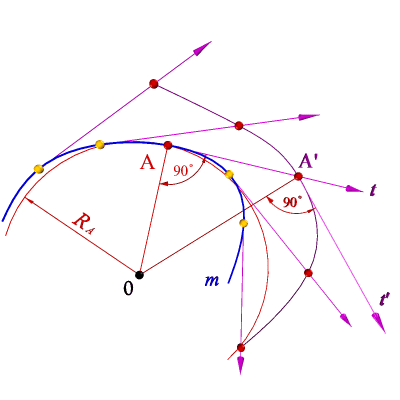
Построение центра и радиуса Кривизны
Определение
центра и радиуса кривизны кривой m
в заданной точке А
выполняется в следующей последовательности:
1. На
кривой по обе стороны от заданной точки
отмечаем несколько точек.
2. Проводим
из всех отмеченных точек полукасательные.
3. На
полукасательных откладываем произвольные,
но равные отрезки и через полученные
точки проводим кривую.
4. Точке
А
заданной кривой соответствует точка
A‘
построенной кривой. Проводим нормали
к кривым в точках A
и A‘.
5. Точка
пересечения нормалей 0
– центр кривизны кривой в точке А,
а RA
− радиус кривизны кривой в этой точке.
Множество
центров кривизны кривой – это линия,
которую называют эволютой
данной кривой. Кривая по отношению к
своей эволюте называется эвольвентой.
Свойства ортогональных проекций кривой
1. Проекцией кривой
линии является кривая линия.
2. Касательная к кривой
линии проецируется в касательную к ее
проекции.
3. Несобственная точка
кривой проецируется в несобственную
точку ее проекции.
4. Порядок линии –
проекции алгебраической кривой равен
порядку самой кривой или меньше.
5. Число узловых точек
(в которых кривая пересекает сама себя)
проекции равно числу узловых точек
самой кривой.
Случаи, когда плоская
кривая проецируется в прямую (свойства
1, 4, 5), а касательная – в точку (свойство 2),
не учитываются.
Рассмотрим
три случая расположения окружности
относительно плоскостей проекции.
Случай 1.
Окружность m лежит
в плоскости || П1.
Проекция окружности на П2 –
отрезок, причем отрезок параллелен
оси П2 / П1.
На
плоскость П1 окружность проецируется
в натуральную величину

Случай 2.
Окружность лежит
в плоскости ![]() П2
П2
и под углом к плоскости П1. Проекция
окружности на П2 –
отрезок. Проекция окружности на П1 –
эллипс. Для уточнения формы эллипса
используем вспомогательные точки и
дугу радиусом данной окружности.

Случай 3.
Окружность лежит
в плоскости общего положения. Обе
проекции окружности –эллипсы.
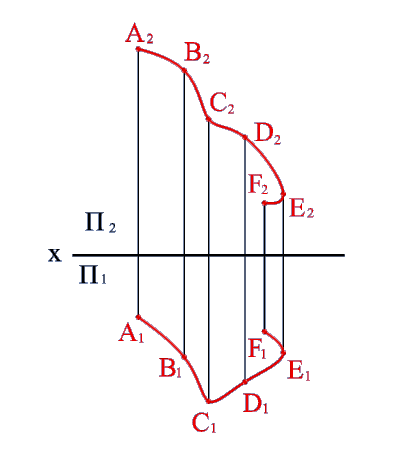
Пространственные кривые линии
Пространственные
кривые линии в начертательной геометрии
обычно рассматриваются как результат
пересечения поверхностей или траектория
движения точки.
Пространственную, так
же как и плоскую, кривую линию на чертеже
задают последовательным рядом точек.
Классическим
примером пространственных кривых линий
являются цилиндрическая и коническая
винтовые линии
Цилиндрическая винтовая линия
Такую линию в пространстве
описывает точка, которая движется по
какой-либо образующей прямого кругового
цилиндра, вращающегося вокруг своей
оси так, что путь, проходимый точкой по
образующей, пропорционален углу поворота
цилиндра
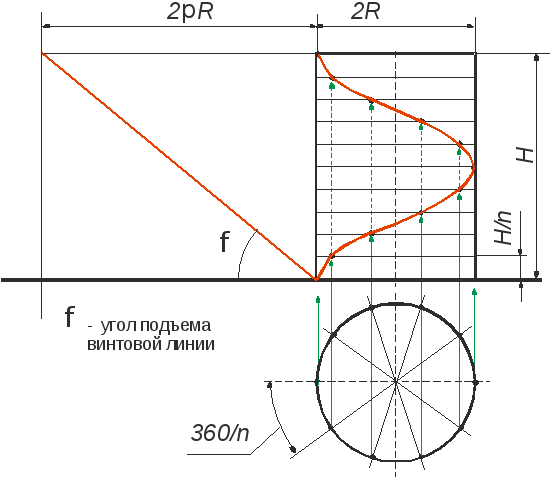
Смещение точки вдоль
образующей за один оборот называется
шагом
цилиндрической винтовой линии. Различают
правую и левую винтовые линии.
Горизонтальная
проекция винтовой линии является
окружностью, а фронтальная – синусоидой.
На развертке цилиндрической поверхности
винтовая линия изобразится в виде
прямой. На рис.4 показан процесс
формообразования винтовой линии.
Угол
![]() называется
называется
углом подъема винтовой линии. Этот угол
равен углу наклона касательной t в любой
точке винтовой линии к плоскости,
перпендикулярной ее оси. Цилиндрическая
винтовая пиния, подобно прямой и
окружности, обладает свойством
сдвигаемости.
Свойство
сдвигаемости
состоит в том, что каждый отрезок линии
может сдвигаться вдоль нее, не подвергаясь
деформации. Это свойство винтовой линии
лежит в основе работы винтовых пар
(винт-гайка). Винтовая линия является
геодезической на цилиндрической
поверхности.
Геодезической
называется
линия, принадлежащая поверхности и
кратчайшая из всех линий, которые можно
провести между двумя точками поверхности.
Кроме цилиндрической винтовой линии,
геодезическими линиями также являются
прямая на плоскости, окружность большого
круга на сфере и др.
Геодезическая
линия изображается на развертке
поверхности в виде прямой линии.

Преподаватель который помогает студентам и школьникам в учёбе.
Кинематический способ определения радиуса кривизны траектории в теоретической механике
Кинематический способ определения радиуса кривизны траектории:
При решении многих технических задач возникает необходимость знать радиус кривизны р (или

Таким образом, если закон движения точки задан уравнениями 
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:

2. Подставив в (б’) выражения  найти
найти 
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение  а затем а?.
а затем а?.
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения

5. Подставив в (г) выражения 
6. Подставить в (в) значения
7. Подставив в (а) найденные значения  получить радиус кривизны р.
получить радиус кривизны р.
Задача:
Движение точки задано уравнениями 
(х, у—в см, t — в сек). Определить радиус кривизны траектории в те моменты, когда она пересекает ось Ох.
Решение.
1. В те моменты, когда траектория пересекает ось Ох, ордината у—0. Поэтому, подставив во второе уравнение движения значение у = 0, получим
Отсюда [решая уравнение относительно 
 находим, что траектория пересекает ось Ох в моменты времени
находим, что траектория пересекает ось Ох в моменты времени
2. Находим выражения проекций скорости:

Как видно, проекция скорости на ось Ох – постоянная величина (не зависит от времени).
3. Определяем значение этих проекций в моменты пересечения траекторией оси Ох:
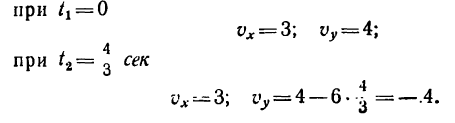
4. Числовое значение скорости точки в моменты пересечения траекторией оси Ох в данном случае одинаковы

5. Находим касательное ускорение точки. Для этого получим общее выражение (уравнение) скорости, воспользовавшись зависимостью (б):
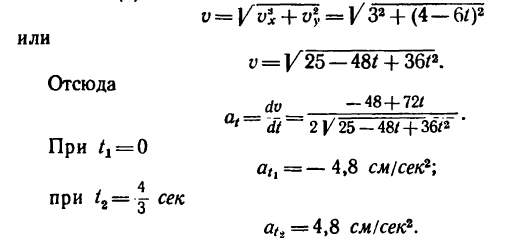
6. Находим проекции полного ускорения точки:

Следовательно, в данном случае полное ускорение точки — постоянная величина. Причем

7. Определяем нормальное ускорение точки. Как при 
так и при 

8. Зная, что в моменты пересечения траекторией оси  5 см:сек и
5 см:сек и  находим радиусы кривизны траектории в этих точках:
находим радиусы кривизны траектории в этих точках:

Решение этой задачи рекомендуется самостоятельно иллюстрировать чертежом, изобразив на нем траекторию точки, векторы скорости  и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы
и ускорения а в местах пересечения траектории с осью Ох (эти векторы легко построить при помощи найденных проекций), а также радиусы 
- Равномерное вращательное движение
- Равнопеременное вращательное движение
- Неравномерное вращательное движение
- Плоскопараллельное движение тела
- Равномерное криволинейное движение точки
- Равнопеременное движение точки
- Неравномерное движение точки по любой траектории
- Определение траектории, скорости и ускорения точки
From Wikipedia, the free encyclopedia
This article is about the general mathematical concept. For its optical applications, see Radius of curvature (optics).

In differential geometry, the radius of curvature (Rc), R, is the reciprocal of the curvature. For a curve, it equals the radius of the circular arc which best approximates the curve at that point. For surfaces, the radius of curvature is the radius of a circle that best fits a normal section or combinations thereof.[1][2][3]
Definition[edit]
In the case of a space curve, the radius of curvature is the length of the curvature vector.
In the case of a plane curve, then R is the absolute value of[3]

where s is the arc length from a fixed point on the curve, φ is the tangential angle and κ is the curvature.
Formula[edit]
In 2D[edit]
If the curve is given in Cartesian coordinates as y(x), i.e., as the graph of a function, then the radius of curvature is (assuming the curve is differentiable up to order 2):

and |z| denotes the absolute value of z.
Also in Classical mechanics branch of Physics Radius of curvature is given by (Net Velocity)²/Acceleration Perpendicular
If the curve is given parametrically by functions x(t) and y(t), then the radius of curvature is

Heuristically, this result can be interpreted as[2]

In n dimensions[edit]
If γ : ℝ → ℝn is a parametrized curve in ℝn then the radius of curvature at each point of the curve, ρ : ℝ → ℝ, is given by[3]
.
As a special case, if f(t) is a function from ℝ to ℝ, then the radius of curvature of its graph, γ(t) = (t, f(t)), is

Derivation[edit]
Let γ be as above, and fix t. We want to find the radius ρ of a parametrized circle which matches γ in its zeroth, first, and second derivatives at t. Clearly the radius will not depend on the position γ(t), only on the velocity γ′(t) and acceleration γ″(t). There are only three independent scalars that can be obtained from two vectors v and w, namely v · v, v · w, and w · w. Thus the radius of curvature must be a function of the three scalars |γ′(t)|2, |γ″(t)|2 and γ′(t) · γ″(t).[3]
The general equation for a parametrized circle in ℝn is

where c ∈ ℝn is the center of the circle (irrelevant since it disappears in the derivatives), a,b ∈ ℝn are perpendicular vectors of length ρ (that is, a · a = b · b = ρ2 and a · b = 0), and h : ℝ → ℝ is an arbitrary function which is twice differentiable at t.
The relevant derivatives of g work out to be

If we now equate these derivatives of g to the corresponding derivatives of γ at t we obtain

These three equations in three unknowns (ρ, h′(t) and h″(t)) can be solved for ρ, giving the formula for the radius of curvature:

or, omitting the parameter t for readability,

Examples[edit]
Semicircles and circles[edit]
For a semi-circle of radius a in the upper half-plane


An ellipse (red) and its evolute (blue). The dots are the vertices of the ellipse, at the points of greatest and least curvature.
For a semi-circle of radius a in the lower half-plane

The circle of radius a has a radius of curvature equal to a.
Ellipses[edit]
In an ellipse with major axis 2a and minor axis 2b, the vertices on the major axis have the smallest radius of curvature of any points, R = b2/a; and the vertices on the minor axis have the largest radius of curvature of any points, R = a2/b.
The ellipse’s radius of curvature, as a function of parameter t

[4]
And as a function of θ

Where e is the eccentricity of the ellipse and is given by:

Applications[edit]
- For the use in differential geometry, see Cesàro equation.
- For the radius of curvature of the earth (approximated by an oblate ellipsoid); see also: arc measurement
- Radius of curvature is also used in a three part equation for bending of beams.
- Radius of curvature (optics)
- Thin films technologies
- Printed electronics
- Minimum railway curve radius
- AFM probe
Stress in semiconductor structures[edit]
Stress in the semiconductor structure involving evaporated thin films usually results from the thermal expansion (thermal stress) during the manufacturing process. Thermal stress occurs because film depositions are usually made above room temperature. Upon cooling from the deposition temperature to room temperature, the difference in the thermal expansion coefficients of the substrate and the film cause thermal stress.[5]
Intrinsic stress results from the microstructure created in the film as atoms are deposited on the substrate. Tensile stress results from microvoids (small holes, considered to be defects) in the thin film, because of the attractive interaction of atoms across the voids.
The stress in thin film semiconductor structures results in the buckling of the wafers. The radius of the curvature of the stressed structure is related to stress tensor in the structure, and can be described by modified Stoney formula.[6] The topography of the stressed structure including radii of curvature can be measured using optical scanner methods. The modern scanner tools have capability to measure full topography of the substrate and to measure both principal radii of curvature, while providing the accuracy of the order of 0.1% for radii of curvature of 90 meters and more.[7]
See also[edit]
- Base curve radius
- Bend radius
- Degree of curvature (civil engineering)
- Osculating circle
- Track transition curve
References[edit]
- ^ Weisstien, Eric. “Radius of Curvature”. Wolfram Mathworld. Retrieved 15 August 2016.
- ^ a b Kishan, Hari (2007). Differential Calculus. Atlantic Publishers & Dist. ISBN 9788126908202.
- ^ a b c d Love, Clyde E.; Rainville, Earl D. (1962). Differential and Integral Calculus (Sixth ed.). New York: MacMillan.
- ^ Weisstein, Eric W. “Ellipse”. mathworld.wolfram.com. Retrieved 2022-02-23.
- ^ “Controlling Stress in Thin Films”. Flipchips.com. Retrieved 2016-04-22.
- ^ “On the determination of film stress from substrate bending : Stoney’s formula and its limits” (PDF). Qucosa.de. Retrieved 2016-04-22.
- ^ Peter Walecki. “Model X”. Zebraoptical.com. Retrieved 2016-04-22.
Further reading[edit]
- do Carmo, Manfredo (1976). Differential Geometry of Curves and Surfaces. ISBN 0-13-212589-7.
External links[edit]
- The Geometry Center: Principal Curvatures
- 15.3 Curvature and Radius of Curvature
- Weisstein, Eric W. “Principal Curvatures”. MathWorld.
- Weisstein, Eric W. “Principal Radius of Curvature”. MathWorld.
Полезно знать математический способ, позволяющий рассчитать радиус дуги. Он особенно удобен, когда требуется точно разметить плавную дугу с помощью большого импровизированного циркуля, а не гибкого лекала, после того как вам стали известны три опорные точки или два главных размера.
 Как видно на рисунке справа, требуется знать лишь высоту и длину дуги. Подставьте эти размеры в простую формулу и вычислите радиус. Получив результат, настройте циркуль на этот размер и начертите идеальную дугу требуемого радиуса.
Как видно на рисунке справа, требуется знать лишь высоту и длину дуги. Подставьте эти размеры в простую формулу и вычислите радиус. Получив результат, настройте циркуль на этот размер и начертите идеальную дугу требуемого радиуса.
Например, если нужно построить дугу длиной 240 и высотой 30 мм, следует действовать так:
Сначала подставьте эти размеры в формулу. В нашем случае L=120, Н=30, поэтому (1202+302): (2×30) = (14400+900): 60= 153000:60 = 255.
Теперь сделайте для этого радиуса циркуль, как показано на фото внизу. Выровняйте один конец с серединой дуги на заготовке. Проведите из этой точки под прямым углом по линейке прямую линию и поставьте на нее второй конец циркуля. Теперь вы можете начертить идеальную дугу, которая соединит все три опорные точки.

Простая формула для определения радиуса дуги, 2.5 out of 5 based on 22 ratings
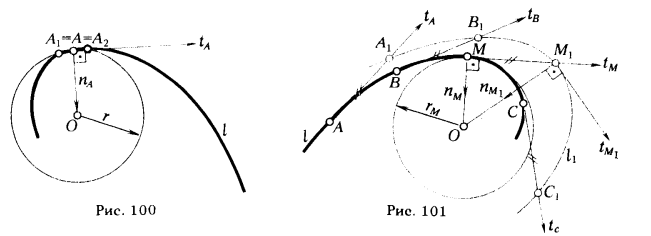
Величина угла α° между полукасательными в двух бесконечно близких точках, отнесенная к длине дуги s, заключенной между этими точками, характеризует степень искривленности кривой линии. Чем больше угол α°, тем большую кривизну имеет линия. Обозначив кривизну k,
можно записать k = lim Δα°/Δs (при Δs → 0), т. е. кривизна – предел отношения угла между полукасательными к соответствующей дуге.
В общем случае кривизна в каждой точке плоской кривой будет различней (исключение составляют только окружность и прямая, для которых кривизна в любой их точке постоянна; для прямой она равна нулю). Графически определить величину кривизны в данной точке кривой можно с помощью окружности (круга) кривизны.
Окружностью кривизны в данной точке А кривой l называют предельное положение окружности, проведенной через точку А и две другие бесконечно близкие ей точки А1 и А2, также принадлежащие кривой l (рис. 100). Радиус такой окружности r называют радиусом кривизны, а ее центр О – центром кривизны. Чем меньше величина радиуса кривизны, тем больше искривлена линия. Поэтому количественная характеристика кривизны определяется величиной, обратной радиусу кривизны k = l/r.