Проекции скорости и ускорения
Для выполнения
расчетов скоростей и ускорений необходимо
переходить от записи уравнений в
векторной форме к записи уравнений в
алгебраической форме.
Векторы начальной
скорости
![]() и ускорения
и ускорения![]() могут иметь различные направления,
могут иметь различные направления,
поэтому переход от векторной записи
уравнений к алгебраической может
оказаться весьма трудоемким.
Известно, что
проекция суммы двух векторов на какую-либо
координатную ось равна сумме проекций
слагаемых векторов на ту же ось.
|
|
Поэтому для Проекцию |
|
|
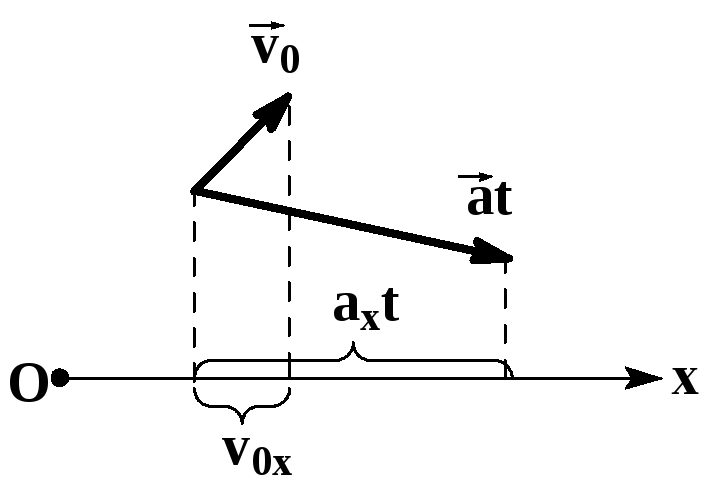
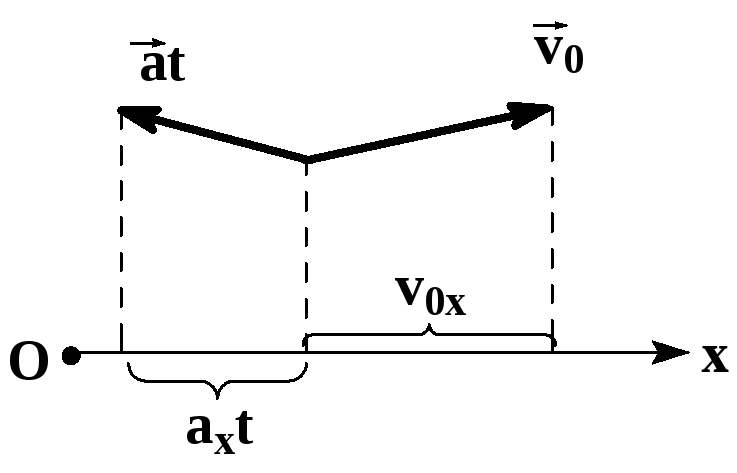
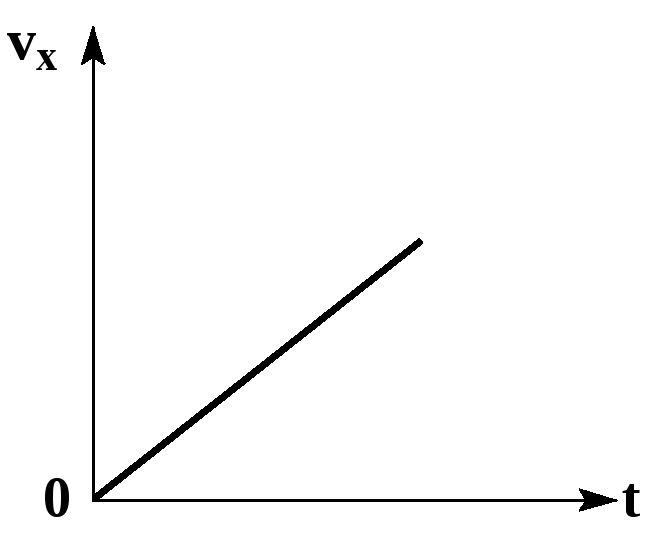
График скорости
Из уравнения
![]() следует, что графиком зависимости
следует, что графиком зависимости
проекции скорости равноускоренного
движения от времени является прямая.
Если проекция начальной скорости на
ось OX равна нулю, то прямая проходит
через начало координат.
|
|
|
Основные
виды движения
-
аn
= 0, a
= 0 –
прямолинейное равномерное движение; -
аn
= 0, a
= const
– прямолинейное равнопеременное
движение; -
аn
= 0, a
0 – прямолинейное
с переменным ускорением; -
аn
= const,
a
= 0 – равномерное
по окружности -
аn
= const,
a
= const
– равнопеременное по окружности -
аn
const,
a
const
– криволинейное с переменным ускорением.
Вращательное движение твердого тела.
Вращательное
движение твердого тела относительно
неподвижной оси
– движение, при котором все точки
твердого тела описывают окружности,
центры которых лежат на одной прямой,
называемой осью
вращения.
Равномерное движение по окружности
Рассмотрим наиболее
простой вид вращательного движения, и
уделим особое внимание центростремительному
ускорению.
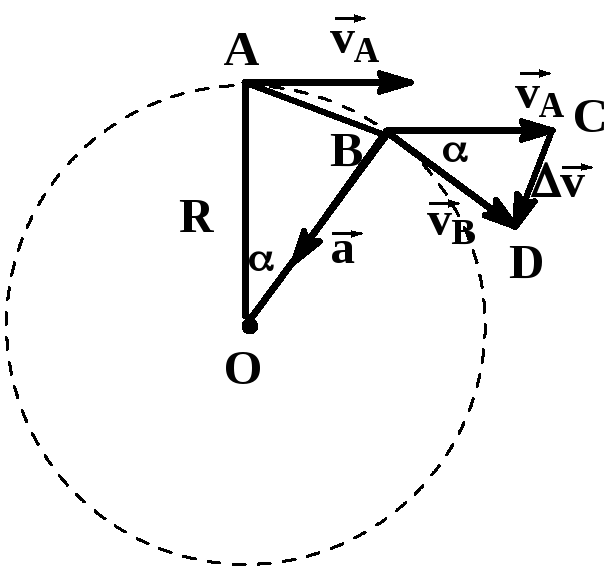
При равномерном
движении по окружности значение скорости
остается постоянным, а направление
вектора скорости
![]() изменяется в процессе движения.
изменяется в процессе движения.
|
|
За |
![]()
Из подобия
треугольников OAB и BCD следует
![]()
Если интервал
времени ∆t
мал, то мал и угол .
При малых значениях угла
длина хорды AB примерно равна длине дуги
AB, т.е.
![]() .
.
Т.к.![]() ,
,![]() ,
,
то получаем
![]()
![]() .
.
Поскольку
![]() ,
,
то получаем
![]()
Период и частота
Промежуток времени,
за который тело совершает полный оборот
при движении по окружности, называется
периодам
обращения
(Т).
Т.к. длина окружности равна 2R,
период обращения при равномерном
движении тела со скоростью v
по окружности радиусом R
равняется:
![]()
Величина, обратная
периоду обращения, называется частотой.
Частота показывает, сколько оборотов
по окружности совершает тело в единицу
времени:
![]() (с-1)
(с-1)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
01.06.2015304.13 Кб31KP.doc
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
Координатный способ определения движения точки:
При координатном способе определения движения точки должны быть даны уравнения движения, т. е. заданы координаты точки как функции времени:

Задание движения точки в прямоугольных координатах
Как известно из курса аналитической геометрии, положение точки M в пространстве может быть определено положением ее проекций P, Q и R на три взаимно перпендикулярные оси (рис. 84), называемые осями координат.
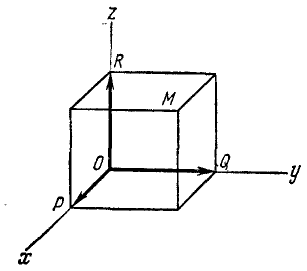
Рис. 84
Положение точки P на оси Ox вполне определяют абсциссой х. Совершенно так же положение точек Q и R определяют ординатой у и аппликатой z.
Если точка M движется относительно осей xOyz, то проекции Р, Q и R перемещаются по осям и координаты точки M изменяются.
Для определения движения точки M нужно знать ее координаты для каждого мгновения, выразить их в функциях времени.
x = x(t), (58′)
y = y(t), (58″)
z = z(t), (58″‘)
Эти функции непрерывны, так как точка не может из одного положения перейти в другое, минуя промежуточные. Они должны быть однозначны, так как точка занимает в пространстве в каждое мгновение только одно положение.
Соотношения (58) называют кинематическими уравнениями движения точки в прямоугольных координатах, а способ определения движения точки посредством соотношений (58) называют координатным способом определения движения точки. Это название неточно, потому что, кроме прямолинейных прямоугольных координат, существует множество других координатных систем.
Если траектория точки лежит в одной плоскости, то движение точки определяют двумя уравнениями в системе координат xОy: x=x(t), y=y(t).
Следовательно, при координатном способе задания движения точки в пространстве нужно задать ее три координаты, а на плоскости—две координаты как функции времени. Если точка движется прямолинейно, то, приняв прямую, по которой она движется, за ось абсцисс, мы определим движение точки одним уравнением
x = x(t).
Если движение точки задано в координатной форме, то для определения ее траектории надо из уравнений движения исключить время
Уравнение траектории
Можно определить траекторию точки, если в уравнениях движения (58) давать аргументу t различные значения и, вычислив соответствующие значения функций, отмечать положения точки по ее координатам. Следовательно. кинематические уравнения движения точки (58) можно
рассматривать как уравнения ее траектории в параметрической форме, а время — как независимый переменный параметр.
Однако более удобно получить уравнение траектории, исключив время из уравнений (58). В самом деле, траекторией называют геометрическое место всех положений движущейся точки, но в геометрии нет понятия времени, а поэтому для получения уравнения траектории нужно из кинематических уравнений движения (58) исключить время t. Если точка движется в плоскости, то, исключив время из уравнений (58′) и (58″), мы получим соотношение, связывающее х и у:
f(x, у) = 0. (59)
Это уравнение плоской кривой—траектории точки. Если же движение задано тремя уравнениями (58), то, исключив время, получим два уравнения между тремя координатами:
 (59/)
(59/)
выражающие, как известно из аналитической геометрии, кривую (траекторию) в пространстве. Точнее говоря, уравнения (59) или (59′) выражают кривую, которая полностью или в некоторой своей части является геометрическим местом всех положений движущейся точки.
Иногда бывает нужно выразить в естественной форме движение точки, заданное в прямоугольных координатах уравнениями (58), и, кроме уравнения траектории, дать также уравнение (51) движения точки по траектории. Чтобы его получить, надо продифференцировать уравнения (58) и полученные дифференциалы координат точки подставить в известную из курса высшей математики формулу, выражающую абсолютную величину элемента дуги:
 (60)
(60)
Проинтегрировав (60), мы получим уравнение (51), выражающее длину дуги s как функцию времени, или, что то же, закон движения точки по траектории.
Задача №1
По заданным уравнениям движения точки в координатной форме найти уравнение траектории и уравнение движения по траектории:
1) х = 5 cos 2t, y = 3+5sin 2t;
2) x=21,2 sin2 t, у = 21,2 cos 2t.
В обоих примерах за единицу длины принят сантиметр, за единицу времени — секунда.
Решение. Чтобы определить уравнение траектории по уравнениям движения, перенесем во втором из заданных уравнений 3 влево, возведем оба уравнения в квадрат и, сложив, получим
x2 + (y-3)2 = 25.
Это уравнение окружности с центром в точке: x = 0, y = +3.
Чтобы получить закон движения, продифференцируем заданные уравнения: dx=—10 sin 2t dt, dy = 10 cos 2t dt.
Возводя в квадрат, складывая, извлекая квадратный корень и интегрируя, находим закон движения по траектории:
s=10t + C, где C = s0.
2) Исключим время из уравнений движения во втором примере:
x+y = 21,2.
Это уравнение первого порядка относительно х и у, следовательно, траектория-прямая линия. Прямая отсекает на положительных направлениях осей координат отрезки по 21,2 см. Однако не вся прямая служит траекторией точки: из заданных уравнений видно, что х и у должны быть всегда положительны и не могут быть больше 21,2 см каждый, поэтому траекторией точки является лишь отрезок прямой x+y = 21,2, лежащей в первом квадранте (рис. 85).
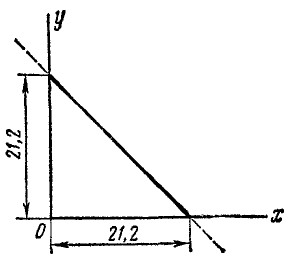
Рис. 85
На этом примере мы видим, что траекторией точки иногда является лишь часть линии, выражаемой уравнением траектории.
Продифференцируем уравнения движения:
dx = 21,2 ∙ 2 sin t cos t dt,
dy = 21,2 ∙ 2 sin t cos t dt.
Теперь no формуле (60) нетрудно найти элемент дуги траектории:

ля получения уравнения (51) движения точки по траектории остается лишь проинтегрировать найденное выражение. Интегрируем и подставляем начальные условия (при t= 0, s0 = 0):

Ответ. Уравнения траекторий x2+(y-3)2= 25 и x+y=21,2; уравнения движения по траектории s=10t+s0 и s = 30 sin 2t.
Задача №2
Движение точки задано уравнениями:
х = x’ cos φ (t)—y’ sin φ (t),
y = x’ sin φ (t) + y’ cos φ (t),
где х’ и у’ — некоторые постоянные величины, a φ(t)— любая функция времени. Определить траекторию точки.
Решение. Возведем каждое из уравнений в квадрат, а затем сложим их:
x2 + y2 = χ‘2 + y‘2.
По условию, х’ и у’ — постоянные. Обозначая сумму их квадратов через r2, получим
x2 + y2 = r2.
Ответ. Окружность с центром в начале координат радиуса 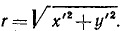 .
.
Задача №3
Поезд длиной l м сначала идет по горизонтальному пути (рис. 86, а), а потом поднимается в гору под углом 2α к горизонту. Считая поезд однородной лентой, найти траекторию его центра тяжести.
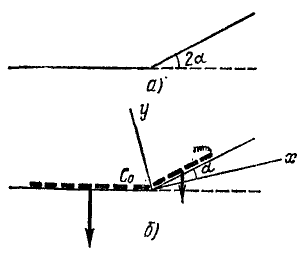
Рис. 86
Решение. Для решения задачи нужно определить координаты центра тяжести поезда, найти уравнения движения центра тяжести и исключить из них время.
Направим оси координат по внутренней и внешней равиоделяшнм угла 2α (рис. 86, б). Траектория центра тяжести поезда не зависит от скорости поезда. Для простоты подсчетов предположим, что он идет равномерно со скоростью υ м/сек и в начальное мгновение t=0 подошел к горе.
Тогда за время t сек на гору поднимется υt м состава поезда и останется на горизонтальном пути l — υt м. Будем считать, что единица длины поезда весит γ.
Применяя формулы (48), найдем координаты центра тяжести поезда:



Координаты центра тяжести представлены здесь как функции времени, следовательно, полученные соотношения являются уравнениями движения центра тяжести поезда. Определяя t (или υt) из первого уравнения и подставляя во второе, найдем уравнение траектории:

Ответ. Парабола.
Задача №4
Мостовой кран движется вдоль цеха согласно уравнению х = t; по крану катится в поперечном направлении тележка согласно уравнению у = 1,5t (х и у—в м, t — в сек). Цепь укорачивается со скоростью t>=0,5. Определить траекторию центра тяжести груза (в начальном положении центр тяжести груза находился в горизонтальной плоскости хОу, ось Oz направлена вертикально вверх).
Решение. В условии задачи даны лишь два уравнения движения и вертикальная скорость груза:

откуда dz = 0,5dt, и легко получаем третье уравнение:
z = 0,5t
Определив t из первого уравнения, подставим во второе и в третье:
y= 1,5x, z = 0,5x
Координаты груза должны удовлетворять одновременно обоим уравнениям, т. е. траектория лежит одновременно в обеих плоскостях и является линией их пересечения.
Ответ. Прямая.
Алгебраическая величина скорости проекции точки на координатную ось равна первой производной от текущей координаты по времени:

Алгебраическая величина скорости проекции точки на ось
Пусть движение точки M определяется тремя уравнениями:
x =x(t), (58′)
y = y(t), (58″)
z = z(t). (58″‘)
По мере движения точки M в пространстве ее проекции P, Q и R движутся по своим прямолинейным траекториям, т. е. по осям координат, и их движения вполне соответствуют движению точки М.
Так, координата (абсцисса) точки P всегда равна абсциссе точки М, а координаты точек QnR всегда равны ординате и аппликате точки М. Следовательно, при движении точки M в пространстве согласно уравнениям (58) точка P движется по оси Ox согласно уравнению (58′), а точки Q и R— соответственно по осям Oy и Oz согласно уравнениям (58″) и (58″‘).
Таким образом, движение точки M в пространстве можно разложить на три прямолинейных движения ее проекций P, Q и R.
Определим скорость υp точки P при движении этой точки по ее прямолинейной траектории Ох, иными словами, определим скорость проекции точки M на ось Ох.
Алгебраическая величина скорости выражается по формуле (53), причем дифференциалом расстояния точки P является дифференциал абсциссы х, а поэтому
 (61)
(61)
Следовательно, алгебраическая величина скорости проекции P точки M на координатную ось равна первой производной от текущей координаты х по времени t. Она положительна, если точка P движется в положительном направлении оси Ох, и отрицательна, если точка P движется в отрицательном направлении.
Аналогично получаем алгебраические скорости проекций Q и R на ось Oy и на ось Oz:
 (61″)
(61″)
 (61″‘)
(61″‘)
Чтобы получить векторы скоростей проекций, надо умножить величины (61) на единичные векторы:
 (61)
(61)
Алгебраическая величина скорости проекции точки на ось равна проекции скорости той же точки на туже ось:
Скорость проекции и проекция скорости
Пусть точка М за бесконечно малый отрезок времени dt передвинулась по своей траектории на элемент дуги ds, абсолютную величину которого выразим формулой (60):

где dx, dy и dz — проекции элемента дуги на оси координат, или, Что то же, элементарные приращения координат точки М.
На рис. 87 эти элементы условно изображены конечными отрезками. Как видно из чертежа, косинусы углов, составляемых элементарным перемещением (а следовательно, и скоростью точки), с осями х, у и z соответственно равны
 (62)
(62)
Величина скорости точки M может быть определена по (53):

Чтобы определить проекцию скорости  на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
 (63′)
(63′)
 (63″)
(63″)
 (63″‘)
(63″‘)
Рис. 87
Равенства (63) словами нужно читать так: проекция скорости точки на ось равна алгебраической скорости проекции точки на ту же ось.
Задача №5
Доказать, что проекция  скорости
скорости  точки M (х, у, z) иа плоскость хОу равняется скорости
точки M (х, у, z) иа плоскость хОу равняется скорости  , с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
, с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
Решение. Скорость точки M составляет с осью Oz угол γυ, следовательно, угол, составляемый ею с плоскостью хОу, равен 90° — yυ п косинус этого угла равен sinγυ. Поэтому модуль проекции скорости точки M на плоскость хОу
Подводя  под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:
под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:

Направления векторов  и
и  тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
Модуль скорости точки равен квадратному корню из суммы квадратов проекций скорости на оси координат:
Модуль скорости. Возведем в квадрат каждое из равенств:
 (63)
(63)
и сложим их:

Сумма квадратов направляющих косинусов равна единице и

или
 (64)
(64)
Перед радикалом взят положительный знак, так как величина скорости (ее модуль) всегда положительна. В этом ее существенное отличие от алгебраической величины скорости (53), характеризующей скорость точки при движении по заданной траектории и имеющей знак « + » или «—» в зависимости от направления движения. Величину (64) иногда называют полной скоростью.
Направление скорости можно определить по направляющим косинусам скорости:

Направляющие косинусы скорости
Равенство (64) позволяет определить модуль скорости точки, движение которой задано уравнениями (58). Направление скорости определяется по косинусам углов, составляемых положительными направлениями осей координат с направлением скорости. Значения этих косинусов, называемых направляющими косинусами скорости, мы получим из уравнений (63):
 (62′)
(62′)
где  ,
,  и
и  — производные от х, у и z по t.
— производные от х, у и z по t.
Если точка движется в плоскости хОу, то γυ = 90o, cosγυ = 0 и cos αυ = sin βυ.
Задача №6
Уравнения движения суть

Определить траекторию и скорость.
Решение. Из уравнений движения следует, что х и у всегда больше нуля.
Для определения уравнения траектории возведем каждое из уравнений движения в квадрат и составим разность
x2 – у2 = a2
Для определения скорости найдем сначала ее проекции:


а затем уже и полную скорость.
Ответ. Траектория — ветвь гиперболы x2 – у2 = a2 — расположена в области положительных значений х; скорость  .
.
Задача №7
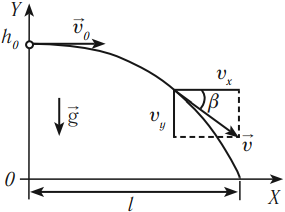
Движение точки задано уравнениями

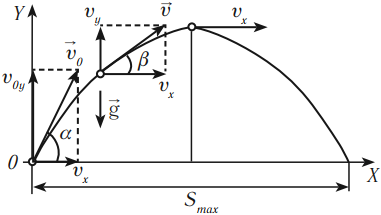
причем ось Ox горизонтальна, ось Oy направлена по вертикали вверх, υ0, g и  —величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
—величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
Решение. Уравнения описывают движение тела, брошенного со скоростью υ0 под углом α0 к горизонту (к оси Ох).
Чтобы найти уравнение траектории, определим время из первого уравнения и подставим найденное значение во второе; получим
уравнение параболы, проходящей через начало координат (рис. 88).
Рис. 88
Чтобы определить координаты наивысшего положения, мы можем применить известные из дифференциального исчисления правила нахождения максимума функции, т. е. взять производную  , приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная
, приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная  . Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:
. Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:

Первое из этих уравнений показывает, что проекция скорости на горизонтальную ось постоянна и равна проекции начальной скорости.
Исследование второго уравнения убеждает, что проекция скорости на вертикальную ось в начальное мгновение положительна и равна υ0 sin α0; затем, по мере увеличения t, проекция υy уменьшается, оставаясь положительной до мгновения  , когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
, когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
Таким образом, точка движется вправо, сначала поднимаясь, затем опускаясь. Мгновение  , при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и
, при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и  . Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:
. Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:

Определим проекции скорости в мгновение, когда точка находится на оси Ох. В это мгновение ордината точки равна нулю. Приравняем пулю второе из уравнений движения:

Точка находится на оси Ox два раза: при t=0 при 
Первое значение t соответствует началу движения, второе —падению точки на ось Ох. Второе значение равно времени всего полета, и оно вдвое больше полученного нами ранее времени наивысшего подъема: время падения равно времени подъема.
Подставляя значение t=0 в уравнения, определяющие проекции скорости, найдем проекции скорости в начальное мгновение:
υx = + υ0 cos α0, υy = + υ0 sin α0.
Подставляя второе из найденных значений t, найдем скорости в момент падения:
υx = + υ0 cos α0, υy = – υ0 sin α0.
Ответ: 1) Парабола 
2) 
3) υx = υ0 cos α0, υy =  υ0 sin α0.
υ0 sin α0.
причем верхний знак соответствует началу движения, а нижний—концу.
Задача №8
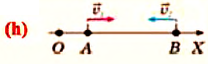
По осям координат (рис. 89) скользят две муфты A и B, соединенные стержнем AB длиной l. Скорость В равна υB.
При каком положении муфт скорость муфты А вдвое больше υB?
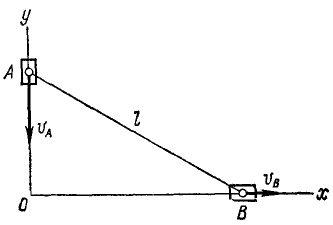
Рис. 89
Решение. Координата точки А связана с координатой точки В соотношением
Считая х и у функциями времени и продифференцировав это равенство по времени, найдем зависимость между скоростями обеих точек:
Но  и по условию надо, чтобы величина
и по условию надо, чтобы величина  была равна 2υB, т. е.
была равна 2υB, т. е.
откуда после алгебраических преобразований получаем ответ.
Ответ:  (см. задачи № 57 и 89, где даны другие решения).
(см. задачи № 57 и 89, где даны другие решения).
Проекция ускорения точки на координатную ось равна первой производной по времени от проекции скорости на ту же ось или второй производной от текущей координаты по времени:

Ускорение проекции и проекция ускорения
Ускорение характеризует изменение скорости точки в данное мгновение. Оно выражается пределом отношения изменения вектора скорости к соответствующему промежутку времени при стремлении этого промежутка времени к нулю.
Для того чтобы определить ускорение точки M при ее движении в пространстве, рассмотрим сначала движение по оси Ox точки Р, являющейся проекцией точки M на эту ось.
Пусть в некоторое мгновение t алгебраическая величина скорости точки P была υх, а в мгновение tl = t + Δt стала υx+∆υx. Тогда ускорение точки P по величине и по знаку выразится пределом
Если знаки υx и ap одинаковы, то движение точки P ускоренное, а если различны, то замедленное.
Аналогично выразятся ускорения проекций Q и R точки M на другие координатные оси:
Проекции υx, υy и υz сами являются производными по времени от координат точки, поэтому ускорения проекций можно выразить вторыми производными по времени от координат точки. Эти равенства характеризуют не только величины, но и знаки ускорений проекций. Иными словами, они выражают изменение алгебраических скоростей проекций P, Q и R в мгновение t.
Только что доказанная теорема о равенстве алгебраической скорости проекции точки на ось и проекции скорости той же точки на ту же ось справедлива для любого момента времени. Следовательно, эта теорема относится не только к скорости, но и к ее изменению в любое мгновение, т. е. к ускорению. Это значит, что написанные выше равенства выражают также проекции ax, ау и аz ускорения а точки M на оси координат Ox, Oy и Oz:
 (65)
(65)
где cosαa, cosβa и cosγa—направляющие косинусы ускорения.
Можно рассматривать эти величины (65) как векторы, направленные по осям координат:
 (65′)
(65′)
Модуль ускорения точки равен квадратному корню из суммы квадратов проекций ускорения на оси координат:
Величина ускорения при координатном способе задания движения точки
Возведем в квадрат каждое из равенств:
и затем сложим их:

откуда
 (66)
(66)
Перед радикалом взят знак плюс, так как модуль вектора—величина положительная. Ускорение точки в отличие от проекций ускорения на оси координат или на другие направления обычно называют полным ускорением. Поэтому равенство (66) можно прочитать так: величина полного ускорения точки равна квадратному корню из суммы квадратов его проекций на оси координат.
Направление ускорения можно определить по направляющим косинусам ускорения:
 ,
, 
Направляющие косинусы ускорения
Направление ускорения определяют по косинусам углов, составляемых положительными направлениями осей координат с вектором ускорения. Формулы направляющих косинусов получаем из уравнений (65):
 (67′)
(67′)
 (67”)
(67”)
 (67”’)
(67”’)
Для определения направления ускорения в каждом конкретном случае надо сначала найти ускорение проекций по (65), для чего необходимо дважды продифференцировать уравнения движения (58), затем найти величину ускорения по (66), а потом определить направляющие косинусы ускорения по (67).
Направление ускорения обычно не совпадает с направлением скорости, и направляющие косинусы (67) ускорения только при прямолинейном ускоренном движении точки постоянно равны направляющим косинусам (62) скорости.
Если точка движется в плоскости хОу, то γa = 90o, cosγa = 0, cosα0 = sin βa.
Задача №9
Точка M движется в системе координат хОу согласно уравнениям х= r cos πt, y=r sinπt, где х и у—в см, a t — в сек. Найти уравнение траектории точки М, ее скорость, направляющие косинусы скорости, ускорение, направляющие косинусы ускорения. Для значений времени t=0; 0,25; 0,5; 0,75, …. 2 сек дать чертежи положений точки M, вектора скорости и вектора ускорения.
Решение. Из уравнения движения видно, что координаты точки M являются проекциями на соответствующие оси радиуса-вектора r, составляющего с осью абсцисс угол πt:

Для определения траектории точки исключаем время из уравнений движения. Получаем уравнение окружности
x2 + y2 = r2
Найдем теперь проекции скорости на оси координат, для чего продифференцируем по времени уравнения движения:
откуда по (64) получаем модуль скорости
Величина скорости точки M постоянна.
Направляющие косинусы скорости определим по формуле (62′):
Эти соотношения показывают, что направление скорости непрерывно меняется и что скорость перпендикулярна радиусу-вектору, проведенному из центра О в точку М.
Ускорение точки M найдем по его проекциям, для чего продифференцируем выражения, полученные для проекций скорости:

откуда по (66) получаем величину ускорения

Ускорение характеризует быстроту изменения вектора скорости не только по величине, но и по направлению, поэтому, несмотря на постоянство модуля скорости точки М, ускорение этой точки не равно нулю. Как видно из полученного
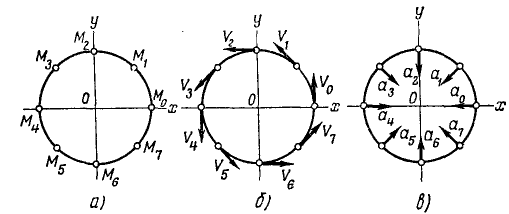
Рис. 90
равенства, величина полного ускорения постоянна. Направление ускорения определим по направляющим косинусам согласно (67):

Направление ускорения точки M противоположно направлению радиуса-вектора.
Положения точки M в различные мгновения показаны на рис. 90, а, векторы скорости — на рис. 90,6 и векторы ускорения — на рис. 90, в.
Ответ. Точка M движется по окружности радиуса r против часовой стрелки с постоянной по величине скоростью υ = rπ и с постоянным по величине ускорением a = rπ2.
Задача №10
Снаряд выбрасывается из орудия с начальной скоростью υ=1600 м/сек под утлом α0 = 55o к горизонту. Определить теоретическую дальность и высоту обстрела, учитывая, что ускорение свободно падающих тел g = 9,81 м/сек2.
Решение. Сначала составим уравнения движения снаряда в координатной форме, направив оси, как показано на чертеже (см. рис. 88), для этого определим проекции ускорения:

Разделив переменные, интегрируем:
υх= С1, υy = – gt + С2
Подставляя вместо переменных величин их начальные значения, увидим, что C1 и C2 равны проекциям начальной скорости:
1600 cos 55o = C1, 1600 sin 55o = – gt + C2.
Подставим их в уравнения, полученные для проекций скорости:
Разделяя переменные и интегрируя, найдем


При t = 0 координаты снаряда были: х =0, у = 0. Подставляя эти данные, найдем, что C3 = O и C4 = O. Значения cos 55° и sin 55° найдем в тригонометрических таблицах. Уравнения движения снаряда примут вид:

Далее поступим, как при решении задачи № 42: приравняв вертикальную скорость нулю, найдем время подъема снаряда (t= 133,7 сек); подставляя это значение t в уравнение движения по оси Оу, найдем теоретическую высоту обстрела (h = 87 636 м); удваивая время /, найдем время полета снаряда (t = 267,4 сек); подставляя это значение- в уравнение движения по оси Ох, найдем теоретическую дальность обстрела (l = 245 393 м).
Ответ. l = 245 км; h = 87,5κм.
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
- Количество движения
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
- Система сил на плоскости
- Естественный и векторный способы определения движения точки
Кинематика

Механика — это раздел физики, изучающий механическое движение тел.
Кинематика — это раздел механики, в котором изучается механическое движение тел без учета причин, вызывающих это движение.
Материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь, если
- расстояние, которое проходит тело, много больше его размера;
- расстояние от данного тела до другого тела много больше его размера;
- тело движется поступательно.
Система отсчета — это тело отсчета, связанная с ним система координат и прибор для измерения времени.
Траектория — это линия, которую описывает тело при своем движении.
Путь — это скалярная величина, равная длине траектории.
Перемещение — это вектор, соединяющий начальное положение тела с его конечным положением за данный промежуток времени.
Важно!
В процессе движения путь может только увеличиваться, а перемещение как увеличиваться, так и уменьшаться, например, когда тело поворачивает обратно.
При прямолинейном движении в одном направлении путь равен модулю перемещения, а при криволинейном — путь больше перемещения.
Перемещение на замкнутой траектории равно нулю.
Основная задача механики — определить положение тела в пространстве в любой момент времени.
Механическое движение и его виды
Механическое движение — это изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение может быть:
1. по характеру движения
- поступательным — это движение, при котором все точки тела движутся одинаково и любая прямая, мысленно проведенная в теле, остается параллельна сама себе;
- вращательным — это движение, при котором все точки твердого тела движутся по окружностям, расположенным в параллельных плоскостях;
- колебательным — это движение, которое повторяется в двух взаимно противоположных направлениях;
2. по виду траектории
- прямолинейным — это движение, траектория которого прямая линия;
- криволинейным — это движение, траектория которого кривая линия;
- равномерным — движение, при котором скорость тела с течением времени не изменяется;
- неравномерным — это движение, при котором скорость тела с течением времени изменяется;
- равноускоренным — это движение, при котором скорость тела увеличивается с течением времени на одну и ту же величину;
- равнозамедленным — это движение, при котором скорость тела уменьшается с течением времени на одну и ту же величину.
Относительность механического движения
Относительность движения — это зависимость характеристик механического движения от выбора системы отсчета.
Правило сложения перемещений
Перемещение тела относительно неподвижной системы отсчета равно векторной сумме перемещения тела относительно подвижной системы отсчета и перемещения подвижной системы отсчета относительно неподвижной системы отсчета:
где ( S ) — перемещение тела относительно неподвижной системы отсчета;
( S_1 ) — перемещение тела относительно подвижной системы отсчета;
( S_2 ) — перемещение подвижной системы отсчета относительно неподвижной системы отсчета.
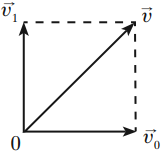
Правило сложения скоростей
Скорость тела относительно неподвижной системы отсчета равна векторной сумме скорости тела относительно подвижной системы отсчета и скорости подвижной системы отсчета относительно неподвижной системы отсчета:
где ( v ) — скорость тела относительно неподвижной системы отсчета;
( v_1 ) — скорость тела относительно подвижной системы отсчета;
( v_2 ) — скорость подвижной системы отсчета относительно неподвижной системы отсчета.
Относительная скорость
Важно! Чтобы определить скорость одного тела относительно другого, надо мысленно остановить то тело, которое мы принимаем за тело отсчета, а к скорости оставшегося тела прибавить скорость остановленного, изменив направление его скорости на противоположное.
Пусть ( v_1 ) — скорость первого тела, а ( v_2 ) — скорость второго тела.
Определим скорость первого тела относительно второго ( v_ <12>) :

Определим скорость второго тела относительно первого ( v_ <21>) :

Следует помнить, что траектория движения тела и пройденный путь тоже относительны.
Если скорости направлены перпендикулярно друг к другу, то относительная скорость рассчитывается по теореме Пифагора:
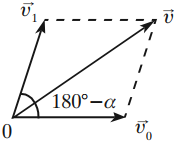
Если скорости направлены под углом ( alpha ) друг к другу, то относительная скорость рассчитывается по теореме косинусов:

Скорость
Скорость — это векторная величина, характеризующая изменение перемещения данного тела относительно тела отсчета с течением времени.
Обозначение — ( v ) , единицы измерения — м/с (км/ч).

Средняя скорость — это векторная величина, равная отношению всего перемещения к промежутку времени, за которое это перемещение произошло:

Средняя путевая скорость — это скалярная величина, равная отношению всего пути, пройденного телом, к промежутку времени, за которое этот путь пройден:

Важно! Чтобы определить среднюю скорость на всем участке пути, надо время разделить на отдельные промежутки и все время представить в виде суммы этих промежутков.
Чтобы определить среднюю скорость за все время движения, надо путь разделить на отдельные участки и весь путь представить как сумму этих участков.
Мгновенная скорость — это скорость тела в данный момент времени или в данной точке траектории.
Мгновенная скорость направлена по касательной к траектории движения.
Ускорение
Ускорение – это векторная физическая величина, характеризующая быстроту изменения скорости.
Обозначение — ( a ) , единица измерения — м/с 2 .
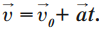
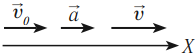
В векторном виде:

где ( v ) – конечная скорость; ( v_0 ) – начальная скорость;
( t ) – промежуток времени, за который произошло изменение скорости.
В проекциях на ось ОХ:
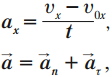
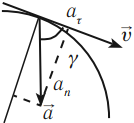
где ( a_n ) – нормальное ускорение, ( a_ <tau>) – тангенциальное ускорение.
Тангенциальное ускорение сонаправлено с вектором линейной скорости, а значит, направлено вдоль касательной к кривой:

Нормальное ускорение перпендикулярно направлению вектора линейной скорости, а значит, и касательной к кривой:

Ускорение характеризует быстроту изменения скорости, а скорость – векторная величина, которая имеет модуль (числовое значение) и направление.
Важно!
Тангенциальное ускорение характеризует быстроту изменения модуля скорости. Нормальное ускорение характеризует быстроту изменения направления скорости.
Если ( a_ <tau>) ≠ 0, ( a_n ) = 0, то тело движется по прямой;
если ( a_ <tau>) = 0, ( a_n ) = 0, ( v ) ≠ 0, то тело движется равномерно по прямой;
если ( a_ <tau>) = 0, ( a_n ) ≠ 0, тело движется равномерно по кривой;
если ( a_ <tau>) = 0, ( a_n ) = const, то тело движется равномерно по окружности;
если ( a_ <tau>) ≠ 0, ( a_n ) ≠ 0, то тело движется неравномерно по окружности.
Равномерное движение
Равномерное движение – это движение, при котором тело за любые равные промежутки времени совершает равные перемещения.
Скорость при равномерном движении – величина, равная отношению перемещения к промежутку времени, за которое это перемещение произошло:
Проекция вектора скорости на ось ОХ:
Проекция вектора скорости на координатную ось равна быстроте изменения данной координаты:
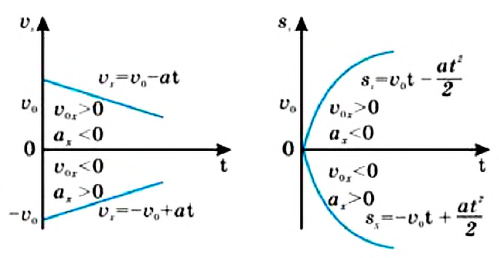
График скорости (проекции скорости)
График скорости (проекции скорости) представляет собой зависимость скорости от времени:
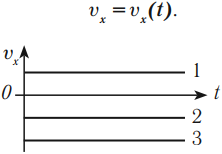
График скорости при равномерном движении – прямая, параллельная оси времени.
График 1 лежит над осью ( t ) , тело движется по направлению оси ОХ.
Графики 2 и 3 лежат под осью ( t ) , тело движется против оси ОХ.
Перемещение при равномерном движении – это величина, равная произведению скорости на время:

Проекция вектора перемещения на ось ОХ:

График перемещения (проекции перемещения)
График перемещения (проекции перемещения) представляет собой зависимость перемещения от времени:
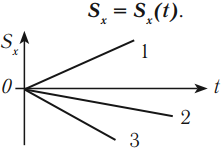
График перемещения при равномерном движении – прямая, выходящая из начала координат.
График 1 лежит над осью ( t ) , тело движется по направлению оси ОХ.
Графики 2 и 3 лежат под осью ( t ) , тело движется против оси ОХ.
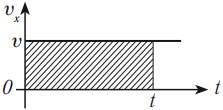
По графику зависимости скорости от времени можно определить перемещение, пройденное телом за время ( t ) . Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Координата тела при равномерном движении рассчитывается по формуле:
График координаты представляет собой зависимость координаты от времени: ( x=x(t) ) .
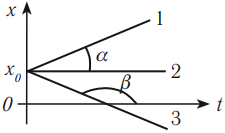
График координаты при равномерном движении – прямая.
График 1 направлен вверх, тело движется по направлению оси ОХ:

График 2 параллелен оси ОХ, тело покоится.
График 3 направлен вниз, тело движется против оси ОХ:

Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение – это движение по прямой, при котором тело движется с постоянным ускорением:

При движении с ускорением скорость может как увеличиваться, так и уменьшаться.
Скорость тела при равноускоренном движении рассчитывается по формуле:
При разгоне (в проекциях на ось ОХ):

При торможении (в проекциях на ось ОХ):

График ускорения (проекции ускорения) при равноускоренном движении представляет собой зависимость ускорения от времени:
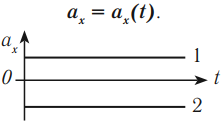
График ускорения при равноускоренном движении – прямая, параллельная оси времени.
График 1 лежит над осью t, тело разгоняется, ( a_x ) > 0.
График 2 лежит под осью t, тело тормозит, ( a_x ) ( v_ <0x>) > 0, ( a_x ) > 0.

График 2 направлен вниз, тело движется равнозамедленно в положительном направлении оси ОХ, ( v_ <0x>) > 0, ( a_x ) ( v_ <0x>) ( a_x ) ( t_2-t_1 ) . Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Перемещение при равноускоренном движении рассчитывается по формулам:
Перемещение в ( n ) -ую секунду при равноускоренном движении рассчитывается по формуле:
Координата тела при равноускоренном движении рассчитывается по формуле:
Свободное падение (ускорение свободного падения)
Свободное падение – это движение тела в безвоздушном пространстве под действием только силы тяжести.
Все тела при свободном падении независимо от массы падают с одинаковым ускорением, называемым ускорением свободного падения.
Ускорение свободного падения всегда направлено к центру Земли (вертикально вниз).
Обозначение – ( g ) , единицы измерения – м/с 2 .
Важно! ( g ) = 9,8 м/с 2 , но при решении задач считается, что ( g ) = 10 м/с 2 .
Движение тела по вертикали
Тело падает вниз, вектор скорости направлен в одну сторону с вектором ускорения свободного падения:

Если тело падает вниз без начальной скорости, то ( v_0 ) = 0.
Время падения рассчитывается по формуле:

Тело брошено вверх:

Если брошенное вверх тело достигло максимальной высоты, то ( v ) = 0.
Время подъема рассчитывается по формуле:

Движение тела, брошенного горизонтально
Движение тела, брошенного горизонтально, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали со скоростью ( v_0=v_ <0x>) ;
- равноускоренного движения по вертикали с ускорением свободного падения ( g ) и без начальной скорости ( v_<0y>=0 ) .


Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
Движение тела, брошенного под углом к горизонту (баллистическое движение)
Движение тела, брошенного под углом к горизонту, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали;
- равноускоренного движения по вертикали с ускорением свободного падения.

Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
Время подъема на максимальную высоту:

Максимальная высота подъема:
Максимальная дальность полета:
Важно!
При движении вверх вертикальная составляющая скорости будет уменьшаться, т. е. тело вдоль вертикальной оси движется равнозамедленно.
При движении вниз вертикальная составляющая скорости будет увеличиваться, т. е. тело вдоль вертикальной оси движется равноускоренно.
Скорость ( v_0 ) , с которой тело брошено с Земли, будет равна скорости, с которой оно упадет на Землю. Угол ( alpha ) , под которым тело брошено, будет равен углу, под которым оно упадет.
При решении задач на движение тела, брошенного под углом к горизонту, важно помнить, что в точке максимального подъема проекция скорости на ось ОУ равна нулю:

Это облегчает решение задач:

Движение по окружности с постоянной по модулю скоростью
Движение по окружности с постоянной по модулю скоростью – простейший вид криволинейного движения.
Траектория движения – окружность. Вектор скорости направлен по касательной к окружности.
Модуль скорости тела с течением времени не изменяется, а ее направление при движении по окружности в каждой точке изменяется, поэтому движение по окружности – это движение с ускорением.
Ускорение, которое изменяет направление скорости, называется центростремительным.
Центростремительное ускорение направлено по радиусу окружности к ее центру.
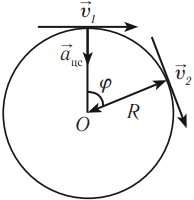
Центростремительное ускорение – это ускорение, характеризующее быстроту изменения направления вектора линейной скорости.
Обозначение – ( a_ <цс>) , единицы измерения – м/с 2 .

Движение тела по окружности с постоянной по модулю скоростью является периодическим движением, т. е. его координата повторяется через равные промежутки времени.
Период – это время, за которое тело совершает один полный оборот.
Обозначение – ( T ) , единицы измерения – с.

где ( N ) – количество оборотов, ( t ) – время, за которое эти обороты совершены.
Частота вращения – это число оборотов за единицу времени.
Обозначение – ( nu ) , единицы измерения – с –1 (Гц).

Период и частота – взаимно обратные величины:
Линейная скорость – это скорость, с которой тело движется по окружности.
Обозначение – ( v ) , единицы измерения – м/с.
Линейная скорость направлена по касательной к окружности:

Угловая скорость – это физическая величина, равная отношению угла поворота к времени, за которое поворот произошел.
Обозначение – ( omega ) , единицы измерения – рад/с .

Направление угловой скорости можно определить по правилу правого винта (буравчика).
Если вращательное движение винта совпадает с направлением движения тела по окружности, то поступательное движение винта совпадает с направлением угловой скорости.
Связь различных величин, характеризующих движение по окружности с постоянной по модулю скоростью:

Важно!
При равномерном движении тела по окружности точки, лежащие на радиусе, движутся с одинаковой угловой скоростью, т. к. радиус за одинаковое время поворачивается на одинаковый угол. А вот линейная скорость разных точек радиуса различна в зависимости от того, насколько близко или далеко от центра они располагаются:

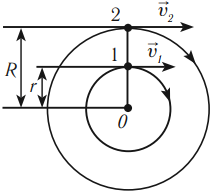
Если рассматривать равномерное движение двух сцепленных тел, то в этом случае одинаковыми будут линейные скорости, а угловые скорости тел будут различны в зависимости от радиуса тела:

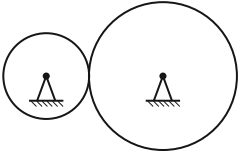
Когда колесо катится равномерно по дороге, двигаясь относительно нее с линейной скоростью ( v_1 ) , и все точки обода колеса движутся относительно его центра с такой же линейной скоростью ( v_1 ) , то относительно дороги мгновенная скорость разных точек колеса различна.
Мгновенная скорость нижней точки ( (m) ) равна нулю, мгновенная скорость в верхней точке ( (n) ) равна удвоенной скорости ( v_1 ) , мгновенная скорость точки ( (p) ) , лежащей на горизонтальном радиусе, рассчитывается по теореме Пифагора, а мгновенная скорость в любой другой точке ( (c) ) – по теореме косинусов.
Равномерное прямолинейное движение в физике – формулы и определения с примерами
Содержание:
Равномерное прямолинейное движение:
Вы изучали равномерное прямолинейное движение, познакомились с понятием «скорость». Скалярной или векторной величиной является скорость? Каковы закономерности равномерного прямолинейного движения?
Вы знаете, что движение, при котором за любые равные промежутки времени тело проходит одинаковые пути, называется равномерным. В каком случае одинаковыми будут не только пути, но и перемещения?
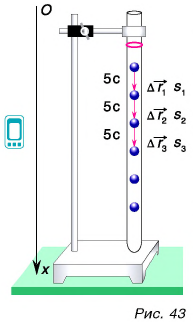
Проделаем опыт. Проследим за падением металлического шарика в вертикальной трубке, заполненной вязкой жидкостью (например, густым сахарным сиропом) (рис. 43). Будем отмечать положение шарика через равные промежутки времени. Опыт показывает, что за равные промежутки времени, например за 
Сделаем вывод. При равномерном прямолинейном движении тело за любые равные промежутки времени совершает одинаковые перемещения и проходит одинаковые пути.
В 7-м классе вы находили скорость равномерного движения тела как отношение пути к промежутку времени, за который путь пройден:  Это отношение показывает, как быстро движется тело, но ничего не говорит о направлении движения. Чтобы скорость характеризовала и быстроту движения, и его направление, ее определяют через перемещение.
Это отношение показывает, как быстро движется тело, но ничего не говорит о направлении движения. Чтобы скорость характеризовала и быстроту движения, и его направление, ее определяют через перемещение.
Скорость равномерного прямолинейного движения — это величина, равная отношению перемещения к промежутку времени, за который оно совершено:

Из равенства (1) следует, что скорость  — векторная физическая величина. Ее модуль численно равен модулю перемещения за единицу времени, а направление совпадает с направлением перемещения (т. к.
— векторная физическая величина. Ее модуль численно равен модулю перемещения за единицу времени, а направление совпадает с направлением перемещения (т. к.  ).
).
Отношение  для всех участков движения на рисунке 43 одинаково:
для всех участков движения на рисунке 43 одинаково:  Значит, скорость
Значит, скорость  равномерного прямолинейного движения постоянна: с течением времени не изменяется ни ее модуль, ни ее направление.
равномерного прямолинейного движения постоянна: с течением времени не изменяется ни ее модуль, ни ее направление.
Из формулы (1) легко найти перемещение:

и путь  (равный модулю перемещения
(равный модулю перемещения  ):
):

А как определить положение равномерно и прямолинейно движущегося тела в любой момент времени  Рассмотрим пример. Автомобиль движется с постоянной скоростью по прямолинейному участку шоссе (рис. 44).
Рассмотрим пример. Автомобиль движется с постоянной скоростью по прямолинейному участку шоссе (рис. 44).
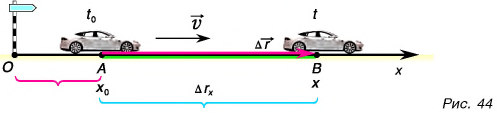
Автомобиль рассматриваем как материальную точку. Из формулы (2) находим проекцию перемещения автомобиля на ось Ох:

Согласно рисунку 44 за время  автомобиль совершил перемещение
автомобиль совершил перемещение  Подставляя
Подставляя  в равенство (4), получим:
в равенство (4), получим:

Приняв  запишем формулу для координаты автомобиля:
запишем формулу для координаты автомобиля:

Координата равномерно и прямолинейно движущегося тела линейно зависит от времени.
Зависимость координаты движущегося тела от времени называется кинематическим законом движения. Формула (5) выражает кинематический закон равномерного прямолинейного движения.

Для измерения скорости используются специальные приборы. В автомобилях имеется спидометр (рис. 45), на самолетах — указатель скорости. Эхолокаторы измеряют скорость тел, движущихся под водой, а радиолокаторы (радары) — в воздухе и по земле. Сотрудники службы дорожного движения с помощью портативного радара с видеокамерой (рис. 46) регистрируют скорость транспортных средств.

Для любознательных:
Скорости движения могут сильно отличаться. За одну секунду черепаха может преодолеть несколько сантиметров, человек — до 10 м, гепард — до 30 м, гоночный автомобиль — около 100 м.

Около 8 км за секунду пролетает по орбите спутник Земли (рис. 47). Но даже скорости космических кораблей «черепашьи» по сравнению со скоростью микрочастиц в ускорителях. В современном ускорителе (рис. 48) электрон за одну секунду пролетает почти 300 000 км!
Главные выводы:
- При равномерном прямолинейном движении за любые равные промежутки времени тело совершает одинаковые перемещения.
- Скорость равномерного прямолинейного движения постоянна: с течением времени не изменяется ни ее модуль, ни ее направление.
- При равномерном прямолинейном движении тела модуль перемещения равен пути, пройденному за тот же промежуток времени.
- Координата равномерно и прямолинейно движущегося тела линейно зависит от времени.
Пример решения задачи:
Кинематический закон прямолинейного движения лодки но озеру вдоль оси Ох задан уравнением  где
где 
Определите: 1) проекцию скорости лодки  2) координату лодки
2) координату лодки  в момент времени
в момент времени  3) проекцию перемещения
3) проекцию перемещения  лодки на ось Ох и путь, пройденный лодкой за время от момента
лодки на ось Ох и путь, пройденный лодкой за время от момента  до момента
до момента 

Решение
Сделаем рисунок к задаче.

По условию задачи координата лодки линейно зависит от времени. Значит, лодка движется равномерно. Сравнив 
 получим
получим


Найдем 
Из рисунка 49: проекция перемещения 

Ответ: 
Графическое представление равномерного прямолинейного движения
Зависимости между различными величинами можно наглядно изобразить с помощью графиков. Использование графиков облегчает решение научных, практических задач и даже бытовых проблем.
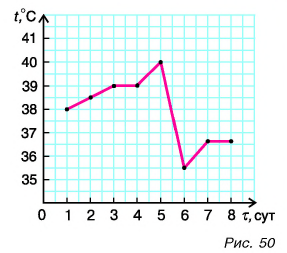
Например, по графику зависимости температуры пациента от времени (рис. 50) видно, что на 5-е сутки температура достигла своего максимума, затем резко упала, а еще через сутки стала приближаться к норме. График дал наглядное представление о течении болезни.
В физике роль графиков чрезвычайно велика. Умение строить и читать графики помогает быстрее и глубже понять физические явления.
Рассмотрим простой пример из кинематики. Леша и Таня идут навстречу друг другу (рис. 51). Они движутся равномерно и прямолинейно. Модуль скорости Леши  Тани
Тани  Как представить графически характеристики их движения?
Как представить графически характеристики их движения?
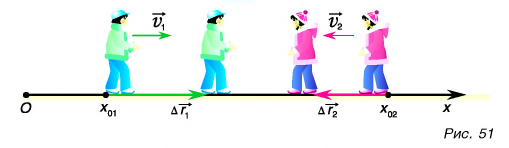
Выберем координатную ось Ох и зададим начальные положения участников движения (см. рис. 51). Пусть при  координата Леши
координата Леши  Тани
Тани 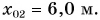
Построим графики зависимости проекции скорости  проекции перемещения
проекции перемещения  пути S и координаты X от времени t.
пути S и координаты X от времени t.
График проекции скорости
Согласно условию и рисунку 52 для проекций скорости движения Тани и Леши на ось Ох получим:  Так как проекции
Так как проекции  постоянны, то графики их зависимости от времени t — прямые, параллельные оси времени (прямые I и II на рисунке 52).
постоянны, то графики их зависимости от времени t — прямые, параллельные оси времени (прямые I и II на рисунке 52).
Графики показывают: проекция скорости при равномерном прямолинейном движении с течением времени не изменяется.
График проекции перемещения
Проекция перемещения  совершенного за время t, определяется формулой
совершенного за время t, определяется формулой  (см. § 6).
(см. § 6).
Зависимость проекции перемещения от времени для Леши  или
или  График
График  — наклонная прямая I (рис. 53).
— наклонная прямая I (рис. 53).
Для Тани  или
или  График
График  — наклонная прямая II, изображенная на рисунке 53.
— наклонная прямая II, изображенная на рисунке 53.
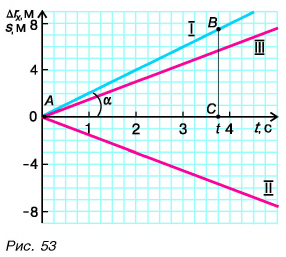
Из графиков и формул следует, что при равномерном прямолинейном движении проекция перемещения прямо пропорциональна времени.
График пути
Путь — величина положительная при любом движении тела. При равномерном прямолинейном движении путь равен модулю перемещения:  Поэтому при
Поэтому при  график пути совпадает с графиком проекции перемещения (прямая I), а при
график пути совпадает с графиком проекции перемещения (прямая I), а при  график пути (прямая III) является «зеркальным отражением» графика II (проекции перемещения) от оси времени.
график пути (прямая III) является «зеркальным отражением» графика II (проекции перемещения) от оси времени.
Графики пути показывают: при равномерном прямолинейном движении пройденный путь прямо пропорционален времени.
График координаты
Его называют также графиком движения.
По формуле  , используя данные из условия задачи и рисунок 51, находим зависимости координаты
, используя данные из условия задачи и рисунок 51, находим зависимости координаты  Леши и
Леши и  Тани от времени
Тани от времени 
 Графики этих зависимостей — прямые I и II на рисунке 54. Они параллельны соответствующим графикам проекций перемещения на рисунке 53.
Графики этих зависимостей — прямые I и II на рисунке 54. Они параллельны соответствующим графикам проекций перемещения на рисунке 53.
Графики движения показывают: при равномерном прямолинейном движении координата тела линейно зависит от времени.
По точке пересечения графиков I и II (точке А) (рис. 54) легко найти момент и координату места встречи Леши и Тани. Определите их самостоятельно.
Что еще можно определить по графикам?
По графику проекции скорости можно найти проекцию перемещения и пройденный путь
Рассмотрим прямоугольник ABCD на рисунке 52. Его высота численно равна  а основание — времени t. Значит, площадь прямоугольника равна
а основание — времени t. Значит, площадь прямоугольника равна  Таким образом, проекция перемещения численно равна площади прямоугольника между графиком проекции скорости и осью времени. При
Таким образом, проекция перемещения численно равна площади прямоугольника между графиком проекции скорости и осью времени. При  проекция перемещения отрицательна, и площадь надо брать со знаком «минус».
проекция перемещения отрицательна, и площадь надо брать со знаком «минус».
Докажите самостоятельно, что площадь между графиком проекции скорости и осью времени численно равна пройденному пути.
По углу наклона графика проекции перемещения можно оценить скорость движения
Рассмотрим треугольник АВС на рисунке 53. Чем больше угол наклона а графика проекции перемещения, тем больше скорость тела. Объясните это самостоятельно.
Главные выводы:
Для равномерного прямолинейного движения:
- График проекции скорости — прямая, параллельная оси времени.
- Графики проекции перемещения и координаты — прямые, наклон которых к оси времени определяется скоростью движения.
- Площадь фигуры между графиком проекции скорости и осью времени определяет проекцию перемещения.
Пример №1
Мотоциклист едет из города по прямолинейному участку шоссе с постоянной скоростью  Через время
Через время  после проезда перекрестка он встречает едущего в город велосипедиста, движущегося равномерно со скоростью
после проезда перекрестка он встречает едущего в город велосипедиста, движущегося равномерно со скоростью  Определите расстояние между участниками движения через время
Определите расстояние между участниками движения через время  после их встречи, если
после их встречи, если  Запишите кинематические законы движения мотоциклиста и велосипедиста, постройте графики проекции и модуля скорости, проекции перемещения, координаты и пути для обоих участников движения.
Запишите кинематические законы движения мотоциклиста и велосипедиста, постройте графики проекции и модуля скорости, проекции перемещения, координаты и пути для обоих участников движения.
Решение
Изобразим координатную ось Ох, вдоль которой идет движение (рис. 55). Начало системы координат О свяжем с перекрестком.

В начальный момент времени мотоциклист находился на перекрестке, а велосипедист в точке В. Значит, кинематический закон движения мотоциклиста имеет вид:

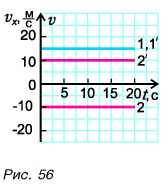
Найдем координату  велосипедиста в начальный момент времени. Пусть точка С на оси Ох — место встречи участников движения (рис. 56).
велосипедиста в начальный момент времени. Пусть точка С на оси Ох — место встречи участников движения (рис. 56).

Кинематический закон движения велосипедиста имеет вид:

Расстояние между мотоциклистом и велосипедистом через время  после их встречи равно сумме путей, которые они проделают за это время. Значит,
после их встречи равно сумме путей, которые они проделают за это время. Значит,

Пример №2
Построим графики проекций и модулей скорости. Для мотоциклиста графики проекции скорости 1 и модуля скорости  совпадают (рис. 56). Для велосипедиста график проекции скорости — прямая 2, а модуля скорости — прямая
совпадают (рис. 56). Для велосипедиста график проекции скорости — прямая 2, а модуля скорости — прямая  Объясните причину несовпадения.
Объясните причину несовпадения.
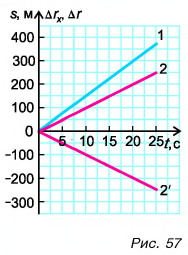
Графиками пути s, проекции  и модуля перемещения
и модуля перемещения  (рис. 57) будут прямые, выражающие прямую пропорциональную зависимость от времени t.
(рис. 57) будут прямые, выражающие прямую пропорциональную зависимость от времени t.

Графики пути, модуля и проекции перемещения мотоциклиста совпадают (прямая 1).

Прямая 2 является графиком пути и модуля перемещения велосипедиста. Прямая  — графиком проекции его перемещения.
— графиком проекции его перемещения.
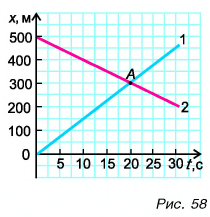
Графики координат представлены на рисунке 58. Они выражают зависимости  (прямая 1) и
(прямая 1) и  (прямая 2). Точка А определяет время встречи и координату места встречи.
(прямая 2). Точка А определяет время встречи и координату места встречи.
Ответ: 
Прямолинейное равномерное движение и скорость
Из курса Физики VII класса вам известно, что равномерное прямолинейное движение является самым простым видом механического движения.
Прямолинейное равномерное движение — это движение по прямой линии, при котором материальная точка за равные промежутки времени совершает одинаковые перемещения.
При прямолинейном равномерном движении модуль и направление скорости с течением времени не изменяются:
Скорость при прямолинейном равномерном движении является постоянной физической величиной, равной отношению перемещения материальной точки ко времени, за которое это перемещение было совершено: 
Так как отношение  в формуле является положительной скалярной величиной, то направление вектора скорости
в формуле является положительной скалярной величиной, то направление вектора скорости  совпадает с направлением вектора перемещения
совпадает с направлением вектора перемещения  Единица измерения скорости в СИ – метр в секунду:
Единица измерения скорости в СИ – метр в секунду:

Если скорость известна, то можно определить перемещение s материальной точки за промежуток времени  при прямолинейном равномерном движении:
при прямолинейном равномерном движении:

При прямолинейном равномерном движении пройденный телом путь равен модулю перемещения:

Так как уравнение в векторном виде можно заменить алгебраическими уравнениями в проекциях векторов, то для вычисления перемещения используют не формулу, выраженную через векторы, а формулу, содержащую в себе проекции векторов на координатные оси. При прямолинейном движении положение материальной точки определяется одной координатой X, определяются проекции векторов скорости и перемещения материальной точки на эту ось и уравнение решается в этих проекциях. Поэтому выражение (1.2) можно записать в проекциях перемещения и скорости на ось ОХ:

Можно получить формулу для вычисления координаты точки  в произвольный момент времени (см.: тема 1.2):
в произвольный момент времени (см.: тема 1.2):

Выражение (1.5) является уравнением прямолинейного равномерного движения тела. Если материальная точка движется по направлению выбранной координатной оси ОХ, то проекция скорости считается положительной (b), если же движется против направления координатной оси, то проекция скорости считается отрицательной (с).
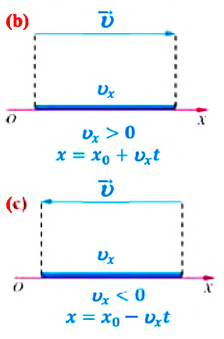
Из формулы (1.5) определяется выражение для проекции скорости:
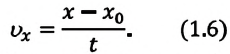
Из формулы (1.6) становится ясным физический смысл скорости: проекция скорости на ось равна изменению проекции соответствующей координаты за единицу времени.
Пройденный путь и координата материальной точки при прямолинейном равномерном движении являются линейной функцией от времени (d). Скорость же является постоянной величиной, поэтому график скорость – время будет представлять собой линию, параллельную оси времени — скорость такого движения не зависит от времени (е):
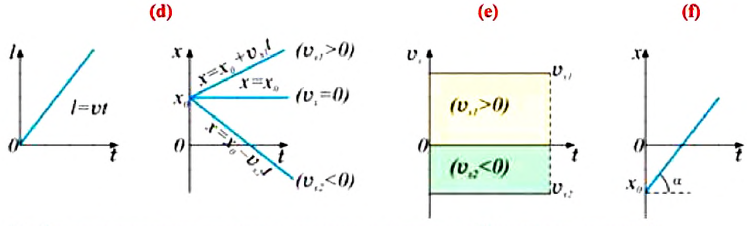
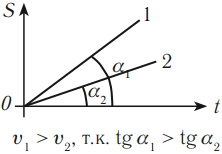
График координата-время при равномерном движении образует определенный угол с осью времени. Тангенс этого угла равен проекции (модулю) скорости по оси ох (f): 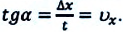
Пример №3
Два велосипедиста одновременно начали движение навстречу друг другу вдоль прямой линии из пунктов А и В, расстояние между которыми 90 км. Скорость первого велосипедиста  скорость второго велосипедиста
скорость второго велосипедиста  (g)?
(g)?
Определите: а) координату и время  встречи велосипедистов; b) пройденные велосипедистами пути и совершенные ими перемещения к моменту встречи; с) время
встречи велосипедистов; b) пройденные велосипедистами пути и совершенные ими перемещения к моменту встречи; с) время  прошедшее с начала движения до момента, когда расстояние между ними стало 10 км.
прошедшее с начала движения до момента, когда расстояние между ними стало 10 км.

a) При решении задачи соблюдается следующая последовательность действий:
I действие. Выбирается система координат ОХ с началом координат в точке А и рисуется схема (h).
II действие. Уравнение движения записывается в общем виде: 
III действие. На основании условия задачи уравнения движения велосипедистов записываются в общем виде: 
IV действие. Координаты велосипедистов при встрече равны:  Это равенство решается для
Это равенство решается для 

V действие. Для определения координат  и
и  встречи велосипедистов необходимо решить уравнения их движения для времени
встречи велосипедистов необходимо решить уравнения их движения для времени 

Так как  то
то 
b) Так как по условию задачи велосипедисты движутся прямолинейно и без изменения направления движения, то пройденный путь равен проекции (модулю) перемещения:

c) Время  прошедшее с начала движения до момента, когда между ними осталось 10 км, вычисляется по нижеприведенному равенству:
прошедшее с начала движения до момента, когда между ними осталось 10 км, вычисляется по нижеприведенному равенству:
 или
или 
Скорость при равнопеременном прямолинейном движении
Из формулы (1.14) видно, что если известны ускорение  и начальная скорость тела
и начальная скорость тела  то можно определить его скорость в любой момент времени:
то можно определить его скорость в любой момент времени:

или ее проекцию на ось 

Если начальная скорость равна нулю 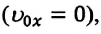 то:
то:

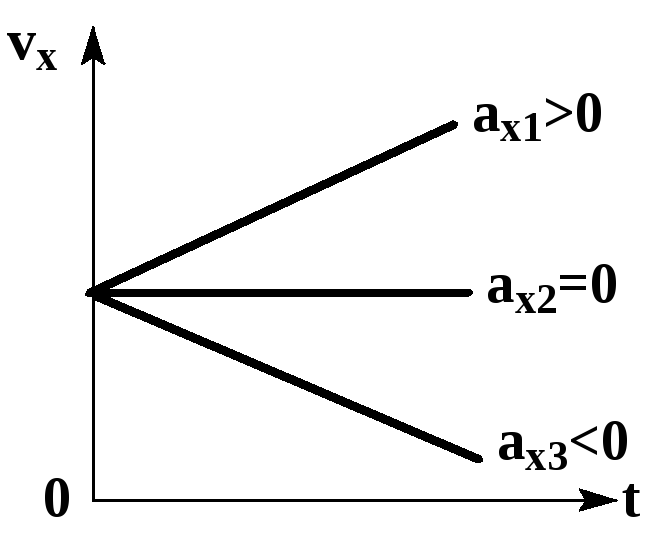
Из этих выражений видно, что скорость при равнопеременном движении является линейной функцией от времени. График зависимости скорости от времени – прямая линия, проходящая через начало координат (или через  Эта линия, в соответствии с увеличением или уменьшением скорости, направлена вверх или вниз (с).
Эта линия, в соответствии с увеличением или уменьшением скорости, направлена вверх или вниз (с).
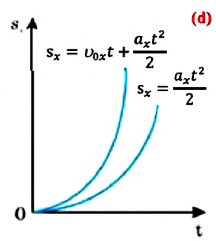
Перемещение при равнопеременном прямолинейном движении
Формулу для определения перемещения при равнопеременном движении можно вывести на основе графика скорость-время. Проекция перемещения равна площади фигуры между графиком  и осью времени.
и осью времени.
На приведенных графиках — это заштрихованная фигура трапеции (см: с):

или в векторной форме:
Если в последнюю формулу вместо  подставить выражение (1.18), то получим
подставить выражение (1.18), то получим
обобщенную формулу перемещения для равнопеременного движения:
Таким образом, формула проекции перемещения (например, на ось  при равнопеременном прямолинейном движении будет:
при равнопеременном прямолинейном движении будет:

а формула координаты:

(1.23) является формулой перемещения при равнопеременном движении в векторной форме, а (1.24) и (1.25) обобщенными формулами координаты и проекции перемещения, соответственно. Если материальная точка начинает движение из состояния покоя  то:
то:
Как видно из формулы, проекция перемещения при прямолинейном равнопеременном движении пропорциональна квадрату времени  и его график представляет собой параболу, проходящую через начало координат (d).
и его график представляет собой параболу, проходящую через начало координат (d).
В некоторых случаях возникает необходимость определить перемещение материальной точки, не зная время  прошедшее от начала движения. Такую задачу можно решить тогда, когда известны ускорение, начальное и конечное значения скорости. Для получения этой формулы из выражения (1.19) получаем
прошедшее от начала движения. Такую задачу можно решить тогда, когда известны ускорение, начальное и конечное значения скорости. Для получения этой формулы из выражения (1.19) получаем 
Это выражение подставляется в формулу (1.21):
После простых преобразований получаем:

Для проекции конечной скорости получаем:  Если движение начинается из состояния покоя
Если движение начинается из состояния покоя  то проекции перемещения и скорости будут равны:
то проекции перемещения и скорости будут равны:
Равноускоренное и равнозамедленное движения
Равнопеременное движение по характеру может быть или равноускоренным, или же равнозамедленным.
При равноускоренном движении векторы  и
и  имеют одинаковые направления. В этом случае знаки у обеих проекций
имеют одинаковые направления. В этом случае знаки у обеих проекций  и
и  или положительные, или же отрицательные. Если материальная точка начнет движение из состояния покоя
или положительные, или же отрицательные. Если материальная точка начнет движение из состояния покоя  то независимо от направления движения, оно во всех случаях будет равноускоренным.
то независимо от направления движения, оно во всех случаях будет равноускоренным.
При равнозамедленном движении векторы  и имеют противоположные направления. В этом случае проекции
и имеют противоположные направления. В этом случае проекции  и
и  имеют противоположные знаки, если один из них отрицательный, то другой – положительный.
имеют противоположные знаки, если один из них отрицательный, то другой – положительный.
В таблице 1.3 даны формулы и соответствующие графики равноускоренного и равнозамедленного прямолинейного движения.
Примечание: так как  то отношение проекций перемещения равно отношению квадратов соответствующих промежутков времени:
то отношение проекций перемещения равно отношению квадратов соответствующих промежутков времени:

Это соотношение иногда называется “правило путей”.
Кинематика прямолинейного движения
Физические величины бывают скалярные и векторные. Скалярные физические величины характеризуются только численным значением, тогда как векторные определяются и числом (модулем), и направлением. Скалярными физическими величинами являются время, температура, масса, векторными — скорость, ускорение, сила.
Мир вокруг нас непрерывно изменяется, или движется, т. е. можно сказать, что движение (изменение) есть способ существования материи.
Простейшая форма движения материи — механическое движение — заключается в изменении взаимного расположения тел или их частей в пространстве с течением времени. Наука, изучающая механическое движение, называется механикой (от греческого слова  — подъемная машина).
— подъемная машина).
Даже самое простое движение тела оказывается достаточно сложным для изучения и исследования. Соответственно, для того чтобы в сложном явлении «увидеть» главное, в физике строится его адекватная упрощенная модель.
В механике широко используется простейшая модель реального тела, называемая материальной точкой (МТ). Под материальной точкой понимают тело, размерами и формой которого можно пренебречь при описании данного движения. Хотя МТ представляет собой абстрактное понятие, упрощающее изучение многих физических явлений, она, подобно реальному телу, «имеет» массу, энергию и т. д.
Кроме материальной точки, в механике используется модель абсолютно твердого тела. Под абсолютно твердым телом понимают модель реального тела, в которой расстояние между его любыми двумя точками остается постоянным. Это означает, что размеры и форма абсолютно твердого тела не изменяются в процессе его движения. В противном случае говорят о модели деформируемого тела.
В классической (ньютоновской) механике рассматривается движение тел со скоростями, намного меньшими скорости света в вакууме
Классическая механика состоит из трех основных разделов: кинематики, динамики и статики. В кинематике (от греческого слова  — движение) изучается механическое движение тел без учета их масс и действующих на них сил. В динамике (от греческого слова
— движение) изучается механическое движение тел без учета их масс и действующих на них сил. В динамике (от греческого слова  — сила) рассматривается влияние взаимодействия между телами на их движение. В статике (от греческого слова
— сила) рассматривается влияние взаимодействия между телами на их движение. В статике (от греческого слова  — искусство взвешивать) исследуются законы сложения сил и условия равновесия твердых, жидких и газообразных тел.
— искусство взвешивать) исследуются законы сложения сил и условия равновесия твердых, жидких и газообразных тел.
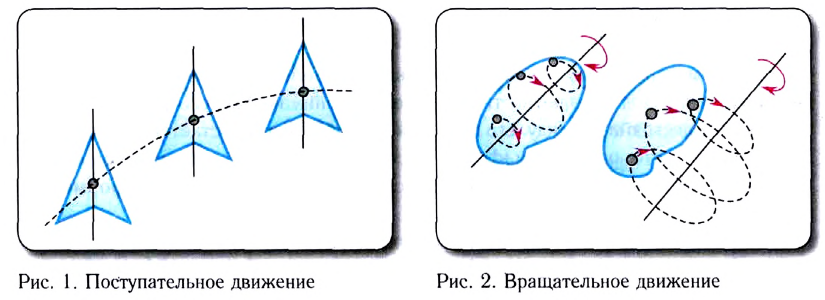
Всякое движение тела можно представить в виде двух основных видов движения — поступательного и вращательного.
Поступательным называется движение тела, при котором прямая, соединяющая в этом теле любые две точки, при перемещении остается параллельной самой себе (рис. 1).
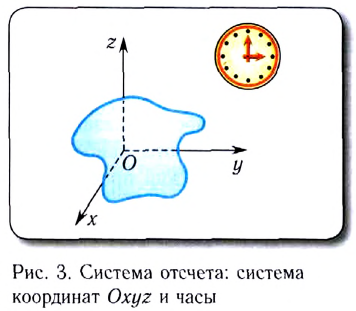
Вращательным называется движение абсолютно твердого тела вокруг неподвижной прямой, называемой осью вращения, при котором все точки тела движутся по окружностям, центры которых лежат на этой оси (рис. 2).
Основными задачами кинематики являются:
описание совершаемого телом движения с помощью математических формул, графиков или таблиц;
определение кинематических характеристик движения (перемещения, скорости, ускорения).
Движение тела можно описать только относительно какого-либо другого тела. Тело, относительно которого рассматривается исследуемое движение, называют телом отсчета (ТО). Для описания движения используются формулы, графики и таблицы, выражающие зависимость координат, скоростей и ускорений от времени.
Основным свойством механического движения является его относительность: характер движения тела зависит от выбора системы отсчета (СО).
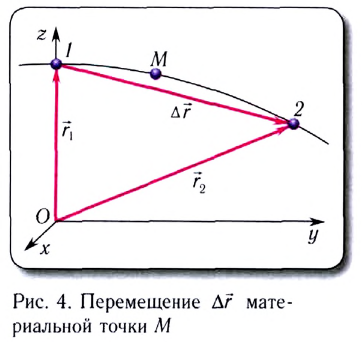
Систему отсчета, выбираемую для описания того или иного движения, образуют: тело отсчета, связанные с ним система координат (СК) и прибор для измерения времени (часы) (рис. 3).
Система координат и часы необходимы для того, чтобы знать, как с течением времени изменяется положение тела относительно выбранного тела отсчета.
Для описания движения материальной точки в пространстве вводятся такие понятия, как траектория, перемещение, путь.
Линию, которую описывает материальная точка в процессе движения по отношению к выбранной СО, называют траекторией (от латинского слова trajectorus — относящийся к перемещению). Если траектория является прямой линией, то движение называется прямолинейным, в противном случае — криволинейным.
Длина участка траектории, пройденного МТ в процессе движения, называется путем (s).
Термин «скаляр», происходящий от латинского слова scalarus — ступенчатый, введен У. Гамильтоном в 1843 г.
Термин «вектор» произошел от латинского слова vector — несущий и введен У. Гамильтоном в 1845 г.
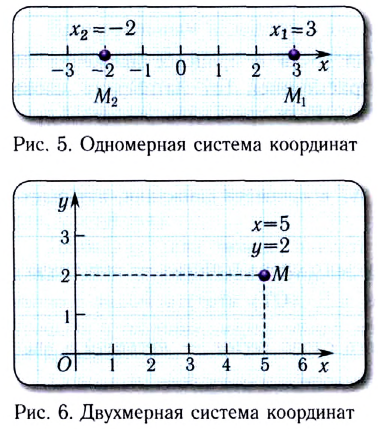
Перемещением называют вектор  направленный из точки, заданной радиус-вектором
направленный из точки, заданной радиус-вектором  где МТ находилась в начальный момент времени, в точку, заданную радиус-вектором
где МТ находилась в начальный момент времени, в точку, заданную радиус-вектором  где МТ находится в рассматриваемый момент времени (рис. 4):
где МТ находится в рассматриваемый момент времени (рис. 4):

Для количественного описания механического движения тел (МТ) вводятся физические величины, характеризующие пространство и время: длина l, время t.
Длина l определяется как расстояние между двумя точками в пространстве. Основной единицей длины в Международной системе единиц (СИ) является метр (1м).
Время t между двумя событиями в данной точке пространства определяется как разность показаний прибора для измерения времени, например часов. В основе работы прибора для измерения времени лежит строго периодический физический процесс. В СИ за основную единицу времени принята секунда (1с).
В зависимости от вида движения могут выбираться следующие системы координат: одномерная (на прямой линии) (рис. 5), двухмерная (на плоскости) (рис. 6), трехмерная (в пространстве) (рис. 7).

Произвольное движение материальной точки может быть задано одним из трех способов: векторным, координатным, траекторным (естественным).
При векторном способе описания положение движущейся МТ по отношению к выбранной системе отсчета определяется ее радиус-вектором 
Радиус-вектор  всегда проводится из начала координат О в текущее положение материальной точки (рис. 8). При движении положение МТ изменяется. Закон движения в этом случае задается векторным уравнением
всегда проводится из начала координат О в текущее положение материальной точки (рис. 8). При движении положение МТ изменяется. Закон движения в этом случае задается векторным уравнением 
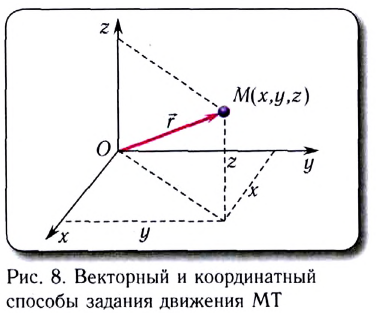
При координатном способе описания положение точки относительно СО определяется координатами х, у, z, а закон движения — уравнениями х = х(t), у = y(t), z = z(t) (см. рис. 8). Исключив из этих уравнений время /, можно найти уравнение траектории движения точки.
Траекторный (естественный) способ описания движения применяется, когда известна траектория движения материальной точки по отношению к выбранной СО (рис. 9).

Текущее положение материальной точки в данном случае определяется расстоянием s, измеренным вдоль траектории от выбранного на ней начала отсчета (точка О на рисунке 9). Кинематический закон движения МТ при этом задается уравнением s = s(t).
Если положить в основу классификации движений характер изменения скорости, то получим равномерные и неравномерные движения, а если вид траектории, то — прямолинейные и криволинейные.
Для того чтобы описать быстроту изменения положения тела (МТ) и направление движения относительно данной СО, используют векторную физическую величину, называемую скоростью 
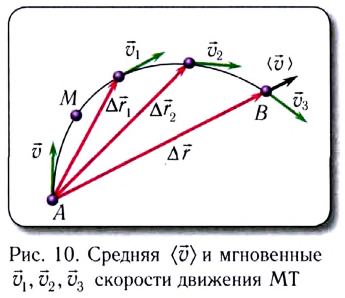
Чтобы охарактеризовать неравномерное движение тела (МТ), вводят понятие средней скорости  движения как отношение перемещения
движения как отношение перемещения  тела к промежутку времени
тела к промежутку времени  за который это перемещение произошло (рис. 10):
за который это перемещение произошло (рис. 10):

Средней путевой скоростью  называется отношение длины отрезка пути As (см. рис. 9) к промежутку времени
называется отношение длины отрезка пути As (см. рис. 9) к промежутку времени  его прохождения:
его прохождения:

Средняя путевая скорость  в отличие от средней скорости
в отличие от средней скорости  является скалярной величиной.
является скалярной величиной.
Однако средняя скорость  характеризует движение тела (МТ) на определенном участке траектории, но не дает информации о его движении в определенной точке траектории или в определенный момент времени. Кроме того, средняя скорость дает лишь приближенное понятие о характере движения, так как движение в течение каждого малого промежутка времени заменяется равномерным движением. В рамках этой модели скорость тела (МТ) меняется скачком при переходе от одного промежутка времени к другому.
характеризует движение тела (МТ) на определенном участке траектории, но не дает информации о его движении в определенной точке траектории или в определенный момент времени. Кроме того, средняя скорость дает лишь приближенное понятие о характере движения, так как движение в течение каждого малого промежутка времени заменяется равномерным движением. В рамках этой модели скорость тела (МТ) меняется скачком при переходе от одного промежутка времени к другому.
Для того чтобы отразить характер движения в данной точке траектории или в данный момент времени, вводится понятие мгновенной скорости  — это скорость тела (МТ), равная производной перемещения по времени:
— это скорость тела (МТ), равная производной перемещения по времени:

Вектор мгновенной скорости  в любой точке траектории направлен по касательной к ней (см. рис. 10).
в любой точке траектории направлен по касательной к ней (см. рис. 10).
В СИ основной единицей скорости является метр в секунду 
Простейший вид движения — равномерное. Равномерным называется движение МТ, при котором она за любые равные промежутки времени совершает одинаковые перемещения.
При прямолинейном движении в одном направлении модуль перемещения  равен пройденному пути s. Скорость
равен пройденному пути s. Скорость  равномерного движения равна отношению перемещения тела
равномерного движения равна отношению перемещения тела  ко времени
ко времени  за которое это перемещение произошло:
за которое это перемещение произошло:

При равномерном движении скорость постоянна  и равна средней скорости
и равна средней скорости  определяемой выражением (2).
определяемой выражением (2).
Зависимость перемещения от времени имеет вид  Вследствие того, что
Вследствие того, что  — радиус-вектор, задающий положение МТ в начальный
— радиус-вектор, задающий положение МТ в начальный
момент времени  получаем кинематическое уравнение движения в векторном виде
получаем кинематическое уравнение движения в векторном виде

При проецировании радиус-вектора, например, на ось Ох получаем кинематическое уравнение для координаты при равномерном движении:

Здесь  — координата тела (МТ) в начальный момент времени
— координата тела (МТ) в начальный момент времени  Если начальный момент времени
Если начальный момент времени  уравнение принимает вид
уравнение принимает вид
Для наглядности описания механического движения удобно представлять зависимости между различными кинематическими величинами графически.
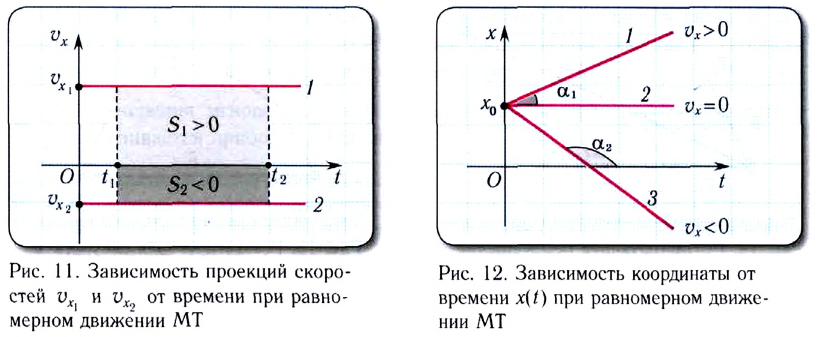
Скорость МТ при равномерном движении постоянна, поэтому график зависимости проекции скорости  от времени представляет собой отрезок прямой линии, параллельной оси времени Ot (рис. 11). Отрезок прямой l на рисунке 11 соответствует движению материальной точки в положительном направлении оси
от времени представляет собой отрезок прямой линии, параллельной оси времени Ot (рис. 11). Отрезок прямой l на рисунке 11 соответствует движению материальной точки в положительном направлении оси 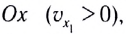 а 2 — в отрицательном
а 2 — в отрицательном  Площади
Площади  закрашенных прямоугольников численно равны модулям перемещений МТ с проекциями скоростей
закрашенных прямоугольников численно равны модулям перемещений МТ с проекциями скоростей  за промежуток времени
за промежуток времени 
График зависимости координаты материальной точки, движущейся равномерно прямолинейно, от времени x(t) — линейная функция (рис. 12).
На рисунке отрезок / прямой соответствует равномерному движению в положительном направлении оси Ох; отрезок 2 прямой — покою материальной точки; отрезок 3 прямой — равномерному движению в отрицательном направлении оси Ох.
Проекция скорости движения численно равна угловому коэффициенту этой прямой линии: 
т. е. тангенсу угла наклона (tga) этой прямой к оси времени.
График зависимости пути (модуля перемещения|  от времени s(t) при равномерном движении представляет собой прямую линию, проходящую через начало координат (рис. 13).
от времени s(t) при равномерном движении представляет собой прямую линию, проходящую через начало координат (рис. 13).
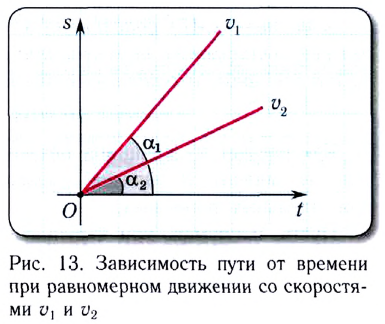
Угловой коэффициент (tga) этой прямой численно равен модулю скорости движения v. Поэтому на рисунке большей скорости у, соответствует больший угловой коэффициент (tg ).
).
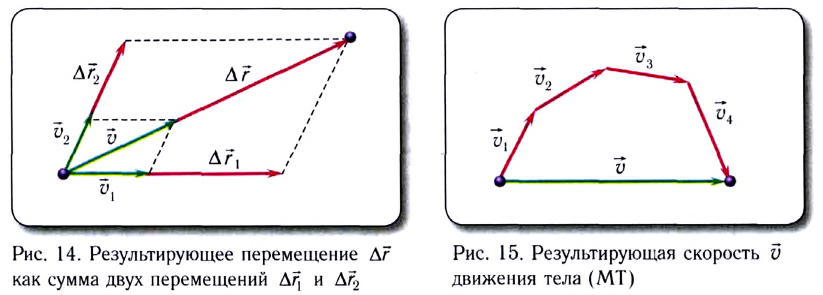
Для тел (МТ), участвующих в нескольких движениях одновременно, справедлив принцип независимости движений:
если тело (МТ) участвует в нескольких движениях одновременно, то его результирующее перемещение равно векторной сумме перемещений за то же время в отдельных движениях:

Как следует из принципа независимости движений, конечное перемещение тела не зависит от порядка (последовательности) суммирования перемещений при отдельных движениях.
Пусть, например, при переправе через реку, скорость течения которой  мы движемся на лодке со скоростью
мы движемся на лодке со скоростью  относительно воды. В этом случае результирующее перемещение
относительно воды. В этом случае результирующее перемещение  (рис. 14) лодки относительно берега будет складываться из собственного перемещения
(рис. 14) лодки относительно берега будет складываться из собственного перемещения  относительно воды и перемещения
относительно воды и перемещения  вместе с водой вследствие течения реки:
вместе с водой вследствие течения реки: 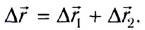
На основе принципа независимости движений формулируется классический закон сложения скоростей:
результирующая скорость  тела (МТ), участвующего в нескольких движениях одновременно, равна векторной сумме скоростей
тела (МТ), участвующего в нескольких движениях одновременно, равна векторной сумме скоростей  отдельных движений (рис. 15):
отдельных движений (рис. 15):

Этот закон справедлив только при условии, что скорость каждого отдельного движения мала по сравнению со скоростью света 
Так, для рассмотренного примера (см. рис. 14) результирующая скорость лодки 
Равномерное движение по прямой линии в повседневной жизни встречается сравнительно редко. Например, различные транспортные средства (автомобиль, автобус, троллейбус и т. д.) равномерно и прямолинейно движутся лишь на небольших участках своего пути, в то время как на остальных участках их скорость изменяется как по величине, так и по направлению.
Для измерения мгновенной скорости движения на транспортных средствах устанавливается прибор — спидометр.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Прямолинейное неравномерное движение
- Прямолинейное равноускоренное движение
- Сложение скоростей
- Ускорение в физике
- Пружинные и математические маятники
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
- Путь и перемещение
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Равномерное прямолинейное движение
Всё в мире находится в движении.
Каждый день, когда мы выходим из дома, мы стараемся рассчитать, насколько быстро доберемся до школы или работы.
Может, однажды мы захотим научиться чему-то новому и купим машину.
А физика объяснит тебе, как не попасть в аварию и как всюду успевать.
Равномерное прямолинейное движение — коротко о главном
Сегодня ты узнал:
А еще ты научился решать задачи разного уровня сложности!
Ой, я что, не сказал? Там сложные были!
Ты, наверное, и не заметил 😉
О том, как решить основную задачу механики
Мы помним, что основная задача механики – указать положение тела в пространстве в любой момент времени, не только в настоящем, но и в будущем.
Итак, что нужно знать для того, чтобы найти положение тела в пространстве?
Неплохо было бы знать, где оно находилось в начале своего движения, его начальные координаты. Ведь нам важно, откуда мы выдвигаемся в путь.
Зависят ли начальные координаты тела от времени? Совсем нет: мы просто принимаем то, что тело где-то есть.
А еще нам важно знать, как далеко оказалось тело от своего начального положения и куда вообще двигалось. Важно знать перемещение этого тела.
Давай опробуем свои силы! Думаю, мы уже готовы решить главную задачу!
Рассмотрим какое-то тело. Оно подвигалось, изменило свое положение, оказалось в другой точке.
Назовем ее конечной и постараемся найти ее координаты, то есть узнать положение тела после совершенного им перемещения.
Помним, что перемещение – вектор, поэтому изобразим его:
![]()
Уже сейчас мы можем указать начальные координаты тела! Нет чисел – не пугаемся, используем буквы:
![]()
Нам нужно узнать конечное положение тела. Отметим координаты тела в конце, их нам и нужно найти, чтобы определить положение тела в конце:
![]()
Но как найти эти координаты, зная лишь начальное положение тела и его перемещение? Как нам попасть из (<_<0>>) в (x) и из (<_<0>>) в (y) ?
Все очень просто! Если есть вектор, то какая-нибудь проекция-то найдется, правда?
Теперь ответить на вопрос, как добраться из начала в конец становится очень легким: просто нужно прибавить к начальной точке проекцию перемещения для нужной оси!
То есть положение точки в любой момент времени можно записать так:
Поздравляю! Мы только что решили основную задачу механики!
Правда, сделали это в общем виде… Но перемещение ведь может быть очень разнообразным! Как вообще его найти? Не всегда же оно будет дано!
Это зависит от движения тела.
Равномерное прямолинейное движение
Определение равномерного прямолинейного движения
Самым простым движением по праву считается равномерное прямолинейное движение. Мы начнем с него.
Давай попробуем дать ему определение.
Всегда стоить помнить, что знать определения наизусть вовсе не обязательно. Главное – научиться строить его самостоятельно.
Успех любого хорошего определения заключается в правильной его структуре.
Равномерное прямолинейное движение – это движение. Мы нашли главное слово нашего определения. Давай развивать его.
Мы уже знаем, что такое движение. Давай дополним это определение.
Что значит равномерное? Равная мера… Но что является этой самой равной мерой?
Тело проходит равные пути. Логично, что происходит это за какие-то промежутки времени.
А за какие промежутки? За равные. За секунду, за минуту, за час. Не обязательно за ОДНУ секунду, ОДНУ минуту, ОДИН час. Равными промежутками времени могут быть, например, три часа или две секунды.
Но что значит прямолинейное? Можно сказать, что это движение по прямой. Но давайте объясним это, исходя из уже знакомых нам понятий.
Представь: какое-то тело движется, у нас в руках секундомер.
Прошла секунда – тело переместилось на метр. Еще секунда – еще метр. В том же направлении.
То есть тело совершает равные перемещения!
Равномерное прямолинейное движение — такое движение, при котором тело за любые равные промежутки времени совершает равные перемещения.
![]()
С перемещением намного проще объяснить, почему за равные промежутки времени можно принимать абсолютно любое количество единиц времени.
Пусть тело совершает за 1 секунду перемещение (vec).
Тогда за две секунды совершает перемещение (2vec):
![]()
Будет ли тело все еще совершать равные перемещения за каждые 2 секунды? Конечно! Давай посмотрим:
![]()
Скорость
Равномерное прямолинейное движение тоже бывает разным: быстрым и медленным. Чтобы охарактеризовать его, существует скорость.
Чем большее перемещение совершает тело за промежуток времени, тем больше его скорость. Это очевидно: за одно и то же время гепард преодолевает расстояние во много раз большее, чем термит.
То есть скорость прямо пропорциональна перемещению!
А еще мы помним, что нам действительно важно направление скорости, ведь нам важно направление движения. То есть скорость – величина векторная. Давай убедимся в этом.
Скорость равномерного прямолинейного движения есть физическая величина, равная отношению вектора перемещения ко времени, за которое оно произошло.
Запишем это в виде формулы:
Векторы с обеих сторон, верно, но… Мы ведь учились умножать векторы, а не делить их. При делении тоже вектор получается?
Да. Ведь любое деление можно представить в виде умножения, смотри:
Время – скалярная величина. Оно не имеет направления. Поэтому можно сказать, что скорость есть перемещение, умноженное на скаляр, то есть тоже вектор! Более того, вектор перемещения и скорости сонаправлены.
Подробнее о свойствах векторов можно прочитать в Большой теории по векторам.
Помнишь, мы чуть выше выясняли, будет ли тело все так же совершать одинаковые перемещения за 2 секунды, а не за одну? Причем эти перемещения сами будут в два раза больше. Значит отношение останется прежним, вот так:
Отсюда делаем вывод:
Скорость равномерного прямолинейного движения постоянна.
Как это записать? Кажется, очевидно, но это «задачка со звездочкой». Вот так:
Мы не можем приравнять векторную величину к скалярной. Поэтому над константой тоже нужно ставить вектор.
Решение основной задачи механики для равномерного прямолинейного движения
Из уравнения скорости можно легко выразить перемещения, что сделает нас на шаг ближе к конкретному решению основной задачи. Давай сделаем это:
Из свойств векторов мы помним, что это будет справедливо и для проекций:
Стоп-стоп-стоп… Мы что, можем уже с помощью этого определить положение точки?
Да, почему нет? Просто подставим это вместо проекций перемещения туда, где мы решали основную задачу механики в общем виде:
Обычно в задачах по физике мы стараемся выбрать оси так, чтобы было проще работать с проекциями. Мы стараемся расположить их так, чтобы как можно больше векторов располагалось параллельно один осям и перпендикулярно другим, вот так:
![]()
Проекция перемещения на ось Y будет равняться нулю, мы можем не обращать на нее внимания.
По оси Y тело вообще не меняло своего положения, верно?
Именно поэтому в задачах чаще всего мы будем использовать упрощенный вариант нахождения конечного положения тела. Его координата будет описана лишь одним числом.
То есть используем лишь одну ось:
Работаем с проекциями. Настораживаемся. Вспоминаем о знаках.
Здесь все просто: если проекция скорости положительна, тело движется вдоль оси. Если она отрицательна, тело движется против оси.
Помни, что работаем мы с координатной осью! Начальное положение тела тоже может быть отрицательным. Это зависит лишь от того, как расположено тело относительно начала координат:
![]()
Графики равномерного прямолинейного движения
Построение графика
Очень важно уметь описывать движение графиком. Это может значительно упростить решение задачи.
Давай посмотрим, как с помощью графика описать равномерное прямолинейное движение.
Любой график – множество точек, который показывает зависимость одного значения от другого. Эта зависимость определяется каким-то уравнением.
Например, когда мы строим параболу, мы руководствуемся уравнением (y=<^<2>>). Как еще это можно записать?
Вот так: (f(x)=<^<2>>). Это показывает, что функция (f) зависит от значения (x).
Давай аналогично составим график движения тела. Вспомним то главное уравнение:
Иными словами, это график зависимости координаты тела от времени. Давай так и запишем:
Начинаем работать с уравнением. Предположим, что нам известна проекция скорости и начальное положение тела. Работать с конкретными числами удобнее.
Тогда уравнение имеет вид: (x=3+0.5cdot t)
Нарисуем оси и обозначим их. Так как у нас даны единицы измерения (метры и секунды), мы обязательно должны подписать их рядом с названиями осей!
Теперь можем взять и рассмотреть положение тела в любую секунду: хоть в первую, хоть в двенадцатую!
Отметим точки и соединим их. Получим график движения.
![]()
![]()
А теперь вопрос на засыпку: может ли время быть отрицательным?
Могу ли я указать положение тела в минус третью секунду? Могу.
Для этого стоит помнить, что «нулевая» секунда – момент, когда мы запускаем секундомер, когда мы только начинаем наблюдать за телом. Но оно могло двигаться и до того, как мы включили таймер, верно?
Давай покажем движение тела до наших наблюдений пунктирной линией:
![]()
Зачастую точки пересечения графика с осями несут в себе очень важную информацию!
Например, когда мы только включили секундомер ((t=0)с), тело находилось в начальном положении ((<_<0>>=3)м), и это видно по графику!
А когда координата тела была равна нулю?
Все очень просто: за 6 секунд до того, как мы включили секундомер! Прямая пересекает ось времени в точке -6.
Итак, мы выяснили, что…
График равномерного прямолинейного движения представляет собой прямую.
Точка пересечения ее с осью Х есть координата в начальный момент времени.
Точка пересечения с осью времени показывает ту секунду, когда тело находится в начале координат.
И действительно, само уравнение (x=<_<0>>+<_>cdot t) уже напоминает стандартное уравнение прямой, которое мы изучаем на математике: (y=kx+m), где (m) — точка пресечения графика с осью Х, а (k) — коэффициент наклона прямой.
В нашем случае роль коэффициента наклона играет проекция скорости.
Зависимость графика от проекции скорости
Давай изобразим несколько графиков в общем виде, то есть без каких-либо конкретных значений. Например, пусть у нас есть два движущихся тела, вот так:
![]()
Чем отличаются движения этих двух тел?
Ну, прежде всего, у них разные начальные положения. Ладно.
А что насчет проекции скорости?
Рассмотрим первое тело. С течением времени оно все больше удаляется от начала координат. А вот второе к нему приближается: оно даже достигает начала координат через некоторое время (когда пересекает ось).
Значит, первое тело идет вдоль оси, а второе против нее, то есть к началу! Мы помним, что это определяет знак проекции скорости.
А именно: проекция скорости первого тела положительна. Проекция скорости второго тела отрицательна.
Со знаками разобрались. А как быть, если попросят узнать, какая проекция скорости больше?
Рассмотрим следующий график. Чтобы было легче его анализировать, представим, что два тела имеют одинаковое положение, когда мы включаем секундомер:
![]()
Чтобы понять, чья скорость больше, рассмотрим определенный промежуток времени, отделим его вертикальной пунктирной линией. А еще обозначим начальную и конечную координаты тел в этот промежуток времени:
![]()
Теперь посмотрим, чем отличаются графики. Ну так, навскидку. Они отличаются наклоном.
График движения второго тела расположен к оси Х значительно ближе. Что это значит?
Рассмотрим, какое расстояние прошло первое тело, обозначим его на рисунке. Оно численно равно проекции перемещения, убедимся с помощью формулы:
![]()
Теперь рассмотрим расстояние, которое преодолело второе тело:
![]()
Видим, что за одинаковый промежуток времени второе тело прошло значительно большее расстояние! Это значит, что его скорость больше.
Чем ближе к оси Х расположена прямая, тем больше скорость движения тела.
А что будешь делать с таким графиком?
![]()
Координата тела с течением времени не меняется. Значит ли это, что тело не движется вовсе?
Нет. Тело не движется лишь по этой оси. Но по какой-нибудь другой оси оно двигаться может.
Например, вот так:
![]()
Тело не меняет координаты по оси Х, однако движется по оси Y.
Если мы видим такой график, мы можем лишь утверждать, что проекция скорости равна нулю. О самой скорости говорить не можем.
Встреча
Помнишь самый первый рисунок с двумя телами? Вот этот:
![]()
В нем есть одна интересная деталь. Графики движения тел пересекаются.
Со временем все понятно: оно для всех идет одинаково, ничего не поделаешь.
А вот с координатой интереснее: ведь мы можем утверждать, что в какой-то момент тела встретились. То есть в какой-то момент их координаты на оси Х стали равны. Обозначим момент встречи и координату («место») встречи:
![]()
Встреча – такое событие, при котором координаты тел в один и тот же момент времени совпадают.
Это еще один момент, о котором стоит помнить при решении задач на графики.
А еще стоит обратить внимание на то, что координаты тел должны совпадать в один момент времени! Если в лесу мимо дуба пробежала лань, а через несколько дней мимо этого же дуба пробежал енот, мы не можем сказать, что они встретились.
Просто у них совпала траектория.
График зависимости проекции скорости от времени. Нахождение проекции перемещения
Рассмотрим несколько другой график. График зависимости проекции скорости от времени при равномерном прямоли…
Стоп, чего? Какой зависимости? Скорость ведь постоянная и не меняется со временем.
Ты абсолютно прав. А график-то начертить можем, вот так:
![]()
Скучный график. Просто прямая, параллельная оси времени. Проекция скорости не меняется, а время всё идет и идет.
Давай хоть что-то найдем по графику. Хоть площадь под ним. Обозначим эту область:
![]()
Получили прямоугольник. Его площадь ищем путем перемножения двух соседних сторон, то есть мы берем проекцию скорости и умножаем еще на время.
Где-то мы это слышали.
Верно, ведь именно так ищется проекция перемещения!
Совпадение? Не думаю.
![]()
Искать проекцию перемещения таким способом можно не только для равномерного прямолинейного движения, но и для других его видов!
Проекция перемещения тела численно равна площади под графиком скорости тела.
Решение простейших задач и задач на графики равномерного прямолинейного движения
Текстовые задачи
Задача 1. Охарактеризуйте движение соседки, которая спускается по лестнице и одновременно с этим закатывает рукава, услышав в 11 часов вечера громкую музыку из квартиры снизу, если уравнение ее движения: (x=2cdot t), а ось направлена вниз по лестнице.
![]()
Решение:
Итак, для начала вспомним уравнение движения в общем виде:
Соответствует ли уравнение движения соседки уравнению выше? Конечно!
Почему? По глазам вижу, догадываешься! Потому что его можно записать так:
Начальная координата соседки равна нулю: соседка двигалась из начала координат. С этим разобрались. Осталось определить тип ее движения.
Она движется вниз по лестнице. Значит, идет по прямой в одном направлении. Это прямолинейное движение.
Она свирепеет и ускоряется? Нет. Она движется равномерно. Давай вспомним уравнение движения для равномерного прямолинейного движения:
И еще раз посмотрим на наше:
Сопоставляем их и понимаем, что рядом с временем расположена проекция скорости. Она, как видим, положительна и равна 2 м/с. Соседка двигается вдоль оси. Ось направлена вниз и соседка движется туда же!
Подробно мы разбирали зависимость направления от знака проекции в Большой теории по векторам.
Таким образом, соседка совершает равномерное прямолинейное движение вдоль оси из начала координат, а проекция ее скорости на эту ось равняется 2 м/с.
Задача 2. Таракан Вася совершает равномерное прямолинейное движение вдоль линейки (соответствующей оси Х) на столе семиклассника Вовы, который, старательно уча уроки, уже неделю не выносит из комнаты мусор. Проекция скорости таракана на эту ось 0.1 м/с. Вова берет секундомер и начинает отсчет в тот момент, когда таракан находится на втором сантиметре линейки.
На каком сантиметре линейки окажется таракан через две секунды?
Решение:
Первое правило решающих физику: увидеть тему и писать формулы по теме.
Второе правило решающих физику: увидеть тему и писать ВСЕ формулы по теме. Могут пригодиться.
Знаем тип движения! Равномерное прямолинейное!
Знаем уравнение равномерного прямолинейного движения! Пишем:
Делов-то! Начнем подставлять известные величины для таракана. Из задачи знаем, что в начале отсчета таракан находится на втором сантиметре линейки…
Никогда не теряй бдительность, боец. Всегда проверяй величины.
Переведем все, что есть, в СИ. Скорость – в м/с. Отлично, уже есть. Как быть с линейкой? Просто перевести сантиметры в метры!
![]()
Таракан был на втором сантиметре, а значит на 0.02 метре линейки!
Теперь можем записать уравнение его движения:
Чтобы узнать, где окажется таракан через 2 секунды, просто подставим цифру 2 в это уравнение:
На 0.22 метре линейки! Получили ответ. Но в задаче спрашивается, на каком сантиметре будет находится таракан. Переводим наш ответ в сантиметры и получаем, что таракан будет находится на 22-ом сантиметре линейки!
Задача 3. По коридору мчится восьмиклассник Петя, уравнение его движения можно описать следующим уравнением: (x=6+2cdot t). За ним несётся разъяренный директор Максим Михайлович, уравнение его движения: (x=3+3cdot t).
Догонит ли директор Петю и, если догонит, когда и на каком метре коридора это произойдет? Скорость измерять в м/с, время в секундах.
Решение:
Итак, давай разберемся. Что вообще значит «догонит»? То же самое, что «встретит», верно?
Мы знаем, что такое встреча. Это такое событие, при котором координаты тел в один и тот же момент времени совпадают.
Чтобы понять, встретятся ли они вообще, давай построим графики движения Пети (П) и директора (Д):
![]()
Видим, что прямые пересекаются. В какой-то момент времени их координаты действительно одинаковы.
Но как узнать, в какой?
Что-что? Видно по графику? Ну уж нет! Думаешь, там координата 12? А вдруг там 11.999?
Всегда нужно проверять себя аналитически.
Запишем два уравнения:
(<_>=3+3cdot t) — директора
При встрече у них одинаковые координаты: (<_
>=<_>)
Да… Наверное, другие части уравнений приравнять будет полезнее:
(6+2cdot t=3+3cdot t)
Отсюда легко вычислить время встречи:
Значит, через три секунды после начала отсчета их координаты будут одинаковы, они встретятся. Найдем место встречи, просто подставив время в одно из двух (какое больше нравится 🙂 ) уравнений:
Директор догонит Петю через 3 секунды. Это произойдет на 12-ти метрах от начала коридора.
Задачи на графики
Задача 4. Написать уравнение движение тела, если график этого движения:
![]()
Решение:
Какое это движение? Видим, что графиком движения является прямая. Значит, это равномерное прямолинейное движение.
Удивительно, но начнем с уравнения:
График очень информативный. По крайней мере мы уже знаем начальную координату: (<_<0>>=8) м
Как найти проекцию скорости? Ну, давай ее выразим для начала.
Дальше все очень просто: сделаем так, чтобы она осталось единственной неизвестной. Подставим в уравнение координату и время из графика, абсолютно любую пару, вот так:
![]()
Проекция скорости отрицательна. И правда: с течением времени тело приближается к началу координат, то есть движется против оси.
Подставим в уравнение:
(x=8-t) — уравнение движения тела.
Задача 5. Тело движется вдоль оси Х. Описать движение на каждом участке графика. Найти проекции скоростей. Построить графики проекции скорости и пройденного пути от времени.
![]()
![]()
Решение:
Опишем движение. Какое оно?
«Ха! Это не прямая, — скажешь ты, — а ломаная!»
И будешь абсолютно прав.
А я скажу: «А что такое ломаная? Это просто соединенные между собой отрезки! А отрезки — части прямых!»
Поэтому давай рассматривать этот график частями!
С первым отрезком все понятно: равномерное прямолинейное движения, ведь эта часть графика – прямая. С течением времени тело приближается к началу координат, значит движется против оси.
Найдем проекцию скорости.
Для начала, что есть скорость?
Мы помним, что скорость – отношение перемещения к промежутку времени.
Знаем, что это справедливо и для проекций:
Ну, время у нас есть. А проекцию перемещения откуда взять?
Давай вспомним, что это такое. Перемещение – вектор, проведенный из начального положения тела в конечное. А проекция перемещения – проекция этого вектора. Логично, правда? То есть:
Подробнее о проекциях можно узнать в Большой теории по векторам.
Вот и нашли проекцию скорости:
Подставим в уравнение выше значения необходимых величин:
![]()
Проекция скорости на первом участке графика равна -3м/с.
Второй отрезок необычнее: тело не меняет координату. Тело на этом участке неподвижно.
Так как в условии сказано, что тело движется именно вдоль оси Х, модуль проекции скорости на эту ось равен длине вектора скорости.
![]()
Так как тело не меняет координату, проекция его перемещения равна нулю. А значит и проекция скорости равна нулю.
Третий отрезок описывает равномерное прямолинейное движение. Тело отдаляется от начала координат и движется туда же, куда направлена ось.
Найдем проекцию скорости на третьем участке:
![]()
Так. Давай разберемся, почему там 12-7.
Помнишь, мы считаем отношение проекции перемещения к ПРОМЕЖУТКУ времени. А от 7 до 12 секунды промежуток времени составляет 5 секунд.
Проекция скорости на третьем участке равна 1м/с.
Всё нашли, осталось лишь построить графики! Начнем с графика зависимости проекции скорости от времени. Начертим и обозначим оси, обязательно обозначив единицы измерения и помня, что проекция может быть отрицательна:
![]()
Работаем с первой частью:
Мы выяснили, что в течение первых двух секунд проекция скорости была постоянна (как-никак, равномерное прямолинейное движение 🙂 ) и равна -3 м/с.
![]()
На втором участке проекция скорости равна нулю, а на третьем – единице.
![]()
Избавимся от вспомогательных линий и получим:
![]()
Что-то мне подсказывает, что на графике пути тоже будет три участка. Приступим.
Нарисуем оси и обозначим их:
![]()
Логично будет утверждать, что, пока тело не начало двигаться, оно и путь никакой не прошло. Отметим это точкой на графике:
![]()
Первые две секунды тело двигалось равномерно со скоростью 3 метра в секунду. Значит, за две секунды тело прошло (3cdot 2=6) метров! Отметим это. Нет, не так, на графике отметим:
![]()
Движемся дальше. Мы знаем, что на втором участке тело было неподвижно, а значит путь никакой не проходило. За промежуток времени второго участка тело не прошло никакой путь.
Однако суммарно за всё свое движение тело все так же прошло 6 метров:
![]()
На третьем участке тело движется. Значит, суммарно пройденный путь увеличится. Оно двигалось со скоростью 1м/с. Посмотрим сколько оно прошло за 5 (12-7) секунд.
Оно пройдет 5 метров.
Добавим их к нашим уже пройденным 6 метрам и получим 11 метров:
![]()
Остается только соединить точки прямой:
![]()
Задача 6. Найти проекцию перемещения тела по графику
![]()
Решение:
Определимся, из чего вообще складывается то, что нам нужно найти. В разные промежутки времени тело двигалось с разными постоянными скоростями.
Значит, проекция перемещения складывается из проекций перемещения в разных промежутках времени! Их 6:
Попробуем найти первую проекцию. Помнишь, мы знаем, что проекция перемещения есть площадь под графиком?
«Под графиком» означает «между графиком и осью», то есть вот эта:
![]()
Что ж, давай найдем перемещение:
Проекция скорости есть -2м/с, а промежуток времени – 3с.
Попробуем найти площадь второго прямоугольника:
![]()
Сразу обрати внимание на то, что промежуток времени – с третьей по пятую секунду, то есть 2 секунды!
Аналогично для остальных:
Посмотрим, чему равна проекция перемещения:
Тяжело в учении – легко в бою. Давай поднажмём и составим график зависимости проекции перемещения от времени.
Когда мы включили таймер, она была равна нулю:
![]()
В конце первого промежутка времени она становится равна -6м:
![]()
А, ну дальше-то все легко: отмечаем 4, потом отмечаем 9… Нет!
Мы ведь работаем с ОБЩЕЙ проекцией. А общая проекция есть сумма.
Тогда в конце второго промежутка проекция будет равна:
Дальше – больше слагаемых.
Следующая точка: (-6+4=-2) м
А после нее:(-6+4+9=7) м и т.д.
![]()
Теперь соединяем точки по порядку:
![]()
Задача 7. Постройте траекторию движения колибри, если начальное положение его по оси Х – 1 м, по оси Y – 3 м, а проекция его скорости на оси, расположенные перпендикулярно друг другу, описывается следующими графиками:
![]()
Решение:
Увидел сложную задачу – пиши всё, что знаешь! Зачем? Так надо! Пиши!
Скорость изменяется скачками, но на отдельных промежутках она постоянна. Тело движется равномерно.
Тело изменяет свое положение в пространстве. Изменяет свою координату.
Вспомним, как записывается уравнение координаты тела при равномерном прямолинейном движении:
Мы учились делать это раньше. Построим графики зависимости координаты от времени.
Итак, по оси Х у нас 3 участка, обозначим их вспомогательными линиями на нашем новом графике:
![]()
Начнем с первого участка. Знаем проекцию скорости и даже начальную координату! Подарок судьбы.
Строим его на первом промежутке:
![]()
Теперь координата тела – 17м и тело начинает двигаться с другой скоростью. Из координаты 17 тело движется со скоростью… А, ни с какой скоростью. Проекция скорости на эту ось равна нулю, поэтому:
Координата не меняется. Рисуем:
![]()
Тело на 17 м. Оттуда продолжаем движение с проекцией скорости -2 м/с. Тогда: (x=17-2cdot t)
![]()
Аналогично строим график для оси Y. Теперь у нас есть два графика:
![]()
Построим траекторию движения в плоскости. Для этого нам нужны оси Х и Y одновременно!
Давай построим их:
![]()
Всегда бери длину с запасом! Чтобы потом не перечерчивать оси. Наибольшее значение по Х – 17м. По Y – 15м. На всякий случай будем брать 20Х20.
Давай будем анализировать по секундам. Каковы были координаты тела в момент начала отсчета? Давай посмотрим.
![]()
В начальный момент времени координата по Х равна 1м, по Y – 3м. В конечный момент по Х координата равна 13, по Y – 15м.
Отметим эти точки:
![]()
Дальше будем рассматривать «переломные моменты». Для первого графика это 8 и 10с, для второго – 4 и 6с.
То есть секунды: 4, 6, 8, 10.
Запишем координаты точек для нужных нам секунд:
Отметим их и соединим прямой, укажем последовательность:
![]()
Теперь ты знаешь, как работать с графиками равномерного прямолинейного движения и их уравнениями! Движемся дальше. Иронично звучит 🙂
Средняя скорость по перемещению. Средняя путевая скорость
Хочешь, покажу фокус?
Из горной пещеры вылетает дракон, а за ним в ту же секунду выбегает доблестный рыцарь. Дракон хочет разрушить замок, находящийся от пещеры на расстоянии 7 километров. Задача рыцаря – добраться до замка первым и остановить дракона.
Рыцарь скачет на лошади прямо к замку по равнине в течении 20 минут. Он обнаруживает, что мост через реку на пути к замку разрушен, поэтому решает переплыть реку, и (спасибо его хорошей подготовке) у него уходит лишь 5 минут на то, чтобы снять с себя доспехи и сделать это. Затем в течении 10 минут он продолжает движение к замку.
Дракон после вылета из пещеры движется вперед и вверх, на это у него уходит 15 минут. На какой-то высоте он останавливается, потому что видит стаю пролетающих мимо уток. Драконы, динозавры, птицы… Смекаешь, да? Он решает поиграться со своими «родственниками», на что у него уходит 15 минут. Затем он вспоминает о замке и стремительно пикирует к нему на протяжении 5 минут.
Давай всё это изобразим для наглядности:
![]()
Дракон и рыцарь совершили одинаковые перемещения, так? 7 км, ведь они оказались у замка, двигаясь из пещеры.
Давай посчитаем время каждого в пути. И для дракона, и для рыцаря оно составило 35 минут. Они прибыли к замку одновременно.
Так что ж получается… Они совершили одинаковое перемещение за одинаковый промежуток времени.
Но их траектории были очень различны! И двигались они по-разному!
Для того, чтобы описать это, существует средняя скорость по перемещению.
Средняя скорость тела – векторная физическая величина, равная отношению перемещения тела на определенном участке траектории ко времени, за которое оно совершено.
Средняя скорость дракона и рыцаря по перемещению одинакова, ведь они пришли одновременно в одно и то же место.
Есть подвох, о котором тебе на математике не рассказали. Ты все время работал не с этой средней скоростью. А с этой:
Средняя путевая скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден.
Понял, да? Путевая – про путь, а не про перемещение. Средняя путевая скорость совпадает (по модулю) со средней скоростью по перемещению только в том случае, если тело двигалось по прямой в одном направлении.
Средняя путевая скорость дракона сильно отличается от средней путевой скорости рыцаря.
Если не помнишь, в чем отличие пути от перемещения, советую посмотреть основные определения кинематики!
Относительность движения. Операции над скоростями
Давай вспомним одну из важнейших вещей, когда мы говорим про движение. Мы давали ему определение, когда говорили о кинематике в целом.
Это тело отсчета. То тело, относительно которого мы рассматриваем движение.
Мы уже знаем, что относительно одного тела тело может нестись с бешеной скоростью, а относительно другого не двигаться вовсе.
От системы отсчета зависит изменение положения тела. А что еще от нее зависит? Траектория зависит?
Однажды человек изобрел колесо и изменил мир. Давай воспользуемся этим изобретением для того, чтобы найти ответ на вопрос выше.
Возьмем какую-то точку на колесе и пусть оно катится по дороге! Как движется эта точка относительно оси колеса? По кругу.
А относительно Земли?
![]()
Эта кривая называется циклоида. И она точно отличается от траектории движения точки относительно оси колеса.
Сегодня мы научимся определять и связывать скорости в разных системах отсчета.
А еще на относительности основан главный закон скоростей – закон об их сложении.
Поступим как настоящие ученые. Готовые формулы – для слабаков. Мы будем выводить их сами.
По реке плывет плот (П) со спортсменом (С). На берегу реки сидит рыбак (Р) и наблюдает за этим. В какой-то момент пловец прыгает с плота и движется к другому берегу реки. Их несёт течение реки.
Давай изобразим это:
![]()
Давай нарисуем вектор перемещения спортсмена относительно плота и назовем его относительным перемещением:
![]()
Теперь нарисуем вектор перемещения плота, которого несет течение. Назовем этот вектор переносным:
![]()
А теперь посмотрим, как спортсмен двигался относительно рыбака, и назовем вектор этого перемещения абсолютным:
![]()
Ты только посмотри! У нас тут треугольник!
Нет, оставь свои теории заговора и иллюминатов. Не тот треугольник. Треугольник суммы векторов!
Переносное перемещение и относительное в сумме дают абсолютное!
Как связать перемещение со скоростью? Нужно поделить его на время!
[spoiler title=”источники:”]
http://www.evkova.org/ravnomernoe-pryamolinejnoe-dvizhenie-v-fizike
http://youclever.org/physics/ravnomernoe-pryamolinejnoe-dvizhenie/
[/spoiler]
[ReD]
Мастер
(1241),
закрыт
10 лет назад
Лучший ответ
Максим
Гуру
(2720)
12 лет назад
если вектор скорости V образует с положительным направлением оси Х угол альфа то его проекция
Vx = V*cos[альфа]
Остальные ответы
Юрий Титов
Мудрец
(11936)
12 лет назад
Расстояние раздели на время
Дмитрий Г.
Ученик
(195)
12 лет назад
Если известен модуль скорости, то его следует умножить на косинус угла между этим вектором и осью абсцисс
kolishnya@yandex.ru
Ученик
(119)
6 лет назад
дгр
Роман Краснов
Знаток
(308)
5 лет назад
а Vy как найти?
Похожие вопросы
Кинематика
Механика — это раздел физики, изучающий механическое движение тел.
Кинематика — это раздел механики, в котором изучается механическое движение тел без учета причин, вызывающих это движение.
Материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь, если
- расстояние, которое проходит тело, много больше его размера;
- расстояние от данного тела до другого тела много больше его размера;
- тело движется поступательно.
Система отсчета — это тело отсчета, связанная с ним система координат и прибор для измерения времени.
Траектория — это линия, которую описывает тело при своем движении.
Путь — это скалярная величина, равная длине траектории.
Перемещение — это вектор, соединяющий начальное положение тела с его конечным положением за данный промежуток времени.
Важно!
В процессе движения путь может только увеличиваться, а перемещение как увеличиваться, так и уменьшаться, например, когда тело поворачивает обратно.
При прямолинейном движении в одном направлении путь равен модулю перемещения, а при криволинейном — путь больше перемещения.
Перемещение на замкнутой траектории равно нулю.
Основная задача механики — определить положение тела в пространстве в любой момент времени.
Содержание
- Механическое движение и его виды
- Относительность механического движения
- Правило сложения перемещений
- Правило сложения скоростей
- Относительная скорость
- Скорость
- Ускорение
- Равномерное движение
- График скорости (проекции скорости)
- График перемещения (проекции перемещения)
- Прямолинейное равноускоренное движение
- Свободное падение (ускорение свободного падения)
- Движение тела по вертикали
- Движение тела, брошенного горизонтально
- Движение тела, брошенного под углом к горизонту (баллистическое движение)
- Движение по окружности с постоянной по модулю скоростью
- Основные формулы по теме «Кинематика»
Механическое движение и его виды
Механическое движение — это изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение может быть:
1. по характеру движения
- поступательным — это движение, при котором все точки тела движутся одинаково и любая прямая, мысленно проведенная в теле, остается параллельна сама себе;
- вращательным — это движение, при котором все точки твердого тела движутся по окружностям, расположенным в параллельных плоскостях;
- колебательным — это движение, которое повторяется в двух взаимно противоположных направлениях;
2. по виду траектории
- прямолинейным — это движение, траектория которого прямая линия;
- криволинейным — это движение, траектория которого кривая линия;
3. по скорости
- равномерным — движение, при котором скорость тела с течением времени не изменяется;
- неравномерным — это движение, при котором скорость тела с течением времени изменяется;
4. по ускорению
- равноускоренным — это движение, при котором скорость тела увеличивается с течением времени на одну и ту же величину;
- равнозамедленным — это движение, при котором скорость тела уменьшается с течением времени на одну и ту же величину.
Относительность механического движения
Относительность движения — это зависимость характеристик механического движения от выбора системы отсчета.
Правило сложения перемещений
Перемещение тела относительно неподвижной системы отсчета равно векторной сумме перемещения тела относительно подвижной системы отсчета и перемещения подвижной системы отсчета относительно неподвижной системы отсчета:
где ( S ) — перемещение тела относительно неподвижной системы отсчета;
( S_1 ) — перемещение тела относительно подвижной системы отсчета;
( S_2 ) — перемещение подвижной системы отсчета относительно неподвижной системы отсчета.
Правило сложения скоростей
Скорость тела относительно неподвижной системы отсчета равна векторной сумме скорости тела относительно подвижной системы отсчета и скорости подвижной системы отсчета относительно неподвижной системы отсчета:
где ( v ) — скорость тела относительно неподвижной системы отсчета;
( v_1 ) — скорость тела относительно подвижной системы отсчета;
( v_2 ) — скорость подвижной системы отсчета относительно неподвижной системы отсчета.
Относительная скорость
Важно! Чтобы определить скорость одного тела относительно другого, надо мысленно остановить то тело, которое мы принимаем за тело отсчета, а к скорости оставшегося тела прибавить скорость остановленного, изменив направление его скорости на противоположное.
Пусть ( v_1 ) — скорость первого тела, а ( v_2 ) — скорость второго тела.
Определим скорость первого тела относительно второго ( v_{12} ):
Определим скорость второго тела относительно первого ( v_{21} ):
Следует помнить, что траектория движения тела и пройденный путь тоже относительны.
Если скорости направлены перпендикулярно друг к другу, то относительная скорость рассчитывается по теореме Пифагора:
Если скорости направлены под углом ( alpha ) друг к другу, то относительная скорость рассчитывается по теореме косинусов:
Скорость
Скорость — это векторная величина, характеризующая изменение перемещения данного тела относительно тела отсчета с течением времени.
Обозначение — ( v ), единицы измерения — м/с (км/ч).
Средняя скорость — это векторная величина, равная отношению всего перемещения к промежутку времени, за которое это перемещение произошло:
Средняя путевая скорость — это скалярная величина, равная отношению всего пути, пройденного телом, к промежутку времени, за которое этот путь пройден:
Важно! Чтобы определить среднюю скорость на всем участке пути, надо время разделить на отдельные промежутки и все время представить в виде суммы этих промежутков.
Чтобы определить среднюю скорость за все время движения, надо путь разделить на отдельные участки и весь путь представить как сумму этих участков.
Мгновенная скорость — это скорость тела в данный момент времени или в данной точке траектории.
Мгновенная скорость направлена по касательной к траектории движения.
Ускорение
Ускорение – это векторная физическая величина, характеризующая быстроту изменения скорости.
Обозначение — ( a ), единица измерения — м/с2.
В векторном виде:
где ( v ) – конечная скорость; ( v_0 ) – начальная скорость;
( t ) – промежуток времени, за который произошло изменение скорости.
В проекциях на ось ОХ:
где ( a_n ) – нормальное ускорение, ( a_{tau} ) – тангенциальное ускорение.
Тангенциальное ускорение сонаправлено с вектором линейной скорости, а значит, направлено вдоль касательной к кривой:
Нормальное ускорение перпендикулярно направлению вектора линейной скорости, а значит, и касательной к кривой:
Ускорение характеризует быстроту изменения скорости, а скорость – векторная величина, которая имеет модуль (числовое значение) и направление.
Важно!
Тангенциальное ускорение характеризует быстроту изменения модуля скорости. Нормальное ускорение характеризует быстроту изменения направления скорости.
Если ( a_{tau} ) ≠ 0, ( a_n ) = 0, то тело движется по прямой;
если ( a_{tau} ) = 0, ( a_n ) = 0, ( v ) ≠ 0, то тело движется равномерно по прямой;
если ( a_{tau} ) = 0, ( a_n ) ≠ 0, тело движется равномерно по кривой;
если ( a_{tau} ) = 0, ( a_n ) = const, то тело движется равномерно по окружности;
если ( a_{tau} ) ≠ 0, ( a_n ) ≠ 0, то тело движется неравномерно по окружности.
Равномерное движение
Равномерное движение – это движение, при котором тело за любые равные промежутки времени совершает равные перемещения.
Скорость при равномерном движении – величина, равная отношению перемещения к промежутку времени, за которое это перемещение произошло:
Проекция вектора скорости на ось ОХ:
Проекция вектора скорости на координатную ось равна быстроте изменения данной координаты:
График скорости (проекции скорости)
График скорости (проекции скорости) представляет собой зависимость скорости от времени:
График скорости при равномерном движении – прямая, параллельная оси времени.
График 1 лежит над осью ( t ), тело движется по направлению оси ОХ.
Графики 2 и 3 лежат под осью ( t ), тело движется против оси ОХ.
Перемещение при равномерном движении – это величина, равная произведению скорости на время:
Проекция вектора перемещения на ось ОХ:
График перемещения (проекции перемещения)
График перемещения (проекции перемещения) представляет собой зависимость перемещения от времени:
График перемещения при равномерном движении – прямая, выходящая из начала координат.
График 1 лежит над осью ( t ), тело движется по направлению оси ОХ.
Графики 2 и 3 лежат под осью ( t ), тело движется против оси ОХ.
По графику зависимости скорости от времени можно определить перемещение, пройденное телом за время ( t ). Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Координата тела при равномерном движении рассчитывается по формуле:
График координаты представляет собой зависимость координаты от времени: ( x=x(t) ).
График координаты при равномерном движении – прямая.
График 1 направлен вверх, тело движется по направлению оси ОХ:
График 2 параллелен оси ОХ, тело покоится.
График 3 направлен вниз, тело движется против оси ОХ:
Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение – это движение по прямой, при котором тело движется с постоянным ускорением:
При движении с ускорением скорость может как увеличиваться, так и уменьшаться.
Скорость тела при равноускоренном движении рассчитывается по формуле:
При разгоне (в проекциях на ось ОХ):
При торможении (в проекциях на ось ОХ):
График ускорения (проекции ускорения) при равноускоренном движении представляет собой зависимость ускорения от времени:
График ускорения при равноускоренном движении – прямая, параллельная оси времени.
График 1 лежит над осью t, тело разгоняется, ( a_x ) > 0.
График 2 лежит под осью t, тело тормозит, ( a_x ) < 0.
График скорости (проекции скорости) представляет собой зависимость скорости от времени:
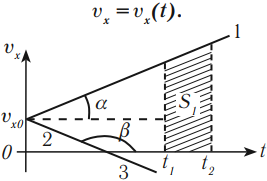
График скорости при равноускоренном движении – прямая.
График 1 направлен вверх, тело движется равноускоренно в положительном направлении оси ОХ, ( v_{0x} ) > 0, ( a_x ) > 0.
График 2 направлен вниз, тело движется равнозамедленно в положительном направлении оси ОХ, ( v_{0x} ) > 0, ( a_x ) < 0,

График 3 направлен вниз, тело движется равноускоренно против оси ОХ, ( v_{0x} ) < 0, ( a_x ) < 0. По графику зависимости скорости от времени можно определить перемещение, пройденное телом за промежуток времени ( t_2-t_1 ). Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Перемещение при равноускоренном движении рассчитывается по формулам:
Перемещение в ( n )-ую секунду при равноускоренном движении рассчитывается по формуле:
Координата тела при равноускоренном движении рассчитывается по формуле:
Свободное падение (ускорение свободного падения)
Свободное падение – это движение тела в безвоздушном пространстве под действием только силы тяжести.
Все тела при свободном падении независимо от массы падают с одинаковым ускорением, называемым ускорением свободного падения.
Ускорение свободного падения всегда направлено к центру Земли (вертикально вниз).
Обозначение – ( g ), единицы измерения – м/с2.
Важно! ( g ) = 9,8 м/с2, но при решении задач считается, что ( g ) = 10 м/с2.
Движение тела по вертикали
Тело падает вниз, вектор скорости направлен в одну сторону с вектором ускорения свободного падения:
Если тело падает вниз без начальной скорости, то ( v_0 ) = 0.
Время падения рассчитывается по формуле:
Тело брошено вверх:
Если брошенное вверх тело достигло максимальной высоты, то ( v ) = 0.
Время подъема рассчитывается по формуле:
Движение тела, брошенного горизонтально
Движение тела, брошенного горизонтально, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали со скоростью ( v_0=v_{0x} );
- равноускоренного движения по вертикали с ускорением свободного падения ( g ) и без начальной скорости ( v_{0y}=0 ).
Уравнение скорости:
Уравнение координаты:
Скорость тела в любой момент времени:
Дальность полета:
Угол между вектором скорости и осью ОХ:
Движение тела, брошенного под углом к горизонту (баллистическое движение)
Движение тела, брошенного под углом к горизонту, можно представить как суперпозицию двух движений:
- равномерного движения по горизонтали;
- равноускоренного движения по вертикали с ускорением свободного падения.
Уравнение скорости:
Уравнение координаты:
Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
Время подъема на максимальную высоту:
Максимальная высота подъема:
Время полета:
Максимальная дальность полета:
Важно!
При движении вверх вертикальная составляющая скорости будет уменьшаться, т. е. тело вдоль вертикальной оси движется равнозамедленно.
При движении вниз вертикальная составляющая скорости будет увеличиваться, т. е. тело вдоль вертикальной оси движется равноускоренно.
Скорость ( v_0 ), с которой тело брошено с Земли, будет равна скорости, с которой оно упадет на Землю. Угол ( alpha ), под которым тело брошено, будет равен углу, под которым оно упадет.
При решении задач на движение тела, брошенного под углом к горизонту, важно помнить, что в точке максимального подъема проекция скорости на ось ОУ равна нулю:
Это облегчает решение задач:
Движение по окружности с постоянной по модулю скоростью
Движение по окружности с постоянной по модулю скоростью – простейший вид криволинейного движения.
Траектория движения – окружность. Вектор скорости направлен по касательной к окружности.
Модуль скорости тела с течением времени не изменяется, а ее направление при движении по окружности в каждой точке изменяется, поэтому движение по окружности – это движение с ускорением.
Ускорение, которое изменяет направление скорости, называется центростремительным.
Центростремительное ускорение направлено по радиусу окружности к ее центру.
Центростремительное ускорение – это ускорение, характеризующее быстроту изменения направления вектора линейной скорости.
Обозначение – ( a_{цс} ), единицы измерения – м/с2.
Движение тела по окружности с постоянной по модулю скоростью является периодическим движением, т. е. его координата повторяется через равные промежутки времени.
Период – это время, за которое тело совершает один полный оборот.
Обозначение – ( T ), единицы измерения – с.
где ( N ) – количество оборотов, ( t ) – время, за которое эти обороты совершены.
Частота вращения – это число оборотов за единицу времени.
Обозначение – ( nu ), единицы измерения – с–1 (Гц).
Период и частота – взаимно обратные величины:
Линейная скорость – это скорость, с которой тело движется по окружности.
Обозначение – ( v ), единицы измерения – м/с.
Линейная скорость направлена по касательной к окружности:
Угловая скорость – это физическая величина, равная отношению угла поворота к времени, за которое поворот произошел.
Обозначение – ( omega ), единицы измерения – рад/с .
Направление угловой скорости можно определить по правилу правого винта (буравчика).
Если вращательное движение винта совпадает с направлением движения тела по окружности, то поступательное движение винта совпадает с направлением угловой скорости.
Связь различных величин, характеризующих движение по окружности с постоянной по модулю скоростью:
Важно!
При равномерном движении тела по окружности точки, лежащие на радиусе, движутся с одинаковой угловой скоростью, т. к. радиус за одинаковое время поворачивается на одинаковый угол. А вот линейная скорость разных точек радиуса различна в зависимости от того, насколько близко или далеко от центра они располагаются:
Если рассматривать равномерное движение двух сцепленных тел, то в этом случае одинаковыми будут линейные скорости, а угловые скорости тел будут различны в зависимости от радиуса тела:
Когда колесо катится равномерно по дороге, двигаясь относительно нее с линейной скоростью ( v_1 ), и все точки обода колеса движутся относительно его центра с такой же линейной скоростью ( v_1 ), то относительно дороги мгновенная скорость разных точек колеса различна.
Мгновенная скорость нижней точки ( (m) ) равна нулю, мгновенная скорость в верхней точке ( (n) ) равна удвоенной скорости ( v_1 ), мгновенная скорость точки ( (p) ), лежащей на горизонтальном радиусе, рассчитывается по теореме Пифагора, а мгновенная скорость в любой другой точке ( (c) ) – по теореме косинусов.
Основные формулы по теме «Кинематика»
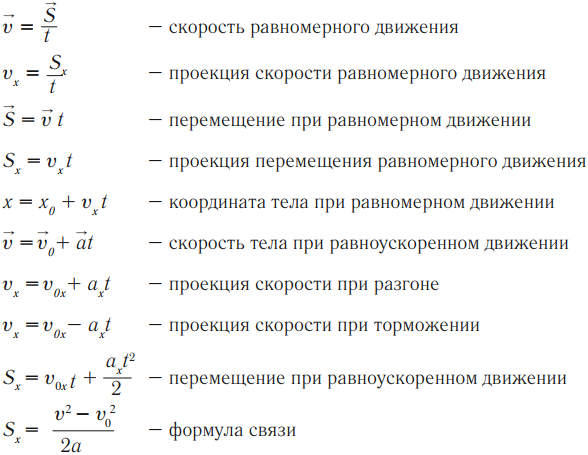
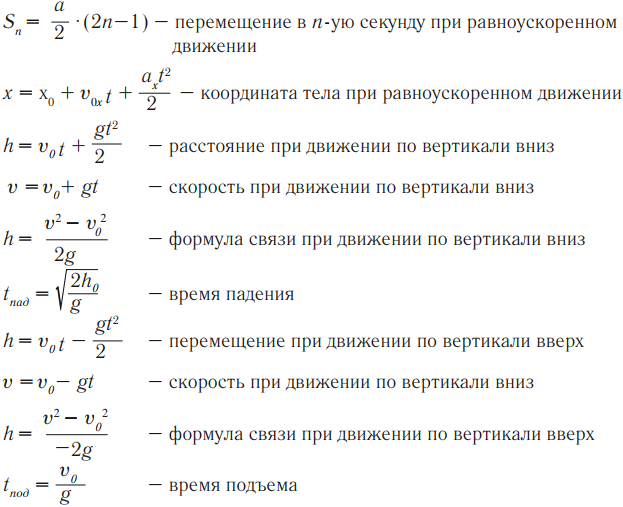
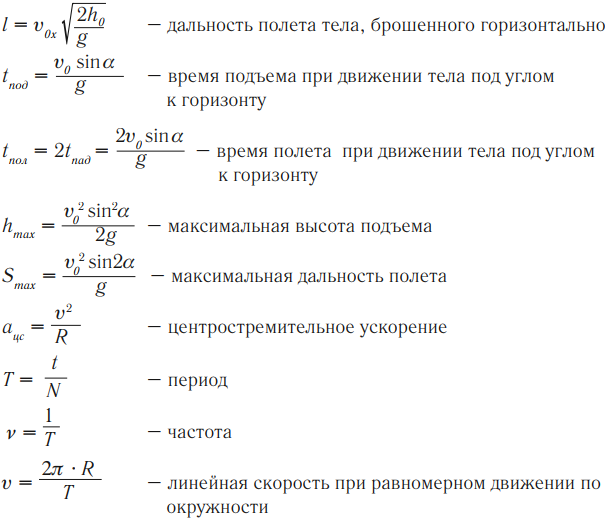
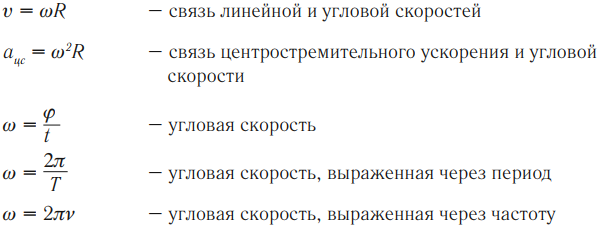
Кинематика
3 (59.84%) 129 votes
