Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Драйверы делятся на две категории:
- Повторяющие форму сигналов. Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
- Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
Что делать если при подключении шагового двигателя – он отказывается вращаться? Что делать если подключенный двигатель дрожит, трещит или вращается не в ту сторону. В этой статье мы постараемся решить эти проблемы не прибегая к изменению настроек электроники.
Почему двигатель на осях X, Y или Z издает странные звуки?
Первое, что нужно проверить – это то насколько хорошо у вас натянут ремень. Дребезг и посторонние звуки могут возникнуть при слабой натяжке ремней. Что в свою очередь приводит к потере тяги и имеет тот же эффект, что и возможные проблемы с проводкой. Начните с проверки натяжения ремней на вашем 3D принтере. Если на ваш взгляд с натяжкой всё в порядке переходите к следующему пункту.
Второе, что необходимо проверить – это целостность проводки. Высокие ускорения, длительная печать, не правильная организация проводки могут приводить к повреждению кабеля от платы управления 3D принтера к шаговому двигателю.
Вы установили новый двигатель, поменяли провод или установили новую плату управления и теперь всё не работает или работает не правильно?
Итак, вы установили установили/поменяли новый шаговый двигатель NEMA или поставили новую плату управления 3D принтера. Вероятнее всего сигналы подаваемые от платы управления к двигателю теперь другие, т.е. шаговый двигатель не получает правильный или полный сигнал. Из-за этого шаговый двигатель “сходит с ума” – гремит, шумит или дергается.
Почему же не работает?
Шаговые двигатели NEMA 17 устанавливаемые на практически все 3D принтеры работают на основе обмоток, соединенных попарно, и каждая из них называется фазой. Эти фазы перемещают магниты внутри шагового двигателя. Когда проводка для этих пар не совпадают или если кабель поврежден, шаговый двигатель не может правильно вращаться, так как северный и южный полюса магнитов не могут получать правильный сигнал и правильно вращаться.
Существует огромное количество производителей как самих двигателей так и электроники, которая управляет этими двигателями. И никто из производителей не разработал стандарт подключения. Из-за этого проводки шаговых двигателей могут отличаться, а цвета проводов в кабеле которые к ним подключаются ничего не значат.

Кабели для шаговых двигателей
Кроме того, последовательность подключения к плате управления 3D принтера вряд ли будет соответствовать шаговым двигателям. Из-за этого на шаговый двигатель поступает неверный сигнал и он начнет “глючить” – дрожать, греметь или даже двигаться только в одном направлении.
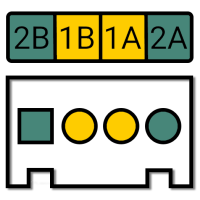
Разъем двигателя в плате BTT SKR mini E3

Разъем двигателя в плате BTT Octopus
Для некоторых плат в свою очередь есть исключения. Например, это касается плат выпускающихся для замены оригинальных 1 в 1.Для самого популярного 3D принтера Ender-3 насколько производителей выпускают платы взамен оригинально устанавливаемой на этот 3D принтер, например, BTT SKR Mini E3 V2 – это специализированная материнская плата для замены платы от Creality. И следовательно проводка в BTT SKR Mini E3 полностью совпадает с проводкой оригинальной платы управления.
Как найти правильное подключение?
Есть несколько быстрых и простых способов определить катушки шагового двигателя.
1. “Прозвонка” с помощью мультиметра.
Первое , вы можете использовать мультиметр для проверки целостности цепи. Переведите мультиметр в режим “прозвонки” цепи, который обычно имеет значок диода или зуммера.

Режим прозвонки на мультиметре

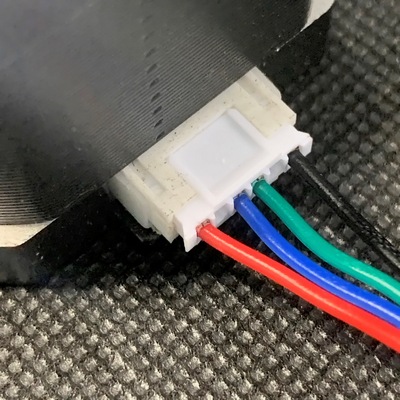
Прозвонка шагового двигателя
Затем подсоедините один щуп мультиметра к крайнему левому контакту на двигателе. Затем с помощью другого щупа проверьте один из двух средних контактов. Когда мультиметр начнет отображать значение на дисплее или издаст звуковой сигнал, это значит что вы нашли парное соединение катушку. Повторите тоже самое на правой стороне разъема: подсоедините один щуп на правый контакт двигателя, а вторым щупом проверьте один из двух средних контактов. Вы нашли контакты обмоток двигателя.
2. Поиск светодиодом
Один из самый простых и надежный методов. Возьмите обычный круглый светодиод на 3В. Подключите разъем к двигателю, а в разъем который подключается к плате вставьте светодиод. Теперь вручную прокрутите вал двигателя. Если светодиод загорелся – вы нашли контакты обмотки.

Поиск обмотки шагового двигателя с помощью светодиода
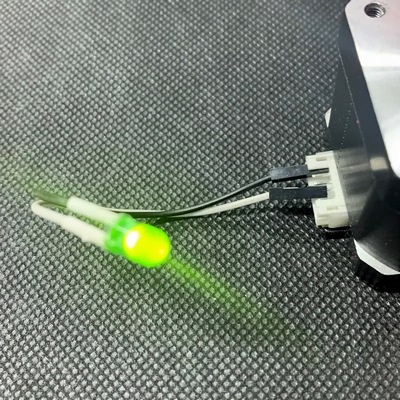
Обмотка шагового двигателя найденная с помощью светодиода
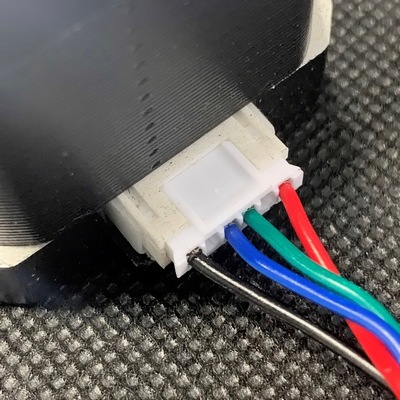
3. Поиск замыканием
Другой метод проверки соединений шагового двигателя заключается в использовании двух проводов с разъемом DuPont на одной стороне и оголенным проводом на другом. Вначале скрутите два оголенных провода вместе. Затем подключите один разъем Dupont в крайний левый контакт на двигателе а второй разъем Dupont в один из средних контактов на двигателе. Как и в случае со светодиод, поверните вал шагового двигателя. Если усилие на валу изменилось (увеличился крутящий момент), значит, вы нашли соединение обмотки.
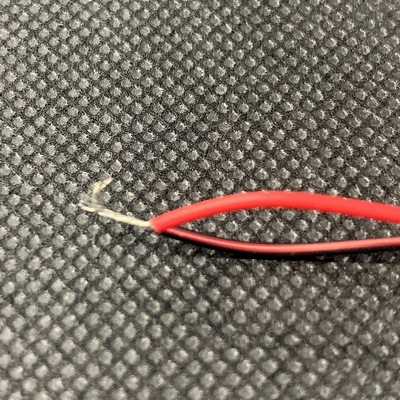
Поиск обмотки шагового двигателя скруткой
Если удачно нашли правильное подключение на двигателях, теперь стоит их сопоставить с разъемами на плате управления.
Подключение шаговый двигателей к плате управления?
Распиновка контактов шагового двигателя на BTT SKR E3
Большинство производителей плат управления для 3D-принтеров указывают распиновку контактов в технических характеристиках самих плат или в руководствах. Проверьте документацию своей платы управления на онлайн ресурсах, например GitHub. У таких производителей как BigtTeeTech, MKS, FLYmaker (Mellow Fly) обязательно есть ресурсы с подробным описанием распиновки. Как только вы найдете распиновку, вы сопоставьте найденные контакты двигателя с контактами 1А и 1B на плате управления. Затем подключите вторую обмотку к контактам 2A и 2B.
Подключили двигатель, а он движется не в ту сторону
Подключенный двигатель работает тихо, так как надо, вот только крутит не в ту сторону. Не стоит отчаиваться. Есть довольно простое решение заставить вал двигателя вращаться в правильном направлении.
Все что вам нужно сделать – это поменять местами провода обмотки. Если у вас красный + черный провод соответствуют одной обмотке, то вам необходимо поменять их местами чтобы стало черный + красный провод. Ту же операцию можно проделать и с парой средних проводов. Эту операцию необходимо проделать только на одном разъеме провода.
Смена вращения вала шагового двигателя. Было.
Смена вращения вала шагового двигателя. Стало.
Ту же операцию можно проделать и с парой средних проводов. Эту операцию необходимо проделать только на одном разъеме провода.
Как вытащить провод из кабеля шагового двигателя?
Вначале не помешает сделать фото или записать расположение контактов, чтобы запомнить начальное положение контактов проводов. Затем, с помощью пинцета или небольшой плоской отвертки поднимите защелку на разъеме. Прежде чем отпустить защелку, вытащите провод с из разъема. Постарайтесь не отломить защелку. После того как необходимые провода вытащены, вставьте их обратно, но уже на новые места разъема. Если вы решите проделать эту операцию на разъеме подключаемом к плате управления, то действия будут совпадать.

Замена проводов в шаговом двигателе
Шаговый двигатель (ШД) — бесщеточный механизм с несколькими обмотками и последовательной подачей напряжения на каждую из них. Первые экземпляры электрических моторов такого типа появились еще в 1830-х годах, и почти за 200 лет устройство претерпело значительных изменений.
Ниже рассмотрим, что это за агрегат, какие бывают виды и особенности конструкции, на каком принципе работают, и где применяются. Отдельно разберем плюсы и минусы, тонкости подключения и управления, а также другие вопросы, касающиеся разновидности мотора.
Что такое шаговый двигатель
Шаговый двигатель — электромотор, где импульсное питание током приводит к перемещению роторной части на заданный угол. Относится к классу бесколлеркторных электромоторов постоянного тока.
После его запуска создается наибольший момент при минимальной скорости, а сам двигатель показывает отличные характеристики даже в состоянии покоя.
Управление осуществляется посредством дискретных импульсов, формируемых на драйвере мотора.
Первые шаговые двигатели имели вид электромагнита, вращающего в момент включения храповое колесо. Каждое включение приводило к перемещению на одну позицию.
За время эксплуатации моторы были существенно оптимизированы с позиции конструктивных и функциональных параметров.
Сфера применения
Шаговые двигатели получили широкое применение и устанавливаются во многих механизмах.
Примеры:
- Периферийные устройства вычислительных машин.
- Станки с числовым программным управлением (ЧПУ): XY-столы, фрезерные станки, чертежные автоматы.
- Устройства компьютерной памяти.
- Оборудование для чтения оптических дисков.
- Перфоратор и считыватель ленты и т. д.
Активное применение в машиностроении получили двухфазные шаговые электродвигатели гибридного типа. Также они используются в приводах разных машин и механизмов, которые работают в режиме «старт-стоп».
Типы и конструктивные особенности
Сегодня применяется несколько видов ШД, отличающихся по конструкции, типу обмоток, особенностям управления и иным параметрам. Рассмотрим каждую классификацию более подробно.
По конструкции ротора
Многие характеристики двигателя, касающиеся скорости вращения и режима работы, зависят от ротора.
С этой позиции выделяется три вида устройства.
По типу обмоток
Плавность функционирования шагового двигателя находится в прямой зависимости от числа обмоток, поэтому на этот фактор важно обращать особое внимание.
Многие ошибочно считают, что количество обмоток зависит от числа фаз. Это не так, ведь даже 2-фазный мотор может иметь четыре и более обмотки.
Шаговые двигатели бывают:
По типу управления
Для расширения функционала и удобства применения предусмотрена система управления.
Она бывает следующих типов.
Волновая: возбуждение только одной обмотки. Недостатком является минимально доступный момент.
Полношаговая: одновременное включение обмоток.
Полушаговая: делание геометрии шагового мотора пополам. Обеспечивается увеличенное разрешение при позиционировании вала агрегата.
По типу
При выборе шаговых двигателей нужно понимать, что они бывают нескольких типов.
Кратко рассмотрим их особенности:
- Биполярные двигатели — двухфазные с угловым перемещением в 0,9 или 1,8 градуса. Разработчики гарантируют высокую точность шага без нагрузки величиной до 5%.
- С энкодером (часто называются гибридными серводвигателями). Особенность состоит в наличии инкрементального энкодера. Моторы объединяют лучшие качества серво- и шаговых электрических моторов, а цена таких устройств меньше в сравнении с сервосистемой. Применяются в комплексе с контроллером.
На рынке представлен большой выбор устройств, имеющих индивидуальные характеристики и подходящих для определенных сфер деятельности. Эти моменты необходимо учитывать при выборе модели.
Принцип работы
В зависимости от вида агрегата его конструктивные особенности могут отличаться, но общий принцип действия почти неизменный. Так, на статоре предусмотрены четыре обмотки, расположенные под 90-градусным углом.
Как только на первую обмотку подается напряжение, ротор перемещается на указанный выше угол. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжает вращаться до прохождения полного круга. Далее процесс повторяется сначала.
При желании изменить очередность вращения требуется подавать импульсы в обратном направлении. Для удобства пользователи могут управлять ШД и менять его характеристики с учетом особенностей использования.
Преимущества и недостатки
Перед применением шагового двигателя необходимо изучить его плюсы и минусы. По ним проще судить об актуальности применения оборудования для решения задач разной сложности.
Плюсы:
- Точность. При подаче напряжения на определенные обмотки ротор поворачивается на строго определенный угол.
- Продолжительный срок службы. Если следить за оборудование, проводить периодические проверки и восстановительные процедуры, шаговый двигатель способен прослужить не меньше станка.
- Часто применяется в качестве более дешевой альтернативы сервопривода. Его часто применяют для автоматизации разного рода узлов.
- Стабильность. ШД работает при разных нагрузках и не боится колебания этого параметра.
- Легкость в применении. Управление шаговым двигателем не требует специальных знаний. Разобраться в принципе действия и правилах использования может даже новичок.
- Отличные характеристики: поддержка максимального момента вращения (даже при низкой скорости), четкость фиксации после остановки.
- Простота ремонта. Имеет простую конструкцию, поэтому с обслуживанием и восстановлением не возникает трудностей.
Минусы:
- Низкий момент. ШД не могут похвастаться достаточным моментом при повышении скорости вращения. Единственный выход — улучшение динамических параметров с помощью специальных ШИМ-драйверов.
- Вибрации. Из-за дискретности шага возникают вибрации, которые неизбежно приводят к уменьшению момента вращения и появлению резонансов в системе.
- Риск нарушения позиционирования. Изменение этого параметра возможно при повышении нагрузки выше допустимого параметра.
- Небольшая эффективность. Шаговый двигатель использует много энергии даже при минимальной нагрузке.
- Трудности с набором скорости. Агрегат с трудом набирает обороты после мгновенной перегрузки.
- Риск «проскальзывания» ротора. Это известная проблема, проявляющаяся в случае повышения нагрузки выше допустимого значения. Для ее решения можно установить датчик или увеличить мощность мотора.
Это не исчерпывающий список слабых и сильных характеристик шагового механизма, но достаточный для принятия решения.
Основные характеристики
При выборе шагового двигателя необходимо смотреть на его параметры.
Выделим основные моменты:
- Количество полных шагов. От этого показателя зависит плавность и точность хода, а также разрешающая способность. В современных моделях число полных шагов должно быть в пределах 200-400.
- Сопротивление обмотки. Свидетельствует о напряжении, которое может выдать агрегат.
- Угол дискретного перемещения. Считается путем деления 360 градусов на число отдельных перемещений за оборот. Оптимальный показатель от 0,9 до 1,8 градуса.
- Индуктивность фазы. Определяет скорость увеличения тока, что актуально при ускоренном вращении вала.
- Пробивное напряжение. Максимальный параметр, при котором нарушается целостность изоляционного слоя и определяется безопасность применения.
- Сопротивление изоляции. Измеряется между каждой из обмоток и кожухом.
- Номинальный ток. Наибольший параметр, при котором возможна безопасная эксплуатация агрегата.
- Допустимое напряжение («постоянка»). Измерение осуществляется на витках. Иногда этот параметр не указывается, но в таком случае его можно посчитать по закону Ома.
Отдельное внимание важно уделить еще одному параметру — моменту. Он бывает нескольких видов:
- удерживающий: актуален в случае полной остановки и питания током двух фаз;
- крутящий: зависит от частоты вращения, указывается максимальный показатель для агрегата;
- стопорный: необходим для проворачивания вала при отсутствии питания;
- инерционный: чем ниже этот показатель, тем быстрее разгоняется двигатель.
Комплексный анализ характеристик позволяет с большей точностью подобрать устройство под решение конкретных задач.
Подключение шагового двигателя
Для подачи потенциала на обмотки ШД необходим механизм, способный выдать один или группу импульсов в конкретной последовательности. В роли таких элементов выступают полупроводниковые устройства и драйвера на базе микропроцессоров.
В них предусмотрена группа выходных клемм, каждая из которых формирует режим функционирования и подачи напряжения.
С учетом схемы подключения используются те или иные выводы устройства. Как результат, удается подобрать конкретную скорость вращения, шаг или микрошаг для перемещения в плоскости.
Всего выделяется шесть основных схем соединения:
- биполярный;
- биполярный с отводом из центральной части обмотки;
- униполярный с четырьмя фазами и подключением пары обмоток;
- четырехфазный униполярный с параллельным подключением;
- четырехфазный униполярный с последовательным соединением.
Если питание шагового двигателя осуществляется от одинакового драйвера, в отношении упомянутых выше схем можно выделять ряд особенностей:
- Отводы всегда подходят к соответствующим клеммам. При последовательном объединении обмоток повышается индуктивность обмоток и снижается ток.
- Пользователь получает паспортные параметры касательно параметров. При параллельном подключении повышается ток и уменьшается индуктивность. Если подключить обмотку по одной фазе, уменьшается момент на низких оборотах, и снижается величина тока.
- Сохраняются динамические и электрические параметры (с учетом данных в паспорте).
- Повышенный момент и использование для получения больших частот.
- Увеличение момента (используется для небольших частот вращения).
Принципиальные схемы подключения показаны ниже.
Для беспроблемной эксплуатации ШД важно помнить о тонкостях подачи номинального напряжения, скорости момента вращения и снижения линейного напряжения.
Отдельного внимания заслуживает подключение шагового двигателя к Ардуино. В этом случае управляющие выходы с драйвера подключены цифровым контактам на Arduino Uno.
Питающее напряжение равно 5 В. Дополнительно можно использовать еще один источник питания во избежание перегрева платы.
Кстати, как сделать умный дом на Arduino читайте тут https://elektrikexpert.ru/arduino.html.
Управление шаговым двигателем
Как уже отмечалось, выделяется несколько способов управления шаговым агрегатом. Каждый из вариантов имеет ряд особенностей в вопросе подачи сигналов на имеющиеся полюса.
К главным методам управления относится:
- Волновой. Особенность состоит в подаче возбуждения к одной обмотке. Именно к ней и подтягиваются роторные полюса. При этом ШД не способен выдержать большую нагрузку, ведь выдает лишь часть момента.
- Полношаговый. Суть такого управления в одновременном возбуждении двух фаз, что гарантирует наибольший момент при параллельной схеме подключения. Если соединить обмотки последовательно, будет создаваться максимальный ток и напряжение.
- Полушаговый. Комбинация двух рассмотренных выше режимов. При реализации такой схемы в шаговом моторе происходит поочередная подача напряжения. Сначала оно направляется в одну катушку, а потом сразу в обе. Как результат, гарантируется лучшая фиксация на наибольших скоростях и максимальным числом шагов.
Чтобы преодолеть инерцию и достичь более мягкого управления, применяется микрошаговая структура. Особенность — задание синусоиды с помощью многочисленной подачи импульсов.
Как результат, силы взаимодействия магнитных цепей более плавно меняются, и обеспечивается мягкое перемещение между полюсами. В итоге уменьшаются рывки во время работы.
По наличию контроллера шаговые двигатели делятся на два типа:
К наиболее популярным относится две схемы управления — от контроллера с дифференциальным входом и выходом вида «открытый коллектор».
Первый вариант отличается надежной защитой от помех с подключением прямого / инверсного сигнала к подходящим полюсам. Здесь обязательно экранирование провода, по которому подается сигнал. Это оптимальное решение для маломощных устройств.
Вторая схема отличается соединением «плюсовых» выходов контроллера, подключенных к «плюсовому» выводу. При подаче напряжения свыше 9 В требуется добавление сопротивления для снижения тока. Кроме того, с помощью такого решения можно задать нужное число шагов в определенном скоростном режиме и задать ускорение.
Драйвер шагового двигателя
Управление шаговым двигателем невозможно без применения драйвера — электронного устройства, обеспечивающего его работу с учетом сигналов управления.
Иными словами, это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Благодаря такой конструкции, обеспечивается вращение ротора ШД. Драйвер работает после подключения источника питания, обмоток самого устройства и источника управляющего сигнала.
В зависимости от вида драйвера могут решать ряд дополнительных задач:
- контроль перегрузки по току, повышения напряжения и переполюсовки;
- автоматическое снижение тока в случае длительного простоя;
- защита от эффекта обратной ЭДС;
- построение простых схем перемещения без использования компьютера (встроенный генератор частоты) и т. д.
Конструктивно драйвер состоит из контроллера и силовой части. Первая составляющая создана на базе микропроцессора и может программироваться, а вторая представляет собой полупроводниковый усилитель мощности, цель которого состоит в преобразовании подаваемых на фазы токовых импульсов.
Драйверы условно делятся на три категории (по типу доставки тока):
- Постоянного напряжения. Подает высокий потенциал по очереди на каждую из обмоток. Суммарный ток зависит от сопротивления последних, а на больших оборотах — от индуктивности. Такие драйверы имеют низкую эффективность и могут применяться только на небольших скоростях.
- Двухуровневые. Сначала подается напряжение, благодаря которому ток в обмотке поднимается до нужной величины, после чего источник потенциала выключается, а ток поддерживается источником низкого напряжения. Такие драйверы имеют более высокую эффективность и уменьшают нагрев моторов. Работают в режиме полного и половины шага.
- ШИМ-типа. Пользуются наибольшим спросом, благодаря надежности и удобству управления. Их особенность состоит в подаче на обмотку ШИМ-сигнала высокого напряжения, отсекаемого небольшим током. Такие драйверы отличаются интеллектуальностью и возможностью программирования.
Кроме того, драйверы шаговых двигателей отличаются по типу. Они бывают аналоговыми, цифровыми и с энкодером. Поговорим о них более подробно.
Аналоговые
Отличаются высокой надежностью и эффективностью, благодаря сравнительно небольшому потреблению тока.
Задача таких устройств состоит в попеременной подаче импульса в разные обмотки статора с учетом заранее заданной программы. При этом обеспечивается определенный угол и направление вращения.
Плюсы аналоговых драйверов:
- низкая цена;
- защита от КЗ и высокого напряжения;
- автоматическое снижение тока;
- отсутствие риска случайного перегрева.
К основным моделям можно отнести:
Цифровые
Это более современные модели, работающие на базе цифрового управляющего сигнала. В основе лежит 32-разрядный процессор, повышающий характеристики применяемого оборудования.
ШД, работающие с таким драйвером, выделяет низкий уровень вибрации, минимальный нагрев, небольшой уровень шума.
Преимущества цифровых устройств:
- автоматическая настройка;
- высокая производительность;
- защита от перегруза;
- больший набор функций;
- максимальное деление по шагам;
- автоматическое уменьшение напряжения на ХХ и т. д.
Популярные модели:
С энкодером
Такие драйвера представляют собой устройства, построенные на цифровом принципе и имеющие высокую реакцию. Применяются в качестве замены для более сложных систем управления, нуждающихся в высокой точности.
К особенностям относится:
- наличие обратной связи;
- поддержка момента и скорости вращения;
- гарантирование плавности передвижения и небольшого уровня шума;
- защита от токовых и иных перегрузок;
- уменьшение нагрева мотора и обеспечение его нормальной работы.
При использовании такого драйвера можно не бояться задержек в работе при сохранении максимального быстродействия.
К популярным моделям можно отнести:
- 2HSS86H — 2-фазный цифровой серводрайвер, совмещающий функции шагового и сервопривода. Применяется для оборудования, нуждающегося в высоком моменте вращения, быстродействии, рентабельности и устойчивости при 0-ой скорости. Его применение гарантирует плавность и минимальную шумность шагового мотора.
- CWDS860H — устройство нового поколения, совмещающее лучшие качества серво- и шаговых устройств. Гарантирует снижение вибрации, уменьшение шумности и большую точность позиционирования. Благодаря равномерности работы и высокой скорости реакции эта модель подходит для программ, нуждающихся в быстром перемещении на небольшие расстояния и требующие плавности в работе. Особенности модели: устойчивость при 0-ой скорости, быстродействие и рентабельность.
- HBS57 — альтернативный вариант для программ, нуждающихся в высокой производительности и повышенной надежности (там, где применяется сервопривод). В состав системы входит 3-фазный шаговый и цифровой быстродействующий драйвер. Устройство отличается высокой скоростью реакции и отсутствием рыков. Двигатель меньше греется, имеет меньший уровень шума и работает без задержек.
Кроме рассмотренных выше, бывают и другие типы драйверов, но они применяются реже.
Что такое многоосевые контроллеры
Простыми словами, многоосевые контроллеры — современные устройства с вмонтированными микропроцессорами и интегральной программируемой схемой.
Отличаются небольшими размерами и простой управления. Применяются для точного позиционирования агрегатов по двум и более осям.
Главная сфера применения — автоматизация станочного шагового двигателя, оборудованного многоординатными электрическими приводами. Их особенность состоит в поддержке нескольких языков и способности управления в режиме онлайн.
Особенности контроллеров:
- изолированные цифровые входа/выхода;
- высокий уровень производительности;
- поддержка ведомых/ведущих устройств;
- опция удаленного управления контроллером;
- поддержка интерполяции (круговой, линейной);
- большой набор цифровых и аналоговых входов/выходов, портов Интернет и ШИМ выходов.
Популярные модели:
- PoKeys57CNC — контроллер ЧПУ с восьмью осями для программ Mach3 и Mach Его особенность состоит в поддержке работы по USB- и Ethernet-интерфейсу. Для управления применяются стандартные сигналы STEP и DIR, предусмотрено до восьми драйверов шагового типа. Модель совмещается с энкодерами, ручным пультом управления, LCD-дисплеем, а также конечными выключателями. Имеется два релейных и четыре транзисторных выхода, возможность увеличения количества выходов, поддержка Modbus TSP и т. д.
- Leadshine SMC6480 — контроллер, предназначенный для позиционного управления на базе микропроцессора. В его структуру входит логическая интегральная схема, предназначенная для отправки импульсов, контроля процесса разгона и торможения, обработки входов и выходов. Устройство способно воспроизводить импульсы с частотой до 5000 кГц и выдерживать интерполяцию до четырех осей (линейную) и до двух осей (круговую). Предусмотрены индивидуальные входы / выходы аналогового и цифрового типа, ручной вход и ШИМ выход.
Кроме многоосевых контроллеров можно найти и другие устройства, к примеру, высоты плазмы. Они контролируют наличие рабочей дуги плазмы и подают команду на основную плату ЧПУ для перемещения резака.
Драйвер шарового двигателя своими руками
При желании драйвер для шарового двигателя можно сделать самостоятельно, но при условии покупки необходимого оборудования. Для начала определитесь, какой тип ЩД у вас в руках.
В биполярном устройстве всего две обмотки, поэтому количество отходящих проводов будет четыре. В униполярном двигателе обмоток больше, поэтому и количество выводов соответствующее.
Схема управления биполярным двигателем состоит из нескольких элементов:
- Генератор импульсов.
- Коммутатор.
- Силовые ключи, управляющие обмотками моторов.
Генератор собирается на базе микросхемы 555 по обычной схеме. Каждый импульс, которые выдается генератором, обеспечивает перемещение мотора на один шаг.
Коммутатор собирается на базе микросхемы 4013, а силовая часть — L239D (микросхема-драйвер).
В роли источника питания применяется две батарейки, обеспечивающие напряжение, равное пяти вольтам. После включения питания генератор подает импульсы, частоту которых можно менять с помощью корректировки сопротивления генератора.
В зависимости от применяемой схемы можно использовать реверс или подключать ШД без него.
Для обеспечения реверса собирается такая же цепочка с той разницей, что на выходе из коммутатора можно будет менять полярность на обмотках. Иными словами, при изменении принципа подключения меняется и направление вращения.
В схеме с реверсом применяется два драйвера коллекторных двигателей FAN 8082. После включения ШД можно нажимать переключатель, чтобы вращение шло в другом направлении.
Схемы подключения.
Вместо генератора можно подключить тактовую кнопку, с помощью которой легко избежать дребезга контактных групп. При желании можно даже посчитать число шагов двигателя, если это необходимо.
Особенности первого драйвера L293D (для первой схемы):
- Напряжение устройства от +5 до +15 В.
- Размер платы 60х21 мм.
- Максимальный ток 1,2 А, но на практике при токе больше 0,5 А схема начинает греться.
- Объединяемые вывода — 4, 5, 12, 13.
Особенности второго драйвера FAN 8082 (для второй схемы):
- Напряжение устройства от +5 до +15 В.
- Максимальный ток — 1,6 А.
В отличие от прошлого устройства, этот тип драйвера лучше справляется с нагрузкой. При желании, как отмечалось выше, можно использовать гаситель дребезга контактов.
Особенности шаговых двигателей с редуктором: что это, какие бывают
Шаговые двигателя с редуктором — устройства, комплектуемые цилиндрическим или червячным дополнительным механизмом (редуктором). Кратко рассмотрим особенности каждого из вариантов.
С червяным редуктором
ШД с редуктором червячного типа гарантируют больший момент вращения и активно применяются для станков с ЧПУ и устройств автоматизированного производства. Коэффициент редукции составляет от 1 к 10 до 1 к 60. Привод идет в комплекте, но без выходного вала.
Червячная передача полезна в случае, когда необходимо добиться высокого момента вращения при минимальной угловой скорости.
Особенность шаговых моторов с рассматриваемым типом редуктора отличается следующими плюсами:
- высокий КПД;
- сравнительно большая нагрузочная способность;
- минимальный люфт выходного вала;
- стабильная работа при пульсирующих режимах;
- плавность хода;
- точная фиксация позиции, благодаря опции самоторможения;
- компактность.
Устройства с червячным мотором отличается простой конструкцией и сравнительно небольшой ценой. При выборе необходимо учесть коэффициент редукции, габариты и будущий режим использования.
Примеры:
- ШД-57 мм с червячным редуктором. Могут быть необслуживаемые и с самостоятельным торможением. Поставляются без вала выходного типа. Одинарный или входной вал можно купить отдельно. Модели — PL57WG76-10 (20, 40, 60) с редукцией 1 к 10, 1 к 20, 1 к 40 и 1 к 60 соответственно.
- ШД-86 мм с червячным редуктором. Здесь условия такие же, как и в рассмотренном выше варианте. Модели — PL86WG118-10 (20, 40, 60) с редукцией 1 к 10, 1 к 20, 1 к 40 и 1 к 60 соответственно.
С цилиндрическим редуктором
Шаровые двигатели, оборудованные редуктором цилиндрического типа — стандартные устройства, имеющие несколько обмоток, где ток, подаваемый в любую из обмоток статора, вызывает движению ротора.
Последовательная активация обмоток приводит к дискретным угловым перемещениям.
Особенности таких моторов:
- высокий КПД;
- небольшая нагрузочная способность;
- минимальный люфт на выходном валу;
- стабильная работа даже в пульсирующих режимах.
Варианты исполнения:
- Униполярные. Бюджетное решение, построенное на магнитах. Устройство изготовлено из шестеренок, сделанных из пластика, а управление возможно с помощью ULN Подходит для применения с наборами Arduino в системах DIY. Модели — 28BYJ-48-12 или 28BYJ-48-5. Отличаются только сопротивлением. В первом случае 90, а во втором 30 Ом.
- ШД-57 мм (NEMA 23). Шаровые моторы на 57 м с редуктором цилиндрического типа. Момент на выходном валю — до 3 Н*м, а люфт до 1 градуса. Востребованные модели — PL57GH76-3D8, PL57GH76-5D8, PL57GH76-10D8, PL57GH76-20D8, PL57GH76-50D8.
- ШД-86 м (NEMA34). 86-миллиметровые агрегаты с люфтом до 1 градуса и моментом на выходе до 20 Н*м. Популярные модели — PL86GH113-3D14, PL86GH113-5D14, PL86GH113-10D14, PL86GH113-20D14, PL86GH113-50D14.
Дополнительные варианты: FL86STH65-2808AG3 / -BG3, FL86STH65-2808AG5 / -BG5, FL86STH65-2808AG12.5 / -BG12.5, FL86STH65-2808AG25 / -BG25, FL86STH65-2808AG50 / -BG50 и другие.
Трехфазные шаговые двигатели
Главная особенность 3-фазных шаговых моторов — возможность подключения к трем фазам постоянного тока. Они применяются в оборудовании, нуждающемся в более точном позиционировании, минимальных вибрациях и низком уровне шума. В остальном сфера использования таких ШД ничем не отличается.
Характеристики:
- угловой шаг — 1,2 градуса;
- сопротивление фазы — от 0,24 до 1,4 Ом;
- индуктивность — от 0,267 до 9,82 мГн.
Плюсы 3-фазных ШД:
- равномерный момент;
- улучшенные параметры разгона и торможения;
- сохранение рабочего момента на больших оборотах;
- минимальная шумность;
- низкая вибрация.
При выборе необходимо учитывать рабочий ток, угловой шаг, момент, индуктивность и зависимость момента / скорости. Также необходимо учесть параметры вала (его диаметр).
Шаговые двигатели для 3D принтера
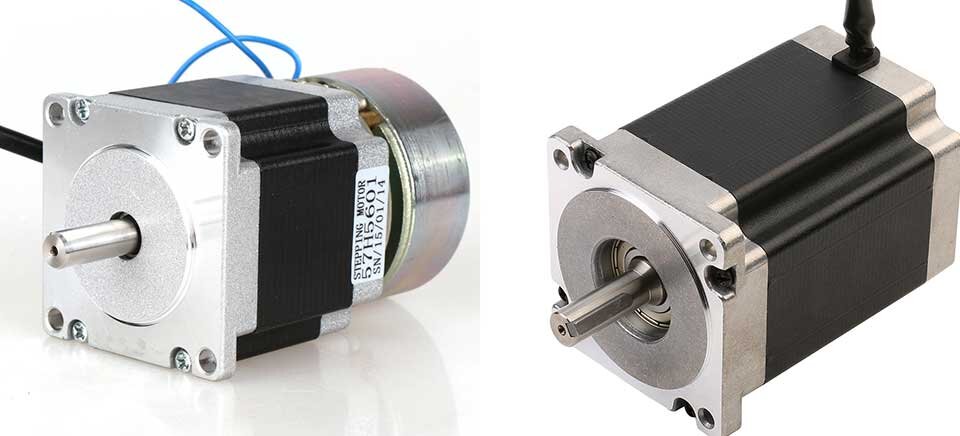
ШД для 3D принтера — небольшие устройства, отличающиеся малым весом и минимальным моментом вращения. Наиболее востребованы модели NEMA17, отличающиеся шагом в 1,8 градуса. Благодаря такой особенности, можно с большей точность настроить позиционирование устройства.
При выборе ШД для 3D принтера обратите внимание на следующие параметры:
- вес и размеры;
- диаметр вала — должен подходит для 3D-принтера по конструктивным особенностям;
- момент удержания — оптимально 2,5-4 кг;
- номинальный ток — лучший вариант 1,7 А.
Популярные модели — Nema 17, 42HM34-1334 (0.9°), Nema 23, 57HS41-2804, Nema 8, 20HS38-0604, Nema 17, 42HM48-1684 (0.9°), Nema 17, 17HS4401 с редуктором 27:1 и т. д.
Итоги
Шаговый двигатель — универсальное устройство, имеющий широкий спектр применения и отличающийся улучшенными характеристиками. Его можно использовать станках с ЧПУ, периферийных устройствах и даже 3D-принтерах. Но для правильного выбора нужно знать несколько моментов: особенности, характеристики и правила подключения.
Приветствую.
Для тех, кому лень, в самом конце картинка что куда тыкать.
Задача: Есть плата M2 Nano, нужно подключить внешний драйвер шагового двигателя,
т.к. как встроенные в неё драйвера тянут ну максимум 1 Ампер (без радиадота, с ним край 2) по току,
так что более сильные двигатели не поставить.
Увы, но на этой плате не предусмотрены выходы управляющих сигналов step и dir для шаговых драйверов, поэтому наша задача их найти. Сделать это достаточно просто.
Кстати, сигнал PUL это то же самое, что и STEP, т.е. “ШАГ” двигателя. DIR – направление. Enable нам не нужен (“прекращает удержание двигателя в одном положении”).
Взглянем на плату M2 Nano:
Легко можем найти две микросхемы встроенных драйверов с наименованием A4988 – она весьма говённая популярна и управляется как раз нужными нам сигналами step и dir, осталось только их найти.
Для этого открываем даташит (распиновку какой контакт за что отвечает): A4988.pdf и в районе 18 страницы видим назначение каждого контакта чипа:
ВАЖНО: пин с номером 1 находится физически на самом чипе там, где в углу есть выгравированный/нарисованный круг/скос.
Если смотреть на нашу плату как на первой картинке, то получается чип располагается так:
На нужно припаять проводки к 16 (STEP) и 19 (DIR) пину. Аккуратнее – расстояние между ножками чипа пол миллиметра. Напряжение там всего 5 Вольт, а ток совсем мизерный, поэтому подойдут тонкие провода. Можно их выдрать из USB кабеля зарядки телефона, если нет под рукой ничего кроме.
Теперь нам нужно выяснить общий провод управления (общий анод/общий катод), это может быть либо GND (ноль/минус питания) либо VCC (5 Вольт), лезем в даташит и выясняем, что это GND, то есть нам нужно припаяться ещё и к GND пину, т.е. управление у нас с общим катодом.
Не обязательно к ножке микроконтроллера, так как это GND, т.е. общий ноль, то он присутствует много где на плате – можно отследить по дорожкам (обязательно замерьте сопротивление между пином у самого чипа и того места, куда планируете – должно быть 0 Ом).
Теперь главное, что бы внешний драйвер так же поддерживал управление по общему катоду.
Выяснить это просто – достаточно взглянуть на колодку подключения.
Например на драйвере Leadshine DM442 (кстати, именно его я рекомендую. Ссылка на алишку: тынц. Не стоит брать дешманские драйверы – будет только разочарование в итоге)
Как видим, есть сигналы PUL+, PUL- и DIR+,DIR- это значит, что драйвер поддерживает управление как по общему аноду, так и по общему катоду.
Поэтому провод от STEP подключаем к PUL+, провод от DIR подключаем к DIR+, а провод от GND подключаем и к PUL- и к DIR- т.к. у нас управление по общему катоду.
Примерно так:
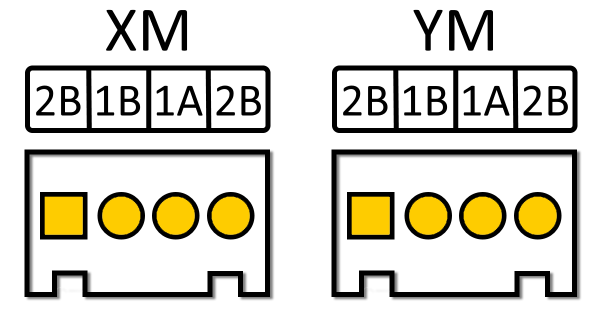
Ну и общая наглядная схема на примере замены для оси X (для Y аналогично):
ПРЕДУПРЕЖДЕНИЕ: Так как я сталкивался уже как минимум с 3 различными вариациями (похоже подделка на подделку) этого недоконтроллера, то рекомендую не бессмысленно повторять, а убедиться в правильности распиновок, т.к. могут быть “повёрнуты” чипы штатных драйверов либо отличаться их модель, отчего распиновка может не соответствовать. Так же убедитесь, что не закоротили при пайке соседние пины на чипе, как минимум необходимо глянуть хотя бы залупой.
ВАЖНО:
Так как M2 Nano нельзя настроить на произвольный размер шага, то на драйвере нужно правильно выставить дробление шага,
иначе размер не будет соответствовать! Штатный драйвер настроен на дробление 8. Т.е. один шаг состоит из 8 микрошагов.
Для правильной настройки нужно знать количество шагов на оборот Вашего шагового двигателя. У биполярных обычно это 200.
Дальше по таблице на драйвере выставляете в соответствующее положение микропереключатели.
На примере по таблице драйвера выше это получается 1600 шагов на оборот.
Либо методом подбора – там всего 16 вариантов.
Если меняете на внешние драйвера по обеим осям, то уже можете выставить наиболее приемлемое по качеству/скорости, главное что бы у обоих оно совпадало (и у движков кол-во шагов на оборот разумеется то же)!
Если на одну из осей ставите так же редуктор, то нужно выставить ещё и в соответствии с коэффициентом редукции. Если на цело не поделится, тогда придётся либо подбирать редуктор с чётным коэффициентом, либо на вторую ось ставить аналогичный, либо страдать и растягивать/сжимать макет.
Исправления/дополнения и т.д. приветствуются, т.к. мог недоглядеть чего.
Как выбрать шаговый двигатель
В статье содержатся базовые сведения о работе шагового двигателя и рекомендации по способу подбора.

В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика. Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке?
1. Тип двигателя – биполярный, униполярный, 3-фазный и т.п.
Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные – имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах. Биполярные – наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные – представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения – имеет смысл использовать 3-фазный двигатель.
2. График зависимости момента от скорости
Основная характеристика. С этим графиком можно свериться и проверить, может ли данный шаговый двигатель вообще удовлетворить условиям вашего техзадания.
3. Индуктивность
Вычислите квадратный корень из индуктивности обмотки и умножьте на 32, полученное число сравните с напряжением вашего источника питания для драйвера. Эти числа не должны сильно отличаться – если напряжение питания сильно(30 и более %) превышает полученное число, двигатель будет шуметь и греться; если же сильно не дотягивает – крутящий момент будет убывать со скоростью слишком быстро.
4. Геометрические параметры
Фланец, диаметр вала – важны как присоединительные размеры. Фланец вкупе с длиной двигателя также обрисовывает “мощность” шагового двигателя.
Теоретические сведения о режимах работы шагового двигателя
Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле и обладает свойством индуктивного сопротивления переменному току. Сопротивление тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.

Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога – ток будет ограничен индуктивностью обмоток.

В результате, скоростно-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скоростно-моментную характеристику. Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики

Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке “постоянной мощности”. Скругление на переходной точке обусловлено переходным процессом в цепи – драйвер постепенно превращается из источника тока в источник напряжения.
Резонанс на средних частотах
Шаговый двигатель сильно подвержен резонансу. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.

Мощность двигателя
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина: при выставлении на драйвере тока в 2 раза больше номинального для двигателя, мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток. Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
Напряжение питания и нагрев двигателя
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Эмпирически было получено несколько оценок для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя.

О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части.
Размеры шагового двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика – кривая скорости-момента.
Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной:

Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания – тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях – “медленный” и “быстрый”, с большой и малой индуктивностью. Причем “быстрые” модели пользуются большей популярностью – для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности – можно взять двигатель побольше. “Медленные” модели остаются для специфических применений – в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п.
обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю – он должен быть способен выдавать именно такой уровень тока.
Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку – таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Выбор двигателя сводится к выбору 5 вещей – производителя, вида двигателя, размера, тока фазы и индуктивности. Первый параметр поддается оценке с трудом – мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик – размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов – определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Вес подвижной части менее 5 кг – двигатель серии ST42 или аналогичный.
Вес подвижной части 5-10 кг – двигатель ST57-56 или аналогичный.
Вес подвижной части 10-23 кг – двигатель ST57-76 или аналогичный.
Вес подвижной части 23-35 кг – двигатель ST86-80 или аналогичный.
Вес подвижной части 35-50 кг – двигатель ST86-114 или аналогичный.
Совместно с этими оценками можно использовать оценки для размеров рабочего поля:
Рабочее поле 0,1-0,5 кв.м. – двигатели ST57-76 или аналогичные.
Рабочее поле 0,5-1 кв.м. – двигатели ST86-80 или аналогичные.
Рабочее поле 1-1,5 кв.м. – двигатели ST86-114 или аналогичные.
Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы.
Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам – проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать – обратиться за консультацией к нашим опытным специалистам.
