|
Как определить с Земли, на каком расстоянии (высоте) летит самолёт?Igor75 6 лет назад
Вот просто, стоя на Земле. Обычному человеку. Есть ли какой прибор? Если есть, то какая гарантия того, что этот прибор покажет истинное расстояние?
Росомаха 6 лет назад Проще простого и проще нету. Прибор называется ПК (персональный компьютер) и интернет. Способ применения: Видите пролетающий в небе самолет. Включаете компьютер, выходите на сайт этот или любой другой тому подобный, выбираете свой город, смотрите приблизительное расположение летящего самолета, щелкаете по нему и видите курс, скорость, фото самолета, куда и откуда летит и на какой высоте. система выбрала этот ответ лучшим
в избранное
ссылка
отблагодарить Igor75 Какая гарантия что данные там истинные?
Росомаха А вы лазерный дальномер возьмите и проверьте.
alexm12 6 лет назад Можно по угловому размеру самолета (если известен его размер). Можно с помощью лазерного дальномера. Можно методом триангуляции, с помощью двух наблюдателей, часов (для синхронизации) и двух теодолитов. Можно с помощью артиллерийского оптического дальномера. Да много приспособлений всяких есть. Но все они подходят для самолета летящего над головой.
в избранное
ссылка
отблагодарить Росомаха Блин, если двумя теодолитами замерять точку, летящую в небе, то расстояние между теодолитами надо тоже хотя бы километр-два. А тут уже и радиосвязь не помешает (сотовый вполне подойдет)
Знаете ответ? |



Изобретение относится к способам определения дальности до движущего воздушного объекта, например, самолета, пассивной оптической локацией, а именно к способам определения дальности по измерению характеристик изображений.
Известен способ лазерной локации RU 2456637, опубл. 20 07 2012. Технический результат достигается тем, что в способе лазерной локации, включающем сканирование пространства последовательностью лазерных сигналов, генерируемых лазерным локатором, регистрацию рассеянных и/или отраженных объектом лазерных сигналов, определения расстояния до объекта по времени задержки между излученными и принятыми сигналами, а углового положения объекта – по направлению соответствующего излученного сигнала, в качестве генерируемого лазерным локатором сигнала используют цуг, по меньшей мере, двух импульсов с изменяемыми промежутками времени между импульсами и/или соотношением амплитуд импульсов в каждом цуге.
Недостатком данного способа является то, что использование активных излучающих средств – лазера демаскирует факт локации движущегося воздушного объекта.
Известен триангуляционный способ измерения дальности до объекта, в котором используется несколько пассивных оптических средств, размещенных на местности на определенном расстоянии. Измеренные значения углов наблюдения объектов в каждом пассивном канале (количество каналов не менее двух) и известное базовое расстояние между ними, путем решения треугольника, находим высоту треугольника, которая соответствует дальности до самолета Теоретические основы радиолокации. / Я.Д. Ширман, В.Н Голиков, И.Н. Бусыгин и др.; Под ред. Я.Д. Ширмана. – М.: Сов. радио, 1970. – 559 с.
Недостатком способа является необходимость использования многопозиционной системы размещения пассивных измерительных устройств.
Наиболее близким к заявляемому способу является способ, в котором при известном размере местного предмета расстояние до него определяется с помощью меток, нанесенных в поле зрения прибора, например, бинокля http://voennizdat.ru/index/0-474. Шкала меток – тысячные1 (1тысячная – угловая величина, равная 1/1000 радиана или центральному углу, опирающемуся на дугу, равную 1/6000 части окружности). Для определения дальности до объекта необходимо в тысячных измерить угол У, под которым виден предмет и используя формулу 1 по известному размеру предмета В определяется расстояние до объекта.

Д – определяемое расстояние до объекта в метрах;
В – известная высота (длина, ширина) объекта в метрах;
У – измеренная угловая величина в тысячных, под каким виден объект.
Недостатком способа является приблизительность определения дальности из-за погрешности зрительного восприятия конкретного человека.
Задачей заявляемого способа является преодоление указанных недостатков.
Техническим результатом заявляемого способа является расширение возможностей навигации движущихся объектов, в частности за счет измерения дальности до движущегося воздушного объекта пассивными локационными средствами с использованием автоматизированного вычислительного алгоритма, исключающего ошибки связанные с человеческим фактором.
Технический результат достигается за счет осуществления заявляемого способа при помощи телевизионной системы высокой четкости с формированием оптического изображения движущегося воздушного судна; преобразования полученного изображения в цифровое; вычислению по оцифрованному изображению длины изображения с учетом проекционных искажений; идентификации типа движущегося воздушного объекта с определением его фактические линейные размеры по конструктивным особенностям движущегося воздушного объекта, используя специализированную базу данных; определении дальности до движущегося воздушного объекта как произведение фокусного расстояния оптической системы на соотношение фактического линейного размера к длине изображения движущегося воздушного объекта с учетом проекционных искажений.
Сущность способа измерения дальности поясняется Фиг. 1 и Фиг. 2.
Фиг. 1. Определение угла ориентации θ траектории полета самолета по концевым точкам крыла.
Фиг. 2. Определение дальности до самолета по его изображению.
Рассмотрим заявляемый способ на примере определения дальности до самолета.
Ориентация самолета в полете относительно оптической системы не влияет на точность измерения диаметра фюзеляжа. Используется геометрическое свойство проекций цилиндра, что какой бы не была его ориентация относительно наблюдателя, всегда найдется проекция, сечение которой будет точно соответствовать его диаметру. Диаметр фюзеляжа самолета фиксированная величина и составляет для различных типов самолетов, например, Airbus – dф: 3,95; 5,64; 6,0; 7,14 м.
Определения дальности до самолета по диаметру фюзеляжа dф осуществляется по формуле:

где Do – дальность до самолета;
dи – размер изображения диаметра фюзеляжа на матрице ФПУ;
dф – диаметр фюзеляжа;
Рассмотренному способу определения дальности свойственны следующие недостатки, связанные с тем, что появляются погрешности вычисления связанные с некоторым изменением dф по длине самолета, т.к. форма фюзеляжа не является цилиндрической. Необходимость определения малого размера изображения диаметра фюзеляжа на матрице ФПУ, также вносит погрешность в определение дальности до самолета.
Размер длины фюзеляжа Lф обычно более чем на порядок больше диаметра фюзеляжа dф, что снижает погрешность определения размера изображения длины фюзеляжа Lи на матрице ФПУ по сравнению с определением размера изображения диаметра фюзеляжа на матрице ФПУ dи.
В заявляемом способе наилучшая точность измерения дальности достигается на линии наблюдения, перпендикулярной траектории полета самолета.
Определение дальности до самолета по длине фюзеляжа Lф осуществляется по формуле

где Do – дальность до самолета;
Lф – длина фюзеляжа самолета;
Lи – размер изображения длины фюзеляжа на матрице ФПУ;
f – фокусное расстояние оптической системы.
Если самолет имеет ракурс наблюдения θ>100, то необходимо восстановить истинный размер изображения по формуле:

где 
Параметры а и b определяются при обработке оцифрованного изображения самолета Фиг. 1, а Lи
– размер изображения длины фюзеляжа на матрице ФПУ.
Способ осуществляется следующим образом: при помощи телевизионной системы высокой четкости формируют видеокадр изображения самолета в поле зрения оптической системы; оцифровывают изображение; измеряют размер изображения фюзеляжа самолета на матрице фотоприемного устройства и вычисляют длину изображения с учетом проекционных искажений, используя формулы 4 и 5; определяют его конструктивные особенности: число и расположение двигателей, одно или двух палубный фюзеляж и, сравнивая их с соответствующими значениями в базе данных, идентифицируют тип самолета и его модификацию; по геометрическим размерам вычисляют значение дальности до самолета по формуле (3).
Пример 1 осуществления способа для определения дальности до самолета.
На фото – приемной матрице оптико-электронного блока формируется изображение самолета. С фотоприемной матрицы сформированный видеокадр изображения оцифровывается, считываются в запоминающее устройство, и передается далее в блок обработки и измерения характеристик (деталей) изображения самолета Фиг. 1. Вертикальные и горизонтальные белые линии определяют положение самолета на матрице ФПУ.
Определяются параметры изображения необходимые для дальнейших вычислений: а=31 мм, b=45 мм, Lи=8,8 мм.
Определяется ракурс наблюдения

Производится восстановление истинного размера изображения
 Сравнением соотношений линейных параметров инвариантных к масштабу: по отношению ширины фюзеляжа к его длине, по отношению размаха крыла к длине фюзеляжа самолета, по числу двигателей с данными соответствующих баз данных, осуществляют идентификацию типа самолета – A3 80-800. Информация о типе самолета поступает в блок базы метрических данных, из которого в вычислительный блок поступает значение длины и диаметра фюзеляжа самолета в метрах – Lф=73 м.
Сравнением соотношений линейных параметров инвариантных к масштабу: по отношению ширины фюзеляжа к его длине, по отношению размаха крыла к длине фюзеляжа самолета, по числу двигателей с данными соответствующих баз данных, осуществляют идентификацию типа самолета – A3 80-800. Информация о типе самолета поступает в блок базы метрических данных, из которого в вычислительный блок поступает значение длины и диаметра фюзеляжа самолета в метрах – Lф=73 м.
Фокусное расстояние примененной оптической системы 1,0 м, длина фюзеляжа 73,0 м. Значение дальности до самолета: D0=f*Lф/Lи,
D0=1,0*73,0/0,002208=33061 м.
Заявленный способ позволяет работу оптико-электронных локационных средств делать скрытной, так как исключает использование активных излучающих средств локации и повысить точность навигации.
Изобретение относится к области измерения расстояний. Способ определения дальности до движущегося воздушного объекта методом пассивной локации включает получение оптического изображения движущегося воздушного объекта; преобразование полученного изображение в цифровое; распознавание изображения по оцифрованному изображению, определение параметров изображения с учетом проекционных искажений; определение дальности до движущегося объекта как произведение фокусного расстояния оптической системы на соотношение фактического линейного размера к длине изображения движущегося воздушного объекта с учетом проекционных искажений. Для получения оптического изображения используют телевизионную систему высокой четкости, причем учет проекционных искажений ведется с использованием значения ракурса вычисляемого как арктангенс отношения размеров вертикальной к горизонтальной проекции линии, соединяющей концы крыльев, а фактические линейные размеры движущегося воздушного объекта определяют путем идентификации его типа по конструктивным особенностям его изображения и использования специализированной базы данных. Технический результат заключается в расширении возможностей навигации движущихся объектов за счет измерения дальности до движущегося воздушного объекта пассивными локационными средствами с использованием автоматизированного вычислительного алгоритма, исключающего ошибки, связанные с человеческим фактором. 2 ил.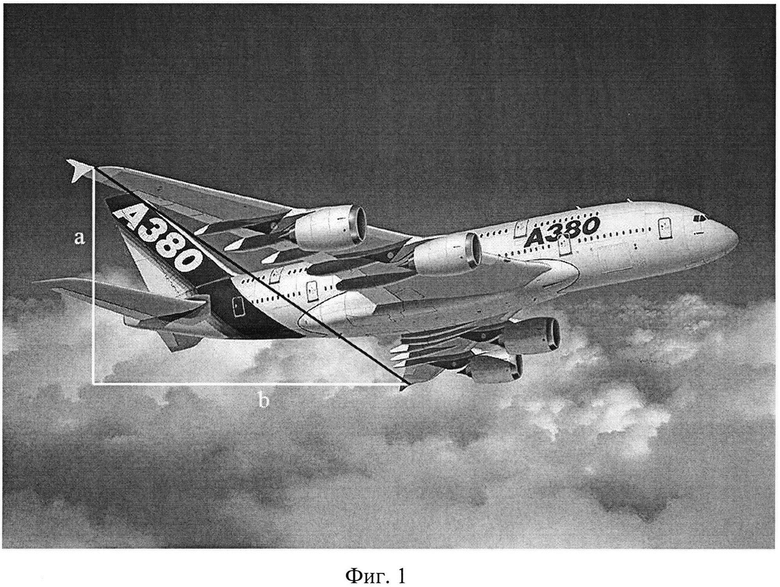
Способ определения дальности до движущегося воздушного объекта методом пассивной локации, включающий получение оптического изображения движущегося воздушного объекта; преобразование полученного изображение в цифровое; распознавание изображения по оцифрованному изображению, определение параметров изображения с учетом проекционных искажений; определение дальности до движущегося объекта как произведение фокусного расстояния оптической системы на соотношение фактического линейного размера к длине изображения движущегося воздушного объекта с учетом проекционных искажений, отличающийся тем, что для получения оптического изображения используют телевизионную систему высокой четкости, причем учет проекционных искажений ведется с использованием значения ракурса вычисляемого как арктангенс отношения размеров вертикальной к горизонтальной проекции линии, соединяющей концы крыльев, а фактические линейные размеры движущегося воздушного объекта определяют путем идентификации его типа по конструктивным особенностям его изображения и использования специализированной базы данных.
Определите расстояние до пролетающего самолёта в момент, когда наблюдатель услышал звук, если высота пролёта 4 км, скорость самолёта 510 м/с.
![]()
reshalka.com
ГДЗ Физика 7-9 классы сборник вопросов и задач к учебнику Перышкина автор Марон. Механические волны. Звук. Номер №1866
Решение
Дано:
h = 4 км;
v
з
в
=
332
м/с.
v
с
а
м
=
510
м/с.
Найти:
S − ?
СИ:
h = 4 м.
Решение:
Найдем время, через которое наблюдатель услышит звук:
h
=
v
з
в
∗
t
;
t
=
h
v
з
в
;
t
=
4000
332
=
12
с;
Найдем расстояние, которое пролетит самолет за время t:
l
=
v
с
а
м
∗
t
;
l = 510 * 12 = 6120 м.
По теореме Пифагора найдем расстояние до пролетающего самолёта в момент, когда наблюдатель услышал звук:
s
=
l
2
+
h
2
;
s
=
6120
2
+
4000
2
=
7311
м ≈ 7,3 км.
Ответ: 7,3 км.
-

Дано:
V = 300000 км/с
t = 0,0002 с
Найти: l – ?
V = S/t
S = Vt
S = 300000 км/с * 0,0002 с = 60 км
Т. к. сигнал шёл от радиолокатора до самолёта, а затем обратно, то l = S/2 = 30 км
- Комментировать
- Жалоба
- Ссылка
Найди верный ответ на вопрос ✅ «Какой и расстояние до самолета, если сигнал радиолокатора после отражения от самолета вернулся к радиолокатора через 0,0002 с? …» по предмету 📙 Физика, а если ответа нет или никто не дал верного ответа, то воспользуйся поиском и попробуй найти ответ среди похожих вопросов.
Искать другие ответы
Главная » Физика » Какой и расстояние до самолета, если сигнал радиолокатора после отражения от самолета вернулся к радиолокатора через 0,0002 с?
