Резонанс
При заданных возмущающей силе Fmax.возм
и коэффициенте трения β амплитуда Ym является функцией только угловой частоты возмущающей силы.
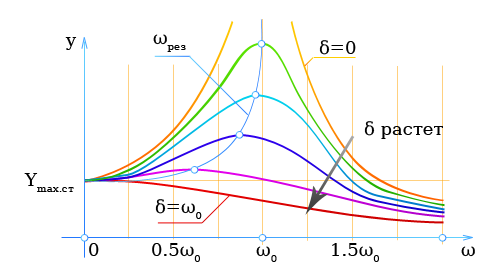
На рисунке показана зависимость Ym от ω (резонансная кривая).
Параметром служит коэффициент затухания δ.
При ω ≈ ω0 она достигает особенно большого значения (резонанс).
При самых малых значениях δ величина Ym резко возрастает.
Если δ > 0, то в случае резонанса ω < ω0; величина Ymax.ст представляет собой статическое отклонение системы под действием постоянной силы Ymax.возм (ω = 0).
Для определения резонансной частоты необходимо найти максимум функции Ym = Ym(ω) и приравнять первую производную нулю; тогда, если
| ωрез | резонансная частота, при которой амплитуда максимальна, | радиан/сек |
|---|---|---|
| ω0 | частота собственных незатухающих колебаний системы, | радиан/сек |
| m | масса колебательной системы, | кг |
| β | коэффициентом вязкого трения, | кг/сек |
| δ | коэффициентом затухания, | радиан/сек |
Частота резонанса
[
ω_{рез} = sqrt{ω_{0}^2 – frac{β^2}{2m^2}} = sqrt{ω_{0}^2 – 2δ^2}
]
Условие отсутствия резонанса
[
δ geqslant frac{ω_{0}}{sqrt{2}}
]
Амплитуда резонанса
Чтобы найти величину амплитуды в резонансном случае, нужно подставить формулу (1) в формулу отклонения при вынужденных колебаниях.
Если
| Ymax.рез | резонансная амплитуда колебаний системы, | метр |
|---|---|---|
| Fmax.возм | максимальное значение возмущающей силы, | Ньютон |
| m | масса колебательной системы, | кг |
| ωрез | резонансная частота, при которой амплитуда максимальна, | радиан/сек |
| ω0 | частота собственных незатухающих колебаний системы, | радиан/сек |
| ω | частота колебаний системы с затуханием, | радиан/сек |
| β | коэффициентом вязкого трения, | кг/сек |
| δ | коэффициентом затухания, | радиан/сек |
то имеем
[
Y_m = frac
{
F_{max.возм}
}
{
β sqrt{ ω_{0}^2 – frac{β^2}{4m^2} }
}
]
[
Y_m = frac{F_{max.возм}}{βω}
]
[
Y_m = frac{F_{max.возм}}{2δmω}
]
Согласно формуле, разность фаз α также зависит от частоты возмущающей силы.
Параметром служит коэффициент δ.
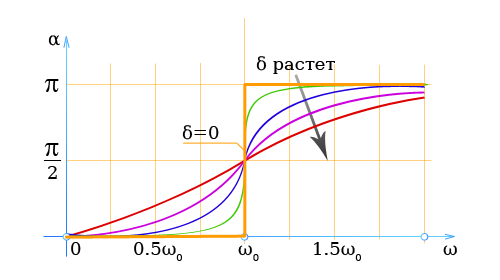
На рисунке представлена зависимость α от частоты.
Независимо от величины затухания при ω = ω0 разность фаз составляет
[
α = 90°
]
Резонанс играет большую роль в технике и в повседневной жизни. В большинстве механических устройств под действием внешних периодических сил могут возникать колебания. При резонансе происходит нарастание амплитуды колебаний, и это может привести к разрушениям («резонансная катастрофа»). В случае вращательного движения резонансную частоту называют критическим числом оборотов.
Резонанс |
стр. 558 |
|---|
Как найти резонансную частоту
Резонансная частота любого колебания равна его собственной частоте. С этой частотой и действуйте на колебательную систему для достижения резонанса. Чтобы найти резонансную частоту математического маятника, измерьте его длину, затем произведите соответствующие вычисления. Подобным образом находится резонансная частота пружинного маятника, струны и колебательного контура.

Вам понадобится
- линейка или рулетка, весы, динамометр, прибор для измерения электроемкости и индуктивности.
Инструкция
Определение резонансной частоты математического и пружинного маятникаВозьмите математический маятник (небольшое по размерам тело на сравнительно длинной нити) и линейкой или рулеткой измерьте длину нити. После этого число 9,81 (значение ускорения свободного падения), поделите на длину нити маятника в метрах, из полученного числа извлеките квадратный корень и результат поделите на 6,28. Ответом будет резонансная частота математического маятника.Для измерения резонансной частоты пружинного маятника измерьте массу груза на нем с помощью весов и узнайте жесткость пружины. Поделите значение жесткости пружины на массу груза, извлеките из результата квадратный корень и поделите число 6,28. Получите резонансную частоту пружинного маятника.Действуя на маятник внешним колебанием рассчитанной частоты, можно добиться резонанса (увеличения амплитуды колебаний).
Резонансная частота струныНайдите массу струны с помощью чувствительных весов в килограммах. Затем натяните ее на инструменте, замерив с помощью динамометра силу ее натяжения в ньютонах. Линейкой или рулеткой измерьте ее длину. Для расчета резонансной частоты силу натяжения поделите на массу струны и ее длину. Из получившегося числа извлеките квадратный корень, а результат поделите на 2.Если струну натянуть на резонатор с такой же собственной частотой, громкость звука значительно увеличится.
Резонансная частота колебательного контураИзмерьте индуктивность катушки и электроемкость колебательного контура. Для этого используйте универсальный прибор с соответствующими настройками. Перемножьте значения электроемкости и индуктивности, из полученного числа извлеките квадратный корень, а результат поделите на 6,28.Присоединив к данному контуру колебательный контур с резонансной частотой, можно добиться значительного увеличения амплитудных значений силы тока.
Видео по теме
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
A resonant frequency is the natural vibrating frequency of an object and is usually denoted as a f with a subscript zero (f0). This type of resonance is found when an object is in equilibrium with acting forces and could keep vibrating for a long time under perfect conditions. One example of a resonance frequency is seen when pushing a child on a swing. If you pull back and let it go it will swing out and return at its resonant frequency. A system of many objects can have more than one resonance frequency.
Use the formula
f_0=frac{1}{2pi}sqrt{frac{k}{m}}
to find a resonance frequency of a spring. “π” is a long number, but for calculation purposes, it can be rounded down to 3.14. The letter “m” stands for the mass of the spring, whereas “k” represents the spring constant, which can be given in a problem.
Use the formula v = λf to find the resonance frequency of a single continuous wave. The letter “v” stands for the wave velocity, whereas “λ” represents the distance of the wavelength. This formula states that the wave velocity equals the distance of the wavelength multiplied by the resonance frequency. In manipulating this equation, resonance frequency equals wave velocity divided by the distance of the wavelength.
Use another set of formulas to find multiple resonance frequencies for different waves moving at the same time. The resonance frequency of each vibration can be found using the formula
f_n=frac{v}{lambda_n}=frac{nv}{2L}
The term λn stands for the wavelength of the nth frequency, and L is the length of the string.
Basically, this formula states the resonance frequency is equal to the wave velocity divided by the distance of the wavelength multiplied by the resonance frequency number the user is calculating for. This formula also equals the resonance frequency number the user is calculating for multiplied by the velocity then divided by two multiplied by the length of the wave.
Слово «Резонанс» имеет и другие значения.
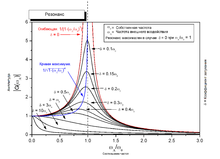
Эффект резонанса для разных частот внешнего воздействия и коэффициентов затухания

Раскачивание человека на качелях — типичный пример резонанса. Нагруженное колебание, маятник, имеет собственную частоту колебаний, свою резонансную частоту и сопротивляется давлению с большей или меньшей скоростью.
Резона́нс (фр. resonance, от лат. resono «откликаюсь») — частотно-избирательный отклик колебательной системы на периодическое внешнее воздействие, который проявляется в резком увеличении амплитуды стационарных колебаний при совпадении частоты внешнего воздействия с определёнными значениями, характерными для данной системы[1].
Если потерь энергии нет, резонансу отвечают, формально, бесконечная амплитуда и равенство частоты воздействия 

Под действием резонанса колебательная система оказывается особенно отзывчивой на действие внешней силы. Степень отзывчивости в теории колебаний описывается величиной, называемой добротностью. При помощи резонанса можно выделить и/или усилить даже весьма слабые периодические колебания.
Явление резонанса впервые было описано Галилео Галилеем в 1602 г. в работах, посвященных исследованию маятников и музыкальных струн.[2][3]
Механика[править | править код]


Школьный резонансный массовый эксперимент
Наиболее известная большинству людей механическая резонансная система — это обычные качели. Если подталкивать качели в определённые моменты времени в соответствии с их резонансной частотой, размах движения будет увеличиваться, в противном случае движения будут затухать. Резонансную частоту такого маятника с достаточной точностью в диапазоне малых смещений от равновесного состояния можно найти по формуле:
,
где g — это ускорение свободного падения (9,8 м/с² для поверхности Земли), а L — длина от точки подвешивания маятника до центра его масс. (Более точная формула довольно сложна и включает эллиптический интеграл.) Важно, что резонансная частота не зависит от массы маятника. Также важно, что раскачивать маятник нельзя на кратных частотах (высших гармониках), зато это можно делать на частотах, равных долям от основной (низших гармониках).
Резонансные явления могут приводить как к разрушению, так и к увеличению устойчивости механических систем.
В основе работы механических резонаторов лежит преобразование потенциальной энергии в кинетическую и наоборот. В случае простого маятника, вся его энергия содержится в потенциальной форме, когда он неподвижен и находится в верхних точках траектории, а при прохождении нижней точки на максимальной скорости, она преобразуется в кинетическую. Потенциальная энергия пропорциональна массе маятника и высоте подъёма относительно нижней точки, кинетическая — массе и квадрату скорости в точке измерения.
Другие механические системы могут использовать запас потенциальной энергии в различных формах. Например, пружина запасает энергию сжатия, которая, фактически, является энергией связи её атомов.
Струна[править | править код]
Струны таких инструментов, как лютня, гитара, скрипка или пианино, имеют основную резонансную частоту, напрямую зависящую от длины, массы и силы натяжения струны. Длина волны первого резонанса струны равна её удвоенной длине. При этом, её частота зависит от скорости v, с которой волна распространяется по струне:

где L — длина струны (в случае, если она закреплена с обоих концов). Скорость распространения волны по струне зависит от её натяжения T и массы на единицу длины ρ:

Таким образом, частота главного резонанса может зависеть от свойств струны и выражается следующим отношением:
,
где T — сила натяжения, ρ — масса единицы длины струны, а m — полная масса струны.
Увеличение натяжения струны и уменьшение её массы (толщины) и длины увеличивает её резонансную частоту. Помимо основного резонанса, струны также имеют резонансы на высших гармониках основной частоты f, например, 2f, 3f, 4f[4], и т. д. Если струне придать колебание коротким воздействием (щипком пальцев или ударом молоточка), струна начнёт колебания на всех частотах, присутствующих в воздействующем импульсе (теоретически, короткий импульс содержит все частоты). Однако частоты, не совпадающие с резонансными, быстро затухнут, и мы услышим только гармонические колебания, которые и воспринимаются как музыкальные ноты.
Электроника[править | править код]
В электрических цепях резонансом называется такой режим пассивной цепи, содержащий катушки индуктивности и конденсаторы, при котором ее входное реактивное сопротивление или ее входная реактивная проводимость равны нулю. При резонансе ток на входе цепи, если он отличен от нуля, совпадает по фазе с напряжением.
В электрических цепях резонанс возникает на определённой частоте, когда индуктивная и ёмкостная составляющие реакции системы уравновешены, что позволяет энергии циркулировать между магнитным полем индуктивного элемента и электрическим полем конденсатора.
Механизм резонанса заключается в том, что магнитное поле индуктивности генерирует электрический ток, заряжающий конденсатор, а разрядка конденсатора создаёт магнитное поле в индуктивности — процесс, который повторяется многократно, по аналогии с механическим маятником.
Электрическое устройство, состоящее из ёмкости и индуктивности, называется колебательным контуром. Элементы колебательного контура могут быть включены как последовательно (тогда возникает резонанс напряжений), так и параллельно (резонанс токов). При достижении резонанса, импеданс последовательно соединённых индуктивности и ёмкости минимален, а при параллельном включении — максимален. Резонансные процессы в колебательных контурах используются в элементах настройки, электрических фильтрах. Частота, на которой происходит резонанс, определяется величинами (номиналами) используемых элементов. В то же время, резонанс может быть и вреден, если он возникает в неожиданном месте по причине повреждения, недостаточно качественного проектирования или производства электронного устройства. Такой резонанс может вызывать паразитный шум, искажения сигнала, и даже повреждение компонентов.
Приняв, что в момент резонанса индуктивная и ёмкостная составляющие импеданса равны, резонансную частоту можно найти из выражения
,
где 
В электронных устройствах также применяются различные электромеханические резонансные системы.
СВЧ[править | править код]
В СВЧ электронике широко используются объёмные резонаторы, чаще всего цилиндрической или тороидальной геометрии с размерами порядка длины волны, в которых возможны добротные колебания электромагнитного поля на отдельных частотах, определяемых граничными условиями. Наивысшей добротностью обладают сверхпроводящие резонаторы, стенки которых изготовлены из сверхпроводника, и диэлектрические резонаторы с модами шепчущей галереи.
Оптика[править | править код]
В оптическом диапазоне самым распространенным типом резонатора является резонатор Фабри-Перо, образованный парой зеркал, между которыми в резонансе устанавливается стоячая волна. Применяются также кольцевые резонаторы с бегущей волной и оптические микрорезонаторы с модами шепчущей галереи.
Акустика[править | править код]
Резонанс — один из важнейших физических процессов, используемых при проектировании звуковых устройств, большинство из которых содержат резонаторы, например, струны и корпус скрипки, трубка у флейты, корпус у барабанов.
Для акустических систем и громкоговорителей резонанс отдельных элементов (корпуса, диффузора) является нежелательным явлением, так как ухудшает равномерность амплитудно-частотной характеристики устройства и верность звуковоспроизведения. Исключением являются акустические системы с фазоинвертором, в которых намеренно создаётся резонанс для улучшения воспроизведения низких частот.
Астрофизика[править | править код]
Орбитальный резонанс в небесной механике — это ситуация, при которой два (или более) небесных тела имеют периоды обращения, которые относятся как небольшие натуральные числа. В результате эти небесные тела оказывают регулярное гравитационное влияние друг на друга, которое может стабилизировать их орбиты.
См. также[править | править код]
- Резонатор
- Колебания
- Добротность
- Колебательный контур
- Диссипативная структура
- Оптический резонанс
- Антирезонанс
Примечания[править | править код]
- ↑ Резонанс // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — Москва: Большая Российская энциклопедия, 4. — С. 308. — 704 с. — ISBN 5-85270-087-8.
- ↑
Andrea Frova and Mariapiera Marenzana. Thus spoke Galileo: the great scientist’s ideas and their relevance to the present day (англ.). — Oxford University Press, 2006. — P. 133—137. — ISBN 978-0-19-856625-0. - ↑
Stillman Drake, Noel M. Swerdlow, and Trevor Harvey Levere. Essays on Galileo and the history and philosophy of science (англ.). — University of Toronto Press, 1999. — P. 41—42. — ISBN 978-0-8020-7585-7. - ↑ В реальных физических ситуациях (например, при колебаниях массивной и жесткой струны) часто́ты высших резонансных колебаний (обертонов) могут заметно отклоняться от величин, кратных частоте основного тона — такие обертоны называются негармоническими, см. также Кривые Рейлсбека.
Литература[править | править код]
- Richardson LF (1922), Weather prediction by numerical process, Cambridge.
- Bretherton FP (1964), Resonant interactions between waves. J. Fluid Mech., 20, 457—472.
- Бломберген Н. Нелинейная оптика, М.: Мир, 1965. — 424 с.
- Захаров В. Е. (1974), Гамильтонов формализм для волн в нелинейных средах с дисперсией, Изв. вузов СССР. Радиофизика, 17(4), 431—453.
- Арнольд В. И. Потеря устойчивости автоколебаний вблизи резонансов, Нелинейные волны / Ред. А. В. Гапонов-Грехов. — М.: Наука, 1979. С. 116—131.
- Kaup PJ, Reiman A and Bers A (1979), Space-time evolution of nonlinear three-wave interactions. Interactions in a homogeneous medium, Rev. of Modern Phys, 51(2), 275—309.
- Haken H (1983), Advanced Synergetics. Instability Hierarchies of Self-Organizing Systems and devices, Berlin, Springer-Verlag.
- Филлипс O.М. Взаимодействие волн. Эволюция идей, Современная гидродинамика. Успехи и проблемы. — М.: Мир, 1984. — С. 297—314.
- Журавлёв В. Ф., Климов Д. М. Прикладные методы в теории колебаний. — М.: Наука, 1988.
- Сухоруков А. П. Нелинейные волновые взаимодействия в оптике и радиофизике. — Москва: Наука, 1988. — 230 с. — ISBN 5-02-013842-8.
- Брюно А. Д. Ограниченная задача трёх тел. — М.: Наука, 1990.
- Широносов В. Г. Резонанс в физике, химии и биологии. — Ижевск: Издательский дом «Удмуртский университет», 2000. — 92 с.
- Резонанс // Музыкальная энциклопедия. — М.: Советская энциклопедия, 1978. — Т. 4. — С. 585—586. — 976 с.
Ссылки[править | править код]
- Демонстрация явления резонанса на примере вынужденных колебаний пружинного маятника
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания – это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания – это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия – это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела – это величина его наибольшего отклонения от положения равновесия.
Период колебаний 
Частота колебаний 

к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой 

")
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них – синус и косинус – являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на 
Гармонические колебания – это колебания, при которых координата зависит от времени по гармоническому закону:
")
Выясним смысл входящих в эту формулу величин.
Положительная величина 
Аргумент косинуса 



Величина называется 





Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)")
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину 
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае 


График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае 


График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
")
Теперь дифференцируем полученное равенство (4):
")
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем 

Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:

C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными 
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой 
к оглавлению ▴
Пружинный маятник.
Пружинный маятник – это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу 

Координате
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости 


Если 





Тогда соотношение (8) принимает вид:

или

Мы получили уравнение гармонических колебаний вида (6), в котором

Циклическая частота колебаний пружинного маятника, таким образом, равна:

Отсюда и из соотношения 

Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник – это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна 
Запишем для маятника второй закон Ньютона:

и спроектируем его на ось

Если маятник занимает положение как на рисунке (т. е.

Если же маятник находится по другую сторону от положения равновесия (т. е.

Итак, при любом положении маятника имеем:

Когда маятник покоится в положении равновесия, выполнено равенство 


или

Это – уравнение гармонических колебаний вида (6), в котором

Следовательно, циклическая частота колебаний математического маятника равна:

Отсюда период колебаний математического маятника:

Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания – это колебания, совершаемые системой под воздействием внешней силы ")
Предположим, что собственная частота колебаний системы равна 
=F_{0}cos omega t")
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты 



Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
