Привет! В этой статье предлагаю поговорить о реакциях опор, еще известных как опорные реакции. Для успешного освоения курса – «сопротивление материалов», каждый студент должен уметь определять реакции опор, чему учат еще в рамках дисциплины — «теоретическая механика». Но для тех, кто проспал механику на первом курсе, я подготовил данную статью, чтобы каждый желающий мог приобрести навыки по расчету опорных реакций.
Так как этот урок для чайников, я многие моменты буду упрощать и рассказывать только самое основное, чтобы написанное здесь, было понятно даже самому неподготовленному студенту — заочнику.
В рамках статьи рассмотрим 4 примера: двухопорная балка, загруженная посередине пролёта сосредоточенной силой, такая же балка, но загруженная распределённой нагрузкой, консольная балка и плоская рама.
Что такое реакция опоры?
Чтобы лучше понять, что такое реакция опоры (опорная реакция), давай рассмотрим следующий пример — балку (стержень) лежащую на опорах:

На балку давит нагрузка – сила, в свою очередь, балка давит на опоры. И чтобы балка лежала на опорах (никуда не проваливалась), опоры выполняют свою основную функцию — удерживают балку. А чтобы удерживать балку, опоры должны компенсировать тот вес, с которым балка давит на них. Соответственно, действие опор можно представить в виде некоторых сил, так называемых — реакций опор.

Для балки, и нагрузка, и реакции опор, будут являться внешними силами, которые нужно обязательно учитывать при расчёте балки. А чтобы учесть опорные реакции, сначала нужно научиться определять их, чем, собственно, и займёмся на этом уроке.
Виды связей и их реакции
Связи – это способы закрепления элементов конструкций. Опоры, которые я уже показывал ранее – это тоже связи.
В этой статье будем рассматривать три вида связей: жёсткая заделка, шарнирно-подвижная и шарнирно-неподвижная опора.
Жёсткая заделка

Жёсткая заделка — это один из вариантов закрепления элементов конструкций. Этот тип связи препятствует любым перемещениям, тем самым для плоской задачи, может возникать три реакции: вертикальная (RA), горизонтальная (HA) и момент (MA).

Шарнирно-подвижная и шарнирно-неподвижная опора
В этой статье будем работать с двумя типами опор: шарнирно-подвижной и шарнирно-неподвижной.

В шарнирно-неподвижной опоре возникает две реакции: вертикальная и горизонтальная. Так как опора препятствует перемещению в этих двух направлениях. В шарнирно-подвижной опоре возникает только вертикальная реакция.

Однако, видов связей и их условных обозначений достаточно много, но в рамках этой статьи их все рассматривать не будем. Так как, изученные ранее виды связей, являются основными и практически всегда, при решении задач по сопромату, ты будешь сталкиваться именно с ними.
Что такое момент силы?
Также необходимо разобраться с понятием момент силы.
Момент силы — это произведение силы на плечо. Где плечо — это кратчайшее расстояние от точки до силы, то есть перпендикуляр.
Проиллюстрирую написанное:

Правило знаков для моментов
Также для моментов, нужно задаться каким-то правилом знаков. Я в своих уроках буду придерживаться такого правила:
- если сила относительно точки стремится повернуть ПРОТИВ часовой стрелки, то момент положительный;
- если она стремится повернуть ПО часовой стрелке, то момент отрицательный.

Всю подготовительную информацию дал, теперь будем рассматривать конкретные примеры. И начнём с простейшей расчётной схемы балки.
Определение реакций для двухопорной балки
Возьмём балку, загруженную посередине сосредоточенной силой и опирающейся на шарнирно-неподвижную и шарнирно-подвижную опору:

Введём систему координат: направим ось x вдоль балки, а ось y вертикально. Обозначим реакции в опорах как HA, RA и RB:

Для тех, кто пришёл сюда, ещё будучи на этапе изучения теоретической механики, а я знаю, таких будет много, важно отметить, что в сопромате не принято указывать знаки векторов над силами.
В термехе же, в обязательном порядке, преподаватель от тебя настойчиво будет требовать указывать знак вектора над всеми силами, вот так:

Условия равновесия системы
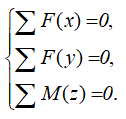
Чтобы найти все реакции, нужно составить и решить три уравнения — уравнения равновесия:

Данные уравнения являются условиями равновесия системы. А так как мы предполагаем, что опоры обеспечивают это состояние равновесия (удерживают балку). То составив и решив уравнения равновесия — найдём значения опорных реакций.
Первое уравнение называется уравнением проекций — суммой проекций всех сил на координатную ось, которая должна быть равна нулю. Два других уравнения называются уравнениями моментов — суммами моментов всех сил относительно точек, которые должны быть равны нулю.
Уравнения равновесия
Как видишь, чтобы научиться находить реакции опор, главное — научиться правильно составлять уравнения равновесия.
Уравнение проекций
Запишем первое уравнение — уравнение проекций для оси x.
В уравнении будут участвовать только те силы, которые параллельны оси x. Такая сила у нас только одна — HA. Так как HA направлена против положительного направления оси x, в уравнение её нужно записать с минусом:
Тогда HA будет равна:
Поздравляю, первая реакция найдена!
Уравнения моментов
А теперь самое интересное…запишем уравнение моментов, относительно точки A, с учётом ранее рассмотренного правила знаков для моментов.
Так как сила F поворачивает ПО часовой стрелке, записываем её со знаком «МИНУС» и умножаем на плечо.
Так как сила RB поворачивает ПРОТИВ часовой стрелки, пишем её со знаком «ПЛЮС» и умножаем на плечо. И, наконец, всё это приравниваем к нулю:
Из полученного уравнения выражаем реакцию RB:

Вторая реакция найдена! Третья реакция находится аналогично, но только теперь уравнение моментов записываем относительно другой точки:

Проверка правильности найденных опорных реакций
Чем хороши задачи на определение реакций, так это тем, что правильность расчёта реакций легко проверить. Для этого достаточно составить дополнительное уравнение равновесия, подставить все численные значения и если сумма проекций сил или сумма моментов будет равна нулю, то и реакции, значит, найдены — верно, а если нет, то ищем ошибку.
Составим дополнительное уравнение проекций для оси y и подставим все численные значения:
Как видишь, реакции опор найдены правильно.
Определение реакций опор для балки с распределенной нагрузкой
Теперь рассмотрим балку, загруженную распределенной нагрузкой:

Перед тем как посчитать реакции опор, распределенную нагрузку нужно «свернуть» до сосредоточенной силы. Если умножить интенсивность q на длину участка, на которой действует нагрузка, получим силу Q. Сила Q будет находиться ровно посередине балки, как и сила F в нашем первом примере:

Подробно комментировать нахождение реакций в опорах здесь, не буду. Просто приведу решение:



Расчёт реакций для консольной балки
Давай рассмотрим теперь пример с жёсткой заделкой – консольную балку. Заодно посмотрим, как учесть силу, приложенную под углом (α = 30°).

Силу, направленную под определённым углом, нужно разложить на две составляющие – горизонтальную и вертикальную. А их значения найти из силового треугольника:


Покажем реакции в заделке и выполним расчёт:

Для этой задачи выгоднее использовать другую форму условий равновесия:

А выгодна она тем, что из каждого записанного уравнения будем сразу находить реакцию:

Не пугайся отрицательного значения реакции! Это значит, что при указании реакции, мы не угадали с её направлением. Расчёт же показал, что MA, направлена не по часовой стрелке, а против.
В теоретической механике, когда реакции получают с «минусом» обычно не заморачиваются и не меняют их направление на схеме, так и оставляют в ответе отрицательное значение, оговаривая, что да реакция найдена, но с учётом знака, на самом деле направлена в другую сторону. Потому что найденные реакции в задачах на статику, являются конечной точкой расчёта.
У нас же, в сопромате после нахождения опорных реакций, всё только начинается. Найдя реакции, мы всего лишь находим ВСЕ силы действующие на элемент конструкции, а дальше по сценарию стоит задача определить внутренние усилия, возникающие в этом элементе, расчёты на прочность и т. д. Поэтому на схеме, обязательно следует указывать истинное направление реакций. Чтобы потом, когда будут рассчитываться внутренние усилия ничего не напутать со знаками.
Если получили отрицательное значение, нужно отразить это на схеме:

С учётом изменений на схеме реакция будет равна:
Сделаем проверку, составив уравнение равновесие, ещё не использованное – сумму моментов относительно, скажем, точки B, которая, при правильном расчёте, конечно, должна быть равна нулю:
![]()
Если не менять направление реакции, то в проверочном уравнении нужно учесть этот «минус»:

Можешь посмотреть еще один пример, с похожей схемой, для закрепления материала, так сказать.
Реакции опор для плоской рамы
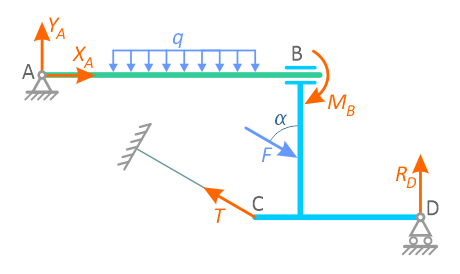
Теперь предлагаю выполнить расчёт плоской рамы. Для примера возьмём расчётную схему, загруженную всевозможными видами нагрузок:

Проводим ряд действий с расчетной схемой рамы:
- заменяем опоры на реакции;
- сворачиваем распределенную нагрузку до сосредоточенной силы;
- вводим систему координат x и y.

Выполняем расчёт реакций опор:


Меняем направление реакции RA:

В итоге получили следующие реакции в опорах рамы:

Осталось проверить наши расчеты! Для этого предлагаю записать уравнение моментов, относительно точки B. И если, эта сумма будет равна нулю, то расчет выполнен верно:

Как видим, расчет реакций выполнен правильно!
Связями называют тела, ограничивающие свободу перемещения рассматриваемого тела.
Реакции связей — это усилия, с которыми связи действуют на данное тело.
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными.
Рассмотрим реакции связей основных типов, встречающихся при решении задач: гладкой поверхности, ребра, гибкой нити, стержня, шарнирных опор и заделок, а также примеры замены связей их реакциями.
Реакции гладкой поверхности и ребра
Ниже приведены примеры замены связей гладкой поверхности и ребра их реакциями.
На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.
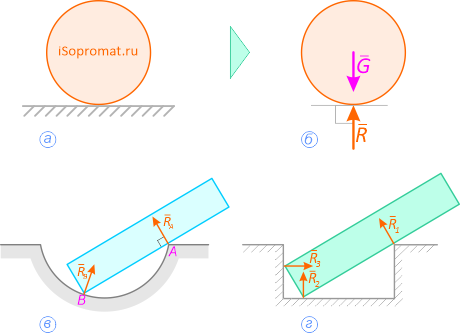
а – тело весом G на гладкой поверхности;
б – действие поверхности заменено реакцией – силой R;
в – в точке А связь «опорная точка» или ребро;
г – реакции направлены перпендикулярно
опираемой или опирающейся плоскостям
Рисунок 1.1
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1).
Реакции связей нити и стержня
Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль самого троса (нити, цепи, стержня) (рисунок 1.2).
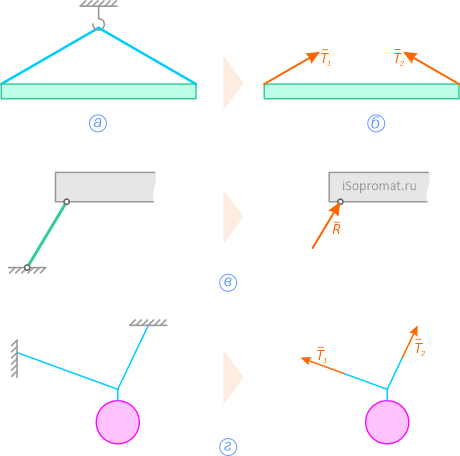
а – балка висит на двух тросах;
б – действие тросов заменено силами Т1 и Т2;
в – связь «идеальный стержень»;
г – связь «идеальная нить»
Рисунок 1.2
Реакции связей шарнирных опор
Шарнирные опоры допускают вращение относительно шарнира, поэтому в них не возникает вращающий момент.
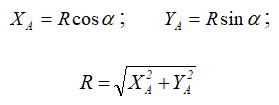
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3,а или 1.3,б). Она может быть заменена либо силой R с углом α (рисунок 1.3,в), либо двумя силами, например, XA и YA (рисунок 1.3,г).

Рисунок 1.3
Всегда можно перейти от R и α к XA и YA (и наоборот):
Шарнирно-подвижная опора (рисунок 1.4,а, б, в) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное.
Реакция R может быть направлена только по нормали к опорной поверхности (рисунок 1.4, г).
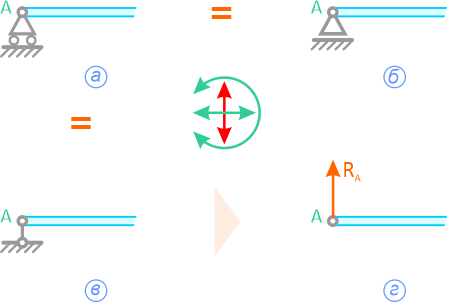
Рисунок 1.4
В следующем примере, связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рисунок 1.5, б), а их действие заменено силами XA, YA и RB.
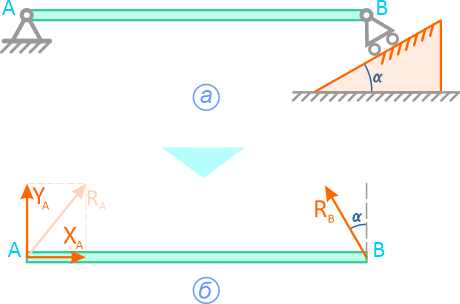
Рисунок 1.5
Подробнее про связи и реакции связей смотрите в нашем видео:
Другие видео
Реакции связи в заделках
Все виды заделок исключают поворот, поэтому в них всегда возникает связь «момент».
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросив втулку – получаем действие на стержень силы RD и момента MD.
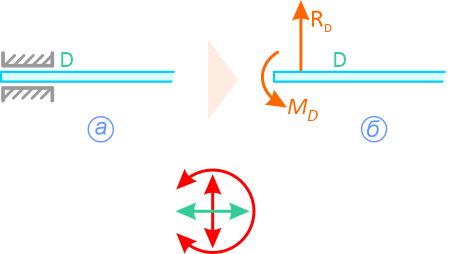
Рисунок 1.6
На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет только момент MC (рисунок 1.7, б).
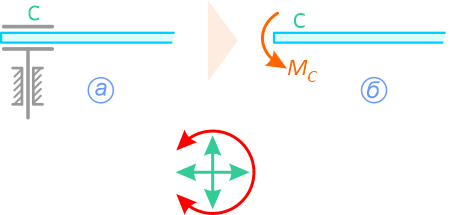
Рисунок 1.7
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
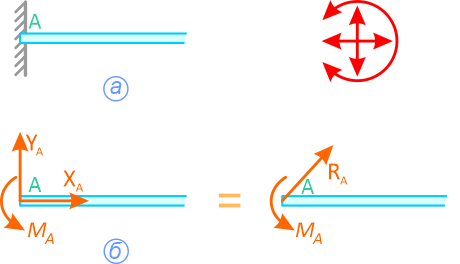
Рисунок 1.8
Реакции пространственных связей
Трехмерная шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменяется системой сил (рисунок 1.9, б) XA, YA и ZA, т.е. силой, неизвестной по величине и направлению.
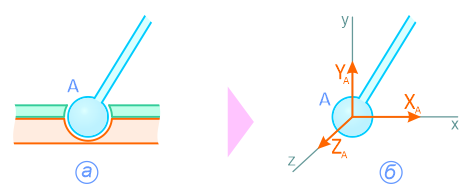
Рисунок 1.9
На рисунке 1.10, а показан вал с колесом, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рисунок 1.10, б).
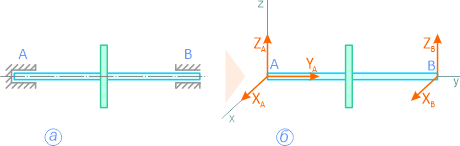
Рисунок 1.10
На следующих рисунках показаны примеры замены различных типов связей их реакциями.
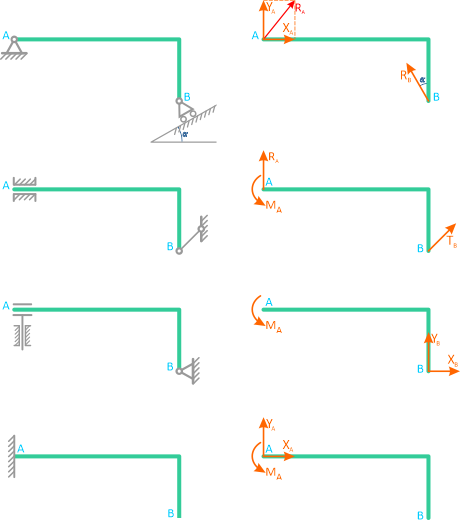
Рисунок 1.11
Трехмерная система удерживаемая в равновесии тремя типами связей: скользящей заделкой, шарнирно неподвижной опорой и тросом.
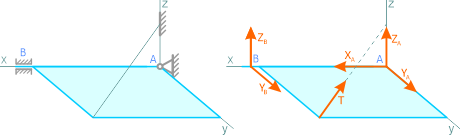
Рисунок 1.12
В общем случае пространственного нагружения, в глухой заделке может возникать до шести реакций связей: три силы и три момента.
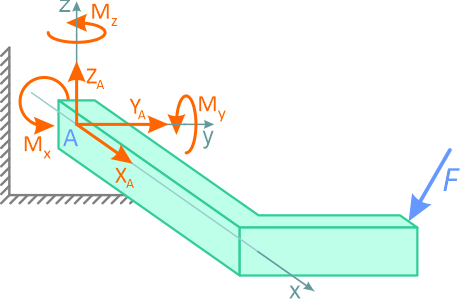
Рисунок 1.13
Величина и истинное направление сил реакций связей определяются из уравнений равновесия рассматриваемой системы.
Для плоской системы сил составляется 3 уравнения
Для пространственной системы — до шести уравнений статики.
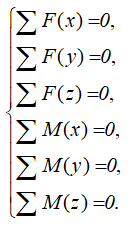
Из которых выражаются и рассчитываются искомые реакции.
Пример определения сил реакций связей
Задача
Жесткая рама закреплена в точке A шарнирной связью, а в точке B удерживается в состоянии статического равновесия опорой на катках, с упором в наклонную плоскость под углом 30°.
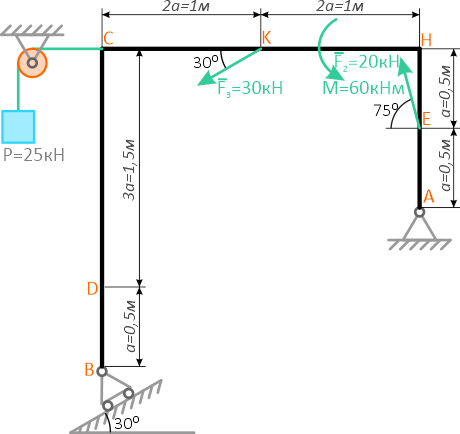
В точке C к раме привязан трос, перекинутый через блок и несущий на конце груз весом P=25кН.
На раму действует пара сил с моментом M=60кНм и две силы F2 и F3 приложенные в точках K и E и расположенные под углами 30° и 75° к горизонтальной оси.
Требуется определить реакции связей в точках A и B, вызываемые заданными действующими нагрузками.
При расчетах, принять размер a=0,5м.
Решение
Рассмотрим равновесие рамной пластины.
Проведем координатные оси x-y и изобразим действующие на пластину внешние нагрузки: силы F, пару сил с моментом M, натяжение троса T (по модулю T=P) и реакции связей XA, YA, RB.
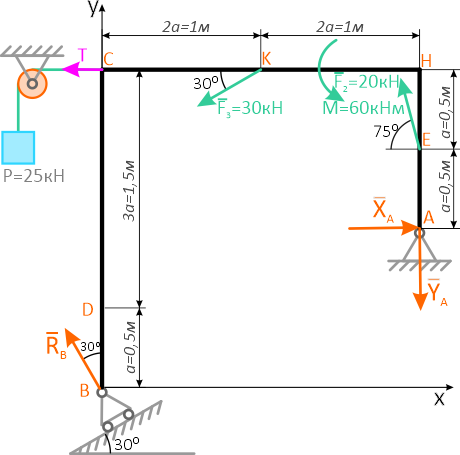
Реакцию неподвижной шарнирной опоры A изображаем двумя составляющими её связями. Реакция на катке направлена перпендикулярно опорной плоскости.
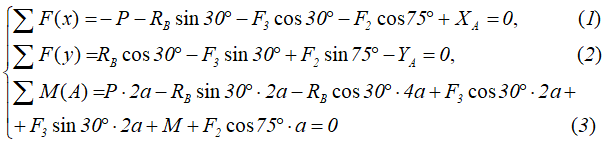
Для полученной плоской системы сил составим три уравнения равновесия системы.
При вычислении моментов сил F относительно точки A воспользуемся теоремой Вариньона, т.е. разложим силы на составляющие Fx=Fcosα и Fy=Fsinα и учтём что mA(F)=mA(Fx)+mA(Fy).
Запишем уравнения сумм проекций сил на оси x и y, а также суммы моментов относительно любой точки системы, например, точки A.
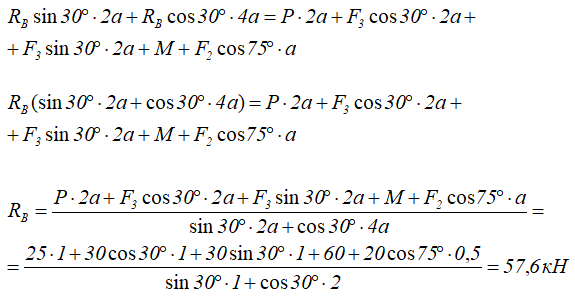
Решая полученную систему уравнений, определяем неизвестные реакции связей катка и шарнирно-неподвижной опоры.
Из уравнения (3) находим реакцию катка
Из уравнения (1) горизонтальную реакцию в точке A

Из уравнения (2) — вертикальную.

Положительные значения найденных реакций говорят о том, что направление связей было выбрано, верно.
Проверку можно выполнить, составив уравнение суммы моментов, в котором будут записаны все искомые реакции, например, относительно точки D:
Ноль, полученный в ответе, означает правильность составления и решения уравнений
Ответ: Получены следующие значения сил реакций связей: в катке RB=57,6кН, в шарнирной опоре XA=84,96кН и YA=54,2кН.
Другие примеры решения задач >
Проекция силы на ось >
В задачах статики почти всегда приходится рассматривать равновесие несвободного тела, то есть тела, так или иначе закрепленного или имеющего ту или иную опору. В зависимости от вида или типа опоры можно указать следующие основные типы связей:
– гладкая поверхность (без трения);
– гладкий выступ;
– гибкая невесомая нить;
– невесомый стержень с шарнирно закрепленными концами;
– подвижный шарнир без трения (каток);
– неподвижный шарнир.
Рассмотрим каждый тип реакций связей подробнее.
Гладкая поверхность
Пусть тело опирается на гладкую поверхность и соприкасается с ней в некоторой точке. Реакция гладкой поверхности приложена в точке касания и направлена по нормали к поверхности. Обычно такие силы называются нормальными силами или нормальными реакциями опоры и обозначаются буквой  или
или  .
.
На рис.С.6. приведены примеры реакции гладкой поверхности.

Пусть балка DE опирается в точке D о гладкую поверхность, а в точке E о гладкий выступ. Реакция гладкой поверхности приложена в точке касания и направлена по нормали к поверхности, в то время как реакция гладкого выступа приложена в точке опоры балки и направлена по нормали к оси балки.
Гибкая невесомая нить
Пусть некоторый груз весом  подвешен на гибкой нерастяжимой и невесомой нити. Связь, осуществленная в виде гибкой нерастяжимой нити, не дает грузу удаляться от точки крепления нити к грузу. В этом случае реакция гибкой нерастяжимой и невесомой нити приложена к точке крепления нити к телу D и направлена вдоль нити (рис.С.8). Реакцию связи нити иногда называют натяжением нити и обозначают буквой
подвешен на гибкой нерастяжимой и невесомой нити. Связь, осуществленная в виде гибкой нерастяжимой нити, не дает грузу удаляться от точки крепления нити к грузу. В этом случае реакция гибкой нерастяжимой и невесомой нити приложена к точке крепления нити к телу D и направлена вдоль нити (рис.С.8). Реакцию связи нити иногда называют натяжением нити и обозначают буквой  . В точке А реализуется опирание на гладкую поверхность без трения с реакцией
. В точке А реализуется опирание на гладкую поверхность без трения с реакцией  .
.

Невесомый прямолинейный стержень с шарнирно закрепленными концами
Пусть груз Q весом закреплен в точке В прямолинейным невесомым стержнем. Трением в шарнирах можно пренебречь. Реакция невесомого стержня с шарнирно закрепленными концами приложена к точке крепления стержня с грузом и направлена по оси стержня.
Если стержень под действием нагрузки подвергается растяжению, то реакция стержня направлена в сторону, указанную на рис.С.9а. Если стержень под действием нагрузки подвергается сжатию, то реакция стержня направлена в сторону, указанную на рис.С.9б.
При решении задач, в которых связью служит невесомый стержень с шарнирно закрепленными концами, вначале указываем предположительное направление силы . Если после решения задачи окажется, что числовое значение реакции  , т.е. проекция реакции связи на направление
, т.е. проекция реакции связи на направление  положительно, то это означает, что сила направлена на чертеже правильно.
положительно, то это означает, что сила направлена на чертеже правильно.

Если после решения задачи окажется, что числовое значение реакции  , т.е. проекция реакции связи на направление отрицательно, то это означает, что сила направлена на чертеже в противоположную сторону.
, т.е. проекция реакции связи на направление отрицательно, то это означает, что сила направлена на чертеже в противоположную сторону.
Подвижный шарнир без трения (каток)
Пусть тело весом опирается точкой С на подвижный каток, который может перемещаться по гладкой плоской поверхности (рис.С.10).
Поскольку данная опора допускает возможность перемещения по направлению поверхности , то в этом направлении отсутствует компонента реакции шарнира.

Таким образом, реакция подвижного шарнира  , как показано на рис.С.10, приложена в точке
, как показано на рис.С.10, приложена в точке  и направлена по нормали к поверхности перемещения катка .
и направлена по нормали к поверхности перемещения катка .
Неподвижный шарнир
Пусть тело  весом опирается точкой D на неподвижный шарнир (рис.С.11). Реакция неподвижного шарнира приложена в точке касания тела D с осью шарнира. Направление реакции неподвижного шарнира заранее неизвестно.
весом опирается точкой D на неподвижный шарнир (рис.С.11). Реакция неподвижного шарнира приложена в точке касания тела D с осью шарнира. Направление реакции неподвижного шарнира заранее неизвестно.
При решении задач реакцию неподвижного шарнира обычно раскладывают на две составляющие, соответствующие проекциям на оси координат. При этом могут быть случаи, когда реакцию неподвижного шарнира удобнее раскладывать по другим направлениям.
Составляющие реакции неподвижного шарнира обычно обозначают символами  и
и  .
.
Направления каждой из составляющих реакции неподвижного шарнира обычно заранее неизвестно, поэтому, как показано на рис.С.11, при решении задач вначале указывают предполагаемые направления составляющих реакции шарнира.

Если после решения задачи окажется, что проекция силы реакции  и
и  то это означает, что обе составляющие на чертеже указаны правильно. В противном случае, проекция составляющей реакции, имеющей отрицательный знак, должна быть направлена в противоположную сторону.
то это означает, что обе составляющие на чертеже указаны правильно. В противном случае, проекция составляющей реакции, имеющей отрицательный знак, должна быть направлена в противоположную сторону.
В точке Е реализуется свободное опирание балки с реакцией  .
.
Пример.
Брус DE закреплен в точке D неподвижным шарниром, а в точке Е опирается на гладкую поверхность стены (рис.С.12а).

Для бруса DE связями служат два тела: неподвижный шарнир D и гладкая поверхность стены.
Раскладываем реакцию неподвижного шарнира на две составляющие  и
и  и показываем на чертеже предполагаемые направления этих составляющих.
и показываем на чертеже предполагаемые направления этих составляющих.
Реакция гладкой стены приложена в точке Е касания балки и стены и направлена по нормали к стене (рис.С.12б).
На рис.С.13 приведен также пример использования опирания на неподвижный шарнир и гладкий выступ.

Таковы основные типы опор и их реакций.
Основной вид задач в разделе статика – это определение реакций опор. Есть много видов опор, но мы рассмотрим три основные которые и встречаются при решении задач.
ЗАКАЗАТЬ ПОМОЩЬ
Шарнирно подвижная опора
Такая опора имеет связь только в одном направлении (сила R показывает направление ограничения движения), возможно вращение в шарнире и движение вдоль одной из осей. Шарнирно подвижная опора имеет два вида схемотческих изображений на рисунках А и Б показаны виды изображения.

Шарнирно неподвижная опора
У данного вида опоры две реакции связи (обозначены R и Ха), возможно вращение только в шарнире, освые перемещения не возможны.
Пример схематического изображения шарнирно неподвижной опоры:

Жесткая заделка
Данный вид опор не имеет степеней поэтому имеет три реакции: две осевых и один реактивный момент. Такую опору еще называют консольной.

Определение реакций опор
Для определения реакций опор используют три уравнения статики и правило моментов. Самое интересное что правило моментов для термеха отличается от правила моментов в сопромате. Если в термехе момент по часовой стрелке считается со знаком “-“, то в сопромате по часовой это знак “+”.
Три уравнения статики
1) Сумма сил по оси Х
2) Сумма сил по оси У
3) Сумма моментов вокруг точки
Рассмотрим на примере определение реакций опор в двухопорной балке:

Рассмотрим балку: балка на двух опорах, опора “А” шарнирно неподвижная, следовательно в ней возникает две реакции опоры по оси У и по оси Х, опора “В” шарнирно подвижная, в ней возникает одна реакции в вертикальной плоскости Уа. Всего получается три неизвестных следовательно балка статически определима и для определения нам достаточно трёх уравнений статики.
По оси Х нет действующих сил, следовательно реакция Ха=0
Для определения реакции опоры “В” составим уравнение моментов вокруг точки “А”. Вокруг точки “А” действуют три момента – это сила F умноженная на плечо (знак минус т.к. вращает по часовой стрелке), момент М который (вращает против часовой стрелки следовательно знак “+”) и реакция Rb умноженная на плечо (направить можно в любую сторону, направим вверх, если получится со знаком “+” значит направили верно, если со знаком “-” начальное направление нужно направить в противоположную сторону). Составим уравнение и выразим Rb.

Для определения вертикальной реакции опоры А воспользуемся уравнением суммы сил по оси У:

Реакции опор определены!!!
1. Гладкая (без
трения) опорная поверхность.
Такая связь препятствует движению тела
в одном направлении. Реакция
![]() гладкой поверхности направлены всегда
гладкой поверхности направлены всегда
по общей нормали к поверхности тела и
поверхности связи в их точке касания
(рис. 6).
|
Рис. 6 |
Рис. |


2. Гибкая связь.
Реакции гибких связей всегда направлены
вдоль самих связей к точке их подвеса
(рис. 7).
3. Неподвижный
цилиндрический шарнир (неподвижная
шарнирная опора).
Тело может только вращаться вокруг оси
шарнира, перпендикулярной плоскости
рисунка (рис. 8).

Рис. 8
Реакция RA
проходит через ось шарнира и может иметь
любое направление в плоскости. При
решении задач целесообразно заменить
ее составляющими RAX
и RAY.
4. Подвижная
шарнирная опора. Реакция
такой опоры направлена по нормали к
опорной поверхности (рис. 9).

Рис. 9
5. Стержень.
Стержень
– прямолинейный невесомый элемент с
двумя шарнирами на концах. При отсутствии
нагрузки по его длине реакция стержня
направлена вдоль его оси (рис. 10).
|
Рис.10 |
Рис.11 |


6. Шаровой шарнир
(рис. 11). Этот
вид связи закрепляет какую-нибудь точку
тела так, что она не может совершать
линейных перемещений в пространстве,
при решении задач целесообразно заменить
эту силу ее составляющими RAX,
RAY,
RAZ.
7. Жесткая
заделка (неподвижное защемление). Такая
связь не допускает не только линейных
перемещений, но и поворота тела (рис.
12).

Рис. 12
Со стороны связи
на тело действует реакция RA
и момент MA
(момент реакции заделки или реактивный
момент). При решении задач рекомендуется
силу
![]() заменить ее составляющимиRAX
заменить ее составляющимиRAX
и MA.
Равновесие
несвободных тел изучается в статике на
основании аксиомы связей:
-всякое несвободное
тело можно рассматривать как свободное,
если отбросить связи и заменить их
действие соответствующими реакциями.
Например, элемент,
для которого связями являются
шарнирно-неподвижная опора А
и стержень ВС
(рис. 13,а), можно рассматривать как
свободное тело, находящееся в равновесии
под действием заданных сил и реакций
связей RAX,
RAY
и RB
(рис. 13,б). Значения этих реакций
определяются из условий равновесия.
 а)
а)
б)
Рис. 13
1.4. Плоская система сходящихся сил
Система си, линии
действия которых пересекаются в одной
точке, называется системой сходящихся
сил (рис. 14,а.)

а)
б) в)
Рис. 14
Продолжив линии
действия заданных сил до пересечения,
перенесем точки приложения сил в точку
пересечения (рис. 14,б).
Используя
последовательно правило параллелограмма,
получим:
![]() ;
;
![]() .
.
В общем случае
(для n
сил):
![]() .
.
Таким образом,
система сходящихся сил приводится к
равнодействующей, равной их векторной
сумме и проходящей через точку их
пересечения.
Равнодействующую
можно определить графически с помощью
векторного (силового многоугольника
(рис. 14,в). Для этого последовательно в
выбранном масштабе откладываются
векторы заданных сил. Равнодействующей
системы сил является вектор, соединяющий
начало первого вектора с концом
последнего.
Равнодействующую
можно также определить аналитическим
способом. Проекция силы на ось (рис.
15,а) определяется произведением модуля
силы на косинус угла между направлением
силы и направлением оси.
На рис. 15,б показан
многоугольник сил. Из рисунка видно,
что
![]() ,
,
где ![]() ;
;
![]() ,
,
…., ![]() .
.

а)
б)
Рис. 15
Аналогичные
соотношения можно записать и для оси
Y.
Т.е. проекция
равнодействующей на какую-либо ось
равна сумме проекций составляющих сил
на ту же ось:
![]() ,
,
![]() (4)
(4)
Равнодействующая
определяется так:
![]() (5)
(5)
где
![]() ,
,![]() – единичные векторы – орты.
– единичные векторы – орты.
Модуль равнодействующей
равен
![]() (6)
(6)
Направление вектора
равнодействующей определяется с помощью
направляющих косинусов – косинусов
углов между равнодействующей и осями
x,
y:
![]() ,
,
![]() (7)
(7)
