesentGradient |
355 |
456 |
507 |
608 |
709 |
811 |
|
MAP |
При наличии на аэродроме удобно расположенного
маяка DME представляется информация о профиле снижения в соотношении: дальность
– абсолютная (относительная) высота.
Если на карте захода на посадку опубликована
схема ступенчатого снижения с использованием удобно расположенного маяка DME,
то пилот не должен снижаться до тех пор, пока не выйдет на указанную линию пути
и не пройдет указанный рубеж по DME на опубликованной высоте, после чего пилот
начинает снижение, удерживая ВС на указанной абсолютной (относительной) высоте
или выше в соответствии с расстоянием по DME.
Если аэродром оборудован единственным
навигационным средством, расположенным на нем или вблизи него, то это средство
будет служить одновременно в качестве точек IAF и MAP. На таких аэродромах
указывается минимальная абсолютная/относительная высота полета по обратной
схеме или по схеме типа «ипподром» и OCA/H для конечного этапа захода на
посадку. При отсутствии точки FAF снижение до MDA/H производится после выхода
ВС на линию пути приближения конечного этапа захода на посадку.
Конечный участок захода на посадку при заходе на
посадку по ILS начинается в точке FAP. Эта точка расположена в пространстве на
осевой линии курсового радиомаяка в точке прохождения номинальной глиссады на
абсолютной/относительной высоте промежуточного этапа захода на посадку.
Защитная зона конечного этапа захода на посадку
по ILS значительно уже аналогичных зон при неточных заходах на посадку.
Снижение по глиссаде ни в коем случае не начинается до тех пор, пока ВС не
войдет в зону допусков осуществляющего наведение курсового радиомаяка. При
полете на прямой предполагается, что пилот будет пилотировать таким образом,
чтобы отклонение по курсу и глиссаде (ниже глиссады) не превышало половины
шкалы. При больших отклонениях с учетом допусков для системы ILS ВС может
оказаться за пределами защищаемого воздушного пространства, где может не быть
защиты от столкновения с препятствиями.
Зона конечного этапа захода на посадку по ILS,
как правило, включает контрольную точку или навигационное средство, которое
позволяет произвести проверку точности выдерживания глиссады по высотомеру.
Обычно для этой цели используется внешний маркерный радиомаяк (ОМ). Снижение до
высоты, которая является меньшей, чем абсолютная/относительная высота полета
контрольной точки, не следует производить до пролета этой контрольной точки.
При заходе на посадку в условиях отрицательной
температуры необходимо учитывать температурную погрешность барометрического
высотомера.
В тех случаях, когда при заходе на посадку
теряется наведение по глиссаде, заход на посадку становится неточным и
выполняется по правилам и минимуму неточного захода на посадку.
.5 Участок ухода на повторный заход на посадку
Участок ухода на повторный заход начинается в
точке MAP и состоит из трех этапов (начального, промежуточного, конечного).
Схема ухода на повторный заход предназначена для
предотвращения столкновения с препятствиями при выполнении ухода на повторный
заход.
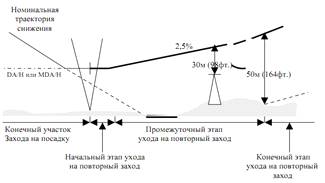
Рисунок 16. Схема ухода на повторный заход
На схеме указывается точка, где начинается уход
на повторный заход. Уход на повторный заход должен начинаться не ниже, чем DA/H
в схеме точного захода на посадку или не ниже, чем MDA/H в схеме неточного
захода на посадку или захода на посадку с круга.
.5.1 Этапы ухода на повторный заход
Точка начала ухода на повторный заход в схеме
вертикального профиля может обозначаться:
точкой пересечения электронного луча глиссады
ILS и применяемой DA/H; или
навигационным средством; или
контрольной точкой; или
указанным расстоянием или времени полета от
точки FAF.
На нижеследующем рисунке точка начала ухода на
повторный заход при точном заходе на посадку по ILS начинается на высоте DA/H,
а при неточном заходе – на удалении 1,0 м.мили от DME ILS с позывными IKL. Эта
точка обозначена буквой «М» (первая буква аббревиатуры МАР).
В том случае, когда уход на повторный заход
начинается до достижения точки МАР, предполагается, что обычно пилот продолжает
полет к точке МАР, а затем будет следовать схеме ухода на повторный за-ход с
предотвращением выхода за пределы защищаемого воздушного пространства.
Примечание. Допускается пролет над точкой МАР на
большей абсолютной/относительной высоте, чем это предусмотрено схемой (рис 17).
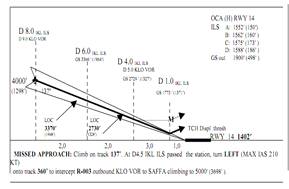
Рисунок 17. Схема захода на посадку. Вид сбоку
Обычно схемы ухода на повторный заход
основываются на номинальном градиенте набора высоты, равном 2,5%. Если
используется другой градиент, то об этом указывается на карте захода на посадку
по приборам.
Начальный этап ухода на повторный заход
начинается в точке МАР и заканчивается в точке, где устанавливается режим
набора высоты. Маневрирование на этом этапе требует от пилота повышенного
внимания, особенно при переходе к набору высоты и изменений конфигурации ВС. В
этой связи при выполнении данного маневра, как правило, невозможно полностью
использовать оборудование наведения и поэтому на данном этапе не выполняется
процедура разворота.
На промежуточном этапе продолжается набор
высоты, как правило, при полете по прямой до точки, которая достигается и может
выдерживаться высота пролета препятствий в 50м (164фт.). Линия пути
промежуточного этапа может иметь отвороты максимум на 15˚ относительно
линии пути начального этапа ухода на повторный заход. Предполагается, что на
этом этапе пилот начинает корректировать полет по линии пути.
Конечный этап ухода на повторный заход
начинается в точке, где впервые достигается и обеспечивается высота пролета
препятствий 50 м (164фт.). Он продолжается до точки, в которой начинается новый
заход на посадку, полет в зоне ожидания или выполняется полет по маршруту. На
этом этапе возможно выполнение разворота.
Пилот должен действовать согласно всем пометкам,
имеющимся на карте захода на посадку, и выполнять соответствующие маневры без
чрезмерной задержки.
.6 Измерение шума при заходе на посадку
Приемы снижения шума при заходе на посадку
должны соответствовать следующим требованиям:
а) не следует требовать, чтобы самолет находился
в какой-либо конфигурации конечного этапа посадки в любой точке после пролета
внешнего маркера или на расстоянии 5м. миль от порога намеченной для посадки
ВПП, в зависимости от того, что наступает раньше;
в) никакие приемы снижения шума не должны
предусматривать превышения скорости снижения.
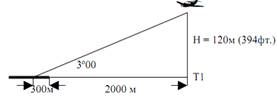
Рисунок 18. Измерение шума при заходе на посадку
Т1 – точка измерения шума при заходе на посадку
Приемы снижения шума не должны применяться в
следующих неблагоприятных условиях:
когда прогнозируется или сообщается о наличии
сдвига ветра или ожидается, что грозы могут повлиять на заход на посадку.
Глава 3. Классификация воздушных судов
Согласно стандартам ИКАО все ВС по скорости
разделены на 5 категорий. На основе этого разграничения производится
определение посадочного минимума ВС и параметров захода на посадку.
Классификация ВС (Aircraft Approach Category ICAO) по скоростям (приборным) для
расчета схем захода на посадку представлены в следующей таблице (верхнее
значение указано жирным шрифтом в километрах в час, нижнее – в милях в час,
узлах):
Таблица 3. Классификация ВС
|
Категория |
Vat, |
Скорости |
Скорости |
МАХ |
MAX |
|
|
промежуточный |
конечный |
|||||
|
A |
< |
165/280 |
130 |
185 |
185 |
205 |
|
B |
169 |
220/280 |
155 |
250 |
240 |
280 |
|
C |
224 |
295 |
215 |
335 |
295 |
445 |
|
D |
261 |
345 |
240 |
380 |
345 |
490 |
|
E |
307 |
345 |
285 |
445 |
425 |
510 |
Vatскорость пересечения порога ВПП, в 1.3 раза
превышающая скорость сваливания в посадочной конфигурации при максимальной
сертифицированной посадочной массе.
* максимальная скорость для обратной схемы
захода и схемы “Ипподром”.
Кроме того, для определения класса ВС можно
пользоваться таблицей классификации ВС Стандартов США для полетов по приборам в
зоне аэроузла (TERPs). Эта классификация проводится на основе приборной
скорости, в 1,3 раза превышающей скорость сваливания в посадочной конфигурации
при максимальной сертифицированной массе (Vso). Данная классификация в общем
аналогична вышеуказанной классификации, за исключением рекомендованных
скоростей для расчета параметров при заходе на посадку:
Таблица 4. Классификация ВС стандартов США для
полетов по приборам в зоне TERPs
|
Категоря |
1,3 |
1,3 |
|
A |
< |
< |
|
B |
91 |
169 |
|
C |
121 |
224 |
|
D |
141 |
261 |
|
E |
> |
307 |
Примечание: Категория Е только для военных ВС.
В соответствии с данной классификацией
российские ВС классифицируются следующим образом:
Таблица 5. Классификация российских ВС
|
Категоря |
Классификационная |
Типы |
|
A |
< |
Ан-2, |
|
B |
169 |
Як-40, |
|
C |
224 |
Ан-32, |
|
D |
261 |
Ил-18, |
|
E |
307 |
Глава 4. Инструментальный заход на посадку
Для предпосадочного маневрирования ВС в районе
аэродрома при выполнении захода на посадку выделяется участок воздушного
пространства в вертикальной и горизонтальной плоскостях, сужающийся по мере
уменьшения расстояния до ВПП. Размеры этого пространства обусловлены:
В вертикальной плоскости снизу – требованиями
безопасности пролета над препятствиями; сверху – требованиями безопасности от
столкновений ВС, заходящих на посадку, с ВС, следующими по маршрутам, а также
вертикальными границами зоны аэродромного движения или диспетчерской зоны.
В горизонтальной плоскости – видами применяемых
посадочных устройств и их точностью, а также точностью выполнения
предусмотренных предпосадочных маневров.
Заданная траектория движения ВС, выполняющего
заход на посадку, лежит в центральной части рассматриваемого пространства и
сов-падает в горизонтальной и вертикальной плоскостях с положением предусмотренных
маневров инструментального захода на посадку и номинальных линий посадочного
курса и глиссады снижения.
Для выполнения инструментального захода на
посадку и посадки при автоматическом и ручном пилотировании ИКАО определила
посадочные категории (посадочные метеоминимумы):
Таблица 5. Посадочные метеоминимумы
|
Посадочные |
Метеоусловия |
Требования |
||||
|
Облачность |
Видимость |
|||||
|
Н, |
Н, |
V, |
V, |
|||
|
1 |
60 |
200 |
800 |
2400 |
Полуавтоматическое |
|
|
2 |
30 |
100 |
350 |
1200 |
Автоматическое |
|
|
3 |
А |
30 |
100 |
200 |
700 |
Автоматическое |
|
В |
15 |
50 |
50 |
150 |
Автоматическое |
|
|
С |
0 |
0 |
0 |
Автоматическое |
Инструментальный заход на посадку – серия
заранее предусмотренных маневров, выполняемых по правилам полета по приборам,
обеспечивающая правильность полета ВС от точки ухода с трассы (последней РНТ
трассы) или FIX зоны ожидания до визуального контакта с зоной приземления или
посадки, выполняемой автоматически.
Инструментальный заход на посадку может быть
точным, или неточным.
Точный заход – инструментальный заход на посадку
при наличии посадочных устройств, формирующих электронную глиссаду снижения
(заход по ILS, PAR, RMS…)
Неточный заход – инструментальный заход на
посадку, при котором электронная глиссада снижения, формируемая
соответствующими посадочными устройствами, отсутствует (заход по LOC, VOR,
VORTAC, NDB и так далее).
.1 Этапы инструментального захода на посадку
Различают пять отдельных участков (этапов)
инструментального захода на посадку:
Участок подхода (Arrival Route) – полет на
последнем участке маршрута до контрольной точки начального участка захода на
посадку (Initial Approach Fix – IAF). При необходимости публикуется на схемах
STAR. На маршруте подхода применяются критерии безопасности пролета препятствий
аналогичные критериям маршрутной структуры.
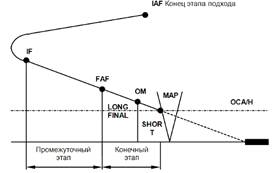
Рисунок 19. Этапы инструментального захода на
посадку
Начальный участок (Initial Approach Segment) –
полет от точки IAF до контрольной точки промежуточного этапа захода на посадку
(Intermediate Approach Fix – IF). Этот и последующие этапы должны иметь
контрольные точки. При полете на начальном этапе ВС находится вне маршрутной
структуры и осуществляет маневр для выхода на промежуточный участок захода на
посадку. Скорость и конфигурация ВС зависят от расстояния до аэродрома и
потребного снижения. Зона начального этапа захода может иметь протяженность 15
– 30 морских миль (25 – 50 километров) и ширину не менее 10 морских миль (по 5
миль в каждую сторону от оси маршрута). Обеспечивается безопасная высота
пролета над препятствиями 1000 футов (300 метров). Высота полета на начальном
участке – не менее высоты входа в глиссаду или начальной высоты выполнения
схемы захода на посадку.
В случае отсутствия подходящей точки начального
или промежуточного этапа захода на посадку, применяется обратная схема захода,
схема “Ипподром” и так далее.
Промежуточный участок (Intermediate Approach
Segment) – полет от точки IF до контрольной точки конечного этапа захода на
посадку (Final Approach Fix – FAF, USA или Final Approach Point – FAP, ICAO).
На этом этапе производится корректировка конфигурации и скорости полета ВС для
подготовки к конечному этапу захода на посадку. На схемах, где указана FAF
(указывается знаком ´), промежуточный участок
начинается с того момента, когда ВС находится на линии пути приближения
стандартного разворота, обратного разворота на посадочный курс или на конечном
участке приближения схемы “Ипподром”. Там, где не указана точка FAF,
линия пути приближения представляет собой конечный участок захода на посадку, а
промежуточный этап отсутствует.
Точка IF и весь промежуточный участок должны
лежать на линии посадочного курса. Если заход на посадку осуществляется по
неточным системам, отклонение промежуточного этапа от линии посадочного курса
должно быть £10°. Угол между
начальным этапом и линией посадочного курса для точных систем должен быть £90°,
для неточных систем – £120°.
Конфигурация и размеры зоны промежуточного этапа
зависят от применяемых посадочных устройств и схемы захода на посадку, но ее
протяженность не должна быть менее 8,5 морских миль. Безопасная высота пролета
препятствий на этом участке составляет 500 футов (150 метров).
Конечный этап (Final Approach Segment) – полет
от точки FAF до точки ухода на второй круг (Missed Approach Point – MAP). Этот
этап делится на две стадии:
Дальняя прямая (Long Final) – участок полета до
внешнего маркера.
Ближняя прямая (Short Final) – участок полета от
внешнего маркера до точки MAP, после которой может быть выполнена посадка или
начат уход на второй круг.
При выполнении точного захода на посадку точка
FAF находится в точке входа в глиссаду, пролет которой производится, как
правило, на относительных высотах от 1000 до 3000 футов или на расстоянии от 3
до 10 морских миль от порога ВПП.
При выполнении неточного захода точка FAF может
располагаться над радионавигационным средством или может определяться по
дальности от радионавигационного средства (обозначается знаком ´
на схемах профиля полета при заходе на посадку). В этом случае ВС пересекает
FAF на указанной абсолютной (относительной) высоте или выше, а затем начинает
снижение. На схемах в расчетных таблицах публикуется градиент снижения, а если
есть информация о дальности полета, представляются данные о профиле снижения.
В некоторые схемы неточного захода на посадку
может быть включена точка ступенчатого снижения. В этом случае указываются два
значения ОСА/Н: большее значение, применяемое в основной схеме, и меньшее
значение, применяемое только в тех случаях, если контрольная точка ступенчатого
снижения точно определяется при заходе на посадку. Как правило, указывается
только одна контрольная точка ступенчатого снижения, однако при полете по схеме
с применением VOR/DME может быть установлено несколько контрольных точек по
DME, каждая из которых связана с минимально допустимой абсолютной высотой
пролета препятствий.
Если аэродром оборудован единственным
навигационным средством, расположенным на нем или вблизи его, при отсутствии
какого – либо другого удобно расположенного навигационного средства, для
образования FAF может быть разработана схема, где имеющееся навигационное
средство будет служить одновременно в качестве IAF и MAP.
На этих схемах будет указана минимальная /
относительная высота для полета по обратной схеме или схеме типа
“Ипподром” и OCA/H для конечного этапа захода на посадку. При
отсутствии FAF снижение до MDA/H производится после выхода ВС на линию пути
приближения конечного этапа захода на посадку.
Как правило, линия пути конечного этапа захода
на посадку схем подобного типа не может быть сопряжена по прямой с осевой
линией ВПП. Решение публиковать или нет ОСА/Н в числе ограничений захода на
посадку спрямой зависит от величины углового расхождения между линией пути и
осевой линией ВПП.
Зона конечного этапа захода на посадку по ILS
значительно уже аналогичных зон при неточном заходе на посадку. Снижение по
глиссаде ни в коем случае не начинается до тех пор, пока ВС не войдет в зону
допусков осуществляющего наведение курсового маяка. При построении поверхностей
предельных высот препятствий для ILS допускается, что экипаж ВС после
установившегося полета по осевой линии, как правило, отклоняется от курса не
более чем на половину шкалы нулевого индикатора. После этого ВС должно
удерживаться на курсе и глиссаде, поскольку отклонение от курса более чем на
половину сектора курса или отклонение от глиссады более чем на половину шкалы
“лети выше” в сочетании с другими допусками для системы может
привести ВС к границе или к нижнему пределу защищаемого воздушного
пространства, где может не гарантироваться безопасность от столкновения с
препятствиями.
аэродром посадка маневр
воздушный
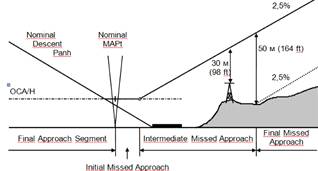
Рисунок 20. Этапы ухода на второй круг
В случаях, когда при заходе теряется наведение
по глиссаде, заход на посадку становится неточным. В этом случае применяется
значение ОСА/Н, публикуемое для ситуаций, когда глиссадный радиомаяк не
работает.
Уход на второй круг (Missed Approach) –
неудавшийся заход на посадку. Во время этапа ухода на второй круг при полете по
схеме за-хода по приборам экипажу ВС необходимо изменить конфигурацию ВС,
угловое пространственное положение и абсолютную высоту ВС. В силу этого схема
ухода на второй круг максимально упрощена и со-стоит из трех этапов –
начальный, промежуточный и конечный.
Схема ухода на второй круг, предназначенная для
предотвращения столкновения с препятствиями при выполнении маневра ухода на
второй круг, предусматривается для каждой схемы захода на посадку по приборам.
На схеме указываются точка, где начинается уход на второй круг, а также точка
или абсолютная / относительная высота, где он заканчивается. Допускается, что
уход на второй круг должен начинаться не ниже, чем DA/H в схемах точного захода
на посадку, или при применении схем неточного захода – в указанной точке,
которая расположена не ниже, чем MDA/H.
Точка начала ухода на второй круг (MAP) в схеме
может обозначаться:
Точкой пересечения электронного луча глиссады
ILS и применяемой DA/H.
Навигационным средством.
Контрольной точкой.
Указанием расстояния от контрольной точки
конечного этапа захода на посадку (FAF).
В том случае, если МАР определяется
навигационным средством или контрольной точкой, как правило, также публикуется
расстояние от FAF до МАР, которое может использоваться для определения времени
полета до МАР. Во всех случаях, когда использовать определение по времени
использовать нельзя, на схеме делается пометка “определение МАР по времени
не разрешается”.
Если до пролета МАР не был установлен
необходимый визуальный контакт с ориентирами, схема предусматривает немедленное
осуществление ухода на второй круг во избежание столкновения с препятствиями.
Для каждой схемы захода публикуется только одна
схема ухода на второй круг и предполагается, что экипаж ВС будет выполнять
полет по ней. В том случае, когда уход на второй круг начинается до достижения
точки начала ухода на второй круг, предполагается, что экипаж обычно продолжает
полет к точке начала ухода на второй круг, а затем будет следовать
опубликованной схеме с целью предотвращения выхода за пределы защищаемого
воздушного пространства. Допускается пролет над точкой ухода на второй круг
(МАР) на большей абсолютной / относительной высоте, чем это предусмотрено
схемой.
Обычно схемы ухода основываются на номинальном
градиенте набора высоты при уходе на второй круг, равном 2,5%. При разработке
схем может использоваться градиент 2%, если могут быть обеспечены необходимые
наблюдения и меры предосторожности. С одобрения соответствующего полномочного
органа могут использоваться градиенты, составляющие 3, 4 и 5% для тех ВС, чьи
характеристики скороподъемности имеют при этом соответствующие эксплуатационные
преимущества. Если используется градиент, отличный от 2,5%, это будет
указываться на карте захода на посадку по приборам. В дополнение с ОСА/Н для
конкретного применяемого градиента будет также указываться ОСА/Н для
номинального градиента.
Начальный этап ухода на второй круг начинается в
точке МАР и заканчивается в точке, где устанавливается режим набора высоты.
Маневрирование на этом этапе требует от экипажа повышенного внимания, особенно
при переходе к набору высоты и изменении кон-фигурации ВС. Поэтому при
выполнении этих маневров, как правило, невозможно полностью использовать
оборудование наведения, вследствие чего на этом этапе не предусматривается
выполнение маневров.
На промежуточном этапе продолжается набор
высоты, как правило, при полете по прямой. Он продолжается до первой точки, в
кото-рой достигается и может выдерживаться высота пролета над препятствиями в
50 метров (164 фута). Линия пути этого этапа может быть изменена максимум на 15
относительно линии пути начального этапа ухода на второй круг. Предполагается,
что на этом этапе экипаж начинает корректировать полет по линии пути.
Конечный этап начинается в точке, где впервые
достигается и может выдерживаться высота пролета над препятствиями в 50 метров
(164 фута) и продолжается до точки, в которой начинается новый заход на посадку,
полет в зоне ожидания или возобновляется полет по маршруту. На этом этапе может
предписываться выполнение разворотов.
Ширина зоны ухода на второй круг при наличии
радиолокационного контроля может быть расширена по 10 в обе стороны от
оси ВПП. Безопасная высота пролета над препятствиями в зоне ухода
устанавливается в 30 метров (100 футов).
.2 Способы инструментального захода на посадку
Способы инструментального захода на посадку
изложены в документе 8168.
В международной практике наиболее часто применяются
следующие способы инструментального захода на посадку:
Заход с
прямой
(Straight in Approach).
Обратная схема:
стандартный разворот (Procedure Turn);
обратный разворот (Base Turn).
Схема “Ипподром” (Race Track).
Заход по орбите (Arc in Orbit).
Векторение по локатору (Vectoring Approach).
Каждый из этих способов далее будет рассмотрен
отдельно.
Особенности выполнения захода на посадку этими
способами публикуются в полетных документах. Расчет схем захода на посадку
производится с учетом индикаторных скоростей ВС на различных этапах захода.
Выбор способов захода на посадку, а также их выполнение и публикация связаны со
следующими правилами:
Все развороты при заходе на посадку должны
выполняться с креном 25° (в США – 30°)
или с угловой скоростью 3°/сек.
Если на схеме обозначено положение посадочных
устройств, но не обозначены курсы и время полета, нужно пользоваться данными
для нормальной (стандартной) схемы.
Если на схеме не указаны посадочные устройства,
курсы и время полета, заход выполняется по расчету экипажа, но так, чтобы
максимальное удаление ВС от ВПП не превышало 15 морских миль.
Если на схеме обозначены курсы и время полета,
заход на посадку выполняется строго по указанной схеме.
В случаях, когда экипаж ВС сообщает
диспетчерской службе, что схема захода на посадку и порядок ее выполнения на
данном аэродроме ему незнакомы, диспетчерская служба должна сообщить:
Установленную начальную высоту захода на
посадку.
Место начала разворота, обычно в минутах полета
от навигационной точки.
Высоту начала разворота.
Высоту выхода из последнего разворота.
Сведения о посадочной прямой.
Заход с прямой. Основной и самый экономичный
способ захода на посадку. Разрешается при подходе ВС к посадочному курсу под
углом не более 30° и удалении от торца ВПП не более 25
морских миль. При выполнении захода данным способом экипаж обязан строго
выполнять команды диспетчерской службы, особенно в вертикальной плоскости, зная
при этом минимальные безопасные эшелоны и высоты в районе данного аэродрома.
Заход по орбите. Способ заключается в полете по
окружности на определенной дальности по DME, со снижением до высоты не ниже
указанной на схеме (обычно начальная высота выполнения схемы за-хода на посадку
или высота входа в глиссаду), с целью вывода ВС в наивыгоднейшую точку разворота
на прямую приближения с после-дующим полетом по прямой приближения для
выполнения захода на посадку. Точка разворота на прямую приближения, как
правило, маркируется радиалом от радионавигационного средства.
Векторение по локатору. Сущность этого метода заключается
в том, что после пересечения границы или рубежа зоны векторения, экипаж ВС
следует командам диспетчера, который сообщает требуемый курс полета и выводит,
таким образом ВС в зону ±30° от
посадочного курса. После “захвата” сигнала курсового маяка,
векторение прекращается.
Глава 5. Визуальный заход на посадку
Основным методом захода на посадку в
международных аэропортах является инструментальный. Однако не на всех
аэродромах, оборудованных устройствами для инструментального захода на посадку,
имеются схемы захода на посадку по приборам. Особенностью визуального захода на
посадку является то, при выполнении его схемы “коробочка” экипаж
обязан видеть ВПП в процессе всего захода.
Визуальный заход на посадку и полет по
прямоугольному маршруту типа “коробочка” применяется крайне редко.
Термин “заход на посадку по кругу” вообще означает выполнение
визуального полета по кругу над аэродромом перед посадкой.
Заход на посадку по кругу представляет собой
визуальный маневр в полете. Условия полета по кругу каждый раз бывают
различными, поскольку они зависят от таких переменных факторов, как
расположение ВПП, линия пути конечного этапа захода на посадку, скорость ветра
и метеорологические условия. Следовательно, невозможно разработать единую
схему, которая была бы пригодна для выполнения захода на посадку по кругу в
любых условиях.
После установления первоначального визуального
контакта с ориентирами основное допущение заключается в том, что среду ВПП (то
есть порог ВПП или светотехнические средства захода на посадку или другую
маркировку, относящуюся к ВПП) следует непрерывно держать в поле зрения при
полете по кругу на MDA / H. Когда установлен надежный контакт с наземными
ориентирами и экипаж решил совершить визуальный заход на посадку, он обязан
сообщить об этом службе движения. При выполнении полета по кругу разрешается
выполнять наиболее рациональные траектории полета в горизонтальном полете или
со снижением с целью сокращения расстояния и экономии топлива. Если при
установлении визуального контакта с землей доклад службе движения о визуальном
контакте не производился, экипаж обязан выдерживать обязательные траектории.
Для выполнения визуального маневрирования
(визуального полета по кругу) устанавливается зона визуального маневрирования,
обозначаемая на диспетчерском радиолокаторе и ограниченная дугами, проведенными
из центров порогов каждой ВПП. Радиус дуги зависит от посадочной категории ВС,
рекомендуемой скорости ВС для захода на посадку для каждой категории, скорости
ветра (учитывается скорость 46 км/ч или 25 узлов) и радиуса разворота (со
средним креном 20° или угловой скоростью разворота 3°/сек)
независимо от величины угла разворота). Пример расчета радиуса зоны визуального
маневрирования представлен в таблице:
Таблица 6. Расчет радиуса визуального маневрирования
|
Категория |
A |
B |
C |
D |
E |
|
Рекомендуемая |
185 |
250 |
335 |
380 |
445 |
|
Истинная |
241 |
310 |
404 |
448 |
516 |
|
r |
1,28 |
2,08 |
3,46 |
4,31 |
5,76 |
|
n |
0,56 |
0,74 |
0,93 |
1,11 |
1,30 |
|
R |
3,12 |
4,90 |
7,85 |
9,79 |
12,82 |
После установления зоны визуального
маневрирования (полета по кругу) определяется относительная / абсолютная высота
пролета препятствий (ОСА/Н) для каждой категории ВС:
Таблица 7. относительная / абсолютная высота
пролета препятствий (ОСА/Н) по категории ВС
|
Категория |
Запас |
Минимальная |
Минимальная |
|
A |
90 |
120 |
1,9 |
|
B |
90 |
150 |
2,8 |
|
C |
120 |
180 |
3,7 |
|
D |
120 |
210 |
4,5 |
|
E |
150 |
240 |
6,5 |
Рисунок 24. Зона визуального маневрирования
В тех случаях, когда с учетом эксплуатационных
соображений в соответствии с Приложением 6 к ОСА/Н прибавляется дополнительный
запас, указывается MDA/H. Снижение до высоты, меньшей чем MDA/H, не
производится до тех пор, пока:
Не будет установлен и поддерживаться визуальный
контакт с ориентирами.
Экипаж не увидит порога ВПП и,
Не будет выдерживаться необходимый запас высоты
над препятствиями и ВС не займет соответствующего положения для выполнения
посадки.
Примечание. Данная схема не обеспечивает защиту
от препятствий, когда ВС находится на высоте меньшей, чем MDA/H.
Если при полете по кругу для выполнения посадки
по схеме захода на посадку по приборам теряется визуальный контакт с
ориентирами, следует использовать такую схему ухода на второй круг, которая
указана для данной конкретной схемы захода на посадку. Ожидается, что экипаж
выполнит разворот с начальным набором высоты в направлении ВПП намеченной
посадки и пролетит над аэропортом, где он выведет ВС на набор высоты по линии
пути ухода на второй круг. Поскольку круговой маневр может выполняться более
чем в данном направлении, потребуются различные схемы для выдерживания
предписываемого курса ухода на второй круг, в зависимости от положения ВС в
момент потери визуального контакта с ориентирами.
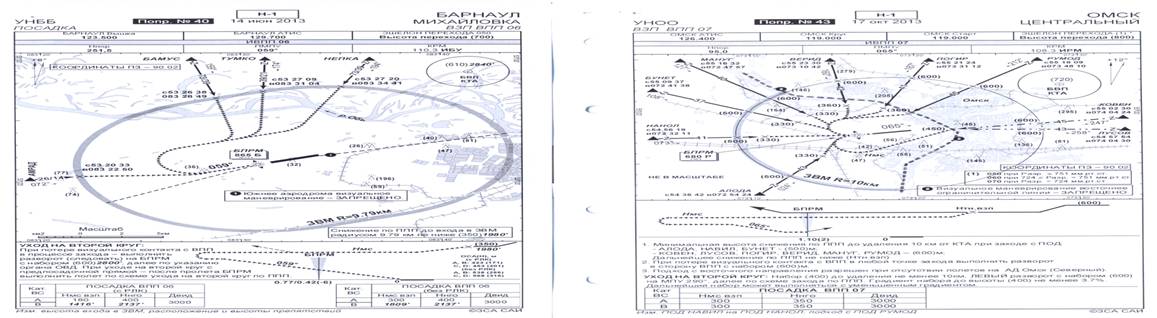
Рисунок 25. Схема посадки ПВП аэродрома Барнаул
(Михайловка)
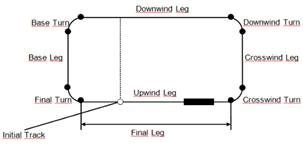
Рисунок 26. Схема визуального захода на посадку
.1 Характерные участки при выполнении захода на
посадку
Во всех способах захода на посадку, особенно при
выполнении визуального захода, различают следующие элементы (см. рисунок
27):Circutкруг полетов;Trackпуть начального подхода;Legпрямая полета против
ветра;Legпрямая полета поперек ветра;Turnразворот поперек ветра;Legпрямая
полета по ветру;Ternразворот по ветру;Legбазовая прямая;Turnбазовый разворот
(разворот на базовую прямую);Legпрямая окончательного захода;Turnпоследний
разворот (разворот на посадочную прямую.
.2 Запас высоты над препятствиями
При разработке каждой отдельной схемы захода на
посадку рассчитывается абсолютная / относительная высота захода на посадку (ОСА/Н),
которая указывается на карте захода на посадку по приборам. Абсолютной /
относительной высотой пролета препятствий (ОСА/Н) является:
При выполнении точного захода на посадку
наименьшая абсолютная высота (ОСА) или в других случаях наименьшая относительная
высота над превышением порога (ОСН), на которой должен начаться уход на второй
круг с тем, чтобы гарантировать соблюдение соответствующих критериев пролета
препятствий.
При выполнении неточного захода на посадку
наименьшая абсолютная / относительная высота (ОСА/Н), ниже которой ВС не может
снижаться, не нарушив соответствующих критериев пролета препятствий.
Эксплуатационные минимумы рассчитываются путем
добавления влияния ряда эксплуатационных факторов к ОСА/Н с тем, чтобы получить
значение абсолютной / относительной высоты принятия решения DA/H в случае
точного захода на посадку, или минимальной абсолютной/ относительной высоты
снижения MDA/H в случае неточного захода на посадку.
5.3 Градиент набора и снижения
На картах SID и STAR, а также в указаниях службы
воздушного движения дается градиент набора (снижения) (Climb / Descent
Gradient). Он может быть выражен:
В приросте высоты на единицу расстояния,
например 250 footper NM (футов в морскую милю).
В процентном отношении, например: Climb Gradient
4% означает набор с приростом высоты 40 метров на один километр расстояния.
Для перевода градиента в процентах в значение
вертикальной скорости набора (снижения) можно использовать соответствующий
график, переводную таблицу, или умножить поступательную скорость на градиент.
На схемах SID и STAR для перевода даются
таблицы, в которых градиент набора (снижения) перерассчитывается по значению
поступательной скорости в вертикальную скорость, выраженную в футах в минуту.
Глава 6. Заход на посадку с использованием различных
посадочных систем
Заход на посадку в международных аэропортах
может выполняться по различным посадочным устройствам и системам:
Радиомаячным системам типа ILS.
Радиолокационным системам типа GCA.
Направленным радиомаякам типа VOR.
Приводным радиостанциям – NDB.
Радиопеленгаторам.
Все эти устройства могут применяться совместно с
дальномерным оборудованием DME и светотехническим оборудованием аэродрома.
Точность выдерживания направления при заходе на посадку с использованием
различных посадочных устройств составляет:
(ILS ± 2,4°);
(VOR ± 5,2°);
(NDB ± 6,9°).
Для создания параметров курса и глиссады
наибольшее распространение в настоящее время получили радиомаячные (РМС) и
радиолокационные (РСП) системы посадки.
РМС являются основными системами выполнения
захода на посадку, так как, обладая высокой точностью и устойчивостью работы,
обеспечивают непосредственную индикацию положений линий курса и глиссады
снижения на приборах ВС и позволяют автоматизировать заход на посадку.
РСП являются дополнительными системами захода на
посадку и используются для контроля за ВС, выполняющими заход на посадку,
захода на посадку ВС, не оборудованных ILS, и как резервные системы на случай
отказа других посадочных устройств. На некоторых аэродромах РСП являются
основными системами захода на посадку.
6.1 Заход на посадку по системе ILS
Согласно Стандартам ИКАО система ILS имеет
следующую классификацию по категориям (в зависимости от технических
возможностей), которые используются при определении посадочных минимумов при заходе
на посадку по системе ILS:
ИЛС – категория I:не более 200 футов (60м);не
более 2400 футов (800м);не более 1800 футов (550м);
ИЛС – категория II (требуется специальное
разрешение):не менее 200 футов (60м), но не более 100 футов (30м);не более 1200
футов (350м);
ИЛС – категория III (требуется специальное
разрешение):менее 100 футов (30м) или без DH;не менее чем 700 футов
(200м);менее 50 футов (15м) или без DH;менее чем 700 футов (200м), но не более
150 ф. (50м);и RVR не требуются.
Кроме того существует классификация FAA:
ИЛС – категория I:не менее 200 футов (60м);не
менее 1800 футов (550м);
ИЛС – категория II (требуется специальное
разрешение):не менее 100 футов (30м);не менее 1200 футов (350м);
ИЛС – категория III (требуется специальное
разрешение):не требуется;не менее 700 футов (200м);не требуется;не менее 150
футов (50м);и RVR не требуются.
Заход на посадку осуществляется следующим
способом.
Первоначальный выход в район аэродрома и
построение маневра захода на посадку осуществляются , как правило, по другим
навигационным средствам.
Схема захода на посадку по ILS строится так,
чтобы расстояние от точки выхода ВС на линию посадочного курса до точки входа в
глиссаду (FAF – ТВГ) было достаточным для стабилизации скорости и установления
соответствующей полетной конфигурации ВС. Вся схема захода на посадку по
категорированной системе должна быть приспособлена к выполнению
автоматизированного захода на посадку. Максимальная длина этапа промежуточного
этапа захода на посадку не превышает 25 морских миль и полностью находится в
зоне действия КРМ. Оптимальная длина этапа промежуточного захода на посадку
составляет 5 морских миль.
Минимальная длина этапа промежуточного захода на
посадку зависит от угла подхода к линии посадочного курса и не должна быть
менее значений, приведенных в таблице:
Таблица 8. Углы и расстояния подхода
|
Угол |
Минимальное |
|
|
градусы |
км |
мили |
|
0 |
2,8 |
1,5 |
|
16 |
3,7 |
2,0 |
|
31 |
4,6 |
2,5 |
|
61 |
5,5 |
3,0 |
Примечания:
Приведенные минимальные величины могут быть
использованы только при ограниченности воздушного пространства.
При автоматическом пилотировании желательно,
чтобы угол подхода к линии посадочного курса не превышал 30°.
Минимальные безопасные высоты при заходе на
посадку по ILS устанавливаются следующим образом:
При выполнении схемы захода – 300 метров (1000
футов).
От ТВГ до ДРМ – 150 метров (500 футов).
От ДРМ до СРМ – 60 метров (200 футов).
От СРМ до МАР – 30 метров (100 футов).
При использовании системы ILS можно выполнить
заход по кратчайшему пути в тех случаях, когда:
Схема захода на посадку не имеет Procedure Turn.
На схеме захода на посадку имеется надпись
“NOPT”.
Используется метод “Векторение по
локатору”.
.2 Заход на посадку по VOR или NDB
Первоначальный выход на VOR (NDB) осуществляется
в соответствии с правилами полета по маршруту. Минимальные безопасные высоты
при заходе на посадку по VOR (NDB) приведены в таблице:
Таблица 9. Минимальные безопасные высоты при
заходе на посадку по VOR (NDB)
|
Удаление |
Минимальные |
|||
|
от |
до |
после |
||
|
мили |
метры |
футы |
метры |
футы |
|
£ 4 |
90 |
300 |
60 |
200 |
|
4 |
150 |
500 |
90 |
300 |
|
6 |
150 |
500 |
120 |
400 |
|
8 |
150 |
500 |
150 |
500 |
(NDB), используемый для захода на посадку (см.
рисунок 27), может находиться не на продолжении осевой линии ВПП. Угол между
линией конечного этапа захода на посадку и продолжением осевой линии ВПП не
должен превышать 30°, а расстояние между торцом ВПП и
точкой, в которой линия пути конечного этапа захода на посадку пересекает
продолжение осевой линии ВПП, должно быть не менее 900 метров (3000 футов).
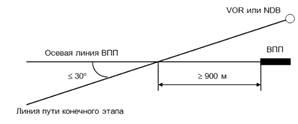
Рисунок 27. Расположение VOR (NDB) относительно
ВПП при
заходе на посадку по VOR (NDB)
В этих случаях при заходе на посадку требуется
доворот в створ ВПП. Минимальные расстояния до торца ВПП, на которых должен
быть осуществлен выход в створ ВПП, приведены в таблице:
Таблица 10. Минимальные расстояния до торца ВПП
по категориям ВС
|
Категории |
Углы |
|||||
|
воздушных |
10° |
20° |
30° |
|||
|
судов |
км |
мили |
км |
мили |
км |
мили |
|
A |
1,9 |
1,0 |
2,8 |
1,5 |
3,7 |
2,0 |
|
B |
2,8 |
1,5 |
3,7 |
2,0 |
4,6 |
2,5 |
|
C |
3,7 |
2,0 |
4,6 |
2,5 |
5,6 |
3,0 |
|
D |
4,6 |
2,5 |
5,6 |
3,0 |
6,5 |
3,5 |
|
E |
5,6 |
3,0 |
6,5 |
3,5 |
7,4 |
4,0 |
В случае, когда основное посадочное средство
аэродрома расположено не на линии посадочного курса, в заголовке схемы захода
на посадку рядом с указанием процедуры захода на посадку может быть указан
суффикс, например, A, B, C… (например: VOR-B, LOC (BACK CRS)-A и так далее).
Данный суффикс указывает на то, что для данного средства захода на посадку
взлетный и посадочный минимумы не установлены.
.3 Заход на посадку по двум NDB
Такая процедура выполняется при наличии на борту
ВС двух АРК, если NDB расположены на расстоянии не более 10 морских миль друг
от друга.
Выполнение захода на посадку не отличается от
выполнения захода на посадку по ОСП в России.
Профиль снижения представляет собой ломаную
глиссаду снижения по принципу:
От последнего разворота до ДРМ – не ниже
установленной высоты пролета ДРМ.
От ДРМ до СРМ – не ниже установленной высоты
пролета СРМ.
От СРМ до БРМ – не ниже установленной высоты
пролета БРМ или не ниже высоты принятия решения.
Минимальные безопасные высоты при заходе на
посадку по двум NDB устанавливаются:
При выполнении схемы захода – 300 метров (1000
футов).
От ТВГ до ДПРМ – 150 метров (500 футов).
От ДПРМ до БПРМ – 60 метров (200 футов).
От БПРМ до МАР – 30 метров (100 футов).
.4 Заход на посадку по GCA
Начальный и промежуточный этапы захода на
посадку по GCA включают участки маневра захода на посадку с момента начала
радиолокационного контроля для вывода ВС на конечный этап захода на посадку до
момента, когда:
ВС готово начать заход по ОРЛ (Director).
Управление передано диспетчеру посадки
(Precision).
ВС выполняет полет на конечном этапе по
радионавигационным средствам.
Экипаж ВС сообщил о возможности визуального
захода на посадку.
Примечание. Director управляет полетом до
посадочной прямой (при наличии посадочного радиолокатора) или до посадки, а
Precision управляет полетом на посадочной прямой.
Заход на посадку по другим радионавигационным
средствам должен контролироваться по GCA (ПРЛ):
Во всех случаях, когда метеорологические условия
хуже минимума, установленного органом воздушного движения.
По запросу экипажа.
По требованию диспетчера соответствующего органа
воздушного движения.
В этих случаях экипаж должен быть
проинформирован о контроле по ПРЛ. До начала конечного этапа захода на посадку
диспетчер обязан не менее одного раза информировать экипаж о его
местонахождении.
Без промедления диспетчер должен передать на
борт информацию о погоде, об условиях на аэродроме (включая и состояние ВПП) и
данные о порядке установки высотомеров.
Диспетчер может давать экипажу указания о
выдерживании скорости полета для выдерживания интервала между ВС или для
обеспечения радиолокационного контроля, а также команду на выпуск шасси.
Перед началом конечного этапа захода на посадку
диспетчер должен сообщить экипажу ВС:
Номер используемой ВПП.
Высоту принятия решения (DH).
Номинальный угол наклона глиссады или Vy (по
запросу).
Порядок действий при отказе радиосвязи в
процессе захода на посадку (если этот порядок не указан в документах
аэронавигационной информации (AIP).
Если радиолокационное обеспечение захода на
посадку по каким – либо причинам не может быть продолжено, диспетчер должен
немедленно сообщить об этом экипажу и, кроме того:
Если ВС еще не вышло на конечный этап, передать
ему разрешение выйти на соответствующее радионавигационное средство для
выполнения повторного захода на посадку.
Если ВС вышло на конечный этап, передать ему
разрешение продолжить заход с использованием других радионавигационных средств,
когда экипаж сообщит о готовности завершить заход самостоятельно.
Команды диспетчера должны содержать:
Курс полета.
Указание на начало снижения (при подходе к глиссаде).
Расстояние до начала ВПП.
Указание об отклонении от глиссады и поправки к
Vy.
Разрешение на посадку (расстояние до ВПП в
момент завершения захода).
При неудавшемся заходе – порядок дальнейших
действий.
Допустимые отклонения от траектории снижения
приведены в таблице:
Таблица 11. Допустимые отклонения от траектории
снижения
|
Удаление |
Вправо |
Вверх |
||
|
миль |
метры |
футы |
метры |
футы |
|
0,5 |
30 |
100 |
15 |
50 |
|
1 |
60 |
200 |
15 |
50 |
|
1,5 |
90 |
300 |
23 |
75 |
|
2 |
120 |
400 |
30 |
100 |
|
3 |
180 |
600 |
45 |
150 |
|
4 |
240 |
800 |
60 |
200 |
|
5 |
300 |
1000 |
75 |
250 |
|
6 |
360 |
1200 |
90 |
300 |
Экипажу через регулярные промежутки времени
сообщаются данные о положении ВС относительно траектории снижения, о подходе к
точке входа в глиссаду, о начале снижения и о достижении высоты принятия
решения (DH).
Разрешение на посадку должно быть передано на
борт ВС до того, как ВС выйдет в точку, расположенную в двух милях от точки
приземления.
Контроль захода на посадку прекращается, когда
ВС выйдет в точку пересечения глиссады с минимальной высотой пролета над
препятствиями. Тем не менее информация передается на борт самолета до тех пор,
пока ВС не достигнет порога ВПП.
Обеспечение информацией может быть прекращено,
когда экипаж ВС доложит о визуальном наблюдении ВПП или огней приближения,
однако диспетчер должен быть постоянно готов взять на себя контроль захода на
посадку по запросу экипажа.
Диспетчер может дать команду об уходе на второй
круг:
Если ВС находится в опасном положении на
конечном этапе захода на посадку.
Если нет возможности дать разрешение на посадку
(занята ВПП).
Диспетчер может указать на целесообразность
ухода на второй круг:
Если ВС находится в таком положении, когда не
гарантируется успешное завершение захода на посадку.
Если ВС не просматривается на экране
радиолокатора на удалении 2 миль от точки приземления.
Если есть сомнения относительно местонахождения
ВС на любом участке конечного этапа захода на посадку.
Во всех этих случаях причины, определяющие
указания диспетчера, должны быть сообщены экипажу.
После неудавшегося захода диспетчер должен
осуществить повторный завод ВС на посадку.
Глава 7. Анализ авиационных происшествий
Была изучена статистика авиационных
происшествий, связанных с некачественной подготовкой к полетам за период с
2007г. по 2014г. их количество составило 22 авиационных происшествия и 13
авиационных катастроф. Информация о статистике происшествий проанализирована на
сайте Межгосударственного авиационного комитета (МАК).
Для примера взято одно расследование из 35
произошедших происшествий за этот период.
.07.2012
Комиссия Межгосударственного авиационного
комитета завершила расследование авиационного происшествия с самолетом
BAe-125-800B RA-02807 ЗАО «С-Эйр» в районе аэродрома Минск-2 Республики
Беларусь 26.10.09.
Причиной катастрофы самолета BAe-125-800B
RA-02807 при выполнении захода на посадку по радиомаячной системе (ILS), ночью,
в метеоусловиях, соответствующих CAT I ИКАО, явилось непринятие экипажем
своевременного решения по уходу на второй круг или запасной аэродром, снижение
вне видимости наземных ориентиров ниже высоты принятия решения с целью перехода
на визуальный полет, а также отсутствие должной реакции и требуемых действий
при неоднократном срабатывании сигнализации системы раннего предупреждения
приближения земли (TAWS), что привело к столкновению самолета с препятствиями
(лесной массив) и землей в управляемом полете (CFIT), его разрушению и гибели
находившихся на борту людей.
Способствующими факторами явились:
недостатки в переучивании на тип и в подготовке
экипажа к полетам, особенно в части использования автоматических и директорных
режимов полета;
ошибочные действия командира экипажа, приведшие
к выполнению захода на посадку с неправильно установленной частотой ILS на
левом комплекте;
недостаточный уровень подготовки командира ВС к
заходам на посадку в метеоусловиях, соответствующих CAT I ИКАО. Значения
метеоусловий, при которых подтверждался метеоминимум, в большинстве случаев
были фальсифицированы;
неудовлетворительное взаимодействие в экипаже и
управление ресурсами (CRM) со стороны КВС;
неудовлетворительный контроль за уровнем
подготовки экипажа со стороны руководства авиакомпании и недостаточный уровень
организации летной работы в авиакомпании, выявленный комиссией Росавиации только
после авиационного происшествия;
психологические особенности пилотов, неучтенные
при формировании экипажа и, возможно, снижение работоспособности командира ВС в
стрессовой ситуации из-за наличия у него хронической ишемической болезни сердца
с выраженным коронаросклерозом, которая не была выявлена при прохождении ВЛЭК.
По результатам расследования разработаны
рекомендации по повышению безопасности полетов.
Заключение
. Была подобрана и изучена основная информация,
касающаяся выполнения захода на посадку, которая включает в себя:
этапы полета ВС, посадка ВС;
способы захода на посадку (способы, используемое
оборудование, точность, использование АНИ, особенности подготовки и выполнения,
порядок расчета экипажем).
. Изучена статистика авиационных происшествий,
связанная с некачественной подготовкой к полету и приведен пример авиационной
катастрофы
Практические рекомендации
Руководству авиакомпаний необходимо повысить
качество подготовки экипажей к полетам и усилить контроль над соблюдением
установленных правил при подготовке экипажей к полетам, в части касающейся
выполнения захода на посадку. Изучения схем заходов на посадку, порядку
выполнения необходимых навигационных расчетов и соблюдения их в процессе
выполнения полета.
Экипажам ВС необходимо изучать нормативные
документы настоящих авиационных правил, а также, знать порядок действий экипажа
в особых и аварийных случаях полета.
Список литературы
1.
М. А. Черный, В.И. Кораблин «Воздушная навигация»;
.
Москва «Транспорт» 2013г. «Воздушная навигация»;
.
Минобороны «Применение геотехнических средств в воздушной навигации»;
.
ФАП приказ Минтранса РФ № 128 от 31.07.2012 г.;
.
Минтранс РФ Ю.Н. Сарайский, И.И. Алешков «Аэронавигация»;
.
Политехника Г.В. Коваленко «Летная эксплуатация»;
Сегодня в рамках очередного рассказа о “таинствах” летной работы я расскажу о том, как пилоты умудряются не заблудиться в бескрайнем пятом океане и находят путь из точки А в точку Б.
Самолетовождение (или же Воздушная Навигация) – предмет, который является одной из базовых дисциплин любого начинающего пилота. Конечно же, я не хочу загружать читателя формулами расчета МК, МПР, УС, ЗМПУ и ключами великого советского компьютера НЛ-10М (использованию которого до сих пор учат в брендовых летных училищах нашей страны нашей страны), но расскажу об общих принципах.
Итак, поехали!
Точнее, полетели.
* * *
В преддверии повествования хочу сразу сказать, что самолеты обычно не летают “как попало” – то есть, строго по прямой. Для выполнения полетов существуют “маршруты”, так называемые “воздушные трассы”, которые представляют собой ломаные линии, вершинами которых являются ППМ – поворотные пункты маршрута. Конечно же, современные методы навигации вполне способны справится с задачей выполнить полет из Москвы в Владивосток без единого ППМ посередине, однако, наличие “изогнутых” трасс обусловлено множеством факторов, например – наличие (отсутствие) по пути следования средств для базовой радионавигации, аэродромов на случай вынужденной посадки, запретных для полетов зон и т.п.
Золотая эра авиации
Визуальное ориентирование
Самый базовый метод воздушной навигации это, безусловно, визуальный.
“Куда гляжу, туда и лечу”.
Он до сих пор очень широко развит в авиации общего назначения, которые сплошь и рядом летают по правилам визуальных полетов. Суть, я думаю, понятна – пилот ориентируется на основании видимости наземных объектов, определяя ППМ и правильность пути.
Кстати, метод, хоть и базовый, но совсем не тривиальный, и требует определенного опыта и хороших навыков. Пилот имеет карты довольно крупного масштаба (1 см = 5 км или даже крупнее) на которых довольно подробно нанесены объекты – леса, реки, ЛЭП, вышки, пруды, возвышенности, деревни и поселки, которые нарисованы с сохранением реальных очертаний.
На этой карте пилот карандашом чертит (прокладывает) маршрут(ы) и в полете по мере движения самолета по расчетному курсу “ведет пальчиком” по карте, заранее ожидая увидеть тот или иной ориентир, который отмечен на карте, либо, если отвлекся, восстанавливает ориентировку – сравнивая конфигурацию видимых пролетаемых объектов на местности с тем, что содержится в карте.
Стоит “расслабиться” или “зазеваться” – и у не очень опытного пилота (или еще курсанта) возникают определенные проблемы. Например, речки на картах выглядят синими “змейками”, а в жизни они (в наших краях) зачастую скрыты за кустами и деревьями, растущими по берегу. То есть, воды с воздуха не видно, а самих речушек-змеек довольно много. То же самое и с деревеньками – их бывает много и это иногда путает пилота, т.к. они в целом довольно похожи между собой.
Визуальные полет по незнакомому маршруту является довольно непростой задачей, если не иметь четкого навыка работы с картой и местностью.
С другой стороны, это очень интересно – летать на небольшой высоте на тихоходном самолетике, чувствовать все воздушные потоки, т.к. органы управления связаны с рулевыми поверхностями без каких-либо новомодных компьютеров, и любоваться красотами, простирающимися вокруг тебя! Наверное, это и есть самая настоящая “романтика полета”… полеты на большом высотном и скоростном самолете все же вносят “пластмассовость” в ощущения и романтика уже другая.
Для того, чтобы облегчить себе жизнь, при визуальном ориентировании пилот ведет контроль пути по времени и расстоянию. Начинается он на еще предполетной подготовке – пилот быстренько делает штурманский расчет маршрута – посредством НЛ-10М (либо иных инструментов) рассчитывает путевую скорость самолета и время, которое он затратит на пролет каждого участка маршрута, используя данные метеорологов о ветре. Кроме этого, он предварительно рассчитывает курсы на каждом участке с учетом этого же ветра.
Как известно, воздушные потоки пытаются снести самолет с линии пути, которая невидимо пролегает по земле, поэтому пилоту приходится вносить в курс поправку, в результате чего самолет относительно земли летит под неким углом, называемым “углом сноса” – это угол между продольной осью самолета и фактической линией пути.
После того, как пилот поднимает свой самолет в воздух и выходит на первую известную точку на маршруте, он “кладет” самолет на расчетный курс и включает секундомер. Далее по специальной методике (используя известное расстояние между двумя объектами и затраченное для его пролета время) очень быстро определяет фактическую путевую скорость и, методом подбора, курс, необходимый для того, чтобы траектория полета совпадала с заданной. И уже по этим данным, опять же, благодаря великой и могучей линейке НЛ-10М, определяет фактические скорость и направление ветра и вносит коррективы в штурманский расчет.
Если применять в комплексе визуальное ориентирование (уже получив необходимый опыт, конечно же) и контроль пути по времени, то потеряться в ясном небе довольно проблематично.
Однако, что делать, если вокруг только облачность и ничего более?
Радионавигация
Проблемой “всепогодных полетов” человечество озадачилось практически сразу же, как изобрело способ перемещаться по воздуху. Да, бесспорно, это очень чудесно – летать и любоваться осенними пейзажами в солнечный день, однако, что делать, если небо нахмурилось, и туманы заволокли землю, закрыв все ориентиры?
Ученые умы, почесав головы, догадались использовать для этих целей радиоволны!
Тут тоже все довольно просто. Поставив излучатель (радиомаяк или так называемый “привод”) и, поколдовав над устройством прибора, можно добиться так, чтобы его стрелочка показывала направление на маяк относительно “носа самолета” или какого-то иного “нуля”, задаваемого пилотом, выдавая при этом курсовой угол радиостанции (КУР). На приборе АРК, показанном ниже, КУР равен примерно 60 градусам, то есть нужный нам маяк находится справа от нас под углом 60 градусов.:
Это не всегда удобно, т.к. “справа под 60” еще не означает, что надо взять курс 060 градусов ля того, чтобы лететь на маяк (ведь совсем необязательно при этом самолет летит строго на север). Поэтому приходится производить некоторые расчеты, чтобы определить, какой курс требуется для выхода… ну или “тупо” крутить вправо, пока стрелка не совпадет с нулем прибора.
В более продвинутых приборах стрелки показывают направление относительно магнитного севера, показывая магнитные пеленги радиостанции (МПР) или самолета (МПС). Нетрудно догадаться, что МПР-МПС=180 град. Шкала вращается относительно самолета при его эволюциях, при этом 0 шкалы всегда направлен на магнитный север.
На картинке выше самолет летит на восток с курсом 080 градусов. На приборе две стрелки, каждая из которых настроена на свой радиомаяк. “Наконечники” стрелок показывают МПР, противоположные – МПС. Если пилот, к примеру, захочет полететь на радиомаяк, на который указывает конец желтой стрелки, он задаст самолету курс примерно 160 градусов с учетом коррекции на угол сноса.
Опять-таки, даже при полетах с помощью радионавигации пилот использует карту для контроля маршрута. Казалось бы, можно тупо лететь на радиостанцию, внеся поправку на угол сноса, а после того, как стрелка “провернется” (т.е., самолет пролетит маяк) – повернуть на новый курс и снова спать…
Не тут-то было.
Во-первых, даже в золотые годы радионавигации далеко не все маршруты были покрыты сетью радиомаяков. Было очень много пустых зон, внутри которых самолет летел по расчетному курсу с включенным секундомером.
Во-вторых, это только в авиасимуляторах стрелки ведут себя “честно” и показывают строго на привод. В жизни они любят колебаться, словно барышня на первом свидании или даже “танцевать”, как она же на дискотеке. А дальность действия маяков довольно ограничена.
Так что, необходимость постоянно знать место самолета, фактическое значение ветра и, соответственно, путевую скорость и поправки в курс никуда не исчезла. Более того, необходимость контроля даже выросла в сравнении с исключительно визуальными полетами, т.к. в последнем случае “читерства” в виду отсутствия мешающей облачности все же больше.
* * *
Так вот, после изобретения радионавигации, человечество изобрело и методики определения места самолета с ее помощью. Например, если у тебя есть два радиомаяка поблизости (один, например, впереди, а другой сбоку), можно проложить обратные пеленги и по месту их пересечения определить точку самолета на карте. Через 5-10 минут еще раз проложить пеленги и по пройденному расстоянию определить путевую скорость.
Бинго!
Угол сноса определяется так же просто. Если мы взяли расчетный курс и вышли строго на стрелку, но ее постоянно сносит “вправо”, то есть, нам необходимо подворачивать влево, чтобы стрелка вернулась и показывала нужный нам курс (который, напомню, при наличии бокового ветра никогда НЕ совпадает с фактическим), то рано или поздно мы находим такой курс, при котором стрелка +- постоянно (учитывая колебания) показывает куда надо. Соответственно, разница между заданным и фактическим курсом и будет нашим углом сноса.
А далее… НЛ-10М в руки, находим значения скорости и направления ветра и производим коррекцию во все остальные предварительные расчеты.
* * *
Простая радионавигация – безумно интересный способ нахождения себя в пространстве, но тратящий много внимания.
И нервов. Разве ж тут можно поспать, если все время, как заведенный, счисляешь путь?
Да, я забыл сказать, что как раз для того, чтобы пилоты могли дрыхнуть, им в помощь придумали наиболее совершенный инструмент – штурмана. Ообучили серьезных дядек методам навигации, сунули им в руку карты, хронометр и НЛ-10М и засунули в самолеты. И все было замечательно, покуда коммерсанты не настояли на изобретении модерновых навигационных систем – все для того, чтобы уменьшить количество человек в кабине и снизить издержки на зарплаты.
Но о них позже. Пока что продолжим тему золотой эры авиации.
Учитывая мольбы летчиков и штурманов, умы придумали еще и способы определения удаления. На земле соорудили специальные маяки (VOR/DME) и создали самолетное оборудование. Все это вместе, взаимодействуя друг с другом, может выдавать как направление на станцию, так и удаление самолета от нее.
Пилот всю эту красоту может наблюдать на приборе:
Имея такие маяки на маршруте (или хотя бы сбоку) навигация значительно упрощается. Более того, некоторые виды маяков можно использовать для автоматического полета “по лучу”, если они являются ППМ, а автопилот самолета имеет соответствующую функциональность.
Точность навигации значительно повысилась, заодно и регулярность и интенсивность полетов. Однако, прогресс не стоял на месте, и пытливые умы придумали новые способы определения положения самолета – методом вычисления координат!
Замечу, что системы VOR/DME – изобретение буржуинское. В СССР использовали нечто похожее, имевшее название РСБН – радиотехнические системы ближней навигации. И даже РСДН – дальней.
Современная эпоха
Инерциальные системы
Поначалу приборы, которые измеряли положение самолета в пространства в координатах (!!) с помощью тонко настроенной системы акселерометров (датчиков, измеряющих ускорения, возникающие при эволюциях самолета) были весьма и весьма несовершенны. Координаты, измеренные ими, быстро “расползались”, не очень-то помогая пилотам ориентироваться в пространстве, что не избавляло пилотов от необходимости постоянно контролировать полет “дедовскими” методами.
Конечно же, с течением времени прогресс дошел до такой степени, что “уход” инерциалок стал очень и очень небольшим, однако, для полного пилотского счастья (т.е., максимальной ленивости) этого было все еще недостаточно.
Поразмыслив, гении придумали специальные системы управления полетом (FMS – flight management system), которые принимают данные о положении самолета из различных источников, сравнивают их между собой по хитрой логике и в результате определяют координаты самолета, которые и используются в навигации.
Кроме инерциальных систем источником координат могут служить… да-да, данные от радионавигации! Если настроиться на маяки, позволяющие узнать расстояние от них до самолета (DME), то, зная координаты этих маяков, система FMS находит точку пересечения дуг дальностей и рассчитывает координаты. Более того, с некоторым ухудшением точности система может посчитать координаты даже по одному маяку, зная направление на него и дальность.
Замечу, что это технологии 80 х – 90 х годов прошлого века. И, увы, технологии эти получили распространение основном на диком Западе. В нашей стране, самый массовый лайнер тех лет – советский лайнер, Ту-154, считать координаты не умел (уточню для вредин – кроме поздних единичных модификаций с кривым “Жасмином” и иже с ним).
Да и вообще, экипажи Ту-154 героически определяли свое место в пространстве благодаря очень занятным навигационным решениям в виде системы НВУ-Б3 и навигационного планшета. Не iPADа, а нормального планшета, в который заправлялась целлулоидная карта полета и двигалась, получая данные от НВУ-Б3, показывая, где, по ее мнению, находится самолет.
Система НВУ-Б3 могла корректироваться по пеленгам и удалениям от РСБН. А управление НВУ-Б3 можно смело счесть вершиной штурманского мастерства!
С появлением микропроцессоров прогресс было уже не остановить. Наконец, стало возможным забивать весь маршрут в память бортового компьютера (являющего сердцем FMS), который выводит на специальном дисплее красивую картинку с линиями, обозначающими путь самолета. А раз появились дисплеи, то на одной картинке сразу совместили много полезной информации – маршрут, ППМ, ограничения (если есть – по скорости и/или высоте) на ППМ, расчетное время пролета ППМ, данные от радара и о рельефе, расположение других самолетов и пр и пр и пр.
Летать сразу стало намного НАМНОГО удобнее.
И от штурманов поспешили избавиться.
Более того, были разработаны правила зональной навигации, которые при наличии соответствующего оборудования на земле и/или воздушном судне позволяют диспетчеру отправлять борты по любым прямым траекториям, а необязательно следовать по изогнутым линиям с ППМ с радиосредствами. Полеты стали “менее кривыми”, что позволило увеличить интенсивность использования воздушного пространства…
…Везде в мире, кроме как в России (ну и в Китае с Монголией), конечно. Увы, в небе нашей страны до сих пор большинство диспетчеров боится разрешить экипажу “спрямление маршрута” по независящим от них причинам.
Хотя контроль пути по средствам радионавигации (для маршрутов без применения зональной навигации) еще никто не отменил, фактически количество маяков на маршрутах стало стремительно убывать. И, если во всем мире это было обосновано повсеместным внедрением маршрутов зональной навигации, то в России, конечно же, просто поснимали маяки, оставив маршруты “как бы обычными”. Правда, в последние годы наметилось увеличение количества VOR/DME, что не может не вызывать умиления – во всем мире от них избавляются, так как это пройденный этап, а у нас (наконец-то!) начали ставить.
Спутниковая навигация
Заметьте, я еще ни слова не сказал о спутниковой навигации.
А сейчас скажу.
В 90-х годах, как рухнул “занавес”, наши экипажи распробовали-таки преимущество космических технологий. Правдами-неправдами авиапредприятия (а то и индивидуумы) закупали разные “гарминки” (от “GARMIN”) и в экстазе летали точно по трассам, несмотря на грозные предупреждения “не использовать в качестве основного средства навигации”.
Использовали-использовали. Даже линейку НЛ-10М иной раз забывали в полет брать!
Правда, вопрос об использовании такого вот “дополнительного оборудования” в коммерческой авиации, скажем так, весьма скользкий. Но об этом не задумывались. Удобство решало все!
Были они жутко тормозными, теряли спутники в самый неподходящий момент… но, тем не менее, выручили не один экипаж в годы постсоветской анархии, когда порочная практика выполнения заходов ниже минимума стала де факто нормой.
Но и до греха доводили.
Мне довелось однажды, очень давно, вступить в спор с командиром (я был еще молодым вторым пилотом), который хотел лететь по GPS-ке, в то время, когда “стрелочки” показывали несколько другое направление. Я настоял на своем и мы благополучно приземлились в Челябинске.
А его гарминка ничтоже сумняшеся после посадки показывала, что мы находимся примерно в 5 км южнее, но (с ее точки зрения) в том же аэропорту.
В 90-х годах ОКБ “Туполева” сделала то, чего от них никто не ждал – умудрились пойти навстречу мольбам эксплуатантов!
Это было настолько знаменательным прорывом, что тогдашний Президент Борис Ельцин счел возможным, наконец, устать и уйти.
В систему управления Ту-154 внедрили сигналы от установленного на борту GPS-приемника KLN-90B. Самолет в автоматическом режиме мог выполнять полет по маршруту, заложенному в это устройство и у экипажей “полтинников” началась золотая эпоха!
Спутниковая навигация – одно из величайших изобретений человечества! Координаты, получаемые по этой линии, очень и очень точны.
Однако, и они бывают небезгрешными, поэтому производители до сих пор не отказались от иных способов получения координат. То есть, на современных самолетах все так же работают инерциальные системы, FMS все еще использует все эти данные, как и прежде… плюс туда же приходят и сигналы от спутников. И все еще остались приборы для ведения банальной радионавигации.
Компьютер по хитрой логике все так же определяет координаты, учитывая все данные, и решает, какие координаты использовать для выполнения полета по маршруту. Конечно же, обычно ими являются координаты GPS.
“А если враги сломают GPS”?
На современных самолетах, о которых я веду речь (например, Вoeing 737NG) если по мнению компьютера сигналы, поступающие от спутников, выдают некорректную информацию, они автоматически отключаются от “обновления позиции” – а пилот уведомляется об этом с помощью специального сообщения. Угрозы для полета нет никакой.Пилоты, выполняющие рейсы в Симферополь, частенько с этим сталкиваются. Но это никак не влияет на безопасность этих полетов. Просто назит. К слову, нет никакой уверенности, что помехи в GPS вводят “враги”…
В итоге, выполнение полета по любому маршруту (за исключением очень северных и южных широт), превратилось в довольно простую задачу.
Посадки в тумане
В завершение, немного информации о том, как самолет в тумане попадают на полосу.
Конечно же, тут задействованы высшие силы.
Все дело в оборудовании для выполнения точных заходов на посадку. И, увы – на дворе 21-й век, но далеко не все аэропорты имеют оное, которое называется ILS – инструментальная система посадки.
Система содержит два излучателя, которые формируют лучи особой формы – один направлен строго вдоль оси взлетно-посадочной полосы, другой под определенным углом (обычно 3 градуса) к зоне приземления. Оборудование самолета принимает эти сигналы, определяют положение самолета относительно их, выдают информацию пилоту и в идеальном случае, самолет летит строго по нужной траектории. Если по достижению минимальной высоты (высота принятия решения) не увидит необходимые ориентиры, он должен уйти на второй круг.
Высота принятия решения зависит от разных факторов – оборудование аэропорта, самолета, допуск экипажа – и в принципе может быть 0 м.
Но, повторюсь, есть это удовольствие далеко не на каждой взлетно-посадочной полосе. Это достаточно дорогое оборудование, требующее надлежащего (и дорогого) обслуживания и контроля.
В “Золотую эру” получили распространение незамысловатые системы приборного захода на посадку – установка радиомаяков в створе или поблизости от ВПП. Они неспособны наводить самолет по курсу*= и глиссаде, пилот самостоятельно ориентировался, чтобы лететь на них – так же, как при полете по маршруту с использованием “стрелочек”. Минимумы захода конечно же, значительно более высокие, чем при использовании системы ИЛС – то есть, погода должна быть лучше. Такие заходы, ввиду отсутствия наведения по глиссаде, называют “неточными”.
Вне темы
В последние годы популярность набирают системы захода на посадку, использующие спутники и наземную корректирующую станцию для удивительно точного определения самолета относительно ВПП. Считается, что за такими заходами (GLS) будущее.
Замечу, что современные самолеты, имеющие FMS, способны выполнять заходы при отсутствии каких-либо радионавигационных средств в аэропорту в принципе.
Заключение
FMS, спутники, ИЛС и прочее – несмотря на все достижения науки, грамотный пилот конечно же, применяет в полете все способы определения положения самолета (разве что по звездам уже не ориентируется), а не просто вкушает курицу и читает газеты, полагаясь на возможности бортового компьютера.
Спасибо за внимание!
Летайте безопасно!
Мой инстаграм
Мой канал на Youtube
