Сферические координаты (сферическая система координат)
Для введения сферической системы координат в пространстве выбирается плоскость (основная плоскость) и на ней задается полярная система координат с полюсом (начало сферической системы координат) и полярной осью
. Через точку
перпендикулярно основной плоскости проведем ось
(ось аппликат) и выберем ее направление так, чтобы возрастание полярного угла со стороны положительного направления оси
происходило против часовой стрелки (рис.2.36,а).
В сферической системе координат положение точки , не лежащей на оси аппликат, характеризуется расстоянием
до начала координат, полярным углом
точки
– ортогональной проекции точки
на основную плоскость, и углом
между вектором
и положительным направлением оси аппликат. Таким образом, сферические координаты точки
– это упорядоченная тройка чисел
– радиус
, долгота
и широта
. У точек, принадлежащих оси аппликат, не определена долгота, их положение задается радиусом
и широтой
для положительной части оси
и
для отрицательной ее части. Начало координат задается нулевым значением радиуса
. Иногда вместо угла
широтой называют угол
, принимающий значения
.
Со сферической системой координат можно связать прямоугольную систему координат
(рис.2.36,б), у которой начало и базисные векторы
совпадают с началом сферической системы координат и единичными векторами на полярной оси
и оси аппликат
соответственно, а базисный вектор
выбирается так, чтобы тройка
была правой (при этом базис оказывается стандартным).
Наоборот, если в пространстве задана правая прямоугольная система координат, то, приняв положительную полуось абсцисс за полярную ось, получим сферическую систему координат (связанную с данной прямоугольной).
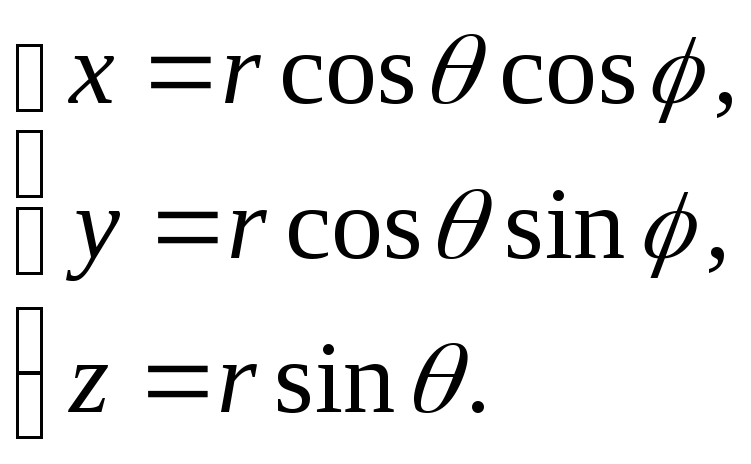
Переход от сферических координат к декартовым (прямоугольным)
Получим формулы, связывающие между собой прямоугольные координаты точки
и её сферические координаты
. По рис.2.36,б получаем
(2.21)
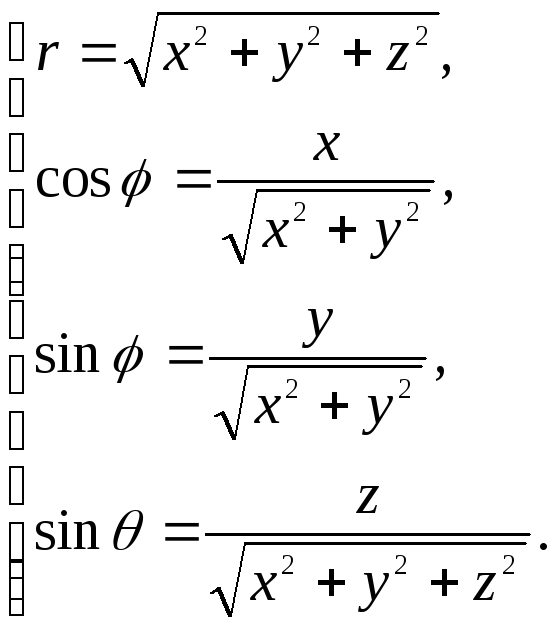
Эти формулы перехода позволяют найти прямоугольные координаты по известным сферическим координатам. Обратный переход выполняется по формулам
(2.22)
Формулы (2.22) определяют долготу с точностью до слагаемых
, где
. При
из них следует, что
. Главное значение долготы
находится по формулам (см. рис.2.29).
Пример 2.13. В сферической системе координат :
а) построить координатные поверхности ;
б) найти сферические координаты точки
, если известны её прямоугольные координаты
;
в) найти прямоугольные координаты точки
, если известны её сферические координаты:
.
Решение. а) Координатной поверхностью , т.е. геометрическим местом точек
при фиксированном значении радиуса
, является сфера с центром в начале координат (рис.2.37). Этим объясняется название сферической системы координат. Координатной поверхностью
, т.е. геометрическим местом точек
при фиксированном значении долготы
, является полуплоскость, ограниченная осью аппликат (на рис.2.37 изображена полуплоскость
). Координатной поверхностью
, т.е. геометрическим местом точек
при фиксированном значении широты
, является конус, ось которого совпадает с осью аппликат, а вершина – с началом координат. При
получаем основную плоскость. На рис.2.37 изображены конус
и основная плоскость
.
б) Найдем сферические координаты точки . По формулам (2.22), учитывая рис.2.29 (см. пример 2.12), получаем
в) По формулам (2.21) получаем
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 25 декабря 2020 года; проверки требуют 4 правки.
Сферическая система координат — трёхмерная система координат, в которой каждая точка пространства определяется тремя числами  , где
, где  — расстояние до начала координат (радиальное расстояние), а
— расстояние до начала координат (радиальное расстояние), а  и
и  — зенитный и азимутальный углы соответственно.
— зенитный и азимутальный углы соответственно.
Понятия зенит и азимут широко используются в астрономии. Зенит — направление вертикального подъёма над произвольно выбранной точкой (точкой наблюдения), принадлежащей фундаментальной плоскости. В качестве фундаментальной плоскости в астрономии может быть выбрана плоскость, в которой лежит экватор, или плоскость, в которой лежит горизонт, или плоскость эклиптики и т. д., что порождает разные системы небесных координат. Азимут — угол между произвольно выбранным лучом фундаментальной плоскости с началом в точке наблюдения и другим лучом этой плоскости, имеющим общее начало с первым.
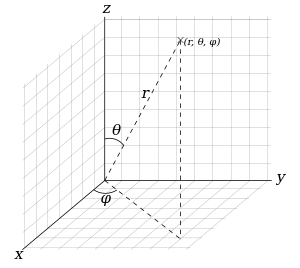
Рис. 1.Точка имеет три декартовых и три сферических координаты
Если рассматривать сферическую систему координат относительно декартовой системы  , фундаментальной плоскостью будет плоскость
, фундаментальной плоскостью будет плоскость  , зенитным углом точки, заданной радиус-вектором
, зенитным углом точки, заданной радиус-вектором  , будет угол между и осью
, будет угол между и осью  , а азимутом — угол между проекцией на плоскость и осью
, а азимутом — угол между проекцией на плоскость и осью  . Это объясняет названия углов и то, что сферическая система координат может служить обобщением множества видов систем небесных координат.
. Это объясняет названия углов и то, что сферическая система координат может служить обобщением множества видов систем небесных координат.
Определения[править | править код]
Положение точки в сферической системе координат определяется тройкой , где
Угол называется зенитным, или полярным, также он может называться наклонением, или коширотой, а угол — азимутальным. Углы и не определены при  , также не определён угол при
, также не определён угол при  (то есть при
(то есть при  или
или  ).
).
Такое соглашение установлено в стандарте (ISO 31-11). Кроме того может использоваться соглашение, когда вместо зенитного угла , используется угол между радиус-вектором точки и плоскостью , равный  . Он называется широтой и может быть обозначен той же буквой . Широта может изменяться в пределах
. Он называется широтой и может быть обозначен той же буквой . Широта может изменяться в пределах  . При этом соглашении углы и не имеют значения при , так же как и в первом случае, а не имеет значения при
. При этом соглашении углы и не имеют значения при , так же как и в первом случае, а не имеет значения при  (то есть при
(то есть при  или
или  ).
).
Переход к другим системам координат[править | править код]
Декартова система координат[править | править код]
Если заданы сферические координаты точки , то переход к декартовым осуществляется по формулам:

Обратно, от декартовых к сферическим:

Якобиан преобразования к сферическим координатам равен

Таким образом, элемент объёма при переходе от декартовых к сферическим координатам будет выглядеть следующим образом:

Цилиндрическая система координат[править | править код]
Если заданы сферические координаты точки, то переход к цилиндрическим осуществляется по формулам:

Обратно от цилиндрических к сферическим:

Якобиан преобразования от сферических к цилиндрическим  .
.
Дифференциальные характеристики[править | править код]
Вектор  , проведённый из точки
, проведённый из точки  в точку
в точку  , равен
, равен

где



ортогональные единичные векторы сферических координат в направлении увеличения  , соответственно, а
, соответственно, а  — единичные векторы декартовых координат. Сферические координаты являются ортогональными, поэтому метрический тензор имеет в них диагональный вид:
— единичные векторы декартовых координат. Сферические координаты являются ортогональными, поэтому метрический тензор имеет в них диагональный вид:


- Квадрат дифференциала длины дуги:


- Коэффициенты Ламе:

- Символы Кристоффеля :




Остальные равны нулю.
Математическое моделирование Земли[править | править код]
Сферическая географическая система координат[править | править код]
Сферическая географическая система координат строится следующим образом[1]:
Вектор магнитной индукции магнитного поля Земли  имеет компоненты
имеет компоненты

где  — магнитное наклонение;
— магнитное наклонение;  — магнитное склонение.
— магнитное склонение.
Компоненты вектора ускорения свободного падения  равны
равны

Наконец, компоненты вектора угловой скорости вращения Земли  такие:
такие:

В сферических географических координатах оптимально решать уравнения, описывающие поведение нейтральных частиц околоземного пространства[1].
Сферическая геомагнитная система координат[править | править код]
Сферическая геомагнитная система координат строится следующим образом[1]:
Географические координаты северного магнитного полюса равны

В сферической геомагнитной системе координат склонение  и
и





Формулы, связывающие географические и геомагнитные сферические координаты[1]:




В сферических геомагнитных координатах проще, чем в сферических географических координатах, описывать влияние геомагнитного поля на заряженные частицы околоземного пространства[1].
См. также[править | править код]
- Углы Эйлера
- Гиперсферические координаты
Примечания[править | править код]
- ↑ 1 2 3 4 5 Брюнелли Б. Е., Намгаладзе А. А. Физика ионосферы. М.: Наука, 1988. § 3.5, С. 172—173. ISBN 5-02-000716-1
Ссылки[править | править код]
- Weisstein, Eric W. Сферические координаты (англ.) на сайте Wolfram MathWorld.
Рассмотрим
в пространстве координатную плоскость
Р, на которой задана полярная система
координат. ПустьOz –координатная
ось, перпендикулярная плоскостиРи пересекающая ее в полюсеО.
Координатная осьOz направлена так,
чтобы из конца положительного направления
осиOz направление отсчета положительных
значений полярного углаφот полярной
осиОхбыло видно против часовой
стрелки. Совокупность этих элементов
называетсяполярной системой
координат в пространстве(рис.3.2).
Координатная
плоскость Рназываетсяэкваториальной,
а координатная осьOz–зенитной.
Для удобства будем полагать, что
масштабные отрезки одинаковы (ОЕ1=ОЕ2) и точка отсчетаОкоординатной осиOzсовпадает с
полюсомО.
Цилиндрическими
координатами точкиМ, не лежащими
на зенитной оси, называется упорядоченная
тройка чиселρ, φ, z, гдеρиφ– полярные координаты ортогональной
проекцииМр точкиМна экваториальную плоскость, аz–
координата на зенитной осиOzпроекцииМz точкиМна зенитную
ось (рис. 3.3). Для точек зенитной оси
считаютρ = 0,φ– любое число, аzопределяется так, как указано выше.
Тот факт, чтоρ, φ иzесть
цилиндрические координаты точкиМ в
пространстве, записывают так:М(ρ,φ,z).
Заметим,
что при помощи цилиндрических координат
не устанавливается взаимно однозначного
соответствия между множеством всех
точек геометрического пространства и
множеством упорядоченных троек
действительных чисел.
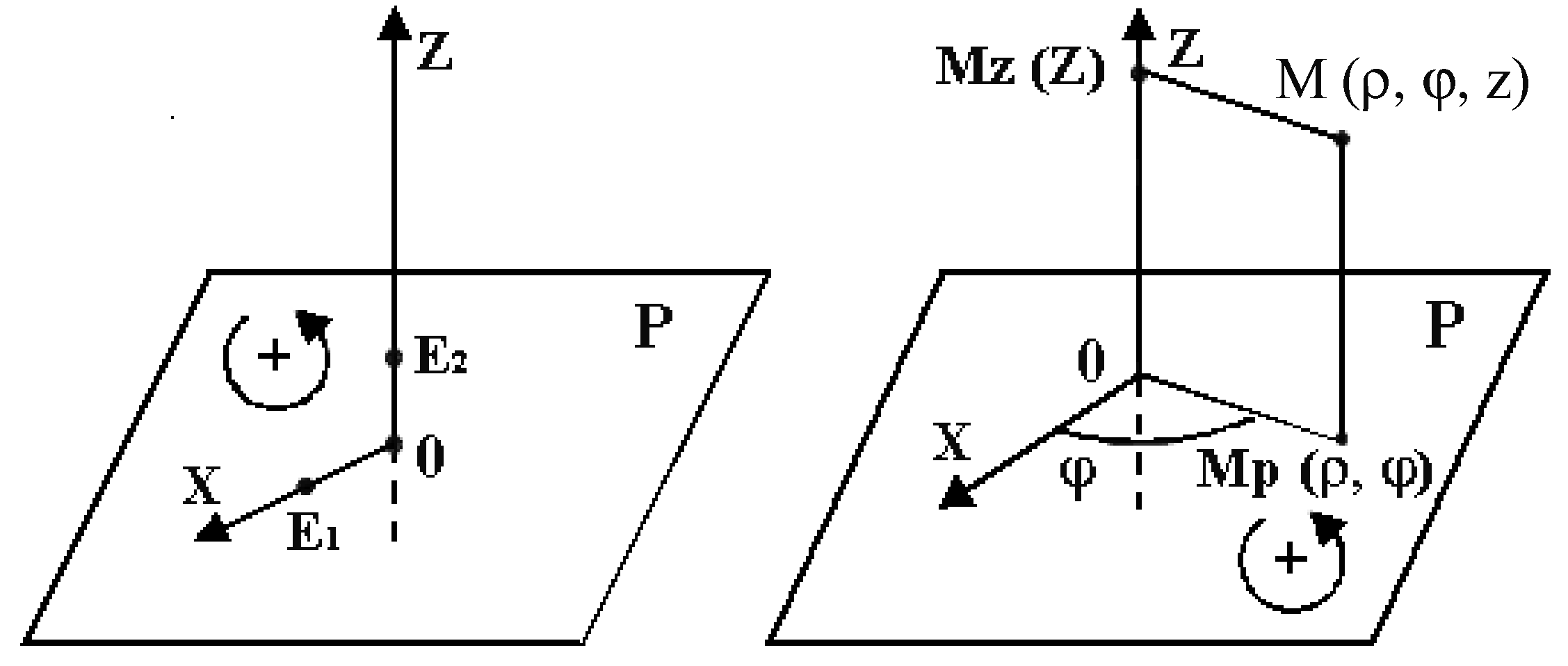
Рис. 3.2
Рис. 3.3
Сферическими
координатами точкиМ, не лежащей
на зенитной оси, называется упорядоченная
тройка чиселr, φ, Θ, гдеr– длина отрезкаОМ,φ– угол от
полярной осиОхдо лучаОМр(Мр– проекция точкиМна экваториальную плоскость), аΘ–
угол между лучамиОМриОМ, который принимает значения в
интервале![]() ,
,
причем считается, чтоΘ= 0, если точкаМлежит в экваториальной плоскости,Θ> 0, если лучОМобразует острый
угол с зенитной осью, иΘ< 0, если
лучОМобразует тупой угол с зенитной
осью (рис.3.4).

Рис. 3.4
Если
точка М лежит на зенитной оси и не
совпадает с полюсомО, то считают,
чтоφ– любое число, а![]() или
или![]() в зависимости от того, совпадает ли
в зависимости от того, совпадает ли
направление лучаОМ с направлением
зенитной оси или противоположно ему.
Для полюса считаютr= 0,φиΘ– любые числа. При помощи сферических
координат не устанавливается взаимно
однозначного соответствия между
множеством всех точек пространства и
множеством упорядоченных троек
действительных чисел.
Найдем
зависимости между прямоугольными
декартовыми координатами точки М(х,
у, z) и ее цилиндрическими координатамиМ(ρ, φ, z) и сферическими
координатамиМ(r, φ, θ).
Введем декартову прямоугольную систему
координат, принимая за положительную
полуосьОхполярную ось, за осьОу– ось, полученную из осиОхповоротом
ее вокруг полюса в экваториальной
плоскости на угол![]() и зенитную ось за осьОz
и зенитную ось за осьОz
(рис.3.4.).
Из
рис.3.4, учитывая формулы (1.7) и рис.3.3.
находим
![]() ,
,![]() ,z= z(1.12)
,z= z(1.12)
Cдругой стороны,![]() ,
,
а![]() ,
,
значит,
 (1.13)
(1.13)
Формулы
(1.12) и (1.13) верны и для того случая, когда
точка Млежит на зенитной оси и когда
она совпадает с полюсом (при дополнительных
соглашениях о величинахρ иφв
этом случае).
По
формулам (1.12) вычисляются декартовы
прямоугольные координаты точки Мв случае, если известны ее цилиндрические
координаты, а по формулам (1.13) – если
известны ее сферические координаты.
Из
формул (1.13) следует, что
![]()
откуда
![]()
значит,
 (1.14)
(1.14)
По этим
формулам вычисляются сферические
координаты r,φ, ΘточкиМ,
не лежащей на зенитной оси по ее декартовым
прямоугольным координатамx,y,z
(при указанном взаимном расположении
этих двух систем координат).
Цилиндрические
координаты ρ, φ, zточкиМ
вычисляются по ее декартовым
прямоугольным координатамx, y,
zиз формул (1.12) с учетом формул (1.8) и
(1.9) или (1.10).
Аналогично
декартовым координатам определяется
уравнение поверхности в сферических
координатах:
![]()
и в цилиндрических
координатах
![]() .
.
Замечание.Вторую сферическую координатуφчасто называютдолготой, третьюΘ – широтой. Иногда вместо
широтыΘрассматривают уголψ
между положительным направлением
зенитной оси и лучомОМ, идущим из
полюсаО в данную точкуМ; величинаψизменяется в пределах от 0 доπ.
Величинаψназываетсязенитным
расстоянием.
Так
как
![]() ,
,
то в формулах (1.13) и (1.14) (в случае, если
за третью сферическую координату
принимается зенитное расстояние)![]() и
и![]() следует заменить соответственно на
следует заменить соответственно на![]() и
и
![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Этот калькулятор предназначен для преобразования координат в пространстве, заданных в трех системах:
- Прямоугольной (декартовой)
- Цилиндрической
- Сферической
Прямоугольная, цилиндрическая и сферическая системы координат

Прямоугольная система координат
Определяет точку в пространстве при помощи трех чисел : x, y, z. Каждое число соответствует длине кратчайшего отрезка, проложенного параллельно одноименной оси координат до плоскости, образованной другими осями координат. Длина берется со знаком минус, если точка находится со стороны отрицательных значений шкалы координат.
Цилндрическая система координат
Определяет точку в пространстве при помощи радиуса r, угла азимута φ, и высоты z. Высота z соответствует координате z в прямоугольной системе координат. Радиус r – всегда неотрицательное число, задающее минимальное расстояние от точки в пространстве до оси z. Азимутальный угол φ – значение в диапазоне 0 ..360 градусов – определяет угол, между положительной полуосью x и радиусом, проложенным через проекцию точки на плоскость, образованную осями x и y.
Сферическая система координат
Определяет точку в пространстве при помощи радиуса ρ, азимута φ, и полярного угла θ. Азимут φ совпадает со значением азимута в цилиндрических координатах. Радиус ρ – расстояние от центра координат, до точки. Полярный угол образован положительной полуосью z и радиусом из центра координат до точки в пространстве.
![]()
Прямоугольные координаты в пространстве
Точность вычисления
Знаков после запятой: 2
Цилиндрические координаты
Сферические координаты
Полярный угол (θ), градусы
Формулы преобразования декартовых координат
![]()
Цилиндрические координаты
Точность вычисления
Знаков после запятой: 2
Прямоугольные координаты
Сферические координаты
Полярный угол (θ), градусы
Формулы преобразования цилиндрических координат
Декартовы координаты:
,
Радиус в сферической системе:
Полярный угол:
, см Арктангенс с двумя аргументами
![]()
Сферические координаты
Полярный угол (θ), градусы
Точность вычисления
Знаков после запятой: 2
Прямоугольные координаты
Цилиндрические координаты
Формулы преобразования сферических координат
Декартовы координаты:
,
,
Радиус в цилиндрической системе:
Сферическими координатами называют систему координат для отображения геометрических свойств фигуры в трёх измерениях посредством задания трёх координат , где — кратчайшее расстояние до начала координат (радиальное расстояние), а и — зенитный и азимутальный углы соответственно.
Понятия зенит и азимут широко используются в астрономии. Вообще зенит — это направление вертикального подъёма над произвольно выбранной точкой (точкой наблюдения), принадлежащей так называемой фундаментальной плоскости. В качестве фундаментальной плоскости в астрономии может быть выбрана плоскость, в которой лежит экватор, или плоскость, в которой лежит горизонт, или плоскость эклиптики и т. д., что порождает разные системы небесных координат. Азимут — угол между произвольно выбранным лучом фундаментальной плоскости с началом в точке наблюдения и другим лучом этой плоскости, имеющим общее начало с первым.
Рис.1.Точка имеет три декартовых и три сферических координаты
Применительно к нашему рисунку сферической системы координат, фундаментальная плоскость — это плоскость xy. Зенит — некая удалённая точка, лежащая на оси Z и видимая из начала координат. Азимут отсчитывается от оси X до проекции радиус-вектора r на плоскость xy. Это объясняет названия углов, как и то, что сферическая система координат может служить обобщением (пусть хотя бы и приближённым) множества видов систем небесных координат.
Содержание
- 1 Определения
- 2 Переход к другим системам координат
- 2.1 Декартова система координат
- 2.2 Цилиндрическая система координат
- 3 Дифференциальные характеристики
- 4 См. также
- 5 Ссылки
Определения
Три координаты точки вводятся с помощью декартовой системы координат. Криволинейные координатные линии, проходящие через точку , образуются при изменении одной координаты при фиксированных остальных. За направление координатной линии в точке принимается направление возрастания соответствующей координаты. Векторы базиса  в точке являются частными производными радиус – вектора
в точке являются частными производными радиус – вектора  по переменным и составляют правую тройку.
по переменным и составляют правую тройку.
Угол называется зенитным, или полярным, или нормальным, а также он может быть назван английским словом colatitude, а угол — азимутальным. Углы и не имеют значения при , а не имеет значения при (то есть при или ).
Такое соглашение установлено в стандарте (ISO 31-11ruen). Кроме того может использоваться соглашение, когда вместо зенитного угла , используется угол между радиус-вектором точки r и плоскостью xy, равный  — . Он называется широтой и может быть обозначен той же буквой . Широта может изменяться в пределах . При этом соглашении углы и не имеют значения при , так же как и в первом случае, а не имеет значения при (то есть при или ).
— . Он называется широтой и может быть обозначен той же буквой . Широта может изменяться в пределах . При этом соглашении углы и не имеют значения при , так же как и в первом случае, а не имеет значения при (то есть при или ).
Часто, по аналогии с цилиндрической системой координат  , которая является правой, используют сферическую систему координат
, которая является правой, используют сферическую систему координат  , где изменен порядок следования координат в отличие от определенного выше. Такая система координат является левой, так как векторы базиса
, где изменен порядок следования координат в отличие от определенного выше. Такая система координат является левой, так как векторы базиса  при определении области изменения угла
при определении области изменения угла 
 составляют левую тройку векторов (луч из точки , направленный в указанной последовательности на концы векторов, двигается против часовой стрелки), в то время как исходная системе координат
составляют левую тройку векторов (луч из точки , направленный в указанной последовательности на концы векторов, двигается против часовой стрелки), в то время как исходная системе координат  является правой. Для векторных операций при переходе от одной системы координат к другой существенно, чтобы правая система переходила в правую. Сферическая система координат
является правой. Для векторных операций при переходе от одной системы координат к другой существенно, чтобы правая система переходила в правую. Сферическая система координат  будет правой, если определить угол
будет правой, если определить угол  следующим образом:
следующим образом:  .
.
Переход к другим системам координат
Декартова система координат
Если заданы сферические координаты точки , то переход к декартовым осуществляется по формулам:
Обратно, от декартовых к сферическим:

(здесь, конечно, требуется определенное естественное уточнение для значений вне первого октанта; то же для всех формул с арктангенсом здесь и ниже; впрочем, замена на соответствующую формулу с арккосинусом снимает этот вопрос в отношении координаты ).
Якобиан преобразования к сферическим координатам имеет вид:

Вывод
Переход от декартовых координат (x, y, z) к сферическим координатам (r, θ, φ):



Матрица перехода имеет следующий вид
![{hat {I}}(r,theta ,phi )={begin{bmatrix}{dfrac {partial x}{partial r}}&{dfrac {partial x}{partial theta }}&{dfrac {partial x}{partial phi }}\[3pt]{dfrac {partial y}{partial r}}&{dfrac {partial y}{partial theta }}&{dfrac {partial y}{partial phi }}\[3pt]{dfrac {partial z}{partial r}}&{dfrac {partial z}{partial theta }}&{dfrac {partial z}{partial phi }}\end{bmatrix}}={begin{bmatrix}sin theta ,cos phi &r,cos theta ,cos phi &-r,sin theta ,sin phi \sin theta ,sin phi &r,cos theta ,sin phi &r,sin theta ,cos phi \cos theta &-r,sin theta &0end{bmatrix}}.](https://wikimedia.org/api/rest_v1/media/math/render/svg/15331f5161a6f2a412ada3c56425b427f9720afc)
Столбцы матрицы перехода от декартовых координат к сферическим представляют собой декартовы координаты векторов базиса  , а якобиан — есть определитель матрицы перехода:
, а якобиан — есть определитель матрицы перехода:
Таким образом, элемент объёма при переходе от декартовых к сферическим координатам будет выглядеть следующим образом:
Цилиндрическая система координат
Если заданы сферические координаты точки, то переход к цилиндрическим осуществляется по формулам:
Обратно от цилиндрических к сферическим:

Якобиан преобразования от сферических к цилиндрическим:

Дифференциальные характеристики
Вектор , проведённый из точки в точку , равен
где
ортогональные единичные векторы сферических координат в направлении увеличения , соответственно,
а — единичные векторы декартовых координат.
Сферические координаты являются ортогональными, поэтому метрический тензор имеет в них диагональный вид:
- Квадрат дифференциала длины дуги:
- Коэффициенты Ламе:
- Символы Кристоффеля :
Остальные равны нулю.
См. также
- Углы Эйлера
- Гиперсфера § Гиперсферические координаты
Ссылки
- Weisstein, Eric W. Сферические координаты (англ.) на сайте Wolfram MathWorld.
