Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Содержание:
- Сила упругости и закон Гука
- Определение коэффициента жесткости
- Расчет жесткости системы
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Вычисление коэффициента жесткости опытным методом
- Примеры задач на нахождение жесткости
- Видео
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = – k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).

Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.

Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем – в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.
Примеры задач с решением
Задание. Пружина в отсутствии нагрузки имеет длину $l=0,01$ м и жесткость равную 10 $frac. $Чему будет равна жесткость пружины и ее длина, если на пружину действовать силой $F$= 2 Н? Считайте деформацию пружины малой и упругой.

Решение. Жесткость пружины при упругих деформациях является постоянной величиной, значит, в нашей задаче:
При упругих деформациях выполняется закон Гука:
[F=kDelta l left(1.2right).]
Из (1.2) найдем удлинение пружины:
Длина растянутой пружины равна:
Вычислим новую длину пружины:
Ответ. 1) $k’=10 frac$; 2) $l’=0,21$ м
Задание. Две пружины, имеющие жесткости $k_1$ и $k_2$ соединили последовательно. Какой будет удлинение первой пружины (рис.3), если длина второй пружины увеличилась на величину $Delta l_2$?
Решение. Если пружины соединены последовательно, то деформирующая сила ($overline$), действующая на каждую из пружин одинакова, то есть можно записать для первой пружины:
Для второй пружины запишем:
Если равны левые части выражений (2.1) и (2.2), то можно приравнять и правые части:
[k_1Delta l_1=k_2Delta l_2left(2.3right).]
Из равенства (2.3) получим удлинение первой пружины:
Ответ. $Delta l_1=frac$
Как появился первый вариант формулы
Формула для расчета жесткости пружины, которая получила название закона Гука, была установлена экспериментально. В процессе опытов с подвешенными на упругом элементе грузами разной массы замерялась величина его растяжения. Так и выяснилось, что одна и та же испытуемая деталь под разными нагрузками претерпевает различные деформации. Причем подвешивание определенного количества гирек, одинаковых по массе, показало, что каждая добавленная/снятая гирька увеличивает/уменьшает длину упругого элемента на одинаковую величину.
В итоге этих экспериментов появилась такая формула: kx=mg, где k – некий постоянный для данной пружины коэффициент, x – изменение длины пружины, m – ее масса, а g – ускорение свободного падения (примерное значение – 9,8 м/с²).
Так было открыто свойство жесткости, которое, как и формула для определения коэффициента упругости, находит самое широкое применение в любой отрасли промышленности.
Сила упругости.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: силы в механике, сила упругости, закон Гука.
Как мы знаем, в правой части второго закона Ньютона стоит равнодействующая (то есть векторная сумма) всех сил, приложенных к телу. Теперь нам предстоит изучить силы взаимодействия тел в механике. Их три вида: сила упругости, гравитационная сила и сила трения. Начинаем с силы упругости.
Особенности расчета жесткости соединений пружин
Важный моментом является расчет нескольких упругих элементов, соединенных последовательно или параллельно.
При параллельном расположении нескольких деталей общая жесткость этой системы определяется простой суммой коэффициентов отдельных комплектующих. Как нетрудно заметить, жесткость системы больше, чем отдельной детали.
При последовательном расположении формула более сложная: величина, обратная суммарной жесткости, равна сумме величин, обратных к жесткости каждой комплектующей. В этом варианте сумма меньше слагаемых.
Используя эти зависимости, легко определиться с правильным выбором упругих комплектующих для конкретного случая.
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Как найти удлинение пружины?
Эта формула, а точнее закон Гука, выглядит так: F=|kx|, где k – это коэффициент упругости пружины, x – это удлинение пружины или же, как её ещё называют, величина деформации пружины.
Интересные материалы:
Что происходит с внутренней энергией воды при нагревании? Что происходит с водой при нагревании и при охлаждении? Что происходит с водой в ночь на 19 января? Что стало причиной уменьшения стока воды в Аральское море? Что такое мутить воду? Что такое нерастворимые в воде вещества? Что такое пудровая туалетная вода? Что такое тестер туалетная вода? Что такое вода для 2 класса? Что такое вода для инъекций?
Деформация.
Силы упругости возникают при деформациях тел. Деформация — это изменение формы и размеров тела. К деформациям относятся растяжение, сжатие, кручение, сдвиг и изгиб. Деформации бывают упругими и пластическими. Упругая деформация полностью исчезает после прекращения действия вызывающих её внешних сил, так что тело полностью восстанавливает форму и размеры. Пластическая деформация сохраняется (быть может, частично) после снятия внешней нагрузки, и тело уже не возвращается к прежним размерам и форме.
Частицы тела (молекулы или атомы) взаимодействуют друг с другом силами притяжения и отталкивания, имеющими электромагнитное происхождение (это силы, действующие между ядрами и электронами соседних атомов). Силы взаимодействия зависят о расстояний между частицами. Если деформации нет, то силы притяжения компенсируются силами отталкивания. При деформации изменяются расстояния между частицами, и баланс сил взаимодействия нарушается.
Например, при растяжении стержня расстояния между его частицами увеличиваются, и начинают преобладать силы притяжения. Наоборот, при сжатии стержня расстояния между частицами уменьшаются, и начинают преобладать силы отталкивания. В любом случае возникает сила, которая направлена в сторону, противоположную деформации, и стремится восстановить первоначальную конфигурацию тела.
Сила упругости — это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости:
1. действует между соседними слоями деформированного тела и приложена к каждому слою; 2. действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример — сила реакции опоры).
Силы, возникающие при пластических деформациях, не относятся к силам упругости. Эти силы зависят не от величины деформации, а от скорости её возникновения. Изучение таких сил выходит далеко за рамки школьной программы.
В школьной физике рассматриваются растяжения нитей и тросов, а также растяжения и сжатия пружин и стержней. Во всех этих случаях силы упругости направлены вдоль осей данных тел.
Закон Гука.
Деформация называется малой, если изменение размеров тела много меньше его первоначальных размеров. При малых деформациях зависимость силы упругости от величины деформации оказывается линейной.
Закон Гука. Абсолютная величина силы упругости прямо пропорциональна величине деформации. В частности, для пружины, сжатой или растянутой на величину , сила упругости даётся формулой:
где — коэффициент жёсткости пружины.
Коэффициент жёсткости зависит не только от материала пружины, но также от её формы и размеров.
Из формулы (1) следует, что график зависимости силы упругости от (малой) деформации является прямой линией (рис. 1 ):
Коэффициент жёсткости — о угловой коэффициент в уравнении прямой . Поэтому справедливо равенство:
где — угол наклона данной прямой к оси абсцисс. Это равенство удобно использовать при экспериментальном нахождении величины .
Подчеркнём ещё раз, что закон Гука о линейной зависимости силы упругости от величины деформации справедлив лишь при малых деформациях тела. Когда деформации перестают быть малыми, эта зависимость перестаёт быть линейной и приобретает более сложный вид. Соответственно, прямая линия на рис. 1 — это лишь небольшой начальный участок криволинейного графика, описывающего зависимость от при всех значениях деформации .
Понятие жесткости
Жесткость как физическая величина характеризует силу, которую нужно приложить к пружине для достижения определенной степени растяжения или сжатия.
Коэффициент жесткости рассчитывается по формуле Гука:
где $F$ — сила, развиваемая пружиной, $k$ — коэффициент жесткости, зависящий от ее характеристик (см. выше) и измеряемый в ньютонах на метр, $x$ — абсолютное приращение расстояния, на которое изменилась длина пружины после приложения внешней силы. Знак минус в правой части формулы свидетельствует о том, что сила, порождаемая пружиной, действует в противоположном по отношению к нагрузке направлении.
Коэффициент жесткости можно вычислить экспериментально, подвешивая на расположенную вертикально и закрепленную за верхний конец пружину грузы с известной массой. В этом случае имеет место зависимость
$m cdot g — k cdot x = 0$,
где $m$ — масса, $g$ — ускорение свободного падения. Отсюда
Содержание:
Сила упругости:
Мы уже знаем, что на все тела, которые находятся на Земле или вблизи неё, действует сила тяжести. Эта сила является причиной того, что тела, лишённые опор или подвесов, например капли дождя, брошенный вверх камень, листва, оторвавшаяся от ветви дерева, падают на Землю.
Опыт 1. Положим на две опоры стальную пластину. Она будет находиться в горизонтальном положении (рис. 72, а). Когда на середину ее поставим гирю, то под действием силы тяжести гиря вместе со стальной пластиной будет двигаться вниз до тех пор, пока не остановится (рис. 72, б).
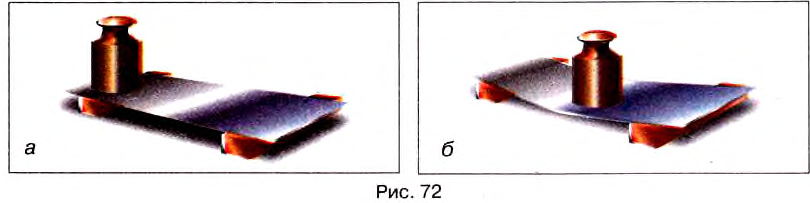
Прекращение движения можно объяснить тем, что кроме силы тяжести, действующей на гирю и направленной вертикально вниз, на неё начала действовать сила, направленная вверх, которая уравновесила силу тяжести. Откуда возникла эта вторая сила ?
Изменение формы или размеров тела называют деформацией. Вследствие движения тела вниз стальная пластина прогибается — деформируется. В результате деформации в пластине возникает сила, с которой она действует на гирю, стоящую на ней. Эту силу назвали силой упругости, она направлена вверх, т. е. в сторону, противоположную силе тяжести. Когда сила упругости по значению сравняется с силой тяжести, опора и тело остановятся.
Сила упругости – это сила, возникающая вследствие деформации тела, и направленная противоположно направлению перемещения частиц тела при деформации.
Одним из видов деформации является прогиб. Чем больше прогибается опора, тем большей становится сила упругости, действующая со стороны опоры на тело. До того как тело поставили на пластину, деформация в ней отсутствовала, как и сила упругости. По мере перемещения гири прогиб пластины возрастал и увеличивалась сила упругости. Свойства упругих тел (пружин) всесторонне изучил более 300 лет назад английский естествоиспытатель Роберт Гук. Проделанные им опыты позволили установить закон, названный его именем — закон Гука, а именно:
Сила упругости прямо пропорциональна деформации (удлинению) тела (пружины) и направлена противоположно направлению перемещения частиц тела при деформации.
Если удлинение тела, т. е. изменение его длины, обозначить через х (рис. 73, б), а силу упругости — через 
где  — коэффициент пропорциональности, который называют жёсткостью тела. У каждого тела свое значение жесткости.
— коэффициент пропорциональности, который называют жёсткостью тела. У каждого тела свое значение жесткости.
Чем больше жёсткость тела (пружины, провода, стержня и т. п.), тем меньше оно изменяет собственную длину под действием данной силы. Единицей жёсткости в СИ является один ньютон на метр  . Закон Гука даёт возможность сравнивать между собой тела с разной массой, т. е. взвешивать их. Чем больше масса тела, которое подвешиваем к пружине, тем больше она растягивается. На этом принципе устроен прибор для измерения силы — динамометр.
. Закон Гука даёт возможность сравнивать между собой тела с разной массой, т. е. взвешивать их. Чем больше масса тела, которое подвешиваем к пружине, тем больше она растягивается. На этом принципе устроен прибор для измерения силы — динамометр.
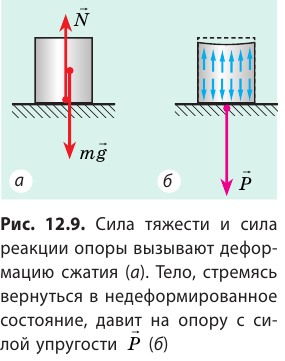
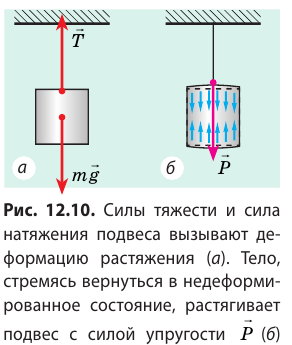
Опыт 2. Установим тело на опору (рис. 73, а). Вследствие взаимодействия деформируется не только опора, но и само тело, которое притягивается Землёй. Деформированное тело давит на опору с силой, которую называют весом тела Р. Если тело подвесить к пружине, то оно деформируется и при этом растягивает пружину, в результате чего возникает сила упругости (рис. 73, б). 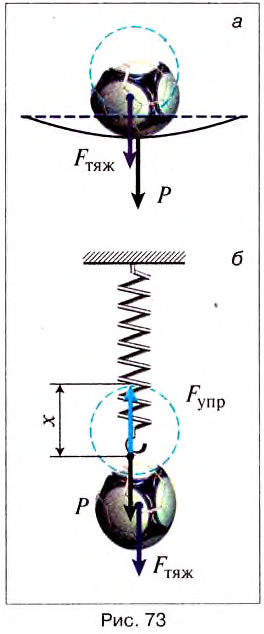
Тело действует на подвес с силой, которую называют весом тела Р.
Вес тела – это сила, с которой тело вследствие притяжения к Земле действует на горизонтальную опору или подвес.
Не следует путать силу тяжести с весом тела. Сила тяжести действует на само тело со стороны Земли, а вес этого тела — это сила упругости, которая действует на опору или подвес.
Если горизонтальная опора или подвес с телом находится в состоянии покоя или движется прямолинейно и равномерно, то вес тела равен силе тяжести и определяется по формуле:
где Р— вес тела;  = 9,81
= 9,81  ;
;  — масса тела.
— масса тела.
Иногда путают вес тела с его массой — это ошибка. Во-первых, это разные физические величины, из которых вес — направленная величина, вектор, а масса определяется только числовым значением. Они характеризуют разные свойства тел и имеют разные единицы: для веса — ньютон, для массы – килограмм. Во-вторых, каждое тело всегда имеет определённую неизменную массу, а вес тела может изменяться, если опора или подвес движется неравномерно. В этом случае вес тела может увеличиваться или уменьшаться по сравнению с весом тела на неподвижной опоре и даже исчезать, т. е. равняться нулю (состояние невесомости). Например, поднимая грузы с помощью подъёмного крана, нужно учитывать, что во время резких рывков вес груза возрастает, и трос может разорваться. Стоя на платформе медицинских весов, мы замечаем, что их показания изменяются, если мы приседаем или двигаем руками.
Вес тела действует на любую опору: пол, по которому мы ходим, стул, на котором сидим, канат, за который ухватились. Назначение опоры – ограничивать движение тела под действием силы тяжести, отсюда и её название.
Начиная с 4 октября 1957 г., когда космическая ракета вывела на орбиту первый искусственный спутник Земли, началась эра освоения человеком космического пространства. Человек побывал на Луне, готовится экспедиция на Марс. Мы часто слышим по радио и телевидению, читаем в газетах и журналах, что космонавты во время полёта в космическом корабле по орбите вокруг Земли находятся в особом состоянии, называемом невесомостью.
Что это за состояние и можно ли его наблюдать на Зеше?
Опыт 3. Верхний конец пружины с помощью нити прикрепим к неподвижной опоре, а к нижнему подвесим грузик (рис. 74, а). Под действием силы тяжести он начинает двигаться вниз. Пружина будет растягиваться до тех пор, пока возникшая в ней сила упругости не уравновесит силу тяжести. Перережем или пережжём нить, которая удерживает тело с пружиной. Пружина и тело начинают свободно падать, при этом растяжение у пружины исчезает, а это и означает, что тело потеряло вес и не действует на подвес (рис. 74, б).
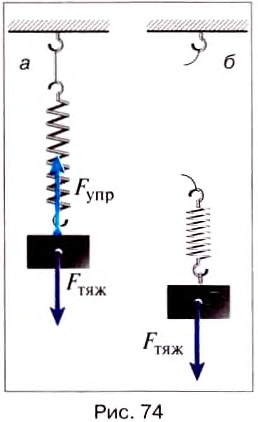
Сила тяжести при этом никуда не исчезает и заставляет тело падать на Землю.
Так же если скорости падения тела и опоры (подвеса) одинаковы, то тело не действует на них, и его вес равен нулю. Если искусственный спутник или космическая станция обращается вокруг Земли, то космонавты и все предметы внутри них двигаются с одинаковой скоростью относительно Земли. Вследствие этого тела, размещённые на подставках, не действуют на них, подвешенные к пружинам тела не растягивают их, разлитая из сосуда вода плавает в виде большой капли, маятниковые часы перестают работать, космонавты без особых усилий передвигаются, «летая» или «плавая» в корабле.
Если бы сила тяжести внезапно исчезла, то космический корабль вследствие инерции удалялся бы от Земли в космическое пространство по прямой линии. В состоянии невесомости находится любое тело во время свободного, т. е. безопорного падения. Если при обычных условиях не учитывать сопротивление воздуха, то в невесомости находится спортсмен, прыгающий с вышки в бассейн или выполняющий упражнения на батуте; любой из нас кратковременно находится в состоянии невесомости во время бега, когда обе ноги отрываются от Земли.
Кстати:
В давние времена благодаря упругим свойствам некоторых материалов (в частности, такого дерева, как тисс) наши пращуры изобрели лук – ручное оружие, предназначенное для метания стрел с помощью силы упругости натянутой тетивы.
Изобретённый приблизительно 12 тыс. лет тому назад, лук на протяжении многих столетий был основным оружием почти всех племён и народов мира. До изобретения огнестрельного оружия лук был наиболее эффективным боевым средством. Английские лучники могли выпускать до 14 стрел в минуту, что при массовом использовании луков в бою образовывало целую тучу стрел. Например, количество стрел, выпущенных в битве при Азенкуре (во время Столетней войны), составляло приблизительно 6 миллионов!
Широкое применение этого грозного оружия в средние века вызвало обоснований протест со стороны определённых слоёв общества. В 1139 г. Латеранский (церковный) собор, собравшийся в Риме, запретил применение этого оружия против христиан. Однако борьба за «лучное разоружение» не имела успеха, и лук как боевое оружие люди продолжали использовать ещё на протяжении 500 лет.
Пример №1
Назовите силы, которые действуют на груз, подвешенный к концу спиральной пружины.
Ответ: на груз действуют сила тяжести, направленная вертикально вниз, и сила упругости, направленная противоположно удлинению пружины.
Пример №2
Каков вес космического аппарата массой 383 кг на поверхности планеты Марс? На Марсе = 3,9
= 3,9  .
.
Дано:
 = 383 кг
= 383 кг
= 3,9
Р – ?
Решение:
Чтобы определить вес космического аппарата, используем формулу:
 .
.
 .
.
Ответ: Р= 1493,7 Н.
Пример №3
Космонавту в условиях невесомости необходимо заниматься физическими упражнениями. Понадобятся ли ему гантели?
Ответ: обычные упражнения на подъём веса в состоянии невесомости теряют смысл, но упражнения на преодоление инертности гантелей (махи, повороты, разведения рук и т. п.) выполнять вполне возможно. Тем не менее гантели как лишний груз скорее заменят на эспандер.
Измерение силы
Устройство динамометра (от греческих слов динамис — сила; метрео — измеряю) основано на том, что сила упругости пружины по закону Гука прямо пропорциональная удлинению (деформации) пружины.
Простейший пружинный динамометр изготовляют так. На дощечке закрепляют пружину, которая заканчивается внизу стержнем с крючком (рис. 79, а). К верхней части стержня прикрепляют указатель. На дощечке отмечают положение указателя — это нулевой штрих. Потом к крючку подвешивают разновесы массой 102 г. На этот грузик действует сила тяжести 1 Н. Под действием силы 1 Н пружина растянется, указатель опустится вниз. Отмечают его новое положение и напротив метки ставят цифру 1 (рис. 79, б). Потом подвешивают разновесы массой 204 г и ставят метку 2, которая означает, что в этом положении сила упругости пружины равна 2 Н (рис. 79, в). С помощью разновесов массой 306 г наносят метку 3
(рис. 79, г) и т. д.
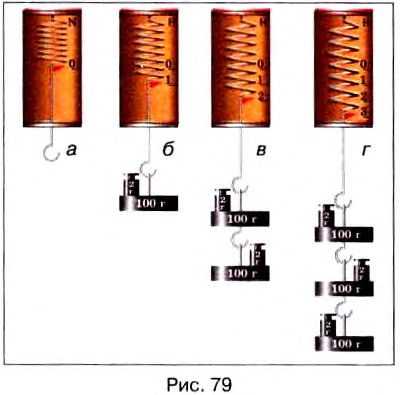
Можно нанести деления, соответствующие десятым долям ньютона: 0,2; 0,4; 0,6 и т. д. Для этого промежутки между соседними штрихами нужно поделить на пять одинаковых частей.
Проградуировать прибор – это значит нанести на него шкалу с делениями.
Проградуированная таким образом пружина и будет простейшим динамометром. Для измерения силы используют такие динамометры (рис. 80): а — школьный лабораторный динамометр; б — школьный демонстрационный динамометр: в – пружинные весы: г — медицинский динамометр-силомер, предназначенный для измерения силы мышц руки человека; д — динамометр-тягомер. Основной частью такого динамометра являются упругие стальные рессоры. Этот прибор используют для измерения силы тяги автомобилей, тракторов и т. п.
Деформация тел
Одним из признаков твердых тел является их свойство сохранять свою форму длительное время. Однако такое свойство наблюдается только тогда, когда на тело не действуют другие тела. Взаимодействуя с другими телами, оно изменяет свою форму. Это изменение не всегда заметно, однако оно всегда существует.
Что такое деформация
Изменение форм или размеров тела называют деформацией.
Явление деформации подчиняется действию определенных законов. Один из таких законов можно проиллюстрировать опытом. Повесим на штативе резиновую нить и измерим ее длину. Подвесим к нити груз определенной массы и увидим, что он начнет опускаться вниз, растягивая нить. Скорость его будет уменьшаться, и он в конце концов остановится, а длина нити будет больше начальной. По результатам опыта можно сделать вывод, что при деформации нити возникла сила, направленная в сторону, противоположную деформации.
Эту силу назвали силой упругости.
Силу, возникающую при деформации называют силой упругости.
Как рассчитать силу упругости
Силу упругости можно рассчитать, если известна деформация тела. Если начальную длину нити обозначить буквой  а длину после растяжения –
а длину после растяжения –  то изменение длины нити будет равно
то изменение длины нити будет равно

В предыдущем опыте добавим еще одну гирьку. Нить растянется больше. Если измерим изменение длины нити для этого случая, то увидим, что она стала в два раза большей, чем до этого. Такая закономерность характерна для всех случаев незначительной деформации тел и отображает действие закона Гука.
В чем суть закона Гука
Математически эта зависимость записывается так:

Здесь  – сила упругости;
– сила упругости;  – деформация тела;
– деформация тела;  – коэффициент упругости.
– коэффициент упругости.
Сила упругости пропорциональна деформации тела и направлена всегда в противоположном деформации направлении.
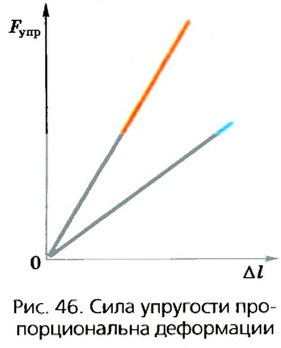
Закон Гука можно проиллюстрировать с помощью графика (рис. 46). На нем зависимость силы упругости от деформации изображена прямой линией, поскольку сила пропорциональна деформации. На рисунке показана зависимость силы упругости от деформации для двух различных тел. Графики являются прямыми линиями, но имеют различный наклон, что свидетельствует о различном значении коэффициента упругости для различных тел.
Закон Гука выполняется для таких деформаций, после снятия которых тело приобретает предыдущие размеры и форму. Такие деформации называют упругими.
- Заказать решение задач по физике
В чем природа сил упругости
Возникновение силы упругости связано с силами взаимодействия между молекулами. При деформации изменяется расстояние между молекулами, а поэтому преобладают или силы притяжения (при растяжении тела), или силы отталкивания (при сжатии тела).
Силы упругости учитывают и используют в различных приспособлениях и машинах. Автомобили, железнодорожные вагоны и другие транспортные средства имеют рессоры. Их использование делает движение более мягким, так как наезд колеса на камень или другое препятствие вызывает только деформацию рессоры и ощутимо не изменяет положения самого транспортного средства.
В странах, где часто бывают землетрясения, дома ставят на специальные пружины, которые во время толчка деформируются, а здание остается практически неподвижным.
Что такое сила упругости
Как известно, взаимодействие тел является не только причиной изменения их скоростей, но и деформации. Сила, вызывающая это явление, называется силой упругости.
Английский естествоиспытатель, ученый и экспериментатор Роберт Гук установил закон, названный его именем. Исследуя упругие деформации различных тел, Гук установил, что при деформации упругих тел их растяжение или сжатие прямо пропорционально силе, которая их растягивает или сжимает (рис. 2.16):
где k – коэффициент пропорциональности, который называется жесткостью, характеризующий способность тела противостоять деформации; х – абсолютная деформация (линейное растяжение или сжатие тела).
Знак «-» показывает, что направление силы упругости противоположно направлению изменения края деформированного тела.
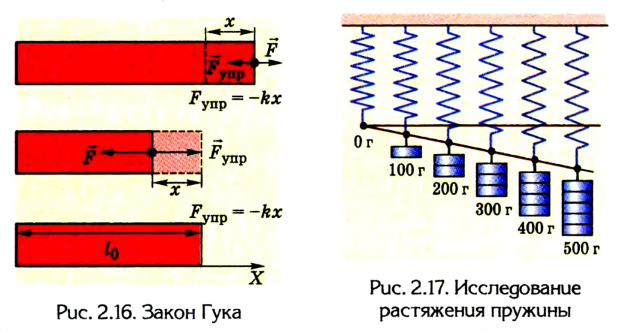
На рисунке 2.17 отображены результаты опыта по определению зависимости растяжения пружины от действующих на 69 нее сил, если к ней подвешен груз массой 100 г, 200 г … в гравитационном поле Земли.
Во время решения задач по расчету силы упругости необходимо четко представлять ее направление и к какому именно телу она приложена. Следует помнить, что деформация тела под действием любой внешней силы вызывает силу упругости, которую определяют по закону Гука.
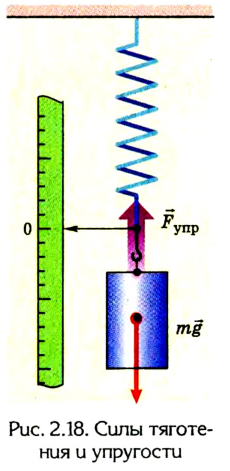
Если в поле силы тяготения к пружине подвесить тело (рис. 2.18), то под действием этой силы оно будет опускаться.
В пружине возникнет сила упругости, которая будет постепенно возрастать.
Когда сила упругости сравняется с силой тяготения ( = mg), тело будет находиться в состоянии покоя. Обе рассмотренные силы приложены к одному телу и направлены в противоположных направлениях. В состоянии равновесия тела их равнодействующая равна нулю.
= mg), тело будет находиться в состоянии покоя. Обе рассмотренные силы приложены к одному телу и направлены в противоположных направлениях. В состоянии равновесия тела их равнодействующая равна нулю.
Силу упругости, действующую на тело со стороны подвеса или опоры, называют силой реакции опоры.
Природа сил упругости — электромагнитная. Она обусловлена взаимодействием молекул и атомов, из которых и состоят тела (положительно заряженные протоны, которые входят в состав ядер атомов, и электроны, движущиеся вокруг ядер).
Силы взаимодействия между молекулами и атомами имеют такую особенность: при увеличении расстояния между ними они являются силами притяжения, а при уменьшении — силами отталкивания. Этим и объясняется возникновение сил упругости и направление их действия.
Сила упругости направлена перпендикулярно (нормально) к поверхности столкновения тел, а в случае с деформированными телами (стержнями, пружинами, нитками, тросами и т. п.) – вдоль их осей.
Пример №4
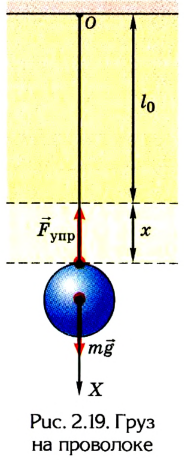
К проволоке подвесили груз массой 10 кг (рис. 2.19). Длина проволоки увеличилась на 0,5 мм. Какова ее жесткость, если ускорение силы тяжести 10 
Дано:
m = 10 кг,
х = 0,5мм,
g =10 
Груз, подвешенный на пружине, -находится в состоянии покоя. Сила упругости  по модулю равна силе тяжести
по модулю равна силе тяжести  Одинаковы и модули их проекций на ось ОХ (направлена вертикально вниз):
Одинаковы и модули их проекций на ось ОХ (направлена вертикально вниз):
 или
или 
Таким образом, mg = kx, отсюда 
Ответ: 
Работа силы упругости
Как известно, сила упругости — это сила, возникающая при деформации тела внешними воздействиями. Наиболее удобно изучать действие этой силы на примере пружин или резинового шнура, поскольку достаточно малые внешние силы вызывают значительное изменение их длины, которое легко можно измерить.
Рассмотрим систему, состоящую из пружины и тела некоторой массы, лежащего на достаточно гладкой горизонтальной поверхности (рис. 137, а). Правый конец пружины прикреплен к стене, а левый — к телу. Направим ось Ох, как показано на рисунке 137. Если тело сместить на расстояние х1 от положения равновесия, то пружина будет действовать на него с силой упругости (рис. 137, б), направленной влево. Модуль проекции этой силы на ось Ox равен kx1, где k — жесткость пружины.
Теперь отпустим тело. Тогда под действием силы упругости пружины тело будет смещаться влево. При этом движении сила упругости совершает работу.
Предположим, что тело переместилось из положения А в положение В (рис. 137, в) так, что расстояние от положения равновесия стало х2. Модуль перемещения тела равен x1-x2. Направления действия силы и перемещения тела совпадают.
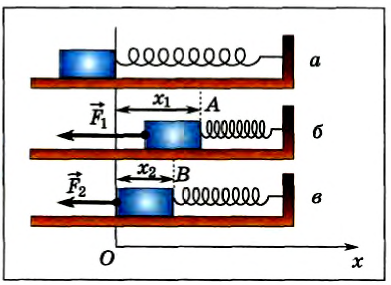
Рис. 137
Для нахождения работы, совершенной пружиной по перемещению тела, необходимо учесть, что сила упругости меняется, так как ее величина зависит от удлинения пружины. Воспользуемся графиком зависимости модуля силы от удлинения пружины (рис. 138). Как нам уже известно, работа силы численно равна площади под графиком силы. В нашем случае площади трапеции. Нетрудно сообразить, что

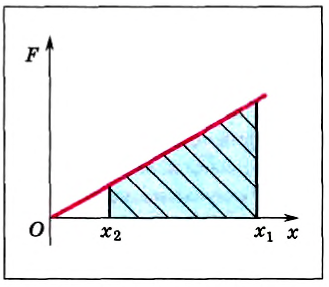
Рис. 138
Из полученной формулы следует, что работа силы упругости пружины зависит только от координат x1 и х2 начального и конечного положений. Из рисунка 137 видно, что x1 и х2 — это и удлинение пружины, и координаты ее конца в выбранной системе координат. Следовательно, работа силы упругости не зависит от формы траектории. А если траектория замкнута, то работа равна нулю. Итак, сила упругости является потенциальной силой. Удлинение пружины или резинового шнура часто обозначают через Δl, поэтому
 (2)
(2)
где ∆l1 и Δl2 — удлинения пружины в начальном и конечном положениях.
Формулу (1) для работы силы упругости можно записать и в таком виде:
 (3)
(3)
В правой части полученного равенства стоит изменение величины со знаком «минус». Поэтому, как и в случае силы тяжести, величина
со знаком «минус». Поэтому, как и в случае силы тяжести, величина  представляет собой потенциальную энергию упруго деформированного тела:
представляет собой потенциальную энергию упруго деформированного тела:
 (4)
(4)
 (5)
(5)
Таким образом, работа силы упругости равна изменению потенциальной энергии упруго деформированного тела (пружины), взятому с противоположным знаком.
Если в конечном состоянии удлинение пружины равно нулю, то формула (5) с учетом (1) принимает вид:
Отсюда следует, что потенциальная энергия упруго деформированной пружины равна работе сил упругости при переходе тела (пружины) в состояние, в котором его деформация равна нулю. Например, растянутая пружина закрывает дверь подъезда (рис. 139).

Рис. 139
О потенциальной энергии тела, на которое действует сила тяжести, мы говорили, что это энергия взаимодействия тела с Землей. Потенциальная энергия упруго деформированного тела — это тоже энергия взаимодействия. Однако в этом случае речь идет о взаимодействии частиц, из которых состоит тело.
Главные выводы:
- Работа силы упругости не зависит от формы траектории тела, а определяется положением тела в начальном и конечном состояниях.
- Сила упругости является потенциальной силой.
- Потенциальная энергия упруго деформированного тела равна работе сил упругости при переходе в недеформированное состояние.
Силы электромагнитной природы
Известно, что наэлектризованные электрическим зарядом тела притягиваются или отталкиваются силами электрического характера. Если же электрические заряды в телах будут двигаться друг относительно друга, то дополнительно к электрическим силам между телами возникают магнитные силы. Эти силы, прочно связанные между собой, невозможно отделить друг от друга, потому что они действуют одновременно. Поэтому говорят, что взаимодействие между наэлектризованными телами происходит в результате действия сил электромагнитной природы. Силы упругости и трения, являющиеся причиной изменения скорости механического движения тела, также являются силами электромагнитной природы.
Сила упругости – это сила электромагнитной природы.
Как вы знаете, любое твердое тело под действием внешней силы испытывает деформацию.
Деформацией называется изменение формы и размеров тела под действием внешней силы. В результате деформации происходит смещение атомов и молекул относительно друг друга: расстояние между атомами или увеличивается, или уменьшается. Такое смещение вызывает соответствующее увеличение или уменьшение действия сил электростатического взаимодействия зарядов внутри атомов (положительных ядер и отрицательных электронов). В результате, в деформированной части тела возникает сила электромагнитной природы, “старающаяся” вернуть тело в первоначальное состояние — силой упругости.
Сила упругости – это сила, возникающая при деформациях твердого тела и действующая в направлении восстановления тела в первоначальном состоянии.
Если после прекращения действия на тело внешней силы оно под действием силы упругости полностью восстанавливает свою форму и размеры, то такая деформация называется упругой деформацией, если же это не происходит, пластической деформацией.
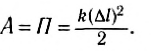
Различают следующие виды деформации: растяжение-сжатие, изгиб, кручение и сдвиг. При деформации растяжение-сжатие изменяется расстояние между частями тела, а при деформации сдвига части тела сдвигаются параллельно друг другу. Деформация изгиб состоит из комбинации деформации сжатия и растяжения частей твердого тела, а деформация кручения из комбинации деформации сдвига (b).
Закон Гука
Деформация растяжение-сжатие твердого тела характеризуется величинами, называемыми абсолютным удлинением и относительным удлинением.
Здесь  – начальная, а
– начальная, а  — конечная длина твердого тела,
— конечная длина твердого тела,  – его абсолютное удлинение, а
– его абсолютное удлинение, а  – относительное удлинение (если
– относительное удлинение (если  то наблюдается упругая деформация). В СИ
то наблюдается упругая деформация). В СИ  – безразмерная величина.
– безразмерная величина.
Твердое тело, находящееся в деформированном состоянии, характеризуется механическим напряжением.
Механическое напряжение — это физическая величина, равная отношению модуля силы упругости  возникшей во время деформации, к площади поперечного сечения тела
возникшей во время деформации, к площади поперечного сечения тела 

Единица измерения механического напряжения в СИ – паскаль (Па):

Закон Гука: При малых деформациях механическое напряжение прямо пропорционально относительному удлинению:

 – коэффициент пропорциональности, называемый модулем Юнга.
– коэффициент пропорциональности, называемый модулем Юнга.
Модуль Юнга – это физическая величина, численно равная механическому напряжению, необходимому для увеличения длины тонкого стержня в два раза. Модуль Юнга зависит от материала, из которого изготовлено тело, единица его измерения в СИ — паскаль: 
Приняв во внимание уравнения (2.24) и (2.25) в законе Гука (2.26), получим:

Здесь

называется коэффициентом упругости или жесткостью стержня.
Жесткость, являясь коэффициентом пропорциональности между силой упругости и абсолютным удлинением, зависит от материала, из которого изготовлено тело, и его геометрических размеров.
Приняв во внимание формулу (2.28) в формуле (2.27), закон Гука можно записать следующим образом:

Обычно закон Гука имеет вид:

Где  выражает абсолютное удлинение, а знак минус показывает, что сила упругости направлена против направления смещения частиц тела (против удлинения).
выражает абсолютное удлинение, а знак минус показывает, что сила упругости направлена против направления смещения частиц тела (против удлинения).
Единица измерения жесткости в СИ: 
Диаграмма растяжения
Диаграмма растяжения – это график зависимости механического напряжения от относительного удлинения твердого тела. На диаграмме (с):
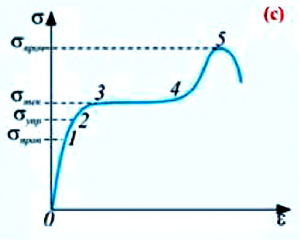
a) участок 0-1 – это участок, на котором при малых деформациях механическое напряжение прямо пропорционально относительному удлинению, то есть выполняется закон Гука.
Максимальное значение механического спряжения, при котором еще выполняется закон Гука, называется пределом пропорциональности 
На участке графика выше цифры 1 закон Гука нарушается, наблюдается нелинейная деформация;
b) участок 1-2 — соответствует участку, на котором упругая деформация сохраняется, то есть после прекращения внешнего воздействия образец возвращается к своим первоначальным размерам.
Максимальное напряжение, при котором еще возникает упругая деформация, называется пределом упругости  Механическое напряжение больше предела упругости вызывает пластическую деформацию;
Механическое напряжение больше предела упругости вызывает пластическую деформацию;
c) участок 2-3 – механическое напряжение, соответствующее пластической деформации;
d) участок 3-4 — это участок “текучести” образца. Механическое напряжение  имеет постоянное значение, относительное удлинение увеличивается;
имеет постоянное значение, относительное удлинение увеличивается;
e) участок 4—5 — это участок с резким увеличением механического напряжения, соответствует разрушению тела.
Максимальное механическое напряжение, приводящее к разрушению тела, называется пределом прочности 
Силы упругости и упругие деформации
Сила упругости (реакции) возникает в ответ на действие деформирующей силы. Она противоположна по направлению и равна по модулю деформирующей силе. Сила упругости приложена к телу, находящемуся на опоре или подвесе.
Силы упругости обусловлены взаимодействиями между атомами и, как и силы трения, являются по своей природе электромагнитными силами. Они возникают при смещении атомов вещества из положений равновесия. В результате деформации силы электрических взаимодействий стремятся возвратить атомы в первоначальные положения.
Деформация — изменение формы или размеров тела, обусловленное изменением взаимного расположения атомов тела под действием внешних сил или при изменении температуры тела.
Если после прекращения действия сил размер и форма тела полностью восстанавливаются, то деформация называется упругой, а если нет — пластической.
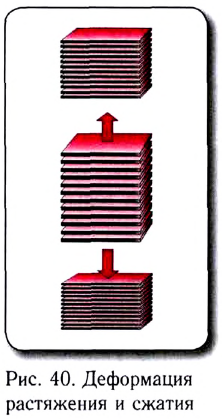
Деформации бывают нескольких видов: растяжение или сжатие (рис. 40); сдвиг (рис. 41); кручение (рис. 42); изгиб (рис. 43).

Упругое тело — одна из механических моделей физических тел, используемая для описания в тех случаях, когда деформацией тела пренебречь нельзя.
Силы упругости возникают между телами только в том случае, если тела деформированы. Движение упругого тела или его взаимодействие с другими телами сопровождается такими изменениями формы, что при прекращении взаимодействия или возврате к исходному механическому состоянию его первоначальная форма восстанавливается. Это означает, что в упругом теле можно пренебречь остаточной деформацией, т. е. изменениями формы и размеров тел после прекращения их взаимодействия.
Особенности сил упругости:
- возникают вследствие деформации одновременно у двух взаимодействующих тел;
- перпендикулярны поверхностям взаимодействующих тел;
- по направлению противоположны смещению частиц деформируемого тела;
- при упругих деформациях выполняется закон Гука:
модуль силы упругости  возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию) 

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Из соотношения (1) определим жесткость тела:

Единицей жесткости в СИ является ньютон на метр 
Жесткость k не зависит от приложенных сил и величины деформации и определяется только размером деформируемого тела и веществом, из которого оно состоит.
Впервые свой закон Роберт Гук опубликовал в 1676 г. в виде анаграммы ut tension sic vis — как напряжение, так сила.
Деформации характеризуют двумя величинами: абсолютное удлинение (сжатие)  и относительное удлинение (сжатие)
и относительное удлинение (сжатие) 
Пружина является моделью деформируемого тела, деформации которого подчиняются закону Гука. Она обладает пренебрежимо малой массой и описывается двумя параметрами — длиной в недеформированном состоянии  и жесткостью k.
и жесткостью k.
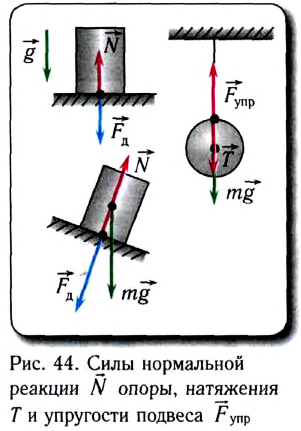
Со стороны опоры на тело действует сила нормальной реакции опоры  (рис. 44), которая возникает вследствие деформации опоры. Со стороны тела на опору действует сила давления
(рис. 44), которая возникает вследствие деформации опоры. Со стороны тела на опору действует сила давления  Со стороны подвеса на тело действует сила упругости нити
Со стороны подвеса на тело действует сила упругости нити  Со стороны тела на подвес действует сила натяжения подвеса
Со стороны тела на подвес действует сила натяжения подвеса  направленная вниз.
направленная вниз.
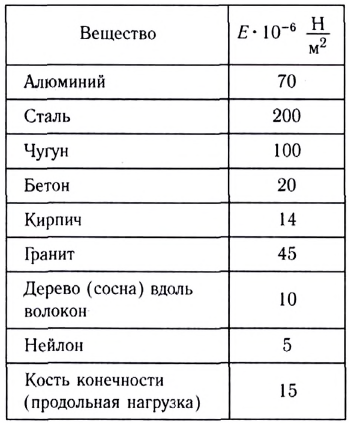
Для тонкого однородного упругого стержня, деформированного некоторой силой  направленной вдоль него, модуль абсолютного удлинения (сжатия)
направленной вдоль него, модуль абсолютного удлинения (сжатия)  прямо пропорционален длине стержня
прямо пропорционален длине стержня  обратно пропорционален площади его поперечного сечения S и определяется упругими свойствами вещества, задаваемыми модулем упругости или модулем Юнга E:
обратно пропорционален площади его поперечного сечения S и определяется упругими свойствами вещества, задаваемыми модулем упругости или модулем Юнга E:

Для выяснения физического смысла модуля Юнга и определения единицы его измерения выразим Е из приведенной формулы:

Если предположить, что в этом соотношении  то модуль Юнга численно равен силе, способной увеличить длину образца вдвое, если площадь его поперечного сечения равна единице. На практике такое удлинение возможно только для резины или искусственно создаваемых материалов.
то модуль Юнга численно равен силе, способной увеличить длину образца вдвое, если площадь его поперечного сечения равна единице. На практике такое удлинение возможно только для резины или искусственно создаваемых материалов.
Единицей модуля упругости Е в СИ является ньютон на метр квадратный 
Модули Юнга некоторых веществ приведены в таблице 1.
Таблица 1
Модули Юнга Е некоторых веществ
Еще одной из основных величин, характеризующих механические свойства тел, является механическое напряжение которое позволяет записать закон
которое позволяет записать закон
Гука с использованием модуля Юнга и относительного удлинения. Из формулы для модуля упругости следует, что 
Откуда, с учетом определения относительного удлинения и напряжения, находим 
Жесткость стержня k определяется через модуль упругости (модуль Юнга) Е, его длину  и площадь поперечного сечения S соотношением
и площадь поперечного сечения S соотношением

Сила упругости и вес тела
Первый в мире космонавт Ю. А. Гагарин вспоминал: «я почувствовал, что какая-то непреодолимая сила все больше вжимает меня в кресло. И хотя оно было расположено так, чтобы минимизировать влияние гигантского веса, который навалился на мое тело, было трудно пошевелить рукой и ногой».

Нажмем на кнопку авторучки — пружина в корпусе сожмется, и ее длина уменьшится; помнем в руке кусочек пластилина — изменится его форма; надавим пальцем на губку — одновременно изменятся и форма, и размеры губки.
Изменение формы и (или) размеров тела называют деформацией.
Если прекратить сжимать пружину, давить на губку, то есть устранить действие внешних сил, и пружина, и губка полностью восстановят свои форму и размеры, то есть перестанут быть деформированными (рис. 12.1). А вот форма кусочка пластилина не восстановится — пластилин ее «не помнит» и останется деформированным.
Рис. 12.1. После прекращения действия силы упругие тела восстанавливают свои форму и размеры
Деформации, которые полностью исчезают после прекращения действия на тело внешних сил, называют упругими; деформации, которые сохраняются, называют пластическими.
Причина возникновения и упругой, и пластической деформаций в том, что под действием сил, приложенных к телу, его различные части смещаются относительно друг друга. По характеру смещения частей различают деформации сжатия, растяжения, сдвига, изгиба, кручения. Остановимся на упругой деформации сжатия и растяжения. Для этого воспользуемся механической моделью твердого тела (рис. 12.2).
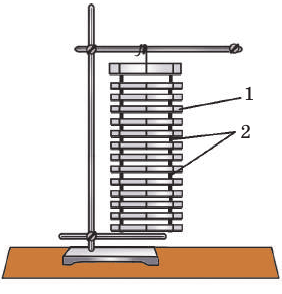
Рис. 12.2. Механическая модель твердого тела: параллельные пластины (1), имитирующие слои молекул, соединены пружинами (2), имитирующими взаимодействия между молекулами
Нажмем на модель твердого тела сверху рукой: верхние пластины начнут смещаться вниз, нижние же останутся почти неподвижными, и в результате модель изменит размеры — деформируется. Примерно так же при сдавливании твердого тела смещаются в направлении действия силы слои его молекул, в результате чего размеры тела уменьшаются. Такую деформацию называют деформацией сжатия — ее испытывают ножки столов и стульев, фундаменты домов и т. п. (см. рис. 12.3, а).
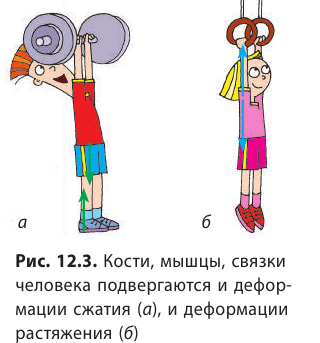
Если же тело растягивать, слои молекул раздвинутся и тело также изменит свои размеры. Такую деформацию называют деформацией растяжения — ее испытывают тросы, цепи в подъемных устройствах, стяжки между вагонами и т. д. (см. рис. 12.3, б).
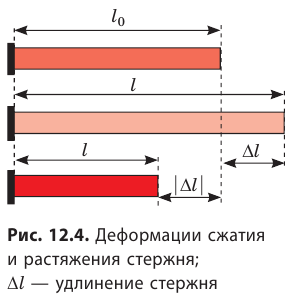
Физическую величину, равную изменению длины тела при деформации растяжения или сжатия, называют удлинением ∆l (или x):
где l — длина деформированного тела;  — начальная длина тела (рис. 12.4).
— начальная длина тела (рис. 12.4).
Когда возникает сила упругости
Если вы сгибаете ветку дерева, сжимаете эспандер, натягиваете тетиву лука, то есть деформируете эти тела, вы чувствуете их сопротивление: со стороны тел начинает действовать сила, стремящаяся восстановить то состояние тела, в котором тело находилось до деформации. Эту силу называют силой упругости (рис. 12.5).
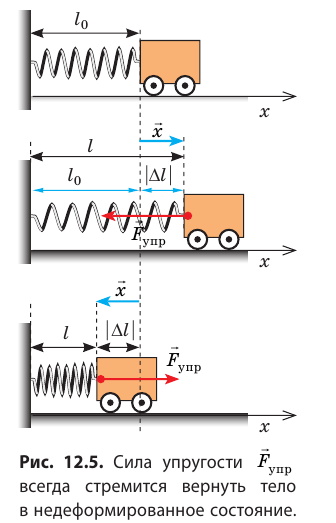
Сила упругости  — это сила, которая возникает при деформации тела и стремится вернуть тело в недеформированное состояние. Изучая деформацию тонких длинных стержней, английский естествоиспытатель Роберт Гук (1635–1703) установил закон, позже получивший название закон Гука:
— это сила, которая возникает при деформации тела и стремится вернуть тело в недеформированное состояние. Изучая деформацию тонких длинных стержней, английский естествоиспытатель Роберт Гук (1635–1703) установил закон, позже получивший название закон Гука:
При малых упругих деформациях растяжения или сжатия сила упругости прямо пропорциональна удлинению тела:
Знак «–» показывает, что сила упругости направлена в сторону, противоположную удлинению.
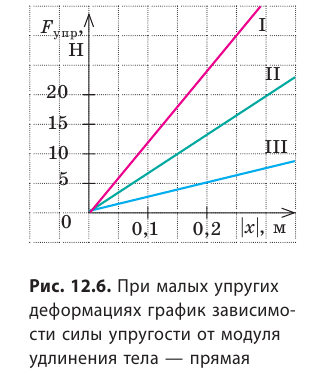
Закон Гука можно записать и для модулей:  , где x = ∆l — удлинение. Поскольку сила упругости прямо пропорциональна удлинению тела, график зависимости
, где x = ∆l — удлинение. Поскольку сила упругости прямо пропорциональна удлинению тела, график зависимости  — прямая (рис. 12.6).
— прямая (рис. 12.6).
Коэффициент пропорциональности k называют жесткостью тела (стержня, балки, шнура, пружины). Жесткость тела можно определить, воспользовавшись законом Гука:
Единица жесткости в СИ — ньютон на метр:  .
.
- Жесткость — это характеристика тела, поэтому она не зависит ни от силы упругости, ни от удлинения тела.
- Жесткость зависит от упругих свойств материала, из которого изготовлено тело; от формы тела и его размеров.
Какова природа силы упругости
Известно, что все тела состоят из атомов (молекул, ионов), а те, в свою очередь, — из ядра, имеющего положительный заряд, и электронного облака, заряд которого отрицательный. Между заряженными составляющими частиц вещества существуют силы электромагнитного притяжения и отталкивания.
Если тело не деформировано, силы притяжения равны силам отталкивания. При деформации взаимное расположение частиц в теле изменяется. Если расстояние между частицами увеличивается, то электромагнитные силы притяжения становятся больше, чем силы отталкивания, и частицы начинают притягиваться друг к другу. Если расстояние между частицами уменьшается, то больше становятся силы отталкивания. Другими словами, частицы вещества «стремятся» вернуться к состоянию равновесия. Таким образом, сила упругости — результат электромагнитного взаимодействия частиц вещества.
Некоторые виды сил упругости
Обычно силу упругости обозначают символом  . Однако есть силы упругости, для обозначения которых используются отдельные символы. Если тело расположено на опоре, то опора деформируется (прогибается).
. Однако есть силы упругости, для обозначения которых используются отдельные символы. Если тело расположено на опоре, то опора деформируется (прогибается).
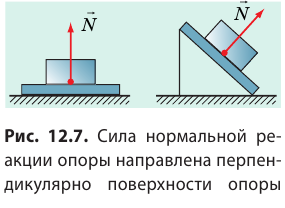
Деформация опоры вызывает появление силы упругости, действующей на тело перпендикулярно поверхности опоры. Эту силу называют силой нормальной реакции опоры и обозначают символом  (рис. 12.7).
(рис. 12.7).
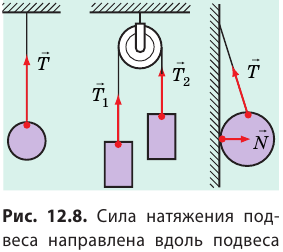
Если тело закрепить на подвесе (нити, жгуте, шнуре), то подвес деформируется (растягивается) и будет действовать на тело с определенной силой упругости, направленной вдоль подвеса, — силой натяжения подвеса  (рис. 12.8).
(рис. 12.8).
Все тела вследствие гравитационного притяжения сдавливают или прогибают опору либо растягивают подвес. Силу, характеризующую такое действие тел, называют весом и обозначают символом  .
.
На рис. 12.9, 12.10 показано, как возникает эта сила, если тело находится вблизи поверхности Земли и действует на горизонтальную опору или вертикальный подвес. В таких случаях согласно третьему закону Ньютона вес тела по модулю равен силе нормальной реакции опоры или силе натяжения подвеса и направлен противоположно им:  .
.
Именно такие случаи возникновения веса тела мы будем рассматривать далее. Обратите внимание! Если тело находится в состоянии покоя или равномерного прямолинейного движения, то вес тела по модулю равен силе тяжести (  ) и совпадает с ней по направлению.
) и совпадает с ней по направлению.
Действительно, в таком случае сила тяжести и сила нормальной реакции опоры (или сила натяжения подвеса) скомпенсированы, поэтому они равны по модулю и противоположны по направлению: ; так как
; так как Но, в отличие от силы тяжести, которая приложена к телу, вес приложен к опоре или подвесу.
Но, в отличие от силы тяжести, которая приложена к телу, вес приложен к опоре или подвесу.
Вес тела и сила тяжести различаются и по своей природе: сила тяжести — это гравитационная сила, а природа веса тела — электромагнитная.
При каких условиях вес тела изменяется
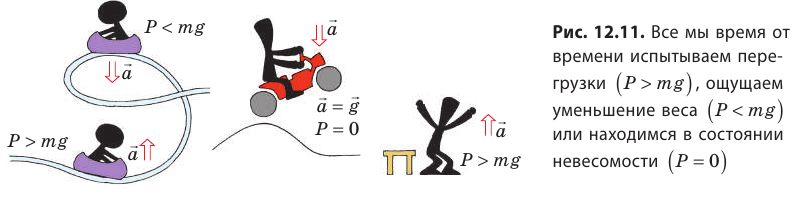
Нам кажется, что в невесомости находятся только космонавты на орбите, а перегрузки испытывают только летчики при выполнении фигур высшего пилотажа и космонавты. Но это не так.
| Увеличение веса (перегрузка) | Увеличение веса (перегрузка) Уменьшение веса |
|---|---|
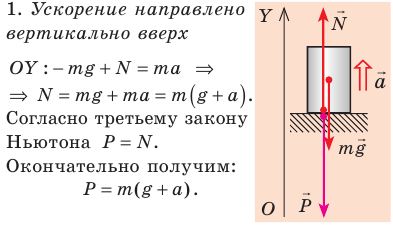
Рассмотрим тело, которое находится на опоре и вместе с ней движется в гравитационном поле Земли с ускорением  . На тело действуют две силы: сила тяжести . На тело действуют две силы: сила тяжести  и сила нормальной реакции опоры и сила нормальной реакции опоры  . Свяжем систему координат с Землей и направим ось ОY вертикально вверх. Согласно второму закону Ньютона: . Свяжем систему координат с Землей и направим ось ОY вертикально вверх. Согласно второму закону Ньютона: 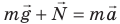 . Запишем это уравнение в проекциях на ось ОY для двух случаев. . Запишем это уравнение в проекциях на ось ОY для двух случаев. |
|
 |
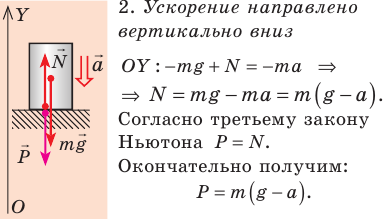 |
| Вес тела, которое движется с ускорением, направленным вертикально вверх, больше, чем вес этого же тела в состоянии покоя. Когда есть перегрузки, не только тело сильнее давит на опору, но и части тела сильнее давят друг на друга. | Вес тела, которое движется с ускорением, направленным вертикально вниз, меньше, чем вес этого же тела в состоянии покоя. Если в этом случае ускорение движения тела равно ускорению свободного падения  вес тела равен нулю. вес тела равен нулю. |
Как испытать состояние невесомости
Состояние тела, при котором вес тела равен нулю, называют состоянием невесомости. В состоянии невесомости на тело действует только сила тяжести (тело свободно падает), и наоборот: если тело движется только под действием силы тяжести, оно находится в состоянии невесомости. В состоянии невесомости тело не давит на опору и части тела не давят друг на друга; космонавт на орбите (вспомните: на орбите космический корабль движется только под действием силы тяжести) не чувствует своего веса, предмет, выпущенный из его рук, не падает. Дело в том, что сила тяжести сообщает каждому телу и любой части тела одинаковое ускорение.
Чтобы испытать состояние невесомости, достаточно подпрыгнуть. А вот для тренировки космонавтов используют тот факт, что из-за действия силы тяжести траектория тела, брошенного под углом к горизонту, — параболическая. Если в верхних слоях атмосферы самолет направить по восходящей траектории («бросить» под углом к горизонту) и существенно уменьшить тягу двигателей, то некоторое время все тела в самолете будут находиться в состоянии невесомости.
Пример №5
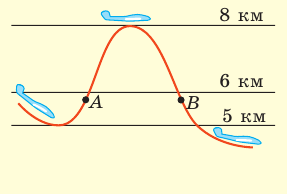
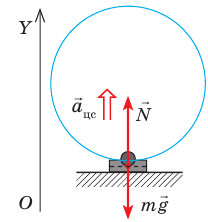
Самолет делает «мертвую петлю», описывая в вертикальной плоскости окружность радиусом 250 м. Во сколько раз вес летчика в нижний части траектории больше силы тяжести, если скорость движения самолета 100 м/с?
Анализ физической проблемы. Самолет движется по окружности, а значит, летчик имеет центростремительное ускорение. На пояснительном рисунке изобразим силы, действующие на летчика, и направление его ускорения. Выберем одномерную систему координат, которую свяжем с точкой на поверхности Земли, ось ОY направим вертикально вверх.
Решение:
По второму закону Ньютона:  .
.
В проекциях на ось ОY: 
По третьему закону Ньютона P N= , поэтому 
Окончательно: 
Найдем значения искомых величин:
Анализ результата. Вес летчика в 5 раз больше силы тяжести — это реальный результат.
Ответ:  = 5.
= 5.
Алгоритм решения задач на движение тела под действием нескольких сил
- Прочитайте условие задачи. Выясните, какие силы действуют на тело, движется тело с ускорением или равномерно прямолинейно.
- Запишите краткое условие задачи. При необходимости переведите значения физических величин в единицы СИ.
- Выполните рисунок, на котором укажите силы, действующие на тело, и направление ускорения движения тела.
- Выберите инерциальную СО. Количество осей координат и их направление выберите, исходя из условия задачи.
- Проверьте единицу, найдите числовое значение искомой величины
- Проанализируйте результат. Запишите ответ.
- Запишите уравнение второго закона Ньютона в векторном виде и в проекциях на оси координат. Запишите формулы для вычисления сил. Получив систему уравнений, решите ее. Если в задаче есть дополнительные условия, используйте их.
Выводы:
- Деформацией называют изменение формы или (и) размеров тела. Если после прекращения действия на тело внешних сил деформация полностью исчезает, это упругая деформация; если деформация сохраняется, это пластическая деформация.
- Силу, которая возникает в теле при его деформации и стремится вернуть тело в недеформированное состояние, называют силой упругости. Сила упругости имеет электромагнитную природу, ее можно рассчитать по закону Гука:
 , где k — жесткость тела. Закон Гука выполняется только при малых упругих деформациях.
, где k — жесткость тела. Закон Гука выполняется только при малых упругих деформациях. - Вес тела
 — это сила, с которой вследствие гравитационного притяжения тело давит на опору или растягивает подвес. Если опора горизонтальная или подвес вертикальный, согласно третьему закону Ньютона вес тела равен по модулю и противоположен по направлению силе нормальной реакции опоры (силе натяжения подвеса):
— это сила, с которой вследствие гравитационного притяжения тело давит на опору или растягивает подвес. Если опора горизонтальная или подвес вертикальный, согласно третьему закону Ньютона вес тела равен по модулю и противоположен по направлению силе нормальной реакции опоры (силе натяжения подвеса):  .
. - Если тело находится в состоянии покоя или движется равномерно прямолинейно, вес тела по модулю равен силе тяжести:
 .
. - Если тело движется с ускорением, направленным вертикально вверх, это тело испытывает перегрузки (вес тела больше, чем его вес в состоянии покоя):
 .
. - Если тело движется с ускорением, направленным вертикально вниз, вес тела меньше, чем его вес в состоянии покоя:
Физика в цифрах:
- P= 0 — отсутствие нагрузки (состояние невесомости).
- P=mg — «нормальная» нагрузка (на поверхности Земли).
- P= 3 mg — максимальная нагрузка, которая ощущается на «американских горках».
- P= 4,3 mg — максимальная нагрузка, на которую рассчитаны пассажирские самолеты.
- P= 5 mg — нагрузка, при которой большинство людей теряют сознание.
- P= 9 mg — нагрузка, которую может испытывать человек за штурвалом истребителя при крутых виражах.
- Деформация в физике
- Плотность вещества в физике
- Сила трения в физике
- Вес тела в физике
- Масса тела в физике
- Сила в физике
- Силы в механике
- Сила тяжести в физике
Сила упругости
Любое тело, когда его деформируют и оказывают внешнее воздействие, сопротивляется и стремиться восстановить прежние форму и размеры. Это происходит по причине электромагнитного взаимодействия в теле на молекулярном уровне.
Деформация – изменение положения частиц тела друг относительно друга. Результат деформации – изменение межатомных расстояний и перегруппировка блоков атомов.
Сила упругости – сила, возникающая при деформации в теле и стремящаяся вернуть тело в начальное состояние.
Рассмотрим простейшие деформации – растяжение и сжатие

На рисунке показано, как действует сила упругости, когда мы сжимаем или растягиваем стержень.
Закон Гука
Для малых деформаций x≪ l справедлив закон Гука.
Деформация, возникающая в упругом теле, пропорциональна приложенной к телу силе.
Fупр=-kx
Здесь k – коэффициент пропорциональности, называемый жесткостью. Единица измерения жесткости системе СИ Ньютон на метр. Жесткость зависит от материала тела, его формы и размеров.
Знак минус показывает, что сила упругости противодействует внешней силе и стремится вернуть тело в первоначальное состояние.
Существуют и другие формы записи закона Гука. Относительной деформацией тела называется отношение ε=xl. Напряжением в теле называется отношение σ=-FупрS. Здесь S – площадь поперечного сечения деформированного тела. Вторая формулировка закона Гука: относительная деформация пропорциональна напряжению.
ε=σE.
Здесь E – так называемый модуль Юнга, который не зависит от формы и размеров тела, а зависит только от свойств материала. Значение модуля Юнга для различных материалов широко варьируется. Например, для стали E≈2·1011 Нм2, а для резины E≈2·106 Нм2
Закон Гука можно обобщить для случая сложных деформаций. Рассмотрим деформацию изгиба стержня. При такой деформации изгиба сила упругости пропорциональна прогибу стержня.

Концы стержня лежат на двух опорах, которые действуют на тело с силой N→, называемой силой нормальной реакции опоры. Почему нормальной? Потому что эта сила направлена перпендикулярно (нормально) поверхности соприкосновения.
Если стержень лежит на столе, сила нормальной реакции опоры направлена вертикально вверх, противоположно силе тяжести, которую она уравновешивает.
Вес тела – это сила, с которой оно действует на опору.
Силу упругости часто рассматривают в контексте растяжения или сжатия пружины. Это распространенный пример, который часто встречается не только в теории, но и на практике. Пружины используются для измерения величины сил. Прибор, предназначенный для этого – динамаметр.
Динамометр – пружина, растяжение которой проградуированно в единицах силы. Характерное свойство пружин заключается в том, что закон Гука для них применим при достаточно большом изменении длины.
При сжатии и растяжении пружины действует закон Гука, возникают упругие силы, пропорциональные изменению длины пружины и ее жесткости (коэффициента k).
В отличие от пружин стержни и проволоки подчиняются закону Гука в очень узких пределах. Так, при относительной дефомации больше 1% в материале возникают необратимые именения – текучесть и разрушения.
