Получи верный ответ на вопрос 🏆 «Подъемный кран равномерно поднимает груз массой 2 т. Мощность двигателя крана 7,4 кВт. Определить скорость подъема груза. …» по предмету 📕 Физика, используя встроенную систему поиска. Наша обширная база готовых ответов поможет тебе получить необходимые сведения!
Найти готовые ответы
Главная » Физика » Подъемный кран равномерно поднимает груз массой 2 т. Мощность двигателя крана 7,4 кВт. Определить скорость подъема груза.
Vг.факт
=

, м/мин
Vг.факт
=
= 24,74 ,
м/мин
Пдв
– частота вращения вала двигателя,
об/мин.;
Dрасч
– расчетный диаметр барабана, м ;
Uр.таб
– передаточное число редуктора;
ап
– кратность полиспаста
4.1
Определение расхождения заданной
скорости подъема груза с фактической:

Vr
=
 * 100%
* 100%
 Vr
Vr
=
 * 100% =1,04
* 100% =1,04
%

Расчет
технико-экономической модели
Исходные
данные. Определить
режим работы, производительность и
стоимость разработки 1 м3
грунта при работе бульдозера общего
назначения Cat
D7R.
Стоимость машино-смены

руб/м-см
при работе по челночной схеме.
Разрабатываемый
грунт-песок
со следующими физико-механическими
свойствами:
 т/м3;
т/м3;
 ;
;
K
= 0,08 МПа;
 ;
;
 ;
;
f
= 0,15;
 ;
;
 .
.
Дальность
транспортировки грунта
 = 75 м; уклон пути гружёного хода
= 75 м; уклон пути гружёного хода
i
= 0,1;
 = 0,45.
= 0,45.
Решение
1.
Определяем силу тяги по сцеплению
бульдозера:

где
 сцепная масса бульдозера, равная для
сцепная масса бульдозера, равная для
гусеничных машин массе трактора, с
установленным на нём рабочим бульдозерным
оборудованием, кН;

–коэффициент
сцепления гусениц с грунтом для данных
условий.
и
проверяем условие его движения без
буксования на первой передаче:

Условие
выполняется. Далее расчёты ведём с
учётом полной загрузки двигателя
бульдозера по мощности.
Набор
грунта
2.
Сопротивление перемещению бульдозера
при наборе грунта на горизонтальном
участке пути, i
= 0:

где
G
– масса бульдозера, т;
g
=
9,81 м/с2
– ускорение силы тяжести;
f
– коэффициент сопротивления качению
(или удельное сопротивление движению
гусеничной машины);
i
– уклон (знак «–») / подъём (знак «+»)
пути.
Набор
грунта обычно производится на
горизонтальном участке, в этом случае
i
= 0.
3.
Толщина стружки грунта, срезаемая в
начале набора. Другие сопротивления в
этот период отсутствуют:

где
 сила тяги бульдозера на первой
сила тяги бульдозера на первой
(максимальной по передаточному отношению)
передаче;
L
– длина отвала, м
Здесь
в числителе разность
 – это та часть тяги бульдозера, которая
– это та часть тяги бульдозера, которая
используется для преодоления сопротивления
грунта резанию в начальный период
набора.
Значение
 не должно превышать максимальной
не должно превышать максимальной
величины заглубления отвала для
конкретной модели бульдозера (табл.
П2).
4.
Объём призмы волочения:

где
L
– длина отвала, м
Н
– высота
отвала, м
ε
– угол
естественного откоса грунта в движении,
град
5.
Сопротивление призмы волочения при i
= 0,1:

где
V
– объём призмы волочения, м3;
 объёмная
объёмная
масса плотного грунта, т/м3;

коэффициент
трения грунта о грунт.
6.
Сопротивление движению грунта вверх
по отвалу:

где
α
– угол резания ножом отвала, град;
 коэффициент
коэффициент
трения грунта о сталь.
7.
Толщина стружки грунта, срезаемой в
конце операции набора:

8.
Средняя толщина стружки:

9.
Длина пути при наборе грунта:

где
 коэффициент потерь грунта при наборе;
коэффициент потерь грунта при наборе;
для связных грунтов ;
;
для сыпучих грунтов 1,3…1,5.
1,3…1,5.
10.
Время набора грунта:

где
 скорость перемещения бульдозера при
скорость перемещения бульдозера при
наборе грунта (рабочая скорость);
 2…4
2…4
км/час. Для машин с механической или
гидромеханической трансмиссией это
скорость на первой передаче, т.е.
 .
.
 коэффициент
коэффициент
замедления при трогании бульдозера с
места.
11.
Сопротивление грунта резанию при среднем
значении толщины срезаемой стружки
hср:

12.
Сопротивление грунта копанию при hср:
WK
= Wp
+ W2
+ W3
= 7,93 + 38,02 + 7,82 = 53,77 кН
В
процессе набора грунта сопротивления
на рабочем органе бульдозера (отвале)
меняются: с увеличением объёма призмы
волочения возрастают сопротивление
перемещению призмы волочения отвалом
бульдозера W2,
и сопротивление движению грунта вверх
по отвалу W3.
Так
как имеется ограничение по максимальному
тяговому усилию для данной модели
трактора ( по двигателю = 100 кН), то для преодоления
по двигателю = 100 кН), то для преодоления
суммарного сопротивления набора грунта =W1
=W1
+ Wp
+ W2
+ W3
приходится уменьшать толщину срезаемой
стружки. Если в начале набора грунта
максимальная толщина срезаемой стружки
составляет
0,06
м (это меньше максимального заглубления
отвала для данной модели бульдозера,
равного 0,527 м), то в конце набора она
составляет только 0,017 м.
Для
сравнения можно выбрать (для данных
условий) другой, более мощный, бульдозер,
например Cat
D8R
класса тяги 22,28 тс (222,8 кН) и сопоставить
результаты расчёта.
Гружёный
ход
13.
Определяем коэффициент потерь грунта
при его транспортировке:

где
 коэффициент вида и состояния грунта
коэффициент вида и состояния грунта
(табл. П1.2);

длина
пути гружёного хода бульдозера, м.
14.
Объём призмы волочения грунта в конце
пути транспортировки:

15.
Средний объём и средний вес призмы
волочения:
 ;
;

16.
Сопротивление гружёного хода бульдозера
с учётом уклона пути:

Гружёный
ход будем осуществлять на второй передаче
трактора:
 ,
,
т.е.
условие движения по двигателю выполняется.
Скорость
движения на второй передаче
 .
.
17.
Время гружёного хода:

где
 длина пути гружёного хода, м (табл. П1.1).
длина пути гружёного хода, м (табл. П1.1).
Разгрузка
18.
Определяем путь и время разгрузки призмы
грунта слоем
 при скорости не более 5 км/ч для обеспечения
при скорости не более 5 км/ч для обеспечения
его ровности. Разгрузку осуществляем
на третьей передаче трактора при скорости
 ;
;

Холостой
ход
19.
Путь холостого хода:

20.
Время холостого хода при движении
бульдозера задним ходом и под уклон
(схема челночная):

21.
Полное время рабочего цикла бульдозера.
Время переключения передач
 ,
,
количество переключений передач по
схеме – 3, время опускания отвалаtо
= 1 с

где
n
– число переключений передач (для машин
с механической трансмиссией);
tn
– время одного переключения (примерно
5 сек.);
to
– время опускания/подъёма отвала
(примерно 1…2 сек.);
Рис.
П1. Челночная схема работы бульдозера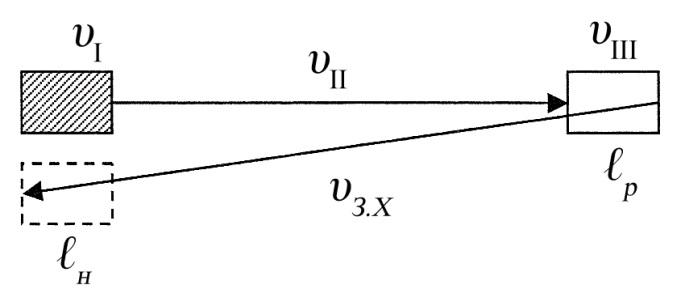
Производительность
22.
Сменная эксплуатационная производительность
бульдозера:

где
 объём призмы волочения грунта в конце
объём призмы волочения грунта в конце
операции гружёного хода с учётом его
потерь при транспортировке, м3;
 время
время
полного цикла, сек.

коэффициент
разрыхления грунта (табл. 2.2);

коэффициент,
учитывающий влияние уклона местности
на производительность бульдозера
(табл.2.2);

коэффициент
использования машины во времени в
течение смены;
8,2
– число часов в смене.
Производительность
бульдозера зависит от многих факторов,
которые в данной работе не рассматриваются.
В значительной степени производительность
зависит от способа производства работ:
при работе под уклон уменьшается
сопротивление перемещению грунта и
сопротивление движению бульдозера,
увеличивается объём грунта, перемещаемого
отвалом; при работе на подъём происходит
обратное явление и производительность
бульдозера снижается. При 10%-ном подъёме
его производительность уменьшается
примерно на 40÷50% по сравнению с
производительностью на горизонтальной
площадке. Такое уменьшение производительности
учитывается в формуле производительности
(2.1) с помощью коэффициента
 (табл. 2.2).
(табл. 2.2).
Стоимость
разработки грунта
23.
Определяем стоимость разработки одного
м3
грунта:

где
 стоимость машино-смены, руб/м-см
стоимость машино-смены, руб/м-см
(табл.2.1).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Коэффициенты динамичности y i, 1 5ц при работе механизма подъема вычисляют по формулам для % — (1.2.19), (1.2.21). Скорость отрыва груза от основания v при определении урц можно принимать равной скорости подъема груза (значения см. в т. 2, п. IV.9). При определении % принимают о — (0,35-ь-0,5) 1>п для крюковых перегрузочных кранов, работающих в режимах 6К, 7К, и о — (0,5- 0,8) для грейферных кранов (режим 8К) [c.461]
Оптимальная скорость подъема груза Уц находится аналогично определению скорости передвижения. При изменении скорости подъема меняются время цикла и расход электроэнергии за цикл вследствие изменения КПД электропривода. [c.24]
Динамические коэффициенты и г 3[ определяются согласно выражениям (1.12)— (1.16), а данные для определения коэффициента динамичности — по табл. 3.22, причем расчетную скорость отрыва груза от земли V можно принимать для случая нагрузок II (1 3[)) равной скорости подъема груза т. е. у = v , а для случая нагрузок I (1)3]) для кранов с регулируемым или автоматическим способом запуска подъемного механизма и = (0,35 0,5) а для кранов с нерегулируемым способом запуска подъемного механизма V = (0,5 -4- 0,65) Уд. [c.66]
Определение основных характеристик гидросистем погрузчиков выполняется по заданной грузоподъемности и скорости подъема груза в такой последовательности. Предварительно по конструктивным соображениям выбираем рабочее давление р (Па) для гидросистемы. Необходимое усилие, развиваемое гидроцилиндром подъема, [c.266]
После определения площадей и выбора конструктивных размеров необходимо проверить скорости подъема по ступеням. Скорости подъема груза по ступеням должны быть близки, иначе при переходе с одной ступени гидроцилиндра на другую будут рывки. [c.80]
При расчете конструкции на прочность, т. е. при определении фц, следует принимать V=VJ . При расчете конструкции на выносливость, т. е. при определении т]) для кранов режима С, V =(0,35-г– 0,5) для кранов режима Т у=(0,5- -0,8) Уд, где Уд — скорость “подъема груза. [c.54]
Программа, управляющая электронной моделью ПТМ, должна иметь элементы логики, имитирующие последовательность действий машиниста. Так, при подъеме груза из трюма судна во избежание удара груза о комингс люка не допускает- ся совмещение работы механизмов подъема и передвижения тележки перегружателя. Помимо этого, программа должна обеспечивать управление, близкое к оптимальному. Обычно в качестве критерия оптимальности в грузоподъемных машинах общего назначения принимается время цикла. Учитываются ограничения по перемещениям, скоростям, ускорениям груза и элементов грузоподъемных машин, а также по количеству включений механизмов за цикл. Наиболее сложны управляющие программы машин с гибким подвесом груза [7]. Этот перспективный метод формирования управляющих воздействий и определения нагрузок не требует создания дорогих управляемых имитационных комплексов. В настоящее время он разработан не в полной мере, что объясняется сложностью создания управляющих программ для ПТМ, имеющих несколько одновременно действующих механизмов. [c.115]
Скоростные тормоза. Эти тормоза предназначены для ограничения скорости опускания груза определенными пределами. Остановить механизм подъема они не могут. Действие тормозов основано на использовании центробежной силы специальных грузов, которые при достижении заданной скорости движения замыкают тормоз. [c.295]
К рабочим механизмам башенного крана, выполняющего строительно-монтажные работы, предъявляются требования обеспечения определенного диапазона регулирования скорости. У механизма подъема груза, кроме номинальной скорости подъема и спуска, должна быть малая скорость подъема и спуска (2—5 м/мин) для точной установки груза. У механизмов передвижения, поворота и изменения вылета наряду с номинальной скоростью нужна пониженная скорость для перемещения грузов на небольшие расстояния. Пуск и остановка механизмов должны быть достаточно плавными, чтобы не вызывать динамических ударов и раскачивания груза. [c.141]
Определение кинетической энергии движущегося тела или системы в функции обобщенной скорости не представляет трудности. Определение обобщенной силы Рх может быть пояснено на следующем примере. Рассмотрим случай подъема груза массой т (с учетом массы каната) лебедкой, барабан которой имеет радиус г (рис. 56). За обобщенную координату принимаем угол поворота барабана ф. [c.110]
При исследовании уравнения (2) Годдард имел целью найти минимум массы, необходимой для того, чтобы поднять на заданную высоту определенный полезный груз. Доказательство, что такой минимум массы существует, вытекает из следующих физических соображений …если на какой-нибудь промежуточной высоте скорость подъема чрезмерно велика, то сопротивление воздуха, зависящее от квадрата скорости, также будет очень велико. С другой стороны, если скорость подъема будет очень мала, то потребная реактивная тяга должна преодолевать притяжение Земли слишком долго. В обоих случаях необходимая масса топлива получается чрезмерно большой . Очевидно, — пишет Годдард,— что скорость подъема должна иметь значение, соответствующее каждому месту по высоте . Следовательно, задача состоит в том, чтобы неизвестную функцию y = o(L) определить так, чтобы потребный для подъема на данную высоту запас массы был минимален. Годдард полагал, что формулированная им задача не может быть решена точно, и предложил весьма грубый способ ее приближенного решения. [c.145]
Расчет механизма подъема ведется по следующим основным данным весу номинального поднимаемого груза совместно с весом грузозахватного устройства Q, необходимой высоте подъема Я, требуемой скорости подъема игр и заданному режиму работы механизма. В задачу расчета механизма подъема входит выбор схемы подвеса груза, определение нагрузок на элементы механизма, передаточного числа редуктора и размеров барабана, мощности приводного. двигателя и выбор типа двигателя, определение необходимого тормозного момента механизма. [c.269]
Проверяют скорости рабочих движений рабочих механизмов крана. Скорости можно определить путем регистрации времени перемещения на мерном участке. При этом для механизмов передвижения крана и тележки необходимо принимать в расчет среднее время перемещения в обоих направлениях. При определении скорости не следует учитывать периоды разгона и торможения (для механизма подъема грузов примерно Г с передвижение тележки 2—3 с передвижение крана 5—Юс). [c.98]
Определение мощности, необходимой для привода лебедок. Мощность, необходимая для подъема груза весом Q кгс приводной лебедкой со скоростью v м/с может быть определена по формуле [c.222]
При определении Мд условно можно принять движение груза в пусковой период равномерно ускоренным. В указанный период величина среднего ускорения груза зависит от заданной скорости подъема и принятой продолжительности пускового периода 4 [c.110]
На кране установлены ограничители грузоподъемности, вылета крюка, конечные выключатели высоты подъема груза, стрелы, поворота передвижения крана, анемометры для определения скорости ветра. На тележках крана имеются рельсовые захваты против угона ветром в нерабочем состоянии. [c.147]
Для определения оптимальной скорости подъема принимаем максимальное количество груза — 5,16 т. Из графика (рис. 10 1) видно, что такую производительность в зависимости от грузоподъемности могут обеспечить подъемники при скорости 12,5—20 м/мин и легкие краны при скорости 20—30 м/мин. [c.247]
Важнейшими показателями, характеризующими грузоподъемную машину, являются грузоподъемность, высота подъема, скорости подъема, опускания и перемещения груза, для передвижных машин — скорость передвижения самой машины. Эти показатели являются основными при определении производительности и мощности при расчете конструкции машины. [c.11]
Аналитический метод определения высоты подъема и скоростей перемещения груза [c.31]
Насосы предназначены для нагнетания рабочей жидкости в гидросистему автокрана, т. е. для создания в гидросистеме определенного давления рабочей жидкости и требуемого ее расхода. На автокранах применяются шестеренные насосы НШ (ГОСТ 8753—71). Рабочее давление, развиваемое насосом, указывается в его технической характеристике (табл. 8). Требуемая производительность насоса зависит от геометрических параметров автокрана, рабочих скоростей его звеньев и является величиной расчетной. Высота подъема каждого звена стрелы известна из кинематической схемы автокрана, а средние скорости подъема и опускания груза и поворота стрелы указываются в техническом задании. [c.50]
Устройства, работающие на данном принципе, могут быть использованы не только в механизмах подъема для быстрого опускания груза, но и когда требуется ограничить скорость движения механизма. Так, для механизмов передвижения кранов, работающих на эстакадах, для перегрузочных мостов и их тележек желательно для уменьщения динамической нагрузки при подходе к концевым упорам, чтобы они автоматически снижали скорость движения до определенной величины, с которой и продолжали бы свое движение. Обычные схемы управления движением крана с торможением здесь не подходят, так как они затормаживают механизм, не обеспечивая дальнейшего движения с уменьшенной скоростью. В этом случае применяется тормозное устройство, выполненное по схеме фиг. 215, а, где двигатель механизма, соединенный со шкивом 2, служит одновременно и для управления тормозом. Поворачивающийся корпус двигателя соединен с рычагами 4 управления тормозом таким образом, что его крутящий момент при обоих направлениях движения воздействует на тормоз, размыкая его. Однако и в этом случае перед размыканием тормоза двигателю приходится преодолевать усилие предварительно сжатой пружины 3. Как и в механизме по фиг. 214, процесс регулирования скорости протекает в весьма узких пределах, [c.329]
При необходимости можно поднимать и укладывать груз с пониженными скоростями. Для этого погрузчик затормаживают и контроллер ставят в одно из трех первых положений, после чего производят необходимую операцию. Снижение скоростей механизма подъема при этом получается в результате уменьшения напряжения батареи путем параллельного включения секций в указанных положениях контроллера. Данный способ работы является наиболее экономичным по расходу энергии батареи, но требует от водителя определенного навыка и внимания, поэтому применение его возможно лишь при хорошем освоении водителем работы на погрузчике. [c.125]
Примеры решения модельных задач о наборе максимальной энергии при вертикальном подъеме и об оптимальной вертикальной посадке в постоянном плоскопараллельном гравитационном поле, о. посадке с круговой орбиты спутника и о наборе гиперболической скорости при старте с круговой орбиты спутника показали, что, несмотря на малые значения удельного веса двигателей ограниченной скорости истечения, учет веса двигательной системы суш,ественно влияет на параметры оптимального движения тела переменной массы и приводит к экстремальной задаче определения наивыгоднейшего значения веса двигателя (максимальной тяги), обеспечиваюш его максимум доставляемого полезного груза [c.273]
В зависимости от величины слабины канатов, типа приводного механизма двигателя и системы запуска канаты могут начать натягиваться до окончания разгона двигателя или после его полного разгона. В последнем случае динамические усилия выше. При определении динамических нагрузок механизма подъема при пуске с подхватом груза принимаем сначала, что механизм подъема стоит на жестком основании, т. е. считаем металлоконструкцию крана абсолютно жесткой. Величина динамического усилия в упругом элементе механизма подъема при подхвате груза с опоры, возникающего после разгона двигателя до номинальной скорости, определяется по двухмассовой расчетной схеме (рис. 118). [c.237]
Устройства, работающие на данном принципе, могут быть использованы не только в механизмах подъема для быстрого опускания груза, но и когда требуется ограничить скорость движения механизма. Так, для механизмов передвижения кранов, работающих на эстакадах, для перегрузочных мостов и их тележек желательно с целью уменьшения динамической нагрузки при подходе к концевым упорам автоматическое снижение скорости движения до определенной величины, которая затем и сохраняется. [c.317]
В ы o о р. м о д и ф 1 к а а и и м а ш и и н о с о р о с т и п е р е д в и к е и и я. Формула (22) мажет быть использована для определения оптимального количества модификаций погрузчиков и их оптимальных скоростей передвижения и подъема вил. Суммарные приведенные затраты на переработку 1 т груза при использовании нескольких модификаций [c.23]
На рис. 93, а, б даны расчетные схемы грузовой стрелы для определения максимального усилия в канате при подъеме или подтягивании груза и усилий в стреле и вантах. Направление каната при подтягивании груза переменно и зависит от расстояния между головкой стрелы и местоположением груза. При подтягивании в зависимости от рельефа местности или расположения эстакад груз перемещается по горизонтальной или наклонной плоскости. Ввиду малых скоростей каната при подъеме или опускании груза инерционным усилием можно пренебречь. Не учитывается также ветровая нагрузка. [c.280]
Динамические коэффициенты J)i и определяются по формуле (1.2.21), а данные для определения коэффициента динамичности— табл. 1,2.21, причем расчетную скорость отрыва груза от земли V можно принимать для II случая нагружения ( ц) равной скорости подъема груза Уц, т. е. и = Уц, а для I случая нагружения (фх) для кранов режима работы 4К, 5К — (0,35-f–г-0,5) Уц, а для кранов режима работы 6К—8К — (0,5-т-0,8) Оц-Расчетная скорость отрыва груза от основания зависит в первую очередь от способа запуска подъемного механизма (нерегулируемый, регулируемый или автоматический), частоты подъема грузов, близких -к оминальнш[у и от мех-анической характеристики двигателя [0.211. [c.135]
Полиспасты. Система, состоящая из подвижных и неподвижных блоков, огибаемых канатом, представляет собой простейшее грузоподъемное устройство — полиспаст (рис.61,в), с помощью которого можно уменьшить усилие, развиваемое лебедкой, изменить направление прилагаемого к грузу усилия (т.е. тянуть за свободный конец полиспаста вниз или в сторону) и уменьшить скорость подъема груза по сравнению со скоростью каната, наматываемого на барабан лебедки. Полиспаст характеризуется кратностью, показывающей, во сколько раз требуемое для подъема груза усилие меньше заданной массы груза. Так как число ветвей полиспаста, на которое распределяется масса поднимаемого груза, численно равно кратности полиспаста, можно рекомендовать следующий простой способ ее определения. Если полиспаст мысленно рассечь плоскостью (рис.61,г) пересекающей все ветви каната, который огибает блоки, то кратность полиспаста численно будет равна числу пересеченных плоскостью канатов. Чем больше кратность полиспаста К, тем меньше усилие Р, которое необходимо развивать лебедкой для подъема заданного груза Р и тем больше скорость наматываемого на барабан каната Ук, которая обеспечивает заданную скорость подъема груза Уг. Другими словами, Ук=К-Уг и P =P/Kh=Qg/Kh, где Ь – кпд полиспаста, а – ускорение свободного падения. Блоки полиспаста закрепляют на двух или нескольких (по вертикали) параллельных осях, образуя неподвижные блочные обоймы. Крюк грузового полиспас- [c.121]
Однако, так как ГУ являются оборудованием, которое непосредственно с краном не связано и может быть применено в любом кране соответствующей грузоподъемности, необходи.мо знать экстремальное значение возможного коэффициента динамичности при нерегулируемой скорости подъема груза. При его определении для некоторых типовых кранов можно пользоваться нормативными да-чными. Так, для башенных кранов приближенно допускается определять период колебаний Т груженого крана (с грузом на крюке) по данным табл. 1.12 (ГОСТ 13994—75). [c.24]
Пример определения расчетных нагрузок механизма вспомогательного подъема мостового крана Р = 50+ 10 тс (рис. 6.36). Полиспаст сдвоенный, кратность полиспаста т=2. Общая длина одной ветви каната от барабана до уравнительного блока на раме тележки при высоте подъема 6 м составляет 1 — 15 м. Канат 16,5-Г-1-170, ГОСТ 2688—69. Расчетная площадь сечения проволок — 104,61 мм . Модуль упругости каната к=0,84-10 кгс/см . Диаметр барабана, считая по осям канатов, О — 516,5 мм. Передаточное число редуктора /р, его к. п. д. т]р и к. п. д. барабана т), см. на рис. 6.36. Электродвигатель МТ-52-8, = 30 кет, п= 726 об1мин. ПВ 25%. Усилие в каждом канате при подъеме груза р = 10/пс и подвески равно 5 = 2600 кгс. Скорость подъема груза г =18,7 м1мин. [c.367]
Лебедки следящего действия применяют в судовых кранах для подъема грузов, качающихся на волн . Лебедки должны рбеспе-чить скорость крюка, равную максимальной относительной скорости вертикального перемещения качающегося на волне гру а, и возможность качания на волне застропленного груза. В схеме на рис. VI.2.16 заданное натяжение в канате следящей лебедки 7 создается при определенном давлении в гидроцилиндре Р. При опускании принимающего груз судна следящий канат вдвигает поршень 10 в цилиндр 9, расстояние между блоками // и 12 еле-, дящего и грузового канатов уменьшается, груз опускается, сохраняя неизменным расстояние до палубы. При подъеме npij-нимающего груз судна слабина следящего и грузового канатов устраняется за счет дополнительного давления в цилиндре от компрессора /. Кран 5 служит для блокировки слежения (подробнее см. в работах iO.32, 0.59, 311). [c.385]
В первый период, за время Т(,р происходит изменение частоты вращения тормозного шкива под действием момента от транспортируемого груза Му при отсутствии как движущего момента от приводного двигателя механизма Л1дв, так и тормозного момента М . При этом в механизмах передвижения и поворота ПТМ (рис. 1.4, в) скорость вращения тормозного шкива уменьшается, а в механизмах подъема груза — уменьшается при торможении поднимаемого груза (рис. 1.4, а) и увеличивается при торможении опускаемого груза (рис. 1.4, б). При определенном сочетании веса груза, номинальной скорости опускания и времени срабатывания тормоза фактическая скорость груза в начале торможения может вдвое превосходить номинальную и даже более. [c.16]
Определение целевой функции для оптимизации па ра метров машин. В качестве целевой функции должен быть принят такой комплексный показатель, который характеризовал бы все затраты на создание и эксплуатацию д ашины за весь срок службы, отнесенные к суммарному полезному эффекту. Таким показателем являются приведенные затраты на переработку 1 т груза [с.м. формулу (15)1, которые функционально устанавливают зависимость стоимости создания и эксплуатации машины и производительности от основных ее параметров скоростей передви.жения. машины и подъема груза, ускорения разгона и торможения, массы машины, энергоемкости батареи, срока службы, надежности и других параметров. Как уже отмечалось, за оптимальные принимают такие параметры машины, прп которых достигаются наименьшие приведенные затраты на переработку 1 т груза, а следовательно, нагюольпии экономический эффект. [c.20]
Две первые буквы означают — таль электрическая, цифра за ними — грузоподъемность в тоннах три цифры после тире обозначают первая — номер исполнения согласно табл. 6, вторая — исполнение барабана (соответствующее определенной канатоемкости и высоте подъема груза), третья — число скоростей механизма подъема. Если электроталь заказывается с кабиной, то к номеру исполнения добавляется буква К (например, ТЭ5-9К11)-122 [c.122]
Наибольшие динамические нагрузки у башенных кранов с поворотной колонной отмечаются при онускании груза после его разгона или торможения. Это объясняется тем, что при опускании переходные процессы самые кратковременные, а скорость движения груза оказывается значительно больше, чем при подъеме. Особенно существенно на увеличение скорости опускающегося груза влияет запаздывание наложения тормозных колодок, управляемых электрогидротолкателем после включения двигателя механизма подъема. Разгон и торможение опускающегося груза следует считать расчетными случаями для определения динамических нагрузок рабочего состояния крана. [c.336]
При определении образующегося количества тепла в тормозах механизмов передвижения и подъема следует учитывать, на какой скорости движения начинается торможение — на полной, на предварительно сниженной электроторможением или на увеличенной действием веса груза. [c.372]
Если средине радиусы диска / п зубчатого колеса 3 (см. рис. 4.16) неодинаковы, то в формулу определения осевой сжимающей силы при подъеме V,, следует подставлять произведение R, 1ля той пары поверхностей трення, для которой это произведение меньше и требуется соответственно большая сила. V,,. Для надежного удержания груза в нодвешенно.м состоянии необходимо, чтобы сумма моментов трення leждy диском /, храповым и зубчатым колесами и моментов трения всех частей механизма от тормоза до двигателя (пр] скорости на среднем радиусе диска трения не более 3—4. м/с, для которой можно пренебречь силами инерции) была большей или равной грузовому моменту, действующему иа тормозном валу, т. е. [c.153]
Подъемниками называются такие подъемные приспособления, к-рые поднимают груз наклонно или вертикально в одном определенном направлении. Груз при этом обычно передвигается по вертикальным направляющим внутри остова подъемника в шахте или по рельсам, по к-рым поднимается вагон с грузом при наклонных подъемах. В отношении требований безопасности делается основное различие между подъемниками для людей и для грузов. Особые требования предъявляются к рудничным подъемникам, работающим с особенно тяжелыми грузамии большими скоростями. Обыкновенные лифты для жилых и служебных зданий обычно строятся грузоподъемностью примерно до 1 500 тег, редко для большей нагрузки. Для грузоподъемности меньше 500 кг при небольшой высоте подъема и редком поль-Фиг. 17. зовании часто применяют ручной привод, причем или просто тянут подъемный канат рукой или совершают подъем при помощи тягового. колеса через зубчатую передачу. В этих случаях применяется б. ч. фрикционная лебедка канатный шкив лебедки тянет благодаря трению подъемный канат, на одном конце к-рого находится груз, а на другом—противовес. На фиг. 17 изображена схема обыкновенного подъемника с приводным шкивом. За последнее время и для маленьких подъемников пользуются электрическим приводом и простой барабан- —– [c.55]
Уточненное определение нараме -ров процесса торможения (времени, пути, скорости в начале торможения) в механизмах подъема требует учета сравнительно большого времени срабатывания некоторых конструкций тормозов при торможении во время опускания груза. Ускорение опускания груза, когда двигатель выключен, а тормоз еще не сработал, [c.196]
Теория составной ракеты (стр. 68— 74). Движение составной ракеты в воздухе (стр. 166—173). Метод подъема потолка ракеты путем предварительного снижения уровня старта (стр. 158—160). Метод определения расхода топлива при пересечении атмосферы ракетой, взлетающей вертикально (стр. 143—147). Максимум высоты подъема ракеты в функции начального запаса топлива (стр. 156— 157). Оптимальное давление в камере сгорания (стр. 157—158). Парадоксы 1) давления в камере сгорания 2) мертвого веса 3) массы топлива 4) повторных пусков двигателя (стр. 161—166). Формула мгновенного к.п.д. ракеты, движущейся в сопротивляющейся среде (стр. 65). Формула полного динамического к.п.д. для полезного груза ракеты (формула 84, стр. 66). Максимальная кинетическая энергия ракеты (стр. 67). Отношения между достигнутыми скоростями и пройденными путями в поле тяготения и в свободном пространстве для ракет с постоянным ускорением реактивной силы (формулы 272 и 273 на стр. 141). Метод проектирования стратосферной ракеты (стр. 154—156). Максимум количества движения истекающей из сопла газовой струи (стр. 78). Применение контурных коек для экипажа космического летательного аппарата с целью увеличения сопротивляемости организма перегрузке (стр. 42). Указатель пути (одограф), который в отличие от ранее предложенных для этой цели приборов (например, Обертом, Эно-Пельтри и др.), дает возможность отличить ускорение свободного падения от реактивного ускорения (стр. 97). Расчеты гелиоцентрических орбит, аналогичных орбитам искусственных планет Луна-1 , Пионер-4 , Пионер-5 , Ве-нера-1 , Рейнджер-3 , Марс-1 [c.210]
При определении динамических коэффициентов обычно рассматривают два случая отрыв груза от основания при слабонатянутом канате (подъем с подхватом) и разгон (при подъеме) или торможение (при опускании) груза навесу. Динамические коэффициенты г )1 и “Фи, принимаемые при расчетах на выносливость и прочность, определяют по одной и той же формуле, но с подстановкой разных значений скорости. [c.54]
