Не прошло и года с момента выхода прошлой статьи про прямую проводку управления, можно про компенсацию шарнирных моментов рассказать 🙂

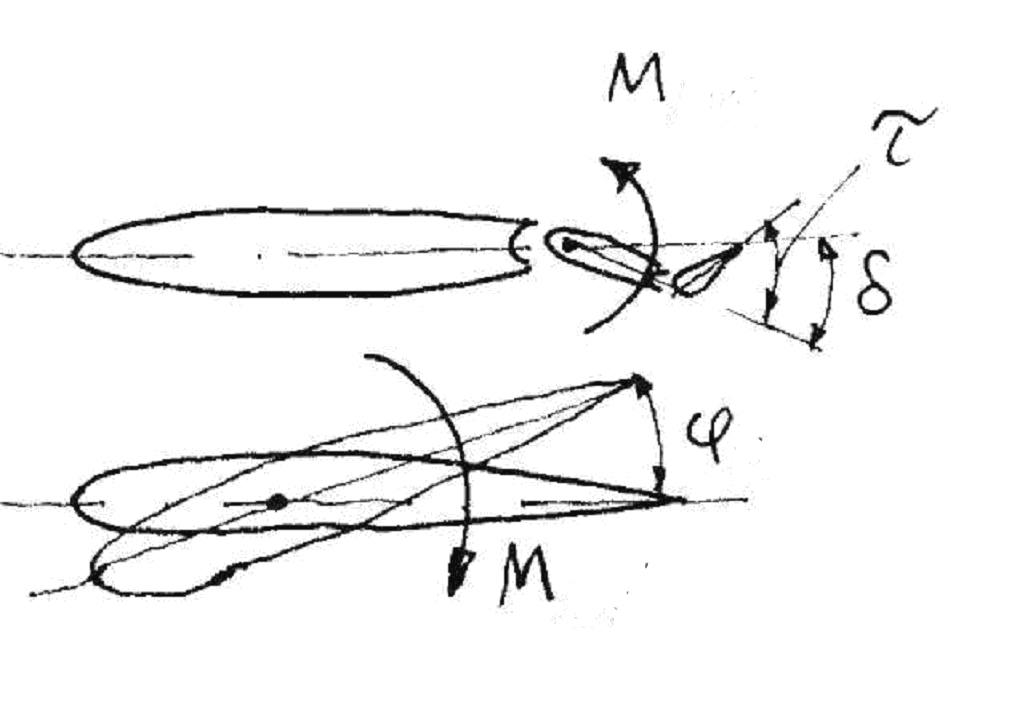
Сам термин упомянут здесь. Теперь подробнее, что это такое за момент. Взгляните на эту безобразную красивую схему:
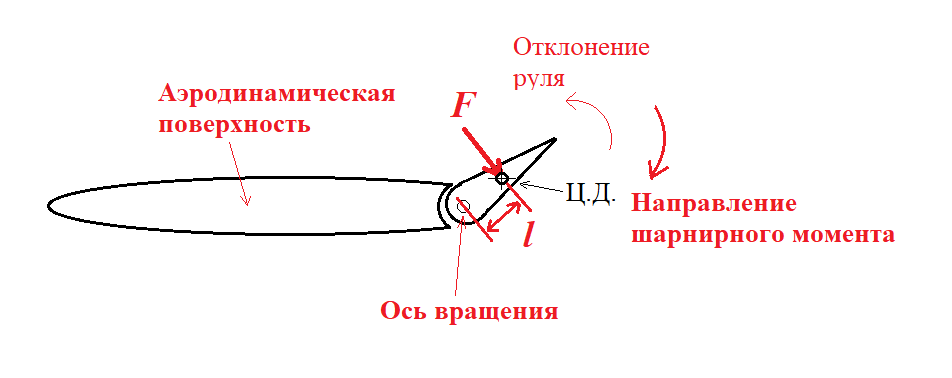
Собственно, шарнирный момент возникает при действии набегающего потока воздуха на отклоненный руль. Существует точка, называемая центром давления (обозначена на рисунке как Ц.Д.), относительно которой и можно обозначить действие аэродинамической силы F на плечо l. Произведение Fxl будет численно равно этому шарнирному моменту.
Шарнирные моменты могут достигать очень больших величин. В частности, были случаи, когда самолет с прямой проводкой управления попросту не мог выйти из крутого пикирования, потому что летчику не хватало сил отклонить штурвал из-за шарнирных моментов.
Как быть с шарнирными моментами?
1) Заниматься физкультурой
Вариант очень хороший, но не всегда подходящий 🙂
2) Применять компенсацию шарнирных моментов
А теперь переходим непосредственно к теме. В этой статье рассмотрим некоторую часть способов компенсации 🙂
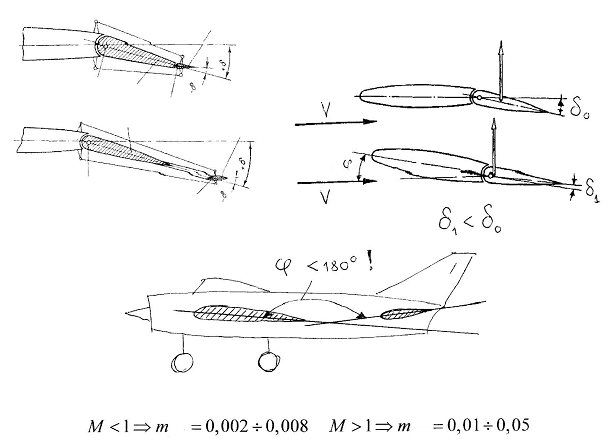
Осевая компенсация
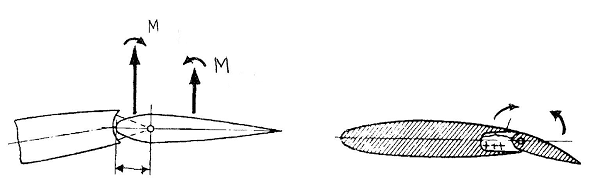
Как известно и как в данной статье упомянуто, момент – это произведение силы на плечо. Силу нельзя уменьшить, а вот плечо – можно. То есть, если подвинуть ось вращения поближе к центру давления, то шарнирный момент уменьшится и получится осевая компенсация.
Тут на схемке новое плечо обозначено l2. Раз оно меньше – то и момент меньше 🙂
Решение задачи, что называется, “в лоб”.
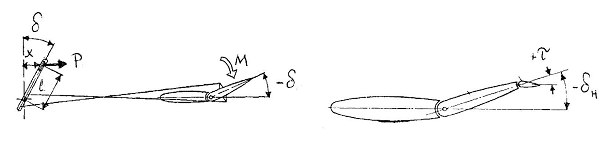
Роговая компенсация
Как говорится, клин клином вышибает. Можно не уменьшить шарнирный момент методом “в лоб”, а создать другой момент в противоположную сторону 🙂
То есть, часть руля в виде некоторого “рога” выносится в противоположную сторону от оси вращения, а момент, который будет создаваться этим “рогом”, направлен в противоположную сторону. Вот так красиво и просто 🙂
Хотя конструкция, конечно, усложняется и утяжеляется.
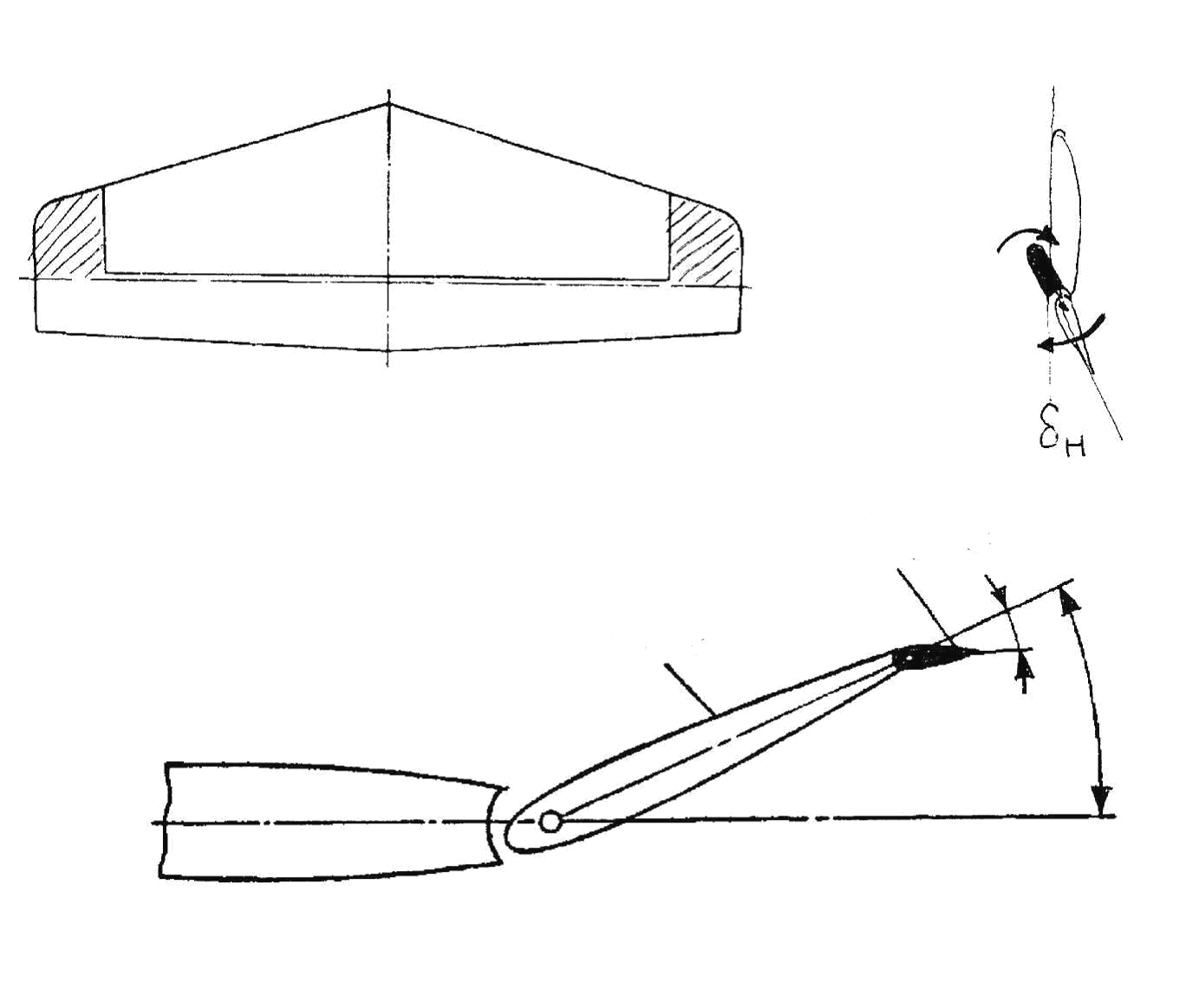
Внутренняя компенсация
Взгляните на схему. Между носком руля и несущей поверхностью (стабилизатором или чем еще) находится гибкая мембрана. При отклонении руля эта мембрана с одной стороны получает зону разрежения, с другой – зону повышенного давления (надувается). Собственно, тянет эта мембрана руль и компенсирует шарнирный момент :))
Небольшая ремарка. Важно, чтобы компенсирующий момент не был слишком большим, иначе летчику попросту не будет комфортно управлять самолетом, поскольку именно за счет шарнирных моментов он “чувствует” управление. А еще более важно, чтобы компенсирующий момент не был больше, чем шарнирный. Иначе получится перекомпенсация руля, то есть придется приложить усилие не чтобы его отклонить, а чтобы вернуть его на место в нейтраль 🙂
Спасибо за внимание, подписывайтесь. Продолжение следует 🙂
Вопрос к публике. На самой первой картинке в статье изображено хвостовое оперение самолета “Корсар”. Какие виды компенсации шарнирного момента применяются? Напишите в комментариях 🙂
Шарнирный момент. Степень статической
устойчивости самолета со “свободным
рулем”
Отклоненная от некоторого
положения рулевая поверхность испытывает
на себе действие скоростного напора
воздуха и сопротивляется отклонению.
В результате возникает так называемый
шарнирный момент
![]() ,
,
который действует относительно оси
подвески рулевой поверхности и в случае
простой механической проводки создает
усилие
![]()
на ручке управления.
Пренебрегая трением в проводке управления,
это усилие можно записать в виде:
![]()
где
![]()
– передаточный коэффициент в системе
продольного управления;
![]()
– линейное отклонение
рычага управления.
Согласно принятому правилу
знаков, положительным считается давящее
усилие на рычаге – «от себя», а
отрицательным – тянущее усилие – «на
себя». Для самолетов нормальной схемы
и схемы «бесхвостка» Кш
0,
для схемы «утка» Кш
0.
Если в
выражено в радианах, а хв
– в метрах, то Кш
имеет размерность м-1
(1/м). У самолетов различных классов Кш
изменяется в пределах
Кш
1,0…2,0 м-1.
Величина шарнирного момента определяется
формулой:
![]()
где
Sв
– площадь рулевой поверхности (руля
высоты);
bAв
– САХ рулевой поверхности;
mш
– коэффициент шарнирного
момента, определяемый в виде:
![]()
где
![]()
– угол отклонения триммера руля высоты
и производная шарнирного момента по
углу отклонения триммера.
Усилие на рычаге управления,
вызванное шарнирным моментом, определяется
по формуле
![]()
При полностью необратимой системе
гидравлического (бустерного) управления
летчик не чувствует усилий на ручке
управления от шарнирных моментов, что
недопустимо по условиям управляемости
самолета. В этом случае усилие на ручке
создается искусственно, загрузочным
механизмом. Однако об этом
ниже.
При введении понятия степени статической
устойчивости по перегрузке
![]()
считали, что положение органа управления
в ходе маневра фиксировано.
Другими словами, летчик выдерживает в
ходе маневра
![]() ,
,
а начальный этап маневра, когда
осуществляется переход к маневру с
данной перегрузкой, не рассматривается.
Соответственно, и при подсчете производной
![]()
предполагается, что при изменении
![]()
и соответствующем изменении
![]()
отклонение органов управления фиксировано.
На практике летчик контролирует
обычно не отклонение
![]()
руля, а отклонение ручки
![]() ,
,
которое связано с некоторым изменением
усилия . При однозначной
связи между
![]()
и
![]()
(рис. 2.32) эти воздействия
аналогичны.
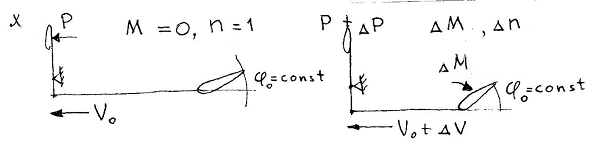
Рис.2.32
Рассмотрим установившийся маневр,
выполняемый с
![]()
Рассмотрим случай, когда шарнирный
момент руля высоты в ходе маневра
постоянен
![]()
(при обратимой системе управления это
эквивалентно маневру с постоянным
усилием на ручке управления
![]() ).
).
При этом угол отклонения руля
![]() или
или
![]()
может меняться, но таким образом, чтобы
выполнялось условие
![]() .
.
Здесь
![]()
– коэффициент шарнирного момента
руля высоты для руля высоты и ЦПГО,
соответственно

(2.60)

Тогда при определении полной производной
продольного момента по
![]()
нужно учесть, что
![]()
и
![]()
(2.61)
Частный случай условия
![]()
–
![]()
эквивалентен полету самолета со
“свободным рулем”, т.е. рулю
устанановившемуся по потоку. Если
изменяется угол атаки, то одновременно
должен меняться угол
![]()
или
![]()
и, следовательно,
![]() .
.
Тогда, учитывая, что
 ,
,
получим выражений для полной производной
(2.62)
Пренебрегая влиянием подъемной силы
оперения на подъемную силу самолета,
определим производную![]()
из условия (2.61) при
![]()
(2.63)
Подставляя (2.63) в
(2.62), получим выражение степени
статической устойчивости по перегрузке
самолета со “свободным рулем”.
(2.64)
Эта производная обозначается через
![]()
Подставляя выражение
![]()
в формулу (2.64), получим:

(2.65)
где величина
(2.66)
называется нейтральной
центровкой самолета со свободным рулем.
Последнее слагаемое
учитывает влияние отклонения руля на
положение нейтральной центровки (или
фокуса ), которые определяются
для фиксированного положения руля.
Если центр тяжести расположен в точке
![]() ,
,
то для искривления траектории не
потребуется изменение усилий на
ручке управления. Знак производной
![]() ,
,
как и в случае с закрепленным рулем,
определяет правильное направление
перемещения ручки управления.
Часто для управления самолетом используют
цельноповоротный стабилизатор.
В этом случае для обратимой системы
управления при свободной ручке управления
и однозначной связи между ручкой и
стабилизатором при изменении угла атаки
стабилизатор станет вдоль потока, и
продольный момент самолета будет равен
моменту без горизонтального оперения.
Если самолет без горизонтального
оперенья неустойчив, то при свободном
стабилизаторе условие
![]()
не будет обеспечено, и знаки управления
будут обратными.
Такая система управления недопустима.
Поэтому при цельноповоротном стабилизаторе
обязательно используются необратимое
бустерное управление. Необратимый
бустер не пропускает на ручку изменение
шарнирного момента. Поэтому для
необратимой системы показатель
![]()
не имеет смысла и
![]()
полностью характеризует устойчивость
системы. Если связь между отклонением
ручки управления и рулей не однозначна
(например, из-за упругости
проводки, наличие автоматики и т.п.), то
следует различать степень устойчивости
со свободным и фиксированным рулем
(стабилизатором) и свободной и фиксированной
ручкой управления.
Соседние файлы в предмете Конструирование летательных аппаратов
- #
- #
10.07.20221.76 Mб4Mlechin_Sluzhba_vneshney_razvedki.fb2
- #
- #
- #
- #
- #
- #
24.07.2017520 б42tehavia161.djvu
- #
24.07.2017520 б32tehavia410.djvu
- #
- #
Аэродинамическими шарнирными моментами называю? моменты аэродинамических сил, действующих на органы управления относительно их осей вращения.
Шарнирный момент считается положительным, если он стремится отклонить руль (элерон) в положительном направлении.
У самолетов с обратимой системой управления от величины шарнирных моментов зависят усилия, прикладываемые летчиком к рычагам управления. При автоматическом или ручном управлении с рулевым приводом (бустером) шарнирными моментами определяется мощность рулевого привода, отклоняющего органы управления.
Шарнирный момент любого органа управления
Мш = отш5рЬдрА0И7> (10.112)
где тш — коэффициент шарнирного момента; Sp, Ьдр — соответственно площадь и средняя аэродинамическая хорда органа управления; kon — коэффициент торможения потока в области оперения.
У современных скоростных самолетов, имеющих большие размеры органов управления и совершающих полет с большими скоростными напорами, шарнирные моменты велики. Снизить величину шарнирного момента можно уменьшением коэффициента тш при помощи аэродинамической компенсации. Рассмотрим основные виды аэродинамической компенсации.
Осевая компенсация. При смещении оси вращения назад от передней кромки часть руля, находящаяся перед осью вращения (компенсатор), создает шарнирный момент обратного знака. Это приведет к уменьшению суммарного шарнирного момента руля (рис. 10.19, а). Если ось вращения совместить с центром давления руля, шарнирный момент станет равным нулю — наступит полная компенсация. При дальнейшем смещении оси вращения назад наступит перекомпенсация и изме — . интся знак шарнирного момента.

Рис. 10.19. Основные виды аэродинамической компенсации и схема работы триммера: • ‘
о — осевая; б — внутренняя; в — сервокомпенсация; г — с помощью триммера; / — ось вращения; 2 — компенсатор; 3 — тяга управления рулем; 4 — триммер; Б — тяга управления триммером
Осевая компенсация наиболее распространена из-за простоты конструктивного выполнения и хороших аэродинамических характеристик, однако осложняется тем, что положение центра давления руля зависит от числа М полета.
Внутренняя компенсация близка по идее к осевой и чаще применяется иа элеронах (см. рис. ‘10.19, б). Шарнирный момент уменьшается благодаря моменту сил, действующих на компенсатор, расположенный в полости с узкими щелями внутри крыла (оперения). Верхняя часть полости герметически отделена от нижней гибкой диафрагмой. Компенсатор воздушным потоком не обтекается, а находится под действием разности давлений, возникающей в полости при отклонении элерона (руля). Компенсатор не вносит возмущений в поток, что особенно важно при больших числах М. Недостатком такой компенсации является ограничение диапазона отклонения органов управления, в особенности, при тонком профиле крыла (оперения).
Сервокомпеисация—это дополнительный руль, кинематически связанный с основным рулем и неподвижной частью оперения так, что при отклонении основного руля иа некоторый угол сервокомпенсатор отклоняется на пропорциональный ему угол в противоположную сторону (см. рис. 10.19, в). При этом на сервокомпенсатор действуют аэродинамические силы, уменьшающие’ шарнирный момент руля.
На легких дозвуковых самолетах применяется роговая компенсация, представляющая собой часть поверхности руля, вынесенную впереди оси вращения и расположенную у края рулей. Недостатком такой компенсации является возможность возникновения тряски оперения из-за срыва потока при больших углах отклонения руля.
Уменьшить шарнирный момент руля высоты можно также отклонением (перестановкой) подвижного стабилизатора.
Аэродинамическая компенсация, если она правильно подобрана, уменьшает шарнирный момент, но не. сводит его к нулю.
При продолжительном полете на каком-либо режиме целесообразно шарнирный момент свести к нулю. Для этой цеди применяются триммеры.
Триммер представляет собой вспомогательную поверхность на задней части руля или элерона, не связанную кинематически с отклонением руля (см. рис. 10.19, г). Управление триммером самостоятельное из кабины летчика. ■ • ‘
. Для получения нулевого шарнирного момента триммер отклоняется на соответствующий угол, противоположный по знаку углу отклонения основного руля.
При определении шарнирных моментов единственно надежным способом является экспериментальный.
Результаты обработки экспериментальных данных показывают, что в пределах плавного, обтекания коэффициенты шарнирных моментов являются Линейными функциями углов атаки (сНольження), углов отклонения рулей (элеронов) и триммера
|
тш. э=”О* + тшК + <0*э; |
(10.113) |
|
‘ш. в ~ <Г — °«г. о + тшК + <EV |
(10.114) |
|
тш. н = тшР + тш6п + тшТн- |
(10.115) |
Приближенные расчетные формулы для оценки производных шарнирных моментов при проектировании приведены в [9].
На величину коэффициента шарнирного момента значительное влияние оказывает сжимаемость воздуха. С наступлением волнового
Рис. 10.20. Примерная зависимость коэффициента тш от числа М
 кризиса центр давления на рулевых поверхностях перемещается назад и коэффициент шарнирного момента на околозвуковых скоростях резко возрастает (рис. 10.20),
кризиса центр давления на рулевых поверхностях перемещается назад и коэффициент шарнирного момента на околозвуковых скоростях резко возрастает (рис. 10.20),
Информация
Шарнирный момент

- Области знаний:
- Аэродинамика, Авиастроение
Технические характеристики
Шарнирный момент
Шарни́рный моме́нт, момент Mш M_{ш} аэродинамических сил, действующих на орган управления относительно его оси вращения. В аэродинамических исследованиях обычно пользуются коэффициентом шарнирного момента mш m_{ш} , равным mш=Mш/(qSba) m_{ш}= M_{ш}/(q S b_{a} ), где q – скоростной напор, S – площадь поверхности органа управления, bab_{a} – его средняя аэродинамическая хорда. Шарнирный момент возникает при отклонении органа управления (характеризуется значением производной mшδm_ш^ delta коэффициента шарнирного момента по углу δ delta отклонения органа управления) и при изменении угла атаки α alpha (характеризуется производной mшαm_ш^ alpha коэффициента шарнирного момента по α alpha ). Зависимости mшδm_ш^ delta и mшαm_ш^ alpha от углов δ delta и α alpha в общем случае нелинейны, поэтому важной характеристикой является максимальное значение шарнирного момента в рассматриваемом диапазоне углов отклонения органа управления и углов атаки. Шарнирный момент зависит от геометрических характеристик органа управления, режимов полёта и др. При переходе через скорость звука шарнирный момент существенно возрастает. Значение шарнирного момента определяет усилие, необходимое для отклонения органа управления; снижение этого усилия достигается компенсацией шарнирного момента.
Дата публикации: 12 января 2023 г. в 22:26 (GMT+3)
#Летательные аппараты
#Эксплуатационные свойства
| Рис. 11.28. Зависимости для шарнирного момента руля высоты |  |
ШАРНИРНЫЙ МОМЕНТ РУЛЕЙ [c.277]
Суммарный шарнирный момент руля при а = 69 = 0,1 [c.283]
У многих современных самолетов бывает необходимо компенсировать более 90% шарнирного момента рулей и элеронов. Это предъявляет очень высокие требования к точности производства небольшая ошибка в размерах может сильно изменить нагрузку на ручке или педалях. Например, если аэродинамическая компенсация вместо 98% получилась равной 97%, то вместо 2% шарнирного момента летчик воспринимает 3%, т. е. в 1,5 раза увеличивается потребное усилие летчика. [c.297]
На рис. 11.23 изображена схема управления с гидроусилителем, включенным по необратимой схеме, при которой силовой механизм (цилиндр с поршнем) воспринимает полностью шарнирный момент руля. При необратимом управлении между ручкой управления в кабине и рулем нет механической связи ручка связана лишь с золотником, управляющим доступом жидкости (гидросмеси) в ту или другую половину силового цилиндра. [c.297]
Шарнирные моменты руля [c.180]
Указанные выше изменения продольной устойчивости, эф-фективности и шарнирных моментов руля высоты существенно влияют на управляемость самолета в полете с работающими и особенно с неработающими бустерами. Чтобы представить это более наглядно, рассмотрим балансировочные кривые при различных перегрузках и зависимость от числа М важнейшего критерия продольной управляемости самолетов—величины усилия на ручке (штурвале) Р” необходимого для изменения перегрузки самолета на единицу в полете с выключенным бустером при неизменном (балансировочном) положении аэродинамического триммера руля высоты (рис. 23). [c.180]
В полете на сверхзвуковых скоростях вследствие повышения устойчивости, понижения эффективности и увеличения шарнирных моментов руля высоты к ручке требуется прикладывать давящие усилия. Эти усилия бывают настолько большими, что даже на истребителях при неработающих бустерах у летчика часто не хватает сил, чтобы их создать, т. е. достигнуть в прямолинейном полете сверхзвуковых скоростей. Если запас тяги у самолета достаточно большой, то на сверхзвуковые скорости самолет будет разгоняться с перегрузкой п > 1. И, наоборот, если при сверхзвуковой скорости откажет бустер и летчик перейдет на ручное управление, то понижение скорости до дозвуковой будет также происходить с перегрузкой п > 1, хотя и не очень значительной. [c.182]
ШАРНИРНЫЙ МОМЕНТ РУЛЯ — момент относительно оси вращения (шарниров) руля высоты или руля направления и элеронов. [c.228]
Обратимая система управления. Существуют две схемы включения гидроусилителя в проводку управления и в зависимости от этого шарнирный момент руля может восприниматься гидроусилителем полностью или частично. [c.230]
Если большая часть шарнирного момента руля воспринимается гидроусилителем и меньшая летчиком, система (как и система непосредственного управления) называется обратимой. В этом случае усилия, передающиеся на ручку (штурвал) и педали, увеличиваются с увеличением отклонения рулей. [c.230]
Возможность применения обрати.мых систем ограничивается резким увеличением воздушных нагрузок и значительным перемещением ЦД на поверхностях управления при околозвуковых и малых сверхзвуковых скоростях. При этом резко изменяются шарнирные моменты рулей и усилия на ручке (штурвале) и педалях. Поэтому применять такую систему включения гидроусилителя можно только на самолетах, не достигающих критических (звуковых и более) скоростей полета. [c.230]
Определение шарнирного момента руля [c.325]
Пример. Рассмотрим результаты экспериментального исследования шарнирного момента руля в виде поворотной консоли, проведенного в дозвуковой аэродинамической трубе малых скоростей с открытой рабочей частью. Для такого исследования использовалась та же модель консоли и приспособление для ее крепления в рабочей части, что и в работе 6.3.1 (см. рис. 6.3.1 и 6.3.2). Аналогично этой работе определялись и параметры потока в рабочей части трубы. Скоростной напор в ней 9 , = 220 [c.327]
Покажите графически примерную зависимость коэффициента шарнирного момента т , от угла отклонения руля высоты б и угла атаки изолированного оперения а (рис. 11.8). Знак момента считается положительным в направлении кабрирования (увеличения углов атаки). [c.598]
Вычислите коэффициент шарнирного момента при Мо 6 = 0,2 для полностью подвижного органа управления треугольной формы с. размерами, показанными на рис. 11.9. Профиль руля симметричный, двояковыпуклый с относительной [c.598]
На рис. 11.28 приведены примерные зависимости коэффициента шарнирного момента от угла отклонения руля высоты б и угла атаки а изолированного оперения. Наличие положительного угла атаки смещает рассматриваемую зависимость вниз, поэтому при 6=0 момент /Пщ < о, а при б < 0 т, = 0. [c.626]
Рассмотрим определение шарнирного момента на примере руля высоты,, установленного на горизонтальном оперении (рис. 1.9.10). При отклонении этого руля на некоторый угол 8 он будет испытывать действие нормальной силы Кр, приложенной в центре давления, расположенном на расстоянии Хц.д от передней кромки и от оси вращения. Принимая шарнирный момент отрицательным, если он стремится повернуть руль вверх, найдем его величину из условия Мш = — вр = — ( Сц.д — л вр) Ур, где Хвр — [c.83]
Коэффициент шарнирного момента может рассматриваться как функция углов аоп(Роп) и ( Зф ) [или аоп Фоп) и срэ (Тф )] Например, для рулей высоты /1(000. или тш = /г(аоп. Т )- В пределах сравнительно небольших углов можно написать (для симметричного профиля) [c.84]
Представляет практический интерес определение шарнирных моментов, действующих на рули, для аппарата, находящегося в состоянии балансировки. Коэффициент этого момента для рулей высоты находится из уравнений [c.84]
При вычислении шарнирного момента концевых рулей (рис. 3.5.2) будем исходить из предположения, что создаваемая ими нормальная сила определяется как часть ее полной величины для всей несущей поверхности (пилона), пропорциональная отношению площадей руля и пилона (5р/5кр).В со- [c.280]
Коэффициент шарнирного момента по углу отклонения руля [c.281]
В случае сверхзвуковых скоростей составляющую шарнирного момента по углу атаки можно определить, исходя из предположения, что отношение нормальных сил руля и всей несущей поверхности будет такое же, как их [c.281]
Производная от коэффициента шарнирного момента по углу отклонения руля может быть определена при помощи (3.4.7) для производной от коэффициента нормальной силы. Принимая во внимание эту формулу, найдем [c.281]
Концевые рули. Рассмотрим приближенную оценку шарнирного момента концевых рулей в предположении, что их нормальная сила определяется как часть полной величины для консолей, пропорциональная отношению площадей S /Sg . В соответствии с этим [c.283]
Рули, расположенные вдоль задней кромки оперения. Для дозвуковых скоростей = 0,865) статическую производную от коэффициента шарнирного момента по углу [c.283]
Коэффициент шарнирного момента по углу отклонения руля находим из (3.5.20) при йдр = оп — 0,995, кщ= 0,9, = 0 [c.284]
Недостатками, свойственными этому типу рулей, являются большие шарнирные моменты, обусловленные значительным удалением центра давления от оси вращения. Такие рули недостаточно надежны в плотных слоях атмосферы, так как для них характерна относительно широкая зона нечувствительности ( мертвый ход). Это объясняется размытостью границы струи за счет смешения продуктов сгорания с атмосферой. [c.331]
При выполнении полета на каком-либо установившемся режиме ручка Должна находиться в определенном положении. Если усилие с ручки снято триммером илн механизмом триммерного эффекта, то при отклонении ручки от этого положения она стремится вернуться к нему при прямом управлении — под действием шарнирного момента руля, при необратимом — под действием загрузочного механизма. Такое поведение ручки называется самоцентрированием. [c.300]
При малой эффективности руля направления на больших сверхзвуковых скоростях полета отклонения его при выполнении маневров со скольжением должны быть больше. Одновременно с увеличением потребных отклонений резко возрастают шарнирные моменты руля направления, что значительно затяжеляет путевое управление на сверхзвуковых скоростях (если нет бустеров в системе управления рулем направления). Тем не менее при малой путевой статической устойчивости самолета рулем направления и на сверхзвуковой скорости можно создать большие углы скольжения. [c.100]
Как известно, при переходе от дозвуковых к сверхзвуковым скоростям полета вследствие происходящего при этом смещения назад центра давления и аэродинамического фокуса крыла степень продольной статической устойчивости самолета резко возрастает (рис. 21). Так как отклонения руля высоты при сверхзвуковых скоростях не изменяют аэродинамических нагрузок на впереди лежащей поверхности стабилизатора а меняют нагрузки только на самом руле, его эффективность значительно уменьшается. Шарнирные моменты руля высоты, как и степень устойчи- [c.179]
Увеличение усилий по перегрузке является следствием следующих причин. Во-первых, при большой продольной устойчивости самолета для изменения перегрузки необходимо создавать рулем высоты большие аэродинамические моменты, т. е. отклонять руль на большую величину, даже если бы эффективность руля Ьставалась такой же, как при дозвуковых скоростях. Во-вторых, эффективность руля при переходе к сверхзвуковым скоростям существенно уменьшается (см. рис. 21), поэтому потребные отклонения руля для создания перегрузки дополнительно увеличиваются. В-третьих, усилия, которые должен приложить летчик к ручке (штурвалу) управления для отклонения руля на один градус, при этом значительно возрастают. Если, например, устойчивость самолета увеличивается в пять раз, эффективность руля уменьшается вдвое, а коэффициент шарнирного момента руля увеличивается в два с половиной раза, то усилия на единицу перегрузки при переходе к сверхзвуковым скоростям возрастут в 25 раз. [c.181]
Для имитации усилий, возрастающих по мере увеличения угла отклонения руля, в систему управления включается загрузочный механизм. В этом случае пилот преодолевает усилие не от шарнирного момента руля, а от сжатия или растяжения пружины загрузочного механизма. К загрузочному устройству подсоединяется так называемый механизм триммерного эффекта. При включении этого механизма снимается по желанию пилота при длительном полете усилие с ручки (педали). Получается эффект, равноценный действию триммера. [c.230]
Шарнирный момент.-Существенной для оценки рулей является величина их шарнирного момента, представляющего собой аэродинамический момент относительно оси вращения, который надо преодолеть при отклонении рулей. Величина этого момента Л1 , =/Пщ5р6ср <7оп> где-— коэффициент шарнирного момента 5р и — площадь и средняя хорда руля — скоростной напор у оперения. [c.83]
Данные об определении шарнирного момента используются при исследовании важного свойства летательного аппарата, которое связано с его статической устойчивостью при полете со свободными рулями. В этом случае рули занимают положение свободного равновесия, при котором шарнирный момент равен нулю, т. е. /Пша+т б = О (индекс ош> опускаем). Коэффициент момента тангажа, действующего на аппарат, определяется из выражения тгсв= Шга+Шг б . [c.84]
При дозвуковых скоростях зависимости для шарнирных моментов таких органов управления были получены И. В. Остославским 129]. Рассмотрим эти зависимости, уточнив их за счет поправочных множителей, учитывающих влияние интерферейции с корпусом. В случае дозвуковых полетов для обычных рулей или элеронов (без аэродинамической компенсации), расположенных на крыле, производная по углу атаки от коэффициента ша )нирного момента [c.280]
Изменение шарнирного момента, вызванное аэродинамической компенсацией, может быть учтено при помощи некоторого коэффициента, меньшего единицы. По расчетам И. В. Остославского, величина этого коэффициента может быть принята равной [1 — 3,6(5р.к/5р)1 (где 5р.к, 5р — площади соответственно компенсатора и всего руля). [c.281]
Предположим что поворотное оперение расположено за крыльями (см. рис. 2.5.16). В этом случае следует учесть влияние на шарнирный момент скоса потока перед рулями. В примере2.5.1 была найдена производная Ids/da) = 0,309, а в примере 3.2.1 — производная [d /(dh )к, J 0,267. Согласно формуле (3.5.16) и аналогичному выраже- [c.283]
Для расчета шарнирного момента при сверхзвуковых скоростях (М,с= 1,5) воспользуемся формулой (3.5.22). Примем, что центрлавлення руля в виде плоской пластинки расположен на расстоянии от его передней кромки ( д д)а = (- ц д)5 = 0,5 Ь = = 0,5 0,75 = 0,375 м. Эта величина определяет плечи = = 0,375 м. В соответ- [c.284]
Представляют интерес опытные данные об исследовании цилиндрических насадков ([54], 1958, № 565). Вид насадка и зависимость управляющего усилия от угла поворота, длины насадка и давления в камере двигателя приведены на рис. 4.5.1. Для исследуемой схемы поворотного насадка шарнирный момент достигал 1,54 кгс-см (0,151 Н-м)на 1 кгс боковой управляющей силы, в то время как для центрального газового руля эта величина составляла 0,92 кгс-см/кгс (9,2-10 Н-м/Н). Потери тяги оказались незначительными и практически не зависящими от устройства входной части насадка. Можно ожидать, что от вида конструкции в значительной степени зависит эрозионная стойкость цасадка. Опыты показывают, что оптимальная длина цилиндрического насадка близка к 1,5 его диаметра. [c.327]
Несмотря на указанные недостатки, газовые рули находят широкое применение. Это объясняется относительной простотой конструкции руля и компоновки управляющего устройства, а также малой величиной шарнирного момента, обусловленной использованием газоаэродинамической компенсации. Важное положительное свойство таких рулей связано с линейностью рабочих характеристик (т. е. линейной зависимостью управляющих сил от угла поворота). Существенным является то, что крепление газовых рулей у выходной части сопла летательного аппарата повыщает прочностные характеристики летательного аппарата,увеличивая жесткость кормовой части и раструба сопла. [c.329]
