Во многих механизмах используется потенциальная и кинетическая энергия пружины. Их используют для выполнения различных действий. В отдельных узлах они фиксируют детали в определенном положении, не позволяя смещать в какую-либо сторону (барабан револьвера относительно корпуса). Другие пружинные системы возвращают исполнительный механизм в исходное положение (курок ручного огнестрельного оружия). Есть устройства, где узлы с гибкими свойствами совершают перемещения в устойчивое положение (механические стабилизаторы).
Работа связана с изменением геометрических параметров упругого тела. Прилагая нагрузку, заставляют эластичную деталь сжиматься (растягиваться или изгибаться). При этом наблюдается запасание энергии. Возвратное действие сопровождается набором скорости. Попутно возрастает кинетическая энергия.
Содержание:
- Потенциальная энергия пружины
- Закон сохранения механической энергии
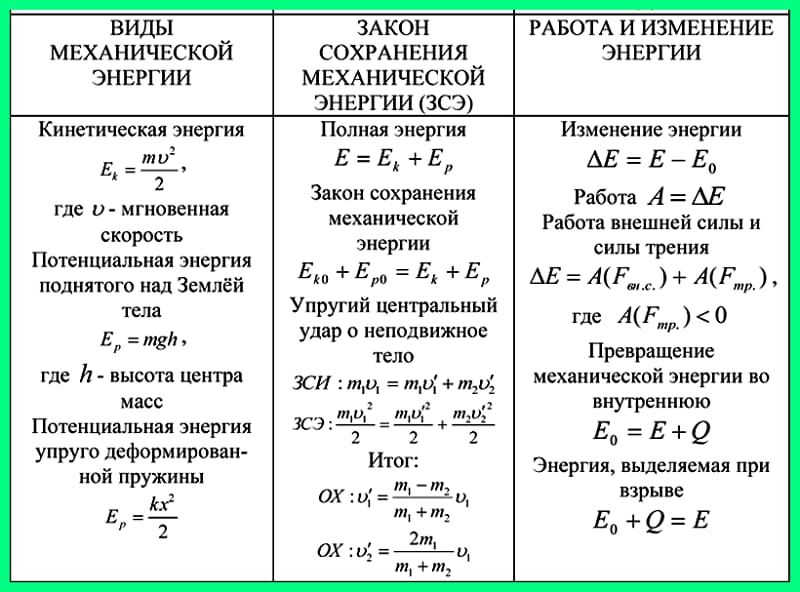
- Кинетическая энергия
- Использование энергии пружины на практике
Потенциальная энергия пружины
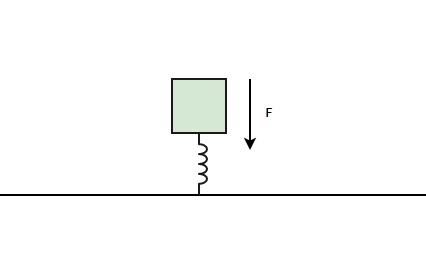
Рассматривая в качестве накопителя энергии пружину, следует отметить ее отличительные свойства от иных физических тел, которые могут накапливать энергетический потенциал. Традиционно понимается следующее: для накопления потенциала для последующего движения необходимо совершение движения в силовом поле:
Еп = F ⋅ l, Дж (Н·м),
где Еп– потенциальная энергия положения, Дж;
F – сила, действующая на тело, Н;
l – величина перемещения в силовом поле, м.
Энергия (работа) измеряются в Джоулях. Величина представляет произведение силы (Н) на величину перемещения (м).
Если рассматривать условие в поле тяготения, то величина силы находится произведением ускорения свободного падения на массу. Здесь сила веса находится с учетом g:
Еп = G ⋅ h = m ⋅ g ⋅ h, Дж
здесь G – вес тела, Н;
m – масса тела, кг;
g – ускорение свободного падения. На Земле эта величина составляет g = 9,81 м/с².
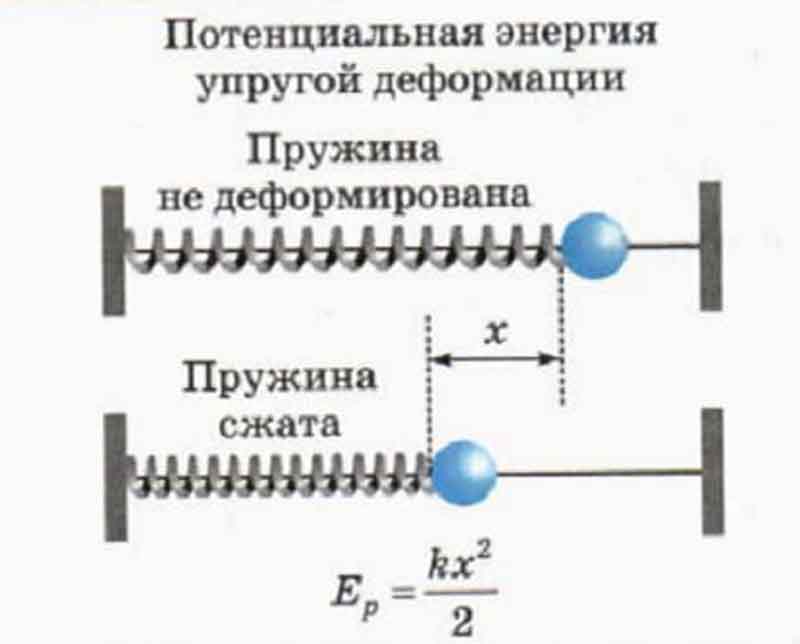
Если расстраивается пружина, то силу F нужно определять, как величину, пропорциональную перемещению:
F = K ⋅ x, Н,
где k – модуль упругости, Н/м;
х – перемещение при сжатии, м.
Величина сжатия может изменяться по величине, поэтому математики предложили анализировать подобные явления с помощью бесконечно малых величин (dx) .
При наличии непостоянной силы, зависящей от перемещения, дифференциальное уравнение запишется в виде:
dEп = k ⋅ x ⋅ dx
здесь dEп – элементарная работа, Дж;
dx – элементарное приращение сжатия, Н.
Интегральное уравнение на конечном перемещении запишется в виде. Ниже вывод формулы:
Пределами интегрирования является интервал от 0 до х. Деформированная пружина приобретает запас по энергетическим показателям
Окончательно формула для расчета величины потенциальной энергии сжатия (растягивания или изгиба) пружины запишется формулой:
Закон сохранения механической энергии
Закон сохранения энергии существует независимо от желания наблюдателя. Все физические законы имеют статистический характер: существуют только подтверждения их выполнения, нет ни одного адекватно выполненного опыта, при котором наблюдается нарушение этой закономерности. Природные явления только подтверждают сохранность работы и энергозатрат, затраченных на ее выполнение.
На основании изложенного сформулировано положение:
где Ек – кинетическая энергия, Дж.
Рассматривая перемещения тела, наблюдаются изменения потенциальной и кинетической энергий. При этом сумма значений остается постоянной.
Проще всего проследить за изменениями между разными видами энергетических показателей при рассмотрении движения маятника.

Из крайнего положения (шарик на нити отклонился в одну из сторон, Еп = max) тело движется под действием силы тяжести. При этом снижается запасенная энергия. Движение сопровождается увеличением скорости. Поэтому нарастают показатели динамического перемещения Ек.
В нижней точке не остается никаких запасенных эффектов от положения шарика. Он опустился да минимума. Теперь Ек =max.
Поучается, при совершении гармонических колебаний маятник поочередно накапливает то один, то другой вид энергии. Механические превращения из одного вида в другой налицо.
Кинетическая энергия
Движущееся тело характеризуется скалярной величиной (масса) и векторная величина (скорость). Если рассматривать реальное перемещение в пространстве, то можно записать уравнение для определения кинетической энергии:
здесь v – скорость движения тела, м/с.
Использование кинетического преобразования можно наблюдать при колке орехов.
Приподняв камень повыше, далекие предки создавали необходимый потенциал для тяжелого тела.

Приподняв камень на максимальную высоту, разрешают ему свободно падать.
Двигаясь с высоты h, он набирает скорость
Поэтому в конце падения будет получена кинетическая энергия

Рассматривая входящие величины, можно увидеть, как происходит преобразование величин. В конце получается расчетная формула для определения потенциальной энергии.
Даже на уровне вывода зависимостей можно наблюдать выполнение закона сохранения энергии твердого тела.
Использование энергии пружины на практике
Явление преобразования потенциальной энергии пружины в кинетическую используется при стрельбе из лука.
Натягивая тетиву, стреле сообщается потенциал для последующего движения. Чем жестче лук, а также ход при натягивании тетивы, тем выше будет запасенная энергия. Распрямляясь дуги этого оружия, придадут метательному снаряду значительную скорость.
В результате стрела полетит в цель. Ее поражающие свойства определятся величиной кинетической энергии (mv²/2).
Для гашения колебаний, возникающих при движении автомобиля, используют амортизаторы. Основным элементом, воспринимающим вертикальную нагрузку, являются пружины. Они сжимаются, а потом возвращают энергию кузову. В результате заметно снижается ударное воздействие. Дополнительно устанавливается гидроцилиндр, он снижает скорость обратного движения.

Рассмотренные явления используют при проектировании механизмов и устройств для автоматизации процессов в разных отраслях промышленности.
Видео: закон Гука и энергия упругой деформации.
Republished by Blog Post Promoter
Встречается довольно большое количество различных механизмов, частью которых является пружина. Этот конструктивный элемент характеризуется довольно большим количество различных особенностей, которые должны учитываться. Примером можно назвать понятие потенциальной энергии пружины. Рассмотрим все особенности данного вопроса подробнее.

Понятие потенциальной энергии пружины
При рассмотрении того, что такое потенциальная энергия пружины следует уделить внимание самому понятию – свойство, которым могут обладать тела при нахождении на земле. Этот момент определяет то, что ей могут обладать самые разнообразные изделия, в том числе рассматриваемое. К особенностям рассматриваемого понятия можно отнести следующее:
- Потенциальная энергия в рассматриваемом случае формируется по причине изменения состояния. Даже при несущественном смещении витков относительно друг друга считается изменением состояния подобного изделия.
- Для того чтобы изменить состояние изделия совершается определенное действие. Зачастую для этого проводится прикладывание усилия. При этом важно провести расчет требуемого усилия для сжатия витков.
- После выполнения определенной работы большая часть усилия, которое было потрачено на выполнение действия высвобождается при определенных обстоятельствах. Как правило, этот процесс предусматривает возврат витков в свое первоначальное положение. Это достигается за счет особой формы изделия, а также применения соответствующего материала, который обладает повышенной упругостью. Именно за счет этого свойства зачастую проводится установка рассматриваемого изделия. Показатель может достигать весьма высоких показателей, которой достаточно для реализации различных задач. Распространенным примером можно назвать установку пружины в запорных и предохранительных элементах, которые отвечают за непосредственное возращение запорного элемента в требуемое положение.

Она также широко применяется при создании самых различных механизмов, к примеру, заводных часов. При проектировании различных механизмов учитывается закон сохранения механической силы, которая характеризуется довольно большим количеством особенностей.
Закон сохранения механической энергии
Согласно установленным законам механическое воздействие консервативной механической системы сохраняется во времени. Этот момент определяет то, что потенциальная энергия деформированной пружины не может возникнуть сама или исчезнуть куда-нибудь. Именно поэтому для ее создания нужно приложить соответствующее усилие.
Рассматриваемый закон относится к категории интегральных равенств. Эта закономерность определяет то, что он складывается их действия дифференциальных законов, является свойством или признаком совокупного воздействия.
Для проведения соответствующих расчетов должна применяться определенная формула. Сила, с которой оказывается воздействие, не является постоянной. Именно поэтому для ее вычисления применяется графический метод. Самая простая зависимость может быть описана следующим образом: F=kx. При применении подобной зависимости построенная координатная линия будет представлена прямой линией, которая расположена под углом относительно системы координат.

Приписать подобному устройству потенциальную энергию можно только в том случае, если она равна максимальной работе и не зависит от условной траектории движения. Проведенные исследования указывают на то, что подобная работа подчиняется закону Гука. Для определения основного показателя применяется следующая формула: U=kk2/2.
Для деформирования витков к ним должно быть приложено определенное усилие, так как в противном случае кинетическая сила не возникнет.
Динамика твердого тела
Некоторые определить выражения (определяется при применении наиболее подходящих формул) можно только с учетом правил, касающихся динамики твердых объектов. Этому вопросу посвящен целый раздел. При расчете потенциальной энергии сжатой пружины также применяются некоторые законы этого раздела
Динамика твердого тела рассматривается по причине того, что в большинстве случаев механизм совершает действие, связанное с непосредственным перемещением какого-либо объекта.
Рассматриваемое свойство изделия может изменяться в зависимости от динамики твердого тела. Это связано с тем, что на изделие оказывается и воздействие со стороны окружающей среды. Примером можно назвать трение или нагрев. 
Момент силы и момент импульса относительно оси
Рассмотрение деформации пружины проводится также с учетом момента силы и импульса относительно оси. Эти два параметра позволяют рассчитать все требуемые показатели с более высокой точностью. Довольно распространенным вопросом можно назвать чему равен момент силы – векторная величина, которая определяется векторному произведению радиуса на вектор приложенной силы.
Момент импульса – величина, которая применяется для определения количества вращательного движения.
Среди особенностей подобного показателя можно отметить следующее:
- Масса вращения. Объект может характеризоваться различной массой.
- Распределение относительно оси. Ось может быть расположена на различном расстоянии от самого объекта.
- Скорость вращения. Это свойство считается наиболее важным, в зависимости от конструкции он может быть постоянным или изменяться.

Расчет каждого показателя проводится при применении соответствующей формулы. В некоторых случаях проводится измерение требуемых вводных данных, без которых провести вычисления не получится.
Уравнение движения вращающегося тела
Рассматривая подобное свойство также следует уделить внимание уравнению движения вращающегося тела. Не стоит забывать о том, что вращательное движение твердого тела характеризуется наличием как минимум двух точек. При этом отметим нижеприведенные особенности:
- Прямая, которая соединяет две точки, выступает в качестве оси вращения.
- Есть возможность провести определение места положения объекта в случае вычисления заднего угла между двумя плоскостями.
- Наиболее важным показателем можно назвать угловую скорость. Она связана с инерцией, которая возникает при вращении объекта.
Для вычисления угловой скорости применяется специальная формула, которая выглядит следующим образом: w=df/dt. В некоторых случаях проводится вычисление углового ускорения, которое также является важной величиной.
Энергия – важнейшее понятие и термин в механике. Что такое энергия, и что она значит? Существует множество определений, и вот одно из них.
Что такое энергия?
Энергия в физике – это способность тела совершать работу.
Кинетическая энергия
Что такое кинетическая энергия?
Рассмотрим тело, которое двигалось под действием каких-то сил, изменило свою скорость с v1→ до v2→. В этом случае силы, действующие на тело, совершили определенную работу A.
Работа всех сил, действующих на тело, равна работе равнодействующей силы.

Fр→=F1→+F2→
A=F1·s·cosα1+F2·s·cosα2=Fрcosα.
Как находить связь между изменением скорости тела и работой, совершенной действующими на тело силами. Для простоты будем считать, что на тело действует одна сила F→, направленная вдоль прямой линии. Под действием этой силы тело движется равноускоренно и прямолинейно. В этом случае векторы F→, v→, a→, s→ совпадают по направлению и их можно рассматривать как алгебраические величины.
Работа силы F→ равна A=Fs. Перемещение тела выражается формулой s=v22-v122a. Отсюда:
A=Fs=F·v22-v122a=ma·v22-v122a
A=mv22-mv122=mv222-mv122.
Если вычислять, то работа, совершенная силой, пропорционально изменению квадрата скорости тела.
Кинетическая энергия тела равна половине произведения массы тела на квадрат его скорости. Вот как выглядит формула кинетической энергии:
EK=mv22.
Кинетическая энергия – это энергия движения тела. При нулевой скорости она равна нулю.
Теорема о кинетической энергии
Вновь будем работать с рассмотренным примером и сформулируем теорему о кинетической энергии тела.
Работа приложенной к телу силы равна изменению кинетической энергии тела. Данное утверждение справедливо и тогда, когда тело движется под действием изменяющейся по модулю и направлению силы.
A=EK2-EK1.
Таким образом, кинетическая энергия тела массы m, движущегося со скоростью v→, будет измеряться (при измерении) и равна работе, которую сила должна совершить, чтобы разогнать тело до этой скорости.
A=mv22=EK.
Чтобы остановить тело, нужно совершить работу
A=-mv22=-EK
Потенциальная энергия
Что будет означать или обозначать кинетическая энергия?
Кинетическая энергия – это энергия движения. Наряду с кинетической энергией есть еще такой вид энергии как потенциальная энергия, то есть энергия взаимодействия тел, которая будет вычисляться и зависеть от их положения. Кинетическая и потенциальная энергии рассматриваются параллельно.
Формула потенциальной энергии:
E пот = m * g * h
Например, тело поднято над поверхностью земли. Чем выше оно поднято, тем больше будет потенциал-я энергия. Когда тело движется и падает вниз под действием силы тяжести (притяжения), эта сила совершает работу. Причем работа силы тяжести определяется только вертикальным перемещением тела и не зависит от траектории.

Вообще о потенциально энергии можно говорить только в контексте тех сил, работа которых не зависит от формы траектории тела. Такие силы называются консервативными.
Примеры консервативных сил: сила тяжести, сила упругости.
Когда тело движется вертикально вверх, сила тяжести совершает отрицательную работу.
Рассмотрим вычисление на примере, когда шар переместился из точки с высотой h1 в точку с высотой h2.

При этом сила тяжести совершила работу, равную
A=-mg(h2-h1)=-(mgh2-mgh1).
Эта работа равна изменению величины mgh, взятому с противоположным знаком.
Величина ЕП=mgh – потенциальна энергия в поле силы тяжести. На нулевом уровне (на земле) потенциальную энергию тела можно не рассчитывать: она равна нулю.
Потенциальная энергия – часть полной механической энергии системы, с нахождением в поле консервативных сил. Потенциальная энергия зависит от положения точек, составляющих систему. Механическая энергия – это сумма потенциальной и кинетической энергий, которые есть в компонентах механической системы.
Можно говорить о потенциальной энергии в поле силы тяжести, потенциальной энергии сжатой пружины (пружинной энергии) и т.д.
Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
A=-(EП2-EП1).
Ясно, что потенциальная энергия зависит от выбора нулевого уровня (начала координат оси OY). Подчеркнем, что физический смысл имеет изменение потенциальной энергии при перемещении тел друг относительно друга. При любом выборе нулевого уровня изменение потенциальной энергии будет одинаковым.
При расчете движения тел в поле гравитации Земли, но на значительных расстояниях от нее, во внимание нужно принимать закон всемирного тяготения (зависимость силы тяготения от расстояния до цента Земли). Приведем формулу, выражающую зависимость потенциальной энергии тела.
EП=-GmMr.
Здесь G – гравитационная постоянная, M – масса Земли.
Потенциальная энергия пружины
Представим, что в первом случае мы взяли пружину и удлинили ее на величину x. Во втором случае мы сначала удлинили пружину на 2x, а затем уменьшили на x. В обоих случаях пружина оказалась растянута на x, но это было сделано разными способами.
При этом работа силы упругости при изменении длины пружины на x в обоих случаях была одинакова и равна
Aупр=-A=-kx22.
Величина Eупр=kx22 называется потенциальной энергией сжатой пружины. Она равна работе силы упругости при переходе из данного состояния тела в состояние с нулевой деформацией.
Если перед вами часто поднимается вопрос определения и характеристики энергии, как явления, вам стоит подумать о сохранении описанной выше информации.
A spring is used in almost every mechanical aspect of our daily lives, from the shock absorbers of a car to a gas lighter in the kitchen. Spring is used because of their property to get deformed and come back to their natural state again. Whenever a spring is stretched or compressed, a force is experienced in the opposite direction of this change. This happens because when a spring deviates from its mean position, it tries to come back there. This force is given by Hooke’s law and helps us to analyze the energy stored in the spring.
Hooke’s law
Force is required to stretch an elastic object such as a metal spring or rope. Whenever an elastic object is stretched or compressed. It tends to exert force to oppose that change in shape. This force is given by Hooke’s law. The force exerted by the spring is called restoring force because it is always in the opposite direction of the deformation.
Hooke’s law states that,
Force required to stretch an elastic object such as a metal spring is directly proportional to the extension of the spring for short distances. Since this restoring force is in the opposite direction, a negative sign is used.
If x is the displacement relative to the unstretched length of the spring and F is the force exerted by it. Then,
F = -kx
Here, k is the spring constant.
So, whenever a spring is stretched downwards, the force is exerted upwards and vice versa.
Elastic Potential Energy
Elastic potential energy is the energy that gets stored in elastic objects when force is applied to them to deform their shape and size. Then energy is stored until the force is removed. After that, objects start to return to their normal shapes and this energy is converted into some other type of energy. Examples of some objects storing elastic potential energy are:
- A stretched or compressed spring.
- A twisted rubber band.
- A bouncy ball, compressed at the moment it strikes the wall and bounces back.
Calculating the potential energy stored in the spring
Hooke’s law mentioned above, states how the restoring force in the spring varies as the net displacement from the mean position of the spring. Considering the net displacement to be  and the restoring force being denoted by F,
and the restoring force being denoted by F,
F = -kx
This force is a conservative force, and conservative forces have potential energies associated with them. It is known that the work done is defined as the product of force and displacement.
W = F.x
For a variable force F, and the net displacement x,
W = 
Now at the displacement x, for an infinitesimally small-displacement and force F,
dW = Fdx
⇒ dW = -kxdx
Integrating the above equation for the total work done,
dW = kxdx
⇒∫dW = ∫kxdx
⇒ W = 
So, this is the total work done for the displacement x. This work done is stored as potential energy in the spring. This fact can also be verified through the force versus displacement graph for the spring. The area under the curve in the force-displacement graph gives the elastic potential energy stored in the spring.
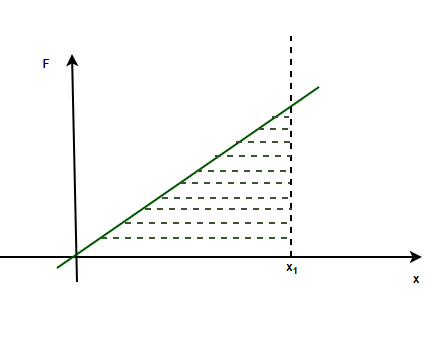
The area under the curve = Area of the shaded region of the curve
= 
= 
= 
Both of the approaches give the same answer.
Thus, elastic potential energy stored in spring with “x” displacement is given by,
P.E =
Sample Problems
Question 1: Find the elastic potential energy stored in the spring with k = 50 N/m when the spring is compressed by 0.2m.
Answer:
Given: k = 50 N/m and x = 0.2m
Now, elastic potential energy stored in the spring is given by,
Plugging the values in the above formula,
P.E =
⇒ P.E =
⇒ P.E =
⇒ P.E = 1 J


Question 2: Find the elastic potential energy stored in the spring with k = 100 N/m when the spring is compressed by 0.1m.
Answer:
Given: k = 100 N/m and x = 0.1m
Now, elastic potential energy stored in the spring is given by,
Plugging the values in the above formula,
P.E =
⇒ P.E =
⇒ P.E =
⇒ P.E = 0.5 J


Question 3: Find the elastic potential energy stored in the spring with k = 100 N/m when the spring is stretched to 0.1m from its natural length of 0.5m.
Answer:
Given: k = 100 N/m and xi = 0.1m and xf = 0.5m
Let the displacement x be given by,
x = 0.5 – 0.1
⇒x = 0.4m
Now, elastic potential energy stored in the spring is given by,
Plugging the values in the above formula,
P.E =
⇒ P.E =
⇒ P.E =
⇒ P.E = 8 J


Question 4: Find the elastic potential energy stored in the spring with k = 100 N/m when the spring is stretched to 0.5m from its natural length of 1 m.
Answer:
Given: k = 100 N/m and xi = 1 m and xf = 0.5m
Let the displacement x be given by,
x = 1 – 0.5
⇒x = 0.5m
Now, elastic potential energy stored in the spring is given by,
Plugging the values in the above formula,
P.E =
⇒ P.E =
⇒ P.E =
⇒ P.E = 12.5 J


Question 5: A spring with spring constant k = 100 N/m was initially compressed by x = 0.4m, after that, it was released and stopped at x = 0.2m compression. Find the work done by the restoring force in this process.
Answer:
Given: k = 100 N/m and xi = 0.4m and xf = 0.2m
The work done will be given by the difference in potential energy of the spring at these two instances.
Elastic potential energy stored in the spring is given by,
At x = 0.4m
Plugging the values in the above formula,
P.Ei =
⇒ P.Ei =
⇒ P.Ei =
⇒ P.Ei = 8 J
At x = 0.2m
Plugging the values in the above formula,
P.Ef =
⇒ P.Ef =
⇒ P.Ef =
⇒ P.Ef = 2 J
W.D = -(P.Ef – P.Ei)
⇒W.D = -2 + 8
⇒W.D = 6J


Question 6: A spring with spring constant k = 20 N/m was initially compressed by x = 0.5m, after that, it was released and stopped at x = 0.1m compression. Find the work done by the restoring force in this process.
Answer:
Given: k = 20 N/m and xi = 0.5m and xf = 0.1m
The work done will be given by the difference in potential energy of the spring at these two instances.
Elastic potential energy stored in the spring is given by,
At x = 0.5m
Plugging the values in the above formula,
P.Ei =
⇒ P.Ei =
⇒ P.Ei =
⇒ P.Ei = 2.5 J
At x = 0.1m
Plugging the values in the above formula,
P.Ef =
⇒ P.Ef =
⇒ P.Ef =
⇒ P.Ef = 0.1 J.
W.D = -(P.Ef – P.Ei)
⇒W.D = -0.1 + 2.5
⇒W.D = 2.4J




Last Updated :
30 Jun, 2021
Like Article
Save Article
