Уточненная скорость
рабочего хода поршня со штоком определяется
по формуле (9):
uр.х=Qн×оц/F
(32)
![]()
uр.х.=0,0802∙1/0,00785=10,22
м/мин
Скорость холостого
хода определяется по формуле (33):
uх.х=![]() (33)
(33)
Скорость холостого
хода равна:
х.х=0,0802∙1/(0,00785-0,0019625)=13,62
м/мин
Время одного
двойного хода поршня без учета сжимаемости
жидкости рассчитывается по формуле
(34):

t=
(34)
где S – ход поршня
t – время реверса.
t=с![]() .При
.При
массе подвижных частей m=265кг, принимаем
с=0,056 с1,5м0.5.
t=0,056![]() =0,0564,883=0,273
=0,0564,883=0,273
с
Используя формулу
(37), получаем:
t=![]() =1,1
=1,1
с
5 Определение коэффициента полезного действия гидропривода
Коэффициент
полезного действия для данной схемы
определится по формуле (35):


г.п=
= (35)
где Qн
– подача
насоса при рн
Рп
– полезное усилие на штоке гидроцилиндра
н
– полный К.П.Д. насоса. н
=0мг
г
– гидравлический К.П.Д. насоса ( г=1)
0 –
объемный К.П.Д. насоса
м
– механический К.П.Д. насоса
=![]() (36)
(36)
=80,2/84=0,955
м=![]() (37)
(37)
м=0,77/0,88=0,875
н=10,955∙0,875=0,836
Используя формулу
(35), получаем:
г.п=2300010,22600000,836/4,211066080,2=0,582
(58,2 %)
6 Тепловой расчет гидропривода
Рабочая температура
масла в гидросистеме должна быть 50…550С.
Установившаяся
температура масла определяется по
формуле:
![]() ,
,
(38)
где tВ
= 20…250С
– температура воздуха в цехе,
К – коэффициент
теплоотдачи от бака к окружающему
воздуху, Вт/(м2·0С)
К=17,5 Вт/(м2·0С)
– при отсутствии местной интенсивной
циркуляции воздуха.
Nпот
– потеря мощности, определяется, как:
Nпот=рнQн(1-гп)/н
(39)
Nпот=4,2110680,2(1-0,582)/0,83660000=2,814
кВт
Расчетная площадь
гидробака F, определяется по формуле
(40):
![]() 2,189
2,189
м2
(40)
где α – коэффициент,
зависящий от отношения сторон гидробака:
α = 6,4 при отношении сторон бака от 1:1:1
до 1:2:3.
Используя формулу
(38), получаем:
tм=22+2814/(17,52,189)=95,45
0С
Используя
теплообменник Г44-24 (К=85 Вт/(м2·0С)),
получаем:
tм=22+2814/(852,189)=37,12
0С
Получившаяся
температура ниже допустимых 55 0С,
такая температура допускается.
7 Построение пьезометрической линии
На всасывающей
линии существует только потери напора
на прямолинейном участке. Они очень
малы, значит
![]()
В напорной линии
потери напора:
-
Для насоса:
 =497,92
=497,92
м
-
Для распределителя:
 =25,90
=25,90
м
-
Для предохранительного
клапана:
=19,04
м
-
Потери в
гидроцилиндре:
=368,88
м
В сливной линии
потери напора:
-
Для распределителя:
=19,51
м
-
Для гидроклапана
давления:
=46,01
м -
Для обратного
клапана:
=24,60
м -
Для фильтра:
=7,10
м
Во
всасывающей линии потери по длине и в
местных сопротивлениях составляют:

![]()
![]() =0,15
=0,15
м
В
напорной линии потери по длине и в
местных сопротивлениях составляют:

![]()
![]() =2,61
=2,61
м
В
сливной линии потери по длине и в местных
сопротивлениях составляют:

![]()
![]() =2,37
=2,37
м

Соседние файлы в папке Б5-А6
- #
- #
02.06.2015148.18 Кб16ehye u5.cdw
- #
02.06.20157.66 Кб15Ведомость 401.cdw
- #
- #
02.06.2015164.66 Кб17Втоорой лист по 401.cdw
- #
Нахождение скорости вращения двигателя постоянного тока при холостом ходе
Ученик
(161),
закрыт
2 года назад
Serg
Просветленный
(31049)
2 года назад
Проще посмотреть на табличке самого прибора)
Сейчас на всех приборах указывается мощность и скорость вращения. Хоть на перфораторе, хоть на стиральной машинке
Mycke
Просветленный
(22502)
2 года назад
electrikam.com/osnovnye-uravneniya-dvigatelya-postoyannogo-toka-dpt/#:~:text=где%3A%20ω%20%3D%202*π*f%20—,себя%20конструктивные%20особенности%20данного%20двигателя)
Содержание
- Большая Энциклопедия Нефти и Газа
- Скорость — холостой ход — двигатель
- 4 Определение скорости рабочего и холостого хода, времени двойного хода поршня со штоком цилиндра
- 5 Определение коэффициента полезного действия гидропривода
- 6 Тепловой расчет гидропривода
- 7 Построение пьезометрической линии
- УСТРАНЕНИЕ НЕПОЛАДОК ХОЛОСТОГО ХОДА
- Исправление неполадок с холостым ходом
- Симптом: двигатель на холостом ходу работает не стабильно если двигатель холодный. Когда двигатель холодный и вы убираете ногу с педали газа, двигатель работает очень грубо и может заглохнуть. При запуске прогретого двигателя он работает нормально. Или по крайней мере работает более плавно.
- Симптом: прогретый двигатель на холостом ходу работает не стабильно. Когда двигатель теплый или горячий и вы убираете ногу с педали газа, двигатель работает очень грубо и может заглохнуть. При запуске двигателя на высоких скоростях он работает нормально.
- Симптом: Автомобиль глохнет при остановке. Вы едете и все просто отлично … до тех пор, пока вы не отпустите педаль газа. Двигатель начинает трястись и может заглохнуть. Не очень хорошо, потому что вы потеряете усилитель руля когда двигатель заглохнет.
Большая Энциклопедия Нефти и Газа
Скорость — холостой ход — двигатель
Скорость холостого хода двигателя яо 700 об / мин. [1]
Из этого соотношения видно, что скорость холостого хода двигателя не зависит от сопротивления якоря, а является функцией приложенного напряжения и величины магнитного потока. [2]
Изменение первого слагаемого, представляющего собой скорость холостого хода двигателя , при изменении напряжения генератора вызывает перемещение механической характеристики вдоль оси ординат. При этом характеристики остаются параллельными, поскольку угол наклона, определяемый сопротивлением главной цепи генератора и двигателя ( — -) остается неизменным при постоянной величине потока возбуждения двигателя. [4]
Ло U ] k, — скорость холостого хода двигателя ; / м — L / Г ] — ток короткого замыкания системы. [5]
Электромеханическая постоянная времени тем больше, чем больше скорость холостого хода двигателя . Для улучшения динамических свойств индукционных сервомоторов их выполняют многополюсными — с двумя, тремя и четырьмя парами полюсов в каждой обм атке, за счет чего уменьшается скорость холостого хода, а следовательно, и электромеханическая постоянная времени двигателя. [7]
Мкз — момент короткого замыкания, развиваемый двигателем, 00 — скорость холостого хода двигателя , К — общий коэффициент усиления разомкнутой системы. [8]
Исходя из ( 1 — 22), можно видеть, что первый член выражения ( 1 — 20) представляет собой скорость холостого хода двигателя . [9]
В области малых напряжений С / у 10 — н 30 b при подмагничивании обмотки управления постоянным током 10 50 — — 60 ма скорость холостого хода двигателя уменьшается в 2 — 4 раза. Соответственно уменьшаются коэффициент передачи и постоянная времени двигателя, что улучшает устойчивость системы и увеличивает степень ее демпфирования. Это приводит к увеличению времени пробега шкалы также на 10 — 15 %, так как отработка скачкообразного входного сигнала, равного пределу шкалы, как правило, происходит при полной скорости двигателя. Если же в следящей системе реализуется оптимальный по быстродействию переходный процесс, то при оптимальном коэффициенте передачи редуктора уменьшение быстродействия будет еще меньше, в чем нетрудно убедиться, выполнив соответствующие расчеты по формулам гл. [10]
При пуске двигателя вхолостую в системе преобразователь — двигатель графики переходного процесса имеют вид, показанный на рис. 5.13 а, б для случаев линейно и экспоненциально изменяющейся скорости холостого хода двигателя . [12]
Поскольку требуется определить лишь отклонение регулируемой величины от заданного значения под действием скачкообразного изменения момента нагрузки от 0 до постоянной величины М, то за начало отсчета можно принять скорость холостого хода двигателя и рассматривать операторное уравнение с нулевыми начальными условиями. [13]
Кроме защиты выпрямителя и двигателя при пусках и перегрузках привода, узел токоограничения используется для компаундирования и стабилизации. В этих случаях обычно требуется поддерживать с высокой точностью лишь скорости холостого хода двигателей , а жесткость характеристик приходится уменьшать с помощью узла компаундирования. В рассматриваемой схеме для этого служит цепь жесткой линейной обратной связи по току, замыкающаяся на обмотку w суммирующего магнитного усилителя. [14]
Источник
4 Определение скорости рабочего и холостого хода, времени двойного хода поршня со штоком цилиндра
Уточненная скорость рабочего хода поршня со штоком определяется по формуле (9):

Скорость холостого хода определяется по формуле (33):
uх.х= (33)
(33)
Скорость холостого хода равна:
Время одного двойного хода поршня без учета сжимаемости жидкости рассчитывается по формуле (34):
где S – ход поршня
t – время реверса. t=с .При массе подвижных частей m=265кг, принимаем с=0,056 с 1,5 м 0.5 .
.При массе подвижных частей m=265кг, принимаем с=0,056 с 1,5 м 0.5 .
t=0,056 =0,0564,883=0,273 с
=0,0564,883=0,273 с
Используя формулу (37), получаем:
t= =1,1 с
=1,1 с
5 Определение коэффициента полезного действия гидропривода
Коэффициент полезного действия для данной схемы определится по формуле (35):
где Qн – подача насоса при рн
Рп – полезное усилие на штоке гидроцилиндра
г – гидравлический К.П.Д. насоса ( г=1)
– объемный К.П.Д. насоса
м – механический К.П.Д. насоса
= (36)
(36)
м= (37)
(37)
Используя формулу (35), получаем:
г.п=2300010,22600000,836/4,2110 6 6080,2=0,582 (58,2 %)
6 Тепловой расчет гидропривода
Рабочая температура масла в гидросистеме должна быть 50…55 0 С.
Установившаяся температура масла определяется по формуле:
 , (38)
, (38)
где tВ = 20…25 0 С – температура воздуха в цехе,
К – коэффициент теплоотдачи от бака к окружающему воздуху, Вт/(м 2 · 0 С)
К=17,5 Вт/(м 2 · 0 С) – при отсутствии местной интенсивной циркуляции воздуха.
Nпот – потеря мощности, определяется, как:
Nпот=4,2110 6 80,2(1-0,582)/0,83660000=2,814 кВт
Расчетная площадь гидробака F, определяется по формуле (40):
 2,189 м 2 (40)
2,189 м 2 (40)
где α – коэффициент, зависящий от отношения сторон гидробака: α = 6,4 при отношении сторон бака от 1:1:1 до 1:2:3.
Используя формулу (38), получаем:
Используя теплообменник Г44-24 (К=85 Вт/(м 2 · 0 С)), получаем:
Получившаяся температура ниже допустимых 55 0 С, такая температура допускается.
7 Построение пьезометрической линии
На всасывающей линии существует только потери напора на прямолинейном участке. Они очень малы, значит 
В напорной линии потери напора:
Для насоса:  =497,92 м
=497,92 м
Для распределителя: 
 =25,90 м
=25,90 м
Для предохранительного клапана:  =19,04 м
=19,04 м
Потери в гидроцилиндре:  =368,88 м
=368,88 м
В сливной линии потери напора:
Для распределителя:  =19,51 м
=19,51 м
Для гидроклапана давления:  =46,01 м
=46,01 м
Для обратного клапана:  =24,60 м
=24,60 м
Для фильтра:  =7,10 м
=7,10 м
Во всасывающей линии потери по длине и в местных сопротивлениях составляют:

 =0,15 м
=0,15 м
В напорной линии потери по длине и в местных сопротивлениях составляют:

 =2,61 м
=2,61 м
В сливной линии потери по длине и в местных сопротивлениях составляют:

 =2,37 м
=2,37 м
Источник
УСТРАНЕНИЕ НЕПОЛАДОК ХОЛОСТОГО ХОДА
Исправление неполадок с холостым ходом
Во многих отношениях холостой ход является хорошим показателем здоровья вашего двигателя. Если что-то идет не так под капотом, есть шанс, это будет влиять на скорость и качество холостого хода вашего автомобиля. Проблемы с холостым ходом, такие как низкие или повышенные обороты холостого хода, плавающий холостой ход — это симптомы, которые должны быть исследованы и отремонтированы. Следующие симптомы и связанные с ними проблемы должны действовать в качестве руководства в помощи и устранении.
Симптом: двигатель на холостом ходу работает не стабильно если двигатель холодный. Когда двигатель холодный и вы убираете ногу с педали газа, двигатель работает очень грубо и может заглохнуть. При запуске прогретого двигателя он работает нормально. Или по крайней мере работает более плавно.
— Если у вас есть карбюратор, у вас может быть неисправный ускорительный насос или цепи питания.
Исправление: Замените ускорительный насос или заменить карбюратор.
— Также может быть утечка вакуума.
Исправление: Проверить и заменить вакуумные линии, как требуется.
— Могут быть проблемы зажигания.
Исправление: Проверить и заменить крышку распределителя, ротора, высоковольтные провода и свечи зажигания.
— Опережение зажигания может быть установлено неправильно.
Исправление: установить опережение зажигания.
— Может быть ошибка в компьютерной системе управления двигателем.
Исправление: Проверка системы управления двигателем с помощью диагностического прибора. Испытательные схемы и ремонт или замена компонентов по мере необходимости.
— Клапан рециркуляции выхлопных газов может быть неисправен.
Исправление: Заменить клапан рециркуляции ОГ.
— Двигатель может иметь механические проблемы.
Исправление: Проверьте компрессию, чтобы определить состояние двигателя.
— Скорость холостого хода неправильна.
Исправление: Установите скорость холостого хода по спецификации.
— Топливные форсунки могут быть грязными.
Исправлено: Очистите или замените топливные форсунки.
Симптом: прогретый двигатель на холостом ходу работает не стабильно. Когда двигатель теплый или горячий и вы убираете ногу с педали газа, двигатель работает очень грубо и может заглохнуть. При запуске двигателя на высоких скоростях он работает нормально.
— Если у вас есть карбюратор, у вас может быть неисправный ускорительный насос или цепи питания.
Исправление: Замените ускорительный насос или заменить карбюратор.
— Также может быть утечка вакуума.
Исправление: Проверить и заменить вакуумные линии, как требуется.
— Регулятор давления топлива может работать на слишком низком давлении.
Исправлено: Проверьте давление топлива манометром. Заменить регулятор давления топлива.
— Скорость холостого хода неправильна.
Исправление: Установите скорость холостого хода по спецификации.
— Могут быть проблемы зажигания.
Исправление: Проверить и заменить крышку распределителя, ротора, высоковольтные провода и свечи зажигания.
— Может быть ошибка в компьютерной системе управления двигателем.
Исправление: Проверка системы управления двигателем с помощью диагностического прибора. Испытательные схемы и ремонт или замена компонентов по мере необходимости.
— Клапан рециркуляции выхлопных газов может быть неисправен.
Исправление: Заменить клапан рециркуляции ОГ.
— Двигатель может иметь механические проблемы.
Исправление: Проверьте компрессию, чтобы определить состояние двигателя.
— Топливные форсунки могут быть грязными.
Исправлено: Очистите или замените топливные форсунки.
Симптом: Автомобиль глохнет при остановке. Вы едете и все просто отлично … до тех пор, пока вы не отпустите педаль газа. Двигатель начинает трястись и может заглохнуть. Не очень хорошо, потому что вы потеряете усилитель руля когда двигатель заглохнет.
— Может быть серьезная утечка вакуума.
Исправлено: Проверить и заменить вакуумные линии, как требуется.
— Также может быть ошибка в компьютерной системе управления двигателем.
Исправлено: Проверка системы управления двигателем с помощью диагностического прибора
— Неиспрвен РХХ.
Исправлено: Отремонтировать или заменить при необходимости.
Это лишь некоторые из множества неполадок холостого хода подходящие ко всем бензиновым двигателям. А по определенной марке нужно читать мануалы.
Источник
Содержание
- Основные уравнения двигателя постоянного тока (ДПТ)
- Противо ЭДС двигателя Eя
- Ток якоря Iя
- Частота вращения якоря
- Электромагнитная мощность двигателя
- Электромагнитный момент
- Характеристики двигателей постоянного тока
- Механические характеристики двигателей постоянного тока
- Электродвигателей постоянного тока
Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М момент холостого хода;
Источник
Характеристики двигателей постоянного тока
Классификация и основные уравнения двигателей постоянного тока
Двигатели постоянного тока находят широкое применение в тех случаях, когда по условиям работы исполнительного механизма требуется широкое изменение частоты вращения, и при этом часто имеют преимущества по сравнению с двигателями переменного тока. Используются они в металлургической промышленности, станкостроении, системах автоматического регулирования, широко применяются на электрическом транспорте, в авиации и автомобилестроении. Двигатели постоянного тока могут иметь мощность в пределах от нескольких ватт до нескольких тысяч киловатт.
Как и генераторы, двигатели постоянного тока классифицируют по способу включения обмотки возбуждения. Различают двигатели независимого, параллельного, последовательного и смешанного возбуждения. Электрические схемы этих двигателей аналогичны схемам соответствующих генераторов. Отличие заключается в том, что ток якоря Iа в двигателях независимого и последовательного возбуждения равен сетевому току I, а в двигателях параллельного и смешанного возбуждения из сети потребляется и ток возбуждения Iв.
Рассмотрим основные уравнения двигателей постоянного тока.
1. Уравнение равновесия напряжений для цепи якоря в режиме двигателя:
Упрощение уравнения производится так же, как для генераторов:
2. Уравнение баланса токов для двигателей параллельного и смешанного возбуждения:
3. Уравнение движения:
где J — момент инерции якоря двигателя и вращающихся частей приводного механизма; М— электромагнитный момент, развиваемый двигателем, Мс — момент сопротивления, равный сумме моментов приводимого механизма М2 и тормозного момента Mo, обусловленного потерями внутри самого двигателя.
Уравнение частоты вращения двигателя можно получить если в(24.2) подставить вместо ЭДС его значение
Разрешив полученное уравнение относительно n получим
Характеристики двигателей постоянного тока
Основными характеристиками, по которым оценивают рабочие свойства двигателей, являются:
скоростная — зависимость частоты вращения от тока якоря,
моментная — зависимость электромагнитного момента от тока якоря,
механическая— зависимость частоты вращения от электромагнитного момента, п =f(M).
Двигатели независимого и параллельного возбуждения.Все характеристики этих двигателей получают при постоянных значениях напряжения сети и тока возбуждения, обычно соответствующих своим номинальным значениям: U= U ном; IB = Iв.ном.
1. Скоростная характеристика n=f(Ia). Выражением, определяющим эту характеристику, является уравнение (24.5). Как следует из этого уравнения, если магнитная цепь двигателя ненасыщена и магнитный поток Ф = const, то зависимость п(Iа) линейная и с ростом тока якоря частота вращения уменьшается. Этому случаю соответствует сплошная линия на рис. 24.1.
Поток якоря вызывает уменьшение потока возбуждения ( ), то выражение для частоты вращения будет иметь вид

Рис.24.1. Скоростная(механическая)характеристика двигателя независимого возбуждения
где Ф — магнитный поток, соответствующий номинальному току возбуждения 1В ном при холостом ходе двигателя; — уменьшение магнитного потока из-за размагничивающего действия реакции якоря.
Как следует из формулы (24.5), при возрастании тока якоря в результате падения напряжения частота вращения п снижается, а при уменьшении потока Ф — увеличивается. Это показано на рис. 24.1 штриховой линией.
Если относительное значение суммарного сопротивления цепи якоря больше относительного значения уменьшения потока , то частота вращения с ростом тока якоря будет уменьшаться. Если же 
Двигатели последовательного и смешанного возбуждения.Особенностью двигателя последовательного возбуждения является то, что его ток возбуждения равен току якоря (IВ = Iа), и поэтому для вывода выражений, определяющих вид его характеристик, предварительно необходимо определить связь между магнитным потоком Ф и током якоря Iа = Iв. Зависимость Ф =f(Ia) называется магнитной характеристикой. Идеальная магнитная характеристика (без учета размагничивающего действия реакции якоря) показана рис. 24.3 сплошной линией, а реальная (с учетом реакции якоря) — штриховой.

Рис. 24.3. Магнитная характеристика двигателя последовательного вобуждения
Все характеристики двигателя последовательного возбуждения получают при постоянном напряжении питания (обычно при U= UHM).
1. Скоростная характеристика п = f(Ia). Подставив в уравнение (24.5) выражение для потока в зависимости от тока якоря в соответствии с магнитной характеристикой, получим формулу скоростной характеристики двигателя. Для упрощения анализа пренебрежем насыщением магнитной цепи и будем считать магнитную характеристику линейной:

Рис.24,4. Скоростная характеристика двигателя последовательного возбуждения

Рис.24.5. Моментная характеристика двигателя последовательного возбуждения
Тогда, подставив выражение (24.9) в уравнение (24.5), получим
Из уравнения (24.10) следует, что скоростная характеристика имеет гиперболический вид; на рис.24.4 она изображена сплошной линией. Особенностью скоростной характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (24.10)следует также, что ось ординат (ось п) является для этой характеристики асимптотой.
Реальная скоростная характеристика с учетом размагничивающего действия реакции якоря будет отклоняться от гиперболической кривой вверх, как показано штриховой линией на рис. 24.4.
2. Моментная характеристика M-f(Ia). Подставив в уравнение для момента выражение (24.9), получим формулу для электромагнитного момента двигателя с последовательным возбуждением:
Из выражения следует, что электромагнитный момент двигателя последовательного возбуждения пропорционален квадрату тока якоря, т.е. моментная характеристика имеет параболический вид; на рис.24.5 она изображена сплошной линией. С учетом размагничивающего действия реакции якоря момент в области больших токов будет меньше момента, получаемого по выражению (24.11) (штриховая линия на рис. 24.5).
3.Механическая характеристика п =f(М). Из выражения (24.11) ток якоря
Тогда, подставив (24.12) в (24.10), получим аналитическое выражение для механической характеристики:
Из выражения (24.13) следует, что механическая характеристика двигателя последовательного возбуждения при U= const так же, как и его скоростная характеристика, имеет практически гиперболический вид (рис.24.6).

Рис. 24.6. Механическая характеристика двигателя последовательного возбуждения
Особенностью механической характеристики двигателя последовательного возбуждения является ее большая крутизна в области малых значений тока якоря. Из уравнения (24.13) следует также, что ось ординат (ось п) является асимптотой для этой характеристики.
При частота вращения двигателя стремится к бесконечности. В этом случае говорят, что двигатель идет вразнос. Чрезмерное повышение частоты вращения опасно для механической прочности якоря, так как из-за больших значений центробежных сил, возникающих в этом случае, может нарушиться целость бандажей, удерживающих обмотку якоря, и произойти разрушение коллектора. Следовательно, нельзя допускать работу двигателя последовательного возбуждения при холостом ходе и малых нагрузках, т. е. нагрузка не должна быть меньше 25. 31 % номинальной. Лишь для двигателей малой мощности (десятки ватт) допустима работа при холостом ходе, так как их собственный момент потерь М достаточно велик.
Вследствие сильной зависимости частоты вращения от нагрузки механические и скоростные характеристики двигателей последовательного возбуждения называют мягкими.
Характеристики двигателей смешанного возбуждения занимают промежуточное положение между соответствующими характеристиками двигателей параллельного и последовательного возбуждения. При слабой последовательной обмотке они будут приближаться к характеристикам двигателя параллельного возбуждения, а при сильной — к характеристикам двигателя последовательного возбуждения.
Сравнение характеристик двигателей.Двигатели параллельного (независимого) возбуждения имеют жесткую механическую характеристику и поэтому применяются в установках, где необходимо поддерживать постоянную частоту вращения при изменении момента нагрузки, например, в станках, прокатных станах, вентиляторах и т.д. Они также широко применяются при необходимости регулирования частоты вращения в широком диапазоне. В этом случае подводимое к якорю двигателя напряжение изменяется в широких пределах, в то время как напряжение возбуждения остается неизменным.
В двигателях последовательного возбуждения электромагнитный момент имеет квадратичную зависимость от тока якоря, поэтому их применение предпочтительно, когда требуются большие пусковые моменты и наблюдаются частые перегрузки по моменту. Связано это с тем, что при одних и тех же колебаниях момента сопротивления ток и потребляемая мощность у двигателей последовательного возбуждения изменяются существенно меньше, чем у двигателей параллельного возбуждения. Двигатели последовательного возбуждения находят широкое применение на электрическом транспорте и в подъемных устройствах.
Источник
Механические характеристики двигателей постоянного тока
Аналитическое выражение механической характеристики двигателя постоянного тока можно получить из уравнения равновесия напряжений якорной цепи (при установившемся режиме)

где U — напряжение на зажимах двигателя, В; 1Я — ток в цепи якоря, A; Rя — сопротивление цепи якоря, Ом; Ф — магнитный поток двигателя, Вб; ω — угловая скорость якоря, рад/с; сд — коэффициент, зависящий от конструктивных данных двигателя. Решив уравнение (3.1) относительно угловой скорости, получим уравнение скоростной характеристики двигателя

Электромагнитный вращающий момент двигателя (Н • м) пропорционален магнитному потоку и току якоря:

Из уравнения (3.3) ток якоря

Подставив в уравнение (3.2) значение тока, выраженное уравнением (3.4), получим уравнение механической характеристики двигателей постоянного тока независимо от способа возбуждения

Рассмотрим механические характеристики двигателей постоянного тока в зависимости от способа возбуждения.
Двигатели постоянного тока параллельного возбуждения. Схема включения двигателя постоянного тока параллельного возбуждения приведена на рис. 3.1, а. Обмотка возбуждения ОВ может быть подключена к той же сети, что и якорь, или к отдельному источнику тока (независимое возбуждение). В том и другом случае ток возбуждения не зависит от процессов, происходящих в якоре двигателя и при постоянном напряжении сети магнитный поток можно считать постоянным Ф = const. Обозначив сдФ=kд и подставив его в уравнение (3.5), получим уравнение механической характеристики двигателя постоянного тока параллельного возбуждения


При М=0 угловая скорость якоря
называется скоростью идеального холостого хода.

Второй член уравнения (3.6) определяет изменение угловой скорости двигателя при изменении момента

Величина Δω зависит не только от момента, но и от сопротивления цепи якоря. С увеличением Rя величина Δω увеличивается. С учетом уравнений (3.7) и (3.8) уравнение (3.6) можно записать в виде
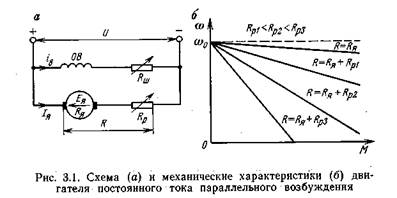
Из уравнений (3.6) и (3-.9) видно, что механическая характеристика двигателя параллельного возбуждения является прямой линией, тангенс угла наклона которой определяется величиной Rя/kд 2
На рис. 3.1,6 приведены естественная и искусственные механические характеристики, полученные введением в цепь якоря реостата. Такие искусственные характеристики используются при пуске и торможении двигателя.
Двигатели постоянного тока последовательного возбуждения. Схема включения двигателя последовательного возбуждения приведена на рис. 3.2, а. Обмотка возбуждения ОВ включена последовательно с якорем и по ней протекает ток якоря. Следовательно, магнитный поток двигателя является функцией тока якоря. Эта зависимость выражается графически в виде кривой намагничивания, которая является нелинейной функцией и не имеет аналитического выражения. Поэтому нельзя получить аналитическую зависимость для механической характеристики.
Характерной особенностью двигателей последовательного возбуждения является то, что изменение магнитного потока с изменением тока якоря оказывает большое влияние на скорость двигателя. Это хорошо видно из уравнения скоростной характеристики

которое показывает, что с изменением магнитного потока скорость двигателя может изменяться в широких пределах.

Если для упрощения предположить, что магнитная цепь двигателя не насыщена и поток пропорционален току
то момент двигателя

Подставив в уравнение скоростной характеристики значение Ф = Сф/я, получим

где R — внутреннее сопротивление цепи якоря, равное сумме сопротивлений обмоток якоря и возбуждения (Rя + rя).
Заменив в уравнении ток якоря его выражением из (3.10), получим уравнение механической характеристики

Уравнение (3.12) представляет собой уравнение кривой, для которой ось ординат является асимптотой. Подобная характеристика представлена на рис. 3.2,6. Уравнение (3.12) дает лишь общее представление о механической характеристике двигателя. При расчетах им пользоваться нельзя, так как аналитически учесть намагничивание стали невозможно. Как видно на рис. 3.2,6, механическая характеристика двигателя последовательного возбуждения — мягкая. При уменьшении нагрузки угловая скорость резко возрастает, а при М = 0 она стремится к бесконечности. В реальных двигателях ток при холостом ходе не может быть равен нулю вследствие потерь в стали и механических потерь, но угловая скорость может достигнуть опасных по условиям механической прочности значений, равных (5÷6)ωном. Поэтому холостой ход для двигателей последовательного возбуждения недопустим.
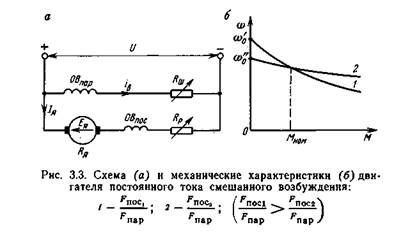

Двигатели постоянного тока смешанного возбуждения. Двигатели смешанного возбуждения имеют две обмотки возбуждения (рис. 3.3). Магнитный поток двигателя определяется суммой потоков параллельной ОВпар и последовательной ОВпос обмоток:
Вследствие нелинейной зависимости магнитного потока от тока якоря аналитическое выражение механической характеристики, так же как и для двигателя последовательного возбуждения, получить нельзя.
В зависимости от соотношения магнитных потоков обмоток возбуждения механические характеристики имеют различную жесткость. Чем больше доля магнитного потока последовательной обмотки, тем мягче характеристика. На рис. 3.3 приведены две естественные характеристики с различным соотношением магнитных потоков обмоток возбуждения. Обмотка параллельного возбуждения создает поток Фпар независимый от тока якоря, поэтому двигатель может работать вхолостую со скоростью
Источник
Электродвигателей постоянного тока
Электродвигатели постоянного тока могут иметь независимое, параллельное, последовательное или смешанное возбуждение (рис. 6.1).

Рис. 6.1. Схемы электродвигателей постоянного тока независимого (а),
параллельного (б), последовательного (в) и смешанного (г) возбуждения
(верхняя часть схемы «в» принадлежит схеме «а»)
В электродвигателе параллельного возбуждения обмотка возбуждения присоединяется параллельно к зажимам якоря. Но ток, протекающий по этой обмотке, в отличие от тока якоря не зависит от нагрузки и определяется приложенным к якорю напряжением и общим сопротивлением цепи возбуждения. По этой причине электродвигатель параллельного возбуждения называют также электродвигателем с независимым возбуждением.
Вращающий момент М двигателя постоянного тока и его ЭДС Е определяются по формулам
М = к Ф Iя; Е = кФω,
где к – конструктивный коэффициент двигателя;
Ф – магнитный поток, Вб;
Iя – ток якоря, А.
ω – угловая скорость, рад/с.
Уравнения электромеханической ω = ƒ (Iя) и механической ω = ƒ (М) характеристик имеют вид
ω = U/(кФ) – (Rя + Rр) / (к Ф) Iя;
ω = U/(кФ) – (Rя + Rр) / (к 2 Ф 2 ) М.
Угловая скорость идеального холостого хода (при Iя = 0 или М = 0)
На рис. 6.2 представлены механические характеристики двигателя постоянного тока с независимым возбуждением (ДПТ НВ) во всех режимах работы. Характерными точками характеристик в двигательном режиме являются: точка идеального холостого хода (ω, М = 0); точка номинального режима (ωн, Мн); точка короткого замыкания (ω = 0, М = Мк).
Жесткость механической характеристики определяется потоком возбуждения и сопротивлением якорной цепи:
β = dM/dω = — к 2 Ф 2 / (Rя + Rр) = — Мк / ω.

Рис. 6.2. Совмещенные механические характеристики двигателя постоянного тока с независимым возбуждением
Наибольшее значение модуля жесткости соответствует естественной механической характеристике, так как ток возбуждения равен номинальному и регулировочное сопротивление Rр = 0. По мере увеличения сопротивления реостата Rр наклон механической характеристики возрастает, а угловая скорость снижается. При заданном значении сопротивления Rр и номинальном моменте Мн угловая скорость двигателя
Для расчета механических характеристик необходимо знать сопротивление якоря двигателя Rя, которое задается в каталогах. При отсутствии заводских данных величину Rя находят ориентировочно по формуле
Так как механические характеристики ДПТ НВ прямолинейны, для их построения достаточно иметь две точки:
1) ω = ω и М = 0,
Для ДПТ НВ возможны следующие три режима электрического торможения.
1. Рекуперативное торможение, которое происходит, когда скорость двигателя выше скорости идеального холостого хода. Оно является наиболее экономичным, поскольку энергия торможения передается в электрическую сеть. Механические характеристики в этом режиме являются продолжением соответствующих характеристик двигательного режима во II квадранте. Схема двигателя при рекуперативном торможении не изменяется.
2. Динамическое торможение. Якорь двигателя отключается от сети и замыкается на сопротивление. При этом механическая энергия движущихся частей (механизма и якоря двигателя) преобразуется в электрическую, которая теряется в виде тепловой энергии в сопротивлениях якорной цепи. Механические характеристики в данном режиме торможения проходят через начало координат (на рис. 6.2 – линии с тремя засечками).
3. Торможение противовключением осуществляется двумя способами:
1) введением большого сопротивления в цепь якоря. При этом вращающий момент двигателя становится меньше, чем статический момент нагрузки Мс. Двигатель останавливается (в точке А), а затем под действием момента Мс начинает вращаться в другом направлении, развивая тормозной момент; в точке Б наступает установившийся режим. Механические характеристики являются продолжением соответствующих характеристик двигательного режима (на рис. 6.2 – линии с четырьмя засечками);
2) торможение переключением полярности обмотки якоря по ходу. Двигатель, работающий в точке 1, после переключения перейдет на реостатную характеристику в точку 2. По линии 2–3 происходит торможение (линия с пятью засечками). В точке 3 двигатель останавливается и его следует отключить от сети, чтобы избежать перехода в двигательный режим с вращением в обратном направлении.
В двигателе постоянного тока с последовательным возбужде-нием ток якоря одновременно является и током возбуждения. Магнитный поток возбуждения растет с увеличением нагрузки, вследствие чего угловая скорость снижается согласно уравнению (6.1) и механическая характеристика двигателя будет мягкой (рис. 6.3). Благодаря этому ДПТ НВ сравнительно легко и плавно преодолевает перегрузки и имеет высокий пусковой момент. Данные свойства двигателя позволяют широко применять его в приводе транспортных механизмов. Механические характеристики двигателя значительно смягчаются при введении в цепь якоря реостата (рис. 6.3, линии с одной засечкой).

Рис. 6.3. Механические характеристики двигателя постоянного тока
с последовательным возбуждением
У ДПТ ПВ нельзя осуществить режим рекуперативного торможения, поскольку в нем отсутствует скорость идеального холостого хода.
Динамическое торможение может осуществляться по схеме с самовозбуждением и с независимым возбуждением. В первом случае якорь и обмотка возбуждения отключаются от сети и замыкаются на реостат. Чтобы избежать размагничивания машины, необходимо переключить обмотку возбуждения (или якорь) таким образом, чтобы направление тока в обмотке возбуждения не изменилось. В этом случае машина самовозбуждается при данном сопротивлении цепи якоря лишь при определенном значении угловой скорости; возбудив-шись, она создает тормозной момент. Механические характеристики нелинейны (на рис. 6.3 – кривые с четырьмя засечками).
Механические характеристики двигателя в режиме динамического торможения с независимым возбуждением аналогичны соответствующим характеристикам двигателя с независимым возбуждением (на рис. 6.3 – линии с двумя засечками). Такой способ торможения нашел широкое применение, а первый способ используют редко, в основном как аварийный, например, при исчезновении напря-жения сети.
Торможение противовключением осуществляется, как у ДПТ НВ, двумя способами:
1) включением в цепь якоря большого сопротивления;
2) изменением полярности обмотки якоря, оставив направление тока в обмотке возбуждения без изменения.
При первом способе механическая характеристика будет продолжением характеристики, соответствующей двигательному режиму (на рис. 6.3 – линия с тремя засечками). При втором способе торможение осуществляется по линии 1–2–3.
Регулирование скорости электроприводов постоянного тока. Скорость ДПТ НВ можно регулировать:
1) путем изменения сопротивления в цепи якоря;
2) изменением потока возбуждения;
3) изменением напряжения, подводимого к якорю.
Регулирование по первому способу имеет существенно недостатки:
– уменьшается жесткость механических характеристик при снижении угловой скорости, а потери мощности в главной цепи воз-растают;
– диапазон регулирования ограничен, особенно при малых нагрузках;
– невелики плавность и точность регулирования.
По этим причинам такой способ регулирования в приводе постоянного тока используется редко.
По второму способу можно регулировать магнитный поток толь-ко в сторону уменьшения (так как в номинальном режиме магнитная цепь двигателя насыщена), что соответствует увеличению скорости выше номинальной. Возможный диапазон регулирования скорости при этом не превышает 2 для двигателя нормального исполнения. Верхний предел скорости ограничивается механической прочностью элементов якоря двигателя – бандажей обмотки якоря, коллектора.
Основным способом регулирования скорости ДПТ НВ является способ, основанный на изменении подводимого к якорю напряжения, которое осуществляется с помощью специального регулируемого преобразователя. В качестве индивидуальных источников питания используют в основном тиристорные преобразователи. Жесткость механических характеристик привода по системе «преобразователь – ДПТ НВ» практически постоянна. Механические характеристики представляют собой семейство параллельных друг другу прямых. Диапазон, плавность, точность регулирования здесь выше, чем при других способах регулирования. Поэтому данная система привода применяется для механизмов, требующих глубокого и плав-ного регулирования скорости.
Расчет добавочных резисторов в цепи якоря ДПТ НВ. Если известна естественная электромеханическая или механическая характеристика 1 двигателя (рис. 6.4) и его паспортные данные, то расчет сопротивления Rд, при включении которого в цепь якоря желаемая искусственная характеристика 2 пройдет через точку А с заданными координатами ωи, Iи или ωи, Ми, можно выполнить следующими наиболее распространенными методами.

Рис. 6.4. Характеристики ДПТ НВ для расчета величины
Метод пропорций. Запишем отношение перепадов скорости при токе Iи или моменте Ми на естественной Δωе и желаемой искусственной Δωи характеристиках:
Тогда искомая величина
Метод отрезков не требует знания значения собственного сопротивления двигателя Rя (более того, его значение можно определить по известной естественной характеристике).
Запишем выражение для скорости двигателя на заданной искусственной характеристике (см. рис. 6.4) при номинальных токе Iн, моменте Мн, магнитном потоке Фн и напряжении Uн:
Здесь Rн = Uн / Iн – так называемое номинальное сопротивление, являющееся базовой величиной при расчетах, Ом.
отражает важное свойство ДПТ НВ: относительный перепад скорости δ = Δω / ω равен относительному активному сопротивлению цепи якоря R / Rн.
Обозначим на рис. 6.4 характерные точки а, b, с, d и отметим, что ω – ωи = Δω = ас, ω = аd. Тогда R = Rн Δω / ω = Rн ас/ аd; Rд = Rн bс / аd; Rя = Rн аb / аd.
Таким образом, для нахождения Rд необходимо сначала по характеристикам определить длины отрезков bс и аd при номинальном токе или моменте и рассчитать номинальное сопротивление Rн = Uн / Iн.
Расчет добавочных резисторов можно выполнить также по следующим формулам для заданного допустимого тока Iдоп, который определяется величиной допустимого момента Мдоп или условиями пуска, реверса и торможения.
Сопротивление резистора Rд1 при пуске (Е = 0)
Сопротивление резистора Rд2 при динамическом торможении
Rд2 = (Е / Iдоп) – Rя ≈ (U / Iдоп) – Rя).
Сопротивление резистора Rд3 при реверсе или торможении противовключением
Rд3 = ((U + Е) / Iдоп) – Rя ≈ (2U / Iдоп) – Rя.
Пример. ДПТ НВ типа ПБСТ-53 имеет следующие паспортные данные: Рн = 4,8 кВт; nн = 1500 об/мин; Uн = 220 В; Iн = 24,2 А; Rя = 0,38 Ом; Iв.н = 0,8 А. Требуется определить:
1) сопротивление резистора, включение которого в цепь якоря двигателя обеспечит прохождение искусственной механической характеристики через точку с координатами ωи = 90 рад/с, Мн = 25 Нм;
2) сопротивления резисторов, включение которых ограничит ток при пуске и торможении противовключением до уровня Iдоп = 3 Iн.
Источник
Угловую скорость идеального холостого хода со о и коэффициент крутизны статической характеристики получим из уравнения (5.4) в виде [c.29]
Статическая характеристика гидропривода может быть получена на основании уравнений (2.36) в форме (2.21), причем входным параметром является угловая координата 7, т. е. и = -у. Скорость идеального холостого хода (Оо(и) и коэффициент крутизны статической характеристики v(u) определяются по формулам [c.31]
Угловую скорость идеального холостого хода а>о(и) и коэффициент крутизны статической характеристики v(u) при и х получим в виде [c.32]
Здесь-Од, Од — угловая скорость электродвигателя и угловая скорость идеального холостого хода — крутизна статической [c.134]
В частях характеристик, охватывающих скорости, большие скоростей идеального холостого хода (квадрант II, фиг. 19), двигатель переходит в режим генератора, отдавая энергию питающему его агрегату. Послед- [c.12]
Генераторное торможение с возвратом (рекуперацией) энергии в сеть. Двигатель, вращаясь со скоростью. превышающей скорость идеального холостого хода, отдает в сеть энергию. получаемую им от механи 1ма (например, при спуске грузов), за вычетом потерь в самом двигателе. [c.410]
При проектировании системы обычно известны величины до и Мо. Далее, из анализа технологического процесса устанавливается зависимость т(х) Что касается остальных параметров, то выбор их может быть подчинен условиям оптимальности работы системы. К числу оптимизируемых величин относятся 1) безразмерная передаточная функция механизма у(х) 2) дискретные параметры системы момент инерции вала двигателя /ь скорость идеального холостого хода шо номинальная скорость Мн номинальный момент двигателя М передаточное число редуктора k отношение массы ведомого звена к моменту инерции ведущего звена р,. [c.89]
Для двигателя постоянного тока независимого возбуждения – это скорость идеального холостого хода, определяемая соотношением С пах/ Д гидропривода – скорость, развиваемая исполнительным органом при полном открытии каналов в распределителе, полном использовании давления питания и отсутствии силы сопротивления. Например, для привода с нерегулируемым насосом и дроссельным управлением / S (см. табл. 9.2.1). [c.554]
Угловая скорость идеального холостого хода при / = О [c.118]
Зависимость между скоростью и моментом электродвигателя определяется уравнением п = щ — АМ, как для электродвигателя независимого возбуждения [см. уравнение (127)]. Однако, поскольку скорость идеального холостого хода и [c.271]
Фо — скорость идеального холостого хода двигателя ke, k , fi — параметры электрической схемы [c.10]
Для нахождения координаты точки холостого хода необходимо определить скорость идеального холостого хода по формуле [c.179]
Из уравнения для механической характеристики (16) следует, что при изменении напряжения на якоре С/ пропорционально изменяется скорость идеального холостого хода сОо, а искусственные характеристики будут оставаться линейными, параллельными друг другу и естественной характеристике (рис. 2.2.12). [c.180]
Угловая скорость идеального холостого хода Шо и коэффициент крутизны статической характеристики V, а также коэффициент /С(о и К определяются по формулам [c.276]
Динамическая характеристика двигателя (1) в относительных координатах т—8 показана на рис. 4, где т Мд/уИк — относительный момент, 5=й)1/й)о — относительная скорость вращения ротора Л1 =тах Мд.ст — максимальный вращающий момент по статической характеристике (критический момент) шо — угловая скорость идеального холостого хода. Там же для сопоставления показана статическая характеристика двигателя (2). Из сопоставления динамической и статической характеристик по рис. 4 следует, что электромагнитные переходные процессы оказывают существенное влияние на динамику машинного агрегата. [c.320]
V — коэффициент крутизны статической характеристики шд — угловая скорость идеального холостого хода. [c.411]
Анализ выражений для экстремальных значений переходных функций относительной скорости выходного звена и момента сил упругости в соединении позволяет указать пути уменьшения динамических явлений при набросе нагрузки. В частности, для этого следует увеличивать момент инерции исполнительного звена J2, повышать демпфирование (т. е. увеличивать ipij), выбирать приводной двигатель с возможно меньшей постоянной времени и большей скоростью идеального холостого хода Оо- [c.74]
При исследовании динамических процессов в приводе обычно пренебрегают изменением скорости генератора с изменением нагрузки, т. е. полагают Шр onst. Для асинхронного приводного двигателя влияние изменения Шг незначительно п может быть учтено при необходимости па основе упрощенной динамической характеристики АД [20]. Заменяя в уравнении (2.17) на Е и учитывая выран ение (2.22) для Е , получим динамическую характеристику двигателя в системе Г — Д (2.19) или (2.20). Скорость идеального холостого хода а>о(и) и коэффициент крутизны статической характеристики v(u) определяются в рассматриваемом случае по формулам [c.22]
Ослабление магнитного потока и = onst Фд = var. Ослабление магнитного потока производится путем включения сопротивлений в цепь обмотки возбуждения двигателя. Нри этом скорость идеального холостого хода изменяется обратно пропорционально магнитному потоку. [c.513]
В соответствии с уравнением механической характеристики (16) уменьшение потока возбуждения Ф приводит, во-пер-вых, к увеличению скорости идеального холостого хода Шд во-вторых, момент короткого замыкания М з = С Фд/кз рн уменьшении магнитного потока Фд будет также сцнжаться, так как сила тока короткого замыкания 1 . = от [c.181]
Определим угловую скорость двигателя при опускании. Число полюсов у двигателя МТН 613-10 равно 10. Следовательно, число пар полюсов р равно 5. Синхронная угловая скорость (скорость идеального холостого хода) вала двигателя равна = = Inflp = 2-3,142-50/5 62,83 рад/с. По формуле (4,12) находим = 2со, – со = 2 – 62,83 – 59,69 = 65,97 рад/с. По формулам (4.11) вычисляем значения времени разгона механизма при подъеме и опускании различных грузов и заносим данные зР1ачегшя в табл. 12.2. Среднюю высоту подъема при работе крана в сборочном цехе принимаем (см. 4.1) равной Я р = 2 м. Скорость опускания груза равна = = 0)лв.оп -б/Имех = 65,97-0,63/341,92 0,12 м/с. По формулам (4.15) определяем значения времени установившегося движения при подъеме (/у,п д) и при опускании (t и заносим их в табл. 12.2. [c.251]
