Продолжаем предыдущий урок на тему “Применение криволинейных интегралов 2 рода”.
Готовые ответы задач на работу силового поля помогут студентам выучить тему, и научат быстро находить нужные интегралы.
Пример 4.2 Найти работу силы F ( ) при перемещении точки вдоль кривой C:
) при перемещении точки вдоль кривой C:
x2/4+y2/9=1 от точки A(- 2;0) к точке B(0;3).
Решение: Запишем уравнение заданного эллипса в параметрическом виде: x=2*cos(t), y=3*sin(t).
Наведем графически траекторию материальной точки вдоль эллипса.
Тогда дифференциал переменных по параметру будет равен dx=-2*sin(t)dt, dy=3*cos(t)dt .
При этом пределы интегрирования ограничатся точками Pi и Pi/2.
Найдем работу силы F по кривой C через криволинейный интеграл ІІ рода : 
Пересмотрите внимательно формулы интегрирования синуса и косинуса, и понижения степени для таких функций.
Пример 4.4 Найти работу силы  по перемещению точки вдоль кривой C:
по перемещению точки вдоль кривой C:
y=4-2x^2 от точки  к точке
к точке 
Решение: Построим траекторию движения материальной точки вдоль параболы L: y=4-2x2.
Вычисляем дифференциал дуги y=4-2x2, dy=-4x*dx и из условия выписиваем пределы интегрирования 
Работа силы F находим с помощью криволинейного интеграла второго рода
Интегрирование занимает не мало времени и при превращениях можно допустить ошибку, поэтому будьте внимательные в этих местах.
Пример 4.11 Найти работу силы  при перемещении вдоль кривой C:
при перемещении вдоль кривой C:
y=ln(x) от точки A(1;0) к точке B(e;1).
Решение: Траектория материальной точки вдоль логарифма имеет вид 
Находим дифференциал логарифма y=ln (x), dy=dx/x.
Пределы интегрирования изменяются от единицы к экспоненте.
Работа силы F с помощью криволинейного интеграла ІІ рода примет значение:
Здесь для логарифма применили правило интегрирования частями (u*dv).
Пример 4.13 Найти работу силы F при перемещении вдоль кривой C:
x2+y2=9 от точки A (0;-3) к точке  , где F задана формулой
, где F задана формулой
Решение: Построим траекторию движения материальной точки вдоль круга радиусом 3.
Чтобы не выражать две функции (верхняя и нижняя кривая круга) запишем зависимость x(y) и вычислим дифференциал дуги
При этом ордината изменяется от – 3 до 3/2.
Применяя криволинейный интеграл ІІ рода находим роботу силы F при перемещении вдоль круга:
Бороться с корнями во время интегрирования непросто, о чем свидетельствует приведенные вычисления.
Намного проще вычислять интеграл при переходе к полярной системе координат.
Дальше наведем методику интегрирования:
ІІ – способ:
Параметризуэм заданный круг:
Учитывая, что во время движения от точки A(0;-3) к точке угол изменяется от 
Вычисляем искомый криволинейный интеграл ІІ рода : 
В плане вычислений второй метод более легкий, поэтому для круговых и эллиптических форм кривой при симметричном вхождении x, y в уравнение силы рекомендуем переходить к полярной системе координат.
Пример 4.15 Найти работу силы  при перемещении вдоль кривой C:
при перемещении вдоль кривой C:
4x2+y2=4 от точки A(0;2) к точке B (-1;0).
Решение: Траектория движения материальной точки по эллипсу приведена ниже

Записываем верхнюю дугу эллипса и ее производную.
Пределы интегрирования изменяются от 0 к -1
Работа силы F через криволинейный интеграл второга рода выражается зависимостью:
Пример 4.18 Найти работу силы  по перемещению материальной точки вдоль кривой C:
по перемещению материальной точки вдоль кривой C:
y=cos(x) от точки A(Pi/2;0) к точке B(-Pi/2;0).
Решение: Изобразим траекторию материальной точки вдоль косинуса
Построим дифференциал кривой y=cos(x), dy=-sin(x)*dx.
Он нужен для возведения криволинейного интегралу ІІ рода к определенному.
Находим работу силы F по перемещении вдоль контура интегрированием
Для понижения под интегралом степеней косинуса и синуса применили известные тригонометрические формулы.
Пример 4.21 Найти работу силы  при перемещении вдоль кривой C:
при перемещении вдоль кривой C:
y=x3 от точки A(0;0) к точке B(2;8).
Решение: Построим траекторию материальной точки вдоль кривой y=x3.
Вычисляем дифференциал дуги dy=3x2dx.
Пределы интегрирования приведены на рисунку и в условии.
Работа силы F находим с помощью криволинейного интегралу ІІ рода:
Превращаем все к показательной форме и интегрируем.
Пример 4.23 Найти работу силы  при перемещении вдоль кривой C: x2+2y2=2 от точки
при перемещении вдоль кривой C: x2+2y2=2 от точки  к точке
к точке 
Решение: За инструкцией строим траекторию материальной точки вдоль эллипса: x2+2y2=2.
Для простоты вычислений криволинейного интеграла ІІ рода параметризуэм эллипс:
Учитывая, что от точки  к точке
к точке  угол изменяется в пределах
угол изменяется в пределах  переходим к интегрированию
переходим к интегрированию
Понижаем степени и интегрируем.
Пример 4.24 Найти работу силы  при перемещении вдоль кривой C:
при перемещении вдоль кривой C:
y=1-|x| от точки A(-1;0) к точке B(2;- 1).
Решение: Наведем траекторию материальной точки вдоль модуль функции.
Как ни хотелось встретить задания с разбитием кривой на два интервала, однако одно Пример содержит такое условие. Разделим на две части: y=1+x, тогда пределы равны [-1;0] и дифференциал dy=dx;
На втором участке y=1-x имеем [0;2] и dy=-dx.
Вычисляем работу силы F, потраченную на перемещении точки вдоль модуль функции:
На этом ознакомление из такого сорта примерами завершено.
Больше готовых ответов из курса высшей математики ищите на страницах сайта.
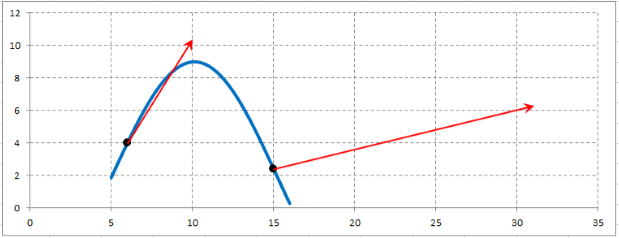
На материальную точку $Tleft(x,yright)$ действует переменная сила $overline{F}=left(3cdot x-2cdot yright)cdot overline{i}+4cdot ycdot overline{j}$. Под действием этой силы материальная точка перемещается на отрезке $left[6;15right]$ от точки $M$ до точки $N$ вдоль синусоидальной кривой $y=7cdot sin left(0,31cdot x-1,57right)+2$. Найти работу переменной силы $overline{F}$ на криволинейном пути от точки $M$ до точки $N$. Построить графическое изображение пути от точки $M$ до точки $N$, а также векторы переменной сили $overline{F}$ в этих точках.
Выполняем графическое изображение синусоидальной кривой $y=7cdot sin left(0,31cdot x-1,57right)+2$ на отрезке $left[6;15right]$.
Находим значения синусоиды в точках $x_{M} =6$ и $x_{N} =15$:
- $y_{M} =7cdot sin left(0,31cdot 6-1,57right)+2approx 4$;
- $y_{N} =7cdot sin left(0,31cdot 15-1,57right)+2approx 2,43$.
Выполняем графические изображения векторов переменной силы $overline{F}=left(3cdot x-2cdot yright)cdot overline{i}+4cdot ycdot overline{j}$, значения которого в точках $M$ и $N$ соответственно равны $overline{F}_{M} =left(3cdot 6-2cdot 4right)cdot overline{i}+4cdot 4cdot overline{j}=10cdot overline{i}+16cdot overline{j}$ и $bar{F}_{N} =left(3cdot 15-2cdot 2,43right)cdot overline{i}+4cdot 2,43cdot overline{j}=40,14cdot overline{i}+9,72cdot overline{j}$.
Работу данной силы на данном участке кривой $MN$ вычисляем по формуле $A=int limits _{a}^{b}Pleft(x,yleft(xright)right)cdot dx +int limits _{a}^{b}Qleft(x,yleft(xright)right)cdot y’left(xright)cdot dx $.
Здесь участок кривой $MN$ задан на отрезке $left[x_{M} ,; x_{N} right]$, поэтому формула для работы приобретает вид: $A=int limits _{x_{M} }^{x_{N} }Pleft(x,yleft(xright)right)cdot dx +int limits _{x_{M} }^{x_{N} }Qleft(x,yleft(xright)right)cdot y’left(xright)cdot dx $.
В этой формуле первый интеграл дает значение работы силы $F$ вдоль оси $Ox$, второй интеграл — вдоль оси $Oy$.
Находим работу силы вдоль оси $Ox$: $A_{x} =int limits _{6}^{15}Pleft(x,yleft(xright)right)cdot dx $.
Согласно условию задачи имеем:
[Pleft(x,yright)=3cdot x-2cdot y; y=7cdot sin left(0,31cdot x-1,57right)+2.]
Поэтому:
[Pleft(x,yleft(xright)right)=3cdot x-2cdot left(7cdot sin left(0,31cdot x-1,57right)+2right)=]
[=3cdot x-14cdot sin left(0,31cdot x-1,57right)-4.]
Далее получаем:
[A_{x} =int limits _{6}^{15}left(3cdot x-14cdot sin left(0,31cdot x-1,57right)-4right)cdot dx =]
[=int limits _{6}^{15}3cdot xcdot dx +int limits _{6}^{15}left(-14cdot sin left(0,31cdot x-1,57right)right)cdot dx +int limits _{6}^{15}left(-4right)cdot dx =]
[=3cdot int limits _{6}^{15}xcdot dx -14cdot int limits _{6}^{15}sin left(0,31cdot x-1,57right)cdot dx -4cdot int limits _{6}^{15}dx =]
[=3cdot left[frac{x^{2} }{2} right]_{6}^{15} -14cdot left[-frac{1}{0,31} cdot cos left(0,31cdot x-1,57right)right]_{6}^{15} -4cdot left[xright]_{6}^{15} =]
[=1,5cdot left(15^{2} -6^{2} right)+frac{14}{0,31} cdot left(cos left(0,31cdot 15-1,57right)-cos left(0,31cdot 6-1,57right)right)-]
[-4cdot left(15-6right)=135,15.]
Находим работу силы вдоль оси $Oy$: $A_{y} =int limits _{6}^{15}Qleft(x,yleft(xright)right)cdot y’cdot dx $.
Согласно условию задачи имеем:
[Qleft(x,yright)=4cdot y; y=7cdot sin left(0,31cdot x-1,57right)+2. ]
Поэтому:
[Qleft(x,yleft(xright)right)=4cdot left(7cdot sin left(0,31cdot x-1,57right)+2right)=28cdot sin left(0,31cdot x-1,57right)+8;]
[y’=7cdot 0,31cdot cos left(0,31cdot x-1,57right)=2,17cdot cos left(0,31cdot x-1,57right).]
Далее получаем:
[A_{y} =int limits _{6}^{15}left(28cdot sin left(0,31cdot x-1,57right)+8right)cdot 2,17cdot cos left(0,31cdot x-1,57right)cdot dx =]
[=int limits _{6}^{15}28cdot 2,17cdot sin left(0,31cdot x-1,57right)cdot cos left(0,31cdot x-1,57right)cdot dx +]
[+int limits _{6}^{15}8cdot 2,17cdot cos left(0,31cdot x-1,57right)cdot dx =]
[=int limits _{6}^{15}60,76cdot sin left(0,31cdot x-1,57right)cdot cos left(0,31cdot x-1,57right)cdot dx +]
[+int limits _{6}^{15}17,36cdot cos left(0,31cdot x-1,57right)cdot dx .]
Вычисляем первый интеграл $I_{1} $:
[I_{1} =60,76cdot int limits _{6}^{15}sin left(0,31cdot x-1,57right)cdot cos left(0,31cdot x-1,57right)cdot dx =]
[=60,76cdot frac{1}{0,31} cdot int limits _{6}^{15}sin left(0,31cdot x-1,57right)cdot dleft(sin left(0,31cdot x-1,57right)right) =]
[=196cdot left[frac{sin ^{2} left(0,31cdot x-1,57right)}{2} right]_{6}^{15} =]
[=98cdot left(sin ^{2} left(0,31cdot 15-1,57right)-sin ^{2} left(0,31cdot 6-1,57right)right)approx -7,64.]
Вычисляем второй интеграл $I_{2} $:
[I_{2} =17,36cdot int limits _{6}^{15}cos left(0,31cdot x-1,57right)cdot dx =]
[=17,36cdot frac{1}{0,31} cdot left[sin left(0,31cdot x-1,57right)right]_{6}^{15} =]
[=56cdot left(sin left(0,31cdot 15-1,57right)-sin left(0,31cdot 6-1,57right)right)approx -12,57.]
Работа силы вдоль оси $Oy$:
[A_{y} =I_{1} +I_{2} =-7,64-12,57=-20,21.]
Общая работа силы при перемещении вдоль кривой:
[A=A_{x} +A_{y} =135,15-20,21=114,94.]
Назначение. Онлайн калькулятор предназначен для нахождения работы силы F при перемещении вдоль дуги линии L.
- Решение онлайн
- Видеоинструкция
Криволинейные и поверхностные интегралы второго рода
Рассмотрим многообразие σ. Пусть τ(x,y,z)– единичный вектор касательной к σ, если σ – кривая, а n(x,y,z)– единичный вектор нормали к σ, если σ – поверхность в R3. Введём векторы dl=τ·dl и dS=n·dS, где dl и dS – длина и площадь соответствующего участка кривой или поверхности. Будем считать, что dσ=dl, если σ – кривая, и dσ=dS, если σ – поверхность. Назовём dσ ориентированной мерой соответствующего участка кривой или поверхности.
Определение. Пусть заданы ориентированное непрерывное кусочно-гладкое многообразие σ и на σ – вектор-функция F(x,y,z)=P(x,y,z)i+Q(x,y,z)+R(x,y,z). Разобьем многообразие на части многообразиями меньшей размерности (кривую – точками, поверхность –кривыми), внутри каждого полученного элементарного многообразия выберем по точке M0(x0,y0,z0), M1(x1,y1,z1), … ,Mn(xn,yn,zn). Посчитаем значения F(xi,yi,zi), i=1,2,…,n вектор-функции в этих точках,умножим скалярно эти значения на ориентированную меру dσi данного элементарного многообразия (ориентированные длину или площадь соответствующего участка многообразия) и просуммируем. Предел полученных сумм ![]() если онсуществует, не зависит от способа разбиения многообразия на части и выбора точек внутри каждого элементарного многообразия, при условии, что диаметр элементарного участка стремится к нулю, называется интегралом по многообразию (криволинейным интегралом, если σ -кривая и поверхностным, если σ – поверхность) второго рода, интеграломвдоль ориентированного многообразия, или интегралом от вектора F вдоль σ, и обозначается в общем случае
если онсуществует, не зависит от способа разбиения многообразия на части и выбора точек внутри каждого элементарного многообразия, при условии, что диаметр элементарного участка стремится к нулю, называется интегралом по многообразию (криволинейным интегралом, если σ -кривая и поверхностным, если σ – поверхность) второго рода, интеграломвдоль ориентированного многообразия, или интегралом от вектора F вдоль σ, и обозначается в общем случае![]() , в случаях криволинейного и поверхностного интегралов
, в случаях криволинейного и поверхностного интегралов ![]()
![]() соответственно.
соответственно.
Заметим, что если F(x,y,z) – сила, то ![]() – работа этой силы по перемещению материальной точки вдоль кривой, если F(x,y,z) – стационарное (не зависящее от времени) поле скоростей текущей жидкости, то
– работа этой силы по перемещению материальной точки вдоль кривой, если F(x,y,z) – стационарное (не зависящее от времени) поле скоростей текущей жидкости, то ![]() – количество жидкости, протекающей через поверхность S в единицу времени (поток вектора через поверхность).
– количество жидкости, протекающей через поверхность S в единицу времени (поток вектора через поверхность).
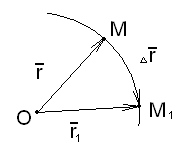
Если кривая задана параметрически  или, что то же самое, в векторной форме,
или, что то же самое, в векторной форме,
то
![]()
и для криволинейного интеграла второго рода имеем
Так как dS=n·dS=(cosα, cosβ, cosγ), где cosα, cosβ, cosγ – направляющие косинусы единичного вектора нормали n и cosαdS=dydz, cosβdS=dxdz, cosγdS=dxdy, то для поверхностного интеграла второго рода получаем
![]()
![]()
Если поверхность задана параметрически или, что тоже самое, в векторной форме
r(u,v)=x(u,v)i+y(u,v)j+z(u,v)k, (u,v)∈D
то
![]()
где – якобианы (определители матриц Якоби, или, что то же самое, матриц производных) вектор-функций ![]()
![]() соответственно.
соответственно.
Если поверхность S может быть задана одновременно уравнениями ![]() то поверхностный интеграл второго рода вычисляется по формуле
то поверхностный интеграл второго рода вычисляется по формуле
![]()
![]()
![]()
где D1, D2, D3 – проекции поверхности S на координатные плоскости Y0Z, X0Z, X0Y соответственно и знак “+” берётся, если угол между вектором нормали и осью, вдоль которой ведётся проектирование, острый, а знак “–“, если этот угол тупой.
Свойства криволинейного и поверхностного интегралов второго рода
Отметим некоторые свойства криволинейного и поверхностного интегралов второго рода.
Теорема 1. Криволинейный и поверхностный интегралы 2-го рода зависят от ориентации кривой и поверхности, точнее
![]() .
.
Теорема 2. Пусть σ=σ1∪σ2 и размерность пересечения dlim(σ1∩σ2)=n-1. Тогда
![]()
Доказательство. Включив в число многообразий разбиения в определении интеграла по многообразию второго рода общую границу σ1 с σ2 получаем требуемое.
Пример №1. Найти работу силы F при перемещении вдоль дуги линии L от точки M0 до точки M1.
F=x2yi+yj;, L: отрезок M0M1
M0(-1;3), M0(0;1)
Решение.
Находим уравнение прямой вдоль отрезка M0M1.
![]() или
или y=-2x+1
dy=-2dx
Пределы изменения x: [-1; 0]
Пример №2. Вычислить ![]() вдоль кривой
вдоль кривой ![]() , если t∈[0;π]
, если t∈[0;π]
Имеем
Пример №3. Вычислить поток вектора f(x,y,z)=(yz,xz,xy)T через часть плоскости x+y+z=a лежащую в первом октанте.
Поток вектора через поверхность равен поверхностному интегралу второго рода ![]() Поверхность однозначно проектируется на все три координатные плоскости. Поэтому интеграл может быть вычислен с помощью проектирования на них. Тогда
Поверхность однозначно проектируется на все три координатные плоскости. Поэтому интеграл может быть вычислен с помощью проектирования на них. Тогда
![]()
![]()
![]()
где S1, S2, S3 – проекции поверхности S на координатные плоскости Y0Z, X0Z, X0Y соответственно. Посчитаем первый из них. Имеем Остальные два интеграла считаются аналогично и также равны ![]() Поэтому поток вектора через поверхность равен
Поэтому поток вектора через поверхность равен ![]() Знаки плюс перед интегралами взяты потому, что вектор нормали к поверхности составляет острые углы со всеми координатными осями. Поэтому поток вектора через поверхность равен
Знаки плюс перед интегралами взяты потому, что вектор нормали к поверхности составляет острые углы со всеми координатными осями. Поэтому поток вектора через поверхность равен ![]() Знаки плюс перед интегралами взяты потому, что вектор нормали к поверхности составляет острые углы со всеми координатными осями.
Знаки плюс перед интегралами взяты потому, что вектор нормали к поверхности составляет острые углы со всеми координатными осями.


Работа переменной силы
Пусть материальная точка  перемещается под действием силы
перемещается под действием силы  , направленной вдоль оси
, направленной вдоль оси  и имеющей переменную величину
и имеющей переменную величину  , где
, где  — абсцисса движущейся точки .
— абсцисса движущейся точки .
Найдем работу  силы по перемещению точки вдоль оси из точки
силы по перемещению точки вдоль оси из точки  в точку
в точку  (
( ). Для этого отрезок
). Для этого отрезок  точками
точками 
 разобьем на
разобьем на  частичных отрезков
частичных отрезков  . Сила, действующая на отрезке
. Сила, действующая на отрезке  , меняется от точки к точке. Но если длина отрезка
, меняется от точки к точке. Но если длина отрезка  достаточно мала, то сила на этом отрезке изменяется незначительно. Ее можно приближенно считать постоянной и равной значению функции в произвольно выбранной точке
достаточно мала, то сила на этом отрезке изменяется незначительно. Ее можно приближенно считать постоянной и равной значению функции в произвольно выбранной точке  . Поэтому работа, совершенная этой силой на отрезке , равна произведению
. Поэтому работа, совершенная этой силой на отрезке , равна произведению  . (Как работа постоянной силы
. (Как работа постоянной силы  на участке .)
на участке .)
Приближенное значение работы силы на всем отрезке есть

Это приближенное равенство тем точнее, чем меньше длина  . Поэтому за точное значение работы принимается предел суммы (36.1). при условии, что наибольшая длина
. Поэтому за точное значение работы принимается предел суммы (36.1). при условии, что наибольшая длина  частичных отрезков стремится к нулю:
частичных отрезков стремится к нулю:
Итак, работа переменной силы , величина которой есть непрерывная функция , действующей на отрезке , равна определенному интегралу от величины  силы, взятому по отрезку .
силы, взятому по отрезку .
В этом состоит физический смысл определенного интеграла.
Аналогично можно показать, что путь  , пройденный точкой за промежуток времени от
, пройденный точкой за промежуток времени от  до
до  , равен определенному интегралу от скорости
, равен определенному интегралу от скорости  :
:
масса  неоднородного стержня па отрезке равна определенному интегралу от плотности
неоднородного стержня па отрезке равна определенному интегралу от плотности  .
.
На этой странице размещён полный курс лекций с примерами решения по всем разделам высшей математики:
- Решение задач по высшей математике
Другие темы по высшей математике возможно вам они будут полезны:

Вычисление работы сил
![]()
![]()
или
Элементарная
работа силы равна:
![]()
![]()
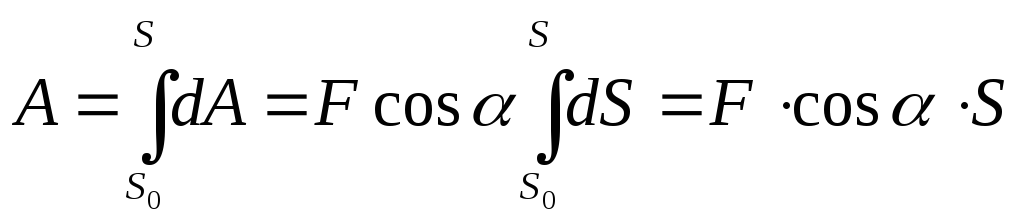
Полная работа силы
вычисляется через интеграл
и ли
ли
Работа силы в некоторых случаях
-
Сила постоянна
по величине. Точка или тело движется
прямолинейно.
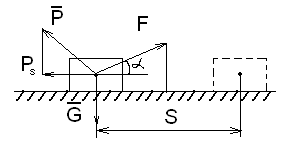
![]()
Знаки работы:
при α < 90°; A
> 0
при α = 90°; A
= 0
при 90°
< α <
180°; A
<
0
-
Р
 абота
абота
силы тяжести.
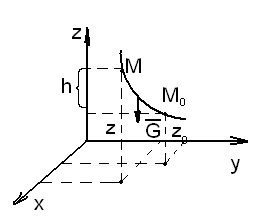
![]()
![]()
![]()
-
Работа силы при
вращательном движении тела вокруг
неподвижной оси.
![]()
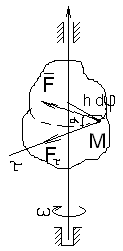
Е![]() сли
сли
М =
const, то
-
Работа силы
упругости пружины.
![]()
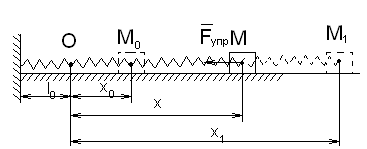
![]()

![]()
Если x0
= 0, то
Единицей измерения работыв СИ
является –![]()
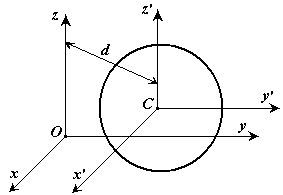
Установим зависимость между моментами
инерции относительно параллельных
осей, одна из которых проходит через
центр масс.
Теорема о моментах инерции относительно
параллельных осей. (Теорема Штейнера)
Момент инерции системы относительно
какой-либо оси равен моменту инерции
относительно параллельной оси, проходящей
через центр масс, плюс произведение
массы системы на квадрат расстояния
между этими осями.
![]()
Доказательство: Пусть имеется две
декартовы системы координат
![]() и
и![]() ,
,
оси которых параллельны. Начало системы![]() находится в центре масс системы. Докажем
находится в центре масс системы. Докажем
теорему для осей![]() и
и![]() .
.
![]()

Координаты связаны между собой
соотношениями:
![]() ,
,![]() ,
,![]()
Работа силы. Мощность.
Одна из основных характеристик силы,
оценивающих действие силы на тело при
некотором его перемещении.
Э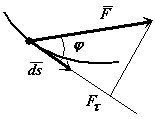 лементарная
лементарная
работа силыскалярная величина
равная произведению элементарного
перемещения на проекцию силы на это
перемещение.
![]() .
.![]() ,
,
![]()
Элементарная работа силыравна
скалярному произведению силы на
элементарное перемещение или на
дифференциал радиуса вектора точки
приложения силы.
![]()
Элементарная работа силыравна
скалярному произведению элементарного
импульса силы на скорость точки.
![]()
Мощностью силыназывается
величина, определяющая работу, совершаемую
силой в единицу времени. В общем случае
мощность равна первой производной по
времени от работы.
![]() ,
,![]()
Мощностьравна скалярному
произведению силы на скорость.
Единицей измерения мощности в СИ является
–
![]()
В технике за единицу силы принимается
![]() .
.
Теорема об изменении кинетической энергии системы.
Эта теорема существует в двух формах.
Теорема.Дифференциал кинетической
энергии системы равен сумме элементарных
работ всех внешних и внутренних сил,
действующих на систему.
![]()
Теорема.Изменение кинетической
энергии системы при ее перемещении из
одного положения в другое равно сумме
работ всех внешних и внутренних сил,
действующих на систему, на соответствующих
перемещениях точек системы при том же
перемещении системы..
![]()
Теорема Кенига.Кинетическая энергия
системы в абсолютном движении складывается
из кинетической энергии центра масс,
если в нем сосредоточить всю массу
системы, и кинетической энергии системы
при ее движении относительно центра
масс.
![]()
Вычисление обобщённых сил
Если система имеет
n
степеней свободы, то у неё n
обобщённых координат, независимых друг
от друга (q1,
q2,
…, qn)
и n
возможных перемещений (δq1,
δq2,
…, δqn).
Сумма элементарных работ, приложенных
к системе сил, на возможные перемещения
системы равна
![]() .
.
Обобщёнными силами
называются коэффициенты, стоящие перед
соответственными возможными перемещениями.
Так как обобщённые координаты не зависят
друг от друга, то для определения
обобщённой силы системе необходимо
сообщить возможные перемещения,
соответствующие координатам, а все
остальные возможные перемещения принять
за нуль, то есть для определения Q1
необходимо, чтобы δq1
≠ 0, δq2
= 0, δq3
= 0, …, δqn
= 0, тогда
![]()
 .
.
Размерность
обобщённых сил зависит от размерности
обобщённых координат: если qj
= x
(м), то Qj
– сила (Н);
если qj
= φ
(рад), то Qj
– момент (Н∙м).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
