В статье о n-мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n-мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n-векторов. Размерность его соответственно равна n. Возьмем систему из n-единичных векторов:
e(1)=(1, 0,…,0)e(2)=(0, 1,…,0)e(n)=(0, 0,…,1)
Используем эти векторы в качестве составляющих матрицы A: она будет являться единичной с размерностью n на n. Ранг этой матрицы равен n. Следовательно, векторная система e(1), e(2),…, e(n) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n, то размерность пространства n-мерных векторов равна n, а единичные векторы e(1), e(2),…, e(n) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n-мерных векторов, в которой число векторов меньше n, не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e(2), e(1),…, e(n). Она также будет являться базисом n-мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n. Система e(2), e(1),…, e(n) линейно независима и является базисом n-мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n-мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n-мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a=(3, -2, 1)b=(2, 1, 2)c=(3, -1, -2)
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A=323-21-112-2A=3-212123-1-2=3·1·(-2)+(-2)·2·3+1·2·(-1)-1·1·3-(-2)·2·(-2)-3·2·(-1)==-25≠0⇒Rank(A)=3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a=(3, -2, 1)b=(2, 1, 2)c=(3, -1, -2)d=(0, 1, 2)
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a=(3, -2, 1), b=(2, 1, 2), c=(3, -1, -2) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a=(1, 2, 3, 3)b=(2, 5, 6, 8)c=(1, 3, 2, 4)d=(2, 5, 4, 7)
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A=1233256813242547
По методу Гаусса определим ранг матрицы:
A=1233256813242547~1233010201-1101-21~~1233010200-1-100-2-1~1233010200-1-10001⇒⇒Rank(A)=4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a(1)=(1, 2, -1, -2)a(2)=(0, 2, 1, -3)a(3)=(1, 0, 0, 5)
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e(1), e(2),…, e(n) являются базисом векторного n-мерного пространства. Добавим к ним некий n-мерный вектор x→: полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n-мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n-мерного векторного пространства – e(1), e(2),…, e(n). Сделаем систему линейно зависимой, добавив к ней n-мерный вектор x→. Этот вектор может быть линейно выражен через исходные векторы e:
x=x1·e(1)+x2·e(2)+…+xn·e(n) , где x1, x2,…, xn – некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
x=x~1e(1)+x2~e(2)+…+x~ne(n), где x~1, x~2,…, x~n – некие числа.
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x=x1·e(1)+x2·e(2)+…+xn·e(n) . Получим:
0=(x~1-x1)·e(1)+(x~2-x2)·e(2)+…(x~n-xn)·e(2)
Система базисных векторов e(1), e(2),…, e(n) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты (x~1-x1), (x~2-x2),…, (x~n-xn) будут равны нулю. Из чего справедливым будет: x1=x~1, x2=x~2,…, xn=x~n. И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x1, x2,…, xn называются координатами вектора x→ в базисе e(1), e(2),…, e(n).
Доказанная теория делает понятным выражение «задан n-мерный вектор x=(x1, x2,…, xn)»: рассматривается вектор x→ n-мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n-мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n-мерного векторного пространства задана система из n линейно независимых векторов
e(1)=(e1(1), e2(1),…, en(1))e(2)=(e1(2), e2(2),…, en(2))⋮e(n)=(e1(n), e2(n),…, en(n))
а также задан вектор x=(x1, x2,…, xn).
Векторы e1(1), e2(2),…, en(n) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x→ в базисе e1(1), e2(2),…, en(n), обозначаемые как x~1, x~2,…, x~n.
Вектор x→ будет представлен следующим образом:
x=x~1·e(1)+x~2·e(2)+…+x~n·e(n)
Запишем это выражение в координатной форме:
(x1, x2,…, xn)=x~1·(e(1)1, e(1)2,…, e(1)n)+x~2·(e(2)1, e(2)2,…, e(2)n)+…++x~n·(e(n)1, e(n)2,…, e(n)n)==(x~1e1(1)+x~2e1(2)+…+x~ne1(n), x~1e2(1)+x~2e2(2)++…+x~ne2(n), …, x~1en(1)+x~2en(2)+…+x~nen(n))
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x~1, x~2,…, x~n:
x1=x~1e11+x~2e12+…+x~ne1nx2=x~1e21+x~2e22+…+x~ne2n⋮xn=x~1en1+x~2en2+…+x~nenn
Матрица этой системы будет иметь следующий вид:
e1(1)e1(2)⋯e1(n)e2(1)e2(2)⋯e2(n)⋮⋮⋮⋮en(1)en(2)⋯en(n)
Пусть это будет матрица A, и ее столбцы – векторы линейно независимой системы векторов e1(1), e2(2),…, en(n). Ранг матрицы – n, и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x~1, x~2,…, x~n вектора x→ в базисе e1(1), e2(2),…, en(n).
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e(1)=(1,-1,1)e(2)=(3, 2, -5)e(3)=(2, 1, -3)x=(6, 2, -7)
Необходимо подтвердить факт, что система векторов e(1), e(2), e(3) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e(1), e(2), e(3) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A, строки которой – заданные векторы e(1), e(2), e(3).
Используем метод Гаусса:
A=1-1132-521-3~1-1105-803-5~1-1105-800-15
Rank (A) = 3. Таким образом, система векторов e(1), e(2), e(3) линейно независима и является базисом.
Пусть в базисе вектор x→ имеет координаты x~1, x~2, x~3. Связь этих координат определяется уравнением:
x1=x~1e1(1)+x~2e1(2)+x~3e1(3)x2=x~1e2(1)+x~2e2(2)+x~3e2(3)x3=x~1e3(1)+x~2e3(2)+x~3e3(3)
Применим значения согласно условиям задачи:
x~1+3x~2+2x~3=6-x~1+2x~2+x~3=2x~1-5x~2-3×3=-7
Решим систему уравнений методом Крамера:
∆=132-1211-5-3=-1∆x~1=632221-7-5-3=-1, x~1=∆x~1∆=-1-1=1∆x~2=162-1211-7-3=-1, x~2=∆x~2∆=-1-1=1∆x~3=136-1221-5-7=-1, x~3=∆x~3∆=-1-1=1
Так, вектор x→ в базисе e(1), e(2), e(3) имеет координаты x~1=1, x~2=1, x~3=1.
Ответ: x=(1,1,1)
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c(1)=(c1(1), c2(1),…, cn(1))c(2)=(c1(2), c2(2),…, cn(2))⋮c(n)=(c1(n), e2(n),…, cn(n))
И
e(1)=(e1(1), e2(1),…, en(1))e(2)=(e1(2), e2(2),…, en(2))⋮e(n)=(e1(n), e2(n),…, en(n))
Указанные системы являются также базисами заданного пространства.
Пусть c~1(1), c~2(1),…, c~n(1) – координаты вектора c(1) в базисе e(1), e(2),…, e(3), тогда связь координат будет задаваться системой линейных уравнений:
с1(1)=c~1(1)e1(1)+c~2(1)e1(2)+…+c~n(1)e1(n)с2(1)=c~1(1)e2(1)+c~2(1)e2(2)+…+c~n(1)e2(n)⋮ сn(1)=c~1(1)en(1)+c~2(1)en(2)+…+c~n(1)en(n)
В виде матрицы систему можно отобразить так:
(c1(1), c2(1),…, cn(1))=(c~1(1), c~2(1),…, c~n(1))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
Сделаем по аналогии такую же запись для вектора c(2):
(c1(2), c2(2),…, cn(2))=(c~1(2), c~2(2),…, c~n(2))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
И, далее действуя по тому же принципу, получаем:
(c1(n), c2(n),…, cn(n))=(c~1(n), c~2(n),…, c~n(n))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
Матричные равенства объединим в одно выражение:
c1(1)c2(1)⋯cn(1)c1(2)c2(2)⋯cn(2)⋮⋮⋮⋮c1(n)c2(n)⋯cn(n)=c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)·e1(1)e2(1)⋯en(1)e1(2)e2(2)⋯en(2)⋮⋮⋮⋮e1(n)e2(n)⋯en(n)
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e(1), e(2),…, e(3) через базис c(1), c(2),…, c(n):
e1(1)e2(1)⋯en(1)e1(2)e2(2)⋯en(2)⋮⋮⋮⋮e1(n)e2(n)⋯en(n)=e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)·c1(1)c2(1)⋯cn(1)c1(2)c2(2)⋯cn(2)⋮⋮⋮⋮c1(n)c2(n)⋯cn(n)
Дадим следующие определения:
Матрица c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n) является матрицей перехода от базиса e(1), e(2),…, e(3)
к базису c(1), c(2),…, c(n).
Матрица e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n) является матрицей перехода от базиса c(1), c(2),…, c(n)
к базису e(1), e(2),…, e(3).
Из этих равенств очевидно, что
c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)·e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)=10⋯001⋯0⋮⋮⋮⋮00⋯1e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)·c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)=10⋯001⋯0⋮⋮⋮⋮00⋯1
т.е. матрицы перехода взаимообратны.
Рассмотрим теорию на конкретном примере.
Исходные данные: необходимо найти матрицу перехода от базиса
c(1)=(1, 2, 1)c(2)=(2, 3, 3)c(3)=(3, 7, 1)
к базису
e(1)=(3, 1, 4)e(2)=(5, 2, 1)e(3)=(1, 1, -6)
Также нужно указать связь координат произвольного вектора x→ в заданных базисах.
Решение
1. Пусть T – матрица перехода, тогда верным будет равенство:
314521111=T·121233371
Умножим обе части равенства на
121233371-1
и получим:
T=31452111-6·121233371-1
2. Определим матрицу перехода:
T=31452111-6·121233371-1==31452111-6·-18537-2-15-1-1=-2794-712012-4198
3. Определим связь координат вектора x→:
допустим, что в базисе c(1), c(2),…, c(n) вектор x→ имеет координаты x1,x2,x3, тогда:
x=(x1,x2,x3)·121233371,
а в базисе e(1), e(2),…, e(3) имеет координаты x~1,x~2,x~3, тогда:
x=(x~1,x~2,x~3)·31452111-6
Т.к. равны левые части этих равенств, мы можем приравнять и правые:
(x1,x2,x3)·121233371=(x~1,x~2,x~3)·31452111-6
Умножим обе части справа на
121233371-1
и получим:
(x1,x2,x3)=(x~1,x~2,x~3)·31452111-6·121233371-1⇔⇔(x1,x2,x3)=(x~1,x~2,x~3)·T⇔⇔(x1,x2,x3)=(x~1,x~2,x~3)·-2794-712012-4198
С другой стороны
(x~1,x~2,x~3)=(x1,x2,x3)·-2794-712012-4198
Последние равенства показывают связь координат вектора x→ в обоих базисах.
Ответ: матрица перехода
-2794-712012-4198
Координаты вектора x→ в заданных базисах связаны соотношением:
(x1,x2,x3)=(x~1,x~2,x~3)·-2794-712012-4198
или
(x~1,x~2,x~3)=(x1,x2,x3)·-2794-712012-4198-1

оксана николаевна кузнецова
Эксперт по предмету «Математика»
Задать вопрос автору статьи
Вектор в произвольном линейном пространстве — это некоторый элемент этого пространства.
Замечание 1
Базисом трёхмерного пространства называют некоторые линейно независимые вектора $a, b$ и $c$, если любой вектор $d$ может быть выражен в виде линейной комбинации этих векторов, то есть существуют некоторые вещественные коэффициенты $λ, μ$ и $ν$, причём такие, что будет соблюдаться условие $d= λ cdot a + μcdot b + ν cdot c left( 1 right)$.
Числа $λ, μ$ и $ν$ называются координатами рассматриваемого вектора относительно некоторого базиса $a, b$ и $c$.
В контексте плоскости базисом будет два независимых вектора, лежащих в этой плоскости, а не три, как в объёмном мире.
Любой вектор $d$ имеет лишь единственное разложение по базису векторов, то есть его координаты задаются однозначно через используемый базис.
Определение 1
Аффинными координатами некоторой точки $M$ в пространстве называются координаты точки относительно базиса пространства $a, b$ и $c$ и некоторой точки $O$, которую принимают за начало координат.
Декартова система координат является примером аффиной системы координат, причём базисные вектора в ней принято обозначать не буквами $a, b$ и $c$, а $i, j$ и $k$, представляющими собой направленные ортогональные между собой отрезки, причём длина каждого равна единице.
Для декартовой системы координат формула разложения выглядит так:
$d = X cdot vec{i} + Y cdot vec{j} + Z cdot vec{k}$
Здесь $X, Y$ и $Z$ — координаты вектора, а $ i, j$ и $k$ — базис.
Через базис декартовой системы координат выражается скалярное произведение векторов, заданных в этом пространстве. Для этого их координаты записываются через специальную матрицу.
Пример 1
Докажите, что вектора, $a_1…a_4$, перечисленные ниже, являются базисом пространства $mathbb{R^4}$.
$a_1 = (1; 2; -1: -2)$;
$a_2 = (2; 3 0; -1)$;
$a_3 = (1; 2; 1; 4)$;
$a_4 = (1; 3; -1; 0)$
Решение:
Размерность данного пространства равна 4, а это значит, что для проверки того, являются ли эти вектора базисом, нужно доказать их линейную независимость, то есть доказать, что ранг матрицы, составленной из координат этих векторов как из строчек, равен количеству строк.
Составленная матрица имеет вид:
$A = begin{pmatrix} 1 & 2 & -1 & -2 \ 2 & 3 & 0 & -1 \ 1 & 2 & 1 & 4 \ 1 & 3 & -1 & 0 \ end{pmatrix}$
Преобразуем её к треугольной, для краткости описания выполняемых операций строчки будем записывать (n), здесь $n$ — номер строчки.
1) (4) – (1); (3) – (1); (2) – (1) $cdot 2$:
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 1 & 0 & 2 \ end{pmatrix}$
2) (4) + (2):
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 0 & 2 & 5 \ end{pmatrix}$
3) (4) – (3):
$begin{pmatrix} 1 & 2 & -1 & -2 \ 0 & -1 & 2 & 3 \ 0 & 0 & 2 & 6 \ 0 & 0 & 0 & -1 \ end{pmatrix}$
Приведённая матрица имеет ранг 4, а значит данные вектора образуют базис этого пространства.
«Разложение вектора по базису векторов: формулировка с примерами решения» 👇
Пример 2
Пусть вектор $vec{k}$ можно разложить с использованием базиса $vec{a}$ и $vec{b}$ по формуле
$vec{k}= 5cdot vec{a} – 3 cdot vec{b}$. Каковы его координаты в соответствии с этим базисом?
Решение:
$vec{a}$ и $vec{b}$ — единичные вектора данного двумерного пространства, а это значит, что коэффициенты при них в заданном равенстве и являются координатами в этом базисе:
$vec{k} = (5; – 3)_{{a; b}}$.
Пример 3
Дан базис из трёх векторов $(1; 1; 3), ( -3; 4; 9), (2; -2; 4)$ и вектор $vec{k}=(8; -9; 6)$. Разложите данный вектор по заданному базису.
Решение:
Воспользуемся формулировкой разложения $(1)$:
$k_1 cdot (1; 1; 3) + k_2 cdot ( -3; 4; 9) + k_3 cdot (2; -2; 4) = (8; -9; 6)$;
Для того чтобы узнать координаты в данном базисе, составим расширенную матрицу, действия со строчками будем записывать как в предыдущем примере:
$begin{array}{ccc|c} 1 & -3 & 2 & 8 \ -1 & 4 & -2 & -9 \ 3 & 9 & 4 & 6 \ end{array}$
1) (2) – (1); (3) – (1) $cdot 3$:
$begin{array}{ccc|c} 1 & -3 & 2 & 8 \ 0 & 1 & 0 & -1 \ 0 & 18 & -2 & -18 \ end{array}$;
2) (1) + (2) $cdot 3$; (3) – (2) $cdot 18$:
$begin{array}{ccc|c} 1 & 0 & 2 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & -2 & 0 \ end{array}$;
3) (3) : (-2):
$begin{array}{ccc|c} 1 & 0 & 2 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & 1 & 0 \ end{array}$;
4) (1) – (3) $cdot 2$:
$begin{array}{ccc|c} 1 & 0 & 0 & 5 \ 0 & 1 & 0 & -1 \ 0 & 0 & 1 & 0 \ end{array}$;
Координатами вектора $vec{k}$ в заданном базисе будут $(5; – 1; 0)$.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
В данной публикации мы рассмотрим, каким образом можно разложить вектор по двум базисным векторам, а также разберем пример решения задачи по этой теме.
- Принцип разложения вектора
- Пример задачи
Принцип разложения вектора
Для того, чтобы разложить вектор b по базисным векторам a1, …, an, требуется определить такие коэффициенты x1, …, xn, при которых линейная комбинация векторов a1, …, an равняется вектору b, то есть:
x1a1 + … + xnan = b
где x1, …, xn – координаты вектора b в базисе a1, …, an
Пример задачи
Разложим вектор b = {16; 1} по двум базисным векторам m = {2; 1} и n = {1; -3}.
Решение:
1. Векторное уравнение выглядит так:
xm + yn = b
2. Представим его в виде системы линейных уравнений:
![]()
3. Теперь нужно решить систему. Из второго уравнения получаем:
x = 1 + 3y.
Подставляем полученное выражение в первое уравнение:
2 · (1 + 3y) + y = 16
2 + 6y + y = 16
7y = 14
y = 2
Следовательно, x = 1 + 3y = 1 + 2 · 2 = 7.
Ответ: b = 7m + 2n.
Разложение вектора по базису
Вектор
вида
![]() ,
,
где
![]()
(![]() )
)
– некоторые числа, называется линейной
комбинацией
данных
векторов
![]() .
.
![]() –
–
коэффициенты линейной комбинации.
Если вектор
представлен как линейная комбинация
некоторых векторов, то говорят, что он
разложен
по этим
векторам.
Справедливы
следующие теоремы
Т
е о р е м а 1. Пусть даны два неколлинеарных
вектора
![]() и
и![]() .
.
Любой компланарный с ними вектор![]() раскладывается по ним и такое разложение
раскладывается по ним и такое разложение
единственно. Т. е.,![]() =
=![]() +
+![]() ,
,
где![]() и
и![]() единственные для этого вектора
единственные для этого вектора![]() вполне определенные числа.
вполне определенные числа.
Т
е о р е м а 2. Пусть даны три некомпланарных
вектора
![]() ,
,![]() и
и![]() .
.
Любой вектор![]() раскладывается по ним и такое разложение
раскладывается по ним и такое разложение
единственно. Т. е.,![]() =
=![]() +
+![]() +
+![]() .
.
Базисом
в пространстве
называются три некомпланарных вектора,
взятых в определенном порядке. Базис
позволяет однозначно сопоставить
вектору упорядоченную тройку чисел
![]() ,
,![]() ,
,![]() –
–
коэффициентов разложения этого вектора
по векторам базиса. С другой стороны,
каждой упорядоченной тройке чисел при
помощи базиса сопоставляется единственный
вектор. Если![]() ,
,![]() ,
,![]() – базис и
– базис и![]() =
=![]() +
+![]() +
+![]() ,
,
то числа![]() ,
,![]() ,
,![]() называютсякоординатами
называютсякоординатами
вектора
![]() в данном базисе, при этом пишут
в данном базисе, при этом пишут![]() . Аналогично
. Аналогично
дается определение базиса на плоскости,
когда вектор имеет две координаты![]() .
.
Действия
над векторами, заданными своими
координатами:
1.При
умножении вектора на число все его
координаты умножаются
на
это число. Т.е.,
![]() (
(![]() +
+![]() +
+![]() )=
)=![]() +
+![]() +
+![]() и
и![]() {
{![]() ,
,![]() ,
,![]() }.
}.
2.
При сложении векторов складываются их
соответствующие координаты. Т. е., если
в выбранном базисе
![]() ,
,![]() ,
,
то![]() .
.
Аффинные координаты
 Аффинные
Аффинные
координаты
в пространстве
определяются (рис. 4) заданием базиса
![]() ,
,![]() ,
,![]() и точкиО –
и точкиО –
начала координат (affinis
– смежный,
соседний).
Рис. 4
Прямые,
проходящие через начало координат в
направлении базисных векторов, называются
осями
координат:
первая –
ось абсцисс;
вторая – ось
ординат;
третья – ось
аппликат.
Плоскости, проходящие через оси координат
– координатные
плоскости.
Пусть
в пространстве задана точка М.
![]() –радиус-вектор
–радиус-вектор
точки М.
Тогда разложение по векторам базиса
![]() =
=![]() +
+![]() +
+![]() .Аффинными
.Аффинными
координатами
точки М
называются координаты – радиус-вектора
![]() в
в
рассматриваемой системе координат,
пишут
![]() ,
,
где![]() – абсцисса,
– абсцисса,![]() – ордината,
– ордината,![]() – аппликата точкиМ.
– аппликата точкиМ.
В заданной
аффинной системе координат координаты
фиксированной точки определяются
однозначно.
С другой стороны, если задана система
координат, то в ней каждой упорядоченной
тройке чисел
ставится в соответствие единственная
точка.
Аффинная система координат на плоскости
![]() определяет такое же соответствие между
определяет такое же соответствие между
точками и упорядоченными парами чисел.
 З
З
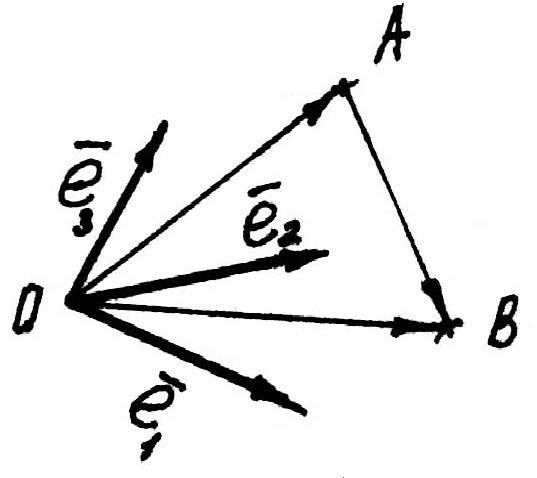
а д а ч а. Пусть в заданной аффинной
системе![]() и
и![]() .
.
Требуется найти координаты вектора![]() .
.
Рис.
5
Р
е ш е н и е . Из чертежа (рис. 5) видно
![]() ,
,
тогда
![]()
![]() +
+![]() +
+![]()
![]() +
+![]() +
+![]() =
=
=![]() .
.
Таким
образом,
![]() ,
,
то есть, координаты вектора равны
разности соответствующих координат
конца и начала вектора.
Проекция вектора на ось
 Ориентированной
Ориентированной
осью
называется
прямая, на которой закреплена точка –
начало отсчета, выбрана единица длины
и направление отсчета.
Рис. 6
Проекцией
вектора
![]() на ось
на ось![]()
![]() называется величина, численно равная
называется величина, численно равная
длине отрезка![]() между основаниями перпендикуляров,
между основаниями перпендикуляров,
опущенных из точекА
и В
на l.
Эта длина берется со знаком плюс,
если направление от
![]() к
к![]() совпадает с направлением осиl
совпадает с направлением осиl
и минус
в противном
случае (рис. 6). Аналогично определяется
проекция одного вектора на другой.
Углом
между осью и вектором
называется угол,
![]() на который
на который
нужно повернуть ось до совмещения с
вектором кратчайшим образом (так чтобы
их стрелки совпали). Из такого определения
следует, что
![]() .
.
Свойства
проекции вектора на ось.
1.
Проекция
равна нулю тогда и только тогда, когда
вектор перпендикулярен оси (говорят,
вектор ортогонален
оси).
2.
При параллельном переносе вектора его
проекция не меняется.
3.
Проекция вектора на ось равна произведению
длины вектора на
косинус
угла между вектором и осью.
![]()
 .
.
Рис.
7 Рис. 8
В
этой формуле знак проекции регулируется
знаком косинуса:
–
если
![]() острый угол (рис. 7), то
острый угол (рис. 7), то![]() и
и![]() ;
;
–
если
![]() тупой угол (рис. 8), то
тупой угол (рис. 8), то![]() и
и![]() .
.
4. Скалярный
множитель можно выносить за знак проекции
![]() .
.
5.
Проекция суммы векторов равна сумме
проекций слагаемых
![]() .
.
Соседние файлы в папке Лекции. Математика
- #
- #
- #
- #
- #
- #
- #
§ 22.Разложение вектора по базису
22.1. Компланарные векторы
Определение. Ненулевые векторы  ,
,  ,
,  называются компланарными, если изображающие их направленные отрезки лежат в одной плоскости или параллельны одной и той же плоскости (рис. 180, а).
называются компланарными, если изображающие их направленные отрезки лежат в одной плоскости или параллельны одной и той же плоскости (рис. 180, а).
Понятие компланарности определяется для произвольной совокупности векторов. Так, любой вектор компланарен некоторой плоскости. Два любых вектора также компланарны некоторой плоскости. Но три любых вектора считаются компланарными некоторой плоскости, если направленные отрезки, изображающие эти векторы, будучи отложенными от одной точки, лежат в одной плоскости. Аналогично определяется компланарность для четырёх, пяти и т. д. произвольной совокупности векторов.
На рисунке 180, б векторы  ,
,  ,
,  компланарны, так как отрезок B1D1 параллелен плоскости ABD, но тройка векторов
компланарны, так как отрезок B1D1 параллелен плоскости ABD, но тройка векторов  ,
,  и
и  не является компланарной, так как отрезок AA1 не параллелен плоскости ABD, в которой расположены отрезки AB и AD. Некомпланарны и тройки векторов
не является компланарной, так как отрезок AA1 не параллелен плоскости ABD, в которой расположены отрезки AB и AD. Некомпланарны и тройки векторов  ,
,  ,
,  и
и  ,
,  ,
,  . (Почему?)
. (Почему?)
Укажите тройки компланарных и некомпланарных векторов, изображённых на рисунке 180, б, в.
Замечание. Если среди трёх векторов хотя бы два коллинеарны, то эти три вектора компланарны.

Рис. 180

Рис. 181
В самом деле, пусть среди трёх векторов  =
=  ,
,  =
=  ,
,  =
=  коллинеарны векторы
коллинеарны векторы  и
и  , т. е.
, т. е.  = x
= x . Проведём плоскость α, параллельную непараллельным прямым AB и CD (рис. 181). Тогда MN ‖ α (почему?). От произвольной точки O плоскости α отложим направленные отрезки
. Проведём плоскость α, параллельную непараллельным прямым AB и CD (рис. 181). Тогда MN ‖ α (почему?). От произвольной точки O плоскости α отложим направленные отрезки  =
=  ,
,  =
=  ,
,  =
=  .
.
Эти отрезки лежат в плоскости α (почему?). Следовательно, векторы  ,
,  и
и  компланарны. Три вектора, среди которых имеется нулевой вектор, считаются также компланарными.
компланарны. Три вектора, среди которых имеется нулевой вектор, считаются также компланарными.
22.2. Разложение вектора на плоскости
 Пусть на плоскости α даны неколлинеарные векторы
Пусть на плоскости α даны неколлинеарные векторы  и
и  ;
;  — произвольный вектор этой плоскости.
— произвольный вектор этой плоскости.
Если вектор  коллинеарен с одним из векторов
коллинеарен с одним из векторов  и
и  , то или
, то или  = x•
= x• + 0•
+ 0• (
( ‖
‖  ), или
), или  = 0•
= 0• + y•
+ y• (
( ‖
‖  ).
).
Заметим, что  = 0•
= 0• + 0•
+ 0• .
.
Пусть теперь вектор  =
=  не коллинеарен ни с одним из векторов
не коллинеарен ни с одним из векторов  и
и  (рис. 182). Через точку С проведём прямые a1 ‖ a и b1 ‖ b, при этом получим точки A1 = a ∩ b1 и B1 = b ∩ a1. Тогда по правилу параллелограмма пишем:
(рис. 182). Через точку С проведём прямые a1 ‖ a и b1 ‖ b, при этом получим точки A1 = a ∩ b1 и B1 = b ∩ a1. Тогда по правилу параллелограмма пишем:

Рис. 182
 =
=  +
+  = x
= x + y
+ y = x
= x + y
+ y или
или
 = x
= x + y
+ y .(1)
.(1)
Равенство  = x
= x + y
+ y называется разложением вектора
называется разложением вектора  по двум неколлинеарным векторам
по двум неколлинеарным векторам  и
и  ; числа x и y называются коэффициентами разложения.
; числа x и y называются коэффициентами разложения.
Покажем, что числа x и y в разложении (1) однозначно определены. Действительно, предположим, что существуют другие числа x1 и y1 такие, что, по крайней мере, или x1 ≠ x, или y1 ≠ y и при этом верно равенство
 = x1
= x1 + y1
+ y1 .(2)
.(2)
Из равенств (1) и (2) получаем x + y
+ y = x1
= x1 + y1
+ y1 или (x1 – x)
или (x1 – x)  + (y1 – y)
+ (y1 – y)  = 0, откуда следует, что либо векторы
= 0, откуда следует, что либо векторы  и
и  коллинеарны (что противоречит условию), либо y1 = y и x1 = x. Таким образом, нами доказана теорема.
коллинеарны (что противоречит условию), либо y1 = y и x1 = x. Таким образом, нами доказана теорема.
 Теорема 34. Если на плоскости дана упорядоченная пара (
Теорема 34. Если на плоскости дана упорядоченная пара ( ;
;  ) неколлинеарных векторов, то для любого вектора
) неколлинеарных векторов, то для любого вектора  этой плоскости существует единственная упорядоченная пара чисел (x; y) такая, что выполняется векторное равенство
этой плоскости существует единственная упорядоченная пара чисел (x; y) такая, что выполняется векторное равенство
 = x
= x + y
+ y .
.
Из равенства (1) следует, что любой вектор  , компланарный с неколлинеарными векторами
, компланарный с неколлинеарными векторами  и
и  , является линейной комбинацией векторов
, является линейной комбинацией векторов  и
и  . Поэтому пару векторов
. Поэтому пару векторов  и
и  называют базисом на плоскости, а также базисом на множестве всех векторов пространства, компланарных с векторами
называют базисом на плоскости, а также базисом на множестве всех векторов пространства, компланарных с векторами  и
и  .
.
Определение. Базисом на плоскости называется любая упорядоченная пара неколлинеарных векторов  и
и  . Векторы
. Векторы  и
и  называются базисными векторами.
называются базисными векторами.
Базис из векторов  и
и  обозначают (
обозначают ( ;
;  ). При этом равенство
). При этом равенство  = x
= x + y
+ y называется разложением вектора
называется разложением вектора  по базису (
по базису ( ;
;  ) (или разложением вектора
) (или разложением вектора  по базисным векторам
по базисным векторам  и
и  ), а числа x и y — координатами вектора
), а числа x и y — координатами вектора  в базисе (
в базисе ( ;
;  ).
).
Если вектор  компланарен с неколлинеарными векторами
компланарен с неколлинеарными векторами  и
и  , то выполняется равенство
, то выполняется равенство  = x
= x + y
+ y .
.
Справедливо и обратное утверждение: если для векторов  ,
,  и
и  выполняется равенство
выполняется равенство  = x
= x + y
+ y , то векторы
, то векторы  ,
,  и
и  компланарны.
компланарны.
(Докажите его самостоятельно.)
Таким образом: три вектора  ,
,  и
и  (где
(где  и
и  неколлинеарные векторы) пространства компланарны, если существуют числа x и y такие, что выполняется равенство
неколлинеарные векторы) пространства компланарны, если существуют числа x и y такие, что выполняется равенство
 = x
= x + y
+ y .
.
Признак компланарности трёх векторов можно сформулировать следующим образом.
 Теорема 35 (признак компланарности трёх векторов). Три вектора
Теорема 35 (признак компланарности трёх векторов). Три вектора  ,
,  и
и  пространства компланарны тогда и только тогда, когда существуют такие числа x, y, z, из которых хотя бы одно отлично от нуля, что выполняется равенство
пространства компланарны тогда и только тогда, когда существуют такие числа x, y, z, из которых хотя бы одно отлично от нуля, что выполняется равенство
x + y
+ y + z
+ z =
=  .
.

Рис. 183
Докажите это утверждение самостоятельно.
Напомним одно важное векторное равенство на плоскости. Пусть точка O не лежит на прямой AB. Тогда точка M лежит на прямой AB тогда и только тогда, когда  = x•
= x• + y•
+ y• при x + y = 1 (рис. 183).
при x + y = 1 (рис. 183).
22.3. Разложение вектора по трём некомпланарным векторам
Определение. Три вектора называются некомпланарными, если изображающие их направленные отрезки не лежат в одной плоскости и не параллельны одной плоскости.
 Теорема 36. Если дана упорядоченная тройка (
Теорема 36. Если дана упорядоченная тройка ( ;
;  ;
;  ) некомпланарных векторов, то для любого вектора
) некомпланарных векторов, то для любого вектора  пространства существует единственная упорядоченная тройка чисел (x; y; z), удовлетворяющая равенству
пространства существует единственная упорядоченная тройка чисел (x; y; z), удовлетворяющая равенству
 = x
= x + y
+ y + z
+ z .
.

Рис. 184

Рис. 185
Доказательство. Пусть даны три некомпланарных вектора  ,
,  ,
,  и произвольный вектор
и произвольный вектор  .
.
Если вектор  компланарен с любыми двумя из данных трёх векторов
компланарен с любыми двумя из данных трёх векторов  ,
,  ,
,  , то теорема верна (например, если
, то теорема верна (например, если  компланарен с векторами
компланарен с векторами  и
и  , то
, то  = 0•
= 0• + y•
+ y• + z•
+ z• ) (рис. 184).
) (рис. 184).
Пусть теперь никакие три из векторов  ,
,  ,
,  ,
,  не компланарны.
не компланарны.
От произвольной точки O отложим векторы  =
=  ,
,  =
=  ,
,  =
=  и
и  =
=  . Так как направленные отрезки
. Так как направленные отрезки  ,
,  и
и  не компланарны, то плоскости AOB, AOC и BOC различны (рис. 185).
не компланарны, то плоскости AOB, AOC и BOC различны (рис. 185).
Проведём через точку D прямую, параллельную OC (D1 — точка пересечения этой прямой с плоскостью AOB). Тогда по правилу треугольника
 =
=  =
=  +
+  .(1)
.(1)
Векторы  ,
,  и
и  компланарны. Следовательно,
компланарны. Следовательно,  = x
= x + y
+ y . Так как
. Так как  =
=  , а вектор
, а вектор  коллинеарен вектору
коллинеарен вектору  =
=  , т. е.
, т. е.  = z
= z , то
, то
 =
=  = x
= x + y
+ y + z
+ z .
.
Таким образом, для произвольного вектора  пространства выполняется равенство
пространства выполняется равенство
 = x
= x + y
+ y + z
+ z ,(2)
,(2)
где  ,
,  ,
,  — данные некомпланарные векторы. Равенство (2) называется разложением вектора
— данные некомпланарные векторы. Равенство (2) называется разложением вектора  по трём некомпланарным векторам
по трём некомпланарным векторам  ,
,  и
и  ; числа x, y, z называются коэффициентами разложения.
; числа x, y, z называются коэффициентами разложения.
Докажем, что коэффициенты x, y и z в разложении (2) однозначно определены. Предположим, что существует другая тройка чисел (x1; y1; z1), для которой верно равенство
 = x1
= x1 + y1
+ y1 + z1
+ z1 .(3)
.(3)
Вычитая (3) из (2), получаем
(x – x1)  + (y – y1)
+ (y – y1)  + (z – z1)
+ (z – z1)  =
=  .
.
Из этого равенства на основании теоремы 35 следует, что либо векторы  ,
,  и
и  компланарны (что противоречит условию), либо z = z1, x = x1 и y = y1. Следовательно, тройки чисел (x; y; z) и (x1; y1; z1) равны. Теорема доказана. ▼
компланарны (что противоречит условию), либо z = z1, x = x1 и y = y1. Следовательно, тройки чисел (x; y; z) и (x1; y1; z1) равны. Теорема доказана. ▼
Из равенства  = x
= x + y
+ y + z
+ z следует, что любой вектор
следует, что любой вектор  пространства является линейной комбинацией тройки некомпланарных векторов
пространства является линейной комбинацией тройки некомпланарных векторов  ,
,  и
и  . Поэтому говорят, что эта тройка образует базис векторов в пространстве.
. Поэтому говорят, что эта тройка образует базис векторов в пространстве.
Определение. Базисом векторов в пространстве называется любая упорядоченная тройка некомпланарных векторов. Векторы, образующие базис, называются базисными векторами.
Базис из векторов  ,
,  и
и  обозначают (
обозначают ( ;
;  ;
;  ). Равенство
). Равенство  = x
= x + y
+ y + z
+ z называется разложением вектора
называется разложением вектора  по базису (
по базису ( ;
;  ;
;  ) или разложением вектора
) или разложением вектора  по базисным векторам
по базисным векторам  ,
,  и
и  ; числа x, y, z называются координатами вектора
; числа x, y, z называются координатами вектора  в базисе (
в базисе ( ;
;  ;
;  ).
).

Рис. 186
Из теоремы 36 следует, что любой вектор пространства можно единственным образом разложить в данном базисе.
ЗадаЧа. В тетраэдре PABC точка M — центроид (точка пересечения медиан, центр тяжести) треугольника PBC, точка H — середина ребра PC, точка E взята на ребре AP так, что AE : EP = 2 : 1. Разложить вектор  по базису (
по базису ( ;
;  ;
;  ), если
), если  =
=  ,
,  =
=  ,
,  =
=  (рис. 186).
(рис. 186).
Решение. По правилу ломаной
 =
=  +
+  +
+  .
.
Находим: AE : EP = 2 : 1.
 =
= 
 =
=  (
( –
–  ) =
) =  (
( –
–  );
);
 = –
= – = –
= –  ;
;
M — центроид треугольника PBC.
 =
= 
 =
=  •
• (
( +
+  ) =
) =  (
( +
+  ).
).
Тогда
 =
=  (
( –
–  ) –
) –  +
+  (
( +
+  ) = –
) = – 
 +
+ 
 –
– 
 .
.
Ответ: – 
 +
+ 
 –
– 
 .
.

Рис. 187
 Попробуйте доказать самостоятельно важный стереометрический факт. Пусть даны треугольник ABC и любая точка O, не лежащая в плоскости этого треугольника. В таком случае: точка M тогда и только тогда будет лежать в плоскости ABC, когда выполняется векторное равенство
Попробуйте доказать самостоятельно важный стереометрический факт. Пусть даны треугольник ABC и любая точка O, не лежащая в плоскости этого треугольника. В таком случае: точка M тогда и только тогда будет лежать в плоскости ABC, когда выполняется векторное равенство  = x•
= x• + y•
+ y• + z•
+ z• при условии, что x + y + z = 1 (рис. 187).
при условии, что x + y + z = 1 (рис. 187).

Рис. 188

ЗадаЧа 6.044. ABCDA1B1C1D1 — куб. Доказать, что центроид M треугольника ACD1 принадлежит диагонали B1D и делит её в отношении 1 : 2, считая от вершины D.
Решение. Для решения задачи достаточно убедиться, что векторы  и
и  (рис. 188) коллинеарны (почему?).
(рис. 188) коллинеарны (почему?).
Введём базис  =
=  ,
,  =
=  ,
,  =
=  и найдём разложение векторов
и найдём разложение векторов  и
и  по этому базису.
по этому базису.
По правилу параллелепипеда имеем
 =
=  +
+  +
+  =
=  +
+  +
+  .(1)
.(1)
Так как точка M — центроид треугольника ACD1, то
 =
=  (
( +
+  +
+  ) =
) =  (
( +
+  +
+  ).(2)
).(2)
Из (1) и (2) следует, что  =
= 
 , поэтому векторы
, поэтому векторы  и
и  коллинеарны и сонаправлены. Это означает, что точка M принадлежит диагонали DB1 и DM : DB1 = 1 : 3, откуда DM : MB1 = 1 : 2, что и требовалось доказать.
коллинеарны и сонаправлены. Это означает, что точка M принадлежит диагонали DB1 и DM : DB1 = 1 : 3, откуда DM : MB1 = 1 : 2, что и требовалось доказать.
