Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Содержание
- Какую жесткость имеет пружина
- Как рассчитать жесткость пружины
- Определение коэффициента жесткости растяжения
- Формулы и способы расчета пружин из стали круглого сечения по ГОСТ 13765
- Методика определения размеров пружин
При колебаниях пружины восстанавливающая сила обусловлена ее упругостью. В определенных пределах, согласно закону Гука, вызванная деформацией сила пропорциональна величине деформации.
Поэтому упругие колебания являются гармоническими. В случае пружин величина жесткости обычно обозначается через k и именуется коэффициентом упругости пружины.
| k | коэффициент упругости пружины, | Ньютон / метр |
|---|---|---|
| F | сила, вызывающая деформацию Δl, | Ньютон |
| Δl | удлинение, прогиб или другое изменение формы, | метр |
| ω | угловая частота, | радиан / секунда |
| f | линейная частота, | Герц |
| T | период, длительность полного колебания, | секунда |
| m | масса колебательной системы, обычно тела, укрепленного на пружине, | кг |
И в соответствии с (9)
Масса самой пружины в (3, 4, 5) не учитывается. При точных расчетах массу m следует увеличить приблизительно на mпр/ 3 ( mпр — масса пружины).
Величины ω, f и T не зависят от амплитуды.
 Для определения устойчивости и сопротивления к внешним нагрузкам используется такой параметр, как жесткость пружины. Также он называется коэффициентом Гука или упругости. По сути, характеристика жесткости пружины определяет степень ее надежности и зависит от используемого материала при производстве.
Для определения устойчивости и сопротивления к внешним нагрузкам используется такой параметр, как жесткость пружины. Также он называется коэффициентом Гука или упругости. По сути, характеристика жесткости пружины определяет степень ее надежности и зависит от используемого материала при производстве.
Измерению коэффициента жесткости подлежат следующие типы пружин:
Изготовление пружин любого типа вы можете заказать здесь.
Какую жесткость имеет пружина
При выборе готовых пружин, например для подвески автомобиля, определить, какую жесткость она имеет, можно по коду продукта либо по маркировке, которая наносится краской. В остальных случаях расчет жесткости производится исключительно экспериментальными методами.
Жесткость пружины по отношению к деформации бывает величиной переменной или постоянной. Изделия, жесткость которых при деформации остается неизменной называются линейными. А те, у которых есть зависимость коэффициента жесткости от изменения положения витков, получили название «прогрессивные».
В автомобилестроении в отношении подвески существует следующая классификация жесткости пружин:
- Возрастающая (прогрессирующая). Характерна для более жесткого хода автомобиля.
- Уменьшающаяся (регрессирующая) жесткость. Напротив, обеспечивает, «мягкость» подвески.
Определение величины жесткости зависит от следующих исходных данных:
- Тип сырья, используемый при изготовлении;
- Диаметр витков металлической проволоки (Dw);
- Диаметр пружины (в расчет берется средняя величина) (Dm);
- Число витков пружины (Na).
Как рассчитать жесткость пружины
Для расчета коэффициента жесткости применяется формула:
k = G * (Dw)^4 / 8 * Na * (Dm)^3,
где G – модуль сдвига. Данную величину можно не рассчитывать, так как она приведена в таблицах к различным материалам. Например, для обыкновенной стали она равна 80 ГПа, для пружинной – 78,5 ГПа. Из формулы понятно, что наибольшее влияние на коэффициент жесткости пружины оказывают оставшиеся три величины: диаметр и число витков, а также диаметр самой пружины. Для достижения необходимых показателей жесткости изменению подлежат именно эти характеристики.
Вычислить коэффициент жесткости экспериментальным путем можно при помощи простейших инструментов: самой пружины, линейки и груза, который будет воздействовать на опытный образец.
Определение коэффициента жесткости растяжения
Для определения коэффициента жесткости растяжения производятся следующие расчеты.
- Измеряется длина пружины в вертикальном подвесе с одной свободной стороной изделия – L1;
- Измеряется длина пружины с подвешенным грузом – L2.Если взять груз массой 100гр., то он будет воздействовать силой в 1Н (Ньютон) – величина F;
- Вычисляется разница между последним и первым показателем длины – L;
- Рассчитывается коэффициент упругости по формуле: k = F/L.
Определение коэффициента жесткости сжатия производится по этой же формуле. Только вместо подвешивания груз устанавливается на верхнюю часть вертикально установленной пружины.
Подводя итог, делаем вывод, что показатель жесткости пружины является одной из существенных характеристик изделия, которая указывает на качество исходного материала и определяет долговечность использования конечного изделия.
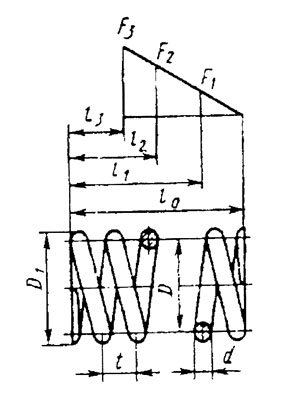
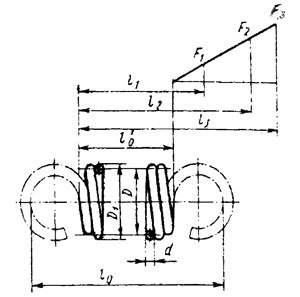
Формулы и способы расчета пружин из стали круглого сечения по ГОСТ 13765
Пружина сжатия Пружина растяжения
| Наименование параметра | Обозначение | Расчетные формулы и значения |
|---|---|---|
| Сила пружины при предварительной деформации, Н | F 1 | Принимается в зависимости от нагрузки пружины |
| Сила пружины при рабочей деформации (соответствует наибольшему принудительному перемещению подвижного звена в механизме), Н | F 3 | Принимается в зависимости от нагрузки пружины |
| Рабочий ход пружины, мм | h | Принимается в зависимости от нагрузки пружины |
| Наибольшая скорость перемещения подвижного конца пружины при нагружении или разгрузке, м/с | v max | Принимается в зависимости от нагрузки пружины |
| Выносливость пружины, число циклов до разрушения | N F | Принимается в зависимости от нагрузки пружины |
| Наружный диаметр пружины, мм | D 1 | Предварительно принимаются с учетом конструкции узла. Уточняются по таблицам ГОСТ 13766…ГОСТ 13776 |
| Относительный инерционный зазор пружины сжатия. Для пружин растяжения служит ограничением максимальной деформации | δ | δ = 1 — F 2 / F 3 (1) Для пружин сжатия классов I и II δ = 0,05 — 0,25 для пружин растяжения δ = 0,05 — 0,10 для одножильных пружин класса III δ = 0,10 — 0,40 для трехжильных класса III δ = 0,15 — 0,40 |
| Сила пружины при максимальной деформации, Н | F 3 |  |
Уточняется по таблицам ГОСТ 13766 ÷ ГОСТ 13776
Сила предварительного напряжения (при навивке из холоднотянутой и термообработанной проволоки), НF (0,1 ÷ 0,25) F 3Диаметр проволоки, ммdВыбирается по таблицам ГОСТ 13764 ÷ ГОСТ 13776Диаметр трехжильного троса, ммd 1Выбирается по таблицам ГОСТ 13764 ÷ ГОСТ 13776Жесткость одного витка пружины, Н/ммc 1Выбирается по таблицам ГОСТ 13764 ÷ ГОСТ 13776Максимальная деформация одного витка пружины, ммs’ (при F = 0)
s» (при F > 0)Выбирается по таблицам ГОСТ 13764 ÷ ГОСТ 13776
Максимальное касательное напряжение пружины, МПаτ 3
Для трехжильных пружин
Критическая скорость пружины сжатия, м/сv k
Для трехжильных пружин
Модуль сдвига, МПаGДля пружинной стали
G = 7,85 х 10 4Динамическая (гравитационная) плотность материала, Н • с 2 /м 4ρρ = γ / g,
где g — ускорение свободного падения, м/с 2
γ — удельный вес, Н/м 3
Для пружинной стали ρ = 8•10 3Жесткость пружины, Н/ммс
Для пружин с предварительным напряжением
Для трехжильных пружин
Число рабочих витков пружиныn Полное число витков пружиныn 1
Полное число витков пружиныn 1
где n2 — число опорных витков
Средний диаметр пружины, ммD
Для трехжильных пружин

Индекс пружиныi
Для трехжильных пружин
Рекомендуется назначать от 4 до 12
Коэффициент расплющивания троса в трехжильной пружине, учитывающий увеличение сечения витка вдоль оси пружины после навивкиΔДля трехжильного троса с углом свивки β = 24° определяется по таблице
| i | 4,0 | 4,5 | 5,0 | 5,5 | 6,0 | 7,0 и более |
| Δ | 1,029 | 1,021 | 1,015 | 1,010 | 1,005 | 1,000 |
Предварительная деформация пружины, ммs 1 Рабочая деформация пружины, ммs 2
Рабочая деформация пружины, ммs 2 Максимальная деформация пружины, ммs 3
Максимальная деформация пружины, ммs 3 Длина пружины при максимальной деформации, ммl 3
Длина пружины при максимальной деформации, ммl 3
где n3 — число обработанных витков
Для трехжильных пружин

Для пружин растяжения с зацепами

Длина пружины в свободном состоянии, ммl  Длина пружины растяжения без зацепов в свободном состоянии, ммl’
Длина пружины растяжения без зацепов в свободном состоянии, ммl’  Длина пружины при предварительной деформации, ммl 1
Длина пружины при предварительной деформации, ммl 1
Для пружин растяжения

Длина пружины при рабочей деформации, ммl 2
Для пружин растяжения
Шаг пружины в свободном состоянии, ммt
Для трехжильных пружин

Для пружин растяжения

Напряжение в пружине при предварительной деформации, МПаτ 1 Напряжение в пружине при рабочей деформации, МПаτ 2
Напряжение в пружине при рабочей деформации, МПаτ 2 Коэффициент, учитывающий кривизну витка пружиныk
Коэффициент, учитывающий кривизну витка пружиныk
Для трехжильных пружин
Длина развернутой пружины (для пружин растяжения без зацепов), ммl Масса пружины (для пружин растяжения без зацепов), кгm
Масса пружины (для пружин растяжения без зацепов), кгm Объем, занимаемый пружиной (без учета зацепов пружины), мм 3V
Объем, занимаемый пружиной (без учета зацепов пружины), мм 3V Зазор между концом опорного витка и соседним рабочим витком пружины сжатия, ммλУстанавливается в зависимости от формы опорного виткаВнутренний диаметр пружины, ммD 2
Зазор между концом опорного витка и соседним рабочим витком пружины сжатия, ммλУстанавливается в зависимости от формы опорного виткаВнутренний диаметр пружины, ммD 2 Временное сопротивление проволоки при растяжении, МПаR mУстанавливается при испытаниях проволоки или по ГОСТ 9389 и ГОСТ 1071Максимальная энергия, накапливаемая пружиной, или работа деформации, мДж
Временное сопротивление проволоки при растяжении, МПаR mУстанавливается при испытаниях проволоки или по ГОСТ 9389 и ГОСТ 1071Максимальная энергия, накапливаемая пружиной, или работа деформации, мДж Для пружин сжатия и растяжения без предварительного напряжения
Для пружин сжатия и растяжения без предварительного напряжения
Для пружин растяжения с предварительным напряжением
Методика определения размеров пружин
Исходными величинами для определения размеров пружин являются силы F 1 и F 2, рабочий ход h, наибольшая скорость перемещения подвижного конца пружины при нагружении или при разгрузке v max, выносливость N F и наружный диаметр пружины D 1 (предварительный).
Если задана только одна сила F2 , то вместо рабочего хода h для подсчета берут величину рабочей деформации s 2, соответствующую заданной силе
По величине заданной выносливости NF предварительно определяют принадлежность пружины к соответствующему классу
По заданной силе F 2 и крайним значениям инерционного зазора δ вычисляют по формуле (2) значение силы F 3
По значению F 3, пользуясь таблицей, предварительно определяют разряд пружины
По таблицам «Параметры пружин» находят строку, в которой наружный диаметр витка пружины наиболее близок к предварительно заданному значению D 1. В этой же строке находят соответствующие значения силы F 3 и диаметра проволоки d
Для пружин из закаливаемых марок сталей максимальное касательное напряжение τ 3 находят по таблице, для пружин из холоднотянутой и термообработанной проволоки τ 3 вычисляют с учетом значений временного сопротивления Rm . Для холоднотянутой проволоки Rm определяют из ГОСТ 9389, для термообработанной — из ГОСТ 1071
По полученным значениям F 3 и τ 3, а также по заданному значению F 2 по формулам (5) и (5а) вычисляют критическую скорость vK и отношение vmax / vK , подтверждающее или отрицающее принадлежность пружины к предварительно установленному классу.
При несоблюдении условий vmax / vK < 1 пружины I и II классов относят к последующему классу или повторяют расчеты, изменив исходные условия. Если невозможно изменение исходных условий, работоспособность обеспечивается комплектом запасных пружин
По окончательно установленному классу и разряду в соответствующей таблице на параметры витков пружин, помимо ранее найденных величин F3, D1 и d, находят величины c1 и s3 , после чего остальные размеры пружины и габариты узла вычисляют по формулам (6)-(25)
Основные
понятия
Пружина
растяжения — это спирально-цилиндрическая
пружина, витки которой прилегают друг
к другу. Пружина подвергается действию
противоположно направленных усилий,
приложенных вдоль ее оси.
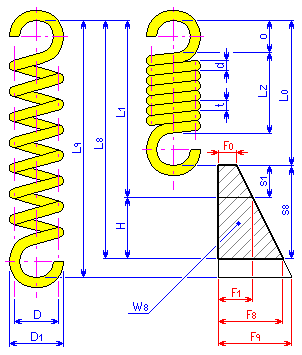
Размеры
|
d |
диаметр |
|
D |
средний |
|
D1 |
наружный |
|
D2 |
внутренний |
|
H |
рабочая |
|
t |
шаг |
|
o |
высота |
|
sx |
деформация |
|
Lx |
длина |
|
Fx |
рабочая |
|
W8 |
энергия |
|
x |
индекс, |
Навивка
-
Вправо
(стандарт) -
Влево
(должна отображаться соответствующая
надпись)
Состояния
-
Свободное:
пружина не нагружена (индекс 0) -
Предварительная
нагрузка: пружина с минимальной рабочей
нагрузкой (индекс 1) -
Полная
нагрузка: пружина с максимальной рабочей
нагрузкой (индекс 8) -
Предел:
пружина вдавлена до касания витков
(индекс 9).
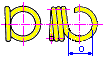
Зацепы
пружин растяжения
Высота
зацепа пружины растяжения
![]()
Где:
|
L0 |
длина |
|
LZ |
длина |
Часто
используемые зацепы пружин растяжения
|
Тип |
Изображение |
|
Половина |
|
|
Обычно |
|
|
Полный |
|
|
Используется |
|
|
Полный |
|
|
Когда |
|
|
Полный |
|
|
Обычно |
|
|
Поднятый |
|
|
Обычно |
|
|
Два |
|
|
Используется |
|
|
Два |
|
|
Когда |






Расчет
пружин в метрических единицах
Общие
формулы расчета
Коэффициент
использования материала
Наружный
диаметр пружины
D1 =
D + d [мм]
Где:
|
D |
средний |
|
|
d |
диаметр |
Внутренний
диаметр пружины
D2 =
D – d [мм]
Где:
|
D |
средний |
|
|
d |
диаметр |
Рабочая
деформация
H
= L81=
s81[мм]
Где:
|
L8 |
длина |
|
|
L1 |
длина |
|
|
s8 |
деформация |
|
|
s1 |
деформация |
Высота
зацепа пружины
Где:
|
L0 |
длина |
|
|
LZ |
длина |
Индекс
пружины
c
= D/d [-]
Где:
|
D |
средний |
|
|
d |
диаметр |
Поправочный
коэффициент Валя
Где:
|
c |
индекс |
|
|
LZ |
длина |
Начальное
растяжение
![]()
Где:
|
d |
диаметр |
|
|
0 |
напряжение |
|
|
D |
средний |
|
|
Kw |
поправочный |
Общая
сила, действующая в пружине
Где:
|
d |
диаметр |
|
|
G |
напряжение |
|
|
D |
средний |
|
|
Kw |
поправочный |
|
|
G |
модуль |
Жесткость
пружины
Где:
|
d |
диаметр |
|
|
G |
модуль |
|
|
D |
средний |
|
|
n |
количество |
|
|
F8 |
рабочее |
|
|
F1 |
рабочее |
|
|
H |
рабочая |
Расчет
конструкции пружины
При
проектировании пружины подбирается
диаметр проволоки, количество витков
и длина свободной пружины L0 для
заданной нагрузки, материала и сборочных
размеров.
![]()
Если
рассчитанная пружина не соответствует
ни одному значению диаметра проволоки
для данного напряжения 0 согласно
формуле, расчет пружины повторяется с
использованием скорректированного
значения напряжения в свободном состоянии
из рекомендуемого диапазона.
![]()
Пружине
без начального растяжения соответствует
средний рекомендуемый шаг витков t =
0,35 D [мм].
Если
рассчитанная пружина не соответствует
ни одному значению диаметра проволоки
для выбранного шага, расчет пружины
повторяется с использованием
скорректированного значения шага из
рекомендуемого диапазона 0,3 D ≤ t ≤ 0,4
D [мм].
Конструкция
пружины определяется с учетом условия
прочности 8≤ usA и
рекомендуемых диапазонов некоторых
геометрических параметров пружины:
L0≤ D
и L0≤ 31,5
д и 4 ≤ D/d ≤16 и n 2.
Задание
нагрузки, материала и сборочных размеров
пружины
Вначале
выполняется проверка входных величин
для расчета.
Затем
вычисляется длина пружины в свободном
состоянии.
![]()
После
расчета выбирается диаметр проволоки,
количество витков и диаметры пружины
– так, чтобы высота зацепа соответствовала
выбранному типу зацепа. Кроме того,
должны выполняться упомянутые выше
прочностные и геометрические условия.
Конструкция пружины должна удовлетворять
по диаметрам всем заданным начальным
условиям. При отсутствии таких
дополнительных условий предельный
диаметр пружины устанавливается по
геометрическим условиям для
минимально/максимально допустимого
диаметра проволоки.
Отбираются
все диаметры проволоки (от меньшего к
большему), которые проходят по прочностным
и геометрическим условиям. Проверяются
высота зацепа и количество витков. Если
все условия выполнены, расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Вычисленное
значение высоты зацепа должно находиться
в пределах d ≤ o ≤ 30 d. Комбинация
диаметра проволоки, количества витков
и диаметра пружины должна давать в итоге
такую высоту зацепа, которая удовлетворяет
его типу. Вначале в качестве типа зацепа
берется полный виток, затем, если он не
годится–полный виток внутри и т.д.
Задание
нагрузки, материала и диаметра пружины
Вначале
выполняется проверка входных величин
для расчета.
После
проверки выбирается диаметр проволоки,
количество витков, длина пружины в
свободном состоянии и сборочные размеры
пружины – так, чтобы высота зацепа
соответствовала выбранному типу зацепа.
Кроме того, должны выполняться прочностные
и геометрические условия. Если сборочный
размер L1 или
L8 взят
из спецификации или значение рабочей
деформации пружины ограничено, конструкция
пружины должна соответствовать этому
условию. В остальных случаях предельные
значения сборочных размеров пружины и
ее длины в свободном состоянии определяются
геометрическими условиями для заданного
диаметра пружины и минимального/максимального
допустимого диаметра проволоки.
Формула
для проектирования пружины по заданному
диаметру проволоки.
где
значение 8 =
0,85 A используется
в качестве величины напряжения материала
пружины при кручении в полностью
нагруженном состоянии.
Если
для данного диаметра проволоки не
удается подобрать подходящую комбинацию
размеров пружины, расчетная процедура
оценивает другие диаметры проволоки.
Они проверяются, начиная от меньшего к
большему, до тех пор пока не будет
достигнуто такое количество витков,
при котором высота зацепа удовлетворяет
всем условиям. Расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Вычисленное
значение высоты зацепа должно находиться
в пределах d ≤ o ≤ 30 d. Для
высоты, вычисленной таким способом,
выбирается соответствующий тип зацепа.
Комбинация диаметра проволоки, количества
витков, длины пружины в свободном
состоянии и сборочных размеров пружины
должна давать в итоге такую высоту
зацепа, которая удовлетворяет его типу.
Вначале в качестве типа зацепа берется
полный виток, затем, если он не
годится–полный виток внутри и т.д.
Задание
максимального рабочего усилия, материала,
сборочных размеров и диаметра пружины
Вначале
выполняется проверка входных величин
для расчета.
Затем
подбирается диаметр проволоки, количество
витков, длина свободной пружины и
минимальное рабочее усилие F1 таким
образом, чтобы высота зацепа пружины
соответствовала выбранному типу зацепа.
Кроме того, должны выполняться прочностные
и геометрические условия.
Формула
для проектирования пружины по заданному
диаметру проволоки.
где
значение 8 =
0,9 A используется
в качестве величины напряжения материала
пружины при кручении в полностью
нагруженном состоянии.
Если
для данного диаметра проволоки не
удается подобрать подходящую комбинацию
размеров пружины, расчетная процедура
оценивает другие диаметры проволоки.
Они проверяются, начиная от меньшего к
большему, до тех пор пока не будет
достигнуто такое количество витков,
при котором высота зацепа удовлетворяет
всем условиям. Расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Проверочный
расчет пружины
Расчет
соответствующих значений сборочных
размеров и рабочего отклонения для
указанной нагрузки, материала и размеров
пружины.
Сначала
проверяются расчетные входные значения.
Затем на основании приведенных ниже
формул вычисляются сборочные размеры.
Длина
предварительно нагруженной пружины
![]()
Длина
полностью нагруженной пружины
![]()
Где:
|
L0 |
длина |
|
|
F1 |
рабочая |
|
|
D |
средний |
|
|
n |
количество |
|
|
G |
модуль |
|
|
d |
диаметр |
|
|
F8 |
рабочее |
Рабочая
деформация
H
= L18[мм]
Расчет
рабочих сил
Расчет
соответствующих сил, действующих в
пружинах в рабочем состоянии для
указанного материала, сборочных размеров
и размеров пружины. Сначала проверяются
и рассчитываются входные данные, а затем
выполняется расчет рабочих сил с помощью
следующих формул.
Минимальное
рабочее усилие
![]()
Максимальное
рабочее усилие
![]()
Расчет
выходных параметров пружины
Эта
часть является общей для всех типов
расчета пружины. Расчет производится
в следующем порядке.
Коэффициент
высоты зацепа
![]()
Жесткость
пружины
Длина
части с витками
|
Пружина |
|
|
Lz = |
|
|
Пружина |
|
|
Lz = |
Деформация
предварительно нагруженной пружины
s1 =
L1 –
L0 [мм]
Полная
деформация пружины
s8 =
L8 –
L0 [мм]
Напряжение
при кручении материала пружины в
состоянии предварительной нагрузки
Напряжение
материала пружины при кручении при
полном нагружении
Предельное
усилие в пружине
![]()
Деформация
в предельном состоянии
![]()
Где:
|
k |
жесткость |
|
|
F9 |
рабочее |
|
|
F0 |
начальное |
Предельная
длина пружины
L9 =
L0 +
s9 [мм]
Энергия
деформации пружины
![]()
Длина
развернутой проволоки
|
l |
|||
|
Где |
|||
|
для |
|||
|
l0 = D |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = D |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
Масса
пружины
![]()
Собственная
частота колебаний пружины
Проверка
нагрузки пружины
8≤ us
A
Обзор
используемых переменных:
|
d |
диаметр |
|
k |
жесткость |
|
D |
средний |
|
D1 |
наружный |
|
D2 |
внутренний |
|
F |
обобщенное |
|
G |
модуль |
|
H |
рабочая |
|
c |
индекс |
|
Kw |
поправочный |
|
l |
длина |
|
L |
обобщенная |
|
LZ |
длина |
|
m |
масса |
|
n |
количество |
|
o |
высота |
|
t |
шаг |
|
s |
обобщенная |
|
us |
коэффициент |
|
|
плотность |
|
|
напряжение |
|
A |
допустимое |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Сила упругости. Закон Гука
- Виды деформаций
- Закон Гука
- Измерение силы с помощью динамометра
- Задачи
п.1. Виды деформаций
Под действием силы все тело или отдельные его части приходят в движение.
При движении одних частей тела относительно других происходит изменение формы и размеров.
Деформация – это изменение взаимного положения частиц тела, связанное с их перемещением друг относительно друга под действием приложенной силы, при котором тело изменяет свою форму и размеры.
 |
К простейшим видам деформации относятся:
|
Различают упругие (обратимые) и неупругие (необратимые) деформации.
Деформация является упругой, если, после прекращения действия вызвавших её сил, тело полностью восстанавливает свою форму и размеры.
Например, если немного согнуть школьную линейку, растянуть пружину или надавить на воздушный шарик, после прекращения действия силы линейка выпрямится, пружина сожмется, и шарик опять станет круглым. Эти деформации – упругие, они обратимы.
Если же приложенная сила окажется слишком большой, линейка сломается, пружина так и останется растянутой, а шарик лопнет. Эти деформации – неупругие, они необратимы.
Все здания и сооружения вокруг нас рассчитываются так, чтобы их «нагруженные» части испытывали только упругие деформации; это обеспечивает надёжность и долговечность конструкций.
Восстановление формы и размера тела при упругой деформации происходит под действием силы упругости, которая возникает благодаря межатомным и межмолекулярным взаимодействиям.

Сила упругости уравновешивает действие внешней силы и направлена в сторону, противоположную смещению частиц.
Например (см. рисунок):
- при растяжении сила упругости стремится сжать тело;
- при сжатии сила упругости стремится распрямить тело.
п.2. Закон Гука
 |
Проведем серию опытов с пружиной. Пусть при действии на пружину силой (F) мы получаем деформацию (удлинение) (Delta l). При этом в пружине возникают силы упругости, стремящиеся вернуть её в исходное положение, (overrightarrow{F_{text{упр}}}=-overrightarrow{F}). Если приложенную силу увеличить в 2 раза, то деформация также увеличится в 2 раза. Увеличение силы в 3 раза приводит к росту деформации в 3 раза и т.д. Опыты показывают, что во всех случаях деформация будет прямо пропорциональна приложенной силе. |
Следовательно, сила упругости также будет прямо пропорциональна деформации: $$ F_{text{упр}}simDelta l $$
Для каждого тела отношение силы упругости к величине деформации при малых упругих деформациях является постоянной величиной $$ k=frac{F_{text{упр}}}{Delta l}=const $$ которая называется коэффициентом упругости или жесткостью.
Жесткость тела зависит от формы, размеров и материала, из которого оно изготовлено.
В системе СИ жесткость измеряется в ньютонах на метр, (frac{text{Н}}{text{м}}).
Закон Гука
Сила упругости, возникающая во время упругой деформации тела, прямо пропорциональна удлинению (величине деформации): $$ F_{text{упр}}=kDelta l $$ Сила упругости всегда направлена противоположно деформации.
п.3. Измерение силы с помощью динамометра
 |
Динамометр– это прибор для измерения силы.
Простейший пружинный динамометр состоит из пружины с крючком и дощечки со шкалой (проградуированной в ньютонах). |
В технике используются динамометры более сложных конструкций.
Но принцип действия – использование закона Гука – во многих из них сохраняется.
п.4. Задачи
Задача 1. Резиновая лента удлинилась на 10 см под действием силы 50 Н. Какова жесткость ленты?
Дано:
(Delta l=10 text{см}=0,1 text{м})
(F=50 text{Н})
__________________
(k-?)
Жесткость ленты $$ k=frac{F}{Delta l} $$ $$ k=frac{50}{0,1}=500 left(frac{text{Н}}{text{м}}right) $$ Ответ: 500 Н/м
Задача 2. Под действием силы 300 Н пружина динамометра удлинилась на 0,6 см. Каким будет удлинение пружины под действием силы 700 Н? Ответ запишите в миллиметрах.
Дано:
(F_1=300 text{Н})
(Delta l_1=0,6 text{см}=6cdot 10^{-3} text{м})
(F_2=700 text{Н})
__________________
(Delta l_2-?)
Жесткость пружины begin{gather*} k=frac{F_1}{Delta l_1}=frac{F_2}{Delta l_2}Rightarrow Delta l_2=frac{F_2}{F_1}Delta l_1\[6pt] Delta l_2=frac{700}{300}cdot 6cdot 10^{-3}=14cdot 10^{-3} (text{м})=14 (text{мм}) end{gather*} Ответ: 14 мм
Задача 3. Пружина без груза имеет длину 30 см и коэффициент жесткости 20 Н/м. Найдите длину растянутой пружины, если на нее действует сила 5 Н. Ответ запишите в сантиметрах.
Дано:
(l_0=30 text{cм}=0,3 text{м})
(k=20 text{Н/м})
(F=5 text{Н})
__________________
(l-?)
Удлинение пружины под действием силы: $$ Delta l=frac Fk $$ Длина растянутой пружины begin{gather*} l=l_0+Delta l=l_0+frac Fk\[6pt] l=0,3+frac{5}{20}=0,3+0,25=0,55 (text{м})=55 (text{cм}) end{gather*} Ответ: 55 cм
Задача 4*. Грузовик взял на буксир легковой автомобиль массой 1,5 т с помощью троса. Двигаясь равноускоренно, они проехали путь 600 м за 50 с. На сколько миллиметров удлинился во время движения трос, если его жесткость равна (3cdot 10^5 text{Н/м})?
Дано:
(m=1,5 text{т}=1500 text{кг})
(s=600 text{м})
(t=50 text{c})
(v_0=0)
(k=3cdot 10^5 text{Н/м})
__________________
(Delta l-?)
Сила упругости, возникающая в тросе, уравновешивает силу тяги, передвигающую автомобиль с постоянным ускорением: $$ F_{text{упр}}=kDelta l=F_{text{т}}=ma $$ Перемещение из состояния покоя $$ s=frac{at^2}{2}Rightarrow a=frac{2s}{t^2} $$ Получаем: begin{gather*} kDelta l=mcdotfrac{2s}{t^2}Rightarrow Delta l=frac mkcdot frac{2s}{t^2}\[6pt] Delta l=frac{1500}{3cdot 10^5}cdot frac{2cdot 600}{50^2}=2,4cdot 10^{-3} (text{м})=2,4 (text{мм}) end{gather*} Ответ: 2,4 мм
Формула жесткости пружины в физике
Формула жесткости пружины
Определение и формула жесткости пружины
Определение
Силу, которая возникает в результате деформации тела и пытающаяся вернуть его в исходное состояние, называют силой упругости.
Чаще всего ее обозначают ${overline{F}}_{upr}$. Сила упругости появляется только при деформации тела и исчезает, если пропадает деформация. Если после снятия внешней нагрузки тело восстанавливает свои размеры и форму полностью, то такая деформация называется упругой.
Современник И. Ньютона Р. Гук установил зависимость силы упругости от величины деформации. Гук долго сомневался в справедливости своих выводов. В одной из своих книг он привел зашифрованную формулировку своего закона. Которая означала: «Ut tensio, sic vis» в переводе с латыни: каково растяжение, такова сила.
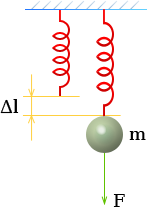
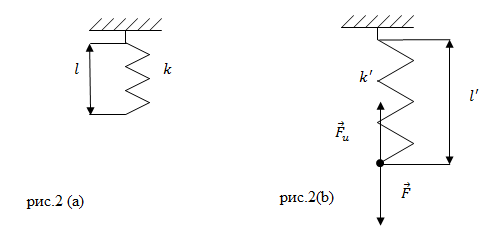
Рассмотрим пружину, на которую действует растягивающая сила ($overline{F}$), которая направлена вертикально вниз (рис.1).
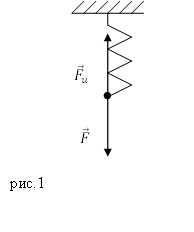
Силу $overline{F }$ назовем деформирующей силой. От воздействия деформирующей силы длина пружины увеличивается. В результате в пружине появляется сила упругости (${overline{F}}_u$), уравновешивающая силу $overline{F }$. Если деформация является небольшой и упругой, то удлинение пружины ($Delta l$) прямо пропорционально деформирующей силе:
[overline{F}=kDelta lleft(1right),]
где в коэффициент пропорциональности называется жесткостью пружины (коэффициентом упругости) $k$.
Жесткость (как свойство) – это характеристика упругих свойств тела, которое деформируют. Жесткость считают возможностью тела оказать противодействие внешней силе, способность сохранять свои геометрические параметры. Чем больше жесткость пружины, тем меньше она изменяет свою длину под воздействием заданной силы. Коэффициент жесткости – это основная характеристика жесткости (как свойства тела).
Коэффициент жесткости пружины зависит от материала, из которого сделана пружина и ее геометрических характеристик. Например, коэффициент жесткости витой цилиндрической пружины, которая намотана из проволоки круглого сечения, подвергаемая упругой деформации вдоль своей оси может быть вычислена как:
[k=frac{Gd^4}{8d^3_pn}left(2right),]
где $G$ – модуль сдвига (величина, зависящая от материала); $d$ – диаметр проволоки; $d_p$ – диаметр витка пружины; $n$ – количество витков пружины.
Единицей измерения коэффициента жесткости в Международной системе единиц (Си) является ньютон, деленный на метр:
[left[kright]=left[frac{F_{upr }}{x}right]=frac{left[F_{upr }right]}{left[xright]}=frac{Н}{м}.]
Коэффициент жесткости равен величине силы, которую следует приложить к пружине для изменения ее длины на единицу расстояния.
Формула жесткости соединений пружин
Пусть $N$ пружин соединены последовательно. Тогда жесткость всего соединения равна:
[frac{1}{k}=frac{1}{k_1}+frac{1}{k_2}+dots =sumlimits^N_{ i=1}{frac{1}{k_i}left(3right),}]
где $k_i$ – жесткость $i-ой$ пружины.
При последовательном соединении пружин жесткость системы определяют как:
[k=k_1+k_2+dots +sumlimits^N_{i=1}{k_i}left(4right).]
Примеры задач с решением
Пример 1
Задание. Пружина в отсутствии нагрузки имеет длину $l=0,01$ м и жесткость равную 10 $frac{Н}{м}. $Чему будет равна жесткость пружины и ее длина, если на пружину действовать силой $F$= 2 Н? Считайте деформацию пружины малой и упругой.
Решение. Жесткость пружины при упругих деформациях является постоянной величиной, значит, в нашей задаче:
[k=k’left(1.1right).]
При упругих деформациях выполняется закон Гука:
[F=kDelta l left(1.2right).]
Из (1.2) найдем удлинение пружины:
[Delta l=frac{F}{k}left(1.3right).]
Длина растянутой пружины равна:
[l’=l+Delta l=l+frac{F}{k}.]
Вычислим новую длину пружины:
[l’=0,01+frac{2}{10}=0,21 left(мright).]
Ответ. 1) $k’=10 frac{Н}{м}$; 2) $l’=0,21$ м
Пример 2
Задание. Две пружины, имеющие жесткости $k_1$ и $k_2$ соединили последовательно. Какой будет удлинение первой пружины (рис.3), если длина второй пружины увеличилась на величину $Delta l_2$?
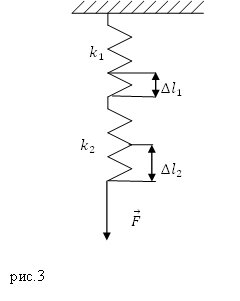
Решение. Если пружины соединены последовательно, то деформирующая сила ($overline{F}$), действующая на каждую из пружин одинакова, то есть можно записать для первой пружины:
[F=k_1Delta l_1left(2.1right).]
Для второй пружины запишем:
[F=k_2Delta l_2left(2.2right).]
Если равны левые части выражений (2.1) и (2.2), то можно приравнять и правые части:
[k_1Delta l_1=k_2Delta l_2left(2.3right).]
Из равенства (2.3) получим удлинение первой пружины:
[Delta l_1=frac{k_2Delta l_2}{k_1}.]
Ответ. $Delta l_1=frac{k_2Delta l_2}{k_1}$
Читать дальше: формула закона Архимеда.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
