Чтобы машина
работала двигателем необходимо подать
ток на обмотку якорь и на обмотки
возбуждения,
тогда якорь начнёт ↻
вращаться (правило
левой руки).
При вращении якоря,
его обмотка пересекает силовые линии
магнитного поля обмоток возбуждения.
По этому в ней, по закону электромагнитной
индукции (см. правило
правой руки)
возникает ЭДС индукции.
Направление этой
электродвижущей силы будет противоположно
приложенному на двигатель напряжению
и поэтому она называется – «ПРОТИВО-ЭДС»
двигателя.
![]()
где,
E
– противо-ЭДС
n
– Скорость
вращения вала двигателя
Ф
– Магнитный
поток
с
– постоянный коэффициент (конструкции
двигателя)
Вывод:
«ПРОТИВО-ЭДС»
появляется и нарастает при увеличении
скорости вращения якоря двигателя.
«ПРОТИВО-ЭДС»
уменьшает ток якоря двигателя.
Реостатный пуск двигателя.
При пуске двигателя
в начальный момент скорость вращения
равна нулю, значит и «противо
ЭДС» равна нулю.
Поэтому сила тока при пуске двигателя
будет равна частному от деления
приложенного напряжения на величину
внутреннего сопротивления якоря
двигателя. Поскольку внутреннее
сопротивление якоря крайне мало, то
величина пускового тока будет большой.
Для
предотвращения токовых перегрузок, в
цепь обмотки якоря последовательно
включают дополнительное сопротивление,
или так назывпаемый пусковой реостат,
что даёт возможность уменьшить величину
пускового тока.
Скорость вращения двигателя.
Из
формулы
можно
вывести скорость вращения вала двигателя.

![]()
Из
формулы вытекает, что скорость вращения
вала двигателя можно изменять тремя
способами:
-
Изменением напряжения
на двигатель. -
Изменением
сопротивления в цепи якоря двигателя. -
Изменением
величины магнитного потока.
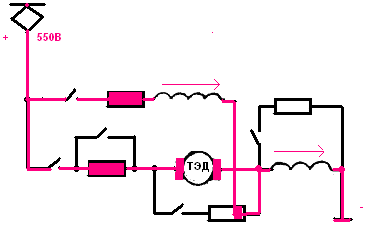
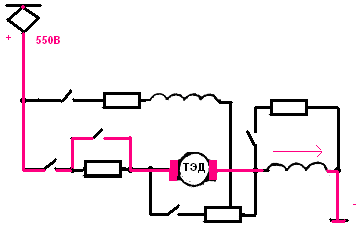
На вагоне установлено
четыре тяговых
электродвигателя смешанного возбуждения.
Они соединены в две группы, причем,
двигатели в группе соединены
последовательно, а группы между собой
– параллельно.
Соединение тяговых
двигателей остается неизменным, поэтому
напряжение на двигателях постоянно
(275В).
Скорость вращения
якорей двигателей, а значит и скорость
движения вагона можно изменять только
2-мя способами:
-
Способом реостатного
регулирования т.е. изменением сопротивления
в цепи якоря.
При пуске электродвигателей полностью
вводиться пусковой реостат, а затем
постепенно (ступенями) осуществляется
его выведение, что приводит к увеличению
силы протекающего тока в цепи якорей.
Реостат
– электрический аппарат, сопротивление
которого можно изменять за счёт выведения
его частей, т.е. уменьшения длинны
проводника. Реостаты служат для
регулирования тока в цепи. -
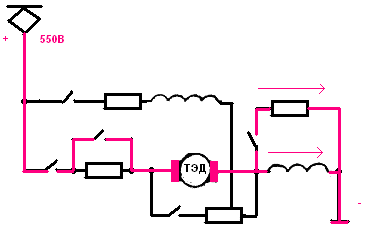
Изменением
величины магнитного потока. В
двигателях смешанного возбуждения
магнитное поле создается шунтовыми и
сериесными обмотками.
Для получения наименьшей скорости при
пуске
– включаются
обе обмотки возбуждения. Для увеличения
скорости вращения двигателя
– необходимо ослабить магнитное поле.
Ослабление магнитного поля двигателя
осуществляется путем отключения
шунтовых обмоток возбуждения двигателя,
а затем подключением в цепь последовательных
обмоток возбуждения двигателей реостатов
ослабления поля.
При этом
ток в цепи якоря разделяется на две
цепи: часть поступает на реостат
ослабления поля и только часть попадает
в последовательную обмотку возбуждения,
тока в обмотке возбуждения станет
меньше чем в якоре. Эти действия
приводит к процессу ослаблением
магнитного поля и за счёт этого скорость
вагона в итоге увеличивается в два
раза.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

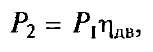
Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
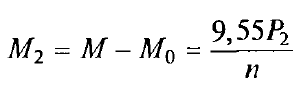
Р2 — полезная мощность двигателя
- Принцип действия
и
устройство генератора
постоянного тока - Обмотки якорей
и
эдс машины
постоянного тока - Магнитное поле
машины
постоянного тока
при нагрузке - Способы
возбуждения генераторов.
Характеристики
генераторов
постоянного тока - Пуск, характеристики, регулирование
частоты вращения
двигателей постоянного тока.
Потери и кпд машин постоянного тока
ПОСТОЯННОГО ТОКА
Работа
машины постоянного тока в режиме двигателя.При включении двигателя постоянного тока в сеть под действием приложенного
напряжения проходит ток как в обмотке якоря, так и в обмотке возбуждения.
Ток возбуждения создает магнитный поток полюсов.
Схема
включения
генератора параллельного возбуждения в сетьВ результате взаимодействия тока в проводниках обмотки якоря о магнитным
полем полюсов создается вращающий момент и якорь машины приходит во вращение.
Таким образом, электрическая энергия преобразуется в энергию механическую.Положим,
что генератор параллельного возбуждения включен в сеть большой мощности
(изо).Ток нагрузки генератора определяется следующим выражением:
I = (E – U)/Rя,
где I
– ток
в обмотке якоря,
Rя – сопротивление этой обмотки;
Е – эдс, индуктируемая
в этой же обмотке;
U – напряжение сети.Направление эдс и тока в активных проводах якоря показано на схеме (изо,
а). Машина развивает электромагнитный
момент Мэ, являющийся тормозным,
т. е. потребляет механическую энергию и вырабатывает энергию электрическую.
Если понизить ток возбуждения, то уменьшится как магнитный поток, так
и эдс, индуктируемая в обмотке якоря. Это вызовет уменьшение нагрузки
генератора.Изменяя
сопротивление регулировочного реостата, можно довести ток возбуждения
до такой величины, при которой эдс в обмотке якоря равна напряжению
сети
(E = U) и ток в якоре равен
нулю, т. е. генератор работает вхолостую.При токе возбуждения, меньшем тока, соответствующего холостой работе
генератора, эдс обмотки якоря будет меньше напряжения сети, и ток в
якоре изменит направление на обратное (изо, б).При изменении направления тока в,проводниках обмотки якоря также изменится
направление электромагнитного момента Мэ,
развиваемого машиной, т. е. момент станет вращающим.
Таким образом, машина, потребляя электрическую энергию, вырабатывает
энергию механическую, т. е. работает двигателем.Если отключить первичный двигатель, то якорь машины будет продолжать
вращаться под действием развиваемого электромагнитного момента Мэ.
При вращении якоря в проводниках его обмотки индуктируется эдс, направление
которой противоположно направлению тока. Поэтому ее называют противо-эдс
или обратной эдс.
Противо-эдс играет роль регулятора потребляемой мощности, т. е. потребляемый
ток изменяется вследствие изменения противо-эдс, равной Е
= СnФ.Вращающий момент, развиваемый двигателем, Мэ
= КIФ.
Приложенное напряжение уравновешивается противо-эдс и падением напряжения
в сопротивлении обмотки якоря и щеточных контактов. Следовательно,
U = E + IRя.
Ток в обмотке и частота вращения якоря определяются следующими выражениями:
I = (U – E)/Rя и n
= (U – IRя)/CФ.Направление вращения якоря двигателя зависит от полярности полюсов и
от направления тока в проводниках обмотки якоря. Таким образом, для
реверсирования двигателя, т. е. для изменения направления вращения якоря,
нужно либо изменить полярность полюсов, переключив обмотку возбуждения,
либо изменить направление тока в обмотке якоря.Обмотка возбуждения обладает значительной индуктивностью, и переключение
ее нежелательно. Поэтому реверсирование двигателей постоянного тока
обычно заключается в переключении обмотки якоря.
Пуск
двигателей постоянного тока.В начальный момент пуска в ход якорь двигателя неподвижен и противо-эдс
равна нулю (Е = 0). При
непосредственном включении двигателя в сеть в обмотке якоря будет протекать
чрезмерно большой ток Iпуск
= U/Rя. Поэтому непосредственное
включение в сеть допускается только для двигателей очень малой мощности,
у которых падение напряжения в якоре представляет относительно большую
величину и броски тока не столь велики.В машинах постоянного тока большой мощности падение напряжения в обмотке
якоря при полной нагрузке составляет несколько процентов от номинального
напряжения, т. е. IRя
= (0,020,1)U.
Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным
напряжением во много раз превышает номинальный.
Для ограничения пускового тока используют пусковые реостаты, включаемые
последовательно с якорем двигателя при пуске в ход.Пусковые реостаты представляют собой проволочные сопротивления, рассчитываемые
на кратковременный режим работы, и выполняются ступенчатыми, что дает
возможность изменять ток в якоре двигателя в процессе пуска его в ход.Схема двигателя параллельного возбуждения с пусковым реостатом показана
на изо, а.
Пусковой реостат этого двигателя имеет три зажима, обозначаемые
буквами Л,
Я, Ш.
Зажим Л
соединен с движком реостата и подключается к одному из полюсов рубильника
(к линии). Зажим Я
соединяется с сопротивлением реостата и подключается к зажиму якоря.
Зажим Ш
соединен с металлической шиной, помещенной на реостате (шунт).Движок реостата скользит по шине так, что между ними имеется непрерывный
контакт. К зажиму Ш
через регулировочное сопротивление Rр
присоединяется обмотка возбуждения. Вторые зажимы якоря и обмотки возбуждения
соединены между собой перемычкой и подключены ко второму полюсу рубильника,
включающего двигатель в сеть.При пуске в ход включается рубильник и движок реостата переводится на
контакт 1,
так что последовательно с якорем соединено полное сопротивление пускового
реостата ПР,
которое выбирается таким, чтобы наибольший ток при пуске в ход Imах
не превышал номинальный ток более чем в 1,7—2,5
раза, т.е.
Rп = U/Imax
– Rя.
При включении двигателя в сеть по обмотке возбуждения также проходит
ток, возбуждающий магнитный поток. В результате взаимодействия тока
в якоре с магнитным полем полюсов создается пусковой момент.
Если пусковой момент окажется больше тормозного момента на валу двигателя
(Мпуск
> Мт), то якорь машины придет во вращение.
Схема
(а)
и характеристики (б)
двигателя параллельного возбужденияПод
действием инерции частота вращения не может претерпевать мгновенных
изменений и будет постепенно увеличиваться. Вместе с ней возрастает
противо-эдс и ток в якоре начнет уменьшаться, что вызывает уменьшение
вращающего момента двигателя.В рабочем режиме сопротивление пускового реостата должно быть полностью
выведено, так как оно рассчитано на кратковременный режим работы и при
длительном прохождении тока выйдет из строя.Когда ток в якоре уменьшится до небольшого значения Imin,
движок пускового реостата переводится на контакт 2.
При этом сопротивление пускового реостата уменьшится на одну ступень,
что увеличит ток.
Сопротивление всех ступеней пускового реостата выбирают так, чтобы при
переводе движка реостата с одного контакта на другой ток в якоре изменялся
от Imin
до Imax.
С увеличением тока в якоре возрастает вращающий момент, вследствие чего
частота вращения вновь увеличивается. С увеличением частоты вращения
якоря возрастает противо-эдс, что вызовет уменьшение тока в якоре.
Когда ток в якоре достигает вновь наименьшего значения, движок реостата
переводится на контакт 3.
Таким образом, сопротивление пускового реостата постепенно (ступенями)
уменьшается, пока оно полностью не будет выведено (движок реостата на
контакте 5),
и в рабочем режиме ток и частотавращения
якоря принимают установившиеся значения, соответствующие тормозному
моменту на валу двигателя.Наименьший ток при пуске в ход зависит от режима работы двигателя.
Если двигатель пускается при полной нагрузке, то Imin
= 1.1Iн.При пуске двигателя без нагрузки или при малых нагрузках этот ток может
быть меньше номинального тока двигателя.Число ступеней пускового реостата зависит от разности Imax
– Imin, причем чем меньше
разность этих токов, тем больше число ступеней. Обычно пусковые реостаты
имеют от 2 до 7 ступеней. При пуске двигателя в ход регулировочное сопротивление
Rv в
цепи возбуждения должно быть полностью выведено, т. е. ток возбуждения
должен быть наибольшим, что дает возможность уменьшить пусковой ток.Для пуска двигателя необходимо создать пусковой момент, больший тормозного
момента на валу.
Так как Mпуск
= KIпускФ, то для уменьшения
пускового тока надо увеличить магнитный поток, т. е. увеличить ток в
обмотке возбуждения.Металлическая шина пускового реостата соединена с зажимом 1.
Это необходимо для того, чтобы при отключении двигателя от сети не было
разрыва цепи обмотки возбуждения, имеющей значительную индуктивность.При отключении двигателя движок пускового реостата переводится на холостой
контакт 0
и рубильник отключается. При этом обмотка возбуждения будет замкнута
на сопротивление пускового реостата и якоря, что дает возможность избежать
перенапряжений и дугообразования.
Характеристики двигателей постоянного тока.Рабочие свойства двигателей определяются их рабочими характеристиками,
представляющими собой зависимости
частоты вращения n,
вращающего момента Мэ,
потребляемого тока I,
мощности P1
и кпдот полезной
мощности на валу Р2.Эти зависимости соответствуют естественным условиям работы двигателя,
т. е. машина не регулируется и напряжение сети остается постоянным.
При изменении полезной мощности P2
(т. е. нагрузки на валу) изменяется также и ток в якоре машины, поэтому
рабочие характеристики часто строятся в зависимости от тока в якоре.Зависимости вращающего момента и частоты вращения от тока в якоре для
двигателя параллельного возбуждения изображены на изо, б.
Частота вращения двигателя определяется следующим выражением:
n = (U – IRя)/СФ.С увеличением нагрузки на валу двигателя возрастает также и ток в якоре.
Это вызывает увеличение падения напряжения в сопротивлении обмотки якоря
и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема),
то магнитный поток также постоянен.
Однако при повышении
тока в якоре увеличивается размагничивающее действие потока реакции
якоря и магнитный поток Ф
несколько уменьшится.
Увеличение IRя
вызывает понижение частоты вращения двигателя, а уменьшение Ф
повышает частоту.
Обычно падение напряжения влияет на изменение частоты в несколько большей
степени, чем реакция якоря, так что с увеличением тока в якоре частота
уменьшается.
Изменение частоты вращения у двигателя этого типа незначительно и не
превышает 5%
при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного
возбуждения имеют жесткую скоростную характеристику.
Вращающий момент двигателя Mэ
= КIФ.При неизменном магнитном потоке зависимость момента от тока в якоре
может быть представлена прямой линией. Но под воздействием реакции якоря
с увеличением нагрузки в некоторой степени уменьшится магнитный поток
и зависимость момента отклонится вниз от прямой линии.
Схема двигателя последовательного возбуждения показана на изо,
а.
Пусковой реостат этого двигателя имеет только два зажима, так как обмотка
возбуждения и якорь образуют одну последовательную цепь.
Характеристики двигателя изображены на изо, б.Частота вращения двигателя последовательного возбуждения определяется
следующим выражением: n =
(U – I(Rя + Rc))/СФ,
где Rc
— сопротивление последовательной обмотки возбуждения.В двигателе последовательного возбуждения магнитный поток не остается
постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное
изменение частоты вращения. Так как падение напряжения в сопротивлении
якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением,
то частоту вращения можно приближенно определить следующим выражением:
n = U/СФ.
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным
току в обмотке возбуждения, который равен току в якоре. Следовательно,
у двигателя последовательного возбуждения частота вращения обратно пропорциональна
току в якоре и она резко уменьшается с увеличением нагрузки, т. е. двигатель
имеет мягкую скоростную характеристику.
Схема
(а)
и характеристики (б)
двигателя последовательного возбужденияС уменьшением нагрузки частота вращения двигателя увеличивается. При
холостом ходе (Iя = 0)
частота вращения двигателя беспредельно возрастает, т. е. двигатель
идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения
является недопустимость сброса нагрузки, т. е. работы вхолостую или
при малых нагрузках.
Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30%
номинальной.
При нагрузке меньше минимально допустимой частота вращения двигателя
резко увеличивается, что может вызвать его разрушение. Поэтому, когда
возможны сбросы или резкие уменьшения нагрузки, двигатели последовательного
возбуждения не применяют.В двигателях очень малых мощностей сброс нагрузки не вызывает разноса,
так как механические потери их будут достаточно большой нагрузкой для
них.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную
зависимость между магнитным потоком и током в якоре
(Ф = С’I),
можно определить следующим выражением:
Mэ = KIФ = К’I
где К’= КС’,
т. е. вращающий момент пропорционален квадрату тока.Однако при больших токах сказывается насыщение стали и зависимость момента
приближается к прямой линии. Таким образом, двигатели этого типа развивают
большие вращающие моменты, что имеет существенное значение при пуске
больших инерционных масс и перегрузках. Эти двигатели широко используют
в транспортных и подъемных устройствах.При смешанном возбуждении возможно как согласное, так и встречное включение
обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения,
так как они обладают плохими пусковыми свойствами и работают неустойчиво.Характеристики двигателей смешанного возбуждения занимают промежуточное
положение между характеристиками двигателей параллельного и последовательного
возбуждения.
Регулирование
частоты вращения двигателей постоянного тока.Двигатели постоянного тока получили широкое распространение и часто
являются незаменимыми благодаря ценному свойству – возможности плавно
и экономично регулировать частоту вращения в широких пределах.Частота вращения якоря двигателя при любой схеме возбуждения определяется
следующим выражением:n = (U
– I(Rя – Rc))/СФ,
где Rc
— сопротивление последовательной обмотки возбуждения (для двигателя
параллельного возбуждения Rс
= 0).Это выражение показывает, что частота вращения двигателя зависит от
напряжения сети, сопротивления цепи якоря и магнитного потока.
Частоту вращения регулируют путем изменения напряжения сети в том случае,
когда источником электрической энергии двигателя является какой-либо
генератор.Для регулирования частоты вращения двигателя изменением сопротивления
цепи якоря используют регулировочный реостат, включенный последовательно
с якорем.В отличие от пускового регулировочный реостат должен быть рассчитан
на длительное прохождение тока. В сопротивлении регулировочного реостата
происходит большая потеря энергии, вследствие чего резко уменьшается
кпд двигателя.Регулируют частоту вращения якоря двигателя изменением магнитного потока,
который зависит от тока в обмотке возбуждения.
В двигателях параллельного и смешанного возбуждения для изменения тока
включают регулировочный реостат, а в двигателях последовательного возбуждения
для этой цели шунтируют обмотку возбуждения каким-либо регулируемым
сопротивлением.
Последний способ регулирования частоты практически не создает дополнительных
потерь и экономичен.

Потери
и кпд машин постоянного токаВ машинах постоянного тока при работе происходит потеря энергии, которая
складывается из трех составляющих.
Первой составляющей
являются потери в стали Рст
на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении
якоря машины сталь его сердечника непрерывно перемагничивается. На ее
перемагничивание затрачивается мощность, называемая потерями на гистерезис.Одновременно при вращении якоря в магнитном поле в сердечнике его индуктируются
вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями
в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания
сердечника якоря.Магнитная индукция определяет эдс машины или, иначе, напряжение, а частота
перемагничивания зависит от частоты вращения якоря. Поэтому при работе
машины постоянного тока в режиме генератора или двигателя потери в стали
будут постоянными, не зависящими от нагрузки, если напряжение на зажимах
якоря и частота его вращения постоянны.Ко второй составляющей
относятся потери энергии на нагревание проводов обмоток возбуждения и
якоря проходящими по ним токами, называемые потерями в меди, – Робм.
Потери в обмотке якоря и в щеточных контактах зависят от тока в якоре,
т. е. являются переменными – меняются при изменениях нагрузки.Третья составляющая
– механические потери Рмех,
представляющие собой потери энергии на трение в подшипниках, трение вращающихся
частей о воздух и щеток о коллектор. Эти потери зависят от частоты вращения
якоря машины. Поэтому механические потери также постоянны, не зависят
от нагрузки.
Кпд машины в процентах:
P2/P1 x 100%
где Р2
– полезная мощность; Р1
– потребляемая машиной мощность.При работе машины генератором полезная мощность P2
= UI,
где U – напряжение на зажимах
генератора; I – ток в нагрузке.Потребляемая мощность
P1 = P2
+ Pст + Pобм + Pмех = UI + Pст + Pобм + Pмехи кпд
(UI/(UI + Pст + Pобм + Pмех))
x 100%.При работе машины двигателем потребляемая мощность
P1 = UI,
где U – напряжение питающей
сети; I – ток, потребляемый
двигателем из сети.Полезная мощность
P2 = P1
– Pст – Pобм – Pмех =
UI – Pст – Pобм – Pмех
и кпд
= ((UI – Pст – Pобм – Pмех)/UI)
x 100%.

ЭЛЕКТРОДВИЖУЩАЯ СИЛА ОБМОТКИ ЯКОРЯ
 При вращении якоря генератора или двигателя в магнитном поле в его обмотке будет наводиться э. д. с.
При вращении якоря генератора или двигателя в магнитном поле в его обмотке будет наводиться э. д. с.
Магнитная индукция в различных точках на окружности якоря имеет разные значения, следовательно, различны и э. д. с, наводимые в отдельных проводах обмотки якоря. Электродвижущая сила машины, равная сумме э. д. с, наводимых в проводах любой из параллельных ветвей обмотки якоря, может быть определена через среднее значение э. д. с. провода, умноженное на число проводов ветви.
Если магнитный поток одного полюса — Ф, то при числе полюсов машины 2р и поверхности якоря Sсреднее значение магнитной индукции на поверхности якоря
Вср = (Ф • 2р)/S = (Ф • 2р)/πdl
где d — диаметр якоря, а l — его длина.
Среднее значение э. д. с. в каждом из проводов при
скорости вращения якоря п об/мин
Eср = Всрlυ((Ф • 2р)/πdl) l ((πdn)/ 60) = Ф2р(n/60)
Обозначим число проводов обмотки якоря N, а число параллельных ветвей ее — 2a. Тогда в каждой параллельной ветви обмотки якоря будет N/a последовательно соединенных проводов. Электродвижущая сила, наведенная в каждое параллельной ветви обмотки якоря, а следовательно, н э. д. с. машины
E = Ecp = 2p(n/60)(N/2a)Ф = (p/a)(n/60)NФ
Обозначив постоянную для данной машины величину N(p/(a•60)) через сЕ , получим :
Е = сЕФп.
Таким образом, э. д. с. машины пропорциональна магнитному потоку и скорости вращения ее якоря.
Рис. 8-12. Поперечная реакция якоря. Рис. 8-13. Перераспределение магнитной индукции от реакция якоря.
МОМЕНТ НА ВАЛУ МАШИНЫ
Независимо от того, в каком режиме работает машина — генератором или электродвигателем, на каждый провод якоря действует электромагнитная сила
Fпр = BcplI = (Ф2р/πdl)lI
где Bcp — среднее значение магнитное индукции; d и I — диаметр и длина якоря; Ф2р — полный поток многополюсной машины;
I=Iя/2а — ток одной параллельной ветви, т. е. одного провода.
Полная сила, действующая на N проводов якоря по касательной к окружности якоря.
Если машина работает генератором, момент будет тормозной (Мт); при работе ее электродвигателем момент будет вращающим (М в). Момент равен произведению тока якоря и потока машины.
МЕХАНИЧЕСКАЯ МОЩНОСТЬ МАШИНЫ ПОСТОЯННОГО ТОКА
Электрическая машина преобразует механическую энергию в электрическую или электрическую в механическую. При этом механическая мощность
Рм = Fυ
Так как F = 2M/d, a υ = ω(d/2) то
Рм = (2M/d)ω(d/2) = Mω
Подставляя сюда выражение для момента, получаем:
Рм = EIя
Таким образом, , развиваемая якорем машины механическая мощность равна ее электрической мощности, т.е. произведению электродвижущей силы и тока якоря. При работе машины генератором мощность EIя больше, чем мощность UIя, отдаваемая потребителю, так как Е > U. Когда машина работает электродвигателем и, значит, Е < U, тогда мощность EIя меньше мощности UIя, подаваемой из сети. Эта разница мощностей численно равна мощности тепловых потерь I2rя в обмотке якоря.
РЕАКЦИЯ ЯКОРЯ
Когда машина работает генератором вхолостую, т. е. при Iя = 0, магнитный поток возбуждения ФB, создаваем мый н. с. FB, существует один и проходит от северного полюса к южному через якорь (рис. 8-12). В этом случае индукция Вδ в воздушном зазоре, в пределах полюсного наконечника, остается практически постоянной.
Если генератор нагружен, т. е. по обмотке якоря проходит ток, якорь сам становится электромагнитом п его и. с. Fя создает второй поток — поперечный поток
якоря Фя. Он замыкается через воздушный зазор машины и поперек ее полюсов, уменьшая индукцию в воздушном зазоре Вδ под одним краем полюса (левым у северного и правым у южного и увеличивая Вδпод другим краем (правым у северного и левым у южного) (рис. 8-13). По отношению направлению вращения якоря можно сказать, что набегающий край полюса размагничивается, а сбегающий — намагничивается.
Суммарный поток машины Ф смещен в направлении вращения якоря; в ту же сторону смещена нейтраль машины, называемая в данном случае физической нейтралью (рис. 8-13). В результате поток Ф при нагрузке несколько уменьшается, так как вследствие насыщения стати размагничивание на набегающем краю полюса оказывается большим, чем намагничивание на сбегающем. Влияние н. с. якоря на величину магнитного потока машины при нагрузке называется реакцией якоря.
В современных машинах постоянного тока, нормального исполнения уменьшение магнитного потока под влиянием реакции якоря незначительно.
Главная опасность этого явления, как будет показано ниже, заключается в том, что магнитная индукция в воз-душном зазоре под краем полюса может сильно возрастать.
Если машина работает электродвигателем, то при направления тока в якоре, указанном на рис. 8-12, якорь будет вращаться в обратную сторону. Следовательно, реакция якоря будет сдвигать поток Фи физическую нейтраль против хода якоря.
Статья на тему Электродвижущая сила обмотки якоря
