При питании обмотки
статора трехфазным током создается
вращающееся магнитное поле, частота
вращения которого
![]() (об/мин), (2.1)
(об/мин), (2.1)
где
f1
– частота питающего напряжения, p
– число пар полюсов. Поскольку номинальная
частота вращения ротора асинхронных
двигателей близка к синхронной частоте,
т.е. частоте вращения магнитного поля,
то ее значение выбирается ряда синхронных
частот вращения (3000; 1500; 1000; 750… об/мин)
наиболее близких номинальной частоте.
Если
n2
= 2979 об/мин, то синхронная частота вращения
n1
= 3000 об/мин.
2.3. Расчет номинального
скольжения
Скольжение
вычисляется по следующей формуле:
![]() . (2.2.)
. (2.2.)
-
Расчет номинального
и критического момента двигателя
Номинальный момент
двигателя рассчитывается по формуле
![]() . (2.3)
. (2.3)
Тогда критический
момент будет равен
![]() (2.4.)
(2.4.)
-
Расчет критического
скольжения
Критическое
скольжение найдем из уравнения Клосса
после подстановки в него номинального
скольжения и момента
 . (2.5)
. (2.5)
Выражая
критическое скольжение через кратность
номинального момента λ, получим
уравнение для вычисления критического
скольжения
![]() .
.
(2.6)
-
Расчет параметров
Г – образной схемы замещения
асинхронного
двигателя
Расчет
параметров схемы замещения (рисунок
2.1)будем проводить в предположении
равенства активных и индуктивных
сопротивлений статора и ротора
![]()
![]() (2.7.)
(2.7.)

Рисунок 2.1 Г –
образная схема замещения асинхронного
двигателя.
Из уравнения для
критического скольжения
 (2.8)
(2.8)
найдем для
двигательного режима, что
![]() (2.9)
(2.9)
Знак «+» относится
к двигательному режиму, знак «-» к
генераторному.
Подставим
полученное выражение в уравнение для
критического момента
 , (2.10)
, (2.10)
тогда
 . (2.11)
. (2.11)
Откуда для
двигательного режима
 (2.12)
(2.12)
Подставляя
полученные значения R1
и R’
2
в (2.9) найдем индуктивное сопротивление
короткого замыкания xk
![]() . (2.13)
. (2.13)
Учитывая (2.7) найдем
индуктивные сопротивления статора и
ротора
![]() (2.14)
(2.14)
-
Векторная диаграмма асинхронного двигателя
Векторная диаграмма
асинхронного двигателя строится
аналогично векторной диаграмме
трансформатора.
2.7.1
Расчет полного сопротивления двигателя.
![]() ,
,
где
![]()
– полные сопротивления статора и ротора.
2.7.2
Расчет тока статора и ротора
![]() .
.
2.7.3
Расчет э.д.с. двигателя Е1,
Е’
2
![]() .
.
2.7.4
Расчет падения напряжения на активном
сопротивлении статора обмотки
![]() .
.
2.7.5
Расчет падения напряжения на реактивном
сопротивлении статора
![]() .
.
2.7.6
Расчет падения напряжения на активном
сопротивлении ротора
![]() .
.
-
Расчет падения
напряжения на реактивном сопротивлении
ротора
![]() .
.
Результаты
вычислений заносятся в таблицу 2.2
Таблица
2.2
|
Напряжения и |
||||||
|
U1 |
E1 |
UR1 |
UX1 |
UR2 |
UX2 |
I1 |
|
В |
В |
В |
В |
В |
В |
В |
|
Сопротивления |
||||||
|
R1 |
R’ |
X1 |
X’ |
Z |
||
|
Ом |
Ом |
Ом |
Ом |
Ом |
||
По данным таблицы
9 и комплексным уравнениям асинхронного
двигателя строим его векторную диаграмму
показанную на рисунке 8.

(2.22)
По данным таблицы
2.2. и комплексным уравнениям асинхронного
двигателя строим его векторную диаграмму
показанную на рисунке 2.2
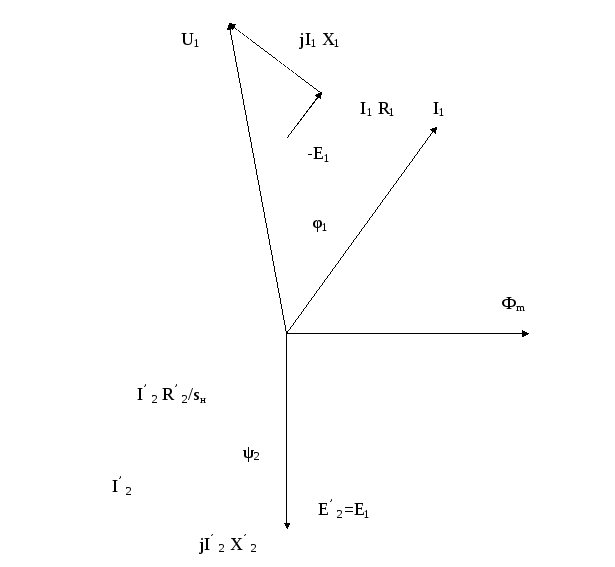 Рисунок
Рисунок
2.2. Векторная диаграмма асинхронного
двигателя.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Таблицы DPVA.ru – Инженерный Справочник
Адрес этой страницы (вложенность) в справочнике dpva.ru:  главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Поиск в инженерном справочнике DPVA. Введите свой запрос: |
 и числа полюсов (2-12), Таблица и формула для расчета..")
Поиск в инженерном справочнике DPVA. Введите свой запрос:
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста.
Вложите в письмо ссылку на страницу с ошибкой, пожалуйста.
Коды баннеров проекта DPVA.ru
Начинка: KJR Publisiers
Консультации и техническая
поддержка сайта: Zavarka Team
Free xml sitemap generator
![]()
- 1. Принцип работы электродвигателей
- 2. Однофазные электродвигатели
- 3. Мощность и вращающий момент электродвигателя
- 4. Защита электродвигателя
Принцип работы электродвигателей. Основные понятия.
Магнетизм
Наиболее характерное магнитное явление – притяжение магнитом кусков железа – известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые – отталкиваются друг от друга.

Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.

Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.

Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса – притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.

Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток – AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.

Трёхфазный переменный ток
Трёхфазное питание – это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

Для наглядности мы заменили ротор вращающимся магнитом, а статор – катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе – B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая – южным. Таким образом, если A1 – северный полюс, то A2 – южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.

Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.

Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.

Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция – это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).

Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.



Статор элетродвигателя
Статор – это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью – из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.

Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры – класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.

При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).

Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.

Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
|
Число полюсов |
Синхронная частота вращения 50 Гц |
Синхронная частота вращения 60 Гц |
|
2 |
3000 |
3600 |
|
4 |
1500 |
1800 |
|
6 |
1000 |
1200 |
|
8 |
750 |
900 |
|
12 |
500 |
600 |
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.

Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Типы оборудования в зависимости от частоты вращения вала
По этой характеристике классифицируется:
- тихоходный тип с количеством оборотов не более 300 об/мин;
- количество оборотов не превышает 1500 об/мин на электродвигателях со средней скоростью вращения;
- быстроходное оборудование выполняется числом вращения вала не более 6000;
- количество циклов за минуту не менее 6000 используются на агрегатах со сверхбыстроходностью.
Скорость вращения двигателя влияет на выбор по мощности и крутящему моменту оборудования. Для промышленных станков и больших кранов применяются агрегаты быстроходного или среднего типов. При этом величину об/мин, можно изменять с помощью мотор-редукторов и шкивов.
Определить количество, можно посмотрев бирку, но она может повредиться при эксплуатации. Существует самый простой метод определения скорости вращения, без применения дополнительного оборудования.
Двигатели постоянного тока
Резонансная частота: формула
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.

Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки.
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.
Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
ω = 2*π*ν = 2*3,14*1 = 6,28 рад./с.
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.
Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.
Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
ω = ϕ / t = 6 * t / t = 6 с-1
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Что такое вращение?

Под ним в физике понимают такое перемещение материальной точки вокруг некоторой оси, при котором ее расстояние до этой оси остается постоянным. Оно называется радиусом вращения.
Примерами этого движения в природе является вращение планет вокруг Солнца и вокруг собственной оси. В технике вращение представлено движением валов, шестеренок, колеса автомобиля или велосипеда, перемещением лопастей ветровых мельниц.
( 1 оценка, среднее 4 из 5 )
Описание параметра “Синхронная частота вращения”
Ряд синхронных частот вращения асинхронных двигателей установлен ГОСТ 10683-73 и при частоте сети 50Гц имеет следующие значения: 500, 600, 750,1000, 1500 и 3000 об/мин.
Синхронная частота вращения  [об/мин] вращающегося магнитного поля статора связана с частотой питающего напряжения сети
[об/мин] вращающегося магнитного поля статора связана с частотой питающего напряжения сети  [Гц] соотношением:
[Гц] соотношением:
 ,
,
где  — число пар магнитных полюсов обмотки статора.
— число пар магнитных полюсов обмотки статора.
В зависимости от количества числа пар полюсов возможны следующие значения частот вращения магнитного поля статора:
|
n, об/мин при 50Hz | n, об/мин при 60Hz |
|---|---|---|
| 1 | 3000 | 3600 |
| 2 | 1500 | 1800 |
| 3 | 1000 | 1200 |
| 4 | 750 | 900 |
| 5 | 600 | 720 |
| 6 | 500 | 600 |
