Ротор векторного поля. Формула Стокса

Ротор поля. Формула Стокса
Ротором (или вихрем) векторного поля

называется вектор, обозначаемый  и определяемый формулой
и определяемый формулой

Формулу (71.13) можно записать с помощью символического определителя в виде, удобном для запоминания:
Отметим некоторые свойства ротора.
- Если
 — постоянный вектор, то
— постоянный вектор, то  .
.  , где
, где  .
. , т. e. ротор суммы двух векторов равен сумме роторов слагаемых.
, т. e. ротор суммы двух векторов равен сумме роторов слагаемых.- Если
 — скалярная функция, а
— скалярная функция, а  — векторная, то
— векторная, то

Эти свойства легко проверить, используя формулу (71.13). Покажем, например, справедливость свойства 3:
Используя понятия ротора и циркуляции, векторного поля, запишем известную в математическом анализе (см. п. 58.4) формулу Стокса:

Левая часть формулы (71.14) представляет собой циркуляцию вектора по контуру  , т. е.
, т. е.  (см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора
(см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора  через поверхность
через поверхность  , ограниченную контуром (см. (71.3)), т. е.
, ограниченную контуром (см. (71.3)), т. е.
Следовательно, формулу Стокса можно записать в виде

Такое представление формулы Стокса называют ее векторной формой. В этой формуле положительное направление на контуре и выбор стороны у поверхности согласованы между собой так же, как в теореме Стокса.
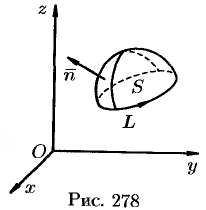
Формула (71.15) показывает, что циркуляция вектора вдоль замкнутого контура равна потоку ротора этого вектора через поверхность , лежащую в поле вектора и ограниченную контуром (натянутую на контур) (см. рис. 278).
Используя формулу (71.14), можно дать другое определение ротора поля, эквивалентное первому и не зависящее от выбора координатной системы.
Для этого применим формулу Стокса (71.15) для достаточно малой плоской площадки с контуром , содержащей точку  .
.
По теореме о среднем для поверхностного интеграла (п. 57.1, свойство 7) имеем:
где  — некоторая (средняя) точка площадки (см. рис. 279).
— некоторая (средняя) точка площадки (см. рис. 279).
Тогда формулу (71.15) можно записать в виде
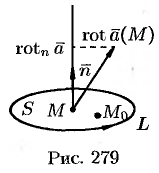
Пусть контур стягивается в точку . Тогда  , a
, a  . Перейдя к пределу, получаем:
. Перейдя к пределу, получаем:
Ротором вектора в точке называется вектор, проекция которого на каждое направление равна пределу отношения циркуляции вектора по контуру плоской площадки , перпендикулярной этому направлению, к площади этой площадки.
Как видно из определения, ротор вектора есть векторная величина, образующая собственное векторное поле.
Дадим физическое истолкование понятия ротора векторного поля. Найдем ротор ноля линейных скоростей твердого тела, вращающегося вокруг оси  с постоянной угловой скоростью (пример 69.2)
с постоянной угловой скоростью (пример 69.2)  , т. е. ротор вектора
, т. е. ротор вектора  .
.
По определению ротора
Ротор этого поля направлен параллельно оси вращения, его модуль равен удвоенной угловой скорости вращения.
С точностью до числового множителя ротор поля скоростей  представляет собой угловую скорость вращения твердого тела. С этим связано само название «ротор» (лат. «вращатель»).
представляет собой угловую скорость вращения твердого тела. С этим связано само название «ротор» (лат. «вращатель»).
Замечание. Из определения (71.13) ротора вытекает, что направление ротора — это направление, вокруг которого циркуляция имеет наибольшее значение (плотность) по сравнению с циркуляцией вокруг любого направления, не совпадающего с нормалью к площадке .
Так что связь между ротором и циркуляцией аналогична связи между градиентом и производной по направлению (см. п. 70.3).
На этой странице размещён полный курс лекций с примерами решения по всем разделам высшей математики:
Другие темы по высшей математике возможно вам они будут полезны:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Циркуляция векторного поля. Ротор вектора. Теорема Стокса
Содержание:







По этой ссылке вы найдёте полный курс лекций по математике:
Пусть в некоторой области G задано непрерывное векторное поле а ) к и замкнутый ориентированный контур L. Определение 1. Циркуляцией вектора а по замкнутому контуру L называется криволинейный интеграл 2-го рода от оектора а по контуру L Здесь dr — вектор, длина которого равна дифференциалу дуги L, а направление совпадаете направлением касательной к L, оп- Рис. 31 ределяемымориентацией контура (рис. 31); символ f означает, что интеграл берется по зам1«угому контуру L. ь
Пример 1. вычислить циркуляцию векторного поля вдоль эллипса L: По определению циркуляции имеем Параметрические уравнения данного эллипса имеют вид: , и, значит, . Подставляя эти выражения в формулу (2), найдем Циркуляция векторного поля. Ротор вектора Теорема Стокса Ротор (вихрь) векторного поля Инвариантное определение ротора поля Физический смысл ротора поля Правила вычисления ротора 8.1.
Ротор (вихрь) векторного поля Рассмотрим поле вектора Р, Q, R которого непрерывны и имеют непрерывные частные производные первого порядка по всем своим аргументам. Огределенив 2. Ротором вектора »(М) называется вектор, обозначаемый символом rot а и определяемый равенством или, в символической, удобной для запоминания форме, Этот определитель раскрывают по элементам первой строки, при этом операции умножения элементов второй строки на элементы третьей строки понимаются как операции дифференцирования, например,
Определение 3. Если в некоторой области G имеем rot а = 0, то поле вектора а в области G называете я безвихревым. Пример 2. Найти ротор вектора 4 Согласно формуле (3) имеем Так как rot а — вектор, то мы можем рассматривать векторное поле — поле ротора вектора а. Предполагая, что координаты вектора а имеют непрерывные частные производные второго порядка, вычислим дивергенцию вектора rot а. Получим Таким образом, поле вектора rot а соленоида л ьно.
Теорема 7 (Стокса). Циркуляция вектора а вдоль ориентированного замкнутого контура L равна потоку ротора этого вектора через любую поверхность Е, натянутую на контур L, При этом предполагается, что координаты вектора а имеют непрерывные частные производные в некоторой области G пространства, содержащей поверхность Е, и что ориентация орта нормали п° к поверхности ЕС G согласована с ориентацией контура L так, что из конца нормши обход контура в заданном направлении виден совершающимся против часовой стрелки.
Учитывая, что , и пользуясь определением ротора (3), перепишем формулу (4) в следующем виде: Рассмотрим сначала случай, когда гладкая поверхность Е и ее контур L однозначно проектируются на область D плоскости хОу и ее границу — контур А соответственно (рис. 32). Ориентация контура L порождает определенную ориентацию контура А. Для определенности будем считать, что контур L ориентирован так, что поверхность Е остается слева, так что веетор нормали п к поверхности Е составдя етсосью Oz острый угол 7 (cos 7 >0).
Возможно вам будут полезны данные страницы:
Пусть — уравнение поверхности Е и функция ф(х>у) непрерывна и имеет непрерывные частные производные gf и ^ в замкнутой области D.
Рассмотрим интеграл Линия L лежит на поверхности Е. Поэтому, пользуясь уравнением этой поверхности , мы можем заменить г под знаком интеграла на ^(ж, у). Координаты перемсннойточки кривой А равны координатам соответствующей точки на кривой L, а потому интегрирование по L можно заменить интегрированием по А, Применим к интегралу, стоящему справа, формулу Грина.
Имеем Перейдем теперь от интеграла по области D к интегралу по поверхности Е. Так как dS = cos 7 • da, то из формулы (8) получим, что Вектор нормали п° к поверхности Е определяется выражением к. Отсюда видно, что . Поэтому равенсгво (9) можно переписать так: Считая Е гладкой поверхностью, однозначно проектирующейся на все три координатные плоскости, аналогично убеждаемся в справедливости формул Циркуляция векторного поля.
Ротор вектора Теорема Стокса Ротор (вихрь) векторного поля Инвариантное определение ротора поля Физический смысл ротора поля Правила вычисления ротора Складывая равенства почленно, получим формулу Стокса (5), или, короче, Замечание 1. Мы показали, что поле вектора rote — соленоидальное, и потому поток вектора rota не зависит от вида поверхности Е, натянутой на контур L. Замечание 2. Формула (4) выведена в предположении, что поверхность £ однозначно проектируется на все три координатные плоскости. Бели это условие не выполнено, то разбиваем £ на частя так, чтобы каждая часть указанному условию удовлетворяла, а затем пользуемся аддитивностью интегралов.
Пример 3:
Вычислить циркуляцию вектора по линии 1) пользуясь определением; 2) по теореме Стокса. 4 1) Зададим линию L параметрически: Тогда 2) Найдем rota: Натянем на контур L кусок плосхости Тогда . Инвариантное определение ротора поля Из теоремы Стокса можно получить инвариантное определение ротора поля, не связанное с выбором системы координат. Теорема 8.
Проекция ротора а на любое направление не зависит от выбора системы координат и равна поверхностной плотности циркуляции вектора а по контуру площадки, перпендикулярной этому направлению, Здесь (Е) — плоская площадка, перпендикулярная вектору л; 5 — площадь этой площадки; L — контур площадки, ориентированный так, чтобы обход контура был виден из конца вектора п против хода часовой стрелки; (Е) М означает, что площадка (Е) стягивается к точке М, в которой рассматривается вектор rot а, причем вектор нормали п к этой площадке остается все время одним и тем же (рис. 33). 4
Применим сначала к циркуляции (a,dr) вектора а теорему Стокса, а затем к полученному двойному интегралу — теорему о среднем значении: откуда (скалярное произведение берется в некоторой средней точке Мф площадки (Е)). Пристягивании площадки (Е) кточке М средняяточка Л/ср тоже стремится кточ-ке М и, в силу предполагаемой непрерывности частных производных от координат вектора а (а значит, и непрерывности rot а), мы получаем Поскольку проекция вектора rot а на произвольное направление не зависитотвы-бора системы координат,то и сам вектор rota инвариантен относительно этого выбора.
Отсюда получаем следующее инвариантное определение ротора поля: ротор поля есть вектор, длина которого равна наибольшей поверхностной плотности циркуляции в данной точке, направленный перпендикулярно той площадке, на которой эта наибольшая плотность циркуляции достигается; при этом ориентация вектора rota согласуется с ориентацией контура, при которой циркуляция положительна, по правилу правого винта. 8.3.
Физический смысл ротора поля Пустьтвердое
тело вращается вокруг неподвижной оси I с угловой скоростью и. Не нарушая общности, можно считать, что ось I совпадает с осью Oz (рис. 34). Пусть М(г) — изучаемая точка тела, где Вектор угловой скорости в нашем случае равен из = wk, вычислим вектор v линейной скорости точки М, Отсюда Циркуляция векторного поля. Ротор вектора Теорема Стокса Ротор (вихрь) векторного поля Инвариантное определение ротора поля Физический смысл ротора поля.
Правила вычисления ротора
Итак, вихрь поля скоростей вращающегося твердого тела одинаков во всех точках поля, параллелен оси вращения и равен удвоенной угловой скорости вращения. 8.4. Правила вычисления ротора 1. Ротор постоянного вектора с равен нулевому вектору, 2. Ротор обладает свойством линейности постоянные числа. 3. Ротор произведения скалярной функции и<М) на векторную а(М) вычисляется по формуле
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Элементы теории поля и векторного анализа (стр. 2 )
 |
Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 7 8 |

 , где
, где  – потенциал заряда.
– потенциал заряда.
Пример 1.2. Найти  , где –φ(r) – произвольная дифференцируемая функция от r, где, как и в предыдущем примере, r длина радиус-вектора r.
, где –φ(r) – произвольная дифференцируемая функция от r, где, как и в предыдущем примере, r длина радиус-вектора r.


Аналогично,  ,
,  . В итоге получаем:
. В итоге получаем:

Последнее соотношение можно использовать для получения напряженности поля для сферически-симметричных потенциалов, то есть для потенциалов, поверхности уровня которых представляют собой сферы.
1.3 Оператор C
Определение Оператором называется правило, по которому одной функции ставится в соответствие другая функция.
Предположим, мы имеем две функции f и φ.Соотношение f = Tφ, где T – оператор, устанавливает соответствие между ними, Например, если  , то T – оператор дифференцирования, если
, то T – оператор дифференцирования, если  , то T – интегральный оператор и т. д..
, то T – интегральный оператор и т. д..
Заметим, соотношение (1.3) не зависит от того, какое скалярное поле мы дифференцируем. Эту формулу можно записать компактно, если ввести дифференциальный векторный оператор C (читается «набла»).
 (1.9)
(1.9)
В многих случаях с оператором ∇ можно обращаться как с обычным вектором. ∇ =  . Следует только помнить, что операторная алгебра несколько отличается от векторной. Оператор действует на функцию, написанную справа от оператора. Например, ∇ f и f∇ – зто разные выражения:: ∇ f = grad f – вектор,
. Следует только помнить, что операторная алгебра несколько отличается от векторной. Оператор действует на функцию, написанную справа от оператора. Например, ∇ f и f∇ – зто разные выражения:: ∇ f = grad f – вектор,  – векторный оператор, образно говоря, «жаждущий» подействовать на функцию, которая появится справа от него.
– векторный оператор, образно говоря, «жаждущий» подействовать на функцию, которая появится справа от него.
Примечание Вообще говоря, не любые три оператора образуют векторный оператор. (Также как не любые три числа образуют вектор.) Компоненты векторных операторов, как и компоненты обычных векторов, при преобразовании системы координат должны преобразовываться определенным образом. Можно провести и более простые рассуждения, показывающие, что ∇ – векторный оператор. В предыдущем разделе мы показали, что grad f = ∇ f – вектор, направленный по нормали к поверхности уровня. Поскольку, формально соотношение (1.6) выглядит как действие оператора на скалярную функцию и в результате получается вектор, то поэтому ∇ – векторный оператор.
Пример 1.3. Вычислить вектор  в точке (1,2,0).
в точке (1,2,0).
Последовательно проводим действия:
1. Находим частные производные от функции 
 ;
;  ;
;  .
.
2. Каждую из полученных производных умножаем на соответствующий единичный вектор, полученные векторы складываем и результат умножаем на функцию  :
:
 .
.
3. Вычисляем полученный вектор в точке (1,2,0):
 .
.
1.4 Действия с оператором ∇. Дивергенция вектора. Ротор вектора.
Рассмотрим векторное поле A(x, y,z) = Из двух векторов ∇ и A по обычным правилам векторной алгебры можно образовать скалярное произведение:
 (1.10)
(1.10)
Эта скалярная величина называется дивергенцией вектора A и обозначается как divA:
 (1.11)
(1.11)
Из векторов ∇ и A можно образовать и векторное произведение. Используя обычные правила векторной алгебры, получим:
 (1.12)
(1.12)
Эта векторная величина называется ротором вектора A и обозначается как rotA:
 (1.13)
(1.13)
Примечание Определения (1.1) и (1.13) даны в прямоугольной системе координат. К независящим от выбора системы координат определениям дивергенции и ротора функции, а также к их смыслу мы вернемся позже.
В различных применениях векторного анализа часто возникает необходимость в вычислении div(Af) и rot(Af), где A – векторное поле, f-скалярное. Получим соответствующие формулы, используя (1.8), (1.10) и (1.12):

 (1.14)
(1.14)



 (1.15)
(1.15)
Пример 1.4. Вычислить divr, где r = – радиус вектор:

Пример 1.5. Вычислить rotr, где, по-прежнему, r = – радиус вектор:

Пример 1.6. Вычислить div(rφ(r)),где r = – радиус вектор, r – его длина, φ(r) – произвольная дифференцируемая функция от r.
Используя формулу (1.14) и решения примеров 1.2 и 1.4, получаем

Пример 1.7. Вычислить rot(rφ(r)),где r, r и φ(r) определены в примере 1.6.
Используя формулу (1.15) и решения примеров 1.2 и 1.5, получаем:

1.5 Некоторые формулы векторного анализа
До сих пор мы рассматривали действие оператора ∇ на скалярные и векторные поля и их произведения. Сейчас мы получим некоторые часто встречающиеся в приложениях соотношения, в которых оператор ∇ встречается дважды.
1.5.1 Вычисление rot gradf
Пустьf(x, y,z) – некоторое скалярное поле. Тогда, используя формулы (1.3) и (1.10) получим:
 (1.16)
(1.16)
Этот же результат можно получить проще, используя, оператор ∇.
rot gradf = [∇,(∇f] = [∇,∇]f = 0, так как векторное произведение вектора самого на себя равно нулю.
1.5.2 Вычисление div rot A
Используя соотношения (1.8) –(1.11) и правила для вычисления смешанного произведения векторов, получаем:
 , (1.17)
, (1.17)
так как в определителе две одинаковых строки.
1.5.2 Вычисление div gradf. Оператор Лапласа.
Используя соотношения (1.6) –(1.9) и правила для вычисления скалярного произведения векторов, получаем:
 (1.18)
(1.18)
Оператор  широко используется в приложениях и называется оператором Лапласа или лапласианом и обозначается символом Δ:
широко используется в приложениях и называется оператором Лапласа или лапласианом и обозначается символом Δ:
 (1.19)
(1.19)
Оператор Лапласа может действовать и на векторное поле A(x, y,z). По определению:
ΔA = i ΔAx+ j ΔAy+ k ΔAz (1.20)
1.5.3 Вычисление rot rotA.
Для вычисления используем известную формулу для двойного векторного произведения:
где A, B, C– три произвольных вектора.
rot rotA = [∇,[∇A]] = ∇(∇,A)-( ∇,∇)A = grad divA – ΔA (1.21)
Разумеется, эту же формулу мы получим, используя (1.12) и расписывая выражение rot rotA по компонентам.

Последняя строка в этом выражении, сумма слагаемых в которой равна нулю, добавлена для удобства вычислений. Группируя слагаемые со знаком “+”и со знаком “-“ и принимая во внимание равенство смешанных производных, получим:
 что и требовалось показать.
что и требовалось показать.
Примечание Последние вычисления показывают преимущества использования оператора ∇ при рассмотрении различных векторных соотношений, содержащих дифференцирование.
[spoiler title=”источники:”]
http://natalibrilenova.ru/tsirkulyatsiya-vektornogo-polya-rotor-vektora-teorema-stoksa/
http://pandia.ru/text/80/484/8647-2.php
[/spoiler]
3.
Оператор Лапласа.

.
Если

,
то:

,

,

.
(9)
Подставляя
(9) в (8), получаем:

.
(10)
Оператор
Лапласа в цилиндрической системе
координат.
В §25 мы доказали, что для цилиндрической
системы координат

,

,

.
Согласно выражению (10) получаем:

.
Оператор
Лапласа в сферической системе координат.
Аналогично
предыдущему случаю имеем:
,

,

,

,

.
§Доп. Дифференциальные операции второго порядка.
|
|
|
||
|
|
|
||
|
|
|
||
|
|
|
|









Доказательство.

.
(1)
Введём
обозначение:
.
(2)
Тогда
из (1) имеем:
.
Оператор Лапласа может действовать не
только на скалярные поля, но и на
векторные. Согласно формуле (2):

.
Найдём ротор от ротора
(используя формулы из §23):

.
Используя
свойство 3 из параграфа 22, получаем (так
как

– константа, то её можно выносить за
пределы оператора

):

.
(3)
Так как

,
то из (3) получаем:

,
что и
требовалось доказать.
Раздел 3: Ряды Фурье §29.Ряд Фурье по ортонормированной системе функций, минимальное свойство частичной суммы ряда Фурье, неравенство Бесселя.
В линейной
алгебре было рассмотрено Евклидово
пространство. Это линейное пространство,
в котором определена симметричная
билинейная форма, соответствующая
которой квадратичная форма положительно
определена. Далее скалярное произведение
будем обозначать следующим образом:

.
Будем рассматривать пространство
кусочно-непрерывных функций на отрезке
,
которое будем обозначать
.
Но будем рассматривать не все
кусочно-непрерывные функции. Потребуем,
чтобы наши функции удовлетворяли
условию:


,
то есть
значение функции в точке разрыва есть
среднее арифметическое между соседними
значениями (см. рис.). Можно также
убедиться, что множество таких непрерывных
функций образует линейное пространство.
Введём операцию скалярного произведения:

.
Линейное пространство называется
нормированным, если всякому элементу
,
принадлежащему этому пространству,
ставится в соответствие действительное
число

,
причём:
1.
,

.
2.
.
3.
.
Если
ввести, что

,
то Евклидово пространство становится
нормированным.
Некоторая система функций

называется ортогональной, если

при
и

.
Эта система называется ортонормированной,
если
.
Пример.
Система
функций

(1) – эта система функций является
ортогональной на отрезке

.

,

,

,
при
.
Аналогично

при
.
Так же и

при
.
Систему функций (1)
можно преобразовать в ортонормированную:

.
Рядом Фурье функции
по ортонормированной системе функций

(2) назовём ряд

,
(3) где

(4).
Обозначим

– частичные суммы ряда Фурье,

(5) – некоторые другие суммы.
Расстоянием или отклонением
между функциями
и

назовём :

.
—————————————————————————————————————————-
Теорема. Наименьшее отклонение сумм
(5) от функции
даёт n-ная частная сумма
ряда Фурье. (то есть при подстановке в
(5)

вместо

получим наименьшее отклонение).
Доказательство.
Рассмотрим
норму
.
Согласно данному выше определению нормы
имеем:

.
Так как

(это две одинаковые суммы, суммирование
у которых происходит по разным индексам),
то имеем:


.
Очевидно,
что сумма будет минимальной, если

,что
и требовалось доказать.
————————————————————————————————————————-
Следствие 1.
Для
всякой ортонормированной системы
функций
и всякого

имеет место неравенство:

,
(6)
где

– произвольные числа.
Доказательство
вытекает из равенства
————————————————————————————————————————
Следствие 2.
Для
всякой ортонормированной системы
функций
и кусочно-непрерывной функции

,
имеет место неравенство Бесселя:

,
(7) где
– коэффициенты Фурье функции
.
Доказательство.
Из неравенства (6) имеем:

(8)
Левые части неравенства (8) представляют
собой частичные суммы ряда

(9). Они образуют возрастающую
последовательность, ограниченную сверху
в силу неравенства (8). Следовательно,
такая последовательность сходящаяся,
следовательно ряд (9) сходится и его
сумма не превосходит
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
чему равен ротор ротора?
ВАВАПМВПМА
Знаток
(488),
закрыт
14 лет назад
Vlad Imirov
Ученик
(95)
5 лет назад
Кинг-Мудрец ответил правильно. Чтобы не повторяться отвечу словами (для полноты ответа):” Ротор от ротора равен градиенту дивергенции минус набла в квадрате”.Этот ответ я знал ещё в конце 1982 года, но тогда ещё не было интернета, а сейчас, просто, решил проверить насколько умён поисковик.
Сообщения без ответов | Активные темы
| Автор | Сообщение | ||
|---|---|---|---|
|
Заголовок сообщения: Ротор ротора
|
|||
|
[math]operatorname{rot}operatorname{rot}( varphi * mathbf{r} )[/math] при [math]varphi =left( mathbf{d} , mathbf{r} right) div mathbf{r} ^{3}[/math]
|
||
| Вернуться к началу |
|
||




|
searcher |
Заголовок сообщения: Re: Ротор ротора
|
|
Звёздочка в первой формуле – это наверное векторное произведение. slava_psk писал(а): И не совсем понятна вторая формула. Думаю, что во второй формуле первое [math]r[/math] – это вектор, второе [math]r[/math] – это его норма, палочка с двумя точками – это поделить. Но это всё мои предположения. Как там на самом деле, сказать трудно.
|
|
| Вернуться к началу |
|
|
searcher |
Заголовок сообщения: Re: Ротор ротора
|
|
slava_psk писал(а): В первой формуле φ – это скорее координата, т.е. скаляр. Скаляр умножается на вектор Наверное, да. Тогда звёздочка там не нужна.
|
|
| Вернуться к началу |
|
|
faraism |
Заголовок сообщения: Re: Ротор ротора
|
|
в скобках фи умножить на вектор r а взаписи при фи скалярное произведение деленное на r в кубе
|
|
| Вернуться к началу |
|
|
faraism |
Заголовок сообщения: Re: Ротор ротора
|
|
задание не актуально) все решил
|
|
| Вернуться к началу |
|
| Похожие темы | Автор | Ответы | Просмотры | Последнее сообщение |
|---|---|---|---|---|
|
Ротор
в форуме Векторный анализ и Теория поля |
Kikki |
3 |
506 |
26 сен 2013, 11:27 |
|
Ротор
в форуме Векторный анализ и Теория поля |
sedovns |
5 |
365 |
28 май 2020, 14:35 |
|
Ротор тензора
в форуме Функциональный анализ, Топология и Дифференциальная геометрия |
VMD |
2 |
424 |
22 янв 2020, 13:39 |
|
Вычислить ротор
в форуме Векторный анализ и Теория поля |
luci616 |
2 |
247 |
29 окт 2020, 09:25 |
|
Дивергенция и ротор
в форуме Векторный анализ и Теория поля |
dvp701 |
18 |
557 |
05 дек 2020, 16:04 |
|
Ротор векторного поля
в форуме Векторный анализ и Теория поля |
sottatiana |
3 |
607 |
12 дек 2013, 21:02 |
|
Найти ротор вектора(((
в форуме Векторный анализ и Теория поля |
irinafominyh |
0 |
564 |
04 сен 2014, 18:37 |
|
Доказать, что ротор поля
в форуме Векторный анализ и Теория поля |
any5957 |
1 |
430 |
08 апр 2015, 21:13 |
|
Доказать, что ротор поля
в форуме Векторный анализ и Теория поля |
any5957 |
0 |
334 |
08 апр 2015, 21:16 |
|
Вычислить ротор поля
в форуме Интегральное исчисление |
Ensider |
1 |
259 |
07 май 2015, 19:01 |
Кто сейчас на конференции |
|
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 5 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |
Есть такие заклинания, которые многие якобы умные люди любят произносить, чтобы “закопать” собеседника, убедив его, что он мало образован. И меня самого не так давно пытались по тому же принципу отправить к изучению уравнений в частных производных. Благо с этими уравнениями я провёл не одну бессонную ночь, потому знаний вполне хватает. Кроме того, эти термины нам пригодятся, чтобы разобраться с новой теорией элементарных частиц и строения атомного ядра.
Для простоты всё будем рассматривать на плоскости и относительно конкретной ситуации, изображённой на рисунке.
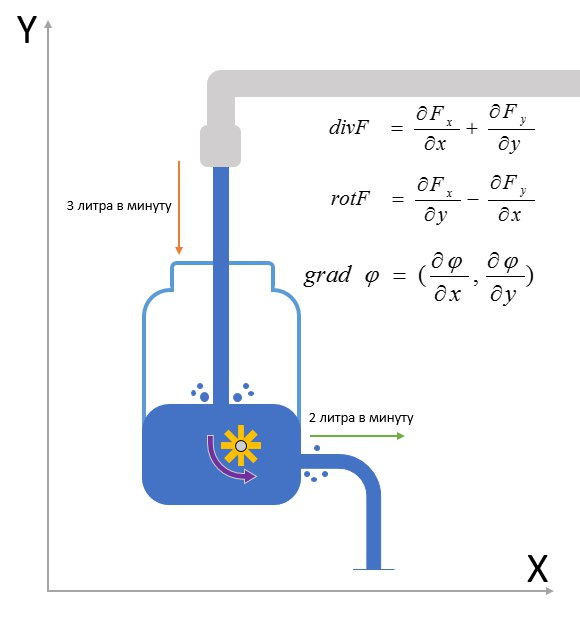
Пусть в раковине стоит банка с водой. В боку у неё дырка. Из этой дырки постепенно вытекает вода в объёме порядка двух литров в минуту. А из крана в ту самую банку заливается 3 литра в минуту. Тогда с помощью дифференциальных операторов можно математически довольно точно описать происходящее внутри банки.
Начнём с самого простого, с дивергенции. Её часто записывают, как div F. Сейчас больше употребляют запись вида ∇ ⋅ F. По определению это изменение потока в пределах малого объёма. Т.е. нам нужно собрать всё, что из этого малого объёма (из банки) выходит и вычесть из этого всё, что в этот малый объём входит. Из картинки ясно видно, что имеется 3 литра в минуту входящего потока и 2 литра в минуту – выходящего. Отсюда имеем, что дивергенция внутри банки будет равна -1. Т.е. выходит на литр меньше, чем заходит. И всё. Никакой магии. Если мы захотим углубиться в этот вопрос, то можно будет привлекать ещё и размеры банки. Т.е. этот объём воды, который притекает в банку, будет как-то распределён по её объёму. Но в данном случае это нам не нужно.
С ротором (rot F или ∇ × F) дело несколько сложнее. По определению это циркуляция по малому контуру. Т.е. то, насколько в конкретной точке поток поворачивается. Мы в прошлый раз говорили о векторе угловой скорости. Так вот ротор – это именно угловая скорость, умноженная на два. Как и вектор угловой скорости, ротор направлен перпендикулярно рассматриваемой плоскости, в которой происходит вращение. А величина определяется тем сколько потока при прохождении через банку мы потеряли по Y и сколько приобрели по X. В нашем случае это 3 + 2 = 5 единиц. И если мы взглянем на жёлтую вертушку на рисунке, её будет вращать по направлению фиолетовой стрелки как раз с интенсивностью в 5 наших условных единиц. Сам вектор будет направлен на нас. Т.е. ротором мы называем просто меру поворота некоторого потока. Ничего хитрого.
Ну и наконец градиент (grad ф или ∇ F. Не путать с дивергенцией ∇ ⋅ F!). Для начала отметим, что в отличие от ротора и дивергенции градиент характеризует не поток, а некоторую величину вроде температуры или давления и ставит ей в соответствие некоторое векторное поле, которое вполне можно понимать, как некоторый поток. Т.е. ситуация, в общем, обратная. Но мы попробуем за эту величину взять интенсивность нашего потока. Обратимся к определению: градиент – вектор, указывающий направление наибольшего возрастания величины потока, равный по величине изменению этого потока. Т.е. если мы внимательно глянем на нашу банку, то поймём, что справа от банки у нас скорость потока 2 единицы по оси X, а сверху – 3 единицы против оси Y. Т.е. поток изменился на единицу. Значит, длина вектора составит 1. А направление будет совпадать с направлением вектора (-2,3), т.к. интенсивность потока возрастает против его течения.
Если бы мы рассматривали некоторую комнату, в каждой точке внутри которой задано давление, то градиент можно представить, как направление наискорейшего роста давления. Вообще говоря в описанной ситуации против этого градиента будет дуть ветер. И метеорологи определяют направление движения воздушных масс именно с помощью таких градиентов.
Что бы вам не пытались говорить о сложности уравнений в частных производных и прочих понятий, в их основе всегда лежат адекватные достаточно простые положения. И если вам говорят обратное, то скорее всего они либо сами не разобрались, либо просто пытаются ввести вас в заблуждение. Ну а сами роторы и дивергенции – это не более чем удобный способ описания природы, чтобы можно было делать достаточно точные расчёты и делать далеко идущие выводы.
