Равнозамедленное движение. Формула равнозамедленного движения. График равнозамедленного движения
Что такое равнозамедленное движение?
Равнозамедленное движение определение
Определение равнозамедленного движения:
Если укорение отрицательно, то модуль скорости равномерно уменьшается.
График скорости равнозамедленного движения
Пример графика скорости равнозамедленного движения, здесь начальная скорость равна 2 м/с, ускорение отрицательно и модуль его равен 0,3 м/с 2 :
(Этот график я построил с помощью построителя графиков. Выбрал в нём вид функции «Линейная: y = k * x + b» установил k = -0.3, b = 2 и нажал кнопку «Построить график».)
Чем больше отрицательное ускорение, тем быстрее будет падать скорость в нашем примере, т.е. если задать большее ускорение, то график круче пойдёт вниз.
Равнозамедленное движение формула
Формула скорости равнозамедленного движения (прямолинейного):
в этой формуле все величины являются скалярами, а не векторами.
Из формулы скорости равнозамедленного движения видно, что если увеличить ускорение, то быстрее будет падать скорость.
В момент времени t1 скорость падает до нуля, а после этого момента скорость нарастает, тело движется равноускоренно, но с отрицательной скоростью.
Формулы равномерного и равноускоренного движения
Равномерное движение (движение тела с постоянной скоростью)
Формула скорости движения при равномерном движении: 
v=const
a=0
v — скорость, м/с
s — перемещение, м
t — время, с
Формула перемещения при равномерном движении: 
Координата вычисляются через кинематическое уравнение равномерного прямолинейного движения по формуле: 
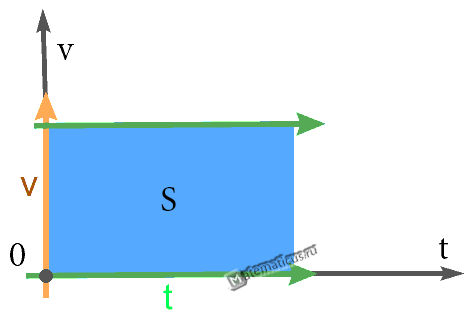
График — Равномерного прямолинейного движения
Равноускоренное движение
Формула скорости при равноускоренном движении: 
a=const
v0 — начальная скорость, м/с
a — ускорение, м/с 2
Формула для нахождения перемещения при равноускоренном движении: 
или 
Уравнение равноускоренного движения в проекции на оси координат: 
Формула для определения ускорения при равноускоренном прямолинейном движении: 
v0 — начальная скорость, м/с
v — мгновенная скорость, м/с
Формула для определения средней скорости движения: 

График — Равноускоренное движение при a>0
Равнозамедленное движение
Равнозамедленное движение — это движение тела, при котором модуль скорости равномерно уменьшается с течением времени, а вектор ускорения остается постоянным как по модулю, так и по направлению.
Формула скорости при равнозамедленном движении: 
Формула перемещения при равнозамедленном движении: 
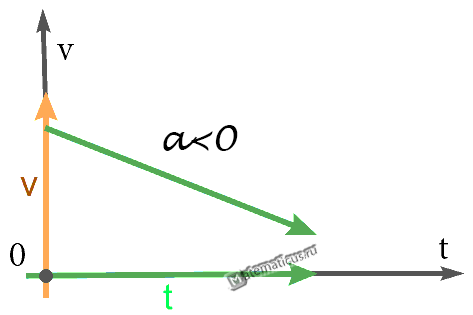
График — Равнозамедленное движение при a 2
Формула для вычисления скорости при свободном падении тела: 
Формула для вычисления перемещения при свободном падении тела: 
Формула координаты при свободном падении тела: 
Формула высоты с которой тело свободно падает: 
Формула для определения скорости тела в конце свободного падения: 
Время свободного падения тела равно: 
Уравнение пути при равнозамедленном движении
§ 25. Равнозамедленное движение. Формула пути
1. Понятие равнозамедленного движения. Формула пути.
Определение. Прямолинейное движение называется равнозамедленным , если за любые равные промежутки времени модуль скорости уменьшается на одну и ту же величину.
Это движение также является частным случаем движения с постоянным ускорением, поэтому любую задачу на это движение можно решать с помощью известных формул проекций скорости и координат движения с постоянным ускорением. Но иногда для более быстрого решения задач можно использовать формулы модуля скорости и пути.
Вначале найдём время, в течение которого тело движется равнозамедленно до остановки.
Получим теперь формулу модуля скорости равнозамедленного движения.
, где , то есть .
Из формулы координаты движения с постоянным ускорением можно получить формулу пути равнозамедленного движения.
, где .
2. График пути равнозамедленного движения.
Графиком пути при равнозамедленном движении является ветвь параболы; вершина параболы расположена в конце времени движения.
2а. Тело двигалось равнозамедленно, остановилось, а затем вновь начало двигаться (равноускоренно) в противоположном направлении: например, мяч, брошенный вертикально вверх.
График пути в этом случае будет выглядеть так.
Никакую часть этого материала ни в каких целях, включая образовательные и научные, нельзя без письменного разрешения владельца авторских прав дублировать в сети Интернет и воспроизводить в какой бы то ни было форме и какими бы то ни было средствами, будь то электронные или механические, включая запись на магнитный или электронный носитель, вывод на печать, фотокопирование.
[spoiler title=”источники:”]
http://education-for.narod.ru/bas/kinematika/p25.html
[/spoiler]
Существует формула, с помощью которой можно посчитать путь, пройденный телом, когда нам известны его начальная скорость, ускорение и конечная скорость.
Сокращенно эту формулу называют «путь без времени». Так ее называют потому, что в правой ее части время t движения отсутствует (рис. 1).

Рис.1. Так выглядит формула, по которой можно вычислить путь тела, не зная, сколько времени занимало движение
Формула пути без времени помогает упростить решение некоторых задач кинематики. Особенно, задач, части C.
Однако, не торопитесь на ЕГЭ записывать эту формулу в готовом виде. Сначала в решении задачи нужно записать вывод этой формулы. И только потом ее можно использовать.
Формулу выводят из выражений для равнопеременного движения. Сейчас я помогу вам вывести эту формулу с помощью нескольких простых шагов.
Выводим формулу пути без времени
Для определенности будем считать, что тело движется по прямой все быстрее и быстрее. То есть, скорость тела увеличивается, так как появляется ускорение.
В таком случае векторы ускорения и скорости тела будут сонаправленными (параллельными и направленными в одну и ту же сторону).
Сонаправленные или противоположно направленные векторы называют коллинеарными векторами. Прочитайте подробнее о коллинеарных векторах.
Чтобы вычислить путь тела, когда скорость его увеличивается, нужно использовать две формулы:
[ large begin{cases} S = v_{0} cdot t + displaystylefrac{a}{2} cdot t^{2} \ v = v_{0} + a cdot t end{cases} ]
( large v_{0} left( frac{text{м}}{c} right)) – начальная скорость тела;
( large v left( frac{text{м}}{c} right)) – конечная скорость;
( large a left( frac{text{м}}{c^{2}} right)) – ускорение тела;
( large S left( text{м} right)) – путь, пройденный телом;
(large t left( c right)) – время, за которое тело прошло этот путь.
В формуле для пути S присутствует время t. Получим из нее формулу для пути, в которой время будет отсутствовать.
Что сделать, чтобы получить формулу пути, в которой отсутствует время:
- сначала получить выражение для времени t из уравнения для скорости;
- затем в формулу пути подставить полученное выражение вместо времени t.
Выражаем время из формулы для скорости
Выпишем формулу, связывающую начальную и конечную скорость тела:
[ large v = v_{0} + a cdot t ]
Избавимся в правой части от начальной скорости, обозначенной символом ( v_{0}). Для этого из обеих частей уравнения вычтем число ( v_{0}). Получим такую запись:
[ large v — v_{0} = a cdot t ]
Теперь, чтобы справа в формуле оставалось только время «t», избавимся от ускорения «a». Для этого разделим обе части уравнения на «a»:
[ large frac{ v — v_{0}}{a} = t ]
Это выражение нам пригодится для дальнейшего вывода формулы «путь без времени».
В формулу пути подставим выражение для времени
Запишем теперь формулу для пути S и полученную формулу для времени t, объединив их в систему:
[ large begin{cases} S = v_{0}cdot t + displaystyle frac{a}{2}cdot t^{2}\ displaystyle frac{v — v_{0}}{a} = t end{cases} ]
В первом уравнении системы будем заменять символ t дробью из второго уравнения. Тогда система из двух уравнений превратится в единственное уравнение. И в этом уравнении не будет символа t времени:
[large S = v_{0} cdot frac{ v — v_{0}}{a} + frac{a}{2} cdot left( frac{ v — v_{0}}{a} right)^{2}]
Осталось теперь упростить полученное выражение. Будем производить упрощение по частям.
Упрощаем выражение, расположенное до знака «плюс» в правой части
Выпишем отдельно все, что располагается до знака «плюс» в правой части уравнения:
[large v_{0} cdot frac{ v — v_{0}}{a} ]
Умножим числитель дроби на число (v_{0}).
Для этого:
- сначала числитель обособим скобками;
- затем запишем число (v_{0}) перед скобками;
- а потом внесем это число внутрь скобок.
В числитель дроби, обособленный с помощью скобок помещаем число (v_{0}):
[large v_{0} cdot frac{ (v — v_{0})}{a} = frac{ v_{0} cdot (v — v_{0})}{a} ]
Теперь необходимо умножить скобку на число (v_{0}). На рисунке 2 указано, как правильно выражение в скобках умножить на число, стоящее за скобками.

Рис. 2. Чтобы умножить скобку на число, нужно умножить каждое слагаемое в скобке на это число
Нужно к каждой скорости в скобках дописать число (v_{0}), умножая его на эти скорости. Получим такое выражение:
[large frac{ v_{0} cdot (v — v_{0})}{a} = frac{ (v_{0} cdot v — v_{0} cdot v_{0})}{a} = frac{ (v_{0} cdot v – v^{2}_{0} )}{a} ]
То есть, вместо первоначальной записи, мы получили такую запись:
[large v_{0} cdot frac{ (v — v_{0})}{a} = frac{ (v_{0} cdot v – v^{2}_{0} )}{a} ]
Возводим в квадрат дробь
После знака «плюс» в правой части уравнения располагается дробь, которую нужно возвести в квадрат. Обратим внимание на эту дробь:
[large left( frac{ v — v_{0}}{a} right)^{2}]
Правильно возвести дробь в степень поможет рисунок 3.
Рис. 3. Дробь возводим в степень, отдельно возводя в эту степень ее числитель и знаменатель
В результате возведения в квадрат дробь приобретет такой вид:
[large left( frac{ v — v_{0}}{a} right)^{2} = frac{ (v — v_{0})^{2}}{a^{2}}]
В числителе этой дроби находится выражение в скобках, которое нужно возвести в квадрат. И нам придется применить одну из формул сокращенного умножения. Запоминать формулы сокращенного умножения удобно в виде, приведенном на рисунке 4.

Рис. 4. Удобный для запоминания вид формул сокращенного умножения
Используем для этого формулу сокращенного умножения, которая содержит знак «минус». Она называется «Квадрат разности». Тогда числитель дроби превратится в такую запись:
[large ( v — v_{0})^{2} = (v^{2} + v^{2}_{0} — 2vv_{0})]
Теперь можем записать полученную дробь:
[large frac{ (v — v_{0})^{2}}{a^{2}} = frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{a^{2}} ]
Упрощаем правую часть, записанную после знака «плюс»
Обратим внимание на все, что располагается в правой части уравнения после знака «плюс»:
[large frac{a}{2} cdot left( frac{ v — v_{0}}{a} right)^{2}]
Мы уже провели некоторые преобразования и можем теперь заменить дробь, возводимую в квадрат более подробной записью:
[large frac{a}{2} cdot left( frac{ v — v_{0}}{a} right)^{2} = frac{a}{2} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{a^{2}}]
Примечание: Когда мы умножаем одну дробь на другую, то можем менять местами знаменатели этих дробей.
Итак, поменяем местами знаменатели дробей:
[large frac{a}{2} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{a^{2}} = frac{a}{a^{2}} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2}]
Теперь видно, что мы можем сократить ускорение и еще немного упростить выражение:
[large frac{a}{a^{2}} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2} = frac{1}{a} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2}]
А перемножив числители и знаменатели двух дробей, получим такую запись:
[large frac{1}{a} cdot frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2} = frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2a}]
Теперь, первоначальную дробь можно заменить дробью, полученной в ходе преобразований:
[large frac{a}{2} cdot left( frac{ v — v_{0}}{a} right)^{2} = frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2a}]
Мы закончили преобразовывать выражения, содержащиеся в правой части уравнения после знака «плюс».
Теперь, осталось сложить две дроби в правой части – дробь, записанную до знака «плюс» с дробью, записанной после знака «плюс». А чтобы эти дроби можно было сложить, нужно будет привести их к общему знаменателю.
Приводим к общему знаменателю дроби в правой части уравнения
Вернемся еще раз к первоначальному уравнению:
[large S = v_{0} cdot frac{ v — v_{0}}{a} + frac{a}{2} cdot left( frac{ v — v_{0}}{a} right)^{2}]
Заменим правую часть этого уравнения выражениями, которые мы получили:
[large S = frac{ (v_{0} cdot v – v^{2}_{0} )}{a} + frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2a}]
Сравним знаменатели дробей.
Первая дробь обладает знаменателем «a», а вторая – «2a». Выберем число «2a» в качестве общего знаменателя обеих дробей.
Чтобы первую дробь привести к общему знаменателю «2a», умножим ее на единицу:
[large frac{ (v_{0} cdot v – v^{2}_{0} )}{a} = frac{ (v_{0} cdot v – v^{2}_{0} )}{a} cdot 1]
Примечания:
- Нам известно, что если какое-либо число умножить на единицу, то после умножения это число не изменится. Значит, если какое-либо выражение умножить на единицу, то полученное выражение останется равным самому себе. На единицу можно умножать все, что угодно – дроби, выражения в скобках и т. п.
- Математики часто применяют прием умножения на единицу. А после этого единицу записывают в виде некоторой дроби. При этом используют правило: Единица – это дробь, у которой числитель и знаменатель равны (одинаковые).
Так как снизу в первой дроби не хватает числа 2, то единицу представим в виде дроби 2/2:
[large frac{ (v_{0} cdot v – v^{2}_{0} )}{a} cdot 1 = frac{ (v_{0} cdot v – v^{2}_{0} )}{a} cdot frac{2}{2}]
Получим такую дробь:
[large frac{ (v_{0} cdot v – v^{2}_{0} )}{a} cdot frac{2}{2} = frac{ 2(v_{0} cdot v – v^{2}_{0} )}{2a} ]
Поместим ее в выражение для пути:
[large S = frac{ 2(v_{0} cdot v – v^{2}_{0} )}{2a} + frac{(v^{2} + v^{2}_{0} — 2vv_{0})}{2a}]
Дроби с одинаковыми знаменателями складываем
Теперь знаменатели дробей равны. И мы можем записать эти дроби под общим знаменателем:
[large S = frac{ 2(v_{0} cdot v – v^{2}_{0} ) + (v^{2} + v^{2}_{0} — 2vv_{0})}{2a}]
Раскроем скобки в числителе полученного выражения:
[large S = frac{ 2v_{0} v – 2v^{2}_{0} + v^{2} + v^{2}_{0} — 2vv_{0}}{2a}]
Примечание: Обратим внимание на то, что в числителе дважды встречается член (2v_{0} v), обладающий различными знаками. В начале числителя – знаком «плюс», а в конце числителя – знаком «минус». Это означает, что из числа (2v_{0}v) вычитается такое же число (2vv_{0}). В конце концов, это число покидает нашу запись и, она упрощается:
[large S = frac{ – 2v^{2}_{0} + v^{2} + v^{2}_{0}}{2a}]
Перепишем выражение, записав все, что содержит знак «плюс» в начало числителя:
[large S = frac{ v^{2} + v^{2}_{0} – 2v^{2}_{0}}{2a}]
Вычтем подобные члены, содержащие ( v^{2}_{0}):
[large v^{2}_{0} – 2v^{2}_{0} = – v^{2}_{0} ]
В результате получим короткую запись. Именно о ней говорят, когда имеется ввиду формула пути без времени:
[large boxed{ S = frac{ v^{2} — v^{2}_{0}}{2a} }]
Примечания:
- Это формула, с помощью которой можно рассчитать путь тела, когда известны его начальная и конечная скорость, а, так же, ускорение.
- Видно, что время t в правой части этого выражения отсутствует.
- Мы выводили эту формулу для случая, когда тело увеличивало скорость.
Как выглядит формула пути без времени, когда скорость тела уменьшается
Если скорость тела будет уменьшаться, формулу для вычисления пути нужно будет переписать в таком виде:
[large boxed{ S = frac{ v^{2}_{0} — v^{2}}{2a} }]
Получить такую формулу можно, проделав все шаги, описанные выше. Попробуйте самостоятельно ее получить. Выводить формулу нужно, используя формулы для уменьшающейся скорости:
[ large begin{cases} S = v_{0} cdot t — displaystyle frac{a}{2} cdot t^{2} \ v = v_{0} — a cdot t end{cases} ]
Выводы
Пусть нам известны начальная и конечная скорость тела и его ускорение. Тогда путь, пройденный телом, можно рассчитать так:
- Когда движение равноускоренное и скорость тела увеличивается: [large boxed{ S = frac{ v^{2} — v^{2}_{0}}{2a} }]
- А когда движение равнозамедленное и скорость уменьшается: [large boxed{ S = frac{ v^{2}_{0} — v^{2}}{2a} }]
Что такое равнозамедленное движение?
Равнозамедленное движение определение
Определение равнозамедленного движения:
Равнозамедленное движение – движение, при котором модуль (величина) скорости равномерно меняется, а вектор ускорения остаётся постоянным и по модулю, и по направлению.
Если укорение отрицательно, то модуль скорости равномерно уменьшается.
График скорости равнозамедленного движения
Пример графика скорости равнозамедленного движения, здесь начальная скорость равна 2 м/с, ускорение отрицательно и модуль его равен 0,3 м/с2: 
(Этот график я построил с помощью построителя графиков. Выбрал в нём вид функции «Линейная: y = k * x + b» установил k = -0.3, b = 2 и нажал кнопку «Построить график».)
Чем больше отрицательное ускорение, тем быстрее будет падать скорость в нашем примере, т.е. если задать большее ускорение, то график круче пойдёт вниз.
Равнозамедленное движение формула
Формула скорости равнозамедленного движения (прямолинейного):
v = v0 — at
в этой формуле все величины являются скалярами, а не векторами.
Из формулы скорости равнозамедленного движения видно, что если увеличить ускорение, то быстрее будет падать скорость.
В момент времени t1 скорость падает до нуля, а после этого момента скорость нарастает, тело движется равноускоренно, но с отрицательной скоростью.
Формула закона равнозамедленного движения:
S = S0 + v0t — (at2)/2
Skip to content
Равномерное движение (движение тела с постоянной скоростью)
Формула скорости движения при равномерном движении:
v=const
a=0
v — скорость, м/с
s — перемещение, м
t — время, с
Формула перемещения при равномерном движении:
![]()
Координата вычисляются через кинематическое уравнение равномерного прямолинейного движения по формуле:
![]()
График — Равномерного прямолинейного движения
Равноускоренное движение
Формула скорости при равноускоренном движении:
![]()
a=const
v0 — начальная скорость, м/с
a — ускорение, м/с2
Формула для нахождения перемещения при равноускоренном движении:
или
Уравнение равноускоренного движения в проекции на оси координат:
Формула для определения ускорения при равноускоренном прямолинейном движении:
v0 — начальная скорость, м/с
v — мгновенная скорость, м/с
Формула для определения средней скорости движения:
График — Равноускоренное движение при a>0
Равнозамедленное движение
Равнозамедленное движение — это движение тела, при котором модуль скорости равномерно уменьшается с течением времени, а вектор ускорения остается постоянным как по модулю, так и по направлению.
Формула скорости при равнозамедленном движении:
![]()
Формула перемещения при равнозамедленном движении:
График — Равнозамедленное движение при a<0
Свободное падение
Постоянная величина скорости свободного падения тела равна g=9,8 м/с2
Формула для вычисления скорости при свободном падении тела:
![]()
Формула для вычисления перемещения при свободном падении тела:
Формула координаты при свободном падении тела:
Формула высоты с которой тело свободно падает:
Формула для определения скорости тела в конце свободного падения:
Время свободного падения тела равно:
![]() 61694
61694
Равномерное прямолинейное движение – это частный случай неравномерного движения.
Неравномерное движение – это движение, при котором тело (материальная точка) за равные промежутки времени совершает неодинаковые перемещения. Например, городской автобус движется неравномерно, так как его движение состоит в основном из разгонов и торможений.
Равнопеременное движение – это движение, при котором скорость тела (материальной точки) за любые равные промежутки времени изменяется одинаково.
Ускорение тела при равнопеременном движении остаётся постоянным по модулю и по направлению (a = const).
Равнопеременное движение может быть равноускоренным или равнозамедленным.
Равноускоренное движение – это движение тела (материальной точки) с положительным ускорением, то есть при таком движении тело разгоняется с неизменным ускорением. В случае равноускоренного движения модуль скорости тела с течением времени возрастает, направление ускорения совпадает с направлением скорости движения.
Равнозамедленное движение – это движение тела (материальной точки) с отрицательным ускорением, то есть при таком движении тело равномерно замедляется. При равнозамедленном движении векторы скорости и ускорения противоположны, а модуль скорости с течением времени уменьшается.
В механике любое прямолинейное движение является ускоренным, поэтому замедленное движение отличается от ускоренного лишь знаком проекции вектора ускорения на выбранную ось системы координат.
Средняя скорость переменного движения определяется путём деления перемещения тела на время, в течение которого это перемещение было совершено. Единица измерения средней скорости – м/с.
vcp = s / t
Мгновенная скорость – это скорость тела (материальной точки) в данный момент времени или в данной точке траектории, то есть предел, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt:
![]()
Вектор мгновенной скорости равнопеременного движения можно найти как первую производную от вектора перемещения по времени:
![]()
Проекция вектора скорости на ось ОХ:
vx = x’
это производная от координаты по времени (аналогично получают проекции вектора скорости на другие координатные оси).
Ускорение – это величина, которая определяет быстроту изменения скорости тела, то есть предел, к которому стремится изменение скорости при бесконечном уменьшении промежутка времени Δt:
![]()
Вектор ускорения равнопеременного движения можно найти как первую производную от вектора скорости по времени или как вторую производную от вектора перемещения по времени:
![]()
Если тело движется прямолинейно вдоль оси ОХ прямолинейной декартовой системы координат, совпадающей по направлению с траекторией тела, то проекция вектора скорости на эту ось определяется формулой:
vx = v0x ± axt
Знак «-» (минус) перед проекцией вектора ускорения относится к равнозамедленному движению. Аналогично записываются уравнения проекций вектора скорости на другие оси координат.
Так как при равнопеременном движении ускорение является постоянным (a = const), то график ускорения – это прямая, параллельная оси 0t (оси времени, рис. 1.15).
Рис. 1.15. Зависимость ускорения тела от времени.
Зависимость скорости от времени – это линейная функция, графиком которой является прямая линия (рис. 1.16).
Рис. 1.16. Зависимость скорости тела от времени.
График зависимости скорости от времени (рис. 1.16) показывает, что
![]()
При этом перемещение численно равно площади фигуры 0abc (рис. 1.16).
Площадь трапеции равна произведению полусуммы длин её оснований на высоту. Основания трапеции 0abc численно равны:
0a = v0 bc = v
Высота трапеции равна t. Таким образом, площадь трапеции, а значит, и проекция перемещения на ось ОХ равна:
В случае равнозамедленного движения проекция ускорения отрицательна и в формуле для проекции перемещения перед ускорением ставится знак «–» (минус).
Общая формула для определения проекции перемещения:
![]()
График зависимости скорости тела от времени при различных ускорениях показан на рис. 1.17. График зависимости перемещения от времени при v0 = 0 показан на рис. 1.18.
Рис. 1.17. Зависимость скорости тела от времени для различных значений ускорения.
Рис. 1.18. Зависимость перемещения тела от времени.
Скорость тела в данный момент времени t1 равна тангенсу угла наклона между касательной к графику и осью времени v = tg α, а перемещение определяют по формуле:
![]()
Если время движения тела неизвестно, можно использовать другую формулу перемещения, решая систему из двух уравнений:
Формула сокращённого умножения разности квадратов поможет нам вывести формулу для проекции перемещения:
![]()
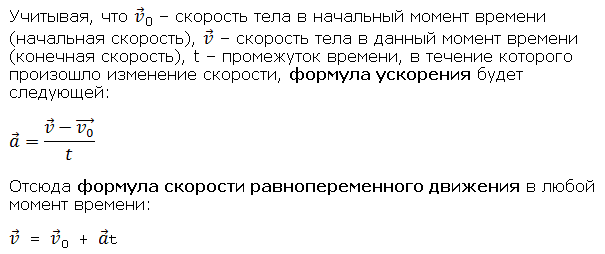
Так как координата тела в любой момент времени определяется суммой начальной координаты и проекции перемещения, то уравнение движения тела будет выглядеть следующим образом:
![]()
Графиком координаты x(t) также является парабола (как и график перемещения), но вершина параболы в общем случае не совпадает с началом координат. При аx < 0 и х0 = 0 ветви параболы направлены вниз (рис. 1.18).
