Содержание:
- Динамика материальной точки
- Прямая задача динамики точки
- Основные законы динамики
- Уравнения движения материальной точки в декартовых и естественных системах отсчета
- Две основные задачи динамики материальной точки
- Порядок решения прямой задачи динамики невольной материальной точки
- Примеры решения задач на тему: Динамика материальной точки
- Решение задач на тему: Движение материальной точки по криволинейной траектории
Динамика − раздел механики, в котором изучается движение тел под действием приложенных сил. Основной задачей динамики является определение кинематического уравнения движения материальной точки, если известны, приложенные силы к ней со стороны окружающих тел и начальные условия, положение и скорость тела в начальный момент времени.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Динамика материальной точки
Динамикой называется раздел теоретической механики, в котором изучается механическое движение материальных объектов в зависимости от физических факторов, то есть от причин, вызывающих это движение.
Напомним, что в классической механике движение материальных объектов рассматривается с помощью абстрактных моделей: материальной точки, механической системы и абсолютно твердого тела.
Материальная точка – это материальное тело, размерами и разницей в движении его частей которого можно пренебречь.
Механической системой (системой материальных точек) называется совокупность материальных точек, которые между собой взаимодействуют, то есть, положение и движение которых взаимосвязаны.
Абсолютно твердым телом называется совокупность материальных точек, расстояния между которыми во время движения не меняются.
Движение механической системы определяется движением всех его точек. Поэтому изучение динамики начинается с изучения движения одной материальной точки.
В динамике точки рассматриваются две основные задачи:
– движение точки задается, а необходимо найти силы, которые это движение реализуют (первая, или прямая задача);
– силы задаются, а необходимо определить закон движения, который является результатом действия этих сил.
Для решения этих задач используются базовые сведения из статики и кинематики, а также законы динамики, то есть, общие законы движения тел и механических систем под действием приложенных к ним сил. Эти законы впервые в наиболее полном виде сформулированы Исааком Ньютоном в конце XVII века.
Прямая задача динамики точки
Первая (прямая) задача динамики содержит условие: По заданному движению, совершаемому точкой данной массы, требуется найти неизвестную действующую силу.
Основные законы динамики
В динамике изучается движение материальных систем в связи с действующими на них силами. Самым простым объектом механики является материальная точка.
Материальная точка – тело, размерами которого при решении данной задачи можно пренебречь.
Если на положение материальной точки и на ее движение не наложены никакие ограничения, точка называется свободной, в противном случае имеем дело с движением несвободной точки.
Движение механической системы определяется движением всех ее материальных точек. Поэтому изучение динамики начинается с изучения движения одной материальной точки.
В основе динамики лежат три закона И. Ньютона, которые впервые в наиболее полном и законченном виде были сформулированы в книге “Математические начала натуральной философии” (1686 г.).
1. Первый закон (закон инерции):
изолированная от внешних действий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит этого состояния.
2. Второй закон (основной закон динамики):
cила, которая действует на материальную точку, равна произведению массы точки на ее ускорение, а направление силы совпадает с направлением ускорения:

Если на точку действует несколько сил, то их можно заменить равнодействующей:

Если точка движется по какой-то поверхности, то на нее, кроме активных сил действует и реакция связи  .
.
Таким образом в общем случае в уравнении (1.1):

3. Третий закон (закон равенства действия и противодействия):
Силы взаимодействия двух материальных точек равны между собой по модулю и направлены вдоль одной прямой, которая соединяет эти точки, в противоположные стороны.
Уравнения движения материальной точки в декартовых и естественных системах отсчета
Вместо уравнения движения (1.1) в векторной форме можно получить уравнение в скалярной форме, если спроектировать (1.1) на оси декартовой или естественной систем координат.
Уравнение движения в декартовых координатах:

Здесь  – проекции силы
– проекции силы  на соответствующие декартовые оси координат;
на соответствующие декартовые оси координат;
 – проекции ускорения
– проекции ускорения  на те же оси.
на те же оси.
Две основные задачи динамики материальной точки
Первая задача (прямая): зная массу точки  и законы ее движения, например, в декартовых координатах:
и законы ее движения, например, в декартовых координатах:

определить равнодействующую приложенных к точке сил.
Сначала нужно определить проекции ускорения точки на оси координат:

Используя уравнение движения точки в декартовых координатах (1.3), определяем значения проекций равнодействующей приложенных к точке сил, а также ее модуль:

Направление вектора силы относительно осей координат определяется с помощью направляющих косинусов:

Вторая задача (обратная): зная силы, которые действуют на материальную точку, ее массу, а также первоначальные условия (положение точки и ее скорость в некоторые моменты времени, не обязательно в начальный), получить уравнение движения точки.
Порядок решения прямой задачи динамики невольной материальной точки
1. Изобразить на рисунке материальную точку в промежуточном положении.
2. Показать активные силы и реакции связей, которые на нее действуют.
3. Выбрать систему отсчета.
4. Записать векторное уравнение движения точки в форме второго закона динамики (1.1).
5. Спроектировать векторное уравнение движения точки на выделенные оси координат.
6. Из полученных уравнений определить необходимые величины.
Примеры решения задач на тему: Динамика материальной точки
Задача № 1
В шахту начинает опускаться равноускорено лифт, масса которого  В первые 10 с он проходит 35 м.
В первые 10 с он проходит 35 м.
Определить натяжение  каната, на котором висит лифт.
каната, на котором висит лифт.
Решение. Изобразим кабину лифта в произвольном положении (рис.1.1). На лифт действует сила тяжести  , которая направлена вниз, и натяжение каната
, которая направлена вниз, и натяжение каната  , который направлен вдоль троса вверх.
, который направлен вдоль троса вверх.

Движение происходит по вертикали, поэтому направим ось  вертикально вниз в соответствии с направлением скорости и ускорения.
вертикально вниз в соответствии с направлением скорости и ускорения.
Запишем уравнение движения кабины лифта в форме второго закона Ньютона:

где  – ускорение кабины лифта.
– ускорение кабины лифта.
С учетом сил, действующих на кабину лифта, уравнение будет иметь вид:

Спроектируем это уравнение на ось :

С учетом того, что  , находим
, находим

Мы получили зависимость натяжения каната от ускорения, с которым движется кабина лифта.
Проанализируем эту зависимость. Может быть три случая:
В первом случае

То есть, если кабина лифта движется без ускорения в любом направлении, натяжение троса будет равняться силе тяжести кабины лифта.
Во втором случае натяжение троса меньше силы тяжести кабины лифта, потому что  , а если
, а если  , то
, то 
В третьем случае натяжение троса всегда больше силы тяжести кабины лифта, потому что  и
и 
Например, когда  то есть натяжение троса вдвое превышает силу тяжести кабины лифта.
то есть натяжение троса вдвое превышает силу тяжести кабины лифта.
В нашей задаче ускорение определится с выражения для пути при равнопеременном движении с учетом того, что начальная скорость  :
:

Тогда:

Ответ: натяжение троса 
Задача № 2
К телу весом  которое лежит на столе, привязали нить, второй конец которой (рис.1.2) держат в руке.
которое лежит на столе, привязали нить, второй конец которой (рис.1.2) держат в руке.

Определить, с каким ускорением  надо поднимать тело вверх вертикально, чтобы нить оборвалась, если она рвется когда натяжение достигает величины
надо поднимать тело вверх вертикально, чтобы нить оборвалась, если она рвется когда натяжение достигает величины 
Решение: Изобразим тело с привязанной к нему нитью (рис.1.2). Покажем силы, которые действуют на тело: сила тяжести и натяжение нити . Ось направляется по вертикали вверх в положительном направлении скорости и ускорения.
Запишем уравнение движения тела в векторной форме:

Спроектируем это уравнение на ось :

Откуда:

Если учесть числовые данные, то

Ответ: 
Задача № 3
Пуля весом  падает вертикально вниз под действием силы тяжести и испытывает опору среды (рис.1.3). Закон движения шара соответствует уравнению
падает вертикально вниз под действием силы тяжести и испытывает опору среды (рис.1.3). Закон движения шара соответствует уравнению  , причем выражается в сантиметрах,
, причем выражается в сантиметрах,  – в секундах.
– в секундах.

Определить силу сопротивления среды  в виде функции скорости, то есть
в виде функции скорости, то есть 
Решение. Изобразим шар в произвольном положении на траектории и покажем силы, которые на него действуют (рис.1.3):
 – сила тяжести;
– сила тяжести;
 – сила сопротивления среды.
– сила сопротивления среды.
Движение шара происходит вдоль вертикали, поэтому направим ось  вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой
вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой  .
.
Запишем уравнение движения шара в векторной форме:

и спроектируем его на ось  :
:

откуда

Таким образом, чтобы определить силу сопротивления , необходимо знать ускорение шара  .
.
Поскольку закон изменения координаты известен, то

Находим первую и вторую производные от закона движения пули:

Таким образом,

Из выражения  (с учетом того, что
(с учетом того, что  ) вытекает
) вытекает

то есть

Ответ: 
Задача № 4
Движение тела массой  выражается уравнениями:
выражается уравнениями:

где  и
и  – в метрах, а
– в метрах, а  – в секундах.
– в секундах.
Определить силу  , которая действует на тело, принимая его за материальную точку (рис.1.4).
, которая действует на тело, принимая его за материальную точку (рис.1.4).

Решение. Проекции на оси координат силы  , которая приложена к телу, определяются по формулам:
, которая приложена к телу, определяются по формулам:

где  и
и  – проекции ускорения тела на оси координат.
– проекции ускорения тела на оси координат.
В данном случае

Итак

Модуль силы  равен:
равен:

Сила направлена вертикально вниз, поскольку  Таким образом, искомая сила, модуль которой равен
Таким образом, искомая сила, модуль которой равен  , является силой тяжести.
, является силой тяжести.
Ответ: 
Задача № 5
Прямолинейное движение ножа  резального аппарата жатки зерноуборочного комбайна (рис.1.5) приближено выражается уравнением
резального аппарата жатки зерноуборочного комбайна (рис.1.5) приближено выражается уравнением  (
( – в метрах; – в секундах).
– в метрах; – в секундах).

Определить силу , которая приводит нож к движению, в зависимости от расстояния . Вес ножа 
Объяснение: Для привода ножа резального аппарата жатки используются плоские и пространственные механизмы. Среди плоских механизмов нашли применение кривошипно-шатунные, которые состоят из кривошипа 1, шатуна 2 и ножа жатки 3. Механизм преобразует вращательное движение кривошипа 1 в обратно поступательное движение ножа 3.
В уборочных машинах ось кривошипного пальца  находится выше линии движения ножа .
находится выше линии движения ножа .
Решение. Изобразим нож резного аппарата в среднем положении на перемещении и покажем силы, которые действуют на него.
На нож действует сила веса , нормальная реакция опорной поверхности направляющих ножа и сила со стороны шатуна  , которая вызывает движение ножа.
, которая вызывает движение ножа.
Запишем уравнение движения ножа в векторной форме:

Проектируем это уравнение на направление движения ножа (ось ):
 или
или 
Из последнего уравнения следует, что для определения силы необходимо знать ускорение .
Поскольку задан закон движения ножа :  то ускорение определяется как вторая производная от закона движения по времени:
то ускорение определяется как вторая производная от закона движения по времени:

Итак,

Учтем, что  и получим:
и получим:

Ответ: 
Задача № 6
Нагруженная вагонетка массой  опускается по канатной железной дороге с наклоном
опускается по канатной железной дороге с наклоном  и имеет скорость
и имеет скорость  (рис.1.6).
(рис.1.6).

Определить натяжение каната при равномерном опускании и при торможении вагонетки, если время торможения  , общий коэффициент сопротивления движению
, общий коэффициент сопротивления движению  . При торможении вагонетка движется равнозамедленно.
. При торможении вагонетка движется равнозамедленно.
Решение. Изобразим вагонетку в произвольном положении. Покажем силы, которые действуют на нее: силу тяжести , нормальную реакцию железной дороги , натяжение каната и силу сопротивления  .
.
Выбираем декартовую систему координат: ось направим параллельно дороге в сторону движения; ось – вверх перпендикулярно дороге. Запишем векторное уравнение движения вагонетки в форме второго закона Ньютона:

Проектируем векторное уравнение движения на оси координат:

Поскольку  все время движения вагонетки, то
все время движения вагонетки, то  , и из уравнение (2) легко находим величину нормальной реакции:
, и из уравнение (2) легко находим величину нормальной реакции:

Тогда общая сила сопротивления движению составляет:

Для определения натяжения используем уравнение (1)

При равномерном опусканье  и
и  составит:
составит:

При равнозамедленном торможении

где  – начальная скорость;
– начальная скорость;
 – конечная скорость.
– конечная скорость.
Таким образом

Тогда

Ответ: 
Из полученных результатов следует, что при торможении нагрузка на канат увеличивается по сравнению с нагрузкой при равномерном движении.
Задача № 7
Вагон весом скатывается по колее, которая наклонена к горизонту под углом  .
.
Определить силу торможения вагона , которая вызывается трением колес по рельсам, предполагая, что движение вагона происходит с постоянным ускорением, а также то значение угла , при котором вагон будет скатываться равномерно.
Решение. Изображаем вагон в виде материальной точки в произвольном положении на наклонной плоскости и показываем силы, которые на него действуют (рис.1.7): – сила тяжести вагона; – нормальная реакция рельсов; – сила трения.

Выбираем декартовую систему координат, причем ось направим параллельно рельсам в сторону движения вагона; а ось – перпендикулярно рельсам.
Запишем уравнение движения вагона в векторной форме:

и спроектируем его на оси выбранной системы координат:

По уравнению (2) определим силу торможения вагона:

По условиям задачи вагон движется с ускорением  которое направлено вдоль оси
которое направлено вдоль оси  , то есть
, то есть  .
.
Если подставим в уравнение (3) , то получим:

Определим значение угла , при котором вагон будет скатываться равномерно. Поскольку

то

где  – коэффициент трения.
– коэффициент трения.
Откуда получим

Из этого уравнения вытекает, что при изменении угла , можно найти значение угла, при котором  . Если в уравнении (4) присвоить , то
. Если в уравнении (4) присвоить , то

Поскольку известно, что коэффициент трения равен тангенсу угла трения  , то
, то

Таким образом, при углу наклона рельсов к горизонту, что равен углу трения , вагон будет скатываться равномерно.
Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 26.2, 26.8, 26.10, 26.20, 26.24 [2].
Решение задач на тему: Движение материальной точки по криволинейной траектории
При решении задач, связанных с движением точки по криволинейной траектории, если траектория известна, удобно рассматривать движение точки в естественной системе координат  (рис.1.8):
(рис.1.8):

где  – модуль скорости точки,
– модуль скорости точки,
 – радиус кривизны траектории в заданном положении точки.
– радиус кривизны траектории в заданном положении точки.

В уравнениях (1.6) и (1.8)  суммы проекций сил, действующих на точку, на направления осей: касательной (
суммы проекций сил, действующих на точку, на направления осей: касательной ( ), нормальной (
), нормальной ( ) и бинормальной (
) и бинормальной ( ) к траектории в заданном положении точки.
) к траектории в заданном положении точки.
Порядок решения прямой задачи динамики точки в случае использования уравнений (1.6) и (1.8) совпадает с рекомендациями пунктов 1 и 6 занятия № 1.
Если задано уравнение движения материальной точки по траектории в виде  , то для нахождения равнодействующей приложенных к этой точке сил, необходимо сначала найти проекции
, то для нахождения равнодействующей приложенных к этой точке сил, необходимо сначала найти проекции  и
и  полного ускорения точки:
полного ускорения точки:

Далее, с уравнений (1.6), (1.7) находим значения касательной и нормальной проекции силы :

Модуль приложенной к материальной точке силы, при естественном способе обозначения движения, будет равен

Задача № 1
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить модуль равнодействующей сил, приложенных к материальной точке.
Решение. В задаче движение материальной точки задано естественным способом, поэтому для определения равнодействующей сил воспользуемся зависимостями (1.6) и (1.7):

Определим касательное и нормальное ускорение материальной точки:

Поскольку  , то проекция
, то проекция  равнодействующей на касательную ось равняется нулю.
равнодействующей на касательную ось равняется нулю.
Находим нормальную составляющую равнодействующей сил:

Модуль равнодействующей определим из выражения (1.11):

Таким образом, заданное движение материальной точки происходит под действием силы, постоянной по модулю и направленной вдоль радиуса к центру окружности.
Ответ: 
Задача № 2
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить проекцию  равнодействующей сил, приложенных к материальной точке, на касательную к траектории в момент времени
равнодействующей сил, приложенных к материальной точке, на касательную к траектории в момент времени 
Решение. Для определения проекции воспользуемся уравнением (1.6):

Сначала найдем значение скорости материальной точки:

При 
Определяем величину касательного ускорения

при 
Подставив в уравнение (1) значения  и , получим:
и , получим:

Ответ: 
Задача № 3
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить модуль  равнодействующей сил, действующих на точку, в момент времени
равнодействующей сил, действующих на точку, в момент времени 
Решение. Поскольку движение материальной точки задано естественным способом, то модуль равнодействующей сил, приложенных к точке, определяется по зависимостям (1.10) и (1.11):

Величины касательного и нормального ускорения материальной точки определяются по уравнениям (1.9):

Учитывая, что скорость точки

то касательное ускорение точки равно:

Поскольку в момент времени  скорость точки:
скорость точки:

то нормальное ускорение точки составит:

Определяем  и
и  по уравнениям (1.10):
по уравнениям (1.10):

Тогда модуль равнодействующей сил, действующих на материальную точку, равен:

Ответ: 
Задача № 4
На криволинейных участках железнодорожного пути наружный рельс поднимают выше над внутренним (рис.1.9). При движении поезда на этом участке его скорость поддерживают такой, чтобы давление вагона на рельсы было направлено перпендикулярно железнодорожному полотну.

Определить величину  повышения внешнего рельса над внутренним при следующих данных: радиус закругления железнодорожного пути
повышения внешнего рельса над внутренним при следующих данных: радиус закругления железнодорожного пути  , скорость поезда
, скорость поезда  , расстояние между рельсами
, расстояние между рельсами 
Решение. На вагон действуют: сила тяжести , которая направлена вертикально вниз, и реакции рельсов на колеса  и
и  , которые направлены перпендикулярно железнодорожному полотну.
, которые направлены перпендикулярно железнодорожному полотну.
Запишем уравнение движения вагона в векторной форме:

где – ускорение вагона.
Поскольку движение происходит по криволинейной траектории, то выбираем естественную систему координат: ось  направим по нормали к центру кривизны траектории, а ось
направим по нормали к центру кривизны траектории, а ось  – по касательной в сторону движения вагона. Бинормаль, ось
– по касательной в сторону движения вагона. Бинормаль, ось  , на рис. 1.9 не показано.
, на рис. 1.9 не показано.
Проектируем уравнение движения (1) на ось :
 или
или 
Из рис. 1.8 видно, что 
Итак,

Подставив числовые значения известных величин, получаем:

Ответ: 
Задача № 5
Груз  весом
весом  который подвешен к нитке длиной
который подвешен к нитке длиной  в неподвижной точке , представляет собой конический маятник (рис.1.10), то есть движется по окружности в горизонтальной плоскости, при этом нитка с вертикалью образует угол
в неподвижной точке , представляет собой конический маятник (рис.1.10), то есть движется по окружности в горизонтальной плоскости, при этом нитка с вертикалью образует угол  .
.

Определить величину скорости груза и модуль силы натяжения нити .
Решение. Изобразим груз в любом положении и покажем силы, которые на него действуют: силу тяжести , которая направлена вертикально вниз, и натяжение нити , которое направлено к точке подвеса .
Для решения задачи выбираем естественную систему координат: ось  направлена по касательной к окружности в сторону движения груза, ось – по нормали к центру кривизны и ось – вертикально вверх.
направлена по касательной к окружности в сторону движения груза, ось – по нормали к центру кривизны и ось – вертикально вверх.
Запишем уравнение движения груза в векторной форме:

Проектируем это векторное уравнение на оси координат:

Модуль силы натяжения нити найдем из третьего из уравнений (1), учитывая, что  :
:

Из второго из уравнений (1) найдем , если учесть, что

Тогда

Откуда

Ответ: 
Задача № 6
Материальная точка весом  движется по горизонтальной поверхности под действием силы . В период разгона точки путь, который она проходит, меняется по закону
движется по горизонтальной поверхности под действием силы . В период разгона точки путь, который она проходит, меняется по закону  ( – в секундах, – в метрах). Траекторией движения точки на плоскости (рис.1.11) является окружность с радиусом
( – в секундах, – в метрах). Траекторией движения точки на плоскости (рис.1.11) является окружность с радиусом 
Определить модуль силы  , которая действует, в момент, когда модуль скорости точки равен
, которая действует, в момент, когда модуль скорости точки равен 
Решение. Изобразим точку в любом положении на окружности (рис.1.11). Покажем силы, действующие на материальную точку: силу тяжести ; реакцию поверхности , которая перпендикулярна поверхности, и заданную силу , которая лежит в плоскости движения точки и направлена в сторону центра кривизны траектории.

С точкой повяжем естественную систему координат. Ось  направим по касательной к окружности в сторону движения, а ось
направим по касательной к окружности в сторону движения, а ось  – перпендикулярно ей в сторону центра кривизны окружности.
– перпендикулярно ей в сторону центра кривизны окружности.
Запишем уравнение движения точки в виде второго закона Ньютона:

Спроектируем это векторное уравнение на оси выбранной системы координат:

Поскольку закон движения известен, то:

По условиям Найдем момент времени, когда это условие выполняется:

Тогда:

Учитывая, что масса точки равна  , находим:
, находим:

Определяем модуль искомой силы:

Ответ: 
Задача № 7
Радиус закругления моста в точке  равен
равен  (рис.1.12).
(рис.1.12).

Определить, с какой силой автомобиль давит на мост в точке , если его масса  , а модуль скорости движения
, а модуль скорости движения 
Решение. Рассмотрим автомобиль как материальную точку, поскольку его размерами по сравнению с размерами моста можно пренебречь. Изобразим автомобиль в точке моста (рис.1.12) и покажем силы, которые действуют на него: – силу тяжести автомобиля и – реакцию моста.
Поскольку автомобиль движется по криволинейной траектории, то для решения задачи воспользуемся естественной системой координат  .
.
Запишем уравнение движения автомобиля в векторной форме:

и спроектируем его на оси выбранной системы координат:
 (поскольку
(поскольку  то
то  ), (1)
), (1)

Из уравнения (2) определяем реакцию моста по модулю:

Сила давления  автомобиля на мост равна по модулю реакции моста, но направлена вниз.
автомобиля на мост равна по модулю реакции моста, но направлена вниз.
Поскольку вес автомобиля  равен
равен

то, если мост выпуклый, сила давления автомобиля на него уменьшается по сравнению с тем случаем, когда автомобиль движется по горизонтальному мосту.
Зададим дополнительный вопрос: с какой скоростью  должен двигаться автомобиль, чтобы сила давления автомобиля на мост равнялась нулю?
должен двигаться автомобиль, чтобы сила давления автомобиля на мост равнялась нулю?
Поскольку  , то
, то
 или
или
Отсюда

Ответ: 
Задача № 8
Камень весом  который привязан к нитке длиной
который привязан к нитке длиной  , описывает окружность в вертикальной плоскости (рис.1.13).
, описывает окружность в вертикальной плоскости (рис.1.13).

Определить наименьшее значение угловой скорости вращения, при которой нить разорвется, если ее сопротивление разрыву составляет 
Решение. Представим камень в любом положении на дуге окружности. Положение точки определяется углом , который отсчитывается от вертикали  в направлении угловой скорости.
в направлении угловой скорости.
На камень (точку ) действуют сила тяжести и сила натяжения нити .
С точкой свяжем естественную систему координат  и запишем уравнение движения точки в векторной форме:
и запишем уравнение движения точки в векторной форме:

Спроектируем это уравнение на оси выбранной системы координат:

Заметим, что  , а
, а  . То есть уравнение (2) преобразуется в вид:
. То есть уравнение (2) преобразуется в вид:

Отсюда

Из уравнения (3) вытекает, что при  угловая скорость
угловая скорость  является только функцией угла . Наименьшее значение , когда нить разрывается, будет при
является только функцией угла . Наименьшее значение , когда нить разрывается, будет при  , то есть, когда
, то есть, когда  , что соответствует положению камня в точке
, что соответствует положению камня в точке  . Таким образом:
. Таким образом:

Ответ: 
Задача № 9
Трек для испытания автомобилей на кривых отрезках пути имеет виражи, профиль которых (рис.1.14) в поперечном пересечении является прямой, которая наклонена к горизонту так, что внешний край трека выше внутреннего.

Определить, с какой наименьшей и самой большой скоростью можно ехать по виражу, имеющему радиус кривизны  и угол наклона к горизонту ? Коэффициент трения шин о поверхность трека считать известным.
и угол наклона к горизонту ? Коэффициент трения шин о поверхность трека считать известным.
Решение. На автомобиль, который движется по виражу, действуют: сила тяжести , сила нормального давления со стороны поверхности виража и сила трения  , которая направлена вдоль поверхности виража в плоскости, которая перпендикулярна направлению скорости. Возникновение силы трения обуславливается трением колес автомобиля о поверхность виража.
, которая направлена вдоль поверхности виража в плоскости, которая перпендикулярна направлению скорости. Возникновение силы трения обуславливается трением колес автомобиля о поверхность виража.
Рассмотрим движение центра тяжести автомобиля (точка ), считая, что все силы приложены к этой точке. Первым рассмотрим случай движения автомобиля, когда сила трения  (рис.1.14, а). С точки повяжем естественную систему координат
(рис.1.14, а). С точки повяжем естественную систему координат  : нормаль
: нормаль  направим в центр кривизны,
направим в центр кривизны,  – перпендикулярно .
– перпендикулярно .
Запишем уравнение движения автомобиля в векторной форме:

и спроектируем это уравнение на оси координат и :

Из уравнения (1) найдем величину нормальной реакции :

Подставим найденное значение в уравнение (2) и определим скорость автомобиля, когда сила трения о поверхность трека равна нулю:

При максимальной скорости автомобиля  сила трения направлена к нижнему краю виража (рис.1.14, б) и равняется
сила трения направлена к нижнему краю виража (рис.1.14, б) и равняется 
Векторное уравнение движения автомобиля в этом случае будет иметь вид:

Проектируем уравнение (4) на оси  :
:

Уравнение (5) перепишем в виде:

откуда

Подставим значение в уравнение (6) и определим максимальное значение скорости :

Отсюда:

Если скорость автомобиля минимальная  (рис.1.14, в), то трение направлено к верхнему краю трека и проекции уравнения (4) на оси будут иметь вид:
(рис.1.14, в), то трение направлено к верхнему краю трека и проекции уравнения (4) на оси будут иметь вид:

Из уравнений (8) и (9) получаем:

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Содержание:
Динамика материальной точки:
Динамика, как было указано вначале, занимается изучением движения физических тел под действием сил. Предыдущие два раздела теоретической механики, а именно статику и кинематику, можно рассматривать как вспомогательные разделы, облегчающие изучение динамики, хотя вопросы, рассмотренные в них, имеют большое самостоятельное значение.
В кинематике нами была изучена лишь геометрическая сторона движения тел и было дано математическое выражение этого движения. В динамике мы будем рассматривать возникновение этих математических соотношений с учетом тех причин и условий, которые вызывают определенный характер движения; при этом нам придется ввести ряд дополнительных понятий, Например: масса, работа и пр.
Что касается статики, то в этом разделе механики были изучены главным образом вопросы равновесия тел, а равновесие можно рассматривать как частный случай движения. Поясним сказанное. Пусть на свободную материальную точку действуют 

Частный же случай, соответствующий равновесию или прямолинейному и равномерному движению точки, будет выражаться равенством:

Отсюда следует, что выводы статики являются лишь частными случаями тех положений, которые будут даны в динамике.
Исходя из этого, статику можно было бы изучать совместно с динамикой, где рассматриваются самые общие законы механического движения.
В своем развитии механика прошла три периода. В первый период, самый продолжительный, до Галилея и Ньютона, механика развивалась главным образом в области статики. Во второй период, начатый Галилеем и Ньютоном (XVI—XVII вв.), основные вопросы, связанные с изучением механического движения тел, были уже окончательно разрешены, круг этих вопросов является содержанием классической механики.
Основные законы классической механики, сформулированные Ньютоном, были опубликованы в 1687 г. в его сочинении «Математические начала натуральной философии». Однако классическая механика, получившая свое развитие на основе чисто механических принципов, оказалась ограниченной и не была в состоянии разрешить вопросы, связанные с изучением других форм движения материи (тепловая энергия, электрическая и пр.). Поэтому во второй период, наряду с развитием классической механики, ряд выдающихся ученых того времени работает также и в области физики. С открытием выдающимся русским ученым М. В. Ломоносовым закона сохранения энергии начинается третий период развития механики.
Как известно из курса физики, закон сохранения энергии в самом общем виде может быть записан так:

где Т — кинетическая энергия;
- П — потенциальная энергия;
- Q — тепловая энергия;
- X— электрическая энергия и т. д.
Из написанного следует:

Первое из этих равенств указывает на постоянство суммы всех видов энергии, второе —на переход одного вида энергии в другой.
Из закона сохранения энергии непосредственно следует, что механическое движение, входящее в выражение закона сохранения энергии в виде слагаемых Т и П, является только одной из форм физических движений материи.
Неудача, постигшая исследователей при построении ими механики электрона на основе выводов классической механики, привела к дальнейшему развитию физики. Эти направления в развитии физики завершились построением теории относительности. С открытием теории относительности выяснилось, что основные законы, сформулированные Ньютоном в его сочинении «Математические начала натуральной философии», оказались только первым приближением, достаточно справедливым тогда, когда скорость в изучаемых явлениях мала по сравнению со скоростью света. Поэтому в тех случаях, когда скорости изучаемых движений велики, как это имеет место, например, при изучении э лектромагнитных взаимодействий, методы классической механики оказываются недостаточными.
Перейдем теперь к изложению основных законов динамики применительно к материальной точке.
Закон первый (принцип инерции)
Материальная точка сохраняет состояние покоя или равномерного и прямолинейного движения, пока приложенные силы не заставят ее изменить это состояние.
Отсюда следует, что покоящейся точке свойственно оставаться в покое, а движущейся прямолинейно и равномерно — сохранять это движение. Такое состояние точки называется инерциальным. Его можно представить себе, если материальную точку мысленно изолировать от воздействия окружающих тел. В этом случае на материальную точку не будет действовать никаких сил и ее скорость по отношению к выбранным осям координат будет оставаться постоянной как по величине, так и по направлению, в частности может быть равной нулю. Такое свойство точки сохранять неизменной величину и направление своей скорости называется инертностью, или инерцией. Это свойство было сформулировано впервые Галилеем. В дальнейшем движение материальной точки или системы мы будем рассматривать по отношению к координатным осям, связанным с Землей, считая ее условно неподвижной.
Если почему-либо точка движется неравномерно или непрямолинейно, то такое движение является результатом действия на точку силы. В указанном случае движения точки, как известно из кинематики, появляется ускорение. Поэтому между силой, сообщающей ускорение, и самим ускорением имеется связь, которая устанавливается вторым законом динамики.
Закон второй (основное уравнение динамики)
Ускорение, сообщаемое материальной точке приложенной к ней силой, имеет направление силы и по величине’пропорционально силе.
Обозначим силу, действующую на материальную точку, через Р, а сообщаемое этой силой ускорение через  ; тогда второй закон может быть представлен следующим равенством:
; тогда второй закон может быть представлен следующим равенством:

Это равенство называется основным уравнением динамики.
Коэффициент пропорциональности  между Р и
между Р и  представляет собой положительный скалярный множитель и называется массой материальной точки.
представляет собой положительный скалярный множитель и называется массой материальной точки.
Из основного уравнения динамики видно, что чем больше  при постоянной силе Р, тем меньше
при постоянной силе Р, тем меньше  .
.
Первый закон динамики легко получается из основного уравнения динамики, как следствие.
В самом деле, при  :
:
откуда  , что и выражает принцип инерции.
, что и выражает принцип инерции.
При сравнении сил, действующих на материальные точки, применяются два способа — статический и динамический.
При статическом способе сравнения сил употребляются различного рода весы; при динамическом способе мы принимаем  ; тогда имеет место соотношение:
; тогда имеет место соотношение:

т. е. силы сравниваются динамически, так же как и вызываемые этими силами ускорения.
Указанные способы применяются также при сравнении масс материальных точек.
При статическом способе сравнения масс полагают  ; тогда:
; тогда:

т. е. статически массы сравниваются между собой так же, как и силы.
Сравнивая массы динамически, полагают  ; тогда:
; тогда:
 .
.
Отсюда следует, что при динамическом сравнении масс, их отношение обратно пропорционально ускорениям.
В том случае, когда свободная материальная точка находится под действием силы тяжести Q, основное уравнение динамики (130) принимает вид:

где  — ускорение силы тяжести, имеющее постоянную величину в данном месте земной поверхности (приблизительно
— ускорение силы тяжести, имеющее постоянную величину в данном месте земной поверхности (приблизительно  ).
).
Из уравнения (131) легко определяется масса тела путем его взвешивания. ‘
При статическом способе сравнения масс материальных точек отношение масс равно отношению весов точек; в этом заключается удобство статического способа сравнения масс.
В дальнейшем при изучении динамики следует обращать внимание на размерность механических величин. В разделе кинематики мы встречались уже с двумя основными единицами: расстоянием и временем; в динамике же к указанным основным единицам присоединяется третья — масса или сила. В зависимости от того, что будет принято в качестве третьей основной единицы — масса или сила, существуют две системы единиц — физическая и техническая.
Размерность всех механических величин, как, например, работы, мощности, момента инерции и пр., следует в дальнейшем выводить из основных единиц (длина, масса, время или длина, сила, время), положенных в основу физической и технической систем единиц.
Размерность наиболее часто встречаемых величин: силы, массы, работы и . мощности, выраженная в физической и технической системах единиц, приведена в таблице 9.
Таблица 9
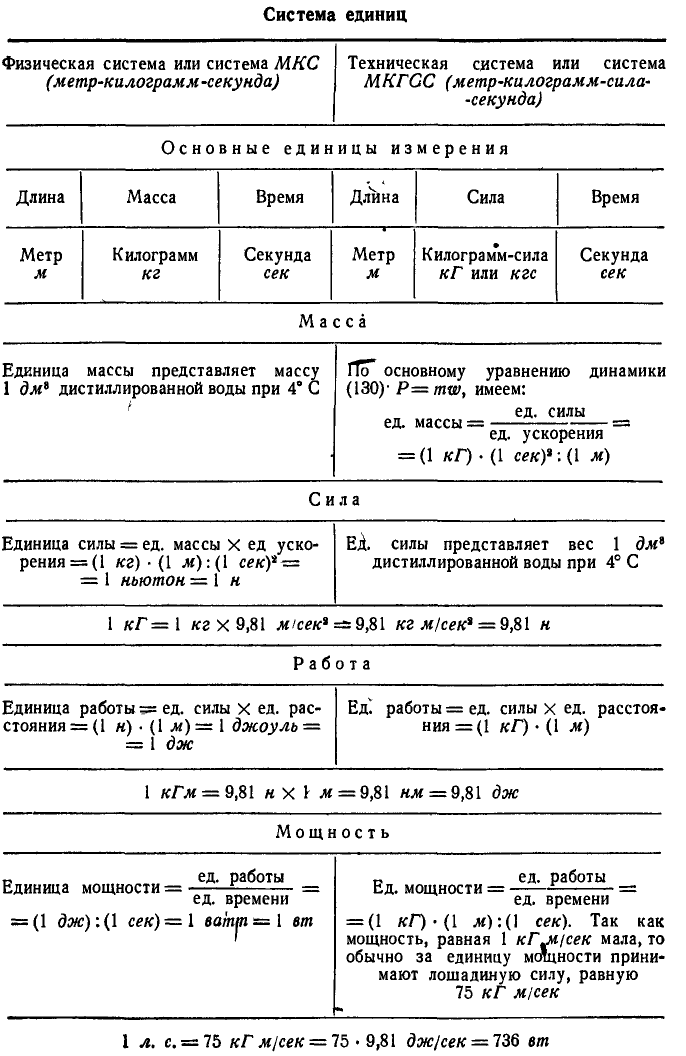
В дальнейшем мы будем пользоваться технической системой единиц или системой МКГСС.
Закон третий (закон независимости действия сил)
Если на Свободную материальную точку действуют несколько сил, то они сообщают ей ускорение, равное геометрической сумме тек ускорений, которые точка получает при действии каждой из этих сил в отдельности.
Пусть ускорения, которые точка получает от действия каждой силы в отдельности  , соответственно равны
, соответственно равны  . Пусть также при одновременном действии всех указанных сил точка получает ускорение, равное
. Пусть также при одновременном действии всех указанных сил точка получает ускорение, равное  ; тогда на основании закона независимости действия сил можно написать:
; тогда на основании закона независимости действия сил можно написать:

Умножим обе части равенства на  ; тогда:
; тогда:

или

Отсюда следует, что при одновременном действии на материальную точку нескольких сил их можно заменить равнодействующей, равной геометрической сумме действующих сил.
Закон четвертый (закон равенства действия и противодействия)
Всякому действию всегда соответствует равное и противоположное противодействие.
Этот закон достаточно подробно был уже изучен в разделе статики.
Основные законы динамики были сформулированы нами для случая свободной точки. Если точка не свободна, то связи могут быть заменены их реакциями.
В самом общем случае движение точки может происходить по линии пересечения двух поверхностей; движения точки по трем поверхностям происходить не может, так как пересечение трех поверхностей определяет положение неподвижной точки.
На точку, движущуюся по линии пересечения двух поверхностей I и II, после замены связей их реакциями, действуют три силы: равнодействующая всех заданных сил Р и нормальные реакции поверхностей  (рис. 243).
(рис. 243).
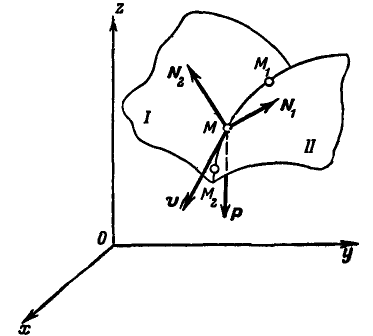
Рис. 243.
В этом случае основное уравнение динамики примет вид:
 .
.
При  точка движется по поверхности, а при
точка движется по поверхности, а при  точка является свободной.
точка является свободной.
Если сами поверхности перемещаются в пространстве, то уравнение каждой из поверхностей, помимо координат х,у и z, будет содержать еще и время t.
Линия, по которой движется точка, есть пересечение этих поверхностей, представляемых4 аналитически уравнениями:

Если же обе поверхности в пространстве неподвижны и не изменяют со временем своей формы, то они будут представлены уравнениями:

Уравнения (133)или (133а)называются уравнениями связи, так как они определяют ту линию, на которой движущаяся точка вынуждена все время оставаться при действии на нее сил. Связи, представленные уравнениями (133а), не зависят от времени, т. е. остаются неподвижными и не меняют своей формы. Такие связи называются стационарными связями.
Дифференциальные уравнения движения материальной точки
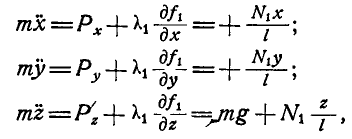
Пусть свободная материальная точка М (рис. 244) совершает движение в пространстве под действием сил  . Напишем для этого случая основное уравнение динамики (130):
. Напишем для этого случая основное уравнение динамики (130):

Проектируя обе части геометрического равенства на выбранные неподвижные координатные оси Ох, Оу и Oz, найдем:
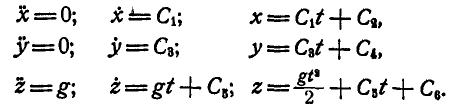
Заменяя проекции ускорений через вторые производные соответствующих координат по времени, получим:
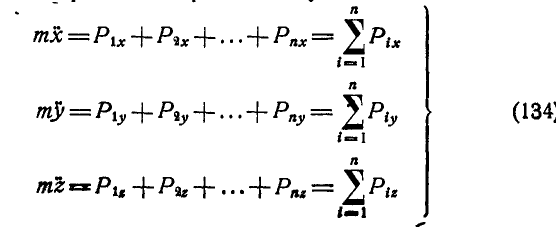
Эти уравнения называются дифференциальными уравнениям движения свободной материальной точки.
Для точки, движущейся в плоскости, можно, очевидно, написать, два дифференциальных уравнения движения, а для случая прямолинейного движения — всего лишь одно.
Вообще число дифференциальных уравнений движения точки всегда равно числу ее кинематических уравнений движения.
При помощи дифференциальных уравнений движения точки, являющихся следствием основного уравнения динамики, можно решать следующие две задачи.
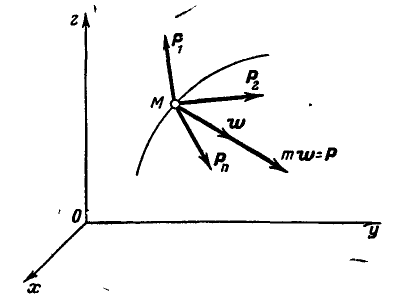
Рис. 244.
Первая задача: по заданным уравнениям движения тбчки  требуется найти силу Р, вызывающую это движение.
требуется найти силу Р, вызывающую это движение.
Вторая задача: п-о заданной силе или системе сил . действующей на точку, требуется найти уравнения движения точки: , которые соответствуют заданным силам.
Ясно, что вторая задача является обратной первой задаче. При решении первой задачи следует каждое из заданных уравнений движения точки продифференцировать два раза по времени t и подставить значения вторых производных х, у и z в уравнения (134). Тогда легко определятся проекции  искомой равнодействующей силы Р на координатные оси.
искомой равнодействующей силы Р на координатные оси.
Решение второй задачи сводится к тому, что мы находим проекции на координатные оси сил, приложенных к точке, и подставляем найденные значения 

 в правую часть уравнений (134).
в правую часть уравнений (134).
Далее, интегрируя дважды каждое из этих дифференциальных уравнений движения, получаем уравнения движения точки: 
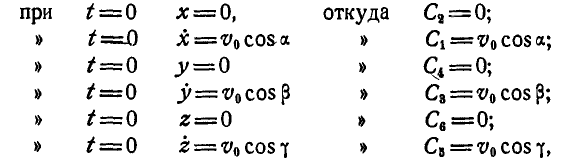
 содержащие шесть постоянных интегрирования. Постоянные интегрирования определятся, если известно начальное положение точки (ее координаты
содержащие шесть постоянных интегрирования. Постоянные интегрирования определятся, если известно начальное положение точки (ее координаты  ), а также проекции начальной скорости
), а также проекции начальной скорости  на координатные оси. Запись для определения постоянных интегрирования
на координатные оси. Запись для определения постоянных интегрирования  следует проводить в следующем порядке:
следует проводить в следующем порядке:


При составлении дифференциальных уравнений движения (134) мы спроектировали основное уравнение динамики (130) на оси Ох, Оу, Oz.
В некоторых случаях геометрическое равенство (130) бывает удобнее проектировать на координатные оси, из которых одна совпадает с направлением касательной к траектории точки, вторая — с направлением главной нормали, а третья — с направлением бинормали.
Из кинематики известно, что проекция ускорения на бинормаль равна нулю, так как лектор ускорения расположен в соприкасающейся плоскости.
Обозначая проекции равнодействующей сил, приложенных к точке на касательную, главную нормаль и бинормаль, соответственно через  , найдем:
, найдем:
Эти уравнения называются естественными уравнениями движения.
Исследуя движение несвободной материальной точки, мы должны будем в число действующих на точку сил включить также и реакции связей  (рис. 243). Тогда дифференциальные уравнения движения несвободной материальной точки примут вид:
(рис. 243). Тогда дифференциальные уравнения движения несвободной материальной точки примут вид:

где  , а также
, а также  — углы, которые составляют нормали к поверхностям I и II в данной точке с осями координат Ох, Оу и Oz.
— углы, которые составляют нормали к поверхностям I и II в данной точке с осями координат Ох, Оу и Oz.
В случае  дифференциальные уравнения для несвободной точки (136) превращаются в уравнения (134) для свободной точки.
дифференциальные уравнения для несвободной точки (136) превращаются в уравнения (134) для свободной точки.
Преобразуем теперь эти уравнения.
Из куpca дифференциальной геометрии известно, что косинусы углов нормалей с осями координат выражаются так:
Аналогично:

где
Обозначая сокращенно произведения  соответственно через
соответственно через  , получим дифференциальные уравнения движения (136) в виде:
, получим дифференциальные уравнения движения (136) в виде:
При  движение точки происходит по поверхности, при
движение точки происходит по поверхности, при  движение точки свободное.
движение точки свободное.
Решим сначала ряд задач на прямолинейное движение точки.
Задача №1
Прямолинейное движение ножа режущего аппарата комбайна в сантиметрах и секундах выражается приближенным уравнением:  . Определить в килограммах силу Р, приводящую нож в движение, в зависимости от расстояния s, приняв вес ножа
. Определить в килограммах силу Р, приводящую нож в движение, в зависимости от расстояния s, приняв вес ножа  .
.
Решение. Нож движется поступательно, а поэтому ускорение любой его точки будет:

Искомая сила Р определится из основного уравнения динамики (130) или по одному из равенств (134):

Задача №2
При погрузке зерна его засыпают на желоб, наклоненный под углом  к горизонту.
к горизонту.
Рассматривая движение по желобу одного зерна и принимая его за материальную точку, найти промежуток времени  по истечении которого зерно соскользнет с желоба, и его скорость в этот момент, если начальная скорость зерна
по истечении которого зерно соскользнет с желоба, и его скорость в этот момент, если начальная скорость зерна  , коэффициент трения скольжения его о желоб
, коэффициент трения скольжения его о желоб  и длина желоба
и длина желоба  .
.
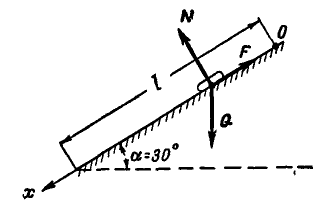
Рис. 245.
Решение. При движении зерна по желобу на него действуют три силы: вес зерна Q, нормальная реакция желоба N и сила трения F (рис. 245). Выбрав начало отсчета О в месте, соответствующем началу движения зерна, и направив ось х по желобу, составим дифференциальное уравнение движения зерна:
или

Интегрируя дважды составленное дифференциальное уравнение, найдем:

Постоянные интегрирования  определятся из начальных условий.
определятся из начальных условий.
Так как в начальный момент  зерно находилось в начале отсчета, а проекция его начальной скорости на ось х равна
зерно находилось в начале отсчета, а проекция его начальной скорости на ось х равна  , то, подставляя значения
, то, подставляя значения  и
и  в полученные уравнения (а), определим постоянные интегрирования
в полученные уравнения (а), определим постоянные интегрирования 
При  , откуда
, откуда 
при  откуда
откуда 
После подстановки найденных значений  в уравнения (а) последние примут вид:
в уравнения (а) последние примут вид:
Полагая во втором из найденных уравнений  , определим время
, определим время  движения зерна по желобу:
движения зерна по желобу:

Подставляя значение  в первое уравнение и полагая
в первое уравнение и полагая  определим скорость зерна
определим скорость зерна  в момент, когда оно проходйт всю длину желоба:
в момент, когда оно проходйт всю длину желоба:

Интегрирование дифференциального уравнения 
 можно было бы произвести, пользуясь определенным интегралом. Перепишем это уравнение в виде:
можно было бы произвести, пользуясь определенным интегралом. Перепишем это уравнение в виде:
и проинтегрируем его два раза. Первый раз (по переменным  и
и  ) в прёделах:
) в прёделах:  тогда получим:
тогда получим:
откуда:

Второй раз проинтегрируем (по переменным х и t) в пределах 

или

Из последнего уравнения определяем, как и выше, время  , а из уравнения скорости
, а из уравнения скорости  — величину
— величину  , подставив вместо
, подставив вместо  найденное значение
найденное значение  .
.
Задача №3
Автомобиль, вес которого равен Q, движется по прямолинейному горизонтальному участку дороги со скоростью  . В некоторый момент двигатель выключили и предоставили автомобилю двигаться по инерции. При движении автомобиля развивается сопротивление, пропорциональное первой степени скорости; коэффициент пропорциональности
. В некоторый момент двигатель выключили и предоставили автомобилю двигаться по инерции. При движении автомобиля развивается сопротивление, пропорциональное первой степени скорости; коэффициент пропорциональности  .
.
Какое расстояние s пройдет автомобиль до остановки, если предположить, что кроме указанного сопротивления никаких других тормозящих сил нет?
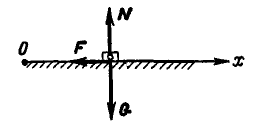
Рис 246.
Решение. При движении автомобиля с выключенным двигателем к нему приложены три силы: вес автомобиля Q, реакция полотна дороги N и сила сопротивления  (рис. 246). Выбрав начало координат в точке О, соответствующей началу выключения двигателя, и направив ось Ох вправо, получим следующее дифференциальное уравнение движения автомобиля:
(рис. 246). Выбрав начало координат в точке О, соответствующей началу выключения двигателя, и направив ось Ох вправо, получим следующее дифференциальное уравнение движения автомобиля:

Произведя интегрирование, найдем:
откуда

При  , откуда
, откуда  , поэтому
, поэтому  , или
, или  .
.
Произведя второй раз интегрирование, получим:
При  , откуда
, откуда  . Поэтому:
. Поэтому:
При  пройденный путь
пройденный путь 
Этот же результат может быть получен также путем применения определенного интеграла. Для этого перепишем составленное выше дифференциальное уравнение движения в виде:
После сокращения на  найдем:
найдем:
 или
или 
Проинтегрировав последнее уравнение (по переменным  и
и  ) в пределах
) в пределах  , получим:
, получим:

откуда находим, что путь, пройденный автомобилем в момент выключения двигателя до остановки равен:
Задача №4
К концу упругой нити прикреплен шарик массы  (рис. 247). Для удлинения нити на 1 см нужно приложить силу
(рис. 247). Для удлинения нити на 1 см нужно приложить силу  Вытянув нить по вертикали вдвое, отпускают шарик без начальной скорости. Пренебрегая весом шарика по сравнению с упругой силой нити и считая натяжение нити пропорциональным ее удлинению, найти закон движения шарика. При решении задачи силами сопротивления пренебречь.
Вытянув нить по вертикали вдвое, отпускают шарик без начальной скорости. Пренебрегая весом шарика по сравнению с упругой силой нити и считая натяжение нити пропорциональным ее удлинению, найти закон движения шарика. При решении задачи силами сопротивления пренебречь.
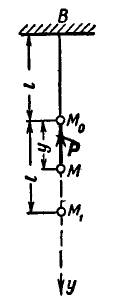
Рис. 247.
Решение. Пусть начальное положение шарика  , а конечное
, а конечное  . Выбрав начало отсчета в точке
. Выбрав начало отсчета в точке  , составим дифференциальное уравнение движения шарика:
, составим дифференциальное уравнение движения шарика:

Для решения полученного уравнения заменим  через
через  и умножим обе части равенства на
и умножим обе части равенства на 
 . После интегрирования найдем:
. После интегрирования найдем:
При  а поэтому
а поэтому 
Подставим полученное значение  и извлечем из обеих частей равенства квадратный корень: |
и извлечем из обеих частей равенства квадратный корень: |
Интегрируем вторично обе части равенства, для чего предварительно разделим переменные:
 или
или 
откуда находим: 
При  , поэтому
, поэтому  , откуда
, откуда  . Окончательно имеем:
. Окончательно имеем:

Перейдем теперь к решению задач на криволинейное движение точки.
Задача №5
Движение тела весом 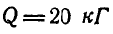 в метрах и секундах выражается уравнениями:
в метрах и секундах выражается уравнениями:

Определить силу, действующую на тело, приняв  .
.
Решение. Считая тело за материальную точку, найдем по формулам (134) проекции  на координатные оси силы Р, действующей на тело:
на координатные оси силы Р, действующей на тело:

но так как 



 , то
, то

Величина и направление силы Р определятся по формулам:

Из уравнений движения следует, что точка движется равномерно по окружности радиусом 5 м с ускорением, направленным к центру окружности  , а поэтому на основании уравнения (130) заключаем, что и сила
, а поэтому на основании уравнения (130) заключаем, что и сила  направлена, так же как и ускорение
направлена, так же как и ускорение  , к центру окружности.
, к центру окружности.
Задача №6
Движение тела массой  в метрах и секундах выражается уравнениями:
в метрах и секундах выражается уравнениями:  Определить силу, действующую на тело, принимая его за материальную точку.
Определить силу, действующую на тело, принимая его за материальную точку.
Ответ: тело находится под действием силы тяжести Q = 100 кГ.
Задача. Для сортирования семян применяется центробежная сортировальная установка, представляющая круглый диск, вращающийся вокруг вертикальной оси, перпендикулярной к плоскости диска. Диск имеет радиальные перегородки, вдоль которых под действием центробежных сил перемещаются сортируемые семена. Скорость, с которой семена сходят с диска, равна  и направлена горизонтально; высота падения семян
и направлена горизонтально; высота падения семян  Определить дальность s полета семени в случаях, когда сопротивлением воздуха можно пренебречь, а также когда при падении семени развивается сопротивление
Определить дальность s полета семени в случаях, когда сопротивлением воздуха можно пренебречь, а также когда при падении семени развивается сопротивление  , направленное противоположно скорости
, направленное противоположно скорости  . Масса одного семени
. Масса одного семени  , a
, a  — заданный постоянный коэффициент.
— заданный постоянный коэффициент.
Рис. 248.
Решение. Пусть семя, принимаемое за материальную точку (рис. 248), движется по некоторой кривой.
Проведем координатные оси х и у, выбрав за начало координат точку О, соответствующую началу схода семени с диска.
Во время полета семени при отсутствии сопротивления на него действует одна вертикальная сила тяжести  . Составляя дифференциальные уравнения движения семени (134), можем написать:
. Составляя дифференциальные уравнения движения семени (134), можем написать: 
Сокращая оба уравнения на  и произведя интегрирование, найдем:
и произведя интегрирование, найдем:

Постоянные интегрирования  и
и  определятся из того условия, что в начальный момент семя находилось в начале координат, а поэтому
определятся из того условия, что в начальный момент семя находилось в начале координат, а поэтому  . Так как вектор начальной скорости семени
. Так как вектор начальной скорости семени  при этом горизонтален, то
при этом горизонтален, то  .
.
Из сказанного следует:
Подставив значения постоянных интегрирования в полученные выше уравнения, найдем выражения проекций скоростей и координат движущейся точки (семени) как функций времени:

Исключая из уравнений движения время t, найдем, что траектория семени — парабола:

Дальность полета семени s определится из уравнения траектории путем подстановки: 
При наличии сопротивления  (рис. 248) дифференциальные уравнения (134) будут:
(рис. 248) дифференциальные уравнения (134) будут:

Сокращая на  и умножая на
и умножая на  , получим:
, получим:

Произведя интегрирование, найдем:

Из начальных условий, имеем:
при

откуда
поэтому:

Интегрирующим множителем последних двух уравнений является  .
.
В этом легко можно убедиться, если умножить эти уравнения на  ; тогда получим:
; тогда получим:

Интегрируя первое из этих уравнений, найдем:
При  , следовательно:
, следовательно:

откуда

Умножим второе уравнение на  и, интегрируя его, будем иметь:
и, интегрируя его, будем иметь:
Выражение  интегрируем по частям:
интегрируем по частям:
Поэтому получим:

При  , следовательно
, следовательно  , отсюда
, отсюда

Уравнения (а) и (б) являются уравнениями движения семени. Найдем уравнение траектории полета семени, для чего из уравнений движения (а) и (б) следует исключить время  .
.
Из уравнения (а) имеем:
 или
или 
или
откуда
Подставляя найденное значение  в уравнение (б) и обозначая
в уравнение (б) и обозначая  получим уравнение траектории:
получим уравнение траектории:

Для нахождения дальности полета семени следует в уравнение траектории подставить  и решить это уравнение одним из приближенных способов относительно s.
и решить это уравнение одним из приближенных способов относительно s.
Задача №7
При очистке зерен их пропускают сквозь колеблющееся решето, имеющее отверстия и расположенное горизонтально. Горизонтальная скорость, с которой зерно подходит к краю отверстия, равна  , форма зерна — шар радиуса R (рис. 249).
, форма зерна — шар радиуса R (рис. 249).
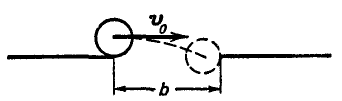
Рис. 249.
Пренебрегая сопротивлением воздуха, определить минимальную длину отверстия  так, чтобы зерно могло проскочить.
так, чтобы зерно могло проскочить.
Указание: минимальная длина отверстия  определится из того условия, что в момент проскакивания зерна через отверстие его центр должен быть расположен на уровне поверхности решета.
определится из того условия, что в момент проскакивания зерна через отверстие его центр должен быть расположен на уровне поверхности решета.
Ответ: 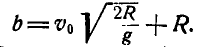
Задача №8
Решить задачу (см. рис. 247) в том случае, когда при вытягивании нити вдвое шарику сообщена вправо начальная скорость  а в точке
а в точке  имеется неподвижное гладкое кольцо, через которое проходит упругая нить (рис. 250).
имеется неподвижное гладкое кольцо, через которое проходит упругая нить (рис. 250).
Рис. 250.
Указание: обозначим угол между направлением нити и осью Ох через  , а длину
, а длину  через
через  , тогда по формулам.(134) наводим:
, тогда по формулам.(134) наводим:

Так как

то

Интегрируя каждое из полученных дифференциальных уравнений аналогично тому, как это было проделано при решении задачи (рис. 247), получим уравнения движения шарика:

Исключая из уравнений движения время  , найдем:
, найдем:
Задача №9
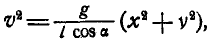
Дождевальная установка для орошения полей состоит из горизонтальных труб с вертикальными ответвлениями; последние оканчиваются сферическими наконечниками, имеющими отверстия на поверхности сферы (рис. 251). Вода под напором выбрасывается во все стороны с одинаковой скоростью  в виде струй, образующих капли воды, которые падают на землю под действием сил тяжести. Пренебрегая сопротивлением воздуха, показать, что во всякий момент движения все капли будут расположены на сфере, центр которой опускается с ускорением свободно падающего тела, а радиус равен
в виде струй, образующих капли воды, которые падают на землю под действием сил тяжести. Пренебрегая сопротивлением воздуха, показать, что во всякий момент движения все капли будут расположены на сфере, центр которой опускается с ускорением свободно падающего тела, а радиус равен  , где
, где  — время, прошедшее с момента выбрасывания капель.
— время, прошедшее с момента выбрасывания капель.
Решение. Пусть капля движется по некоторой кривой. Выберем координатные оси, как показано на рисунке 251. На каждую каплю, принимаемую за материальную точку, будет действовать только сила тяжести, а поэтому дифференциальные уравнения движения будут иметь вид:

После сокращения  и интегрирования получим:
и интегрирования получим:
Для определения постоянных интегрирования получаем:
где  — углы, которые составляет вектор
— углы, которые составляет вектор  с осями координат.
с осями координат.
Подставляя значения постоянных интегрирования в написанные выше уравнения, получим следующие уравнения движения для каждой капли:

Исключая из найденных уравнений движения время  и полагая
и полагая  , найдем, что каждая капля будет расположена на сфере:
, найдем, что каждая капля будет расположена на сфере:

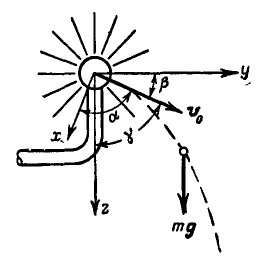
Задача №10
Для очистки и перемещения зерна на механизированных токах применяется зернопульт, который выбрасывает семена с начальной скоростью  , расположенной в плоскости zOy и составляющей с осью Оу угол
, расположенной в плоскости zOy и составляющей с осью Оу угол  (рис. 252).
(рис. 252).
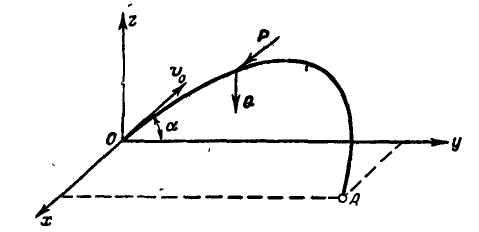
Рис. 252.
Пренебрегая сопротивлением воздуха и принимая зерно за материальную точку, определить координаты зерна в момент его падения на горизонтальную плоскость хОу, если на зерно во время его полета, помимо веса Q, действует постоянное давление ветра Р, направленное параллельно оси Ох.
Решение. Зерно после вылета из зернопульта будет двигаться по пространственной кривой. Положение выбранных координатных осей показано на рисунке 252.
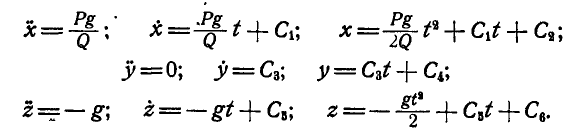
Во время полета зерна на него действуют две силы Q и Р, поэтому дифференциальные уравнения движения будут:

После простых преобразований и интегрирования найдем:
Определим постоянные интегрирования.
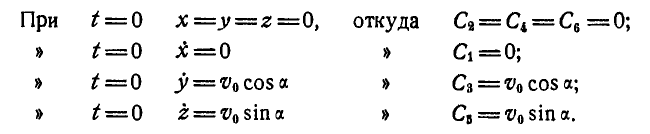
После подстановки найденных значений постоянных интегрирования в полученные выше уравнения движения будем иметь:

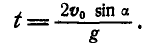
В момент удара зерна о землю (положение А) оно находится в плоскости хОу, поэтому, полагая  , найдем, что время падения зерна:
, найдем, что время падения зерна:
Подставляя найденное значение  в уравнения движения, получим координаты точки А:
в уравнения движения, получим координаты точки А:

Задача №11
Конический маятник состоит из груза М весом  , подвешенного на нити длиной
, подвешенного на нити длиной  в неподвижной точке О, причем нить составляет с вертикалью угол 60°, а груз М описывает окружность в горизонтальной плоскости (рис. 253).
в неподвижной точке О, причем нить составляет с вертикалью угол 60°, а груз М описывает окружность в горизонтальной плоскости (рис. 253).
Определить скорость  груза и натяжение нити
груза и натяжение нити 
Решение. Связью для груза М является нить ОМ, допускающая движение груза по сфере радиуса  Отсюда, обозначив координаты точки М через
Отсюда, обозначив координаты точки М через  , найдем уравнение ее связи:
, найдем уравнение ее связи:

или

Точка М движется по одной поверхности, поэтому, полагая в уравнениях (137)  , получим:
, получим:
где

Перед  взят знак плюс потому, что мы предполагаем, что реакция нити направлена в сторону внешней нормали.
взят знак плюс потому, что мы предполагаем, что реакция нити направлена в сторону внешней нормали.
После подстановки значений  в последнее дифференциальное уравнение, определим из него реакцию нити .
в последнее дифференциальное уравнение, определим из него реакцию нити .

Так как мы направили реакцию в сторону внешней нормали, то знак минус указывает на то, что реакция будет направлена в сторону внутренней нормали (т. е. к точке О закрепления нити).
Для нахождения скорости груза продифференцируем два раза по  уравнение его связи; тогда получим:
уравнение его связи; тогда получим:

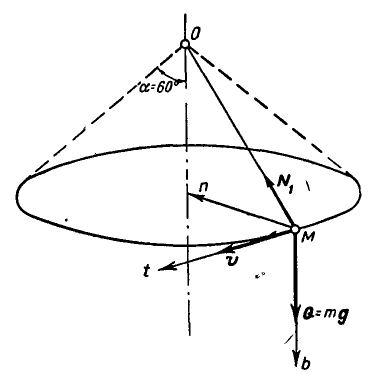
Рис. 253.
Здесь 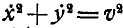 , а значения
, а значения  и
и  найдем из первого и второго дифференциальных уравнений движения после подстановки в них найденного значения
найдем из первого и второго дифференциальных уравнений движения после подстановки в них найденного значения 
где  откуда
откуда

Эта же задача может быть решена проще, если воспользоваться естественными уравнениями движения (135). Проведем через точку М (рис. 253) естественные оси  и спроектируем силы, приложенные к точке М, вес Q и реакцию
и спроектируем силы, приложенные к точке М, вес Q и реакцию  на эти оси; тогда получим:
на эти оси; тогда получим:

откуда находим:

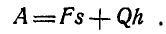
Работа сил, приложенных к материальной точке
Для характеристики эффекта действия на материальную точку силы в зависимости от пути, на котором она действует, вводится понятие ее работы. Остановимся на понятии работы силы в самом общем случае.
Элементарной работой силы на элементарном перемещении называется произведение силы на элементарное перемещение и на косинус угла между направлениями силы, и перемещения (или скорости).
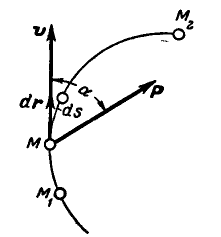
Рис. 254.
Если обозначить элементарную работу через dA, а вектор перемещения, соответствующий бесконечно малой дуге ds и направленный по касательной в сторону движения, через dr (рис. 254), то по определению:

Для вычисления полной работы А силы Р на некотором перемещении (рис. 254) следует взять сумму бесконечно большого числа бесконечно малых элементарных работ на каждом из элементарных участков ds; тогда получим:

При подсчете суммы (139) иногда бывает полезно представить выражение элементарной работы через проекции силы Р и вектора перемещения dr на координатные оси. Так как элементарная работа (138) представляет собой скалярное произведение Р на dr, то на основании свойства скалярного произведения (9):

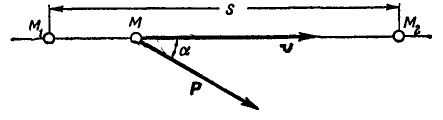
Рис. 255.
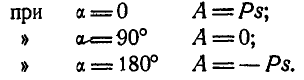
В случае прямолинейного перемещения и постоянства действующей силы (рис. 255) полная работа А на пути  найдется из формулы (139):
найдется из формулы (139):

Работа А положительна, если  и отрицательна, если
и отрицательна, если  :
:
Если на точку М действует несколько сил  (рис. 256), то, заменяя их
(рис. 256), то, заменяя их
одной равнодействующей, можно написать: 
Умножив скалярно обе части последнего равенства на dr, получим:

или на основании равенства (138):

откуда

т. е. работа равнодействующей нескольких сил равна алгебраической сумме работ составляющих.
Наряду с понятием работы вводят понятие мощности, как отношения элементарной работы к бесконечно малому промежутку времени, в течение которого проведена работа. Обозначив мощность через N, можем написать:

т. е. мощность равна скалярному произведению силы на скорость.
Задача №12
Показать, что работа силы тяжести зависит только от крайних положений, между которыми происходит перемещение точки приложения силы, и не зависит от формы кривой, по которой перемещается эта точка.
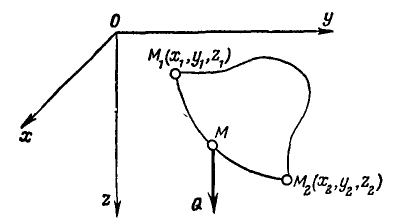
Рис. 257.
Решение. Пусть на материальную точку М (рис. 257), действует сила тяжести Q и пусть крайние положения, между которыми происходит перемещение точки приложения силы, заданы точками: 
При вычислении элементарной работы по формуле (140) замечаем, что  ; поэтому
; поэтому .
.
Полная работа А найдется как сумма элементарных работ:
Обозначим  , где знак плюс соответствует
, где знак плюс соответствует  , а знак минус
, а знак минус  ; тогда получим:
; тогда получим:

Отсюда, работа силы тяжести равна взятому со знаком плюс или минус произведению силы тяжести на величину перемещения по вертикали ее точки приложения.
Если перемещение происходит вверх, то А < 0, а если вниз, то А > 0.
Задача №13
Вычислить работу упругой силы пружины при вытягивании ее конца на величину h, если известно, что сила упругости пружины пропорциональна ее удлинению (или укорочению).
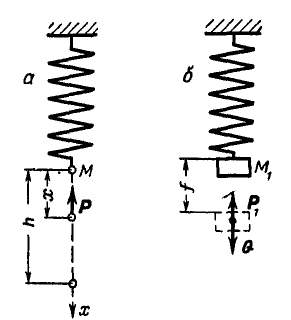
Рис. 258.
Решение. При вытягивании конца пружины М на величину х (рис. 258, а) возникает упругая реакция пружины Р, направленная вертикально вверх. Так как по условию упругая сила пружины Р пропорциональна ее вытягиванию х, то  , где с — постоянный коэффициент, характеризующий степень жесткости пружины.
, где с — постоянный коэффициент, характеризующий степень жесткости пружины.
Применим формулу (140) к нахождению элементарной работы упругой силы: 
Полная работа упругой силы найдется по формуле (139):
или

Для определения коэффициента жесткости с проделывают следующий опыт: к концу  пружины (рис. 258, б) подвешивают известный нам груз Q, который, вытянув пружину на некоторую величину
пружины (рис. 258, б) подвешивают известный нам груз Q, который, вытянув пружину на некоторую величину  , уравновесится силой упругости пружины
, уравновесится силой упругости пружины  .
.
Очевидно, что при равновесии  ; но так как
; но так как  , то
, то  ; откуда
; откуда

Задача №14
Какова должна быть наименьшая мощность двигателя для того, чтобы груз весом Q=10 т при равномерном движении его поднять вверх по наклонной плоскости на высоту  в течение
в течение  . Коэффициент трения груза о плоскость
. Коэффициент трения груза о плоскость  , угол наклона плоскости
, угол наклона плоскости  и коэффициент полезного действия двигателя
и коэффициент полезного действия двигателя  .
.
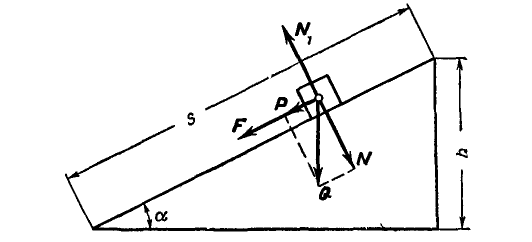
Рис. 259.
Решение. При подъеме груза по плоскости приходится преодолевать сопротивление сил: веса груза Q и силы трения F (рис. 259). Найдем работу А этих сил при подъеме груза на высоту h:
Работа силы  равна нулю, так как
равна нулю, так как  .
.
Но так как

то

Искомая мощность двигателя в лошадиных силах с учетом коэффициента полезного действия будет:

Теорема кинетической энергии материальной точки
Интегрирование дифференциальных уравнений движения точки (134), (135), (137) легко выполнимо лишь в частных случаях.
В большинстве случаев решение задач динамики весьма облегчается применением так называемых общих теорем динамики, а именно: теоремы кинетической энергии, количества движения и моментов количества движения.
Все эти теоремы выражают зависимость между координатами точки, скоростью и временем и называются первыми интегралами уравнений движения точки. Они получаются в результате различных преобразований дифференциальных уравнений движения.
В настоящем параграфе рассмотрим теорему кинетической энергии. Кинетической энергией Т материальной точки называется половина произведения ее массы на квадрат скорости:

Кинетическая энергия является величиной скалярной и притом всегда положительной, обращающейся в нуль только в том случае, когда скорость движущейся точки относительно выбранной системы координат равна нулю.
Как видно, кинетическая энергия имеет размерность работы и является мерой механического движения, которое при известных условиях способно превратиться в эквивалентное количество другого вида движения (электрическая энергия, тепловая и пр.). При движении точки ее скорость  меняется, а поэтому изменяется и кинетическая энергия. Найдем это изменение. Пусть на несвободную точку М действует равнодействующая заданных сил Р; действие же связи заменим ее реакциями
меняется, а поэтому изменяется и кинетическая энергия. Найдем это изменение. Пусть на несвободную точку М действует равнодействующая заданных сил Р; действие же связи заменим ее реакциями  (рис. 243).
(рис. 243).
Умножим теперь уравнения (137) соответственно на dx, dy и dz и сложим их:
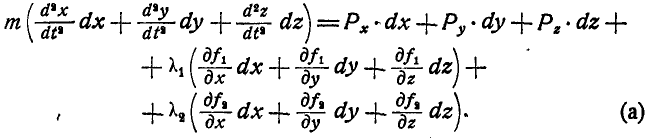
В случае свободной точки, когда

Для точки не свободной, когда  (движение по поверхности), или когда
(движение по поверхности), или когда  (движение по линии), уравнение (а) обращается в уравнение (б) только при условиях:
(движение по линии), уравнение (а) обращается в уравнение (б) только при условиях:
Сравнивая эти условия с теми, которые получаются от дифференцирования уравнений связи:

в виде:
замечаем, что последние принимают вид предыдущих условий только при  когда связи не изменяются со временем, т. е. когда поверхности, на линии пересечения которых находится движущаяся точка, не перемещаются в пространстве и не изменяют своей формы.
когда связи не изменяются со временем, т. е. когда поверхности, на линии пересечения которых находится движущаяся точка, не перемещаются в пространстве и не изменяют своей формы.
Итак, теорема кинетической энергии применима в том случае, когда связи стационарны, т. е. уравнения их не содержат времени t.
Для преобразования уравнения (б) запишем очевидное равенство:

Тогда уравнение (б) принимает вид:

т. е. бесконечно малое изменение кинетической энергии равно элементарной работе сил, приложенных к точке на одном и том же бесконечно малом ее перемещении. Для нахождения изменения кинетической энергии точки на некотором участке (рис. 243) следует произвести на этом участке суммирование всех элементарных изменений кинетической энергии и работы.
Обозначив скорость точки в положении  через
через  а в положении
а в положении  через
через  , найдем:
, найдем:

Следовательно, изменение кинетической энергии материальной точки на некотором ее перемещении равно сумме работ приложенных к ней сил на том же перемещении.
В этом заключается теорема кинетической энергии точки. Применение этой теоремы для решения ряда задач удобно тем, что сюда входят только начальная и конечная скорости движущейся точки.
Задача №15
Какую скорость надо сообщить шарику М, прикрепленному к жесткому невесомому стержню, чтобы последний повернулся в плоскости чертежа вокруг О на заданный угол а (рис. 260).
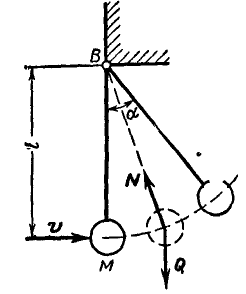
Рис. 260.
Решение. При движении шарика на него действуют две силы: его вес Q и реакция стержня N. Уравнение кинетической энергии (147) в нашем случае примет вид  .
.
Здесь конечная и начальная скорости шарика соответственно равны:  , а работа реакции N равна нулю, так как при движении шарика сила N все время перпендикулярна
, а работа реакции N равна нулю, так как при движении шарика сила N все время перпендикулярна  . Величина скорости
. Величина скорости  будет:
будет:

Задача №16
Тело А (рис. 261) весом Q кГ спускается без начальной скорости по гладкой цилиндрической поверхности, представленной на чертеже в виде четверти окружности радиуса  . Далее, тело А начинает двигаться по горизонтальной шероховатой плоскости и, пройдя расстояние s, вследствие трения останавливается. Найти величину s, если коэффициент трения тела А о плоскость
. Далее, тело А начинает двигаться по горизонтальной шероховатой плоскости и, пройдя расстояние s, вследствие трения останавливается. Найти величину s, если коэффициент трения тела А о плоскость  .
.
Указание: применяем для тела А, принятого нами за материальную точку, два раза теорему кинетической энергии для двух участков пути — криволинейного АВ и прямолинейного ВС.
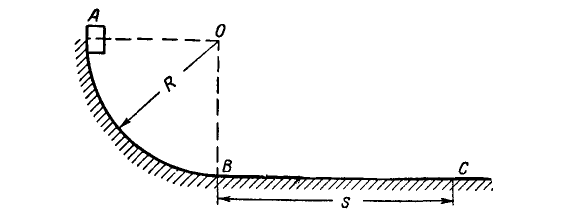
Рис. 261.
В первом случае определяем скорость тела в положении В:
Принимая эту скорость для участка ВС за начальную, находим из уравнения (147):
откуда
Задача №17
При статическом загружении пружины грузом Q=200 кГ осадка равна  . Пренебрегая массой пружины, найти ее наибольшую осадку h в двух случаях:
. Пренебрегая массой пружины, найти ее наибольшую осадку h в двух случаях:
1) когда груз Q положен на пружину и опущен без начальной скорости;
2) когда груз падает на пружину без начальной скорости с высоты H = 8 см.
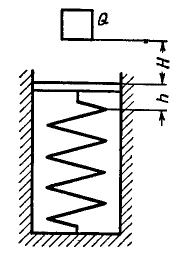
Рис. 262.
Решение. Найдем сначала осадку пружин h для того случая, когда на нее падает груз Q с высоты Н (рис. 262). Для нахождения h удобнее всего применить к падающему грузу теорему кинетической энергии точки на пути  .
.
В правую часть уравнения (147) в нашем случае войдет работа двух сил, а именно—силы тяжести Q на участке  и упругой силы пружины на участке
и упругой силы пружины на участке  В левой же части уравнения (147) будет стоять нуль, так как начальная и конечная скорости груза равны нулю.
В левой же части уравнения (147) будет стоять нуль, так как начальная и конечная скорости груза равны нулю.
На основании сказанного, а также на основании формул (143), (144) и (147) находим:
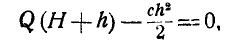
Подставим вместо с его значение по формуле (145) и сократим все уравнения на Q; тогда получим квадратное уравнение:

откуда

Перед корнем будет знак  , так как осадка пружины должна быть величиной положительной.
, так как осадка пружины должна быть величиной положительной.
Полагая  , найдем осадку пружины для случая, когда груз Q положен на пружину и отпущен без начальной скорости:
, найдем осадку пружины для случая, когда груз Q положен на пружину и отпущен без начальной скорости: 
Задача №18
При механизации животноводческих ферм применяется механический разгрузчик, представляющий саморазгружающуюся вагонетку, вес которой вместе с грузом равен  .
.
Груженая вагонетка скатывается без начальной скорости по наклонной плоскости, составляющей с горизонтом угол а = 30° с высоты Н и ударяется о две упорные пружины, расположенные в конце плоскости (рис. 263). В момент наибольшего сжатия пружин вагонетка автоматически разгружается и под действием упругих сил пружин поднимается на ту же высоту Н, причем вес порожней вагонетки равен  .
.
Зная, что коэффициент трения при качении вагонетки  и пренебрегая размерами вагонетки, определить соотношение между весами
и пренебрегая размерами вагонетки, определить соотношение между весами  .
.
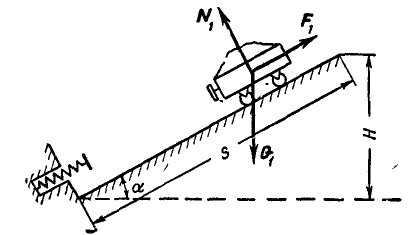
Рис. 263.
Решение. Во время движения вагонетки вниз по наклонной плоскости на нее действуют три силы: вес вагонетки , нормальная реакция плоскости
, нормальная реакция плоскости  и сила трения
и сила трения  (рис. 263), а в момент сжатия пружин — еще и сила упругости пружин.
(рис. 263), а в момент сжатия пружин — еще и сила упругости пружин.
Обозначим жесткость пружин через с, а их наибольшее сжатие через h; тогда, принимая вагонетку за материальную точку и применяя к ее движению на участке  теорему кинетической энергии (147), получим:
теорему кинетической энергии (147), получим:

Начальная и конечная скорости вагонетки приняты равными нулю.
При движении вагонетки вверх по наклонной плоскости сила трения  направлена в сторону, противоположную силе
направлена в сторону, противоположную силе  , а работа упругих сил пружин будет уже положительная; поэтому уравнение (147) примет вид:
, а работа упругих сил пружин будет уже положительная; поэтому уравнение (147) примет вид:

Решая совместно полученные уравнения, находим:

Задача №19
Математический маятник состоит из грузика М (принимаемого нами за материальную точку), подвешенного на нерастяжимой и невесомой нити длиной  к неподвижной точке О (рис. 264). Маятник отклонили от вертикали на угол
к неподвижной точке О (рис. 264). Маятник отклонили от вертикали на угол  и отпустили без начальной скорости.
и отпустили без начальной скорости.
Для положения, когда нить составляет с вертикалью угол  , определить величину углового ускорения
, определить величину углового ускорения  а также реакцию нити N, если вес грузика равен Q кГ.
а также реакцию нити N, если вес грузика равен Q кГ.
Рис. 264.
Решение. Применим для решения задачи естественные уравнения движения (135). Пусть в момент  маятник составляет с вертикалью угол
маятник составляет с вертикалью угол  , а грузик, движущийся по дуге окружности радиуса
, а грузик, движущийся по дуге окружности радиуса  , занимает положение М (рис. 264). Проведем через точку М оси
, занимает положение М (рис. 264). Проведем через точку М оси  , совпадающие с направлениями касательной и главной нормали к траектории точки М; тогда естественные уравнения движения (135) будут:
, совпадающие с направлениями касательной и главной нормали к траектории точки М; тогда естественные уравнения движения (135) будут:

Подставляя значения  и, полагая
и, полагая  , найдем:
, найдем:

Решим эти уравнения относительно  и N:
и N:

Вообще же:
Для определения скорости шарика  соответствующей углу
соответствующей углу  , применим теорему кинетической энергии:
, применим теорему кинетической энергии:

откуда

Подставляя значение скорости  в выражение, найденное для реакции N, можем написать:
в выражение, найденное для реакции N, можем написать:

При 

Консервативное поле и потенциальная энергия материальной точки
Природа возникновения сил, действующих на материальную точку, может быть различной. Так, при движении точки по шероховатой поверхности возникает сила трения, зависящая от нормальной реакции поверхности, которая, в свою очередь, зависит от скорости движения точки и других факторов. Аналогично при движении точки в сплошной среде возникает сила сопротивления среды, зависящая от скорости движения точки.
Однако имеется особая категория сил, обладающих тем свойством, что их величина и направление зависят только от положения точки (ее координат).
Из указанной категории сил мы рассмотрим только такие силы, работа которых не зависит от формы кривой, по которой происходит перемещение их точки приложения.
Такие силы называются консервативными, а область или часть пространства, где действуют эти силы, называется консервативным полем.
Примером силы, действующей в консервативном поле, может служить сила упругости пружины, зависящая от расстояния точки пружины от равновесного положения, соответствующего отсутствию деформации.
Точно так же величина и направление силы тяжести, действующей на точку, зависят от положения самой точки, а отсюда пространство вблизи земной поверхности является консервативным полем для сил тяжести.
Обратимся теперь к вычислению работы силы, действующей в консервативном поле.
Введем понятие силовой функции, под которой будем понимать такую функцию координат точки, полный дифференциал которой представляет элементарную работу консервативной силы. Обозначив ее через U, будем иметь:

с другой стороны:

откуда

или

Итак, проекции консервативной силы равны частным производным от силовой функции по соответствующим координатам.
Из равенств (148) следует:
Но, так как

то, составляя разности, найдем следующий признак консервативности силы:
Вычислим теперь полную работу силы, действующей в консервативном поле, при перемещении точки между положениями и
и 
Пусть в положении  , силовая функция имеет значение
, силовая функция имеет значение  , а в положении
, а в положении  — значение
— значение  ; тогда полная работа силы на пути
; тогда полная работа силы на пути  равна разности этих значений:
равна разности этих значений:

Значения силовой функции U в различных точках поля, вообще говоря, различны. Положим, в некоторой точке поля М (х, у, z) силовая функция имеет значение С, т. е. U (x, у, z) = C.
Это равенство представляет собой уравнение поверхности с параметром С.
Такая поверхность, на которой расположены точки, имеющие одно и то же значение С силовой функции, называется поверхностью уровня или эквипотенциальной поверхностью.
Давая параметру С всевозможные значения  , мы получим бесчисленное множество поверхностей уровня. Отсюда — потенциальное поле можно представить состоящим из отдельных слоев, имеющих каждый постоянное значение силовой функции.
, мы получим бесчисленное множество поверхностей уровня. Отсюда — потенциальное поле можно представить состоящим из отдельных слоев, имеющих каждый постоянное значение силовой функции.
При С=0 поверхность уровня проходит через нулевое положение  . Во всех точках такой поверхности силовая функция равна нулю.
. Во всех точках такой поверхности силовая функция равна нулю.
Из формулы (149) следует, что в каждой точке консервативного поля направление силы поля, действующей на точку, нормально к поверхности уровня, проходящей через эту точку.
В самом деле, пусть точка М лежит на поверхности уровня с параметром С (рис. 265). Дав точке М элементарное перемещение по поверхности уровня  , найдем:
, найдем:

откуда  поэтому сила Р перпендикулярна также и поверхности уровня.
поэтому сила Р перпендикулярна также и поверхности уровня.
Силовая функция точки, взятая со знаком минус, называется потенциальной энергией точки.
Рис. 265. Рис. 266.
Обозначая потенциальную энергию точки  через
через  , можем написать:
, можем написать:

Пусть теперь точка М движется в консервативном поле под действием силы Р (рис. 266).
Обозначив скорости движущейся точки в положениях  и
и  соответственно через
соответственно через  применим к точке М для участка пути
применим к точке М для участка пути  теорему кинетической энергии:
теорему кинетической энергии:

где  — значения потенциальной энергии точки М в положениях
— значения потенциальной энергии точки М в положениях  .
.
Далее имеем:
Но так как положения были выбраны нами произвольно, то отсюда следует:
т. е. при действии на материальную точку консервативных сил полная анергия материальной точки сохраняет постоянную величину.
В этом заключается закон сохранения энергии.
Импульс силы и теорема количества движения материальной точки
Приступая к выводу теоремы количества движения, остановимся на понятиях импульса силы и количества движения материальной точки.
Пусть на материальную точку М (рис. 256) действуют силы  ; заменим эти силы их равнодействующей Р:
; заменим эти силы их равнодействующей Р:

Тогда элементарным импульсом силы Р за бесконечно малый промежуток времени dt называется вектор dS, равный произведению силы Р на dt:

Из геометрического равенства равнодействующей силы и сил составляющих следует:

Импульсом силы Р за промежуток  называется вектор S, равный геометрической сумме элементарных импульсов:
называется вектор S, равный геометрической сумме элементарных импульсов:
откуда

или, обозначая импульсы составляющих сил через  , найдем:
, найдем:

Итак, импульс равнодействующей нескольких сил равен геометрической сумме импульсов сил составляющих.
Установим теперь понятие количества движения.
Количеством движения материальной точки М называется вектор, равный произведению ее массы на скорость и имеющий направление скорости.
Обозначим массу движущейся точки через  , скорость ее через
, скорость ее через  и вектор количества движения через К; тогда по определению имеем:
и вектор количества движения через К; тогда по определению имеем:

Скорость движущейся точки с течением времени изменяется, а поэтому изменяется также и ее количество движения. Найдем это изменение.
Напишем основное уравнение динамики:
Но так как
 то
то 
или

Итак, векторная производная по времени от количества движения равна равнодействующей сил, приложенных к точке.
В этом заключается теорема количества движения.
Изменение количества движения за промежуток  , очевидно, равно:
, очевидно, равно:
откуда

где  — скорости точки M, когда она находится в положениях
— скорости точки M, когда она находится в положениях  , соответствующих моментам
, соответствующих моментам  (рис. 256).
(рис. 256).
Уравнение (152а) может быть записано в форме проекций на координатные оси:

Итак, изменения проекций количества движения за некоторый промежуток времени равны сумме одноименных проекций импульсов приложенных сил за тот же промежуток времени.
Уравнениями (152а) и (152б) часто пользуются при решении задач.
Задача №20
Материальная точка А весом Q = 10 кГ движется по окружности с постоянной скоростью  в направлении, указанном стрелкой (рис. 267). Найти импульс
в направлении, указанном стрелкой (рис. 267). Найти импульс  силы, действующей на точку А, в двух случаях:
силы, действующей на точку А, в двух случаях:
1) когда точка А перейдет в положение  , пройдя четверть окружности;
, пройдя четверть окружности;
2) когда точка А перейдет в положение , пройдя полуокружность.
, пройдя полуокружность.
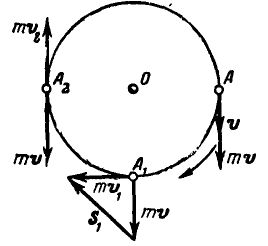
Рис. 267.
Решение. Импульс силы, действующей на точку А за время прохождения точкой пути  , найдется по формуле (152а):
, найдется по формуле (152а):

Отсюда, определение  сводится к нахождению разности векторов
сводится к нахождению разности векторов  и
и  , что легко проводится путем построения (рис. 267).
, что легко проводится путем построения (рис. 267).
Так как  , то
, то  , поэтому:
, поэтому:

Аналогично находится импульс силы  за время прохождения точкой пути
за время прохождения точкой пути  :
:

Задача №21
Пренебрегая сопротивлением воздуха, определить время t и высоту h поднятия материальной точки, брошенной вверх со скоростью  .
.
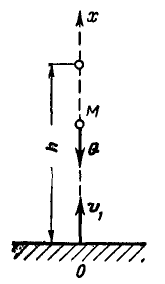
Рис.268.
Решение. Для нахождения времени t применим теорему количества движения в форме проекций, для чего возьмем начало отсчета О в точке, соответствующей началу толчка, а ось Ох направим по вертикали вверх (рис. 268). По первой из формул (152б) находим:

В нашем случае 

поэтому  откуда:
откуда:

Высота поднятия h определяется по теореме кинетической энергии:
Задача №22
Тело весом Q = 60 кГ падает с высоты Н = 1 м и входит в землю на глубину h = 1 см. Считая сопротивление земли за время движения постоянным, определить время удара и величину ударной силы, равной силе сопротивления земли.
Решение. Для нахождения силы сопротивления земли Р применим теорему кинетической анергии на пути 
В нашем случае  . Работа силы тяжести на расстоянии
. Работа силы тяжести на расстоянии  положительна; работа силы сопротивления земли на расстоянии h отрицательна.
положительна; работа силы сопротивления земли на расстоянии h отрицательна.
Это дает:

откуда

Для определения времени удара применим теорему количества движения на участке h в форме проекций на вертикальное направление.
По одной из формул (152б) находим:

Здесь  определяется по теореме кинетической энергии аналогично предыдущему.
определяется по теореме кинетической энергии аналогично предыдущему.
Окончательно имеем:

Отсюда видно, что при ударе развивается значительная сила, действующая в продолжение короткого промежутка времени.
Поэтому в теоретической механике часто считают время удара бесконечно малым, а ударную силу бесконечно большой; при этом произведение силы на время (мгновенный импульс) является конечной величиной, измеряемой количеством движения при ударе.
Теорема моментов количества движения материальной точки
Подобно тому, как в статике вводятся понятие момента силы относительно точки, мы можем ввести также в рассмотрение момент вектора количества движения. Обозначим равнодействующую всех заданных сил и реакций связей точки В через Р, а вектор ее количества движения через К (рис. 269).
Пусть положение движущейся точки М в данный момент определяется радиусом-вектором  . Тогда, как известно из статики, момент силы Р относительно точки О будет:
. Тогда, как известно из статики, момент силы Р относительно точки О будет:
Аналогично, моментом количества движения относительно точки О называется вектор L, величина и направление которого определяется векторным произведением  и К, т.е.:
и К, т.е.:

или

Продифференцируем выражение (153) по времени:

Но так как  , а по теореме количества движения
, а по теореме количества движения  , то окончательно имеем:
, то окончательно имеем:

Итак, первая производная по времени от вектора момента количества движения относительно неподвижной точки О равна моменту равнодействующей силы относительно той же точки.
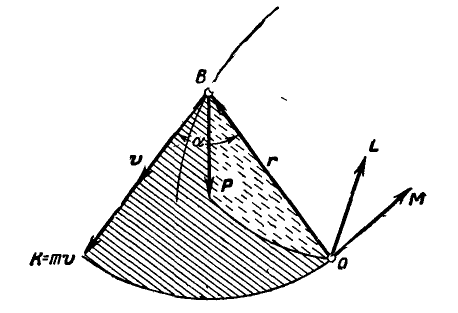
Рис. 269.
В этом заключается теорема моментов количества движения, или теорема о кинетическом моменте точки.
Дадим аналитическое выражение теореме моментов количества движения, для чего спроектируем геометрическое равенство (154) на координатные оси
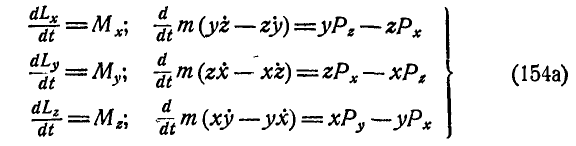
т. е. производная по времени от момента количества движения относительно какой-либо оси равна моменту равнодействующей всех приложенных сил относительно той же оси.
Задача №23
Найти закон качания математического маятника (рис. 270). Во время качаний маятника на него действуют две силы — сила тяжести Q и реакция нити N. Так как N проходит через О, то ее момент относительно оси вращения обращается в нуль.
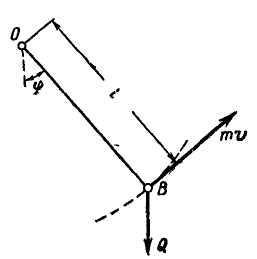
Рис. 270.
Решение. Пусть в данный момент положение качающегося маятника определяется углом  , образованным нитью ОВ с вертикалью. Угол
, образованным нитью ОВ с вертикалью. Угол  с течением времени изменяется. Найдем это изменение, для чего применим теорему моментов количества движения в виде одного из равенств (154а), приняв за ось моментов некоторую ось
с течением времени изменяется. Найдем это изменение, для чего применим теорему моментов количества движения в виде одного из равенств (154а), приняв за ось моментов некоторую ось  , проходящую через О перпендикулярно к плоскости чертежа:
, проходящую через О перпендикулярно к плоскости чертежа:
Здесь 
После подстановки вместо  и
и  их значений получим:
их значений получим:

или
Так как полученное дифференциальное уравнение качаний математического маятника интегрируется при помощи эллиптических функций, то, ограничиваясь случаем малых колебаний маятника, полагаем  ; тогда:
; тогда:

Это дифференциальное уравнение может быть уже легко проинтегрировано (см. задачу к рис. 247).
Для дальнейшего обобщения теоремы моментов количества движения найдем скорость движения точки в полярных координатах.
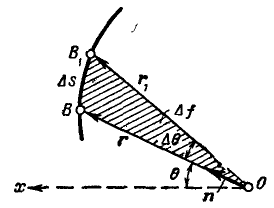
Рис. 271.
Пусть в момент t движущаяся точка занимает положение В (рис. 271), определяемое радиусом-вектором 
Из кинематики известно, что скорость точки  .
.
Но, так как  где
где —единичный вектор радиуса-вектора
—единичный вектор радиуса-вектора  то:
то:

Из векторного анализа известно, что  [см. формулу (21)].
[см. формулу (21)].
Итак, скорость точки, представляющая векторную производную г по t, является геометрической суммой двух составляющих, из которых первая  , направленная по радиусу-вектору, характеризует быстроту изменения его величины; вторая же
, направленная по радиусу-вектору, характеризует быстроту изменения его величины; вторая же  характеризует быстроту изменения радиуса вектора по направлению.
характеризует быстроту изменения радиуса вектора по направлению.
Составляющие  называются соответственно радиальной и трансверсальной компонентами вектора скорости.
называются соответственно радиальной и трансверсальной компонентами вектора скорости.
Секторной скоростью точки В (рис. 271) называют площадь, отнесенную ко времени, описываемую ее радиусом-вектором.
Так как площадь  содержащаяся между двумя бесконечно близко расположенными радиусами-векторами
содержащаяся между двумя бесконечно близко расположенными радиусами-векторами  и
и  , равна:
, равна:

то, заменяя элементарный сектор  круговым с центральным углом
круговым с центральным углом  и радиусом
и радиусом  , найдем:
, найдем:

Отсюда видно, что секторная скорость точки, найденная относительно некоторого неподвижного полюса О, равна половине момента скорости  точки В относительно того же полюса.
точки В относительно того же полюса.
Следовательно, секторную скорость точки можно представить вектором  , равным половине векторного произведения
, равным половине векторного произведения  на
на  :
:

Мы нашли секторную скорость точки, движущейся как угодно в пространстве.
В астрономии, электротехнике и пр. часто приходится вычислять секторную скорость точки, совершающей движение в одной из координатных плоскостей при полюсе в начале координат. В этом случае секторную скорость в каждой из координатных плоскостей можно рассматривать, как секторную скорость точки, представляющей проекцию точки В на соответствующую плоскость.
Обозначая секторные скорости в каждой из координатных плоскостей yOz, xОz и хОу соответственно через  и
и  найдем их величины из формулы (156а):
найдем их величины из формулы (156а):
Впервые понятие секторной скорости было введено в механику Кеплером через его второй закон: радиусы-векторы, соединяющие Солнце с отдельными планетами, описывают в равные времена равные площади. Отсюда следует, что секторная скорость для каждой планеты имеет свое постоянное значение.
Полагая  , по формуле (156) найдем:
, по формуле (156) найдем:
откуда
т. е. площадь сектора возрастает пропорционально времени, а поэтому площади секторов, описываемые в равные промежутки времени, должны быть равны между собой.
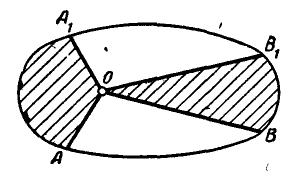
Рис. 272.
Из рисунка 272 видно, что при движении планеты по орбите, представляющей эллипс, в одном из фокусов О которого находится Солнце, площади секторов  и
и  , описанные радиусом—вектором планеты за одно и то же время, должны быть равны между собой; следовательно,
, описанные радиусом—вектором планеты за одно и то же время, должны быть равны между собой; следовательно,  , т. е. чем планета находится ближе к Солнцу, тем она быстрее движется по своей орбите. Введем теперь в равенства (154 а), выражающие теорему моментов количества движения, сектриальные скорости, определяемые по формулам (156б):
, т. е. чем планета находится ближе к Солнцу, тем она быстрее движется по своей орбите. Введем теперь в равенства (154 а), выражающие теорему моментов количества движения, сектриальные скорости, определяемые по формулам (156б):
В последние равенства, выражающие теорему моментов количества движения, входят секторные скорости, зависящие от изменения некоторых площадей, поэтому данную теорему называют также теоремой площадей.
При применении теоремы моментов могут встретиться два частных случая.
1. Положим  . Это может быть в том случае, когда сила Р и ось z расположены в одной плоскости.
. Это может быть в том случае, когда сила Р и ось z расположены в одной плоскости.
Следовательно:

откуда
 или
или 
Т. е. получив интеграл площадей, мы видим, что секторная скорость в плоскости хОу постоянна.
2. Положим  . Это будет в том случае, когда сила проходит все время через полюс О; такая сила называется центральной. Величина центральной силы может меняться по любому закону, в частности она может зависеть от времени, координат, скорости и пр.
. Это будет в том случае, когда сила проходит все время через полюс О; такая сила называется центральной. Величина центральной силы может меняться по любому закону, в частности она может зависеть от времени, координат, скорости и пр.
Здесь мы имеем случай, когда  , а поэтому
, а поэтому  .
.
Отсюда  , и мы получаем уже три интеграла площадей. Так как при действии центральной силы точка движется в плоскости, определяемой начальной скоростью и полюсом О, то оггсюда следует, что траектории при центральных движениях представляют плоские кривые и вектор L перпендикулярен к плоскости, содержащей траекторию точки.
, и мы получаем уже три интеграла площадей. Так как при действии центральной силы точка движется в плоскости, определяемой начальной скоростью и полюсом О, то оггсюда следует, что траектории при центральных движениях представляют плоские кривые и вектор L перпендикулярен к плоскости, содержащей траекторию точки.
Если за плоскость движения точки принять координатную плоскость хОу, то тогда из трех интегралов площадей будет иметь место только один:  , а два других обращаются в тождество: 0=0.
, а два других обращаются в тождество: 0=0.
Следовательно, при действии центральной, силы секторная скорость точки постоянна.
Задача №24
Шарик М весом Q кГ, привязанный к нерастяжимой нити, скользит по инерции по гладкой горизонтальной плоскости; другой конец нити втягивают с постоянной скоростью  в отверстие О на плоскости (рис. 273). Определить закон движения шарика, если известно, что в начальный момент нить была натянута, расстояние между шариком и отверстием равнялось R и начальная скорость шарика равна
в отверстие О на плоскости (рис. 273). Определить закон движения шарика, если известно, что в начальный момент нить была натянута, расстояние между шариком и отверстием равнялось R и начальная скорость шарика равна  .
.
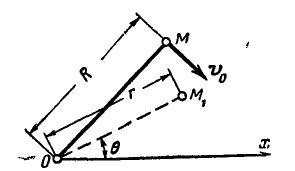
Рис. 273.
Решение. Взяв О за полюс, напишем уравнение связи в полярных координатах  . Единственной силой, действующей на точку М, является сила натяжения нити, проходящая все время через точку О. Так как эта сила центральная, то имеет место интеграл площадей:
. Единственной силой, действующей на точку М, является сила натяжения нити, проходящая все время через точку О. Так как эта сила центральная, то имеет место интеграл площадей:
При  откуда
откуда
Следовательно:
или

где

При  откуда окончательно находим:
откуда окончательно находим:

Задача №25
При своем движении планета описывает эллипс, в одном из фокусов которого О находится Солнце (рис. 272). Когда планета находится на кратчайшем расстоянии от Солнца, она обладает скоростью  .
.
Найти скорость  планеты в противоположной вершине эллипса, если большая полуось и эксцентриситет эллипса соответственно равны а и е.
планеты в противоположной вершине эллипса, если большая полуось и эксцентриситет эллипса соответственно равны а и е.
Решение. Пусть положения планеты в указанных крайних положениях по отношению к точке О определяются соответственно радиусами-векторами  . Так как единственной силой, действующей на планету, является центральная сила притяжения, направленная к точке О, то имеет место интеграл площадей:
. Так как единственной силой, действующей на планету, является центральная сила притяжения, направленная к точке О, то имеет место интеграл площадей:

Так как  и
и  , то можем написать:
, то можем написать:

Откуда получаем:
Колебательное движение материальной точки
С колебательным движением материальных точек и систем часто приходится встречаться в технике. Так, например, элементы машин и сооружений, будучи упругими, под действием приложенных сил способны вибрировать. Иногда вибрации достигают значительной величины и являются уже недопустимыми с точки зрения прочности и нормальной работы машины или сооружения. Поэтому задача заключается в том, чтобы изучить вопросы колебательного движения и тем самым предотвратить те случаи вибраций, которые являются опасными.
Прямолинейное колебательное движение материальной точки
Начнем с изучения прямолинейного колебательного движения материальной точки; при этом рассмотрим следующие случаи.
1. Материальная точка совершает свободные колебания.

Рис. 274.
Колебательное движение точки М (рис. 274) называется свободным, если оно происходит под действием силы Р, пропорциональной удалению точки М от некоторого центра притяжения О и направленной все время к этому центру:

Такая сила называется восстанавливающей.
Постоянный множитель с, очевидно, имеет размерность  и определяет величину восстанавливающей силы в тот момент, когда точка находится на расстоянии единицы от центра притяжения.
и определяет величину восстанавливающей силы в тот момент, когда точка находится на расстоянии единицы от центра притяжения.
Для выяснения характера движения точки М составим дифференциальное уравнение ее движения:

Условимся по поводу знаков для расстояний и сил. Будем считать х положительным, если точка М находится справа от начала отсчета, и отрицательным — если слева. Условимся силу считать положительной, если ее направление (проекция) совпадает с положительным направлением оси Ох и отрицательной — если сила направлена в сторону, противоположную положительному направлению оси Ох. Так, например, в нашем случае силу Р следует взять со знаком минус, а силу Рх со знаком плюс.
Нетрудно видеть, что, соблюдая указанное правило знаков, мы получаем для точки, находящейся в положении М, такое же дифференциальное уравнение движения, что и для точки, находящейся в положении  :
:

что совпадает с предыдущим уравнением. Разделим теперь дифференциальное уравнение на  и обозначим
и обозначим  ; тогда:
; тогда:

Составляем, далее, характеристическое уравнение  . Так как корни его мнимые:
. Так как корни его мнимые:  , то отсюда общий интеграл дифференциального уравнения (158) будет:
, то отсюда общий интеграл дифференциального уравнения (158) будет:

что следует из теории линейных однородных дифференциальных уравнений.
Вместо неизвестных постоянных интегрирования  введем новые
введем новые  положив:
положив:  тогда:
тогда:

Итак, свободное колебательное движение материальной точки является гармоническим (см. § 22). Здесь  — фаза колебаний.
— фаза колебаний.
Постоянные интегрирования представляющие амплитуду колебаний и начальную фазу, определятся из начальных условий:

откуда

Частота свободных колебаний определяется формулой:

Отсюда находим период свободных колебаний:

Из формул (159) и (160) видно, что частота и период свободных колебаний не зависят от начальных условий.
Выше нами было получено дифференциальное уравнение малых качаний математического маятника (155):
Сравнивая это уравнение с выражением (158), находим, что период колебаний математического маятника выразится:

Задача №26
К свободному концу упругого стержня АО, заделанного жестко одним концом, прикреплен груз О весом Q кГ (рис. 275). При отклонении груза на 1 см нужно приложить силу с кГ . Величина с называется жесткостью. Определить, во сколько раз надо изменить вес груза Q, чтобы период его колебаний увеличился в два раза. При решении задачи массой стержня следует пренебречь и колебания груза считать малыми и прямолинейными.
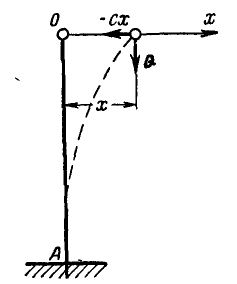
Рис. 275.
Решение. Груз Q совершает свободные колебания. Обозначим груз, при котором период колебаний увеличивается в два раза, через  ; тогда для грузов
; тогда для грузов  периоды колебаний определятся по формуле (160):
периоды колебаний определятся по формуле (160):

Для определения  возведем обе части этих равенств в квадрат и разделим одно равенство на другое, тогда после сокращения найдем:
возведем обе части этих равенств в квадрат и разделим одно равенство на другое, тогда после сокращения найдем:
Задача №27
Определить период колебаний Т груза 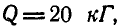 прикрепленного к двум пружинам, имеющим различные жесткости
прикрепленного к двум пружинам, имеющим различные жесткости  (рис. 276).
(рис. 276).
Известно, что для удлинения верхней пружины на 1 см нужна сила 10 кГ, а нижней пружины 5 кГ. При решении задачи силами сопротивления следует пренебречь.
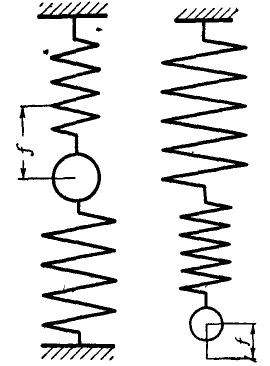
Рис. 276. Рис. 277.
Решение. Жесткости верхней и нижней пружин соответственно равны:  и
и  .
.
Пусть под действием груза Q верхняя пружина вытянулась на  , тогда нижняя пружина сократится на эту же величину. Отсюда сила Q, равная упругой силе пружин, определится:
, тогда нижняя пружина сократится на эту же величину. Отсюда сила Q, равная упругой силе пружин, определится:

где  — приведенная жесткость пружин, равная
— приведенная жесткость пружин, равная  .
.
Период колебаний груза Q будет:


- Заказать решение задач по теоретической механике
Задача №28
Решить предыдущую задачу для того случая, когда пружины, имеющие жесткости  соединены последовательно (рис. 277).
соединены последовательно (рис. 277).
Решение. Пусть под действием силы Q первая пружина вытянется на величину  , а вторая – на
, а вторая – на  . Так как сила, растягивающая каждую пружину, равна Q, то вытягивание каждой из пружин будет:
. Так как сила, растягивающая каждую пружину, равна Q, то вытягивание каждой из пружин будет:
Удлинение обеих пружин равно:

Отсюда приведенная жесткость пружин  будет:
будет:
и период колебаний груза Q:

2. Материальная точка совершает вынужденные колебания.
Колебательное движение точки М (рис. 278) называется вынужденным, когда на нее, помимо восстанавливающей силы  , действуетеще возмущающая сила
, действуетеще возмущающая сила  , выражающаяся функцией времени. В технике наиболее часто приходится встречаться с теми случаями, когда возмущающая сила является периодической функцией вида:
, выражающаяся функцией времени. В технике наиболее часто приходится встречаться с теми случаями, когда возмущающая сила является периодической функцией вида: 
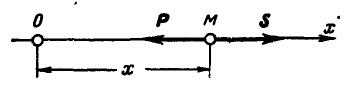
Рис. 278.
Составим дифференциальное уравнение движения точки:

Разделив все уравнение на  , введем обозначения:
, введем обозначения: 
 Тогда дифференциальное уравнение вынужденных колебаний примет вид:
Тогда дифференциальное уравнение вынужденных колебаний примет вид:

Решение линейного неоднородного дифференциального уравнения (162), как известно, складывается из двух решений: общего без правой части, которое нами было получено при рассмотрении свободных колебаний точки, и частного с правой частью. Пусть при  частное решение уравнения (162) будет:
частное решение уравнения (162) будет:

Найдем такие значения  и
и  , которые удовлетворяли бы уравнению (162), для чего в это уравнение подставим вместо х написанное выше выражение:
, которые удовлетворяли бы уравнению (162), для чего в это уравнение подставим вместо х написанное выше выражение:

Сравнивая коэффициенты при  и
и  , находим:
, находим:
Интеграл уравнения без правой части нами был получен выше. Отсюда общее решение дифференциального уравнения (162) вынужденных колебаний будет:

Итак, при одновременном действии восстанавливающей и возмущающей сил, материальная точка совершает движение, составленное из двух гармонических колебаний, из которых первое называется собственным или свободным колебанием, а второе вынужденным колебанием.
Из формулы (163) видно, что амплитуда вынужденных колебаний А будет:

Интересно отметить, что даже при небольшой величине h, т. е. при малой возмущающей силе, амплитуда вынужденных колебаний достигает большой величины, если частоты свободных и вынужденных колебаний k и р близки друг к другу. Наконец, если частоты совпадают, т. е. если  , то
, то  . Это явление называется резонансом.
. Это явление называется резонансом.
Если  , то частное решение уравнения (162) отыскивается в форме:
, то частное решение уравнения (162) отыскивается в форме:

Поступая no предыдущему, найдем:
Поэтому, при  общий интеграл уравнения (162) получается в виде:
общий интеграл уравнения (162) получается в виде:

Отсюда видно, что при равенстве частот, а следовательно, и периодов свободных и вынужденных колебаний амплитуда точки М с течением времени беспредельно возрастает.
Задача №29
К концу  упругого стержня, заделанного другим концом, прикреплена ось вращения груза D, делающего постоянное число оборотов (рис. 279).
упругого стержня, заделанного другим концом, прикреплена ось вращения груза D, делающего постоянное число оборотов (рис. 279).
При каком числе оборотов в минуту груза D вокруг оси может наступить для стержня  явление резонанса, если вес груза в точке
явление резонанса, если вес груза в точке  равен
равен  жесткость стержня с = 2000 кГ/см и вес груза, насаженного на конце стержня
жесткость стержня с = 2000 кГ/см и вес груза, насаженного на конце стержня  , равен Q = 200 кГ.
, равен Q = 200 кГ.
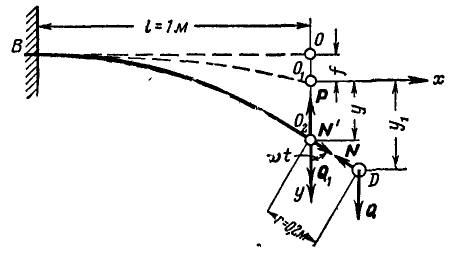
Рис. 279.
Все размеры указаны на чертеже. При решении задачи массами стержней пренебречь.
Решение.
Рассмотрим вертикальное перемещение точек D и  . Груз D, принятый нами за материальную точку, находится под действием двух сил: веса Q и реакции стержня N. На конец балки
. Груз D, принятый нами за материальную точку, находится под действием двух сил: веса Q и реакции стержня N. На конец балки  действуют три силы: одна из них
действуют три силы: одна из них  равна по величине силе N и представляет действие груза D на ось вращения, другая сила Р является силой упругости стержня и равна
равна по величине силе N и представляет действие груза D на ось вращения, другая сила Р является силой упругости стержня и равна  и третья—сила веса
и третья—сила веса  . Выбрав начало координат в точке
. Выбрав начало координат в точке  соответствующей статическому прогибу стержня /
соответствующей статическому прогибу стержня / под действием грузов
под действием грузов  и
и  , составим дифференциальные уравнения движения по оси у для точек D и
, составим дифференциальные уравнения движения по оси у для точек D и  :
:

Из второго уравнения находим:

Но так как по закону «действие равно противодействию» 
 , то, подставляя найденное значение
, то, подставляя найденное значение  в первое уравнение, получим:
в первое уравнение, получим:

Из чертежа видно, что и, кроме того,
и, кроме того,  поэтому после простых преобразований уравнение (а) примет вид:
поэтому после простых преобразований уравнение (а) примет вид:

Сравнивая это уравнение с (162), видим, что конец стержня  совершает вынужденные колебания, при этом квадраты частот свободных и вынужденных колебаний соответственно равны:
совершает вынужденные колебания, при этом квадраты частот свободных и вынужденных колебаний соответственно равны:

Явление резонанса наступит при условии, когда  , а отсюда:
, а отсюда:

3. Колебания материальной точки при наличии сопротивления. Рассмотренная нами теория свободных и вынужденных колебаний материальной точки совершенно не учитывает сопротивления, возникающего при движении точки. Между тем, силы сопротивления оказывают значительное влияние на характер колебательного движения, способствуя иногда быстрому его затуханию.
Рис. 280.
Так, например, если груз, прикрепленный к свободному концу пружины, закрепленной другим концом, вытянуть и отпустить, то он, совершив некоторое число колебаний, под влиянием сил сопротивления, остановится. Изучим сначала влияние сил сопротивления для случая свободных колебаний материальной точки.
Пусть точка М (рис. 280) находится под действием восстанавливающей силы сх и силы сопротивления среды, пропорциональной первой степени скорости движущейся точки и равной  . Составим дифференциальное уравнение движения точки:
. Составим дифференциальное уравнение движения точки:

Разделим все уравнение на  и введем обозначения:
и введем обозначения:
тогда получим окончательный вид дифференциального уравнения Свободных колебаний с учетом сопротивления:

Для нахождения интеграла этого уравнения составим характеристическое уравнение:  и найдем его корни:
и найдем его корни:

Здесь могут встретиться три случая.
а) Случай малого сопротивления, когда  , или, что то же, когда
, или, что то же, когда  .
.
Здесь корни характеристического уравнения получаются мнимые:

Поэтому общий интеграл уравнения (165) будет:

Заменим постоянные интегрирования  и
и  через постоянные
через постоянные  по формулам:
по формулам:

после чего получим:

где 
Постоянные интегрирования  определяются по начальным данным. Из уравнения (166) следует, что точка совершает колебательное движение, причем множитель
определяются по начальным данным. Из уравнения (166) следует, что точка совершает колебательное движение, причем множитель  , стоящий при амплитуде, указывает на то, что колебания затухают с течением времени. Это явление наглядно представлено на графике затухающих колебаний (рис. 281).
, стоящий при амплитуде, указывает на то, что колебания затухают с течением времени. Это явление наглядно представлено на графике затухающих колебаний (рис. 281).
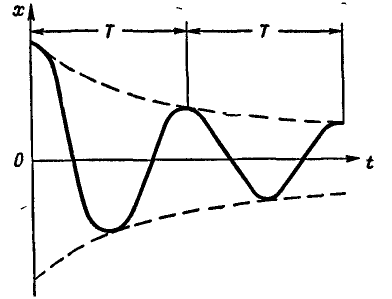
Рис. 281.
Из выражения для периода затухающих колебаний:
видно, что он сохраняет постоянную величину и не зависит от начальных условий. Сравнивая периоды свободных колебаний без учета и с учетом сопротивления, замечаем, что сопротивление увеличивает период свободных колебаний. Обозначим в уравнении (166) величину одного размаха через  , тогда, давая времени t значения
, тогда, давая времени t значения  , где
, где  —время одного размаха, мы получим величины последующих размахов:
—время одного размаха, мы получим величины последующих размахов:  Отсюда следует, что величины размахов уменьшаются в отношении
Отсюда следует, что величины размахов уменьшаются в отношении  . Величину
. Величину  , представляющую разность натуральных логарифмов двух последующих размахов, называют логарифмическим декрементом, а
, представляющую разность натуральных логарифмов двух последующих размахов, называют логарифмическим декрементом, а  — коэффициентом затухания.
— коэффициентом затухания.
б) Случай, когда  Здесь корни характеристического уравнения получаются равными
Здесь корни характеристического уравнения получаются равными  и общий интеграл уравнения (165) будет:
и общий интеграл уравнения (165) будет:

Это движение уже не будет колебательным.
в) Случай большого сопротивления, когда  , что то же, когда
, что то же, когда  .
.
В этом случае корни характеристического уравнения получаются:

и общий интеграл уравнения. (165) принимает вид:

Движение, определяемое этим уравнением, также не является колебательным и называется апериодическим.
Задача №30
Для определения вязкости жидкости проделывают следующий опыт: прикрепив к двум одинаковым пружинам жесткости с тонкую пластинку А (рис. 282, а), заставляют ее совершать горизонтальные колебания в той жидкости, вязкость которой хотят определить, и находят период колебания  .
.
Затем ту же пластинку А заставляют колебаться в воздухе, прикрепив ее к концу пружины той же жесткости с (рис. 282, б), и находят период колебания  . Силу трения, выраженную в граммах между пластинкой и жидкостью, можно принять равной
. Силу трения, выраженную в граммах между пластинкой и жидкостью, можно принять равной  , где
, где  — поверхность пластинки, находящейся в жидкости,
— поверхность пластинки, находящейся в жидкости,  — ее скорость,
— ее скорость,  — коэффициент вязкости. По найденным из опыта величинам
— коэффициент вязкости. По найденным из опыта величинам  определить коэффициент вязкости
определить коэффициент вязкости  зная, что вес пластинки равен
зная, что вес пластинки равен  .
.
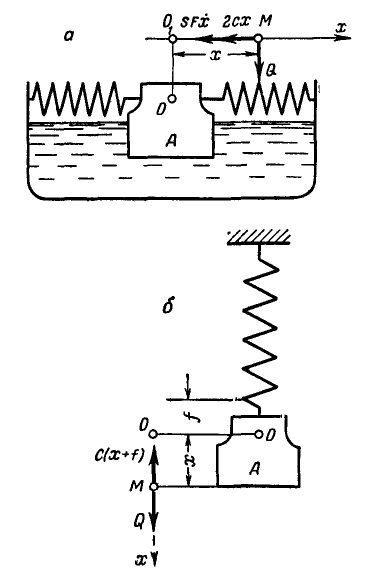
Рис. 282.
Решение. Составим дифференциальные уравнения движения пластинки для двух случаев, когда она колеблется в воздухе и когда колебания ее происходят в жидкости. В первом случае дифференциальное уравнение имеет вид:

или

Во втором случае, считая колебания пластинки прямолинейными, находим:

или

Сравнивая уравнения(а) и (б) с уравнениями (158) и (165),видим,что колебания пластинки в воздухе свободные, а в жидкости затухающие.
Отсюда периоды колебаний для колебания пластинки в воздухе и в жидкости определятся по формулам (160) и (167):
где

Коэффициент  определим из уравнений (в) и (г). Решаем сначала уравнение (в) относительно с:
определим из уравнений (в) и (г). Решаем сначала уравнение (в) относительно с:
Подставляя значение с в уравнение (г) и, решая его относительно находим окончательно:

Задача №31
Пластинка весом Q= 100 г, подвешенная на пружине, движется между полюсами магнита.
Вследствие токов Фуко движение тормозится силой, пропорциональной скорости. Сила сопротивления движению равна:
где 
 — скорость в см/сек;
— скорость в см/сек;
Ф — магнитный поток между полюсами.
В начальный момент скорость пластинки равна нулю, и пружина не растянута; удлинение ее на 1 см получается при статическом действии силы в 20 г. Определить движение пластинки в том случае, когда  максвеллов.
максвеллов.
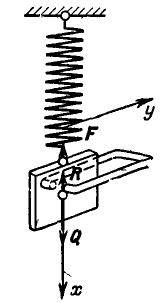
Рис. 283.
Решение. Во время колебания пластинки (рис. 283) на нее действуют следующие силы: вес пластинки Q, сила упругости пружины  и сила сопротивления движению
и сила сопротивления движению  .
.
Дифференциальное уравнение движения пластинки будет:

или

Обозначив:
получим:
Как было показано выше, общий интеграл такого дифференциального уравнения будет:

Скорость движения пластинки:

Для определения постоянных интегрирования  воспользуемся начальными условиями.
воспользуемся начальными условиями.
При t = 0

при t = 0
Подставляя найденные численные значения, получим окончательно:

4. Вынужденные колебания материальной точки при наличии сопротивления. Рассмотрим, наконец, влияние сопротивления на вынужденные колебания материальной точки.
В этом случае, как легко видеть, дифференциальное уравнение движения материальной точки принимает вид:

Решение этого уравнения представляется в виде суммы общего интеграла уравнения (168) без правой части:

который для случая малого сопротивления, когда  выражается уравнением (166) и частного решения; последнее мы будем искать в виде:
выражается уравнением (166) и частного решения; последнее мы будем искать в виде:

Из последнего равенства находим:
Подставляя из последних равенств значения  в уравнение (168) и сравнивая коэффициенты при cos pt и sin pt получим систему двух уравнений с двумя неизвестными В и D:
в уравнение (168) и сравнивая коэффициенты при cos pt и sin pt получим систему двух уравнений с двумя неизвестными В и D:
Решая совместно полученные уравнения, найдем, что D и В будут равны:
 и
и 
Подставляя значения D и В в равенство (а), будем иметь:

Введем обозначения:
тогда получим частное решение уравнения (а) в виде:
Следовательно, решение дифференциального уравнения (168) может быть представлено в виде:

Первое слагаемое правой части равенства (170) представляет затухающие колебания, второе слагаемое—гармонические колебания с частотой р, амплитудой А и начальной фазой  . Наличие второго слагаемого обусловлено действием возмущающей силы, а поэтому эти колебания называются вынужденными.
. Наличие второго слагаемого обусловлено действием возмущающей силы, а поэтому эти колебания называются вынужденными.
Амплитуду вынужденных колебаний можно представить иначе:
Если предположить, что  , т. е. возмущающая сила прикладывается статически, то
, т. е. возмущающая сила прикладывается статически, то  , и поэтому
, и поэтому  .
.
Но так как  то
то  .
.
В силу равенства (145) величина  представляет наибольшее перемещение точки, которое получилось бы при наибольшем значении возмущающей силы Н, если бы она была приложена статически.
представляет наибольшее перемещение точки, которое получилось бы при наибольшем значении возмущающей силы Н, если бы она была приложена статически.
Величина же

представляет коэффициент динамичности, который может оказать значительное влияние на увеличение амплитуды колебаний.
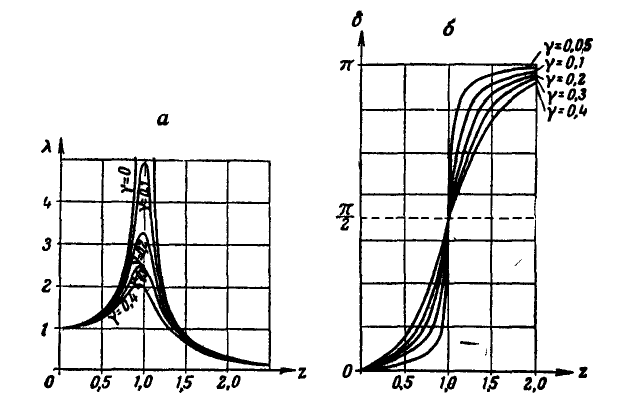
Рис. 284.
На рисунке 284, а изображены кривые, показывающие, как изменяется коэффициент динамичности  в зависимости от
в зависимости от  т. е. от отношения
т. е. от отношения  при различных значениях
при различных значениях  . Из этих кривых видно, что точки максимума коэффициента динамичности расположены несколько левее ординат, соответствующих резонансу, когда
. Из этих кривых видно, что точки максимума коэффициента динамичности расположены несколько левее ординат, соответствующих резонансу, когда  . При уменьшении коэффициента сопротивления
. При уменьшении коэффициента сопротивления  , уменьшается также
, уменьшается также  , а коэффициент динамичности возрастает. В этом случае приобретает максимальное значение при отношении
, а коэффициент динамичности возрастает. В этом случае приобретает максимальное значение при отношении  , близком к единице. Поэтому при расчетах в большинстве случаев принимают
, близком к единице. Поэтому при расчетах в большинстве случаев принимают  при отношении
при отношении  .
.
Если при  , то
, то  , а отсюда и
, а отсюда и  , т. е. амплитуда вынужденных колебаний неограниченно возрастает, что практически может привести к разрушению конструкции.
, т. е. амплитуда вынужденных колебаний неограниченно возрастает, что практически может привести к разрушению конструкции.
Из рисунка 284, а видно, что в области, близкой к состоянию резонанса, когда отношение  находится в пределах 0,75— 1,25, затухание оказывает существенное влияние на уменьшение коэффициента динамичности
находится в пределах 0,75— 1,25, затухание оказывает существенное влияние на уменьшение коэффициента динамичности  .
.
Из уравнений (168) и (170) следует, что вынужденные колебания отстают от возмущающей силы по фазе на величину  , определяемую вторым равенством (169). Во многих случая учет разницы фаз
, определяемую вторым равенством (169). Во многих случая учет разницы фаз  при исследовании вынужденных колебаний имеет большое практическое значение. Такой учет необходимо бывает производить, например, при динамометрировании сельскохозяйственных машин, когда приходится вычислять тяговые усилия, пользуясь динамограммой, полученной с помощью приборов, называемых динамографами.
при исследовании вынужденных колебаний имеет большое практическое значение. Такой учет необходимо бывает производить, например, при динамометрировании сельскохозяйственных машин, когда приходится вычислять тяговые усилия, пользуясь динамограммой, полученной с помощью приборов, называемых динамографами.
На рисунке 284, б показаны диаграммы, представляющие характер изменения  при различных значениях
при различных значениях  .
.
Из этих диаграмм видно, что при малых затуханиях, когда  , а следовательно, и
, а следовательно, и  малы, в области, близкой к резонансу, имеют место резкие изменения фазы вынужденных колебаний
малы, в области, близкой к резонансу, имеют место резкие изменения фазы вынужденных колебаний  . Так, при
. Так, при  разница фаз
разница фаз  мала, она становится равной
мала, она становится равной  , когда
, когда  , и приближается к
, и приближается к  в случае
в случае  .
.
При  , когда
, когда  , разница фаз Изменяется сразу с 0 на .
, разница фаз Изменяется сразу с 0 на .
Если  , т. е. когда частота вынужденных колебаний меньше частоты собственных колебаний
, т. е. когда частота вынужденных колебаний меньше частоты собственных колебаний  , то
, то  и вынужденные колебания находятся в одной фазе с возмущающей силой.
и вынужденные колебания находятся в одной фазе с возмущающей силой.
Если же  , т. е.
, т. е.  , то
, то  , и вынужденные колебания находятся в противоположной фазе с возмущающей силой. Так, например, если к нижнему концу пружины подвесить груз, а верхнему концу сообщить колебательное движение с помощью кривошипа или руки, то при
, и вынужденные колебания находятся в противоположной фазе с возмущающей силой. Так, например, если к нижнему концу пружины подвесить груз, а верхнему концу сообщить колебательное движение с помощью кривошипа или руки, то при  , т. е. когда
, т. е. когда  , колеблющийся груз достигает своего нижнего положения, когда возмущающая сила получит наибольшее значение в направлении вниз. Если же
, колеблющийся груз достигает своего нижнего положения, когда возмущающая сила получит наибольшее значение в направлении вниз. Если же  , т. е.
, т. е.  , то в момент, когда возмущающая сила достигнет своего максимального значения в направлении вниз, колеблющийся груз достигнет своего верхнего положения.
, то в момент, когда возмущающая сила достигнет своего максимального значения в направлении вниз, колеблющийся груз достигнет своего верхнего положения.
И, наконец, если  , т. е. когда частота вынужденных колебаний верхнего конца пружины совпадет с частотой собственных колебаний груза, то возмущающая сила и вынужденные колебания груза изменятся по фазе на величину
, т. е. когда частота вынужденных колебаний верхнего конца пружины совпадет с частотой собственных колебаний груза, то возмущающая сила и вынужденные колебания груза изменятся по фазе на величину  .
.
Относительное движение материальной точки
С вопросом относительного движения точки мы уже встречались в разделе кинематики. Изучим теперь динамику относительного движения материальной точки, находящейся под действием сил  .
.
Как известно, абсолютное ускорение точки равно геометрической сумме трех ускорений — относительного, переносного и поворотного:

Умножим обе части этого равенства на 

откуда

Обозначим

и назовем эти векторы соответственно центробежной, касательной и кориолисовой силами инерции, тогда получим:

Следовательно, относительное движение точки можно рассматривать как абсолютное, происходящее под действием приложенных сил и трех сил инерции: центробежной, касательной и кориолисовой.
В правую часть равенства (172) вошли центробежная, касательная и кориолисовая силы инерции. Эти силы являются фиктивными. Они прикладываются к материальной точке, совершающей относительное движение, и каждая из этих сил равна произведению массы точки на соответствующее ускорение и направлена в сторону, противоположную этому ускорению.
Задача №32
Точка привеса математического маятника длиной  (рис. 285) совершает горизонтальные гармонические колебания:
(рис. 285) совершает горизонтальные гармонические колебания:  . Определить малые колебания маятника, считая, что в момент
. Определить малые колебания маятника, считая, что в момент  он находится в покое.
он находится в покое.
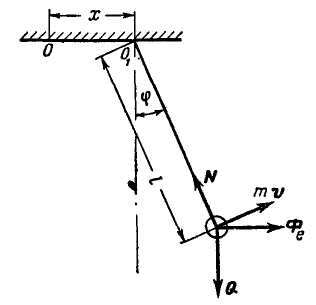
Рис. 285.
Решение. Переносное движение маятника поступательное, совершающееся по закону:  Согласно вышеизложенному, для определения малых колебаний маятника присоединим к действующим силам Q и N переносную силу инерции:
Согласно вышеизложенному, для определения малых колебаний маятника присоединим к действующим силам Q и N переносную силу инерции:

где

Применим теперь теорему моментов количества движения по отношению к оси у, проходящей через О перпендикулярно к плоскости чертежа:

где

Так как по условию колебания малые, то можно положить:  .
.
После подстановки найденных значений  и
и  в уравнение (а) найдем:
в уравнение (а) найдем:
Положим  ; тогда получим:
; тогда получим:

Общий интеграл уравнения (б) найдется как сумма общего интеграла без правой части:

и частного решения вида:  . Следовательно:
. Следовательно:

Постоянные интегрирования  и
и  определятся из начальных условий:
определятся из начальных условий:

Подставляя значения постоянных интегрирования в уравнение (в), получим окончательно:

Задача №33
Сигнальное устройство ручного сепаратора состоит из рукоятки OA длиной  , представляющей полую трубку, вдоль которой может перекатываться шарик В весом Q кГ (рис. 286). Найти закон движения шарика по отношению к трубке, если рукоятка вращается вокруг оси О с постоянной угловой скоростью
, представляющей полую трубку, вдоль которой может перекатываться шарик В весом Q кГ (рис. 286). Найти закон движения шарика по отношению к трубке, если рукоятка вращается вокруг оси О с постоянной угловой скоростью  , а в начальный момент шарик находился в точке А и его относительная скорость равнялась нулю.
, а в начальный момент шарик находился в точке А и его относительная скорость равнялась нулю.
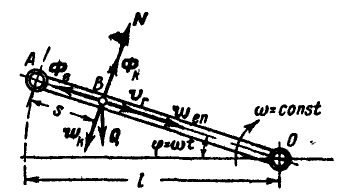
Рис. 286.
Трением шарика о стенки трубки пренебречь.
Решение. Относительное движение шарика вдоль трубки можно рассматривать как абсолютное, присоединив к действующим силам Q и N переносную и
кориолисовую силы инерции  . Величина
. Величина  .
.
Дифференциальное уравнение относительно движения шарика будет:

Полагая  и сокращая все уравнение на Q, получим:
и сокращая все уравнение на Q, получим:

Общее решение полученного дифференциального уравнения (а) складывается из двух решений: общего без правой части и частного с правой частью: 
Для нахождения решения дифференциального уравнения  без правой части составим характеристическое уравнение
без правой части составим характеристическое уравнение  и найдем его корни
и найдем его корни 
Так как корни характеристического уравнения действительные, то общий интеграл будет:

Для получения частного решения с правой частью положим:
Подставляя эти значения в уравнение (а), найдем:
Поэтому частное решение с правой частью будет:
а общее решение:

Заменяя  получим:
получим:
Определим постоянные интегрирования  из начальных условий.
из начальных условий.
По условию при  и
и  . Подставляя эти значения в выражения
. Подставляя эти значения в выражения  , получим следующую систему двух уравнений:
, получим следующую систему двух уравнений:

из которых находим:

Поэтому:

Динамика
Динамика — основной раздел теоретической механики. В динамике изучают механическое движение материальных объектов в связи с силами, приложенными к ним. Простейшим объектом является материальная точка — геометрическая точка, наделенная массой. Для решения текстовых задач , требуется определенный навык прочтения условия, умение выделить существенное, заметить недосказанное и, главное, не приписать к условию того, чего там нет. Например, если в задаче речь идет об автомобиле, который при некоторых условиях разгоняется за одно время, а при других условиях — за другое, то естественно предположить, что двигатель в обоих случаях один и тот же, и все параметры движения, кроме тех о которых явно сказано, одинаковые. Общий принцип здесь — не вносить в условие дополнительных сложностей и использовать все имеющиеся в тексте данные. Кроме того, для успешного решения этих задач рекомендуем повторить методы интегрирования) и методы решения дифференциальных уравнений.
Постоянные силы
Постановка Задачи. Материальная точка движется по прямой или по окружности под действием постоянных по величине сил. Определить закон движения точки или отдельные параметры движения.
План решения:
1. Выбираем систему координат. Для прямолинейного движения ось х направляем вдоль линии движения точки. Уравнения движения под действием сил, главный вектор которых обозначим как  имеют вид
имеют вид

При движении по окружности используем уравнения движения в естественных осях:

Нормаль n направлена к центру окружности,  — орт касательной, направленный в сторону увеличения дуговой координаты
— орт касательной, направленный в сторону увеличения дуговой координаты  Ось
Ось — перпендикулярна плоскости окружности.
— перпендикулярна плоскости окружности.
Прикладываем к точке все действующие на нее силы.
2. Составляем дифференциальные уравнения движения в проекциях на оси. В проекции на одну из осей уравнение движения вырождается в уравнение равновесия. Если в условии задачи есть трение, то из этого уравнения можно найти силу трения или выразить ее через другие силы.
3. Интегрируем дифференциальное уравнение. Константы интегрирования определяем из начальных условий.
4. Из полученного закона движения определяем необходимые величины.
11.1.Постоянные силы
Задача №34
С аэростата сбросили балласт, падение аэростата замедлилось, и через время  он поднялся на ту высоту, с которой сбросили балласт. Сила сопротивления воздуха R = const, подъемная сила аэростата — Т, масса аэростата без балласта — m. Сколько времени после сброса балласта аэростат опускался?
он поднялся на ту высоту, с которой сбросили балласт. Сила сопротивления воздуха R = const, подъемная сила аэростата — Т, масса аэростата без балласта — m. Сколько времени после сброса балласта аэростат опускался?
Решение
1. Ось у. направим вверх, поместив ее начало в нижней точке траектории аэростата. При падении на аэростат действуют силы тяжести  сила сопротивления воздуха R и подъемная сила Т (рис. 121). Аэростат принимаем за материальную точку.
сила сопротивления воздуха R и подъемная сила Т (рис. 121). Аэростат принимаем за материальную точку.
2.Составляем дифференциальное уравнение движения:

3.Дважды интегрируем уравнение движения. Для постоянных сил интеграл берется просто:
Начальные условия: t = 0, у = H,  Отсюда находим константы интегрирования
Отсюда находим константы интегрирования  Получаем уравнения
Получаем уравнения

Аналогично составляем уравнение при подъеме аэростата.
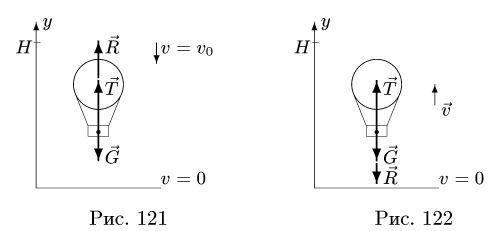
Сила сопротивления при этом меняет свое направление (рис. 122). Оставляя ось у прежней, время отсчитываем от нуля с момента подъема:

Интегрируя уравнение

получаем

Начальные условия:  Находим константы интегрирования:
Находим константы интегрирования: 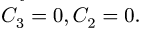 Из (4) следует
Из (4) следует

4. Находим искомое время падения. Обозначаем его за  а время подъема — за
а время подъема — за  По условию
По условию  Подставляем в (1,2) условия:
Подставляем в (1,2) условия:  Получаем систему трех
Получаем систему трех
уравнений с неизвестными 
Исключая неизвестную высоту Н и неизвестную начальную скорость  получаем
получаем

Переменные силы
Постановка Задачи. Материальная т,очка движется по прямой или по окружности под действием переменных сил. Определить закон движения точки или отдельные параметры движения.
План решения:
1. Выбираем систему координат. Для прямолинейного движения ось х направляем вдоль линии движения точки. При движении по окружности используем полярную систему координат с началом в центре окружности.
Прикладываем к точке все действующие на нее силы.
2. Составляем дифференциальные уравнения движения в проекциях на оси.
3. Интегрируем дифференциальное уравнение.
В зависимости от вида сил, действующих на точку, различают следующие случаи.
A. Сила зависит только от времени F = F(t). Решение задачи сводится к интегрированию функции F(t).
Б. Сила зависит только от координаты точки F = F(x). Вводится замена переменной  после чего получается уравнение с разделяющимися переменными.
после чего получается уравнение с разделяющимися переменными.
B. Сила зависит только от скорости точки  Если в начальных условиях или в вопросе присутствуют время и скорость, то следует использовать замену
Если в начальных условиях или в вопросе присутствуют время и скорость, то следует использовать замену  Если в начальных условиях или в вопросе присутствуют координата и скорость, то вводят замену переменной
Если в начальных условиях или в вопросе присутствуют координата и скорость, то вводят замену переменной 
Г. Сила зависит только от скорости точки и от координаты  Если в начальных условиях или в вопросе присутствуют скорость и координата, то вводят замену переменной
Если в начальных условиях или в вопросе присутствуют скорость и координата, то вводят замену переменной  Дифференциальное уравнение допускает разделение переменных:
Дифференциальное уравнение допускает разделение переменных:  .
.
Константы интегрирования определяем из начальных условий.
4. Из полученного закона движения определяем необходимые величины.
Задача №35
Грузовик массой m имеет максимальную скорость  и разгоняется с места до
и разгоняется с места до  за время
за время  Сила сопротивления пропорциональна скорости. Чему равна средняя сила тяги двигателя грузовика?
Сила сопротивления пропорциональна скорости. Чему равна средняя сила тяги двигателя грузовика?
Решение
1. Ось х системы координат принимаем горизонтальной, начало координат помещаем в начальное положение грузовика. Изображаем грузовик в некоторый промежуточный момент движения. На него действует сила тяжести  сила сопротивления
сила сопротивления  пропорциональная скорости
пропорциональная скорости  с неизвестным пока коэффициентом
с неизвестным пока коэффициентом  неизвестная сила тяги F и реакция опоры N (рис. 123).
неизвестная сила тяги F и реакция опоры N (рис. 123).
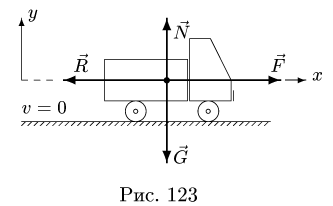
2. Составляем дифференциальное уравнение движения в проекции на ось х:
3. Дважды интегрируем уравнение движения. Так как правая часть уравнения является функцией скорости, а в вопросе задачи содержится время, вводим замену  и интегрируем уравнение с разделяющимися переменными
и интегрируем уравнение с разделяющимися переменными 
Начальные условия:  Так как в этой задаче не идет речь о расстояниях, то интегрировать второй раз и использовать условие на координату х не требуется. Из условия на скорость находим константу интегрирования
Так как в этой задаче не идет речь о расстояниях, то интегрировать второй раз и использовать условие на координату х не требуется. Из условия на скорость находим константу интегрирования  Зависимость скорости от времени движения принимает вид
Зависимость скорости от времени движения принимает вид

4. Находим искомую силу тяги F грузовика, считая сс постоянной. Для этого используем все имеющиеся в задаче данные. Известна максимальная скорость  Необходимым условием экстремума функции
Необходимым условием экстремума функции  является равенство
является равенство  или
или  Отсюда:
Отсюда:  Подставляем это соотношение в (1), откуда, при
Подставляем это соотношение в (1), откуда, при  получаем среднюю силу тяги грузовика
получаем среднюю силу тяги грузовика 
Теорема о движении центра масс
постановка задачи. Механизм, состоящий из п связанных между собой тел, установлен на призме, находящейся на горизонтальной плоскости. Трение между призмой и плоскостью отсутствует. Одно из тел получает перемещение относительно призмы. Куда и на какое расстояние переместится призма?
План решения:
Для решения задачи используем теорему о движении центра масс. Выбираем систему координат. Одну из осей, например, ось х направляем перпендикулярно линии действия внешних сил. В проекции на ось х уравнение движения центра масс принимает вид

где  — координата центра масс системы,
— координата центра масс системы, масса всей системы. Дважды интегрируя (1) при условии, что в начальный момент скорость центра масс была равна нулю, получаем
масса всей системы. Дважды интегрируя (1) при условии, что в начальный момент скорость центра масс была равна нулю, получаем

Координата центра масс системы вычисляется по формуле

Записывая (2) с учетом (3) один раз для начального положения системы (в покое), а другой раз после смещения одного из тел, получаем формулу, связывающую абсолютные смещения тел системы:

1. Абсолютное смещение каждого тела представляем как сумму относительного смещения, зависящего от величины заданного относительного смещения одного из тел, и неизвестного переносного смещения  , равного абсолютному смещению того тела, относительно которого задавалось смещение.
, равного абсолютному смещению того тела, относительно которого задавалось смещение.
2. Подставляя абсолютные смещения в (4), получаем уравнение для смещения  Решение уравнения дает ответ.
Решение уравнения дает ответ.
Задача №36
Механизм, состоящий из груза А массой 50 кг, блока В массой 80 кг (больший радиус R = 30 см, меньший г = 10 см) и цилиндра С массой 120 кг радиусом  , установлен на призме D массой 210 кг, находящейся на горизонтальной плоскости. Трение между призмой и плоскостью отсутствует. Груз А получает перемещение S = 1.2 м относительно призмы вдоль ее поверхности влево;
, установлен на призме D массой 210 кг, находящейся на горизонтальной плоскости. Трение между призмой и плоскостью отсутствует. Груз А получает перемещение S = 1.2 м относительно призмы вдоль ее поверхности влево;  (рис. 124). Куда и на какое расстояние переместится призма?
(рис. 124). Куда и на какое расстояние переместится призма?
Решение
Задаем систему координат. Проекции на горизонтальную ось всех внешних сил (сил тяжести  , реакции опоры N), действующих на систему, равны нулю (рис. 125), а трения между призмой D и опорой по условию нет. Применим к системе следствие из теоремы о движении центра масс в форме (4).
, реакции опоры N), действующих на систему, равны нулю (рис. 125), а трения между призмой D и опорой по условию нет. Применим к системе следствие из теоремы о движении центра масс в форме (4).
1. Абсолютное смещение тел А, В и С представляем как сумму относительного смещения, зависящего от величины S относительного смещения груза А, и неизвестного переносного смещения  , равного
, равного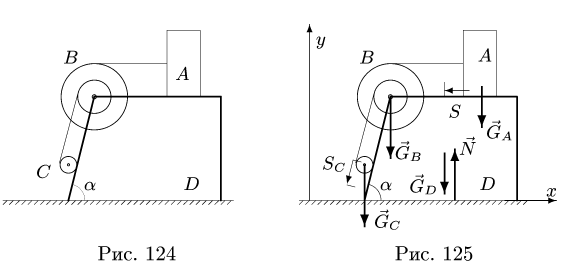
абсолютному смещению призмы, относительно которой задавалось смещение 5. Обозначаем абсолютные смещения координат центров масс тел системы  . Направление оси х определяет знаки смещений: налево с минусом, направо с плюсом. Предполагаем, что призма сместится направо. Перемещение центра цилиндра
. Направление оси х определяет знаки смещений: налево с минусом, направо с плюсом. Предполагаем, что призма сместится направо. Перемещение центра цилиндра
С относительно призмы и перемещение груза А связаны так же. как связаны их скорости.
Цилиндр С совершает плоское движение. Абсолютное смещение его центра в проекции на ось х равно  — смещение центра цилиндра вдоль наклонной поверхности призмы. Выразим
— смещение центра цилиндра вдоль наклонной поверхности призмы. Выразим  через S. Для этого свяжем скорости груза А и центра масс цилиндра С. Мгновенный центр скоростей цилиндра находится в точке касания призмы, поэтому скорость его центра масс относительно призмы вдвое меньше скорости нити, накручиваемой на обод. Скорость груза А выражаем через угловую скорость блока (рис. 132. с. 249):
через S. Для этого свяжем скорости груза А и центра масс цилиндра С. Мгновенный центр скоростей цилиндра находится в точке касания призмы, поэтому скорость его центра масс относительно призмы вдвое меньше скорости нити, накручиваемой на обод. Скорость груза А выражаем через угловую скорость блока (рис. 132. с. 249):

Исключая отсюда  имеем связь скоростей:
имеем связь скоростей:  Интегрируя это соотношение при нулевых начальных значениях, получаем искомую зависимость:
Интегрируя это соотношение при нулевых начальных значениях, получаем искомую зависимость:  . Находим выражение абсолютных смещений всех тел через
. Находим выражение абсолютных смещений всех тел через 

2. Подставляя абсолютные смещения в (4), получаем уравнение  или
или
 Решаем это уравнение относительно
Решаем это уравнение относительно 

Призма D переместится вправо на 14.39 см.
Кинетическая энергия механической системы
Постановка задачи. Выразить кинетическую энергию механической системы с одной степенью свободы через угловую скорость одного из тел системы или линейную скорость какой-либо ее точки.
План решения:
1. Составляем кинематические графы системы. Угловые скорости тел системы и линейные скорости их центров масс выражаем через заданную скорость.
2. Вычисляем кинетические энергии отдельных тел системы. Для тела, совершающего поступательное движение, кинетическая энергия

где  — масса тела, v — скорость любой его точки. Напомним, что при поступательном движении скорости всех точек тела равны, а угловая скорость равна нулю. Кинетическая энергия тела, совершающего вращательное движение с угловой скоростью
— масса тела, v — скорость любой его точки. Напомним, что при поступательном движении скорости всех точек тела равны, а угловая скорость равна нулю. Кинетическая энергия тела, совершающего вращательное движение с угловой скоростью 

J — момент инерции тела относительно оси вращения. Напомним, что у однородного цилиндра радиуса R момент инерции относительно оси, проходящей через центр масс, , однородного стержня длиной а, относительно середины
, однородного стержня длиной а, относительно середины , а относительно конца
, а относительно конца 
Моменты инерции тела относительно параллельных осей связаны соотношением (( — момент инерции относительно оси, проходящей через центр масс, h — расстояние между осями (см. также с. 273). Если известен радиус инерции
(( — момент инерции относительно оси, проходящей через центр масс, h — расстояние между осями (см. также с. 273). Если известен радиус инерции  тела массы
тела массы  , то его момент инерции
, то его момент инерции 
Кинетическая энергия тела, совершающего плоское движение,

где  — скорость центра масс тела,
— скорость центра масс тела,  — момент инерции тела относительно оси, проходящей через его центр масс. В частности, кинетическая энергия однородного цилиндра, катящегося без проскальзывания по неподвижной плоскости, вычисляется по формуле
— момент инерции тела относительно оси, проходящей через его центр масс. В частности, кинетическая энергия однородного цилиндра, катящегося без проскальзывания по неподвижной плоскости, вычисляется по формуле

3. Кинетическую энергию системы вычисляем как сумму кинетических энергий отдельных тел:
Задача №37
Выразить кинетическую энергию механической системы с одной степенью свободы (рис. 126) через угловую скорость  Система состоит из двух однородных цилиндров 1 и 2, радиусом R. соединенных двухзвенником ABC. Невесомый стержень АВ жестко
Система состоит из двух однородных цилиндров 1 и 2, радиусом R. соединенных двухзвенником ABC. Невесомый стержень АВ жестко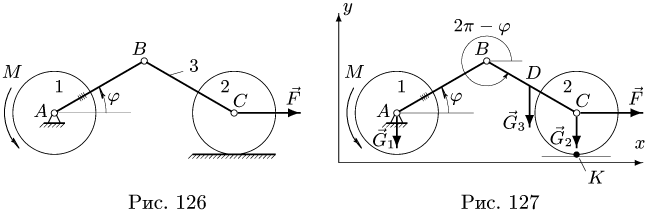
соединен с цилиндром 1. Массы цилиндров 1 и 2 равны  масса однородного стержня ВС —
масса однородного стержня ВС —  Качение цилиндра происходит без проскальзывания и сопротивления. На цилиндр 1 действует момент М, к оси С приложена горизонтальная сила
Качение цилиндра происходит без проскальзывания и сопротивления. На цилиндр 1 действует момент М, к оси С приложена горизонтальная сила 
 Условие задачи содержит избыточные данные — М, F. Они потребуются в дальнейшем для составления нелинейного уравнения движения этой системы.
Условие задачи содержит избыточные данные — М, F. Они потребуются в дальнейшем для составления нелинейного уравнения движения этой системы.
Решение
1. Составляем кинематические графы системы:

Записываем соответствующие им кинематические уравнения в проекциях на оси х и у (рис. 127):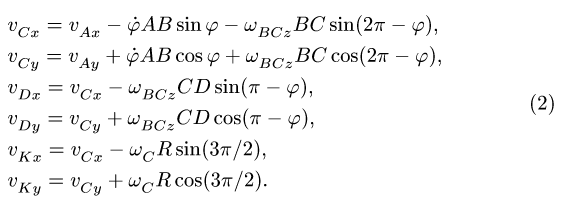
Точка К является МЦС цилиндра 2. С учетом кинематических связей  из системы (2) получаем выражения скоростей точек С, D и угловой скорости
из системы (2) получаем выражения скоростей точек С, D и угловой скорости 

2. Вычисляем кинетическую энергию тел системы. Цилиндр 1 масса которого  , а момент инерции относительно оси вращения, проходящей через центр масс,
, а момент инерции относительно оси вращения, проходящей через центр масс, имеет кинетическую энергию
имеет кинетическую энергию
Кинетическая энергия однородного цилиндра 2, катящегося без проскальзывания по неподвижной поверхности (с. 242),

Кинетическая энергия плоского движения стержня ВС, центр масс которого находится в точке D,

3. Кинетическую энергию системы вычисляем как сумму кинетических энергий отдельных тел:

Задача №38
Однородный диск 1 массой  , радиусом
, радиусом  шарнирно соединен в точке А с вертикально движущимся штоком 2 массой
шарнирно соединен в точке А с вертикально движущимся штоком 2 массой 
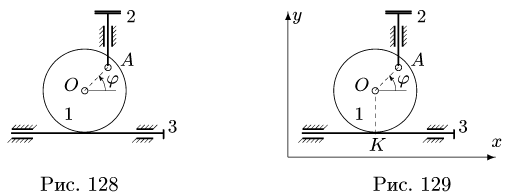
Диск катится по горизонтальному штоку 3 массой  без проскальзывания;
без проскальзывания;  Выразить кинетическую энергию механической системы (рис. 128) через угловую скорость
Выразить кинетическую энергию механической системы (рис. 128) через угловую скорость 
Решение
1. Составляем кинематические графы системы: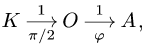
 Записываем соответствующие им кинематические уравнения в проекциях на оси х и у (рис. 129)
Записываем соответствующие им кинематические уравнения в проекциях на оси х и у (рис. 129)

По условию задачи  Используя эти соотношения (кинематические связи) получаем из (3)
Используя эти соотношения (кинематические связи) получаем из (3)

2. Вычисляем кинетическую энергию тел системы. Цилиндр 1, масса которого  , а момент инерции относительно оси вращения
, а момент инерции относительно оси вращения  имеет кинетическую энергию
имеет кинетическую энергию

Кинетическая энергия штока 
кинетическая энергия штока 
3. Кинетическую энергию системы вычисляем как сумму кинетических энергий отдельных тел:

Теорема об изменении кинетической энергии
Постановка задачи. Механическая система, находящаяся в покое, под действием внешних сил приходит в движение. За некоторое время одно из тел системы перемещается на заданное расстояние. Найти скорости, приобретенные телами системы.
План решения:
1. Выражаем кинетическую энергию системы через скорость  тола, перемещение
тола, перемещение  которого задано.
которого задано.
2. Вычисляем сумму работ сил, приложенных к системе, на заданном перемещении. Перемещения точек приложения сил и углы поворота тел, к которым приложены моменты, выражаем через  .
.
3. Из теоремы об изменении кинетической энергии,
где  — работа внешних и внутренних сил, определяем скорость
— работа внешних и внутренних сил, определяем скорость 
Задача №39
Механизм, состоящий из груза А, блока В и цилиндра С радиусом  установлен на неподвижной призме (рис. 130). Под действием сил тяжести из состояния покоя механизм пришел в движение. Даны массы
установлен на неподвижной призме (рис. 130). Под действием сил тяжести из состояния покоя механизм пришел в движение. Даны массы  радиусы
радиусы  радиус инерции блока
радиус инерции блока  = 15 см, коэффициент трения качения цилиндра о наклонную плоскость
= 15 см, коэффициент трения качения цилиндра о наклонную плоскость  = 2 мм, коэффициент трения скольжения груза о горизонтальную поверхность
= 2 мм, коэффициент трения скольжения груза о горизонтальную поверхность  = 0.1. Трения на оси блока В нет. Нити, соединяющие блок с грузом и цилиндром, параллельны плоскостям, по которым перемещаются эти тела. Какую скорость развил груз А, переместившись на расстояние
= 0.1. Трения на оси блока В нет. Нити, соединяющие блок с грузом и цилиндром, параллельны плоскостям, по которым перемещаются эти тела. Какую скорость развил груз А, переместившись на расстояние  = 1.2 м?
= 1.2 м?
Решение
Применяем теорему об изменении кинетической энергии системы (1). Для рассматриваемой системы, состоящей из твердых тел, соединенных нерастяжимыми нитями, работа внутренних сил равна нулю:
 В начальном положении все элементы механизма находились в покое, скорости всех тел были равны нулю, поэтому
В начальном положении все элементы механизма находились в покое, скорости всех тел были равны нулю, поэтому  = 0. Кинетическая энергия
= 0. Кинетическая энергия  , которую получила система после того, как груз переместился вдоль горизонтальной поверхности на расстояние
, которую получила система после того, как груз переместился вдоль горизонтальной поверхности на расстояние  зависит от искомой скорости
зависит от искомой скорости 
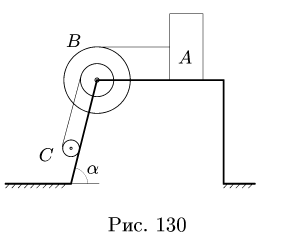
1. Кинетическую энергию системы, состоящую из трех слагаемых
выражаем через скорость  . Груз А движется поступательно, следовательно, его кинетическая энергия равна
. Груз А движется поступательно, следовательно, его кинетическая энергия равна  Тело В (блок) вращается относительно неподвижной оси:
Тело В (блок) вращается относительно неподвижной оси: Момент инерции блока относительно оси вращения вычисляем через заданный радиус инерции
Момент инерции блока относительно оси вращения вычисляем через заданный радиус инерции  Угловую скорость
Угловую скорость  необходимо выразить через искомую скорость
необходимо выразить через искомую скорость  Линейная скорость внешнего обода блока совпадает со скоростью груза
Линейная скорость внешнего обода блока совпадает со скоростью груза  , так как обод связан нерастяжимой нитью с грузом. Для угловой скорости блока записываем формулу
, так как обод связан нерастяжимой нитью с грузом. Для угловой скорости блока записываем формулу  . Выражаем Тв через скорость
. Выражаем Тв через скорость  :
:
Тело С (цилиндр) совершает плоское движение, поэтому
 — скорость центра масс цилиндра,
— скорость центра масс цилиндра,  — момент инерции цилиндра относительно центральной оси:
— момент инерции цилиндра относительно центральной оси:

Выражаем  через v. Точки внутреннего обода блока имеют скорость
через v. Точки внутреннего обода блока имеют скорость  или, выражая
или, выражая  через скорость груза,
через скорость груза,  (рис.131).
(рис.131).
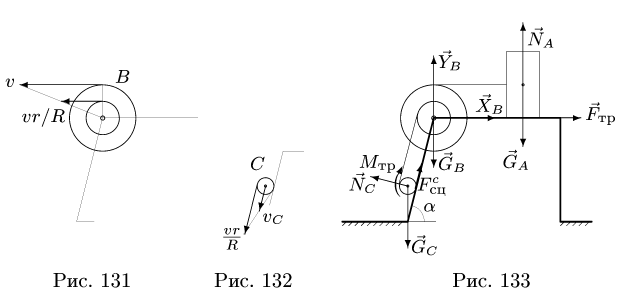
Цилиндр катится без проскальзывания, поэтому точка его соприкосновения с призмой является мгновенным центром скоростей тела (рис. 132), отсюда
В результате находим кинетическую энергию цилиндра С:

Кинетическую энергию системы трех тел представляем в виде 
где  — приведенная масса системы.
— приведенная масса системы.
2. Находим сумму работ внешних сил. Изображаем действующие на систему силы (рис. 133). Реакции опор  работы не совершают, так как они перпендикулярны перемещениям точек их приложения. Реакции оси
работы не совершают, так как они перпендикулярны перемещениям точек их приложения. Реакции оси приложены к неподвижным точкам, поэтому их работа также равна нулю. Аналогично, работа силы сцепления, приложенной к цилиндру С в точке касания, равна нулю. Находим сумму работ остальных сил:
приложены к неподвижным точкам, поэтому их работа также равна нулю. Аналогично, работа силы сцепления, приложенной к цилиндру С в точке касания, равна нулю. Находим сумму работ остальных сил:

где  — соответственно, смещение центра тяжести и угол поворота цилиндра С. Находим силу трения скольжения груза А и момент трения качения цилиндра С. Имеем
— соответственно, смещение центра тяжести и угол поворота цилиндра С. Находим силу трения скольжения груза А и момент трения качения цилиндра С. Имеем где
где  соответствующие нормальные реакции. Проекция всех сил, действующих на тело А, на нормаль к поверхности равна нулю. Отсюда,
соответствующие нормальные реакции. Проекция всех сил, действующих на тело А, на нормаль к поверхности равна нулю. Отсюда,  Аналогично, из равенства нулю суммы проекций на нормаль к боковой поверхности призмы всех сил, действующих на цилиндр, получаем
Аналогично, из равенства нулю суммы проекций на нормаль к боковой поверхности призмы всех сил, действующих на цилиндр, получаем  В результате
В результате

Так как то интегрируя (2) и (3) при нулевых начальных условиях, получаем
то интегрируя (2) и (3) при нулевых начальных условиях, получаем  Суммарную работу выражаем через
Суммарную работу выражаем через 

3. Кинетическую энергию (4) приравниваем сумме работ (5):

Отсюда получаем: v = 2.10 м/с.
Теорема о моменте количества движения системы
Постановка задачи. Горизонтальная платформа, на которой расположено N материальных точек, свободно вращается вокруг вертикальной оси. Как изменится угловая скорость платформы, если в некоторый момент времени точки начнут перемещаться по платформе вокруг оси вращения с заданными скоростями ? Трением пренебречь.
План решения:
По условию задачи моменты  всех внешних сил относительно оси вращения равен нулю (силы тяжести параллельны вертикальной оси, а реакции подшипников пересекают ось). Поэтому из теоремы об изменении момента количества движения системы, записанной в проекции на ось вращения z,
всех внешних сил относительно оси вращения равен нулю (силы тяжести параллельны вертикальной оси, а реакции подшипников пересекают ось). Поэтому из теоремы об изменении момента количества движения системы, записанной в проекции на ось вращения z,
следует закон сохранения момента количества движения системы

где  — проекции момента количества движения системы на ось z до и после относительного движения точек.
— проекции момента количества движения системы на ось z до и после относительного движения точек.
1. Вычисляем момент количества движения системы, для случая неподвижных относительно платформы точек:
где  , — момент инерции платформы относительно оси г, совпадающей с осью вращения,
, — момент инерции платформы относительно оси г, совпадающей с осью вращения,  — проекция начальной угловой скорости на ось
— проекция начальной угловой скорости на ось  — массы точек и радиусы окружностей, на которых они расположены.
— массы точек и радиусы окружностей, на которых они расположены.
2. Вычисляем момент количества движения системы, для случая, когда точки начали двигаться относительно платформы со скоростями 

где  — угловая скорость, которую получила платформа.
— угловая скорость, которую получила платформа.
3. Из уравнения (1) находим угловую скорость
Задача №40
Круглая горизонтальная платформа вращается без трения вокруг вертикальной оси, проходящей через ее центр масс с постоянной угловой скоростью  при этом на платформе стоят четыре человека: два — на краю платформы, а два на расстояниях от оси вращения, равных половине радиуса платформы (рис. 134).
при этом на платформе стоят четыре человека: два — на краю платформы, а два на расстояниях от оси вращения, равных половине радиуса платформы (рис. 134).
Как изменится угловая скорость платформы, если люди, стоящие на краю, будут двигаться по окружности в сторону вращения с относительной скоростью  а люди, стоящие на расстоянии половины радиуса от оси вращения, будут двигаться по окружности в противоположную сторону с относительной скоростью
а люди, стоящие на расстоянии половины радиуса от оси вращения, будут двигаться по окружности в противоположную сторону с относительной скоростью  Людей считать материальными точками одинаковой массы, а платформу — однородным диском.
Людей считать материальными точками одинаковой массы, а платформу — однородным диском.
Решение
На систему, состоящую из платформы и четырех человек, действуют внешние силы. Ось  направим по оси вращения. Моменты сил тяжести людей
направим по оси вращения. Моменты сил тяжести людей  платформы
платформы  и реакций подшипника (реакция X перпендикулярна плоскости чертежа и на рис. 135 не обозначена) относительно оси 2 равны нулю (рис. 135). Используем уравнение сохранения момента количества движения (1).
и реакций подшипника (реакция X перпендикулярна плоскости чертежа и на рис. 135 не обозначена) относительно оси 2 равны нулю (рис. 135). Используем уравнение сохранения момента количества движения (1).
1. Вычисляем момент количества движения системы, когда люди стоят неподвижно на платформе:

где  — момент инерции платформы,
— момент инерции платформы,  — масса каждого человека, R, — радиус платформы.
— масса каждого человека, R, — радиус платформы.
2. Вычисляем момент количества движения системы после того, как люди начали двигаться относительно платформы. У двух человек на внешнем ободе относительные скорости v и переносные скорости  суммируются,
суммируются,  и момент количества движения вычисляется в виде произведения величины количества движения
и момент количества движения вычисляется в виде произведения величины количества движения  на плечо R. У людей на внутреннем ободе переносная скорость меньше в два раза,
на плечо R. У людей на внутреннем ободе переносная скорость меньше в два раза, направлена в сторону вращения диска. Относительная же скорость
направлена в сторону вращения диска. Относительная же скорость  направлена в противоположную сторону, поэтому она берется с минусом. В итоге,
направлена в противоположную сторону, поэтому она берется с минусом. В итоге,

3. Из равенства следует, что
следует, что  т.е. угловая скорость вращения платформы не изменилась
т.е. угловая скорость вращения платформы не изменилась
Динамический расчет механизма с неизвестным параметром
Постановка задачи. Механическая система с неизвестным параметром под действием внешних сил приходит в движение из состояния покоя. За некоторое время одно из тел системы перемещается на заданное расстояние и приобретает, известную скорость. Найти неизвестный параметр системы и рассчитать движение системы в измененных условиях.
План решения:
Постановка задачи по сути представляет собой простой вариант практически важной проблемы идентификации параметров механизма по наблюдаемым характеристикам его движения. Для решения задачи применим теорему об изменении кинетической энергии.
1. Выражаем кинетическую энергию каждого тела системы через известную скорость  — приведенная масса
— приведенная масса  -го тела. Вычисляем суммарную приведенную массу:
-го тела. Вычисляем суммарную приведенную массу: 
2. Записываем теорему об изменении кинетической энергии:
Для неизменяемых систем (твердые тела, нерастяжимые нити) внутренние силы работу не совершают: В начальном состоянии система находилась в покое
В начальном состоянии система находилась в покое  = 0. Вычисляем работы внешних сил и записываем (1) в форме
= 0. Вычисляем работы внешних сил и записываем (1) в форме

Пусть неизвестная характеристика системы содержится в выражении для работы .
3. Решая уравнение (2), определяем неизвестный параметр.
4. Рассчитываем систему в новых условиях. В соответствии с ними вычисляем измененное значение работы  Искомую скорость определяем из равенства
Искомую скорость определяем из равенства
Задача №41
Механическая система состоит из трех тел, соединенных нитью. Блок А внутренним ободом катится без проскальзывания по наклонной плоскости, шкив Б (однородный цилиндр) вращается вокруг неподвижной оси. Груз D закреплен пружиной жесткости с (рис. 136).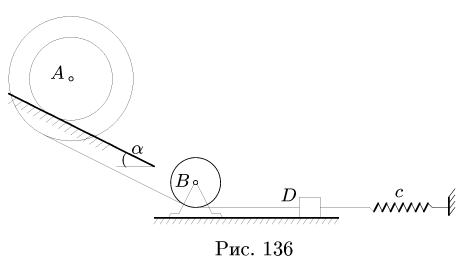
В начальном положении механизм находится в состоянии покоя, а пружина не напряжена. Переместившись вниз вдоль наклонной плоскости на расстояние  = 3 м, блок А приобретает скорость 2.5 м/с.
= 3 м, блок А приобретает скорость 2.5 м/с.
 Аналогично решается задача, когда неизвестная характеристика, например масса, содержится в кинетической энергии.
Аналогично решается задача, когда неизвестная характеристика, например масса, содержится в кинетической энергии.
Определить коэффициент трения качения блока А о наклонную плоскость. Учесть момент трения на оси цилиндра  и трение скольжения груза D о горизонтальную плоскость с коэффициентом
и трение скольжения груза D о горизонтальную плоскость с коэффициентом  Даны радиусы
Даны радиусы 
 радиус инерции блока
радиус инерции блока  Известны массы тел
Известны массы тел  угол
угол  и жесткость пружины
и жесткость пружины 
Чему будет равна скорость блока А на перемещении  , если коэффициент трения качения увеличить в 3 раза?
, если коэффициент трения качения увеличить в 3 раза?
Решение
1. Выражаем кинетическую энергию каждого тела системы через известную скорость  центра блока А. Блок А совершает плоское движение. Кинетическая энергия блока А
центра блока А. Блок А совершает плоское движение. Кинетическая энергия блока А
Здесь  — момент инерции блока относительно центра
— момент инерции блока относительно центра 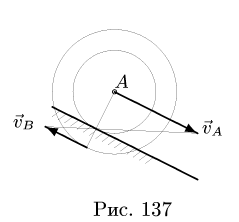
масс,  — радиус инерции блока. Выражаем угловую скорость блока
— радиус инерции блока. Выражаем угловую скорость блока  через скорость центра
через скорость центра . Блок катится без проскальзывания, следовательно, его мгновенный центр скоростей находится в точке касания внутреннего (меньшего) радиуса с плоскостью (рис. 137). Таким образом:
. Блок катится без проскальзывания, следовательно, его мгновенный центр скоростей находится в точке касания внутреннего (меньшего) радиуса с плоскостью (рис. 137). Таким образом:
Кинетическая энергия блока А имеет вид
Приведенная масса (коэффициент при 

Цилиндр В совершает вращательное движение вокруг своей оси,  Угловую скорость цилиндра В выражаем через скорость точки обода:
Угловую скорость цилиндра В выражаем через скорость точки обода: Скорость обода
Скорость обода  цилиндра В совпадает со скоростью внешнего обода блока А, так как они связаны нерастяжимой нитью. Расстояние от внешнего обода А до МЦС блока равно
цилиндра В совпадает со скоростью внешнего обода блока А, так как они связаны нерастяжимой нитью. Расстояние от внешнего обода А до МЦС блока равно  (рис. 137). Отсюда получаем выражение для скорости обода:
(рис. 137). Отсюда получаем выражение для скорости обода:

и угловой скорости цилиндра:

Получаем выражение для кинетической .энергии:

где приведенная масса  = 5 кг.
= 5 кг.
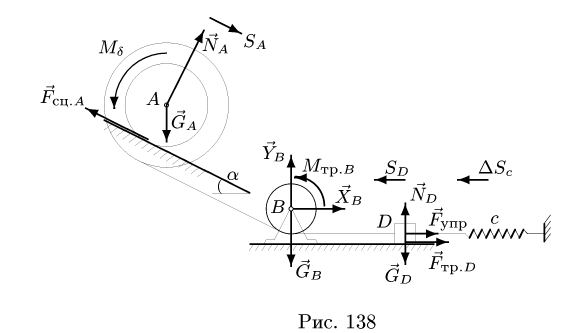
Груз D движется поступательно Скорость поступательного движения груза совпадает с линейной скоростью точек обода цилиндра
Скорость поступательного движения груза совпадает с линейной скоростью точек обода цилиндра  . Кинетическая энергия груза D
. Кинетическая энергия груза D
имеет вид 
Приведенная масса  = 4 кг.
= 4 кг.
Приведенная масса механизма:
2. Записываем теорему об изменении кинетической энергии

Вычисляем работу внешних сил (рис. 138). Реакции опор  перпендикулярны смещениям точек их приложения и их работы равны нулю. Так как блок катится без проскальзывания, то сила сцепления
перпендикулярны смещениям точек их приложения и их работы равны нулю. Так как блок катится без проскальзывания, то сила сцепления  приложена к МЦС блока и ее работа также равна нулю. Аналогично не совершают работу реакции
приложена к МЦС блока и ее работа также равна нулю. Аналогично не совершают работу реакции  , приложенные к неподвижной точке. Работа силы тяжести блока А, катящегося вниз
, приложенные к неподвижной точке. Работа силы тяжести блока А, катящегося вниз

Работа момента сил трения на оси В
Угол поворота  цилиндра В вокруг оси (в радианах) выражаем через
цилиндра В вокруг оси (в радианах) выражаем через  , интегрируя (4) при нулевых начальных условиях. Получаем
, интегрируя (4) при нулевых начальных условиях. Получаем  откуда
откуда  Работа силы трения скольжения
Работа силы трения скольжения  груза D на перемещении
груза D на перемещении

где перемещение  получаем, интегрируя (3) при нулевых начальных условиях. Работа силы упругости пружины
получаем, интегрируя (3) при нулевых начальных условиях. Работа силы упругости пружины
где  — удлинение пружины, равное перемещению груза D,
— удлинение пружины, равное перемещению груза D,  Вычисляем:
Вычисляем: 
3. Определяем коэффициент трения качения 6 блока А. Согласно
(5), 
где  — работа момента сил трения качения
— работа момента сил трения качения  на угле поворота
на угле поворота  блока А. При
блока А. При  = 2.5 м/с находим
= 2.5 м/с находим

Момент силы трения качения,  зависит от свойств соприкасающихся тел
зависит от свойств соприкасающихся тел и от реакции
и от реакции  которую можно найти из уравнения проекции на нормаль к наклонной плоскости
которую можно найти из уравнения проекции на нормаль к наклонной плоскости  Угол поворота
Угол поворота  В результате получаем
В результате получаем

откуда 
4. Определяем скорость центра блока А в измененных условиях, при  Вычисляем работу трения качения при
Вычисляем работу трения качения при 

Из теоремы об изменении кинетической энергии находим соответствующую скорость

Вычисляем ответ:
Замечание. Для решения задачи можно также использовать методы аналитической механики: общее уравнение динамики, уравнение Лагранжа 2-го рода и метод графов для определения скоростей.
Плоское движение системы
Постановка Задачи. Механическая система с одной степенью свободы состоит из тел, совершающих плоское движение. Составить и проинтегрировать дифференциальные уравнения движения системы.
План решения:
1. Разбиваем систему на отдельные тела. Связи заменяем их реакциями.
2. Для каждого тела выбираем систему координат, в которой записываем дифференциальные уравнения движения тела.
3. Записываем кинематические соотношения между скоростями и угловыми скоростями отдельных тел. Дифференцируя эти соотношения, находим связь соответствующих ускорений.
4. Преобразуем и при необходимости интегрируем систему дифференциальных уравнений движения тел и кинематические соотношения.
Задача №42
К барабану ворота радиуса  и массы
и массы  приложен постоянный вращающий момент М (рис. 139). К концу троса, намотанного на барабан, прикреплена ось С колеса массой
приложен постоянный вращающий момент М (рис. 139). К концу троса, намотанного на барабан, прикреплена ось С колеса массой  Колесо катится без скольжения вверх по наклонной плоскости, расположенной под углом
Колесо катится без скольжения вверх по наклонной плоскости, расположенной под углом  к горизонту. Какую угловую скорость приобретет барабан, сделав из состояния покоя
к горизонту. Какую угловую скорость приобретет барабан, сделав из состояния покоя  оборотов? Барабан и колесо считать однородными круглыми цилиндрами. Массой троса и трением пренебречь.
оборотов? Барабан и колесо считать однородными круглыми цилиндрами. Массой троса и трением пренебречь.
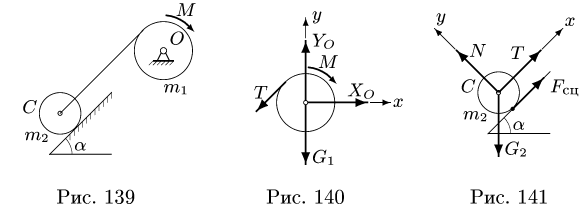
Решение
1. Разбиваем систему на два отдельных тела (рис. 140, 141). Связи заменяем их реакциями. Действие троса заменяем силой его натяжения Т, которую прикладываем к барабану и колесу во взаимно противоположных направлениях. Действие оси, на которой вращается барабан ворота, заменяем реакциями  К катящемуся без проскальзывания колесу С прикладываем силу сцепления
К катящемуся без проскальзывания колесу С прикладываем силу сцепления  и нормальную реакцию опоры N. Силу сцепления колеса с наклонной плоскостью
и нормальную реакцию опоры N. Силу сцепления колеса с наклонной плоскостью  направляем условно вверх (истинное направление будет известно в результате решения задами). Прикладываем внешние силы: веса
направляем условно вверх (истинное направление будет известно в результате решения задами). Прикладываем внешние силы: веса 
2. Записываем уравнения вращательного движения барабана массой  в выбранной системе координат
в выбранной системе координат
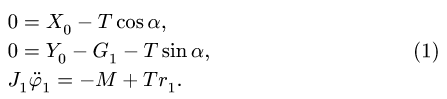
Центр масс барабана неподвижен, поэтому первые два уравнения движения имеют форму уравнений статики.
Рассматриваем движение колеса массой  (рис. 141). Система уравнений движения колеса имеет вид
(рис. 141). Система уравнений движения колеса имеет вид
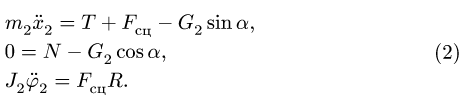
Во втором уравнении мы положили  .
.
3. Кинематические связи системы

Знак минус возникает из-за того, что положительные направления углов поворота (против часовой стрелки) колеса и барабана соответствуют отрицательной проекции скорости оси колеса. Дифференцируем (3) и получаем соотношения для ускорений

4. Система восьми уравнений (1), (2), (4) содержит восемь неизвестных  и разбивается на две. Для первых пяти неизвестных можно выделить систему пяти уравнений.
и разбивается на две. Для первых пяти неизвестных можно выделить систему пяти уравнений.
Гл.12.Динамика системы
Учитывая, что моменты инерции однородных цилиндров имеют вид  получаем
получаем
Исключая неизвестные  находим
находим

Правая часть (5) не зависит от времени. Обозначим ее за —А. Получим  Интегрируем (5) при условии, что в начале процесса (t= 0) барабан находился в покое
Интегрируем (5) при условии, что в начале процесса (t= 0) барабан находился в покое  и угол поворота отсчитывается от нуля
и угол поворота отсчитывается от нуля  Получаем уравнения
Получаем уравнения 
 которые записываем для некоторого момента
которые записываем для некоторого момента  когда барабан сделает по часовой стрелке n оборотов и повернется на отрицательный угол
когда барабан сделает по часовой стрелке n оборотов и повернется на отрицательный угол  Угловая скорость барабана при этом достигнет величины
Угловая скорость барабана при этом достигнет величины  которую надо определить в задаче:
которую надо определить в задаче:

Исключая неизвестное время  получаем ответ:
получаем ответ:

Знак минус показывает, что вращение барабана направлено по часовой стрелке. Анализ подкоренного выражения дает ограничение на существование решения: 
Динамические реакции в подшипниках ротора
Постановка Задачи. На оси, вращающейся в двух неподвижных подшипниках под действием постоянного внешнего момента, закреплен цилиндр и жесткий невесомый стержень с точечной массой на конце. Ось цилиндра составляет малый угол с осью вращения. Найти динамические составляющие реакций подшипников.
План решения:
Динамические составляющие реакций подшипников 
 на подвижные оси, связанные с вращающимся ротором, удовлетворяют уравнениям [16]
на подвижные оси, связанные с вращающимся ротором, удовлетворяют уравнениям [16]
где  — масса ротора,
— масса ротора, — координаты его центра масс,
— координаты его центра масс,  — центробежные моменты инерции ротора. Ось
— центробежные моменты инерции ротора. Ось  направлена по оси вращения ротора;
направлена по оси вращения ротора;  — угловые скорость и ускорение ротора в проекции на
— угловые скорость и ускорение ротора в проекции на  — координаты подшипников А и В.
— координаты подшипников А и В.
1. Вводим систему координат. Начало координат помещаем в одном из подшипников, например, А. Ось  направляем по оси вращения, ось х направляем так, чтобы ось цилиндра лежала в плоскости
направляем по оси вращения, ось х направляем так, чтобы ось цилиндра лежала в плоскости  Определяем массу m системы двух тел и координаты центра масс системы:
Определяем массу m системы двух тел и координаты центра масс системы:

где  — координаты центров масс тел.
— координаты центров масс тел.
2. Вычисляем моменты инерции цилиндра, ось которого составляет малый угол с осью вращения
которого составляет малый угол с осью вращения  относительно осей координат:
относительно осей координат:
Малый угол  отсчитывается от оси цилиндра
отсчитывается от оси цилиндра  к положительному направлению оси
к положительному направлению оси  Угол берется положительный, если со стороны оси у поворот оси цилиндра к оси z виден против часовой стрелки, и отрицательный — если поворот виден по направлению часовой стрелки. Моменты инерции
Угол берется положительный, если со стороны оси у поворот оси цилиндра к оси z виден против часовой стрелки, и отрицательный — если поворот виден по направлению часовой стрелки. Моменты инерции вычислены по теореме Гюйгенса
вычислены по теореме Гюйгенса . Вторые слагаемые в (3) представляют собой соответствующие моменты инерции центра масс цилиндра относительно начала координат.
. Вторые слагаемые в (3) представляют собой соответствующие моменты инерции центра масс цилиндра относительно начала координат.
3. Вычисляем моменты инерции точечной массы (груза) относительно осей х, у, z

4. Находим суммарные моменты инерции системы
5. Вычисляем угловое ускорение ротора  и угловую скорость ротора в указанный момент t.Если
и угловую скорость ротора в указанный момент t.Если  то
то 
6. Искомые реакции находим из решения системы (1) при 
Задача №43
На оси, вращающейся в неподвижных подшипниках А и В под действием постоянного момента  закреплен ротор, состоящий из цилиндра массой
закреплен ротор, состоящий из цилиндра массой  и жесткого невесомого стержня длиной L = 21 см с точечной массой
и жесткого невесомого стержня длиной L = 21 см с точечной массой  на конце (рис. 142). Ось цилиндра составляет угол
на конце (рис. 142). Ось цилиндра составляет угол  рад с осью вращения
рад с осью вращения  Центр массы цилиндра лежит на оси
Центр массы цилиндра лежит на оси  Стержень перпендикулярен
Стержень перпендикулярен  Найти динамические составляющие реакций подшипников в момент времени t = 3 с. Ротор вращается из состояния покоя.
Найти динамические составляющие реакций подшипников в момент времени t = 3 с. Ротор вращается из состояния покоя.
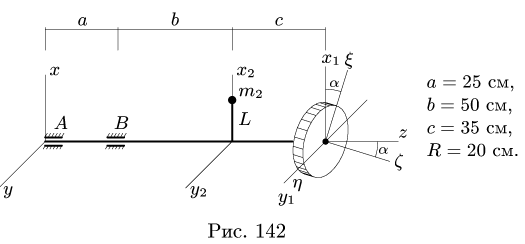
Введены системы координат  с осями, параллельными
с осями, параллельными  проходящими через центры масс тел 1 и 2. Ось
проходящими через центры масс тел 1 и 2. Ось  является осью цилиндра и вместе с осями
является осью цилиндра и вместе с осями  лежит в плоскости xz. Оси
лежит в плоскости xz. Оси  перпендикулярны
перпендикулярны 
Решение
1. Вводим систему координат. Начало координат помещаем в подшипнике А, ось z направляем по оси вращения. Ось цилиндра лежит в плоскости xz. Определяем массу системы  и координаты центра масс системы по формуле (2)
и координаты центра масс системы по формуле (2)

2.Вычисляем моменты инерции цилиндра относительно осей координат по формулам (3), где 

Угол берется положительный, так как со стороны оси у поворот оси цилиндра к оси  виден против часовой стрелки.
виден против часовой стрелки.
3.Вычисляем моменты инерции точечной массы (груза) относительно осей 

4. Находим суммарные моменты инерции системы 

5.Вычисляем угловое ускорение ротора  и угловую скорость ротора в момент t = 3 с. Так как
и угловую скорость ротора в момент t = 3 с. Так как  и
и 
6. Динамические реакции опор вычисляем, решая систему (1) при 
- Движение материальной точки
- Аналитическая статика
- Теорема о движении центра инерции
- Теорема количества движения
- Движение твердого тела, имеющего неподвижную точку
- Движение твердого тела
- Сложение движений точки
- Сложение движений твердого тела в теоретической механике – формулы и определения с примерами
По кинематике и динамике
ПОСТУПАТЕЛЬНОГО
И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЙ1
Разделы
механики
|
Кинематика |
Изучает |
|
Динамика |
Изучает |
|
Статика |
Изучает Если |
Физические
модели в механике
|
Материальная |
Тело, |
|
Система |
Произвольное |
|
Абсолютно |
Тело, |
|
Абсолютно |
Тело, |
|
Абсолютно |
Тело, |
Система отсчета. Кинематические уравнения движения
|
Тело отсчета |
Произвольно Положение |
|
Система |
Система |

Рис. 1
|
Система |
Совокупность |
Кинематические уравнения движения материальной точки

Траектория, длина пути, вектор перемещения
|
Траектория |
Линия, В Вид |
|
Вектор |
Вектор |
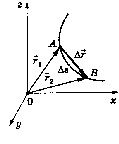
 ,
,Рис. 2
|
Длина |
Длина При |


КИНЕМАТИКА
ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ

Скорость
Векторная
величина, которая определяет как быстроту
движения, так и его направление в данный
момент времени
Рис. 3
Средняя
скорость

Векторная
величина, определяемая отношением
приращения радиуса-вектора точки

к промежутку времени
 ,
,
в течение которого это приращение
произошло.
Направление
вектора средней скорости совпадает с
направлением
Мгновенная
скорость

Векторная
величина, определяемая первой производной
радиуса вектора движущейся точки по
времени.
Вектор
мгновенной скорости направлен по
касательной к траектории в сторону
движения (Рис. 3)
Модуль
мгновенной скорости

Модуль
мгновенной скорости равен первой
производной пути по времени
Единица
скорости

Ускорение
и его составляющие
Ускорение
Характеристика
неравномерного движения, определяющая
быстроту изменения скорости по модулю
и направлению.
Среднее
ускорение

Векторная
величина, равная отношению изменения
скорости к интервалу времени, за которое
это изменение произошло
Мгновенное
ускорение

Векторная
величина, определяемая первой производной
скорости по времени
Составляющие
ускорения
|
Тангенциальная
|
Характеризует |


|
Рис. 4 Нормальная
|
Характеризует |
|
Полное |
|
|
Модуль |
|
|
Единица |
|




Классификация
движения
в
зависимости от тангенциальной и
нормальной составляющих ускорения
|
|
|
Движение |
|
0 |
0 |
Прямолинейное |
|
|
0 |
Прямолинейное |
|
|
0 |
Прямолинейное |
|
0 |
const |
Равномерное |
|
0 |
0 |
Равномерное |
|
const |
0 |
Криволинейное |
|
|
0 |
Криволинейное |


 =
= =
= =f(t)
=f(t) =f(t)
=f(t)
ПРИМЕРЫ
РАЗЛИЧНЫХ ВИДОВ ДВИЖЕНИЯ

ВЫЧИСЛЕНИЕ
ПРОЙДЕННОГО ПУТИ

КИНЕМАТИКА
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
|
Элементарный |
Элементарные |


 равен
равен

|
|
Угловая
|
Вектор Угловая |
|
Связь |
|
|
|
Связь |
Положение
|
|
|
Единица |
1 |
|
|
ДВИЖЕНИЕ Равномерное |
||
|
Движение, Угловая Характерной |
||
|
Период
|
Время, |
|
|
Частота
|
Число |
|
|
Ускорение |
||
|
|
Тангенциальная |



 .
.

 .
. совпадает
совпадает .
.
 =
=

 =const),
=const),





|
|
Нормальная Ускорение |
|
Угловое |
|
|
Равноускоренное |
Угловое Размерность Если
Так
здесь |
|
Направление |
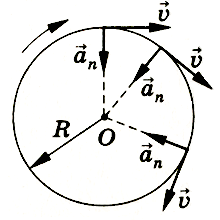



 =const,
=const, ,
, ,
,



|
При вращении При Вектор |
|
|
Связь |
|
|
|
|
|
|
|


 ,
,




ОСНОВЫ
ДИНАМИКИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Первый
закон Ньютона.
Формулировка
первого закона Ньютона.
Всякая
материальная точка (тело) сохраняет
состояние покоя или равномерного
прямолинейного движения до тех пор,
пока воздействие со стороны других тел
не заставит ее изменить это состояние.
(В этой формулировке Ньютон привел
закон, установленный еще Галилеем).
Эта
формулировка тем самым утверждает
существование
инерциальных систем отсчета .
Масса
и импульс тела. Сила.
|
Масса |
Физическая Можно Масса Единица
|
|
Импульс
|
Векторная Единица |
|
Сила, |
Векторная В |
|
ОСНОВНОЙ Общая |
|
|
|
Скорость Записанное |
|
или
|
Еще Ускорение, Единица |
|
Второй |
|
|
ТРЕТИЙ Формулировка |
|
|
Всякое Эти
|








 .
.
 –
–
ЗАКОН
СОХРАНЕНИЯ ИМПУЛЬСА
В
случае замкнутой системы, когда внешние
силы отсутствуют (или геометрическая
сумма внешних сил равна нулю) или общей
формулировки второго закона Ньютона
имеем

или
 .
.
Импульс
замкнутой системы сохраняется, то есть
не
изменяется с течением времени.
Этот
закон – фундаментальный закон природы
(Он универсален).
МЕХАНИКА
ТВЕРДОГО ТЕЛА
|
Момент
Единицы |
Физическая
Суммирование
Момент
Момент
В Здесь
|
|
МОМЕНТЫ |




 ,
,

 –
– ,
, .
.

|
МОМЕНТ УРАВНЕНИЕ |
|
Момент силы
|
Физическая
|
|
Модуль
Единицы |
|
|
Уравнение |
|
|
|
Момент Выведем
но
тогда Вывод |


 ,
, .
.










 (см.
(см.
Момент
|
Физическая
|
|
|
Модуль |
|
|
|
Момент |
||
|
Единицы |
||
|
Еще
уравнения
|
||
|
Закон
В
тогда |



 псевдовектор,
псевдовектор,








 ,
,
Аналогия
в описании
поступательного
и вращательного движений
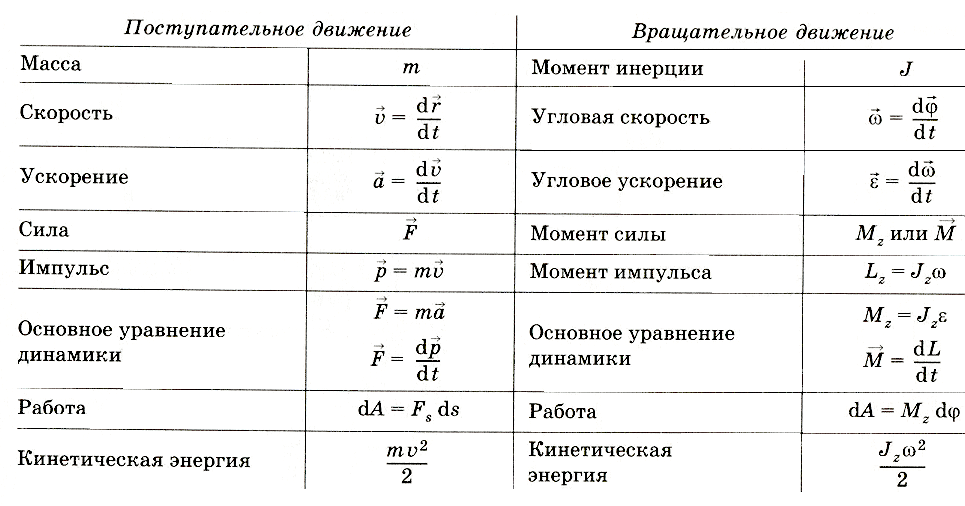
РАБОТА.
МОЩНОСТЬ. ЭНЕРГИЯ


КИНЕТИЧЕСКАЯ
И ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ
Кинетическая
энергия тела массой m,
движущегося со скоростью v

Определяется
работой, которую надо совершить, чтобы
сообщить телу данную скорость.
Кинетическая
энергия всегда положительна; является
функцией состояния системы.
Работа сил
при перемещении из точки 1 в точку 2.
 .
.
Потенциальная
энергия и консервативные силы
Потенциальная
энергия.
Механическая
энергия системы тел, определяемая их
взаимным расположением и характером
сил взаимодействия между ними.
Потенциальное
поле.
Поле, в
котором работа, совершаемая силами при
перемещении тела из одного положения
в другое, не зависит от того, по какой
траектории это перемещение произошло,
а зависит только от начального и конечного
положений.
Консервативные
силы
Сила, работа
которой при перемещении тела из одного
положения в другое не зависит от того,
по какой траектории это перемещение
произошло, а зависит только от начального
и конечного положений тела. Пример
– сила тяжести.
Если работа
консервативных сил совершается по
замкнутому пути, то она равна нулю.
Работа консервативных
сил при элементарном (бесконечно малом)
изменении конфигурации системы равна
приращению потенциальной энергии,
взятому со знаком «минус», так как работа
совершается за счет убыли потенциальной
энергии
 .
.
Связь между
консервативной силой и потенциальной
энергией.
 .
.
Конкретный вид
функции

зависит от характера силового поля.
Потенциальная
энергия тела массой

на высоте


– Это выражение
вытекает из того, что потенциальная
энергия равна работе силы тяжести при
падении тела с высоты

на поверхность Земли. Высота

отсчитывается от нулевого уровня, для
которого
 ,
,
 –
–
ускорение свободного падения.
Поскольку начало
отсчета выбирается произвольно, то
потенциальная энергия может иметь
отрицательное значение (кинетическая
энергия всегда положительна!).
Если принять за
нуль потенциальную энергию тела, лежащего
на поверхности Земли, то потенциальная
энергия тела, находящегося на дне шахты
(глубина
 ),
),

Потенциальная
энергия упруго деформированного тела
(пружины)

Это выражение
получается из того, что работа силы при
деформации пружины идет на увеличение
потенциальной энергии пружины.

– коэффициент
упругости (для пружины – жесткость).
Полная механическая
энергия системы равна сумме кинетической
и потенциальной энергий.

Закон сохранения
и превращения энергии.
Энергия никогда
не исчезает и не появляется вновь, она
лишь превращается из одного вида в
другой.
В этом заключается
физическая
сущность закона
сохранения и превращения энергии –
сущность неуничтожимости материи и ее
движения.
Этот закон –
фундаментальный
закон природы,
он справедлив как для систем макроскопических
тел, так и для систем микротел.
ВРАЩАТЕЛЬНОЕ
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Работа при
вращении тела
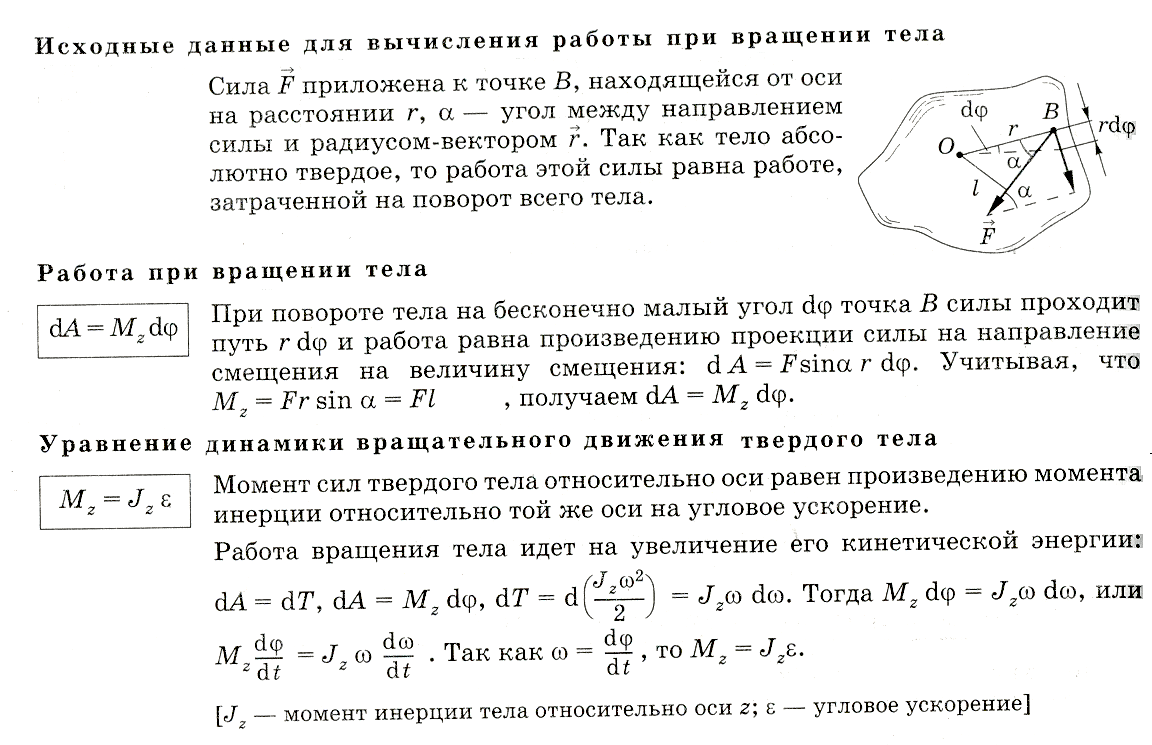
Кинетическая
энергия вращающегося тела
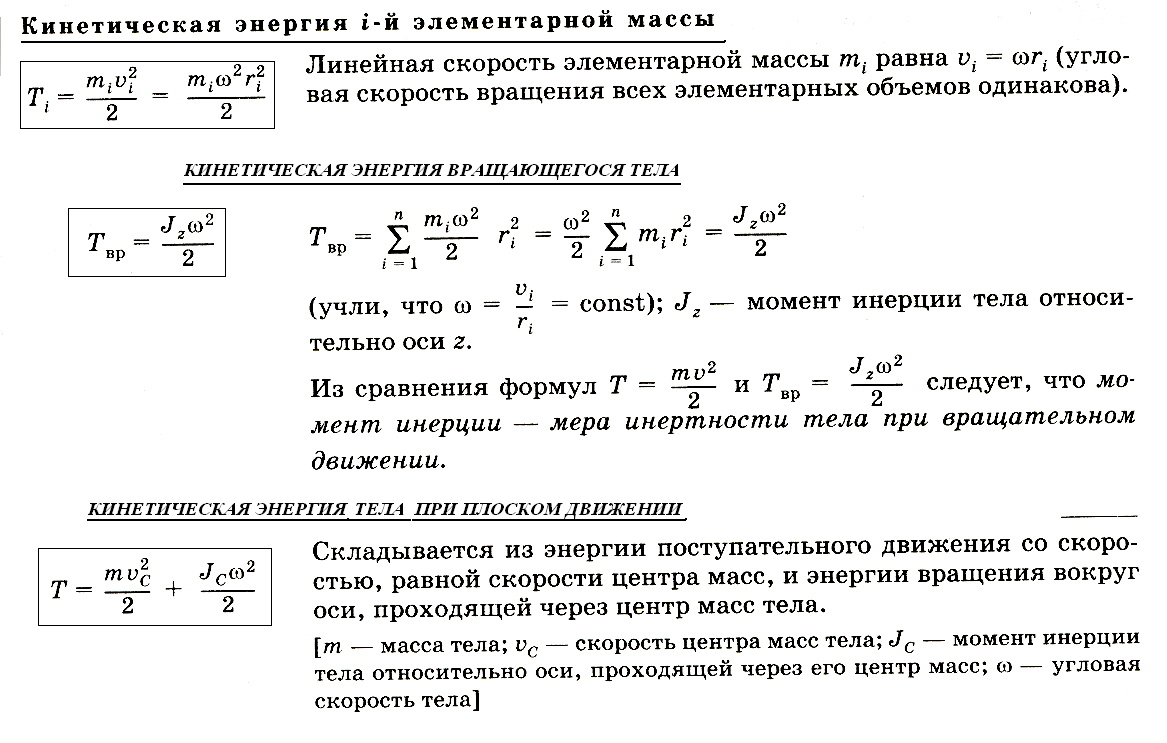
ВОПРОСЫ
К СЕМИНАРУ ПО МЕХАНИКЕ
-
Как рассчитать
путь S
при равномерном, равнопеременном
движении? -
Как рассчитать
мгновенную линейную скорость? Единицы
измерения мгновенной линейной скорости? -
Как рассчитать
мгновенное линейное ускорение? Единицы
измерения линейного ускорения? -
Как рассчитать
нормальное ускорение an
при движении тела по криволинейной
траектории? Что показывает нормальное
ускорение? -
Как рассчитать
тангенциальное ускорение? Что показывает
тангенциальное ускорение? -
Как рассчитать
полное ускорение? -
Как рассчитать
путь при равномерном, равнопеременном
вращении с угловой скоростью
? -
Записать формулы
связи между линейными и угловыми
величинами. -
Основной закон
динамики вращательного движения. Две
формулы. ( В
векторной форме) -
Закон сохранения
момента количества движения. Формулировка
и математическая запись. -
Как
рассчитать момент силы М?
(По определению). Формулу записать в
векторной и скалярной формах. Единицы
измерения момента силы. -
Как
рассчитать момент количества движения?
(По определению). Формулу записать в
векторной и скалярной формах. Единицы
измерения момента количества движения. -
Как рассчитать
момент инерции J
материальной точки массой m
относительно оси, находящейся от нее
на расстоянии r
? .Единицы измерения момента инерции -
Как
рассчитать кинетическую энергию тела,
движущегося поступательно? Единицы
измерения энергии -
Как рассчитать
потенциальную энергию, которой обладает
тело, поднятое над землей на высоту h? -
Как рассчитать
потенциальную энергию сжатой пружины,
коэффициент упругости которой k? -
Как рассчитать
работу А
по перемещению силой F
какого-либо груза на расстояние s
? Единицы
измерения работы? -
Как рассчитать
мощность? Единицы измерения мощности. -
Как рассчитать
кинетическую энергию вращающегося
тела? -
Что обозначено
каждой буквой в предложенной Вами
формуле для расчета кинетической
энергии вращающегося тела?
Соседние файлы в предмете Физика
- #
- #
- #
Как найти путь, пройденный маятником?

Амплитуда
колебаний материальной точки составляет 30 мм, а частота 100 Гц. Определите
путь, пройденный этой точкой за 1,5 с.
Решение.
Одно
полное колебание материальная точка совершает за время, равное периоду
колебаний T = u-1 , следовательно, за
время t она совершает N = t/T = tu колебаний.
При этом за одно колебание точка проходит путь l1 = 4A. Значит, за время t, т.е. за N колебаний, она пройдет путь L
= 4Atu = 4•30•10-3•1,5•100 м = 18 м.
Ответ:
L
= 18 м.
Источник: Подготовка к тестированию по физике. Шепелевич. В. Г.
I. Механика
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T – это время, за которое тело совершает один оборот.
Частота вращение – это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено – это есть период T. Путь, который преодолевает точка – это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Вращение Земли
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Как вывести формулу центростремительного ускорения
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение – изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Как найти перемещение окружности
Движение по окружности
Движение по окружности — простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
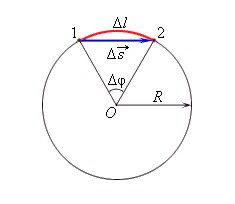
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории — предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости — радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → — v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
Взглянем на рисунок:
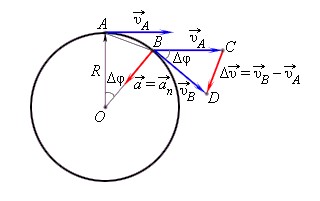
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → — v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → — радиус вектор точки на окружности с началом в ее центре.
Тангенциальное ускорение
В общем случае ускорение при движении по окружности состоит из двух компонентов — нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 — v 1 — изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
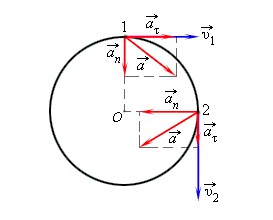
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
Движение по окружности: формулы и расчеты
Перемещение тел по окружности достаточно распространено в нашей жизни и в природе. Яркими примерами этого типа перемещения являются вращения ветровых мельниц, планет вокруг своих звезд и колес транспортных средств. В данной статье рассмотрим, какими формулами движение по окружности тел описывается.
Перемещение по окружности и по прямой линии в физике

В физике вопросами движения занимается кинематика. Она устанавливает связь между величинами, описывающими этот процесс. В динамике также уделяется внимание движению, однако она ориентирована на описание причин его возникновения. Другими словами, если для кинематики главными физическими величинами являются путь и скорость, то для динамики — это действующие на тела силы.
 Вам будет интересно: Интерес: определение, понятие, типы и функции
Вам будет интересно: Интерес: определение, понятие, типы и функции
В физике принято выделять два идеальных типа траекторий движения:
Математический аппарат для описания движения по обоим типам траекторий развит настолько хорошо, что понимание формул, например для прямолинейного движения, автоматически приводит к пониманию выражений для движения по окружности. Единственная принципиальная разница между формулами указанных типов перемещения заключается в том, что для движения по окружности удобно использовать угловые характеристики, а не линейные.
 Вам будет интересно: Педагогическая система Макаренко: принципы и компоненты
Вам будет интересно: Педагогическая система Макаренко: принципы и компоненты
Далее в статье будем рассматривать исключительно кинематические формулы движения по окружности тел, не вдаваясь в подробности динамики.
Угловые характеристики движения: угол поворота
Прежде чем записывать формулы движения по окружности в физике, следует ввести величины, которые будут фигурировать в этих формулах.
Начнем с угла поворота. Будем обозначать его греческой буквой θ (тета). Поскольку вращение предполагает движение точки вдоль одной и той же окружности, то значение угла поворота θ за определенный промежуток времени можно использовать для определения количества оборотов, которое сделала эта точка. Напомним, что вся окружность равна 2*pi радиан, или 360o. Тогда формула для числа оборотов n через угол θ примет вид:
 Вам будет интересно: Академик Рыбаков Б.А.: биография, археологическая деятельность, книги
Вам будет интересно: Академик Рыбаков Б.А.: биография, археологическая деятельность, книги
Здесь и далее во всех формулах угол выражается в радианах.
Пользуясь известным углом θ, также можно определить линейное расстояние, которое точка прошла вдоль окружности. Это расстояние будет равно:
Здесь r — радиус рассматриваемой окружности.
Угловая скорость и ускорение

Кинематические формулы движения по окружности точки предполагают также использование понятий угловой скорости и углового ускорения. Обозначим первую буквой ω (омега), а вторую буквой α (альфа).
Физический смысл угловой скорости ω прост: эта величина показывает, на какой угол в радианах поворачивается точка за каждую секунду времени. Данное определение имеет следующее математическое представление:
Эта формула скорости движения по окружности записана в дифференциальной форме. Полученная с ее помощью величина ω называется мгновенной скоростью. Ее удобно использовать, если движение не является равномерным, то есть происходит с переменной скоростью.
Угловое ускорение α — это величина, которая описывает быстроту изменения скорости ω, то есть:
Угловое ускорение измеряется в радианах в секунду квадратную (рад/с2). Так, 1 рад/с2 означает, что тело увеличивает за каждую секунду времени скорость на 1 рад/с.
Учитывая выражение для ω, записанное выше, равенство можно представить в такой форме:
В зависимости от особенностей движения по окружности величина α может быть постоянной, переменной или нулевой.
Равномерное движение
Когда на вращающееся тело не действует никакая внешняя сила, то угловая скорость будет оставаться постоянной сколь угодно длительное время. Такое движение получило название равномерного вращения. Оно описывается следующей формулой:
В этом выражении переменными являются всего две величины: t и θ. Скорость ω = const.
Следует отметить один важный момент: нулю равна лишь равнодействующая внешних сил на тело, внутренние же силы, действующие в системе, нулю не равны. Так, внутренняя сила заставляет вращающееся тело изменять свою прямолинейную траекторию на криволинейную (окружность). Эта сила приводит к появлению центростремительного ускорения. Последнее не изменяет ни скорость ω, ни линейную скорость v, оно лишь изменяет направление движения.
Равноускоренное движение по окружности
Формулы для этого типа перемещения можно получить непосредственно из приведенных математических выражений для величин ω и α. Равноускоренное движение предполагает, что за более-менее длительный промежуток времени модуль и направление ускорения α не изменяются. Благодаря этому можно проинтегрировать дифференциальное выражение для α и получить следующие две формулы:
Очевидно, что в первом случае движение будет равноускоренным, во втором — равнозамедленным. Величина ω0 здесь — это некоторая начальная скорость, которой вращающееся тело обладало до появления ускорения.
Для равноускоренного движения не существует конечной скорости, поскольку она может возрастать сколь угодно долго. Для равнозамедленного движения конечным состоянием будет прекращение вращения, то есть ω = 0.
Теперь запишем формулы для определения угла θ при движении с постоянным ускорением. Эти формулы получаются, если произвести двойное интегрирование по времени для выражения α через θ. Получаются следующие выражения:
То есть центральный угол θ, на который тело повернется за время t, будет равен сумме двух слагаемых. Первое слагаемое — это вклад в θ равномерного движения, второе — равноускоренного (равнозамедленного).
Связь между угловыми и линейными величинами
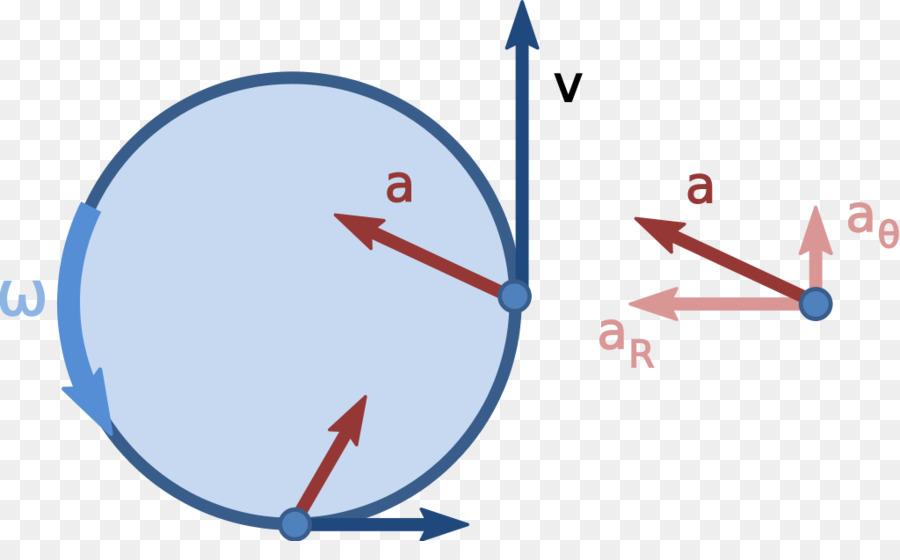
При рассмотрении понятия угла поворота θ уже была приведена формула, которая его связывает с линейным расстоянием L. Здесь же рассмотрим аналогичные выражения для скорости ω и ускорения α.
Линейная скорость v при равномерном движении определяется как расстояние L, пройденное за время t, то есть:
Подставляя сюда выражение для L через θ, получаем:
Мы получили связь между линейной и угловой скоростью. Важно отметить, что удобство использования угловой скорости связано с тем, что она не зависит от радиуса окружности. В свою очередь, линейная скорость v возрастает линейно с увеличением r.
Остается записать связь между линейным ускорением a и его угловым аналогом α. Чтобы это сделать, запишем выражение для скорости v при равноускоренном движении без начальной скорости v0. Получаем:
Подставляем сюда полученное выражение связи между v и ω:
Как и скорость, линейное ускорение, направленное по касательной к окружности, зависит от радиуса.
Ускорение центростремительное
Выше уже было сказано несколько слов об этой величине. Здесь приведем формулы, которые можно использовать для ее вычисления. Через скорость v выражение для центростремительного ускорения ac имеет вид:
Через угловую скорость его можно записать так:
Величина ac не имеет никакого отношения к тангенциальному ускорению a. Центростремительное ускорение обеспечивает поддержание вращающегося тела на одной окружности.
Задача на определение угловой скорости вращения планеты
Известно, что ближе всего к солнцу находится Меркурий. Полагая, что он вращается по окружности вокруг светила, мы можем определить его угловую скорость ω.
Для решения задачи следует обратиться к справочным данным. Из них известно, что планета делает полный оборот вокруг светила за 87 дней 23,23 часа земных. Это время называется периодом обращения. Учитывая, что движение происходит с постоянной угловой скоростью, запишем рабочую формулу:
Остается перевести время в секунды, подставить значение угла θ, соответствующее полному обороту (2*pi), и записать ответ: ω = 8,26*10-7 рад/c.
I. Механика
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T — это время, за которое тело совершает один оборот.
Частота вращение — это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено — это есть период T. Путь, который преодолевает точка — это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Вращение Земли
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Как вывести формулу центростремительного ускорения
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение — изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Кинематика. Равномерное движение по окружности.
Среди различных видов криволинейного движения особый интерес представляет равномерное движение тела по окружности. Это самый простой вид криволинейного движения. Вместе с тем любое сложное криволинейное движение тела на достаточно малом участке его траектории можно приближенно рассматривать как равномерное движение по окружности.
Такое движение совершают точки вращающихся колес, роторов турбин, искуственные спутники, вращающиеся по орбитам и т. д. При равномерном движении по окружности численное значение скорости остается постоянным. Однако направление скорости при таком движении непрерывно изменяется.
Скорость движения тела в любой точке криволинейной траектории направлена по касательной к траектории в этой точке. В этом можно убедиться, наблюдая за работой точила, имеющего форму диска: прижав к вращающемуся камню конец стального прута можно увидеть отрывающиеся от камня раскаленные частицы. Эти частицы летят с той скоростью, которой они обладали в момент отрыва от камня. Направление вылета искр всегда совпадает с касательной к окружности в той точке, где пруток касается камня. По касательной к окружности движутся также брызги от колес буксующего автомобиля.
Таким образом, мгновенная скорость тела в разных точках криволинейной траектории имеет различные направления, тогда как модуль скорости может быть или всюду одинаковым, или изменяться от точки к точке. Но даже если модуль скорости не изменяется, ее все равно нельзя считать постоянной. Ведь скорость – величина векторная, а для векторных величин модуль и направление одинаково важны. Поэтому криволинейное движение всегда ускоренное, даже если модуль скорости постоянен.
При криволинейном движении могут изменяться модуль скорости и ее направление. Криволинейное движение, при котором модуль скорости остается постоянным, называют равномерным криволинейным движением. Ускорение при таком движении связано только с изменением направления вектора скорости.
И модуль, и направление ускорения должны зависеть от формы кривлинейной траектории. Однако нет необходимости рассматривать каждую из ее бесчисленных форм. Представив каждый участок как отдельную окружность с некоторым радиусом, задача нахождения ускорения при криволинейном равномерном движении сведется к отысканию ускорения при равномерном движении тела по окружности.
Равномерное движение по окружности характеризуется периодом и частотой обращения.
Время, за которое тело делает один оборот, называют периодом обращения.
При равномерном движении по окружности период обращения определяется делением пройденного пути, т. е. длины окружности на скорость движения:
Величина, обратная периоду, называется частотой обращения, обозначается буквой ν. Число оборотов в единицу времени ν называют частотой обращения:
Из-за непрерывного изменения направления скорости, движущееся по окружности тело имеет ускорение, которое характеризует быстроту изменения ее направления, численное значение скорости в данном случае не меняется.
При равномерном движении тела по окружности ускорение в любой ее точке всегда направлено перпендикулярно скорости движения по радиусу окружности к ее центру и называется центростремительным ускорением.
Поскольку угол равен отношению длины дуги АВ к радиусу R, получим
Выражение для модуля вектора ускорения а имеет вид:
[spoiler title=”источники:”]
http://b4.cooksy.ru/articles/kak-nayti-peremeschenie-okruzhnosti
http://www.calc.ru/Kinematika-Ravnomernoye-Dvizheniye-Po-Okruzhnosti.html
[/spoiler]
