В этой статье мы поговорим о том, как найти нормальную силу при движении по окружности. Продолжайте читать эту статью.
Даже при круговом движении нормальная сила действует нормально, т. е. перпендикулярно движущемуся объекту. Для разных случаев существуют разные формулы для нахождения нормальной силы.. Давайте рассмотрим несколько подходов и задач, чтобы понять, как найти нормальную силу при круговом движении.
Когда тело движется по окружности окружности, т. е. по круговой траектории, движение называется круговым. Он может быть равномерным, когда угловая скорость постоянна на протяжении всего пути, или может быть неравномерным, когда скорость постоянно меняется.
Чтобы понять циркуляр, возьмем пример вашего потолочного вентилятора. Лопасти вентилятора движутся по окружности вокруг центральной точки. Некоторые другие примеры — колесо обозрения, вращение Земли и многие другие.
Тела, движущиеся по круговой траектории, сила, действующая на нее, называется центростремительной силой. В физике это Равнодействующая сила действующее на тело, движущееся по окружности. Направление этой силы всегда к центру.

Чему равна нормальная сила тела, совершающего круговое движение??
На любой объект, совершающий круговое или прямолинейное движение, обязательно действуют две силы; сила гравитации и нормальная сила (если она соприкасается с поверхностью). Таким образом, и для кругового движения существует нормальная сила.
Мы знаем, как найти нормальную силу с коэффициентом трения. Теперь нам нужно знать, как найти нормальную силу при круговом движении.
Прежде чем начать, нам нужно знать две вещи: центростремительная сила — это сумма нормальной силы и веса. И следующее, что всегда действует по направлению к центру. У нас есть формула центростремительной силы как:
F = mv2/r

Теперь на приведенном выше рисунке показан объект, движущийся по круговой траектории, начиная с точки B. В точке B мы видим, что вес W действует вниз. Нормальная сила N действует перпендикулярно объекту, а центростремительная сила F действует по направлению к центру. Теперь у нас есть:


Теперь частицы движутся в точку А. Здесь мы видим, что и центростремительная сила, и нормальная сила действуют в одном направлении, тогда как вес действует вниз. Итак, у нас есть

Как найти нормальную силу, действующую на петлю??
Петля, похожая на американские горки или колесо обозрения, является примером кругового движения. В каждой точке кругового движения действуют две силы: гравитационная сила, которая тянет объект вниз, и нормальная сила, направленная вверх, чтобы объект двигался по рельсу.
Теперь происходит то, что в верхней части петли, если нет рельса, объект будет продолжать двигаться в том же направлении (вверх) в течение некоторого времени. Но поскольку на объект действует гравитация, она тянет его вниз, поэтому объект меняет свое направление и движется по кривой траектории. Это происходит на каждом повороте, и поэтому объект движется по петле круговым движением.
Теперь в верхней части петли нормальная сила будет:
N=(мв2/r)-мг
А в нижней части петли нормальная сила будет:
N=(мв2/р)+мг
Итак, это было все о том, как найти нормальную силу в круговом движении. Теперь давайте рассмотрим несколько проблемных примеров.
Задачи на нахождение нормальной силы при круговом движении
Рассчитать нормальная сила, действующая на тело массой 5 кг, движущееся со скоростью 10 мс-1 в нижней части петли. Радиус петли 2 м.
Решение: Нам дается:
m = 5 кг
г = 2 м
v = 10 мс-1
Следовательно, нормальная сила:
N=(мв2/р)+мг
N=(5*102)/2)+(5*10)
N = 300 ньютонов
Вычислите нормальную силу, действующую на водителя автомобиля на вершине круглого холма. Автомобиль движется со скоростью 9 м/с, а масса водителя 70 кг. Радиус круглой горки 100 м.
Решения: Нам дано:
m = 70 кг
г = 100 м
v = 9 мс-1
Следовательно, нормальная сила:

Часто задаваемые вопросы (FAQ)
Объясните круговое движение на примерах.
При круговом движении тело движется по круговым кривым.
Колесо обозрения является основным примером кругового движения. Он движется по фиксированной круговой траектории вместе с фиксированной точкой. Некоторыми другими примерами кругового движения являются спутники, вращающиеся вокруг Земли.
Что такое центростремительная сила?
Центростремительная сила – это полная сила, возникающая при круговом движении.
Без центростремительной силы тело не сможет двигаться по круговым кривым; он будет продолжать двигаться в том же направлении. Центростремительная сила всегда действует к центру и по радиусу.
Как найти нормальную силу при круговом движении?
Весовая составляющая и нормальная сила вместе составляют центростремительную силу.
Для любого объекта, движущегося по круговой траектории, нормальная сила не остается неизменной. На вершине кругового пути нормальная сила определяется формулой:
N=(мв2/r)-мг
Нормальная сила, действующая на дно кругового пути, равна:
N=(мв2/р)+мг
Является ли нормальная сила такой же, как центростремительная сила?
Нет, необязательно, чтобы нормальная сила всегда равнялась центростремительной силе объекта. Обычно это зависит от положения объекта на кривой.
На тело, движущееся по окружности, действует множество сил. При описании его движения нужно учесть все силы и правильно определить их направление. В этом вам поможет таблица:
| Сила | Направление |
| Сил тяжести | Вертикально вниз |
| Сила реакции опоры | Перпендикулярно опоре |
| Сила натяжения нити | Вдоль оси подвеса |
| Сила упругости | Противоположно деформации |
| Сила трения | Противоположно направлению движения или возможного движения |
| Сила сопротивления | |
| Центростремительная сила | К центру окружности |
Алгоритм решения задач на движение тела по окружности с постоянной по модулю скоростью
Последовательность действий
- Изображение тела.
- Отображение всех сил, действующих на тело. Прикладывать их следует к центру тела. На чертеже также указывается направление центростремительного ускорения.
- Выбор системы координат. Ее начало должно совпадать с центром тела. Желательно, чтобы одна из ее осей совпадала с направлением ускорения, а другая была бы перпендикулярна ей.
- Построение проекций сил на оси ОХ и ОУ.
- Выражение искомой величины через известные данные.
- Вычисление путем подстановки в формулу, выведенную для нахождения искомой величины, известных данных.
Частные случаи движения тела по окружности
Автомобиль на повороте |
|
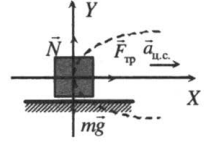 |
Второй закон Ньютона в векторной форме: |
|
mg + N + Fтр = maц.с. |
|
| Проекция на ось ОХ: | |
|
Fтр = maц.с. |
|
| Проекция на ось ОУ: | |
|
N – mg = 0 |
|
Тело на вращающемся диске |
|
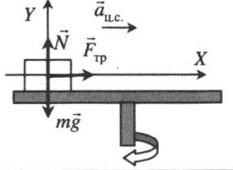 |
Второй закон Ньютона в векторной форме: |
|
mg + N + Fтр = maц.с. |
|
| Проекция на ось ОХ: | |
|
Fтр = maц.с. |
|
| Проекция на ось ОУ: | |
|
N – mg = 0 |
|
Конический маятник |
|
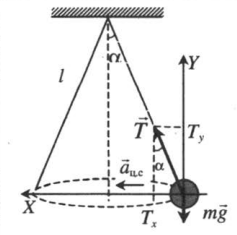 |
Второй закон Ньютона в векторной форме: |
|
T + mg = maц.с. |
|
| Проекция на ось ОХ: | |
|
T sinα = maц.с. |
|
| Проекция на ось ОУ: | |
|
T cosα – mg = 0 |
|
| Учтите, что: mg tgα = maц.с. | |
| Радиус окружности, по которой происходит движение тела: R = l sinα |
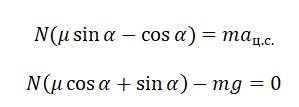
Пример №1. Автомобиль совершает поворот на горизонтальной дороге по дуге окружности. Каков минимальный радиус окружности траектории автомобиля при его скорости 18 м/с и при коэффициенте трения шин о дорогу 0,4?
Проекция сил, действующих на автомобиль, на проекцию ОХ в данном случае равна:
Fтр = maц.с.
Выразим силу трения через силу реакции опоры:
μN = maц.с.
μmg = maц.с.
После взаимоуничтожения масс остается:
aц.с. = μg
Также известно, что центростремительное ускорение определяется формулой:
Приравняем правые части уравнений:
Выразим радиус окружности, по которой движется автомобиль:
Задание EF18920
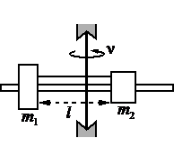 На вертикальной оси укреплена гладкая горизонтальная штанга, по которой могут перемещаться два груза массами m1 = 200 г и m2 = 300 г, связанные нерастяжимой невесомой нитью длиной l = 20 см. Нить закрепили на оси так, что грузы располагаются по разные стороны от оси и натяжение нити с обеих сторон от оси при вращении штанги одинаково (см. рисунок). Определите модуль силы натяжения Т нити, соединяющей грузы, при вращении штанги с частотой 600 об/мин.
На вертикальной оси укреплена гладкая горизонтальная штанга, по которой могут перемещаться два груза массами m1 = 200 г и m2 = 300 г, связанные нерастяжимой невесомой нитью длиной l = 20 см. Нить закрепили на оси так, что грузы располагаются по разные стороны от оси и натяжение нити с обеих сторон от оси при вращении штанги одинаково (см. рисунок). Определите модуль силы натяжения Т нити, соединяющей грузы, при вращении штанги с частотой 600 об/мин.
Алгоритм решения
1.Записать исходные данные. Перевести их в СИ.
2.Сделать чертеж, обозначив все силы, действующие на систему тел, их направления. Выбрать систему координат.
3.Записать второй закон Ньютона в векторной форме для каждого из тел.
4.Записать второй закон Ньютона для каждого из грузов в виде проекций на ось ОХ.
5.Вывести формулу для радиуса окружности, по которой движется любой из грузов.
6.Вывести формулу для вычисления силы натяжения нити, подставить известные данные и произвести вычисления.
Решение
Запишем исходные данные, сразу переведя их в СИ:
• Масса первого груза m1 = 200 г = 0,2 кг.
• Масса первого груза m2 = 300 г = 0,3 кг.
• Длина нити l = 20 см = 0,2 м.
• Натяжение нити с обеих сторон одинаково, следовательно: T1 = T2 = T.
• Частота вращения штанги ν = 600 об./мин. = 10 об./с.
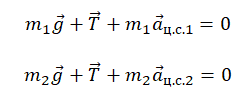
Сделаем чертеж, обозначив все силы. Учтем, что сила натяжения нити равна с обеих сторон. Выберем систему координат, в которой ось ОУ параллельна оси вращения.
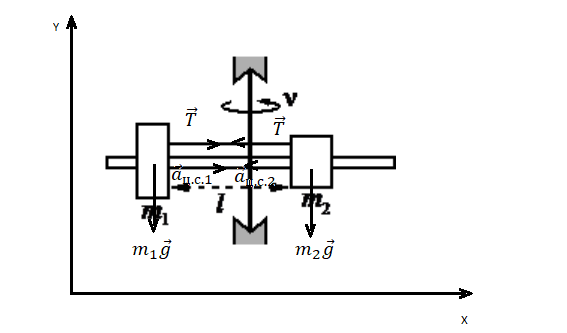
Запишем второй закон Ньютона для первого и второго груза соответственно:
Запишем проекции на ось ОХ для каждого из тел:
T = m1aц.с.1
T = m2aц.с.2
Центростремительное ускорение также определяется формулой:
aц.с. = ω2R
Угловая скорость определяется формулой:
ω = 2πν
Следовательно, центростремительное ускорение равно:
aц.с. = 4π2ν2R
Применим эту формулу для обоих грузов:
aц.с.1 = 4π2ν2R1
aц.с.2 = 4π2ν2R2
Сумма радиусов окружностей, по которым вращаются грузы, есть длина нити:
R1 + R2 = l
Выразим радиус окружности, по которой вращается второй груз:
R2 = l – R1
Так как грузы связаны между собой, и ни один из них не перевешивает другой:
m1gR1 = m2gR2
Ускорение свободного падения взаимоуничтожается. Получаем:
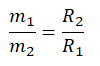
Подставим радиус второй окружности и выразим радиус первой окружности:

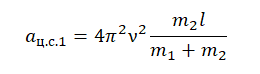
Следовательно, центростремительное ускорение первого груза равно:
Теперь возьмем проекцию на ось ОХ для первого тела и вставим в формулу найденное центростремительное ускорение для первого тела:
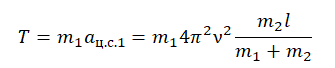
Подставим известные данные и вычислим силу натяжения нити:

pазбирался: Алиса Никитина | обсудить разбор
Задание EF18982
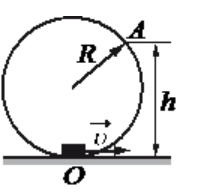 Небольшая шайба массой m=10 г, начав движение из нижней точки закреплённого вертикального гладкого кольца радиусом R=0,14 м, скользит по его внутренней поверхности. На высоте h=0,18 м она отрывается от кольца и свободно падает. Какую кинетическую энергию имела шайба в начале движения? Сделайте рисунок с указанием сил, действующих на шайбу в точке А.
Небольшая шайба массой m=10 г, начав движение из нижней точки закреплённого вертикального гладкого кольца радиусом R=0,14 м, скользит по его внутренней поверхности. На высоте h=0,18 м она отрывается от кольца и свободно падает. Какую кинетическую энергию имела шайба в начале движения? Сделайте рисунок с указанием сил, действующих на шайбу в точке А.
Алгоритм решения
1.Записать исходные данные. Перевести единицы измерения величин в СИ.
2.Сделать чертеж и указать все силы, действующие на шайбу в точке А. Указать их направление и выбрать систему координат.
3.Записать второй закон Ньютона в векторной форме.
4.Записать второй закон Ньютона в виде проекций на ось ОХ.
5.Записать формулу, определяющую кинетическую энергию тела.
6.Применить геометрические законы для нахождения величины радиуса кольца и формулу центростремительного ускорения для нахождения скорости тела.
7.Записать решение в общем виде, подставить исходные данные и произвести вычисления.
Решение
Запишем исходные данные:
• Масса шайбы m = 10 г = 0,01 кг.
• Радиус кольца, по которому перемещалась шайба, составляет R = 0,14 м.
• Высота, с которой шайба упала, равна h = 0,18 м.
Сделаем чертеж. Выберем систему координат такую, чтобы направление линейной скорости шайбы в точке совпадала с направлением оси ОУ.
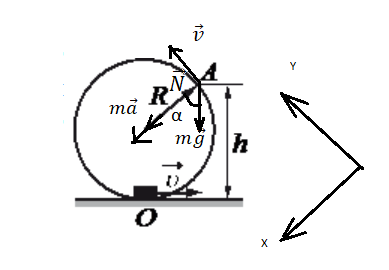
Запишем второй закон Ньютона в векторной форме:
Под ускорением в этой записи понимается полное ускорение, составляющими которого является центростремительное и тангенциальное ускорение, направленное касательно к окружности (на рисунке мы его не обозначили, так как оно нам не понадобится).
Запишем проекцию на ось ОХ. Учтем, что в точке А шайба отрывается от кольца и падает. Следовательно, нормальная реакции опоры равна нулю:
mg cosα = maц.с.
Кинетическая энергия тела определяется формулой:
Выразим центростремительное ускорение из проекции на ось ОХ:
Но центростремительное ускорение также определяется формулой:
Приравняем правые части уравнений и получим:
Квадрат скорости будет равен:
![]()
Следовательно, кинетическая энергия равна:
Чтобы избавиться от неизвестных величин, обратимся к геометрии:
Из рисунка видно, что высота h есть сумма радиуса окружности и произведения радиуса на косинус угла α:
h = R + Rcosα
Отсюда следует, что:
Rcosα = h – R
Подставим это выражение в формулу кинетической энергии и выполним вычисления:

Отсюда следует, что кинетическая энергия шарика в начале движения равна 2 мДж.
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18678
Высота полёта искусственного спутника над Землёй увеличилась с 400 до 500 км. Как изменились в результате этого скорость спутника и его потенциальная энергия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличилась |
| 2) | уменьшилась |
| 3) | не изменилась |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
| Скорость
спутника |
Потенциальная энергия спутника |
Алгоритм решения
1.Записать закон всемирного тяготения и формулу центростремительного ускорения для движения тела по окружности с постоянной по модулю скоростью.
2.Установить зависимость скорости от высоты спутника над поверхностью Земли.
3.Записать формулу потенциальной энергии и установить, как она зависит от высоты.
Решение
На спутник действует сила притяжения Земли, которая сообщает ему центростремительное ускорение:
F=maц=GmM(R+h)2
Отсюда центростремительное ускорение равно:
aц=GM(R+h)2
Но центростремительное ускорение также равно:
aц=v2(R+h)
Приравняем правые части выражений и получим:
GM(R+h)2=v2(R+h)
v2=MG(R+h)(R+h)2=MG(R+h)
Квадрат скорости спутника обратно пропорционален радиусу вращения. Следовательно, при увеличении высоты увеличивается радиус вращения, а скорость уменьшается.
Потенциальная энергия спутника определяется формулой:
Ep = mgh
Видно, что потенциальная энергия зависит от высоты прямо пропорционально. Следовательно, при увеличении высоты потенциальная энергия спутника тоже увеличивается.
Верная последовательность цифр в ответе: 21.
Ответ: 21
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17513
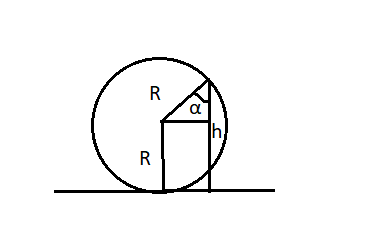
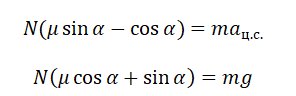
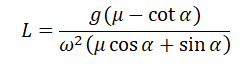
Полый конус с углом при вершине 2α вращается с угловой скоростью ω вокруг вертикальной оси, совпадающей с его осью симметрии. Вершина конуса обращена вверх. На внешней поверхности конуса находится небольшая шайба, коэффициент трения которой о поверхность конуса равен μ. При каком максимальном расстоянии L от вершины шайба будет неподвижна относительно конуса? Сделайте схематический рисунок с указанием сил, действующих на шайбу.
Алгоритм решения
1.Построить чертеж. Указать все силы, действующие на шайбу. Выбрать систему координат.
2.Записать второй закон Ньютона для описания движения шайбы в векторном виде.
3.Записать второй закон Ньютона в виде проекций на оси.
4.Через систему уравнений вывести искомую величину.
Решение
Так как шайба вращается, покоясь на поверхности конуса, на нее действуют четыре силы: сила трения, сила тяжести, сила реакции опоры и центростремительная сила. Изобразим их на чертеже. Выберем систему координат, параллельную оси вращения.

Второй закон Ньютона в векторном виде выглядит следующим образом:
Теперь запишем этот закон в проекциях на оси ОХ и ОУ соответственно:
Так как шайба покоится относительно поверхности конуса, сила трения равна силе трения покоя:
Максимальное значение силы трения равно:
![]()
Принимая в учет силу трения покоя, проекции на оси ОХ и ОУ примут следующий вид:
Запишем систему уравнение в следующем виде:
Поделим первое уравнение на второе и получим:
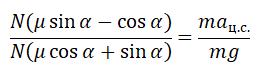
Сделаем сокращения и получим:
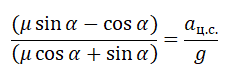
Отсюда центростремительное ускорение равно:
Но также известно, что центростремительное ускорение равно произведению квадрата угловой скорости на радиус окружности:
![]()
Радиус окружности, по которой вращается шайба вместе с конусом, можно вычислить по формуле:
Отсюда центростремительное ускорение равно:
![]()
Выразим искомую величину L:
Подставим в это выражение выведенную для центростремительного ускорения формулу и получим:
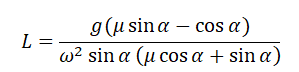
Поделим числитель на синус угла α, чтобы упростить выражение, и получим:
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 4.5k
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период вращения T – это время, за которое тело совершает один оборот.
Частота вращение – это количество оборотов за одну секунду.
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено – это есть период T. Путь, который преодолевает точка – это есть длина окружности.
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение – изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Эта и следующая главы посвящены вращательному движению объектов самой разной природы: от космических станций до пращи. Именно такое движение стало причиной того, что наша планета имеет круглую форму. Если вам известны основные свойства прямолинейного движения и законы Ньютона (они подробно описываются в двух первых частях этой книги), то вы сможете быстро овладеть основами вращательного движения. Даже если вы позабыли некоторые сведения из прежних глав, не беда, ведь к ним всегда можно вернуться в случае необходимости. В этой главе представлены основные понятия вращательного движения: угловая скорость угловое ускорение, тангенциальное ускорение, момент силы и т.п. Однако довольно слов, приступим к делу!
Для такого перехода нужно изменить уравнения, которые использовались ранее для описания прямолинейного движения. В главе 7 уже упоминались некоторые эквиваленты (или аналоги) из мира прямолинейного и вращательного движения.
Вот как выглядят основные формулы прямолинейного движения, которые подробно описываются в главе 3:
По аналогии можно легко вывести основные формулы вращательного движения:
- ( omega=Delta<theta>/Delta ) , где ( omega ) — угловая скорость, ( Delta <theta>) — угол поворота, ( Delta ) — время поворота на угол ( Delta <theta>) ;
- ( alpha=Delta<omega>/Delta ) , где ( alpha ) — угловое ускорение, ( Delta <omega>) — изменение угловой скорости, ( Delta ) — время изменения угловой скорости;
- ( theta=omega_0(t_1-t_0)+<>^1!/!_2a(t_1-t_0)^2 ) , где ( omega_0 ) — это начальная скорость;
- ( omega^2_1-w^2_0=2as ) , где ( omega_1 ) — это конечная скорость.
Разбираемся с параметрами вращательного движения
В физике движение принято разделять на поступательное и вращательное. При поступательном движении любая прямая, связанная с движущимся объектом, остается параллельной самой себе. При вращательном движении все точки тела движутся по окружностям. Тангенциальным движением называется часть вращательного движения, происходящего по касательной к окружности вращения, а радиальным (или нормальным) движением — часть вращательного движения, происходящего перпендикулярно (по нормали) к касательной, т.е. вдоль радиуса окружности.
Параметры прямолинейного поступательного и вращательного движений можно связать следующими формулами:

Допустим, колеса мотоцикла вращаются с угловой скоростью ( omega ) , равной 21,5 ( 21,5pi ) радиан в секунду. С какой скоростью едет мотоцикл? Чтобы дать ответ на этот вопрос, достаточно воспользоваться простой формулой связи линейной и угловой скорости.
Вычисляем линейную скорость вращательного движения
Скорость тангенциального движения материальной точки принято называть линейной скоростью вращательного движения. На рис. 10.1 приведен пример вращения мячика для игры в гольф по окружности с радиусом ( mathbf ) и линейной скоростью ( mathbf ) . Скорость ( mathbf ) является векторной величиной, т.е. обладает величиной и направлением (подробнее о векторах рассказывается в главе 4), перпендикулярным радиус-вектору ( mathbf ) .
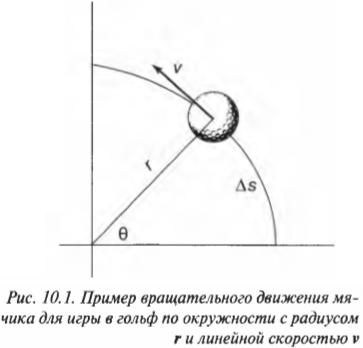
Угловая скорость связана с линейной скоростью соотношением ( v=romega ) , которое легко интуитивно понять. При одинаковой угловой скорости, чем дальше материальная точка от центра окружности вращения, тем больше ее линейная скорость.
Попробуем получить уже упомянутую выше формулу связи линейной и угловой скорости ( v=romega ) . Длина окружности ( L ) радиуса ( r ) выражается известной формулой ( L=2pi r ) , а полный угол, который охватывает окружность, равен ( 2pi ) радиан. Соответственно, длина дуги окружности длиной ( Delta s ) , охватывающая угол ( Deltatheta ) , равна:

Из формулы прямолинейного движения

путем подстановки выражения для ( Delta s ) получим:


где ( omega ) — угловая скорость, ( Delta <theta>) — угол поворота, ( Delta ) — время поворота на угол ( Delta <theta>) , то:

Теперь можно легко и просто дать ответ на вопрос, поставленный в конце предыдущего раздела, т.е. определить скорость мотоцикла по угловой скорости вращения его колес. Итак, колеса мотоцикла вращаются с угловой скоростью ( omega ) , равной 21,5 ( pi ) радиан в секунду. Пусть радиус колеса ( r ) равен 40 см, тогда достаточно использовать следующую формулу:

Подставляя в нее значения, получим:

Итак, скорость мотоцикла равна 27 м/с или 97 км/ч.
Вычисляем тангенциальное ускорение
Тангенциальным ускорением называется скорость изменения величины линейной скорости вращательного движения. Эта характеристика вращательного движения очень похожа на линейное ускорение прямолинейного движения (см. главу 3). Например, точки на колесе мотоцикла в момент старта имеют нулевую линейную скорость, а спустя некоторое время после разгона ускоряются до некоторой ненулевой линейной скорости. Как определить это тангенциальное ускорение точки колеса? Переформулируем вопрос: как связать линейное ускорение

где ( a ) — это ускорение, ( Delta v ) — изменение скорости, a ( Delta t ) — время изменения скорости, с угловым ускорением

где ( Deltaomega ) — изменение угловой скорости, ( Delta t ) — время изменения угловой скорости?
Как мы уже знаем, линейная и угловая скорости связаны равенством

Подставим это выражение в предыдущую формулу линейного ускорения:

Поскольку радиус остается постоянным, то его можно вынести за скобки:

Поскольку угловое ускорение ( alpha=Deltaomega/Delta t ) , то:

Итак, получаем следующую формулу связи между линейным и угловым ускорением:

Иначе говоря, тангенциальное ускорение равно произведению радиуса на угловое ускорение.
Вычисляем центростремительное ускорение
Центростремительнным ускорением называется ускорение, необходимое для удержания объекта на круговой орбите вращательного движения. Как связаны угловая скорость и центростремительное ускорение? Формула для центростремительного ускорения уже приводилась ранее (см. главу 7):

Теперь, используя известную формулу связи линейной и угловой скорости ( v=romega ) , получим:

По этой формуле можно определить величину центростремительного ускорения по известной угловой скорости и радиусу. Например, для вычисления центростремительного ускорения Луны, вращающейся вокруг Земли, удобно использовать именно эту формулу.
Луна делает полный оборот вокруг Земли за 28 дней, т.е. за 28 дней Луна проходит ( 2pi ) радиан. Отсюда получаем угловую скорость Луны:

Чтобы получить значение угловой скорости в привычных единицах, следует преобразовать дни в секунды:

После подстановки этого значения в предыдущую формулу получим:

Средний радиус орбиты Луны равен 3,85·10 8 м. Подставляя эти значения угловой скорости и радиуса в формулу центростремительного ускорения, получим:

Зная это ускорение и массу Луны, которая равна 7,35·10 22 кг, можно определить центростремительную силу, необходимую для удержания Луны на ее орбите:

Используем векторы для изучения вращательного движения
В предыдущих разделах этой главы угловая скорость и угловое ускорение рассматривались как скаляры, т.е. как параметры, характеризующиеся только величиной. Однако эти параметры вращательного движения, на самом деле, являются векторами, т.е. они обладают величиной и направлением (см. главу 4). В этом разделе рассматривается величина и направление некоторых параметров вращательного движения.
Определяем направление угловой скорости
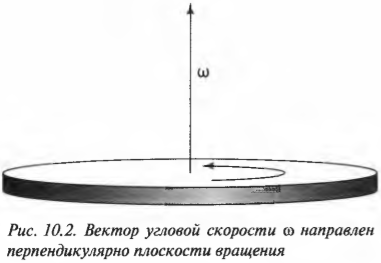
Как нам уже известно, вращающееся колесо мотоцикла имеет не только угловую скорость, но и угловое ускорение. Что можно сказать о направлении вектора угловой скорости? Оно не совпадает с направлением линейной тангенциальной скорости, а… перпендикулярно плоскости колеса!
Эта новость всегда приводит к некоторому замешательству среди новичков: угловая скорость ( omega ) , оказывается, направлена вдоль оси вращающегося колеса (рис. 10.2). Во вращающемся колесе единственной неподвижной точкой является его центр. Поэтому начало вектора угловой скорости принято располагать в центре окружности вращения.
Для определения направления вектора угловой скорости ( omega ) часто используют правило правой руки. Если охватить ладонью ось вращения, а пальцы свернуть так, чтобы они указывали на направление тангенциальной скорости, то вытянутый большой палец укажет направление вектора угловой скорости ( omega ) .
Теперь угловую скорость можно использовать так же, как и остальные векторные характеристики движения. Направление вектора угловой скорости можно найти по правилу правой руки, а величину — по приведенной ранее формуле. То, что вектор угловой скорости направлен перпендикулярно плоскости вращательного движения, часто вызывает некоторые трудности у начинающих, но к этому можно быстро привыкнуть.
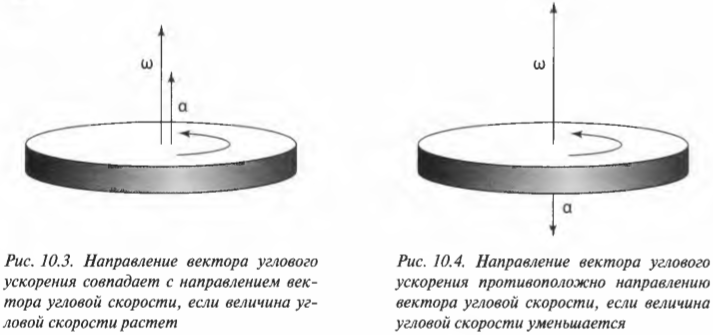
Определяем направление углового ускорения
Если вектор угловой скорости направлен перпендикулярно плоскости вращательного движения, то куда направлен вектор углового ускорения в случае замедления или ускорения вращения объекта? Как известно (см. предыдущие разделы), угловое ускорение определяется формулой:

где ( alpha ) — угловое ускорение, ( Deltaomega ) — изменение угловой скорости, ( Delta t ) — время изменения угловой скорости.
В векторной форме оно имеет следующий вид:

где ( mathbf <alpha>) — вектор углового ускорения, а ( Deltamathbf <omega>) — изменение вектора угловой скорости. Отсюда ясно, что направление вектора углового ускорения совпадает с направлением изменения вектора угловой скорости.
Если вектор угловой скорости меняется только по величине, то направление вектора углового ускорения параллельно направлению вектора угловой скорости. Если величина угловой скорости растет, то направление вектора углового ускорения совпадает с направлением вектора угловой скорости, как показано на рис. 10.3.
А если величина угловой скорости падает, то направление вектора углового ускорения противоположно направлению вектора угловой скорости, как показано на рис. 10.4.
Поднимаем грузы: момент силы
В физике большое значение имеет не только время, но и место приложения силы. Всем когда-либо приходилось пользоваться рычагом для перемещения тяжелых грузов. Чем длиннее рычаг, тем легче сдвинуть груз. На языке физики применение силы с помощью рычага характеризуется понятием момент силы.
Приложение момента силы неразрывно связано с вращательным движением объектов. Если приложить силу к краю карусели, то карусель начнет вращательное движение. Чем дальше точка приложения силы, тем легче раскрутить карусель до заданной угловой скорости (параметры вращательного движения описываются в главе 1 1 ).
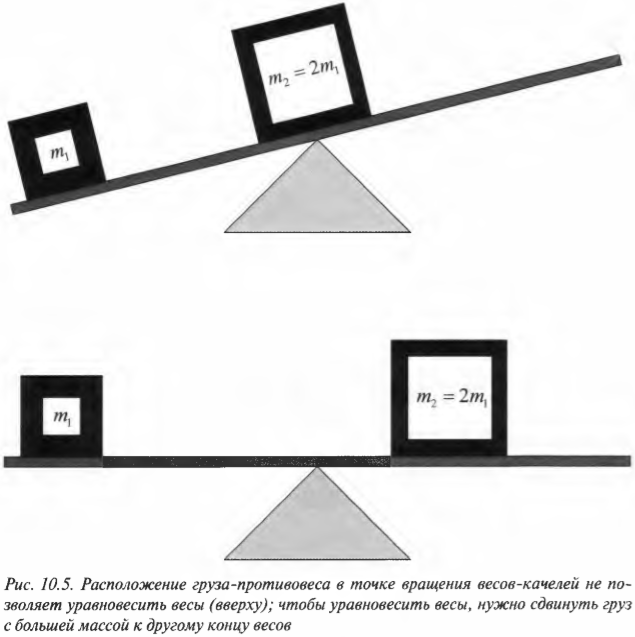
В верхней части рис. 10.5 показаны весы-качели с грузом массы ( m_1 ) на одном конце и грузом большей массы ( m_2=2m_1 ) посередине. Чтобы уравновесить весы-качели, нужно сместить груз с большей массой ( m_2 ) к другому концу весов, как показано в нижней части рис. 10.5. Как известно из опыта, размещение груза в точке вращения весов не приводит к уравновешиванию весов. Чтобы уравновесить весы, нужно сдвинуть груз с большей массой ( m_2=2m_1 ) к другому концу весов на расстояние вдвое меньшее, чем расстояние от точки вращения до второго груза с массой ( m_1 ) .
Знакомимся с формулой момента силы
Для уравновешивания весов важно не только, какая сила используется, но и где она прикладывается. Расстояние от точки приложения силы до точки вращения называется плечом силы.
Предположим, что нам нужно открыть дверь, схематически показанную на рис. 10.6. Как известно из опыта, дверь практически невозможно открыть, если прилагать силу вблизи петель (см. схему А на рис. 10.6). Однако, если приложить силу посередине двери, то открыть ее будет гораздо проще (см. схему Б на рис. 10.6). Наконец, прилагая силу у противоположного края двери по отношению к расположению петель, ее можно открыть с еще меньшим усилием (см. схему В на рис. 10.6).
На рис. 10.6 расстояние от мест расположения петель до точки приложения силы и есть плечо силы. Моментом силы называется произведение прилагаемой силы ( F ) на плечо силы ( l ) :

Момент силы в системе СИ измеряется в Н·м, а в системе СГС — в дин·см (подробнее эти системы единиц измерения описываются в главе 2).
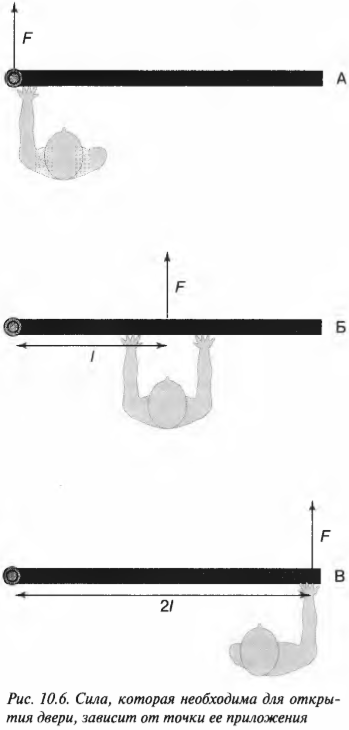
Вернемся к примеру на рис. 10.6, где требуется открыть дверь шириной 1 м с помощью силы величиной 200 Н. В случае А (см. рис. 10.6) плечо силы равно нулю и произведение этого плеча на силу любой величины (включая и силу 200 Н) даст нулевой момент силы. В случае Б (см. рис. 10.6) плечо силы равно половине ширины двери, т.е. плечо силы ( l ) равно 0,5 м и момент силы будет равен:

В случае В (см. рис. 10.6) плечо силы равно ширине двери, т.е. плечо силы ( l ) равно 1 м и момент силы будет равен:

Итак, увеличение вдвое длины плеча при той же силе дает нам такое же увеличение момента силы. До сих пор сила прилагалась перпендикулярно к линии, соединяющей точку приложения силы и точку вращения. А что будет с моментом силы, если дверь будет немного приоткрыта и направление силы уже будет не перпендикулярным?
Разбираемся с направлением приложенной силы и плечом силы
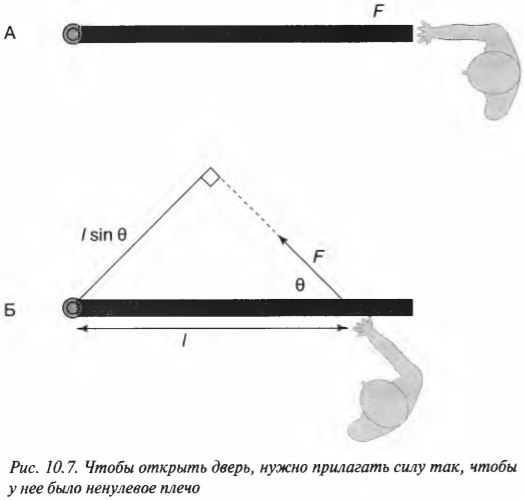
Допустим, что сила приложена не перпендикулярно к поверхности двери, а параллельно, как показано на схеме А на рис. 10.7. Как известно из опыта, таким образом дверь открыть невозможно. Дело в том, что у такой силы нет проекции, которая бы могла вызвать вращательное движение. Точнее говоря, у такой силы нет ненулевого плеча для создания вращательного момента силы.
Размышляем над тем, как создается момент силы
Момент силы из предыдущего примера требуется создавать всегда для открытия двери независимо от того, какую дверь приходится открывать: легкую калитку изгороди или массивную дверь банковского сейфа. Как вычислить необходимый момент силы? Сначала нужно определить плечо сил, а потом умножить его на величину силы.
Однако не всегда все так просто. Посмотрите на схему Б на рис. 10.7. Как видите, сила прилагается под некоторым углом ( theta ) . Как в таком случае определить плечо силы? Если бы угол ( theta ) был прямым, то мы могли бы воспользоваться уже известно нам формулой:

Однако в данном случае угол ( theta ) не является прямым.
В таком случае нужно просто помнить следующее правило: плечом силы называется длина перпендикуляра, опущенного из предполагаемой точки вращения на прямую, относительно которой действует сила.
Попробуем применить это правило определения плеча силы для схемы Б на рис. 10.7. Нужно продлить линию, вдоль которой действует сила, а потом опустить на нее перпендикуляр из точки вращения двери. Из полученного прямоугольного треугольника легко определить искомое плечо силы:

Если угол ( theta ) равен нулю, то никакого момента силы не возникает (см. схему А на рис. 10.7).
Итак, получаем для момента силы для схемы Б на рис. 10.7:

Например, если требуется открыть дверь шириной 1 м с помощью силы величиной 200 Н, приложенной под углом ( theta ) = 45°, то создаваемый момент этой силы будет равен:

Как видите, этот момент силы 140 Н·м меньше, чем момент силы 200 Н·м, созданный под прямым углом на схеме В на рис. 10.6.
Определяем направление момента силы
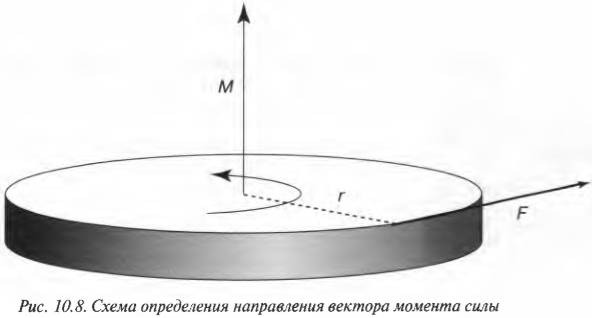
Учитывая все приведенные выше сведения о моменте силы, у читателя вполне может возникнуть подозрение, что момент силы обладает направлением. И это действительно так. Момент силы является векторной величиной, направление которой определяется по правилу правой руки. Если охватить ладонью ось вращения, а пальцы свернуть так, чтобы они указывали на направление силы, то вытянутый большой палец укажет направление вектора момента силы.
На рис. 10.8 показан пример силы ( mathbf ) с плечом ( mathbf ) и соответствующего вектора момента сил ( mathbf ) .
Уравновешиваем моменты сил
В жизни нам часто приходится сталкиваться с равновесными состояниями. Как равновесное механическое состояние определяется с точки зрения физики? Обычно физики подразумевают под равновесным состоянием объекта то, что он не испытывает никакого ускорения (но может двигаться с постоянной скоростью).
Для поступательного движения равновесное состояние означает, что сумма всех сил, действующих на объект равна нулю:

Иначе говоря, результирующая действующая сила равна нулю.
Вращательное движение также может быть равновесным, если такое движение происходит без углового ускорения, т.е. с постоянной угловой скоростью.
Для вращательного движения равновесное состояние означает, что сумма всех моментов сил, действующих на объект, равна нулю:

Как видите, это условие равновесного вращательного движения аналогично условию равновесного поступательного движения. Условия равновесного вращательного движения удобно использовать для определения момента силы, необходимого для уравновешивания неравномерно вращающегося объекта.
Простой пример: вешаем рекламный плакат
Предположим, что у входа в магазин нужно повесить большой и тяжелый рекламный плакат, как показано на рис. 10.9. Хозяин магазина пытался сделать это и раньше, но у него ничего не выходило, поскольку он использовал очень непрочный болт.
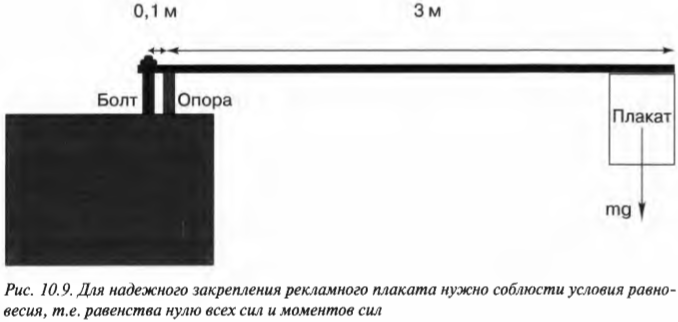
Попробуем определить силу, с которой болт должен удерживать всю конструкцию, показанную на рис. 10.9. Пусть плакат имеет массу 50 кг и висит на шесте 3 м от точки опоры шеста, а массу шеста в данном примере будем считать пренебрежимо малой. Болт находится в 10 см от точки опоры шеста.
Согласно условиям равновесия, сумма всех моментов сил должна быть равна нулю:


где ( mathbf ) — это момент силы со стороны плаката, а ( mathbf ) — это момент силы со стороны болта.
Чему равны упомянутые моменты? Момент силы со стороны плаката можно легко определить по формуле:

где ( m ) = 50 кг — это масса плаката, ( mathbf ) — ускорение свободного падения под действием силы гравитационного притяжения (силы тяжести), ( mmathbf ) — сила тяжести плаката, а ( l_п ) = 3 м — это плечо силы тяжести плаката.
Подставляя значения, получим:

Обратите внимание, что здесь перед ускорением свободного падения под действием силы гравитационного притяжения стоит знак “минус”. Это значит, что вектор ускорения свободного падения направлен вниз, т.е. в сторону, противоположную выбранному направлению оси координат.
Момент силы со стороны болта определяется формулой:

где ( mathbf ) — это искомая сила, с которой болт должен удерживать всю конструкцию, а ( l_б ) = 0,1 м — это ее плечо.
Подставляя полученные выражения для моментов сил в формулу:

Отсюда с помощью простых алгебраических преобразований получим искомую силу:

Как видите сила, с которой болт должен удерживать всю конструкцию, направлена противоположно вектору ускорения свободного падения, т.е. вверх.
Подставляя значения, получим искомый ответ:

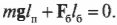
Более сложный пример: учитываем силу трения при расчете равновесия
Рассмотрим теперь другую более сложную задачу, в которой для расчета равновесия системы объектов нужно учесть силу трения. Предположим, что работник магазина решил использовать переносную лестницу для монтажа рекламного плаката, как схематически показано на рис. 10.10.
Пусть лестница длиной ( l_л ) = 4 м стоит под углом ( theta ) = 45° к поверхности тротуара, работник имеет массу ( m_р ) = 45 кг и находится на ней на расстоянии ( l_р ) = 3 м от нижнего конца лестницы, лестница имеет массу (m_л ) = 20 кг, а коэффициент трения покоя между поверхностью тротуара и концами лестницы равен ( mu_п ) = 0,7. Вопрос: будет ли такая система объектов находиться в состоянии равновесия? Попросту говоря, достаточной ли будет сила трения, чтобы лестница вместе с рабочим не соскользнула и упала?
Итак, для ответа на этот вопрос нам нужно учесть следующие силы, действующие на лестницу:
- ( mathbf ) — нормальная сила со стороны стены;
- ( mathbf ) — вес рабочего;
- ( mathbf ) — вес лестницы;
- ( mathbf> ) — сила трения между поверхностью тротуара и концами лестницы;
- ( mathbf ) — нормальная сила со стороны тротуара.
Согласно условиям равновесного поступательного движения, сумма всех сил, действующих на лестницу, должна быть равна нулю:

Это значит, что сумма всех сил вдоль горизонтальной оси, а именно нормальной силы со стороны стены ( mathbf ) и силы трения между поверхностью тротуара и концами лестницы ( mathbf> ) , должна быть равна нулю, то есть:

Перефразируя поставленный выше вопрос о достаточности силы трения, получим: выполняется ли условие

Кроме того, сумма всех сил вдоль вертикальной оси, а именно веса рабочего ( mathbf ) , веса лестницы ( mathbf ) и нормальной силы со стороны тротуара ( mathbf ) , должна быть равна нулю, то есть:


Согласно условиям равновесного вращательного движения, также необходимо равенство нулю всех моментов сил, действующих на лестницу:

Пусть предполагаемой точкой вращения является нижний конец лестницы, тогда должна быть равна нулю сумма моментов сил, создаваемых весом рабочего ( mathbf ) , весом лестницы ( mathbf ) и нормальной силой со стороны стены ( mathbf ) :



Поскольку ( L_р=l_р ) , ( L_л=l_л/2 ) (центр тяжести лестницы находится посередине лестницы), ( L_с=l_л ) , ( alpha=360^<circ>-theta ) , ( beta=360^<circ>-theta ) и ( gamma=theta ) , то получим:


Таким образом, мы получили систему из двух уравнений с двумя неизвестными сил ( mathbf ) и ( mathbf ) :
Зададимся вопросом: соблюдается ли условие

Из системы двух уравнений получим:
Итак, остается выяснить, соблюдается ли условие:
После подстановки значений получим:

Поскольку ( mu_т ) = 0,7, то упомянутое условие соблюдается, и лестница с рабочим не упадет.
Центростремительная сила
Формула центробежной силы: F = mv 2 /r
Калькулятор расчета центростремительной силы действующей на тело
Движение тела по окружности
Согласно закону инерции всякое тело стремится двигаться равномерно по прямой линии. Следовательно, чтобы выяснить условия, необходимые для движения тела по окружности, нам надо найти силу или силы, которые изменяют направление движения.
Сила F, тянущая тело к центру и сворачивающая тело с прямолинейного пути, называется центростремительной силой. Но центростремительная сила — это не единственная сила, действующая во время движения тела по окружности, потому что согласно третьему закону Ньютона силы всегда действуют парами. Если существует центростремительная сила, то должна быть и другая сила F, равная ей по величине, но противоположная по направлению. Эта сила называется центробежной силой. Следовательно, можно сделать вывод, что когда тело движется по окружности с постоянной скоростью, то центростремительная сила равняется центробежной и нет никаких сил или их составляющих, которые бы действовали по направлению движения.
[spoiler title=”источники:”]
[/spoiler]
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 30 ноября 2016 года; проверки требуют 5 правок.
- О разновидности перекрёстков: см. Круговой перекрёсток.
В физике кругово́е движе́ние — это вращательное движение материальной точки или тела, когда ось вращения в выбранной системе отсчёта неподвижна и не проходит через центр тела. В этом случае траектория точки или тела является окружностью, круговой орбитой. Оно может быть равномерным (с постоянной угловой скоростью) или неравномерным (с переменной угловой скоростью). Вращение трёхмерного тела вокруг неподвижной оси включает в себя круговое движение каждой его части. Мы можем говорить о круговом движении объекта только если можем пренебречь его размерами, так что мы имеем движение массивной точки на плоскости. Например, центр масс тела может совершать круговое движение.
Примеры кругового движения: искусственный спутник на геосинхронной орбите, камень на верёвке, вращающийся по кругу (см. метание молота), болид, совершающий поворот, электрон, движущийся перпендикулярно постоянному магнитному полю, зубчатое колесо, вращающееся внутри механизма.
Круговое движение является ускоренным, даже если происходит с постоянной угловой скоростью, потому что вектор скорости объекта постоянно меняет направление. Такое изменение направления скорости вызывает ускорение движущегося объекта центростремительной силой, которая толкает движущийся объект по направлению к центру круговой орбиты. Без этого ускорения объект будет двигаться прямолинейно в соответствии с законами Ньютона.
Формулы для равномерного кругового движения[править | править код]

Для движения по кругу радиуса R длина окружности будет C = 2π R. Если период вращения есть T, то угловая скорость вращения ω будет равна:

Скорость движения объекта равна

Угол поворота θ за время t равен:

Ускорение, вызванное изменением направления скорости, можно найти, если заметить, что скорость совершает полное изменение направления за то же самое время T, за которое объект делает один оборот. Тогда вектор скорости проходит путь длиной 2π v каждые T секунд, или:

и направлено радиально к центру.
Взаимосвязи векторов показаны на рис. 1. Ось вращения изображена вектором Ω, перпендикулярно плоскости орбиты и имеет величину ω = dθ / dt. Направление вектора Ω выбрано в соответствии с правилом правой руки. По этому соглашению скорость это векторное произведение вида:

и есть вектор, перпендикулярный как Ω так и r ( t ), направленный по касательной к орбите и имеющий величину ω R. Аналогично, ускорение определяется как:

Оно представляет собой вектор, перпендикулярный как Ω так и v ( t ), имеющий величину ω |v| = ω2 R и направление строго противоположно к r ( t ).
Постоянная скорость[править | править код]
В простейшем случае скорость, масса и радиус являются постоянными.
Рассмотрим тело массой один килограмм, движущееся по кругу радиуса один метр с угловой скоростью один радиан в секунду.
Теперь рассмотрим тело массы  , движущееся по кругу радиуса
, движущееся по кругу радиуса  с угловой скоростью
с угловой скоростью 

Переменная скорость[править | править код]
В круговом движении полную силу, приложенную к объекту, можно разложить на две составляющие: центростремительную, удерживающую тело на круговой орбите (т. е. меняющую направление вектора скорости), и тангенциальную, направленную по касательной к окружности и вызывающую изменение длины вектора скорости (т. е. меняющую скорость вращения тела по орбите). Величина центростремительной составляющей зависит от мгновенной скорости.
Для примера, когда камень привязан к концу верёвки, то он подвергается воздействию некоторой силы, которую мы можем разложить на радиальную и боковую составляющие. Радиальная направлена к центру (вовнутрь) окружности и вызвана тем, что веревка сопротивляется удлинению. А боковая составляющая определяет будет вращение камня ускоряться или замедляться.
Описание кругового движения в полярных координатах[править | править код]
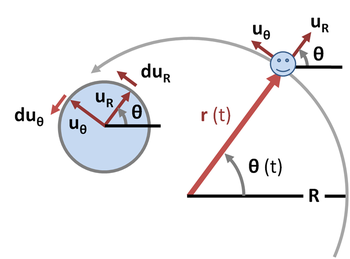
Траектория кругового движения тела может быть описана в полярной системе координат значениями фиксированного расстояние R от центра орбиты, являющейся точкой отсчёта, и угла ориентации θ (t) от некоторого фиксированного направления (рис. 2). Вектор перемещения  является радиальным вектором от полюса до текущего положения:
является радиальным вектором от полюса до текущего положения:

где  — единичный вектор, параллельный радиусу в момент t и направленный от полюса. Удобно также ввести единичный вектор, ортогональный к
— единичный вектор, параллельный радиусу в момент t и направленный от полюса. Удобно также ввести единичный вектор, ортогональный к  , который назовём
, который назовём  . Обычно его ориентация выбирается по направлению движения вдоль орбиты.
. Обычно его ориентация выбирается по направлению движения вдоль орбиты.
Скорость является производной перемещения по времени:

Поскольку радиус окружности является константой, радиальная составляющая скорости равна нулю. Единичный вектор имеет инвариантное по времени значение, так что при изменении времени его конец всегда лежит на окружности единичного радиуса, а угол θ такой же, как у  . Если произошло малое приращение угла dθ за время dt, тогда описывает дугу единичной окружности со значением dθ (см. единичную окружность слева на рис. 2). Следовательно:
. Если произошло малое приращение угла dθ за время dt, тогда описывает дугу единичной окружности со значением dθ (см. единичную окружность слева на рис. 2). Следовательно:

где направление изменения должно быть перпендикулярно к (или, другими словами, вдоль ), поскольку любое изменение d в направлении будет изменять величину . Знак положительный, потому что увеличение dθ влияет на объект и передвигается в направлении .
Следовательно, скорость становится:

Ускорение тела также можно разложить на радиальную и тангенциальную составляющие. Ускорение есть производная скорости по времени:


Производная по времени от находится таким же путём, как и для . Опять же, есть единичный вектор, и его конец расположен на единичной окружности, а угол равен π/2 + θ. Следовательно, приращение угла dθ вектора перемещает по дуге на величину dθ, и поскольку перпендикулярен к , мы имеем:

где отрицательный знак необходим, чтобы сохранить перпендикулярным к . (Иначе угол между и будет уменьшаться с увеличением dθ, см. единичную окружность слева на рис. 2). Следовательно, ускорение равно:


Центростремительное ускорение — это радиальная составляющая, направленная по радиусу вовнутрь:

тогда как тангенциальная составляющая изменяет значение скорости:

Описание кругового движения в комплексных числах[править | править код]
Круговое движение можно описать с использованием комплексных чисел. Пусть  — ось вещественных чисел, а
— ось вещественных чисел, а  — ось мнимых чисел. Тогда положение тела может быть задано в виде комплексного “вектора”
— ось мнимых чисел. Тогда положение тела может быть задано в виде комплексного “вектора”  :
:

где  есть мнимая единица, и
есть мнимая единица, и

есть угол комплексного вектора по отношению к вещественной оси как функция времени t.
Поскольку радиус есть константа:

где точка означает дифференциал по времени.
В этих обозначениях скорость имеет вид :

а ускорение:



Первое слагаемое направлено против вектора перемещения, а второе — перпендикулярно ему, как и в предыдущих результатах.
Ссылки[править | править код]
- BIGS animation (англ.) Круговое движение
- Circular Motion (англ.) – глава из онлайн-учебника
См. также[править | править код]
- Момент импульса
- Уравнения движения
- Математический маятник
- Центростремительная сила
- Сила инерции
Тело изменяет направление движения, когда движется по окружности. Это говорит о том, что подобное движение происходит под действием некоторой силы. Такую силу называют центростремительной. С ней связано центростремительное ускорение.
Линейная скорость меняется от точки к точке
При движении по окружности вектор линейной скорости (vec{v}) изменяет свое направление (рис. 1). Значит, направления векторов (vec{v}) для соседних точек будут различаться! Но в каждой точке окружности вектор (vec{v}) направлен перпендикулярно радиусу.

Рис. 1. Точка движется по окружности, линейная скорость изменяется по направлению, но в каждой точке остается перпендикулярной радиусу
Тело, двигаясь по кругу, изменяет направление, в котором движется. А если меняется направление движения, изменяется вектор скорости тела.
Примечания:
- Характеристики вектора – это его длина и его направление. Если изменится хотя бы одна из них, говорят, что изменился вектор.
- Через красную точку на рисунке 1 проходит ось вращения. По правилу правого винта вдоль оси вращения направлена угловая скорость.
Центростремительная сила – причина движения по окружности
Первый закон Ньютона гласит: пока на тело не действуют другие тела, оно сохраняет свою скорость неизменной. То есть, тело покоится, или движется с постоянной скоростью по прямой.
Тело изменит скорость своего движения по направлению или по модулю, только если на него подействует сила (другое тело).
При движении тела по окружности вектор скорости изменяется по направлению. Значит, на движущееся по окружности тело действует сила.
Эта сила притягивает тело к центру окружности (рис. 2), заставляя тело поворачивать. Поэтому, силу называют центростремительной (стремится к центру). Она направлена к центру окружности по радиусу.

Рис. 2. Чтобы точка двигалась по окружности, на нее должна действовать центростремительная сила. Эта сила направлена по радиусу к центру окружности
А если эту силу убрать, тело начнет двигаться по прямой с постоянной (одной и той же) скоростью.
Примечание: На любое тело, движущееся по окружности, действует центростремительная сила. Она в каждой точке этой окружности направлена к ее центру по радиусу.
Центростремительное ускорение
Второй закон Ньютона утверждает: если есть сила, появится ускорение.
Сила и ускорение связаны так:
[ large vec{F_{text{ц}}} = m cdot vec{a_{text{ц}}} ]
Это ускорение (vec{a_{text{ц}}}) сонаправлено (рис. 3) с вектором силы (vec{ F_{text{ц}} }), поэтому, его называют центростремительным ускорением.

Рис. 3. Центростремительная сила и центростремительное ускорение сонаправлены, они направлены по радиусу к центру окружности
Длина центростремительного ускорения отличается от длины вектора силы в (m) раз. Где (m) – это масса точки.
Вектор ускорения (vec{a_{text{ц}}}) направлен по радиусу к центру окружности. Значит, он перпендикулярен вектору (vec{v}) линейной скорости.
Поэтому центростремительное ускорение иногда называют нормальным ускорением.
[ vec{a_{text{ц}}} = vec{a_{n}} ]
Примечание: Нормаль – это перпендикуляр. Нормальное, значит, перпендикулярное.
Нормальное ускорение можно вычислить, пользуясь выражением:
[ large boxed{ left|vec{a_{n}} right| = frac{v^{2}}{R} }]
( vec{a_{n}} left( frac{text{м}}{c^{2}} right) ) — центростремительное ускорение;
(v left( frac{text{м}}{c} right)) — линейная скорость точки;
(R left( text{м}right)) – радиус окружности, по которой движется точка.
[ large boxed{vec{F_{text{ц}}} = m cdot vec{a_{text{ц}}} = m cdot frac{v^{2}}{R} }]
(m left( text{кг}right)) – масса точки.
Чем быстрее движется тело, и чем меньше радиус окружности, тем больше нормальное ускорение и центростремительная сила, действующая на тело.
Примечание: Нормальное ускорение есть всегда, когда есть движение по окружности, при этом не важно, меняется ли скорость тела по модулю, или не меняется.
