
Таблицы DPVA.ru – Инженерный Справочник

Адрес этой страницы (вложенность) в справочнике dpva.ru:  главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Поиск в инженерном справочнике DPVA. Введите свой запрос: |
 и числа полюсов (2-12), Таблица и формула для расчета..")
Поиск в инженерном справочнике DPVA. Введите свой запрос:
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста.
Вложите в письмо ссылку на страницу с ошибкой, пожалуйста.
Коды баннеров проекта DPVA.ru
Начинка: KJR Publisiers
Консультации и техническая
поддержка сайта: Zavarka Team
Free xml sitemap generator
![]()
При питании обмотки
статора трехфазным током создается
вращающееся магнитное поле, частота
вращения которого
![]() (об/мин), (2.1)
(об/мин), (2.1)
где
f1
– частота питающего напряжения, p
– число пар полюсов. Поскольку номинальная
частота вращения ротора асинхронных
двигателей близка к синхронной частоте,
т.е. частоте вращения магнитного поля,
то ее значение выбирается ряда синхронных
частот вращения (3000; 1500; 1000; 750… об/мин)
наиболее близких номинальной частоте.
Если
n2
= 2979 об/мин, то синхронная частота вращения
n1
= 3000 об/мин.
2.3. Расчет номинального
скольжения
Скольжение
вычисляется по следующей формуле:
![]() . (2.2.)
. (2.2.)
-
Расчет номинального
и критического момента двигателя
Номинальный момент
двигателя рассчитывается по формуле
![]() . (2.3)
. (2.3)
Тогда критический
момент будет равен
![]() (2.4.)
(2.4.)
-
Расчет критического
скольжения
Критическое
скольжение найдем из уравнения Клосса
после подстановки в него номинального
скольжения и момента
 . (2.5)
. (2.5)
Выражая
критическое скольжение через кратность
номинального момента λ, получим
уравнение для вычисления критического
скольжения
![]() .
.
(2.6)
-
Расчет параметров
Г – образной схемы замещения
асинхронного
двигателя
Расчет
параметров схемы замещения (рисунок
2.1)будем проводить в предположении
равенства активных и индуктивных
сопротивлений статора и ротора
![]()
![]() (2.7.)
(2.7.)

Рисунок 2.1 Г –
образная схема замещения асинхронного
двигателя.
Из уравнения для
критического скольжения
 (2.8)
(2.8)
найдем для
двигательного режима, что
![]() (2.9)
(2.9)
Знак «+» относится
к двигательному режиму, знак «-» к
генераторному.
Подставим
полученное выражение в уравнение для
критического момента
 , (2.10)
, (2.10)
тогда
 . (2.11)
. (2.11)
Откуда для
двигательного режима
 (2.12)
(2.12)
Подставляя
полученные значения R1
и R’
2
в (2.9) найдем индуктивное сопротивление
короткого замыкания xk
![]() . (2.13)
. (2.13)
Учитывая (2.7) найдем
индуктивные сопротивления статора и
ротора
![]() (2.14)
(2.14)
-
Векторная диаграмма асинхронного двигателя
Векторная диаграмма
асинхронного двигателя строится
аналогично векторной диаграмме
трансформатора.
2.7.1
Расчет полного сопротивления двигателя.
![]() ,
,
где
![]()
– полные сопротивления статора и ротора.
2.7.2
Расчет тока статора и ротора
![]() .
.
2.7.3
Расчет э.д.с. двигателя Е1,
Е’
2
![]() .
.
2.7.4
Расчет падения напряжения на активном
сопротивлении статора обмотки
![]() .
.
2.7.5
Расчет падения напряжения на реактивном
сопротивлении статора
![]() .
.
2.7.6
Расчет падения напряжения на активном
сопротивлении ротора
![]() .
.
-
Расчет падения
напряжения на реактивном сопротивлении
ротора
![]() .
.
Результаты
вычислений заносятся в таблицу 2.2
Таблица
2.2
|
Напряжения и |
||||||
|
U1 |
E1 |
UR1 |
UX1 |
UR2 |
UX2 |
I1 |
|
В |
В |
В |
В |
В |
В |
В |
|
Сопротивления |
||||||
|
R1 |
R’ |
X1 |
X’ |
Z |
||
|
Ом |
Ом |
Ом |
Ом |
Ом |
||
По данным таблицы
9 и комплексным уравнениям асинхронного
двигателя строим его векторную диаграмму
показанную на рисунке 8.

(2.22)
По данным таблицы
2.2. и комплексным уравнениям асинхронного
двигателя строим его векторную диаграмму
показанную на рисунке 2.2
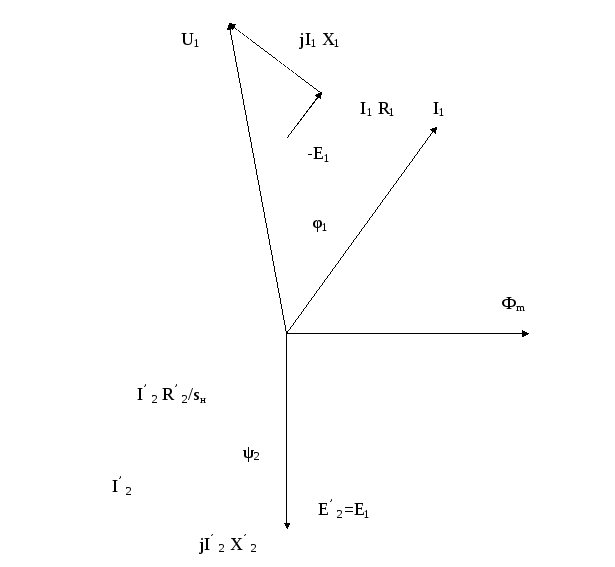 Рисунок
Рисунок
2.2. Векторная диаграмма асинхронного
двигателя.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание
- – Как узнать сколько полюсов у двигателя?
- – Чему равна синхронная скорость асинхронного двигателя с одной парой полюсов?
- – Чем больше пар полюсов?
- – Как определить частоту вращения двигателя?
- – Как определить синхронную скорость?
- – Чему пропорционален вращающий момент?
- – Как посчитать частоту вращения вала?
- – Какое количество полюсов должно быть у синхронного генератора имеющего частоту тока 50 Гц?
- – Как узнать мощность электродвигателя мультиметром?
- – Как определить частоту вращения магнитного поля?
Как узнать сколько полюсов у двигателя?
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (500/750/1000/1500).
Чему равна синхронная скорость асинхронного двигателя с одной парой полюсов?
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Чем больше пар полюсов?
И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора. Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя.
Как определить частоту вращения двигателя?
Исходя из формулы n = (1 – S)60f/p где n – скорость вращения ротора, S – скольжение, f- частота питающей сети, p – количество пар полюсов. Существует три способа регулирования скорости вращения асинхронного двигателя: – изменение скольжения. Этот способ используется в двигателях с фазным ротором.
Как определить синхронную скорость?
Синхронная скорость вращения обычных асинхронных двигателей выражается как:
- n = 60*f *2 / p (1)
- где
- n = скорость вращения штока (об/мин, rpm)
- f = частота (ГЦ=Hz; оборотов/с; 1/с)
- p =число полюсов, !!! если формула дается в виде n = (60*f ) / p, то под p понимается число пар полюсов, а не число полюсов!!!
Чему пропорционален вращающий момент?
т. е. вращающий момент асинхронного двигателя пропорционален результирующему магнитному потоку и активной составляющей тока в обмотке ротора. Коэффициент пропорциональности с зависит от конструктивных параметров двигателя.
Как посчитать частоту вращения вала?
Определение частоты вращения вала электродвигателя nэд = n2 ∙ i, где i − передаточное отношение привода.
Какое количество полюсов должно быть у синхронного генератора имеющего частоту тока 50 Гц?
Ротор генератора, приводимого в движение водяной турбиной, делает 75 об/мин. Определить число полюсов генератора, если частота его тока 50 гц: Следовательно, генератор имеет 80 полюсов.
Как узнать мощность электродвигателя мультиметром?
Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Как определить частоту вращения магнитного поля?
Как известно, частота тока в цепи ротора асинхронного двигателя зависит от скольжения, т. е. определяется разностью частот вращения ротора и поля статора. Указанное свойство позволяет использовать двигатель в качестве преобразователя частоты (рис.
Интересные материалы:
Можно ли обрезать герань на зиму?
Можно ли обрезать герань в ноябре?
Можно ли обрезать гибискус на зиму?
Можно ли обрезать Глоксинию?
Можно ли обрезать гнилые корни у цветущей орхидеи?
Можно ли обрезать гортензии?
Можно ли обрезать гортензию Метельчатую осенью?
Можно ли обрезать гортензию осенью?
Можно ли обрезать гортензию под корень?
Можно ли обрезать гортензию в августе?
Скорость вращения ротора асинхронного двигателя
Скорость вращения магнитного поля двигателя (синхронная скорость):
- n = 60f / p [об/мин]
Где:
- p – число пар полюсов двигателя;
- f – частота сети (50 Гц);
Скорость вращения двигателя онлайн калькулятор
Число пар полюсов двигателя:
Скорость вращения магнитного поля двигателя
:
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
Где:
- s – скольжение.
Поделиться в соц сетях:
Популярные сообщения из этого блога
Найти тангенс фи , если известен косинус фи
Калькулятор коэффициент мощности cos fi в tg fi Как найти тангенс фи, если известен косинус фи формула: tg φ = (√(1-cos²φ))/cos φ Калькулятор онлайн – косинус в тангенс cos φ: tg φ: Поделиться в соц сетях: Найти синус φ, если известен тангенс φ Найти косинус φ, если известен тангенс φ
Индекс Руфье калькулятор
Проба Руфье калькулятор онлайн. Первые упоминания теста относиться к 1950 году. Именно в это время мы находим первое упоминание доктора Диксона о “Использование сердечного индекса Руфье в медико-спортивном контроле”. Проба Руфье – представляет собой нагрузочный комплекс, предназначенный для оценки работоспособности сердца при физической нагрузке. Индекс Руфье для школьников и студентов. У испытуемого, находящегося в положении лежа на спине в течение 5 мин, определяют число пульсаций за 15 сек (P1); После чего в течение 45 сек испытуемый выполняет 30 приседаний. После окончания нагрузки испытуемый ложится, и у него вновь подсчитывается число пульсаций за первые 15 с (Р2); И в завершении за последние 15 сек первой минуты периода восстановления (Р3); Оценку работоспособности сердца производят по формуле: Индекс Руфье = (4(P1+P2+P3)-200)/10; Индекс Руфье для спортсменов Измеряют пульс в положении сидя (Р1); Спортсмен выполняет 30 глубоких приседаний в
Найти косинус фи (cos φ), через тангенс фи (tg φ)
tg фи=… чему равен cos фи? Как перевести тангенс в косинус формула: cos(a)=(+-)1/sqrt(1+(tg(a))^2) Косинус через тангенс, перевести tg в cos, калькулятор – онлайн tg φ: cos φ: ± Поделиться в соц сетях:
Синхронная скорость – вращение – ротор
Cтраница 1
Синхронная скорость вращения ротора соответствует частоте тока, питающего обмотку статора. Поэтому на любой полюс ротора действует всегда одно и то же окружное усилие ( без учета эксцентрицитета) независимо от положения полюсов ротора относительно полюсов статора.
[1]
Синхронная скорость вращения ротора Qrc, при которой возникает синхронный момент, определяется из равенства – ( coj ZrQrc) в1, откуда имеем Qrc 2a1 / Zr, рад / с.
[2]
При синхронной скорости вращения ротора По момент, развиваемый асинхронным двигателем, равен нулю. Поэтому двигатель не может нести никакой нагрузки при синхронной скорости, а может быть нагружен только при несинхронной скорости, что, кстати говоря, и определило само название асинхронного двигателя.
[3]
При синхронной скорости вращения ротора гистерезис-ный момент возникает в результате магнитного состояния материала ротора, аналогично тому, как возникает момент в синхронном двигателе с постоянными магнитами. Чем больше коэрцитивная сила Яс и остаточная индукция Вг0 ( рис. 3 – 1), тем больше гистерезисный момент.
[4]
В результате будет поддерживаться синхронная скорость вращения ротора, независимо от случайных изменений скорости в сторону ее увеличения или уменьшения. Это имеет место не только в режиме холостого хода, которому соответствуют диаграммы на рис. 13 – 11, но и при работе машины под нагрузкой.
[6]
Таким образом, из уравнений (42.5) и (42.9) следует, что синхронная скорость вращения ротора рассмотренных синхронных редук-торных двигателей обратно пропорциональна числу пазов ротора гг. Чем больше это число пазов, тем ниже синхронная скорость вращения ротора.
[7]
Электромагнитный вращающий момент Мэя будет все время направлен в одну сторону только при синхронной скорости вращения ротора.
[8]
У крановых электродвигателей число полюсов бывает 6, 8 и 10, что при частоте тока 50 гц соответствует синхронным скоростям вращения ротора 1000, 750 и 600 об / мин.
[9]
В результате этого нарушения появляется ток в статоре и генератор принимает на себя активную нагрузку, что восстанавливает нарушенное равновесие при прежней синхронной скорости вращения ротора.
[10]
В выпускающихся автоматических приборах типа ЭПП-09 и ЭМП-09 применяются синхронные двигатели СД-09М ( модернизированные) с питанием напряжением 220 в, имеющие явно выраженные полюса, синхронную скорость вращения ротора 3000 об / мин и пусковой момент 300 Г – см. Эти двигатели имеют ряд недостатков: большие габариты ( 122×92 мм без вала) и вес ( 2 3 кг), мощность, потребляемую двигателем ( около 80 в-а), значительное рассеиваемое магнитное поле, сравнительно высокую синхронную скорость ( 3000 об / мин), потребовавшую создания сложного редуктора, включающего червячную передачу, потери мощности и значительный износ зубчатой передачи.
[11]
Таким образом, из уравнений (42.5) и (42.9) следует, что синхронная скорость вращения ротора рассмотренных синхронных редук-торных двигателей обратно пропорциональна числу пазов ротора гг. Чем больше это число пазов, тем ниже синхронная скорость вращения ротора.
[12]
Из полученного соотношения следует, что все механические характеристики режима электродинамического торможения имеют общую точку, соответствующую нулевой скорости ротора, в то время как для двигательного режима общей точкой всех характеристик является синхронная скорость вращения ротора.
[13]
Вектор тока холостого хода / опережает на небольшой угол вектор потоко-сцепления liivi, так как для создания магнитного потока асинхронная машина в режиме генератора продолжает потреблять из сети намагничивающий ток, а при синхронной скорости вращения ротора требуется небольшая активная составляющая тока холостого хода для покрытия потерь в стали статора.
[15]
Страницы:
1
2
3
