В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.

В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
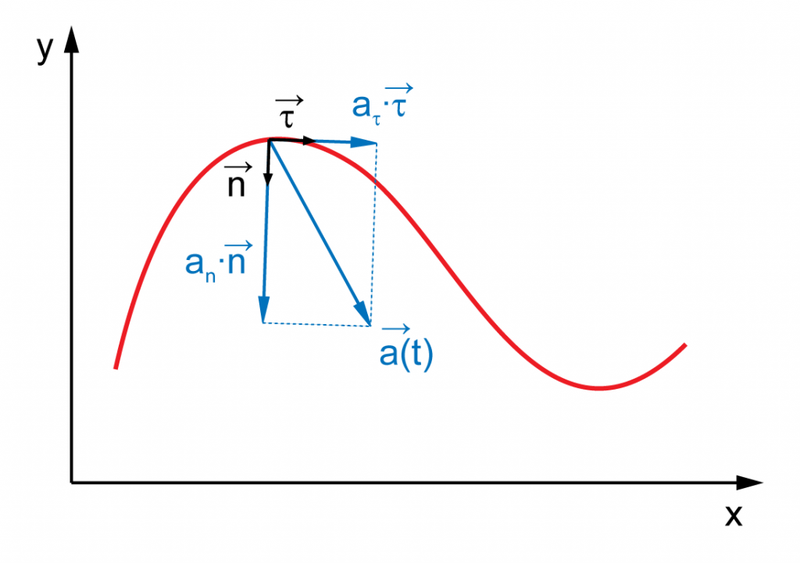
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
Здесь R – радиус окружности, по которой движется тело.
Закон равноускоренного движения
Рассмотрим далее закон равноускоренного движения, то есть движения с постоянным ускорением. Будем рассматривать простейший случай, когда тело движется вдоль оси x.
Здесь – x нулевое- начальная координата. v нулевое – начальная скорость. Продифференцируем по времени, и получим скорость
Производная по скорости от времени даст значение ускорения a, которое является константой.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.

Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
Путь, время, скорость

S – путь
v – скорость
t – время
Равномерное движение
x – координата
x0 – начальная координата
v – скорость
t – время
Равномерно ускоренное движение: ускорение
a – ускорение
v – скорость
v0 – начальная скорость
t – время
Равномерно ускоренное движение: скорость
v – скорость
v0 – начальная скорость
a – ускорение
t – время
Равномерно ускоренное движение: путь
s – путь
v – скорость
t – время
a – ускорение
Равномерно ускоренное движение: координата
x – координата
x0 – начальная координата
v – скорость
t – время
a – ускорение
Высота тела, брошенного вертикально вверх (вниз)
h – высота
h0 – начальная высота
v0 – начальная скорость
t – время
g – ускорение свободного падения
Скорость тела, брошенного вертикально вверх (вниз)
v – скорость
v0 – начальная скорость
g – ускорение свободного падения
t – время
Скорость, ускорение, время
v – скорость
a – ускорение
t – время
Скорость свободно падающего тела
v – скорость
g – ускорение свободного падения
t – время
Центростремительное ускорение
a – центростремительное ускорение
v – скорость
R – радиус
Угловая скорость
ω – угловая скорость
φ – угол
t – время
Равномерное круговое движение
l – длина дуги окружности
R – радиус
φ – угол
Равномерное круговое движение: линейная скорость
v – линейная скорость
R – радиус
ω – угловая скорость
Период вращения
T – период
t – время
N – число вращений
Период вращения
T – период
R – радиус
v – линейная скорость
Период вращения
T – период
ω – угловая скорость
Центростремительное ускорение
a – центростремительное ускорение
R – радиус
T – период вращения
Центростремительное ускорение
a – центростремительное ускорение
R – радиус
n – частота вращения
Частота вращения
n – частота вращения
T – период вращения
Центростремительное ускорение
a – центростремительное ускорение
ω – угловая скорость
R – радиус
Дальность броска тела, брошенного под углом к горизонту
x – координата (дальность)
v0 – начальная скорость
t – время
α – угол
Высота подъема тела, брошенного под углом к горизонту
y – координата (высота подъема )
v0 – начальная скорость
t – время
g – ускорение свободного падения
α – угол
Вертикальная скорость тела, брошенного под углом к горизонту
v_y – вертикальная скорость
v0 – начальная скорость
α – угол
g – ускорение свободного падения
t – время
Максимальная высота подъема тела, брошенного под углом к горизонту
h_макс – максимальная высота
v0 – начальная скорость
α – угол
g – ускорение свободного падения
Общее время движения тела, брошенного под углом к горизонту
t – время
v0 – начальная скорость
α – угол
g – ускорение свободного падения
Максимальная дальность броска тела, брошенного под углом к горизонту
s_макс – максимальная дальность
v0 – начальная скорость
g – ускорение свободного падения
Дальность броска тела, брошенного горизонтально
x – координата (дальность)
x0 – начальная координата
v – скорость
t – время
Высота подъема тела, брошенного горизонтально
y – координата (высота подъема)
y0 – начальная координата (высота)
g – ускорение свободного падения
t – время
Общее время движения тела, брошенного горизонтально
t_макс – максимальное время
h – высота
g – ускорение свободного падения
Радиус кривизны траектории
В этой статье приведены две задачи, которые помогут вам научиться определять радиус кривизны траектории при движении тела под углом к горизонту. Каждая из задач представляет собой целый набор, поэтому неясностей не должно остаться.
Задача 1.
Тело брошено со скоростью 10 м/с под углом к горизонту. Найти радиусы кривизны траектории тела в начальный момент его движения, спустя время 0,5 с и в точке наивысшего подъема тела над поверхностью земли.
Как известно, радиус кривизны траектории связан с нормальным ускорением и скоростью формулой:
Откуда :
То есть, чтобы найти радиус кривизны траектории в любой точке, необходимо лишь знать скорость и нормальное ускорение, то есть ускорение, перпендикулярное вектору скорости. Рассмотрим все заданные точки и определим в них скорости и нужные составляющие ускорения.

К задаче 1
Самое простое – это определение этих величин в точке наивысшего подъема. Действительно, вертикальная составляющая скорости здесь равна нулю, поэтому скорость тела в данной точке равна горизонтальной составляющей, а ускорение, нормальное к вектору этой скорости – это ускорение свободного падения, поэтому
Вторая по простоте расчета – точка начала движения. Скорость в ней нам уже известна, осталось с ускорением разобраться. Ускорение свободного падения разложим на две составляющие: и . Первая – перпендикулярна скорости, она-то нам и нужна. Определяем радиус:
Наконец, точка, в которой тело окажется через пол-секунды.
Наше тело будет лететь по горизонтали с постоянной скоростью, равной . По вертикали тело будет двигаться равнозамедленно до середины траектории (наивысшей точки), а затем равноускоренно. Определим, успеет ли тело добраться до апогея:
Простой прикидочный расчет показывает, что нужная нам точка находится на первой половине траектории, где тело еще двигается вверх. Тогда его скорость по оси :
Определим полную скорость тела в момент времени :
Угол наклона вектора скорости к горизонту в этот момент равен:
А можно было сразу и косинус найти:
Тогда искомый радиус кривизны траектории равен:
Ответ: м, м, м.
Задача 2.
Под каким углом к горизонту нужно бросить шарик, чтобы а) радиус кривизны траектории в начальный момент времени был в 8 раз больше, чем в вершине; б) центр кривизны вершины траектории находился бы на поверхности земли?
Запишем условие задачи так: а) , б).
а)Как и в предыдущей задаче, определяем радиус кривизны траектории в точке броска. Скорость нам известна, а нормальным ускорением будет проекция ускорения свободного падения:
Определим теперь радиус кривизны в вершине:
По условию :
б) Мы уже определили , осталась максимальная высота подъема.
Время определяем из условия равенства нулю вертикальной составляющей скорости так же, как мы это делали в предыдущей задаче:
Приравниваем и :
Откуда .
Ответ: а) , б) .
2 комментария
Есин из Хотам и ПВ
✉️
17.02.2022 15:20:44
Thank you very much
Jahongir
✉️
12.04.2022 19:14:12
Спасибо огромное! Полностью разобрался 🙂 Успехов вам!
![]()
![]() Введение
Введение
Физика
в
системе
естественных
наук.
Общая
структура
и
задачи
дисциплины
«Физика».
Экспериментальная
и
теоретическая
физика.
Физические
величины, их
измерение
и
оценка
погрешностей.
Системы
единиц
физических
величин.
Краткая
история
физических
идей,
концепций
и
открытий.
Физика
и
научно-технический
прогресс.
-
Механическое движение. Пространство и время в механикеи ньютона. Кинематическое уравнение движения. Радиус-вектор. Траектория. Путь. Перемещение
Механическим
движением называется изменение взаимного
расположения тел или их частей.
Раздел физики,
занимающийся изучением закономерностей
механического движения и взаимодействия
тел, называется механикой. При этом под
механическим действием на тело понимают
такое воздействие со стороны других
тел, которое приводит к изменению
состояния механического движения
рассматриваемого тела или к его
деформации, т.е. к изменению взаимного
расположения его частей.
Классическая
механика рассматривает движение
макроскопических тел, скорости которых
много меньше скорости света в вакууме
с= 310
м/с. Основы классической механики были
разработаны И.Ньютоном, поэтому ее
обычно называют ньютоновской механикой.
Решая
ту или иную конкретную задачу механики,
всегда выделяют из множества тел только
те, которые играют в данной задаче
существенную роль. Эта совокупность
тел называется механической системой.
Мы будем изучать
два основных раздела классической
механики: кинематику и динамику.
Кинематика
описывает механическое движение тел
безотносительно к причинам, вызвавшим
движение. Динамика занимается исследованием
влияния взаимодействия тел на их
механическое движение.
В механике для
описания реальных тел пользуются в
зависимости от условий конкретной
задачи различными упрощенными моделями:
материальная точка, абсолютно твердое
тело, абсолютно упругое тело, абсолютно
неупругое тело и т.д. Выбор той или иной
модели нужно производить так, чтобы
учесть все существенные особенности
поведения реального тела в данной задаче
и отбросить все второстепенные,
неоправданно усложняющие решение.
Материальной
точкой называется тело, формой и размерами
которого в данной задаче можно пренебречь.
Одно и то же
тело в одних задачах можно считать
материальной точкой, а в других – нельзя.
Например, рассматривая движение Земли
по орбите вокруг Солнца, ее можно считать
материальной точкой, т.к. размеры Земли
много меньше радиуса орбиты. В то же
время при рассмотрении движения тел по
Земле ее уже нельзя считать материальной
точкой. Любое протяженное тело или
систему тел, образующих механическую
систему, можно представить как систему
материальных точек. Для этого все тела
системы разбивают на такие части,
размерами каждой из которых можно
пренебречь в сравнении с размерами
самих тел.
Абсолютно
твердым называется тело, деформацией
которого можно пренебречь. При любых
взаимодействиях расстояния между любыми
двумя точками абсолютно твердого тела
остаются неизменными.
Все
тела существуют в пространстве и во
времени. Любое тело имеет объем, т.е.
пространственную протяженность.
Пространство и время являются основными
категориями движения материи. Пространство
определяет порядок сосуществования
отдельных объектов. Время выражает
порядок смены состояний, составляющих
любое движение. Оно служит мерой
длительности процесса. Пространство и
время служат основой конструирования
теоретических моделей, интерпретирующих
экспериментальные данные, и имеют
решающее значение при построении
физической картины мира.
В
механике Ньютона существует понятие
абсолютного пространства и абсолютного
времени, которые не зависят друг от
друга и от существующих в них материальных
объектов и протекающих процессов. Длина
масштабов и времени считаются абсолютными.
Любой масштаб (расстояние) считается
одинаковым во всех системах отсчета,
т.е. не зависит от движения. То же касается
и времени.
Положение тела
в пространстве определяется только
относительно каких-либо других тел. Для
однозначного определения положения
исследуемого тела в произвольный момент
времени необходимо выбрать систему
отсчета.
А бсолютно
бсолютно
твердое тело и жестко связанную с ним
систему координат, снабженную часами,
используемую для определения положения
материальной точки в пространстве в
любой момент времени, называют системой
отсчета.
При
этом под часами подразумевается любое
устройство, измеряющее промежутки
времени между событиями. Начало отсчета
времени выбирается произвольно. Абсолютно
твердое тело, с которым связывают систему
координат, называют телом отсчета.
В
качестве системы координат в классической
механике наиболее часто используется
прямоугольная декартова система
координат, имеющая ортонормированный
базис, заданный ортами
![]() (рис.1.1). Положение точкиA
(рис.1.1). Положение точкиA
относительно
этой системы координат задают
радиус-вектором
![]() (это вектор, проведенный из начала
(это вектор, проведенный из начала
координат в данную точку),
![]() (1.1)
(1.1)
либо
тремя координатами x,
y,
z.
При
движении точки A
ее координаты и радиус-вектор изменяются
с течением времени, поэтому для задания
закона движения этой точки необходимо
указать три непрерывные и однозначные
функции времени
![]()
либо векторную
функцию
![]() (1.2)
(1.2)
 Выражения вида
Выражения вида
(1.2) называются кинематическими уравнениями
движения.
Траекторией
называется линия, которую описывает в
пространстве движущаяся точка. В
зависимости от формы траектории различают
прямолинейное и криволинейное движение.
Движение называют плоским, если все
точки траектории лежат в одной плоскости.
В этом случае уравнение траектории
удобно задавать в виде y=
y(x).
Механическое
движение тела относительно: его характер,
а, следовательно, и форма траектории,
зависят от выбора системы отсчета.
Например, тело, свободно падающее с
полки в вагоне равномерно движущегося
поезда, в системе отсчета, связанной с
вагоном, движется вертикально вниз, а
в системе отсчета, связанной с Землей,
совершает плоское движение по параболе.
 Длиной
Длиной
пути, пройденного точкой за некоторый
промежуток времени, называется сумма
длин всех участков траектории, пройденных
за этот промежуток. Длина пути
![]() –
–
это скалярная неотрицательная величина.
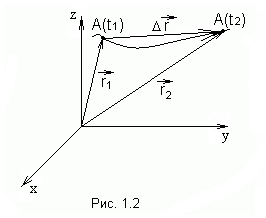
Пусть
в момент времени
![]() положение точки характеризовалось
положение точки характеризовалось
радиус-вектором![]() ,
,
а в момент времени![]() радиус-вектором
радиус-вектором![]() (рис.1.2). Перемещением точки за промежуток
(рис.1.2). Перемещением точки за промежуток
времени![]() называется вектор
называется вектор![]() , проведенный из начального положения
, проведенный из начального положения
точки ( в момент времени![]() )
)
в ее конечное положение ( в момент времени![]() ).
).
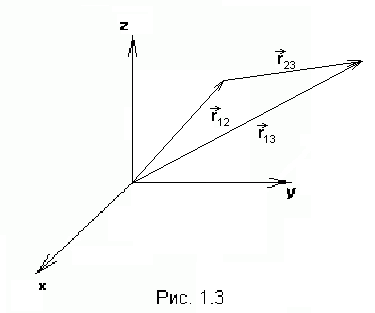
Если
точка совершает последовательно два
перемещения
![]() и
и![]() ,
,
то результирующее перемещение равно
векторной сумме (рис.1.3):![]() .
.
1.2.
ОСНОВНЫЕ КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ: СКОРОСТЬ И
УСКОРЕНИЕ. ФИЗИЧЕСКИЙ СМЫСЛ ПРОИЗВОДНОЙ
И ИНТЕГРАЛА. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
ДВИЖЕНИЯ. РОЛЬ НАЧАЛЬНЫХ УСЛОВИЙ. СИСТЕМЫ
КООРДИНАТ И ИХ ПРЕОБРАЗОВАНИЯ. НОРМАЛЬНОЕ
И ТАНГЕНЦИАЛЬНОЕ УСКОРЕНИЕ
 В
В
физике под скоростью понимают векторную
величину, характеризующую быстроту
перемещения материальной точки по
траектории и направление движения в
каждый момент времени. Разобьем траекторию
на бесконечно малые участки длины
![]() (рис.1.4), каждому из этих участков
(рис.1.4), каждому из этих участков
сопоставим бесконечно малое перемещение![]() .
.
Разделив это перемещение на соответствующий
промежуток времени![]() ,
,
получим мгновенную скорость в данной
точке траектории:
![]() .
.
(1.3)
Таким
образом, скорость есть первая производная
радиус-вектора точки по времени.
Перемещение
![]() совпадает с бесконечно малым элементом
совпадает с бесконечно малым элементом
траектории, следовательно вектор![]() направлен
направлен
по касательной к траектории (рис.1.4).
Разложив вектор
скорости по базису системы координат,
получаем:
![]() ,
,
где
![]() – проекции вектора
– проекции вектора![]() на координатные оси. Модуль вектора
на координатные оси. Модуль вектора
скорости равен![]() .
.
Можно показать,
что модуль скорости равен производной
пути по времени:
![]()
Движение
называется равномерным, если вектор
скорости остается постоянным по величине
и направлению. В противном случае говорят
о переменном движении.
В
соответствии с формулой (1.3), элементарное
перемещение материальной точки
![]() .
.
Тогда перемещение из положения 1 в
положение 2 (рис.1.2) равно интегралу

Пройденный
путь определяется выражением
 .
.
Среднее
значение модуля скорости за промежуток
времени от
![]() до
до![]() равно
равно .
.
Средний вектор скорости: .
.
Вектор скорости
можно представить в виде
![]() ,
,
(1.4)
где
![]() – модуль скорости,
– модуль скорости,![]() –
–
орт вектора![]() .
.
Введем орт касательной к траектории![]() ,
,
условившись направлять его в ту же
сторону, что и![]() .
.
Тогда, очевидно, орты![]() и
и![]() совпадут, и можно записать
совпадут, и можно записать![]()
 Подставив
Подставив
в выражение (1.3) радиус-вектор в виде
![]() ,
,
получаем
![]() .
.
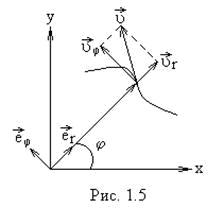
Для
простоты рассуждений будем считать
траекторию плоской кривой, лежащей в
плоскости
![]() (рис.1.5). В записанной формуле первая
(рис.1.5). В записанной формуле первая
составляющая вектора скорости![]() направлена вдоль радиус-вектора
направлена вдоль радиус-вектора![]() и характеризует быстроту изменения
и характеризует быстроту изменения
модуля![]() .
.
Вторая составляющая равна![]() и характеризует быстроту изменения
и характеризует быстроту изменения
радиус-вектора по направлению.
Из
математики известно:
![]() ,
,
где![]() – угол между радиус-вектором и осью
– угол между радиус-вектором и осью![]() ,
,![]() – перпендикулярный к радиус-вектору
– перпендикулярный к радиус-вектору
орт, направленный в сторону возрастания
угла![]() .
.
Подставив![]() в формулу для
в формулу для![]() ,
,
получаем
![]() .
.
Таким
образом, составляющая
![]() и
и
соответствующий орт![]() связаны с изменением угла
связаны с изменением угла![]() .
.
 Очевидно,
Очевидно,
что векторы
![]() и
и![]() взаимно перпендикулярны, следовательно
взаимно перпендикулярны, следовательно

Быстрота
изменения вектора скорости
![]() называется ускорением материальной
называется ускорением материальной
точки и определяется производной вектора![]() по времени:
по времени:
![]() .
.
(1.5)
Cпроектируем
это выражение на координатные оси:
![]() .
.
Обратная
задача кинематики состоит в том, чтобы,
зная зависимость от времени ускорения
![]() материальной точки, найти зависимость
материальной точки, найти зависимость
скорости![]() и
и
радиус-вектора от времени![]() .
.
Для получения однозначного решения
этой задачи одной зависимости![]() оказывается недостаточно. Необходимо
оказывается недостаточно. Необходимо
знать еще начальные условия, т.е. скорость![]() и
и
радиус-вектор![]() точки
точки
в момент времени, принятый за начальный.
Рассмотрим
равноускоренное движение,
![]() .
.
Изменение скорости точки за времяt,
очевидно, равно интегралу
![]() .
.
Чтобы найти![]() ,
,
надо знать скорость![]() в
в
начальный момент времени. Тогда![]() .
.
Изменение
радиус-вектора точки за время t
равно
интегралу
![]() .
.
Чтобы найти![]() ,
,
надо знать радиус-вектор в начальный
момент времени![]() .
.
Тогда![]() .
.
Р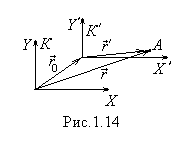 ассмотрим
ассмотрим
две произвольные системы отсчетаК
и К’,
движущиеся определенным образом друг
относительно друга. В К-системе
материальная точка А
имеет скорость
![]() и ускорение
и ускорение![]() .
.
Положение материальной точки в этой
системе отсчета задано радиус-вектором![]() .
.
ВК’-системе
скорость точки
![]() ,
,
ускорение![]() ,
,
радиус-вектор![]() .К’-система
.К’-система
движется относительно К–
системы со скоростью
![]() и ускорением
и ускорением![]() ,
,
в начальный момент времени начало
отсчетаК’-системы
в К-системе
задано радиус-вектором
![]() (рис.1.14). Тогда, как следует из рис.1.14,
(рис.1.14). Тогда, как следует из рис.1.14,![]() .
.
За промежуток времениdt
точка А
совершит в К
–системе перемещение
![]() . Это перемещение складывается из
. Это перемещение складывается из
перемещения![]() вместе сК’-системой
вместе сК’-системой
и перемещения
![]() относительноК’-системы,
относительноК’-системы,
![]() .
.
Разделив это выражение наdt,
получим формулу преобразования скорости:
![]() .
.
Продифференцировав
по времени, находим формулу преобразования
ускорения:
![]() .
.
ЕслиК’-система
движется относительно К-системы
без ускорения,
![]() =0,
=0,
тогда![]() .
.
Этот факт будет прокомментирован позднее
(см.раздел Динамика).
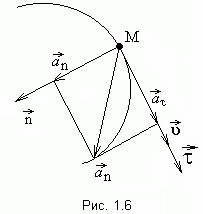
Подставив
в формулу (1.5) выражение (1.4), получаем:
![]() .
.
Продифференцировав, имеем:![]() .
.
Следовательно, вектор
![]() можно представить в виде суммы двух
можно представить в виде суммы двух
взаимно перпендикулярных составляющих
(рис.1.6). Первая направлена по касательной
к траектории и называется тангенциальным
или касательным ускорением
![]() .
.
(1.6)
Вторая
составляющая направлена по
![]() ,
,
т.е. перпендикулярно касательной, по
нормали к траектории, и называется
нормальным ускорением![]() .
.
Исследуем
свойства обеих составляющих, ограничившись
случаем плоского движения. Модуль
тангенциального ускорения, как следует
из (1.6), равен
![]() .
.
Если![]() (скорость растет по величине), вектор
(скорость растет по величине), вектор![]() направлен в ту же сторону, что и
направлен в ту же сторону, что и![]() (т.е. в ту же сторону, что и
(т.е. в ту же сторону, что и![]() ).
).
Если![]() (скорость со временем уменьшается),
(скорость со временем уменьшается),
векторы![]() и
и![]() направлены противоположно. При равномерном
направлены противоположно. При равномерном
движении![]() .
.
 Нормальное
Нормальное
ускорение определяется величиной
![]() ,
,
т.е. быстротой изменения во времени
направления касательной к траектории.
Эта быстрота будет тем больше, чем
сильнее искривлена траектория и чем
быстрее перемещается частица по
траектории.
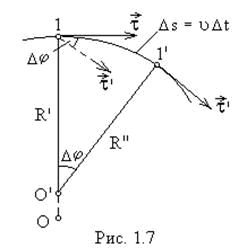
Степень
искривления плоской кривой характеризуется
кривизной С,
которая определяется выражением
![]()
где
![]() – угол между касательными к кривой в
– угол между касательными к кривой в
точках, отстоящих друг от друга на
расстояние![]() (рис.1.7). Таким образом, кривизна определяет
(рис.1.7). Таким образом, кривизна определяет
скорость поворота касательной при
перемещении вдоль кривой. Величина,
обратная кривизнеС,
называется радиусом кривизны
![]() в
в
данной точке:![]()
Радиус кривизны
представляет собой радиус окружности,
которая сливается в данном месте с
кривой на бесконечно малом ее участке.
Центр такой окружности называется
центром кривизны для данной точки
кривой.
Радиус
и центр кривизны в точке 1 (рис.1.7) определим
следующим образом. Возьмем вблизи точки
1 точку 1.
Построим в этих точках касательные
![]() и
и![]() , перпендикуляры к которым пересекутся
, перпендикуляры к которым пересекутся
в некоторой точкеО.
При этом для кривой, не являющейся
окружностью, расстояния
![]()
и
![]()
несколько отличаются друг от друга.
Если точку 1
приближать к точке 1, пересечение
перпендикуляров O
будет перемещаться вдоль прямой
![]()
и в пределе окажется в некоторой точке
О.
Эта точка и будет центром кривизны для
точки 1. Расстояния R
и R
будут стремиться к общему пределу
![]() ,
,
равному радиусу кривизны.
Как
известно из математики,
![]()
(1.7)
Здесь
![]() – орт нормали к траектории, направленный
– орт нормали к траектории, направленный
в сторону поворота вектора![]() при движении частицы по траектории.
при движении частицы по траектории.
Величину![]() можно связать с радиусом кривизны
можно связать с радиусом кривизны
траектории и скоростью частицы![]() .
.
Из рис. 1.7 следует, что![]() где
где![]() – угол поворота вектора
– угол поворота вектора![]() за время
за время![]() (совпадающий с углом между перпендикулярами
(совпадающий с углом между перпендикулярами![]()
и
![]() ),
),
![]() – средняя скорость на пути
– средняя скорость на пути![]() .
.
Отсюда![]() .
.
В пределе при![]()
0 приближенное равенство станет строгим,
средняя скорость
![]() превратится в мгновенную скорость
превратится в мгновенную скорость![]() в точке 1,
в точке 1,![]() -
-
в радиус кривизны
![]() .
.
В результате получится равенство
![]() (1.8)
(1.8)
– быстрота поворота
вектора скорости пропорциональна
кривизне траектории и скорости перемещения
частицы по траектории.
Подставив
(1.7) в формулу (1.8), получим
![]() ,
,
тогда нормальное ускорение равно
![]() .
.
 Вектор
Вектор
ускорения при движении материальной
точки по плоской кривой равен
![]() ,
,
а его модуль![]()
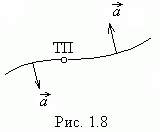
При
прямолинейном движении нормальное
ускорение отсутствует. Интересным
является тот факт, что
![]() обращается в ноль в точке перегиба
обращается в ноль в точке перегиба
криволинейной траектории (точка ТП на
рис.1.8). По обе стороны от этой точки
векторы![]() направлены в разные стороны. Вектор
направлены в разные стороны. Вектор![]() не может изменяться скачком, изменение
не может изменяться скачком, изменение
направления на противоположное происходит
плавно с обращением![]() в ноль в точке перегиба.
в ноль в точке перегиба.
Если
материальная точка движется с постоянными
по величине скоростью и ускорением, то
![]() ,
,
так что![]() и
и![]() ,
,
поэтому![]() – частица движется по линии постоянной
– частица движется по линии постоянной
кривизны, т.е. по окружности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
План урока:
Механическое движение. Система отсчёта. Закон относительности движения
Уравнения движения. Радиус-вектор. Проекция вектора
Траектория. Путь. Перемещение
Равномерное прямолинейное движение: скорость и уравнение движения
Механическое движение. Система отсчёта. Закон относительности движения
Механическим движением в физике называется изменение с течением времени положения тела (или его частей) в пространстве относительно других тел.
То есть, чтобы сказать, что тело или система совершает механическое движение, нам необходимо: 1) наблюдать его во времени; 2) сравнивать его положение с положением какого-то другого тела (относительно этого тела).
Например, пассажир в едущем автомобиле неподвижен относительно кресла, на котором он сидит, но он движется относительно людей, стоящих на автобусной остановке и самой остановки. А сама автобусная остановка неподвижна относительно стоящих людей, ждущих автобус (см. рисунок 1). Однако она движется относительно проезжающих мимо машин. В первом случае наблюдаемым объектом был человек в машине, а точкой отсчета кресло и люди на остановке. Во втором случае наблюдаемой была автобусная остановка, а точками отсчета – люди на остановке и проезжающие мимо машины.

Рисунок 1 – Иллюстрация к примеру
Из примеров можно сделать вывод, что важно, какой именно объект находится под наблюдением и относительно какого объекта – тела отсчета – рассматривается его движение. Отсюда можно сформулировать закон относительности движения: характер движения тела зависит от того, относительно какого объекта мы рассматриваем данное движение.
Тело (или точка) отсчета, связанная с ним система координат и часы, вместе образуют систему отсчета. То есть все сказанное выше можно переформулировать в одно предложение: для наблюдения механического движения важно в какой системе отсчета будет происходить наблюдение.
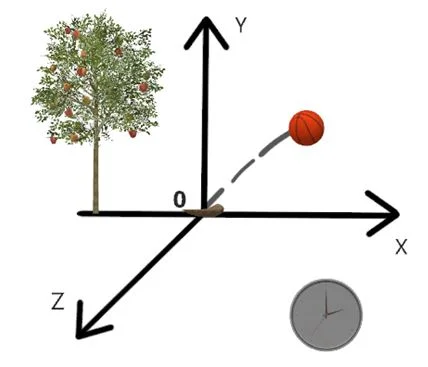
Рисунок 2 – Пример системы отсчета (наблюдаемы объект – летящий мяч, тело отсчета – камень, лежащий в начале координат, система координат и секундомер для отсчета времени)
Однако объекты могут быть очень сложными для наблюдения. Например, автомобиль едет по прямой несколько километров и необходимо описать его движение относительно камня на обочине. Казалось бы, все просто. Но как именно описать движение автомобиля, если корпус его движется по прямой, а колеса совершают вращательные движения.
Для удобства решения подобных задач принято упрощение: если размер и форма тела в данной задаче не играют важной роли для наблюдателя, можно считать это тело за материальную точку.
Материальная точка – это такое тело, размером и формой которого в условиях данной задачи можно пренебречь.
Приведем пример: когда автобус едет из города А в город Б, его можно рассматривать как материальную точку. Когда пассажир идет из одного конца этого автобуса в другой, считать автобус материальной точкой нельзя. В общем случае можно сказать, что тело можно считать материальной точкой, если его размеры значительно меньше расстояния, на которое оно перемещается.
Уравнения движения. Радиус-вектор. Проекция вектора
Для описания движения тела необходимо уметь рассчитывать его положение в каждый момент времени. Как это сделать?
Самый очевидный способ – координатный. Если вернуться к примеру на рисунке 2, можно увидеть, что летящий мяч в каждый момент времени имеет три координаты по осям OX, OY и OZ. Эти координаты являются функциями времени (т.е. они зависят от времени), а значит, их можно записать в виде системы:

Вид этих уравнений будет зависеть от многих вещей: от того, с какой силой бросили мяч в начале, от массы мяча, под каким углом его бросили и так далее. В любом случае, если эти уравнения заданы, можно найти координаты (то есть положение) тела в любой момент времени. Поиск этих уравнений – основная задача кинематики.
Эта система является кинематическими уравнениями движения тела или материальной точки, записанными в координатной форме. Повторим: если вид уравнений движения задан, можно узнать координату движущейся точки в любой момент времени.
В общем случае, координат три, но иногда можно обойтись двумя или даже одной координатой. Например, для описания движения бильярдного шара достаточно двух координат (так как шар не может двигаться вверх и вниз), а для описания движения шарика, катящегося по прямому горизонтальному желобку достаточно одной координаты (шарик не может двигаться вверх-вниз и вправо-влево).
Еще один способ описания движения – векторный.
*Перед дальнейшим прочтением данной статьи желательно вспомнить основную теорию по теме «Векторы» и «Метод координат»
Вектор, проведенный из начала координат к материальной точке, называется радиус-вектором (см. рисунок 3).

Рисунок 3 – Радиус-вектор (серой линией изображены траектория движения материальной точки, r1 и r2* радиус-векторы, проведенные к этой материальной точке в разные моменты времени)
Радиус-вектор проведенный к материальной точке в разные моменты времени будет разным. Значит, его тоже можно представить, как функцию времени:
r = r(t)
Такая функция и будет уравнением движения в векторной форме. Если ее вид задан, можно описать движение тела с той же полнотой, как и при координатной записи.
Еще раз обозначим отличия: при записи уравнения движения в координатной форме в каждый момент времени наблюдающий будет знать три координаты тела; при записи в векторной форме в каждый момент времени известен радиус-вектор (его модуль и направление). Обе записи равносильны.
*На письме векторы обычно обозначаются стрелкой сверху, над величиной. Однако в печатном тексте не всегда удобно нагромождать формулы дополнительными знаками, поэтому в печати векторные величины пишут просто жирным шрифтом. В данной статье далее жирным шрифтом будут написаны только векторные величины.
Покажем, что векторная и координатная записи равносильны. Для этого необходимо вспомнить, как построить проекцию вектора на ось (см. рисунок 4).

Рисунок 4 – Построение проекции вектора на ось
Чтобы построить проекцию вектора на ось, необходимо опустить перпендикуляра из начала и конца вектора на эту ось. Длина получившегося отрезка между проекциями начала и конца вектора, взятая со знаком «+», если вектор а сонаправлен с осью Х, или со знаком «-», если вектор а противонаправлен оси Х, – это и есть искомая проекция.
Если вектор выходит из начала координат, задача облегчается – необходимо опустить перпендикуляр только из конца вектора.
Напоминания из геометрии:
-
два вектора равны, если они параллельны или лежат на одной прямой, сонаправлены, а их модули равны;
-
проекции равных векторов равны.
Рассмотрим пример (см. рисунок 5)

Рисунок 5 – Задача на нахождение проекции векторов
Предлагаем читателю самому подумать, а затем сравнить свои рассуждения с приведенными ниже.
Итак, вектор а: его начала соответствует координате хн=1, а конец хк = 4. Значит ax = хк – хн = 4-1 = 3. Вектор b: его начало лежит в точке хн=2, а конец хк =0. Значит bx = хк – хн = 0-2 = -2.
В двумерном случае, проецировать нужно на две оси, но принцип остается тем же.
Иногда еще нужно находить составляющие компоненты вектора ах и ау. Рассмотрим пример, для простоты возьмем вектор, выходящий из начал координат (см. рисунок 6).
Сумма векторов ах и ау равна а. Модули векторов ах и ау численно равны координатам точек, куда попали перпендикуляры, опущенные из конца вектора а на оси ОХ и ОУ.
Еще следует отметить, что, если известен угол β между вектором а и осью ОХ, воспользовавшись основами тригонометрии, можно найти величины проекций:
ах = а*cos(β);
аy = а*sin(β).
Если бы вектор а совпадал с радиус-вектором какой-нибудь точки, то величины ах и ау совпадали бы с координатами тела по осям ОХ и ОY.
Способ с использованием тригонометрических функций удобен, когда координата конца вектора попадает в нецелое число и опустив перпендикуляр на ось его трудно найти точно. В физических задачах такое часто случается.

Рисунок 6 – Нахождение компонент вектора а
Рассмотрим пример (см. рисунок 7). Модуль вектора r равен 2. Сам вектор направлен под углом в 45 градусов к оси ОХ. Необходимо найти величины проекций (они же координаты) этого вектора на оси ОХ и ОУ.

Рисунок 7 – Задача на нахождение проекций вектора в двумерном пространстве
В общем случае радиус-вектор находится в трехмерном пространстве (см. рисунок 8). Построение проекции осуществляется по тому же принципу, что и в рассмотренных выше примерах. Когда строятся проекции на оси ОХ и ОУ, перпендикуляр сначала опускается на плоскость, в которой лежат оси ОХ и ОУ, а затем точка, в которую упал перпендикуляр к плоскости, проецируется на оси ОХ и ОУ.
Точки, в которые попал перпендикуляры к осям – rx, ry, rz – это и есть координаты x, y, z тела в текущий момент времени.
Следует оговориться, что большинство задач 10-го класса будут ограничиваться двумерным пространством.
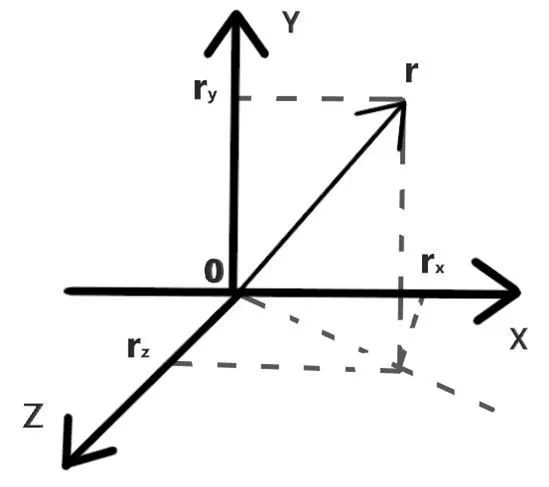
Рисунок 8 – Построение проекций радиус-вектора
Траектория. Путь. Перемещение
Траектория – это линия, вдоль которой движется тело.
Траектория движения может быть прямолинейной, если тело движется по прямой линии, и криволинейной, если тело движется по кривой.
Путь (S), пройденный телом, равен длине траектории.
Перемещение (r)* – это вектор, проведенный из начала пути в конец.
В случае прямолинейного движения путь и модуль перемещения тела совпадают (см. рисунок 9а). В случае криволинейного – путь и перемещение различаются (см. рисунок 9б), так как длина линии движения тела больше длины вектора, соединяющего начало и конец траектории.

Рисунок 9 – Путь (S) и перемещение (r) при прямолинейном (а) и криволинейном (б) движении
*Иногда перемещение так же, как и путь, называют буквой S – (на письме с вектором над ней, при печати – жирным шрифтом, так как это векторная величина). В данной статье, чтобы не путаться, перемещение называется только буквой r. В целом, обозначения равноправны, поэтому при решении задач можно использовать то, которое удобнее. Однако не стоит забывать отмечать, что именно обозначено под той или иной буквой.
Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
- равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см. рисунок 8). Радиус-вектор, проведенный в точку A обозначим r0, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.
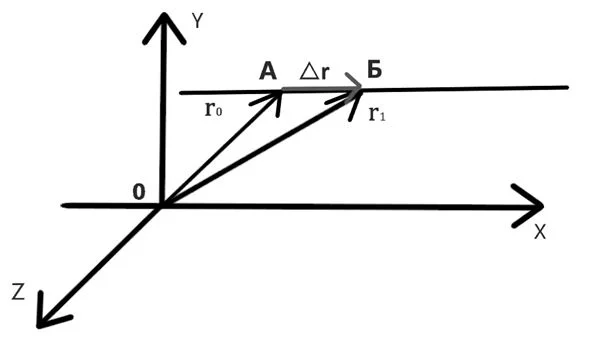
Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:

Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 – r0. Тогда выражение для скорости можно переписать в виде:

Из этого выражения следует:
r1 = r0 + v*t.
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
r = r0 + v*t.
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
В этих выражениях r0x, r0y, r0z и vx, vy, vz – это компоненты изначальных векторов r0 и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х0) и конечной (х1) точки на ось ОХ.

Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
x(t) = x0 + v*t.
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
S(t) = S0 + v*t.
Если точка начала двигаться из начала отсчета S0 = 0, можно переписать эту формулу в виде:
S(t) = v*t.
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:

Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x0 = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
x0 = 3 см = 0,03 м.
Теперь можно записывать уравнение для координаты х:
x(t) = x0 + v*t = 0,03 + 5*t.
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x0 = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный:
x(t) = x0 – v*t = 0,03 – 5*t.
