Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
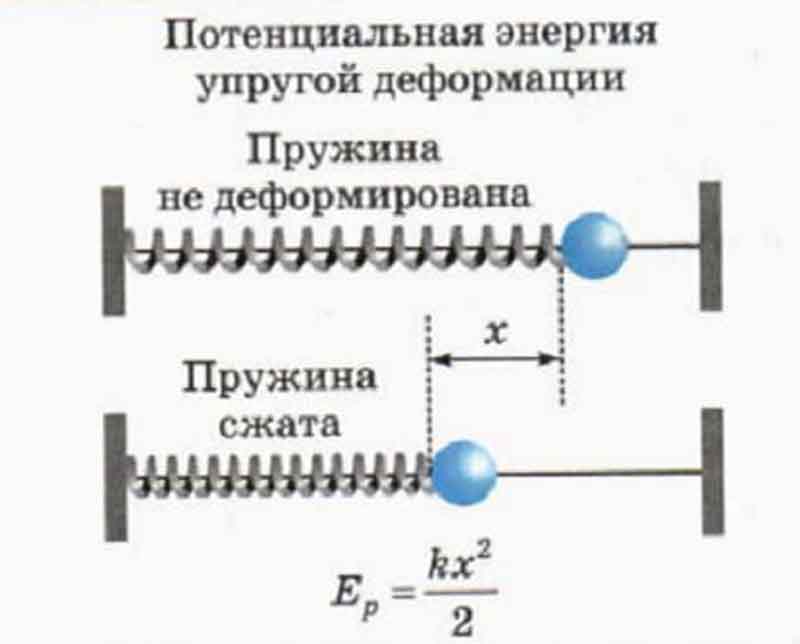
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
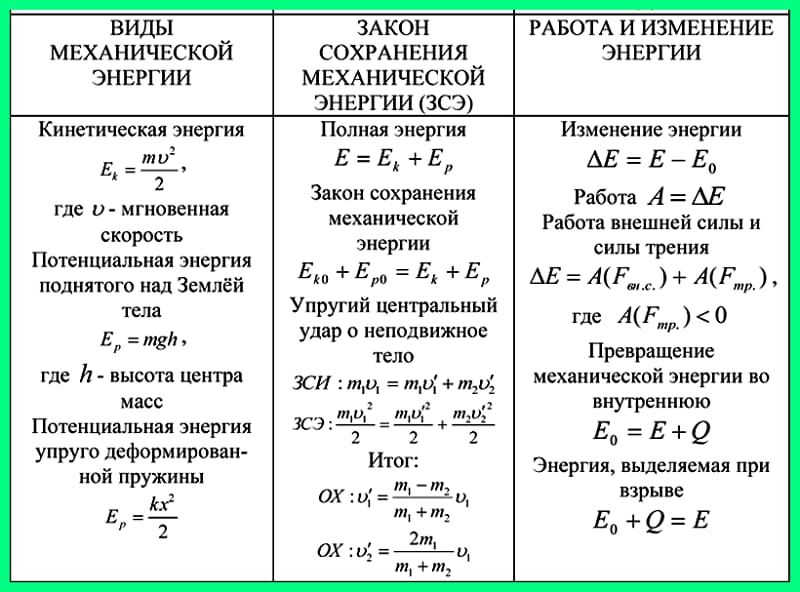
Во многих механизмах используется потенциальная и кинетическая энергия пружины. Их используют для выполнения различных действий. В отдельных узлах они фиксируют детали в определенном положении, не позволяя смещать в какую-либо сторону (барабан револьвера относительно корпуса). Другие пружинные системы возвращают исполнительный механизм в исходное положение (курок ручного огнестрельного оружия). Есть устройства, где узлы с гибкими свойствами совершают перемещения в устойчивое положение (механические стабилизаторы).
Работа связана с изменением геометрических параметров упругого тела. Прилагая нагрузку, заставляют эластичную деталь сжиматься (растягиваться или изгибаться). При этом наблюдается запасание энергии. Возвратное действие сопровождается набором скорости. Попутно возрастает кинетическая энергия.
Содержание:
- Потенциальная энергия пружины
- Закон сохранения механической энергии
- Кинетическая энергия
- Использование энергии пружины на практике
Потенциальная энергия пружины
Рассматривая в качестве накопителя энергии пружину, следует отметить ее отличительные свойства от иных физических тел, которые могут накапливать энергетический потенциал. Традиционно понимается следующее: для накопления потенциала для последующего движения необходимо совершение движения в силовом поле:
Еп = F ⋅ l, Дж (Н·м),
где Еп– потенциальная энергия положения, Дж;
F – сила, действующая на тело, Н;
l – величина перемещения в силовом поле, м.
Энергия (работа) измеряются в Джоулях. Величина представляет произведение силы (Н) на величину перемещения (м).
Если рассматривать условие в поле тяготения, то величина силы находится произведением ускорения свободного падения на массу. Здесь сила веса находится с учетом g:
Еп = G ⋅ h = m ⋅ g ⋅ h, Дж
здесь G – вес тела, Н;
m – масса тела, кг;
g – ускорение свободного падения. На Земле эта величина составляет g = 9,81 м/с².
Если расстраивается пружина, то силу F нужно определять, как величину, пропорциональную перемещению:
F = K ⋅ x, Н,
где k – модуль упругости, Н/м;
х – перемещение при сжатии, м.
Величина сжатия может изменяться по величине, поэтому математики предложили анализировать подобные явления с помощью бесконечно малых величин (dx) .
При наличии непостоянной силы, зависящей от перемещения, дифференциальное уравнение запишется в виде:
dEп = k ⋅ x ⋅ dx
здесь dEп – элементарная работа, Дж;
dx – элементарное приращение сжатия, Н.
Интегральное уравнение на конечном перемещении запишется в виде. Ниже вывод формулы:
Пределами интегрирования является интервал от 0 до х. Деформированная пружина приобретает запас по энергетическим показателям
Окончательно формула для расчета величины потенциальной энергии сжатия (растягивания или изгиба) пружины запишется формулой:
Закон сохранения механической энергии
Закон сохранения энергии существует независимо от желания наблюдателя. Все физические законы имеют статистический характер: существуют только подтверждения их выполнения, нет ни одного адекватно выполненного опыта, при котором наблюдается нарушение этой закономерности. Природные явления только подтверждают сохранность работы и энергозатрат, затраченных на ее выполнение.
На основании изложенного сформулировано положение:
где Ек – кинетическая энергия, Дж.
Рассматривая перемещения тела, наблюдаются изменения потенциальной и кинетической энергий. При этом сумма значений остается постоянной.
Проще всего проследить за изменениями между разными видами энергетических показателей при рассмотрении движения маятника.

Из крайнего положения (шарик на нити отклонился в одну из сторон, Еп = max) тело движется под действием силы тяжести. При этом снижается запасенная энергия. Движение сопровождается увеличением скорости. Поэтому нарастают показатели динамического перемещения Ек.
В нижней точке не остается никаких запасенных эффектов от положения шарика. Он опустился да минимума. Теперь Ек =max.
Поучается, при совершении гармонических колебаний маятник поочередно накапливает то один, то другой вид энергии. Механические превращения из одного вида в другой налицо.
Кинетическая энергия
Движущееся тело характеризуется скалярной величиной (масса) и векторная величина (скорость). Если рассматривать реальное перемещение в пространстве, то можно записать уравнение для определения кинетической энергии:
здесь v – скорость движения тела, м/с.
Использование кинетического преобразования можно наблюдать при колке орехов.
Приподняв камень повыше, далекие предки создавали необходимый потенциал для тяжелого тела.

Приподняв камень на максимальную высоту, разрешают ему свободно падать.
Двигаясь с высоты h, он набирает скорость
Поэтому в конце падения будет получена кинетическая энергия

Рассматривая входящие величины, можно увидеть, как происходит преобразование величин. В конце получается расчетная формула для определения потенциальной энергии.
Даже на уровне вывода зависимостей можно наблюдать выполнение закона сохранения энергии твердого тела.
Использование энергии пружины на практике
Явление преобразования потенциальной энергии пружины в кинетическую используется при стрельбе из лука.
Натягивая тетиву, стреле сообщается потенциал для последующего движения. Чем жестче лук, а также ход при натягивании тетивы, тем выше будет запасенная энергия. Распрямляясь дуги этого оружия, придадут метательному снаряду значительную скорость.
В результате стрела полетит в цель. Ее поражающие свойства определятся величиной кинетической энергии (mv²/2).
Для гашения колебаний, возникающих при движении автомобиля, используют амортизаторы. Основным элементом, воспринимающим вертикальную нагрузку, являются пружины. Они сжимаются, а потом возвращают энергию кузову. В результате заметно снижается ударное воздействие. Дополнительно устанавливается гидроцилиндр, он снижает скорость обратного движения.

Рассмотренные явления используют при проектировании механизмов и устройств для автоматизации процессов в разных отраслях промышленности.
Видео: закон Гука и энергия упругой деформации.
Republished by Blog Post Promoter
Любое
упруго деформированное тело обладает
потенциальной энергией,
так как
изменяется взаимное расположение
отдельных частей тела. Рассмотрим случай
растяжения пружины.
Растяжение
будем производить очень медленно, чтобы
силу
![]() ,
,
с которой мы действуем на пружину, можно
было считать все время равной по модулю
упругой силе![]() .
.
Тогда![]() гдек, х –
гдек, х –
соответственно жесткость и удлинение
пружины. Тогда работа, которую нужно
совершить, чтобы вызвать удлинение (или
сокращение) х
пружины,
равна
![]() (8.12)
(8.12)
Эта
работа идет на увеличение потенциальной
энергии пружины. Следовательно,
зависимость потенциальной энергии
пружины от удлинения х
имеет вид
![]() , (8.13)
, (8.13)
если
считать, что потенциальная энергия
недеформированной пружины равна нулю.
Потенциальная энергия упруго деформированного стержня равна
![]() ,
,
(8.14)
где
![]() –
–
объем стержня.
Отношение
энергии
![]() к тому объему
к тому объему![]() ,
,
в котором она заключена, называетсяплотностью
энергии u.
Тогда
![]()
– плотность энергии упругой деформации
при растяжении (или сжатии).
Аналогично
нетрудно получить, что плотность энергии
деформации при сдвиге равна
![]() .
.
6. Кручение
Деформации
кручения и изгиба являются деформациями
неоднородными. Это значит, что в этих
случаях деформации внутри тела меняются
от точки к точке.
Возьмем
однородную проволоку, верхний конец ее
закрепим, а к нижнему концу приложим
закручивающие силы. Они создадут
вращающий момент относительно продольной
оси проволоки. При этом каждый радиус
нижнего основания повернется вокруг
продольной оси на угол
![]() .
.
Такая деформация называется кручением.
Закон Гука для деформации кручения
имеет вид
![]() , (8.15)
, (8.15)
где
![]() – модуль кручения, постоянная для данной
– модуль кручения, постоянная для данной
проволоки. Модуль кручения зависит не
только от материала, но и от геометрических
размеров проволоки.
Выведем
выражение для модуля кручения.
Пусть
имеется цилиндрическая трубка радиуса
![]() .
.
Причем толщина ее![]() очень
очень
мала по сравнению с радиусом. Площадь
сечения трубки равна
![]() .
.
Обозначим через![]() касательное напряжение в том же основании.
касательное напряжение в том же основании.
Тогда момент сил, действующий на это
основание, будет![]() .
.
При закручивании совершается работа .
.
Разделим
ее на объем трубки
![]() .
.
Найдем плотность упругой энергии при
деформации кручения
 (8.16)
(8.16)
Найдем
эту же величину иначе.
Мысленно
вырежем из трубки бесконечно короткую
часть (рис.8.5).
|
|
Рис. |
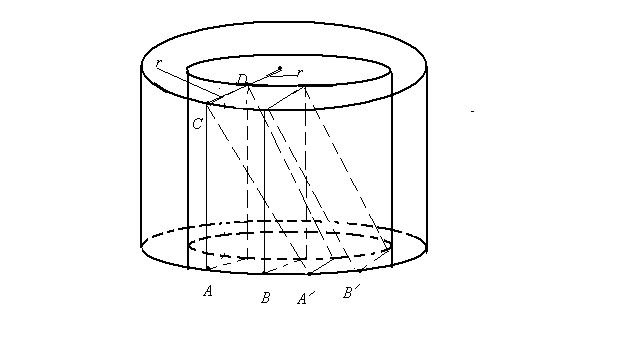
В
результате кручения бесконечно малый
элемент трубки ABDC
перейдет в положение
![]() .
.
Это есть сдвиг. Таким образом, деформацию
кручения можно рассматривать как
неоднородный сдвиг. Плотность упругой
энергии при сдвиге равна
 (8.17)
(8.17)
Приравнивая
его выражению (8.16), находим искомое
соотношение
 (8.18)
(8.18)
Если
стенка трубки имеет конечную толщину,
то модуль
![]() найдется интегрированием последнего
найдется интегрированием последнего
выражения по![]() .
.
Это дает
где
![]() – внутренний радиус трубки,
– внутренний радиус трубки,![]() – внешний радиус трубки.
– внешний радиус трубки.
Для
сплошной проволоки радиуса
![]() модуль
модуль
кручения
 .
.
Контрольные вопросы
-
Что
называется деформацией? Какие деформации
называются упругими? Приведите примеры
упругих деформаций. -
Какова физическая
сущность упругих сил? -
Сформулируйте
закон Гука? Когда он справедлив? -
Дайте
объяснение качественной диаграмме
напряжений. Что такое предел
пропорциональности, упругости и
прочности? -
Что такое упругий
гистерезис и упругое последействие? -
Каков физический
смысл модуля Юнга и модуля сдвига? -
Что такое упругое
последействие? -
Выведите выражения
для деформаций при всестороннем
растяжении. -
Что называется
коэффициентом Пуассона? -
Определите энергию
деформированного тела. -
Что называется
плотностью упругой энергии? Получите
формулы этой энергии при растяжении и
сдвиге. -
Какой вид имеет
закон Гука при кручении. -
Выведите выражение
для модуля кручения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Это энергия, запасенная в результате приложения силы для деформации упругого объекта.
Энергия сохраняется до тех пор, пока сила не будет снята, и объект не вернется к своей первоначальной форме, выполняя работу в процессе. Деформация может включать сжатие, растяжение или скручивание объекта.
Многие объекты предназначены специально для хранения упругой потенциальной энергии, например:
- спиральная пружина заводных часов;
- растянутый лук лучника;
- надувной шар, сжатый в тот момент, когда он отскакивает от кирпичной стены.
Объект, предназначенный для хранения потенциальной упругой энергии, обычно имеет высокий предел упругости, однако все упругие объекты имеют предел нагрузки, которую они могут выдержать.
Когда деформация превышает предел упругости, объект больше не вернется к своей первоначальной форме.
Совсем недавно заводные механические часы с пружинами были популярными аксессуарами. В настоящее время мы не склонны использовать их, потому что не существует материалов с достаточно высоким пределом упругости для хранения упругой потенциальной энергии с достаточно высокой плотностью энергии.
Как рассчитать упругую потенциальную энергию для идеальной пружины?
Закон Гука об упругости обсуждает, как величина силы FF в идеальной пружине линейно зависит от длины сжатия или растяжения ΔxΔx.
F=−k⋅ΔxF = – k cdot Δx,
где kk – некоторое положительное число, известное как постоянная пружины.
Это консервативная сила, а у консервативных сил есть потенциальные энергии, связанные с ними.
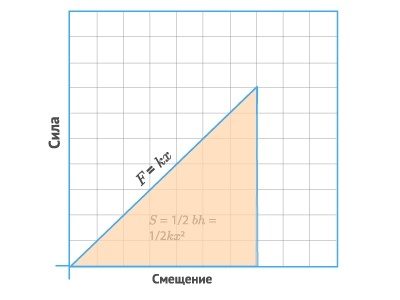
Из определения работы мы знаем, что площадь под графиком силы против смещения дает работу, проделанную силой. На рисунке 1 показан график зависимости силы от смещения для пружины. Поскольку площадь под кривой представляет собой треугольник, и в идеальной пружине энергия не теряется, потенциальная энергия упругости UU можно найти по проделанной работе:
U = 12(△x)⋅k(△x) = 12k(△x)2U;=;frac12(triangle x)cdot k(triangle x);=;frac12k(triangle x)^2
Настоящие упругие материалы
Некоторые упругие материалы, такие как резиновые ленты и гибкие пластмассы, могут функционировать как пружины, но часто имеют гистерезис, это означает, что кривая сила –растяжение следует по другому пути, когда материал деформируется, по сравнению с тем, когда он возвращается к своему равновесному положению.
К счастью, основной метод применения определения работы, который мы использовали для идеальной пружины, также работает для упругих материалов в целом. Упругая потенциальная энергия всегда может быть найдена из области под кривой зависимости силы от растяжения, независимо от формы кривой.
Тест по теме «Упругая потенциальная энергия»
Потенциальная энергия упруго деформированного тела — физическая величина, равная половине произведения жесткости тела на квадрат его деформации.

Потенциальная энергия упруго деформированного тела зависит от взаимного положения частей тела относительно друг друга, например витков пружины. Работа, которую может совершить растянутая пружина при перемещении ее конца, зависит только от начального и конечного растяжений пружины.

Найдем работу, которую может совершить растянутая пружина, возвращаясь к не растянутому состоянию, то есть найдем потенциальную энергию растянутой пружины.

Потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Из этой формулы видно, что, растягивая с одной и той же силой разные пружины, мы сообщим им различный запас потенциальной энергии: чем жестче пружина, то есть чем больше коэффициент упругости, тем меньше потенциальная энергия; и наоборот: чем мягче пружина, тем больше энергия, которую она запасет при данной силе, растянувшей ее. Это можно уяснить себе наглядно, если учесть, что при одинаковых действующих силах растяжение мягкой пружины больше, чем жесткой, а потому больше и произведение силы на путь точки приложения силы.
Обозначения:
 — потенциальная энергия тела
— потенциальная энергия тела
 — коэффициент жесткости (или просто жесткость) пружины
— коэффициент жесткости (или просто жесткость) пружины
 — абсолютная деформация (удлинение или сжатие пружины)
— абсолютная деформация (удлинение или сжатие пружины)
A — работа, которую совершает растянутая пружина
