Рассмотрим понятия угловой скорости и углового ускорения при вращении твердого тела в теории и на примерах решения задач.
Угловая скорость
Угловой скоростью называют скорость вращения тела, определяющуюся приращением угла поворота тела за некоторый промежуток (единицу) времени.
Обозначение угловой скорости: ω (омега).
Рассмотрим некоторое твердое тело, вращающееся относительно неподвижной оси.
С этим телом свяжем воображаемую плоскость П, которая совершает вращение вместе с заданным телом.
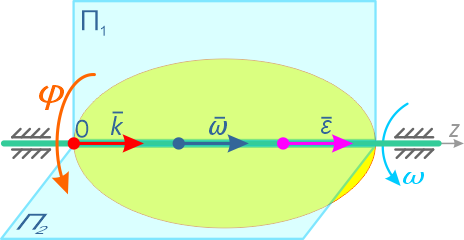
Вращательное движение определяется двугранным углом φ между двумя плоскостями, проходящими через ось вращения. Изменение этого угла с течением времени есть закон вращательного движения:
Положительным считается угол, откладываемый против хода часовой стрелки, если смотреть навстречу выбранному направлению оси вращения Oz. Угол измеряется в радианах.
Быстрота изменения угла φ (перемещения плоскости П из положения П1 в положение П2) – это и есть угловая скорость:
Приняв вектор k как единичный орт положительного направления оси, получим:
Вектор угловой скорости – скользящий вектор: он может быть приложен к любой точке оси вращения и всегда направлен вдоль оси, при положительном значении угловой скорости направления ω и k совпадают, при отрицательном – противоположны.
Формулы угловой скорости
Формула для расчета угловой скорости в зависимости от заданных параметров вращения может иметь вид:
- если известно количество оборотов n за единицу времени t:

- если задан угол поворота φ за единицу времени:
- если известна окружная скорость точки тела v и расстояние от оси вращения до этой точки r:


Размерности угловой скорости:
- Количество оборотов за единицу времени [об/мин], [c-1].
- Угол поворота за единицу времени [рад/с].
Определение угловой скорости
Пример: Диск вращается относительно своего центра.
Известна скорость v некоторой точки A, расположенной на расстоянии r от центра вращения диска.
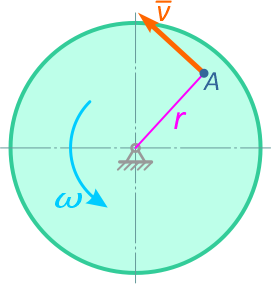
Определить величину и направление угловой скорости диска ω, если v = 5 м/с, r = 70 см.
Таким образом, угловая скорость диска составляет 7,14 оборотов в секунду. Направление угловой скорости можно определить по направлению скоростей её точек.
Вектор скорости точки A стремится повернуть диск относительно центра вращения против хода часовой стрелки, следовательно, направление угловой скорости вращения диска имеет такое же направление.
Другие примеры решения задач >
Угловое ускорение
Угловое ускорение характеризует величину изменения угловой скорости при вращении твердого тела:
Обозначение: ε (Эпсилон)
Единицы измерения углового ускорения: [рад/с2], [с-2]
Вектор углового ускорения так же направлен по оси вращения. При ускоренном вращении их направления совпадают, при замедленном — противоположны.
Другими словами, при положительном ускорении угловая скорость нарастает (вращение ускоряется), а при отрицательном — уменьшается (вращение замедляется).
Для некоторых частных случаев вращательного движения твердого тела могут быть использованы формулы:
Расчет углового ускорения
Пример: По заданному значению касательной составляющей полного ускорения aτ точки B, расположенной на расстоянии r от центра вращения колеса.
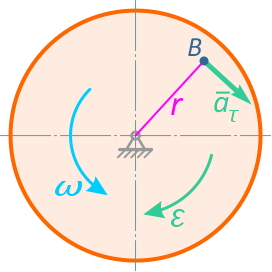
Требуется определить величину и направление углового ускорения колеса ε, если aτ = 10 м/с2, r = 50 см.
Угловое ускорение колеса в заданный момент времени составляет 20 оборотов за секунду в квадрате. Направление углового ускорения определяется по направлению тангенциального ускорения точки.
Здесь, угловое ускорение направлено противоположно направлению угловой скорости вращения колеса. Это означает, что вращение колеса замедляется.
В технике угловая скорость часто задается в оборотах в минуту n [об/мин]. Один оборот – это 2π радиан:
Например, тело совершающее 1,5 оборота за одну секунду имеет угловую скорость
ω = 1,5 с-1 = 9,42 рад/с.
Смотрите также:
- Примеры расчета угловой скорости и ускорения
- Скорости и ускорения точек вращающегося тела
Линейная скорость через угловую, теория и онлайн калькуляторы
Линейная скорость через угловую
Определение
Мгновенной (истинной) скоростью ($overline{v}$) называют векторную физическую величину, равную производной от вектора перемещения по времени ($t$):
[overline{v}={mathop{lim }_{Delta tto 0} frac{Delta overline{r}}{Delta t}=frac{doverline{r}}{dt} }left(1right).]
$Delta overline{r}$- вектор перемещения материальной точки, это перемещение точка совершает за отрезок времени $Delta t$.
Выражение линейной скорости через угловую скорость
Скорость называют мгновенной, так как ее значение показывает величину скорости в определенный момент времени.
Так как вектор перемещения $Delta overline{r}$ направлен по хорде, которая соединяет две близкие точки криволинейной траектории движения частицы, при уменьшении расстояния между этими точками, вектор $Delta overline{r}$ занимает положение касательной к линии, по которой движется частица. Из определения (1) следует, что мгновенная скорость направлена по касательной к траектории движения.
Скорость прохождения пути ($s$) определяют:
[v={mathop{lim }_{Delta tto 0} frac{Delta s}{Delta t}=frac{ds}{dt}left(2right). }]
Мгновенную скорость называют линейной тогда, когда хотят подчеркнуть ее отличие от угловой скорости.
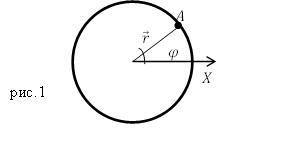
Если материальная точка движется по окружности, то ее положение характеризуют при помощи угла поворота ($varphi $), который образует радиус-вектор ($overline{r}$), определяющий положение рассматриваемой точки А с выделенным неизменным направлением от которого производят отсчет (рис.1).
Быстроту изменения угла поворота $varphi $ характеризуют при помощи такой физической величины как угловая скорость. Обычно угловую скорость обозначают буквой $omega $. Угловая скорость равна:
[omega =frac{dvarphi }{dt}left(3right).]
Вращение называют равномерным, если угловая скорость постоянна $omega =const$. При равномерном вращении $omega $ можно называть угловой частотой.
Линейная скорость движения точки по окружности связана с угловой скоростью. Пусть точка проходит путь равный длине дуги XA (рис.1). Этот путь обозначим $s$. Если радиус окружности равен$ R=const$, то длину дуги найдем как:
[s=Rvarphi left(4right).]
Продифференцируем обе части выражения (4) по времени, имеем:
[frac{ds}{dt}=frac{dleft(Rvarphi right)}{dt}=Rfrac{dvarphi }{dt}left(5right).]
Мы видим, что в левой части получена величина линейной скорости, в правой части радиус окружности умножен на угловую скорость:
[v=Romega left(6right).]
Формула (6) будет справедлива при движении точки по криволинейной траектории отличной от окружности, но в этом случае $R$ – радиус кривизны траектории в месте нахождения частицы.
В векторном виде выражение (6) записывают так:
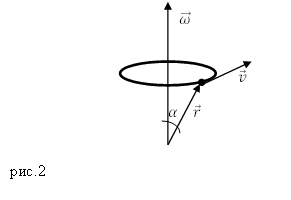
[overline{v}=overline{omega }times overline{r}left(7right),]
$overline{r}$ – вектор, соединяющий ось вращения и движущуюся точку (рис.2). Модуль скорости, используя формулу (7) найдем как:
[v=omega r{sin alpha left(8right), }]
где $alpha $ – угол между вектором угловой скорости и $overline{r}.$
Угловая скорость через линейную
Исходя из приведенных выше формул угловую скорость можно выразить через линейную. При движении по окружности:
[omega =frac{v}{R}left(9right).]
Или используя формулу (8) угловую скорость выразим как:
[omega =frac{v}{r{sin alpha }}left(10right).]
Примеры задач с решением
Пример 1
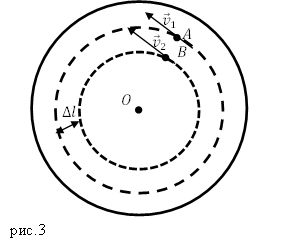
Задание. Диск равномерно вращается вокруг оси (O), перпендикулярной его плоскости, проходящей через его центр (рис.3). Линейная скорость точки A равна $v_1$, Точка B находится на расстоянии $Delta l$ ближе к оси и имеет лилейную скорость $v_2$. Какова угловая скорость вращения диска ($omega $)?
Решение. Основой для решения задачи будет формула:
[omega =frac{v}{R}left(1.1right).]
Угловые скорости движения точки A и B одинаковы (${omega }_A={omega }_B$), запишем выражение для каждой из этих скоростей используя (1.1):
[{omega }_A=frac{v_1}{R_1};; {omega }_B=frac{v_2}{R_2}left(1.2right).]
$R_1$ – расстояние от точки O до точки A; $R_2=R_1-Delta l$ – расстояние от точки B до точки O. Приравняем правые части выражений (1.2), выразим расстояние $R_1$:
[frac{v_1}{R_1}=frac{v_2}{R_1-Delta l}to R_1=frac{Delta lcdot v_1}{v_1-v_2}left(1.3right).]
Найдем угловую скорость точки A:
[{omega }_A=v_1cdot frac{v_1-v_2}{Delta lcdot v_1}=frac{v_1-v_2}{Delta l}.]
Ответ. Угловая скорость всех точек диска равна $omega =frac{v_1-v_2}{Delta l}$
Пример 2
Задание. Колесо радиусом R=1 м вращается так, что угол поворота изменяется в соответствии с
законом: $varphi left(tright)=2+5t^3(рад)$. Определите, какова линейная скорость точек обода колеса в момент времени,
равный $t’=1 (с)$.
Решение. В качестве основы для решения задачи воспользуемся формулой:
[v=Romega left(2.1right).]
Используя уравнение $varphi left(tright)$ и связь угла поворота и угловой скорости найдем $omega $:
[omega =frac{dvarphi }{dt}=frac{d}{dt}left(A+Bt^3right)=3Bt^2(2.2).]
Подставим результат (2.2) в (2.1), имеем:
[v=Rcdot 3Bt^2.]
Вычислим искомую скорость:
[v=1cdot 3cdot 5cdot 1^2=15 left(frac{м}{с}right).]
Ответ. $vleft(t’right)=15frac{м}{с}$
Читать дальше: масса и плотность вещества.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Содержание:
Плоское движение тела:
При изучении темы ПЛОСКОЕ ДВИЖЕНИЕ ТЕЛА раздела КИНЕМАТИКА. вы научитесь применять аналитические и графические методы для определения скоростей и ускорений точек тел и механизмов. Хотя эти знания имеют самостоятельную ценность, особенно необходимы они будут для решения задач динамики тела и системы.
Приведены программы расчета кинематики плоского движения в математической системе Maple V. Анимационные возможности этой системы делают решение наглядным, позволяя глубже понять суть задачи.
Методы решения задачи кинематики плоского движения разнообразны. Выбрать оптимальный путь, который может существенно упростить решение, помогут примеры, приведенные в этой главе.
Скорости точек многозвенного механизма
Постановка задачи. Плоский многозвенный механизм с одной степенью свободы находится в движении. Известна угловая скорость какого-либо его звена или скорость одной из точек механизма. Найти скорости точек механизма и угловые скорости его звеньев.
План решения:
Рассмотрим два простых геометрических способа решения задачи, в которых, в отличие от аналитических методов, определяются модули скоростей и угловых скоростей. Не оговаривая отдельно, всякий раз под угловой скоростью 
1-й способ. Мгновенные центры скоростей
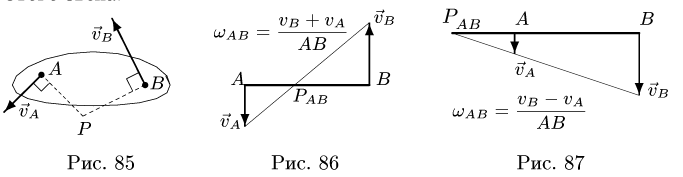
1. Определяем положение мгновенного центра скоростей (МЦС) каждого звена. МЦС лежит на пересечении перпендикуляров, проведенных
к скоростям точек, принадлежащих звену (рис. 85). У тех звеньев, у которых МЦС не существует (скорости двух точек параллельны и не перпендикулярны отрезку, их соединяющему), угловая скорость равна нулю, а скорости всех точек равны. Если векторы скоростей перпендикулярны отрезку их соединяющем}’, то имеют место два частных случая положения МЦС (рис. 86, 87).
Если тело (колесо, диск, цилиндр) катится по поверхности без проскальзывания, то МЦС этого тела находится в точке касания.
2. Для каждого звена определяем расстояния от его точек до МЦС этого звена.
3. Записываем систему уравнений для скоростей N точек звена  включая точку с известной скоростью:
включая точку с известной скоростью:

Здесь — угловая скорость звена
— угловая скорость звена  — расстояние от МЦС звена
— расстояние от МЦС звена до точки
до точки  Решаем систему, определяем угловую скорость звена, а затем скорости всех его точек.
Решаем систему, определяем угловую скорость звена, а затем скорости всех его точек.
Этот пункт плана выполняем последовательно для всех звеньев механизма. Очередное звено должно иметь общую точку (шарнир) с предыдущим, для которого угловая скорость найдена или известна.
2-й способ. План скоростей
1. Как и в методе МЦС ведем расчет, переходя от одного звена к другому, шарнирно с ним соединенном}’.
Построение начинаем с вектора, величина и направление которого известны или легко вычисляются. Этот вектор в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Его конец определяет первую точку плана скоростей. Точку плана скоростей (конец вектора) отмечаем строчной буквой, соответствующей точке вектора скорости. Пусть первая точка плана скоростей обозначена как b.
2. Рассматриваем очередное звено, на котором имеется точка с уже известной скоростью. Необходимо, чтобы на этом звене была
еще одна точка с известным направлением вектора скорости (например, ползун или точка звена, совершающего вращательное движение). Пусть эта точка обозначена как С (рис. 88).
Справедливо правило, согласно которому неизменяемые отрезки механизма, обозначенные прописными буквами, перпендикулярны отрезкам плана скоростей, обозначенными теми же строчными буквами.
Следующая точка плана скоростей лежит на пересечении двух прямых. Одна прямая определяется направлением скорости точки С, вторая перпендикулярна ВС. Длина полученного отрезка Ос является модулем скорости  (рис. 91).
(рис. 91).
Скорости остальных точек этого звена (если таковые имеются) найдем по правилу подобия неизменяемых фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей.
Пункт 2 плана выполняем для всех звеньев механизма (рис. 91-95).
3. После построения плана скоростей определяем угловую скорость каждого звена по простой формуле  где
где  расстояние между точками
расстояние между точками  звена,
звена,  — длина отрезка на плане скоростей.
— длина отрезка на плане скоростей.
Задача №1
Плоский многозвенный механизм с одной степенью свободы приводится в движение кривошипом АВ, который вращается против часовой стрелки с угловой скоростью  (рис. 88).
(рис. 88).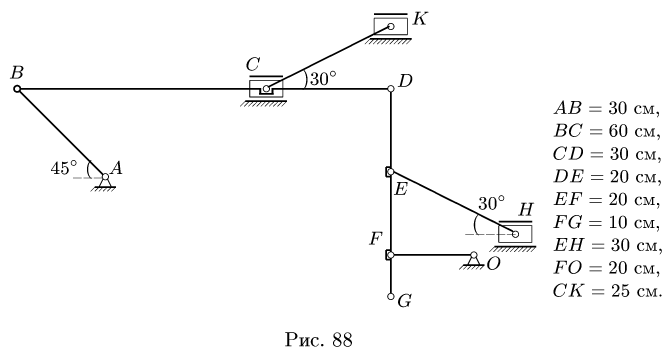
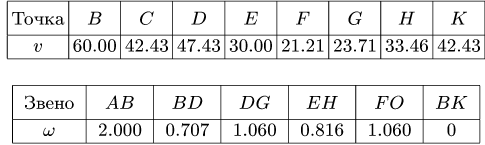
Ползуны С, К, Н движутся горизонтально,  Найти скорости точек В, С, D, Е, F, G, Н, К механизма и угловые
Найти скорости точек В, С, D, Е, F, G, Н, К механизма и угловые
8.1.Скорости точек многозвенного механизма скорости его звеньев АВ, BD, DG, EH, FO, СК.
Решение
1-й способ. Мгновенные центры скоростей
1. Определяем положение мгновенного центра скоростей каждого звена АВ, BD, DG, СК, EH, FO.
МЦС звеньев АВ и FO искать не требуется. Они совершают вращательное движение вокруг шарниров А и О соответственно. Можно условно считать, что там находятся их МЦС.
Вектор  скорости точки В направим перпендикулярно радиусу АВ против часовой стрелки (рис. 89). Далее, чтобы узнать положение МЦС следующего звена надо знать направления векторов скоростей двух его точек. Следующим звеном будет стержень BD, имеющий со звеном АВ общую точку В. У него есть три характерные точки В, С и D. Направление вектора скорости точки D пока неизвестно.
скорости точки В направим перпендикулярно радиусу АВ против часовой стрелки (рис. 89). Далее, чтобы узнать положение МЦС следующего звена надо знать направления векторов скоростей двух его точек. Следующим звеном будет стержень BD, имеющий со звеном АВ общую точку В. У него есть три характерные точки В, С и D. Направление вектора скорости точки D пока неизвестно.
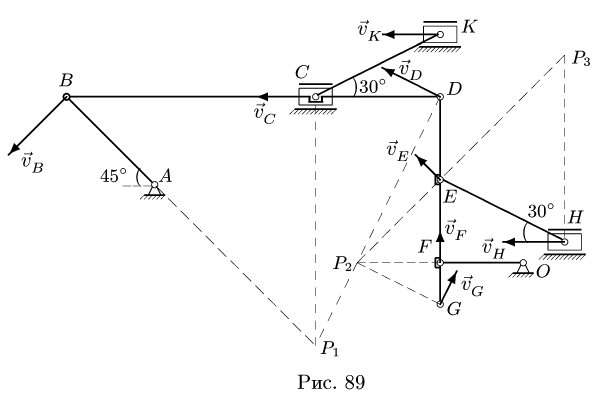
Остается точка С. Ползун С движется строго горизонтально. Вектор скорости  направляем по горизонтали налево. Из двух возможных горизонтальных направлений мы выбрали этот вариант, исходя из теоремы о проекции векторов скоростей точек неизменяемого отрезка. Проекции должны быть равны и направлены в одну сторону. Таким образом, известны направления скоростей двух точек тела. Это позволяет определить МЦС звена BCD. Находим точку
направляем по горизонтали налево. Из двух возможных горизонтальных направлений мы выбрали этот вариант, исходя из теоремы о проекции векторов скоростей точек неизменяемого отрезка. Проекции должны быть равны и направлены в одну сторону. Таким образом, известны направления скоростей двух точек тела. Это позволяет определить МЦС звена BCD. Находим точку пересечения перпендикуляров, проведенных из точек В и С, к векторам
пересечения перпендикуляров, проведенных из точек В и С, к векторам  (рис. 89). Теперь определяем направление вектора
(рис. 89). Теперь определяем направление вектора  Он будет перпендикулярен радиусу
Он будет перпендикулярен радиусу  и направлен налево, исходя из той же теоремы о проекциях скоростей точек отрезка BD.
и направлен налево, исходя из той же теоремы о проекциях скоростей точек отрезка BD.
Со стержнем BCD имеют общие точки два стержня: СК и DG. Рассмотрим сначала стержень DG. Направление вектора скорости точки D уже известно. Чтобы определить положение МЦС, надо знать направление вектора еще одной точки на этом звене. Такой точкой является F. Вектор ее скорости перпендикулярен радиусу вращения FO и направлен вертикально. Перпендикуляры к векторам  задают положение точки
задают положение точки  вокруг которой звено DEFG совершает мгновенное вращательное движение.
вокруг которой звено DEFG совершает мгновенное вращательное движение.
Перпендикулярно радиусам  проводим вектора
проводим вектора 
Переходим к звену ЕН, МЦС которого находим на пересечении перпендикуляров к  (продолжение радиуса
(продолжение радиуса  и к вектору скорости
и к вектору скорости  ползуна Н, движущегося горизонтально. Получаем точку
ползуна Н, движущегося горизонтально. Получаем точку — МЦС звена ЕН.
— МЦС звена ЕН.
И, наконец, рассматриваем звено СК. Скорости  параллельны и не перпендикулярны СК. Звено С К совершает мгновенно-поступательное движение. Условно можно сказать, что МЦС звена С К находится в бесконечности.
параллельны и не перпендикулярны СК. Звено С К совершает мгновенно-поступательное движение. Условно можно сказать, что МЦС звена С К находится в бесконечности.
2. Определяем расстояния от МЦС звеньев до тех точек этих звеньев, скорости которых надо найти.
Звено BCD
Звено DEFG. Пользуясь подобием  находим
находим 
Звено ЕН (рис. 90). Находим расстояния до МЦС:

8.1.Скорости точек многозвенного механизма

3. Записываем систему уравнений для скоростей трех точек звена BCD, включая точку В с известной скоростью:
Решаем эту систему. Находим 

Система уравнений для скоростей точек звена DEFG имеет вид
Из первого уравнения вычисляем угловую скорость:

Получаем скорости точек:
Система уравнений для скоростей точек звена ЕН имеет вид
Отсюда

Звено СК совершает мгновенно-поступательное движение. Следовательно, скорости точек С я К равны:  Угловая скорость этого звена равна нулю
Угловая скорость этого звена равна нулю  .
.
 Можно считать, что МЦС звена, движущегося мгновенно-поступательно, находится в бесконечности. Поэтому, рассуждая формально, получаем
Можно считать, что МЦС звена, движущегося мгновенно-поступательно, находится в бесконечности. Поэтому, рассуждая формально, получаем 
Частично проверить решение можно графически. Известно, что концы векторов скоростей точек неизменяемого отрезка лежат на одной прямой. Убеждаемся в этом, проводя прямую через концы векторов  отложенных на чертеже в масштабе (рис. 90).
отложенных на чертеже в масштабе (рис. 90).
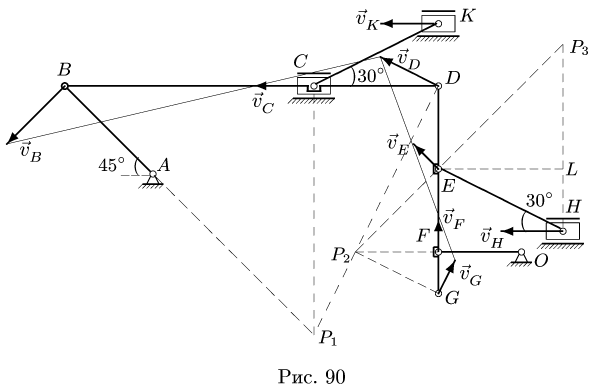
Аналогично, проверяем скорости  Через их концы также можно провести прямую. Остались непроверенными скорости точек Е и Н. Для этого можно воспользоваться методом построения плана скоростей, см. ниже 2-й способ.
Через их концы также можно провести прямую. Остались непроверенными скорости точек Е и Н. Для этого можно воспользоваться методом построения плана скоростей, см. ниже 2-й способ.
Результаты расчетов помещаем в таблицы. Скорости даны в см/с, угловые скорости — в рад/с.
2-й способ. План скоростей
1. Построение начинаем с вектора, величина и направление которого известны или легко вычисляются. В нашем случае это  . Вектор
. Вектор  в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Все остальные вектора также будем откладывать от этой точки.
в заданном масштабе откладываем от некоторой произвольной точки О (рис. 91). Все остальные вектора также будем откладывать от этой точки.
8.1.Скорости точек многозвенного механизма
Точки плана скоростей (концы векторов) отмечаем соответствующими строчными буквами. Таким образом, положение точки b на плане скоростей известно.
2. Рассматриваем звено BCD (рис. 90), на котором имеется точка В с известной скоростью. Неизменяемые отрезки механизма, обозначенные прописными буквами, перпендикулярны отрезкам плана скоростей, обозначенными теми же строчными буквами, Звено механизма ВС горизонтально.
Звено механизма ВС горизонтально.
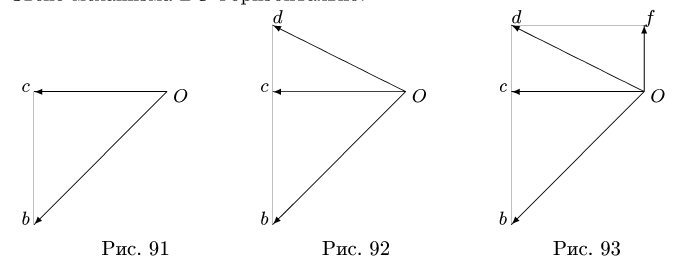
Следовательно, точка с плана скоростей лежит на одной вертикали с точкой b. Известно направление скорости ползуна С. Точку с находим на пересечении двух прямых. Вектор  изображен отрезком Ос плана скоростей (рис. 91). Из правила подобия фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей(в данном случае это отрезки BC и CD),имеем
изображен отрезком Ос плана скоростей (рис. 91). Из правила подобия фигур механизма и фигур, обозначенных теми же строчными буквами плана скоростей(в данном случае это отрезки BC и CD),имеем 
Так получаем точку d плана скоростей и, следовательно, величину и направление вектора (рис. 92).
(рис. 92).
Определяем скорость  Направление этого вектора известно – он перпендикулярен радиусу вращения FO. По свойству плана скоростей
Направление этого вектора известно – он перпендикулярен радиусу вращения FO. По свойству плана скоростей  Точка d на плане уже есть. Проводим через нее горизонтальную прямую (перпендикулярную DF) до пересечения с вертикальным направлением вектора скорости
Точка d на плане уже есть. Проводим через нее горизонтальную прямую (перпендикулярную DF) до пересечения с вертикальным направлением вектора скорости  Получаем точку
Получаем точку  (рис. 93). Соединяя ее с центром О, определяем модуль искомой скорости
(рис. 93). Соединяя ее с центром О, определяем модуль искомой скорости 
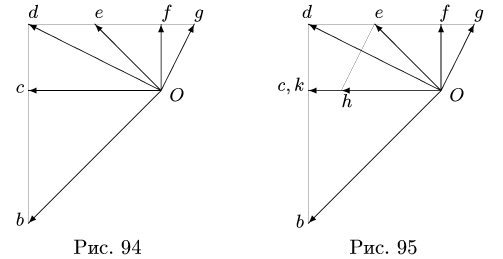
Из соотношения подобия  на отрезке
на отрезке  находим внутри него конец вектора скорости
находим внутри него конец вектора скорости  и вне отрезка, пользуясь пропорцией
и вне отрезка, пользуясь пропорцией  точку
точку  определяющую вектор скорости
определяющую вектор скорости  (рис. 94).
(рис. 94).
Аналогично, определяем скорость (рис. 95). Здесь
(рис. 95). Здесь  Точки
Точки  и с на плане скоростей совпадают.
и с на плане скоростей совпадают.
3. Угловые скорости звеньев определяем по простым формулам: 
Ускорения точек многозвенного механизма
Постановка Задачи. Плоский шарнирно-стержневой механизм состоит из шарнирно соединенных стержней и ползунов. Механизм приводится в движение кривошипом, который вращается с заданной угловой скоростью. В указанном положении механизма найти ускорения всех его шарниров.
*) Существует еще несколько способов проверки вычисления скоростей точек многозвенного механизма.
8.2. Ускорения точек многозвенного механизма
План решения
1. Определяем угловые скорости звеньев и скорости точек механизма (см. § 8.1).
2. Определяем ускорение шарнира, принадлежащего звену с известным законом движения:
где R — длина звена. Если задан закон изменения утла поворота  то
то 
Если угловая скорость звена постоянна,  Вектор ускорения в этом случае направляем к центру вращения звена.
Вектор ускорения в этом случае направляем к центру вращения звена.
3. Для определения ускорения точки В тела, совершающего плоское движение, воспользуемся векторной формулой

Здесь  — известное ускорение точки, выбранной в качестве полюса,
— известное ускорение точки, выбранной в качестве полюса,  — центростремительное ускорение условного движения В вокруг А по окружности с радиусом
— центростремительное ускорение условного движения В вокруг А по окружности с радиусом  — вращательное ускорение.
— вращательное ускорение.
Возможны три случая определения ускорения по формуле (1). А. Точка В является ползуном, или направление ее вектора ускорения по каким-либо другим причинам известно. В этом случае формула (1) в проекциях на оси координат представляет собой систему двух линейных уравнений для неизвестного модуля ускорения ав и неизвестного углового ускорения звена 
Б. В точке В шарнирно соединены звено АВ и звено ВС, где С — неподвижный шарнир. Таким образом, точка В движется по окружности с центром в С, и ее ускорение можно представить в виде векторной суммы нормального и тангенциального ускорения:

Величину нормального ускорения  находим, зная скорость точки
находим, зная скорость точки  Направляем вектор
Направляем вектор по радиусу ВС к центру вращения С. Вектор
по радиусу ВС к центру вращения С. Вектор  неизвестен лишь по модулю, направление его известно — перпендикулярно радиусу ВС.
неизвестен лишь по модулю, направление его известно — перпендикулярно радиусу ВС.
В результате, система уравнений (1-2), записанная в проекциях, дает четыре уравнения для четырех неизвестных 
 Решая ее, находим ускорение
Решая ее, находим ускорение 
В. Точка В не удовлетворяет случаям А и Б. В этом случае либо она не является шарниром, либо к ней шарнирно присоединено тело, совершающее плоское (не вращательное и не поступательное) движение. Для решения задачи должны быть известны угловая скорость и угловое ускорение звена, на котором находится точка В. Они могут быть найдены при вычислении скорости и ускорения других точек этого звена. При этих условиях уравнение (1) является векторным уравнением для одной неизвестной  .
.
Этот пункт плана выполняем последовательно для всех звеньев механизма. Очередное звено должно иметь общую точку (шарнир) с предыдущим.
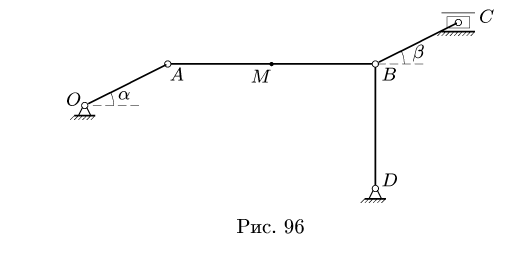
Задача №2
Плоский шарнирно-стержневой механизм состоит из четырех шарнирно соединенных стержней и горизонтально движущегося ползуна С (рис. 96). Механизм приводится в движение кривошипом OA, который вращается с постоянной угловой скоростью  = 2 рад/с. В указанном положении механизма найти ускорения шарниров А, В, С и точки М. Даны размеры: АО = 2 см, А В = 5 см,
= 2 рад/с. В указанном положении механизма найти ускорения шарниров А, В, С и точки М. Даны размеры: АО = 2 см, А В = 5 см, 
Решение
1. Определяем угловые скорости звеньев и скорости точек механизма. Находим величину скорости точки А:

Вектор  направляем перпендикулярно радиусу АО против часовой стрелки. Вектор скорости
направляем перпендикулярно радиусу АО против часовой стрелки. Вектор скорости  направлен горизонтально. Мгновенный центр скоростей Р звена АВ находится на пересечении перпендикуляров к векторам скоростей точек
направлен горизонтально. Мгновенный центр скоростей Р звена АВ находится на пересечении перпендикуляров к векторам скоростей точек  (рис. 97). Находим расстояния
(рис. 97). Находим расстояния
8.2. Ускорены точек многозвенного механизма
от точек А, В, М до МЦС:
Скорости точек находим из системы уравнений
В результате решения получаем
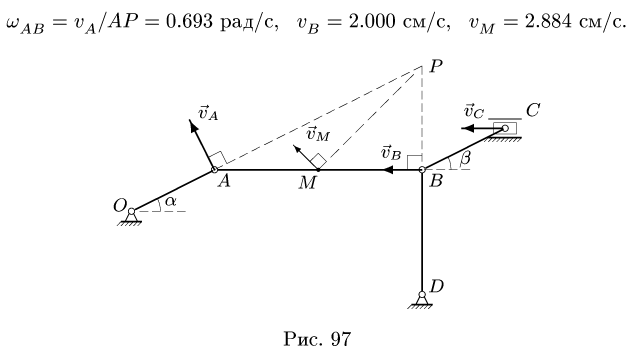
Найти скорость точки С не составит труда. Векторы  параллельны и не перпендикулярны отрезку ВС. Следовательно, звено ВС совершает мгновенно-поступательное движение, и скорости всех его точек в этот момент равны. Отсюда,
параллельны и не перпендикулярны отрезку ВС. Следовательно, звено ВС совершает мгновенно-поступательное движение, и скорости всех его точек в этот момент равны. Отсюда, 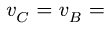 2 см/с. Угловая скорость звена ВС равна нулю.
2 см/с. Угловая скорость звена ВС равна нулю.
2. Определяем ускорение шарнира А, принадлежащего звену OA с известной постоянной угловой скоростью  . Ускорение точки А состоит только из нормальной составляющей,
. Ускорение точки А состоит только из нормальной составляющей,
 и направлено вдоль О А к центру О (рис. 98).
и направлено вдоль О А к центру О (рис. 98).
3. Находим ускорение точки В. Точка В движется по окружности с центром в неподвижном шарнире D, и ее ускорение можно представить в виде векторной суммы нормального и тангенциального ускорений:

С другой стороны, ускорение точки В выражается через ускорение точки А, лежащей на том же звене АВ. Рассматривая А в качестве полюса, имеем

Сравнивая (3) и (4), получаем, что

В проекциях на оси х, у (рис. 98) векторное уравнение (3) дает систем}’ двух уравнений относительно неизвестных 

где 
Решаем систему (5):

Окончательно, величина ускорения точки В
8.2. Ускорены точек многозвенного механизма
Вычисление ускорения точки М выполняем по п.ЗВ плана решения. Действительно, угловая скорость и угловое ускорение звена А В уже известны:
Рассматривая А в качестве полюса (рис. 99), записываем векторное уравнение
где Из (6) определяем проекции
Из (6) определяем проекции  на оси координат:
на оси координат:

Величина ускорения точки M

Находим ускорение точки С. Скорости точек В я С звена ВС, совершающего мгновенно – поступательное движение, равны, однако, их ускорения различны.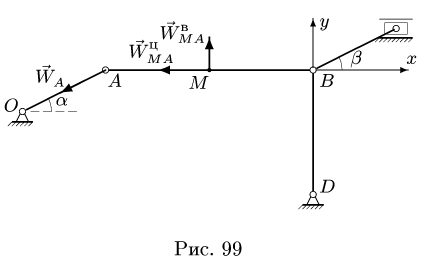
Для определения  воспользуемся векторным равенством (полюс — точка В)
воспользуемся векторным равенством (полюс — точка В)

 В качестве полюса можно также брать точку В, ускорение которой уже найдено.
В качестве полюса можно также брать точку В, ускорение которой уже найдено.
где Вектор
Вектор  раскладываем на составляющие (рис. 100)
раскладываем на составляющие (рис. 100)

Векторное уравнение (7) содержит две неизвестных величины: и
и Записывая (7) в проекциях на оси ху, получаем систему двух уравнений с двумя неизвестными. Но можно решить задачу проще.
Записывая (7) в проекциях на оси ху, получаем систему двух уравнений с двумя неизвестными. Но можно решить задачу проще.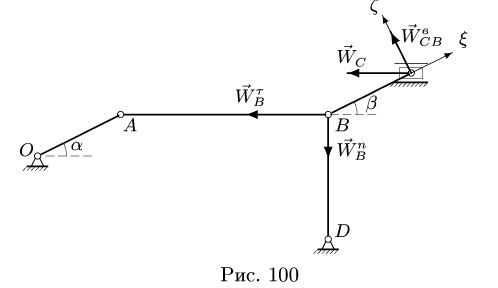
Спроецируем (7) на ось  направленную вдоль стержня ВС. При этом в уравнение не войдет модуль неизвестного вектора
направленную вдоль стержня ВС. При этом в уравнение не войдет модуль неизвестного вектора 

Находим
Результаты расчетов помещаем в таблицу (скорости в см/с, ускорения в см/

8.3. Уравнение трех угловых скоростей
Постановка задачи. Подобрать длины звеньев шарнирного четырехзвенника так, чтобы в некоторый момент движения угловые скорости его звеньев были бы равны заданным. Положение опорных шарниров четырехзвенника известно.
План решения:
Под угловыми скоростями будем понимать проекции соответствующих векторов на ось  перпендикулярную плоскости движения. Индекс
перпендикулярную плоскости движения. Индекс  дополнительно указывать не будем, принимая
дополнительно указывать не будем, принимая 
1. Последовательно нумеруем шарниры и звенья механизма. Выбираем систему координат, помещая ее начало в один из шарниров механизма. Определяем координаты шарниров.
2. Записываем уравнения трех угловых скоростей

где  — координаты шарниров на концах звена, имеющего угловую скорость
— координаты шарниров на концах звена, имеющего угловую скорость  Шарниры 1 и 4 — опорные. Все угловые скорости и некоторые координаты даны в условии.
Шарниры 1 и 4 — опорные. Все угловые скорости и некоторые координаты даны в условии.
3. Решаем систему (1) относительно неизвестных координат. Определяем длины звеньев механизма (расстояния между шарнирами) по формулам

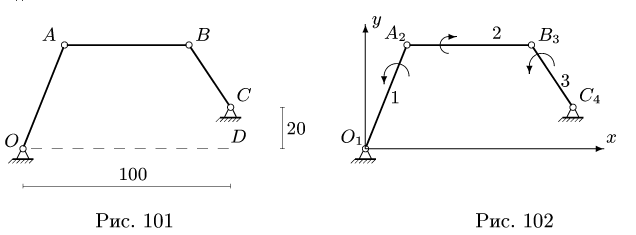
Задача №3
В положении, изображенном на рис. 101, известны угловые скорости шарнирного четырехзвенника О ABC:  = 2 рад/с,
= 2 рад/с,  рад/с. Найти длины звеньев OA и ВС,
рад/с. Найти длины звеньев OA и ВС,  . Расстояния даны в см, АВ = 60 см.
. Расстояния даны в см, АВ = 60 см.
Решение
1. Последовательно нумеруем шарниры и звенья механизма. Номера шарниров указываем индексами у соответствующих букв. Выбираем систему координат, помещая ее начало в шарнир О. Определяем координаты шарниров (рис. 102):

2. Записываем уравнения трех угловых скоростей (1), где по условию 
 Уравнения следуют из координатной формы записи векторной формулы (1), на с. 130, для скоростей точек при плоском движении.
Уравнения следуют из координатной формы записи векторной формулы (1), на с. 130, для скоростей точек при плоском движении.
8.3. Уравнение трех угловых скоростей
 рад/с. Система приобретает вид
рад/с. Система приобретает вид

3. Решаем систему (2) относительно  Получаем
Получаем

Кроме того,  Определяем длины звеньев:
Определяем длины звеньев:
Уравнение трех угловых ускорений
Постановка задачи. Многозвенный механизм приводится в движение кривошипом, вращающимся с известной угловой скоростью и известным угловым ускорением. Найти угловые скорости и угловые ускорения звеньев механизма.
План решения:
Под угловыми скоростями и ускорениями будем понимать проекции соответствующих векторов на ось  перпендикулярную плоскости движения. Индекс
перпендикулярную плоскости движения. Индекс  дополнительно указывать не будем, принимая
дополнительно указывать не будем, принимая 
1. Нумеруем шарниры и звенья механизма. Выбираем систему координат, помещая ее начато в один из шарниров механизма. Определяем координаты шарниров.
2. Выделяем из механизма шарнирные четырехзвенники. Рассмотрим четырехзвенник, шарниры которого последовательно обозначены номерами  — номера неподвижных
— номера неподвижных
Гл. 8. Плоское движение тела
шарниров. Стержни четырехзвенника имеют номера 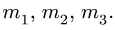 Записываем уравнения трех угловых скоростей:
Записываем уравнения трех угловых скоростей:

где  ( — угловая скорость
( — угловая скорость  -го звена,
-го звена,  — координаты его концов. Номера шарниров
— координаты его концов. Номера шарниров  как и номера звеньев
как и номера звеньев  не обязательно должны быть последовательными числами.
не обязательно должны быть последовательными числами.
3. Из решения (1) получаем все угловые скорости механизма.
4. Записываем уравнения трех угловых ускорений для каждого четырехзвенника *) :
где  — угловое ускорение
— угловое ускорение  -го звена.
-го звена.
5. Решаем (2) относительно неизвестных угловых ускорений.
Задача №4
Многозвенный механизм приводится в движение кривошипом OA, вращающимся с угловой скоростью  = 1 рад/с и угловым ускорением
= 1 рад/с и угловым ускорением  (рис. 103).
(рис. 103).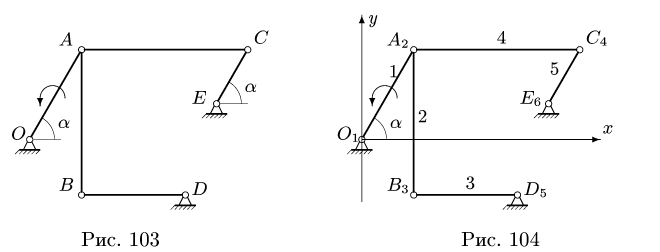
Дано:
 Найти угловые скорости и угловые ускорения звеньев механизма.
Найти угловые скорости и угловые ускорения звеньев механизма.
 Уравнения следуют из координатной формы записи векторной формулы (4), на с. 130, для ускорений точек при плоском движении.
Уравнения следуют из координатной формы записи векторной формулы (4), на с. 130, для ускорений точек при плоском движении.
8.4. Уравнение трех угловых ускорений
Решение
1. Нумеруем шарниры и звенья механизма (рис. 104). Выбираем систему координат, помещая ее начало в шарнир О. Определяем координаты шарниров:
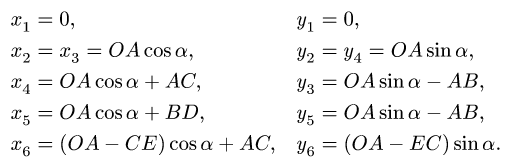
2. Выделяем из механизма шарнирные четырехзвенники (рис. 105, 106). Записываем уравнения трех угловых скоростей для четырехзвенника OABD (рис. 105),

и для четырехзвенника О АСЕ (рис. 106),

(4)
3. Решаем систему четырех линейных уравнений (3), (4). Получаем угловые скорости звеньев:
 Из решения следует, что звено АС движется мгновенно-поступательно. Этот результат очевиден. Его можно было получить сразу из условия задачи, не решая ее. Действительно,
Из решения следует, что звено АС движется мгновенно-поступательно. Этот результат очевиден. Его можно было получить сразу из условия задачи, не решая ее. Действительно,  следовательно, векторы скоростей шарниров А и С также
следовательно, векторы скоростей шарниров А и С также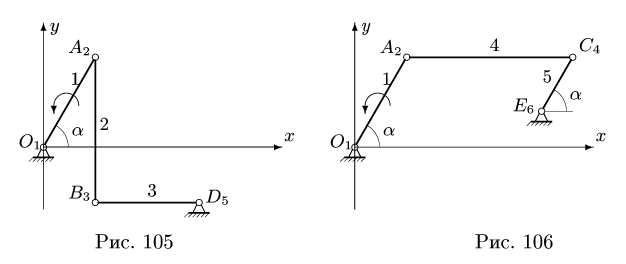
параллельны и но перпендикулярны АС. Мгновенного центра скоростей звена АС не существует (расположен в “бесконечности”), что соответствует 
4. Записываем уравнения трех угловых ускорений для четырех-звенника OABD (рис. 105),

и для четырехзвенника ОАСЕ (рис. 106),
5. Из решения (5,6) получаем угловые ускорения: 

Кинематические уравнения плоского движения
Постановка задачи. Составить кинематические уравнения плоского многозвенного механизма.
План решения:
1. Составляем кинематические графы механизма, выбирая наиболее короткие маршруты. Началом и концом графа должна быть точка с известной скоростью. Кинематические графы должны включать в себя все звенья механизма. Некоторые звенья могут входить в разные графы. Обозначения для графов приведены на с. 130.
8.5. Кинематические уравнения плоского движения
2. Записываем по два кинематических уравнения в проекциях на оси координат для каждого графа. Получаем систему дифференциальных уравнений.
3. Упрощаем систему уравнений, используя уравнения связей и тригонометрические формулы приведения.
Задача №5
Механизм состоит из стержней OA, АВ, CD и ползунов С и D. Ползун D движется вверх со скоростью  (рис. 107); BD = ВС. Составить кинематические уравнения механизма.
(рис. 107); BD = ВС. Составить кинематические уравнения механизма.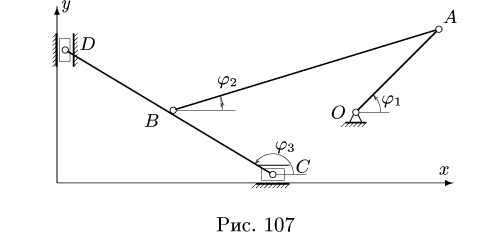
Решение
1. Составляем кинематические графы:
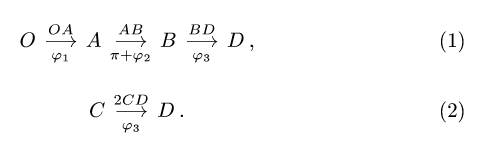
2. Записываем для каждого графа (1), (2) по два кинематических уравнения в проекциях на оси координат:
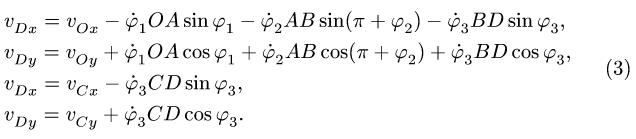
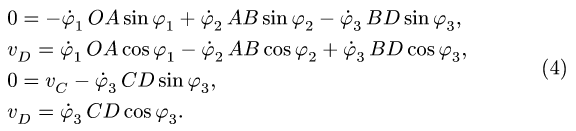
3. Упрощаем систему (3), используя уравнения связей,
 и тригонометрические
и тригонометрические
Гл. 8. Плоское движение тела
формулы приведения:
Задача №6
Плоский манипулятор состоит из жесткой детали ОАВ, стержней ВС, AM, колеса С и захвата М. Даны длины
 и скорость захвата
и скорость захвата 
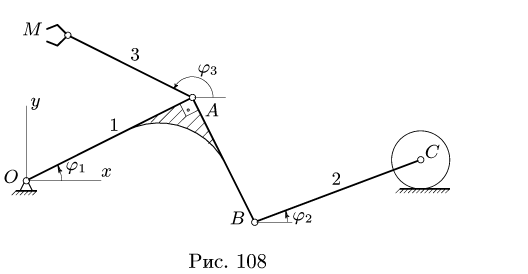
Составить кинематические уравнения манипулятора . Решение
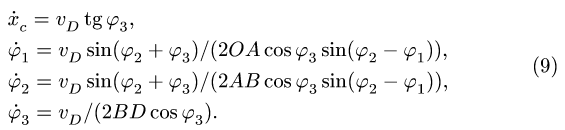
1. Составляем кинематические графы:

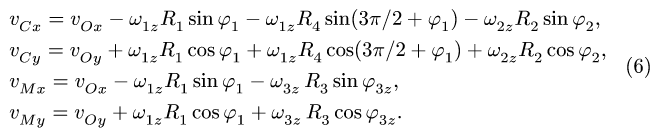
2. Записываем по два кинематических уравнения в проекциях на оси координат для каждого графа (5):
 Задание K-3 из сборника [15]. В задании К-3 скорость точки М определяется из решения дифференциального уравнения так, чтобы манипулятор захватил деталь, движущуюся по известному закону. В рассматриваемом примере задача захвата не решается, а предполагается, что скорость М известна из других соображений, в том числе из условия захвата детали.
Задание K-3 из сборника [15]. В задании К-3 скорость точки М определяется из решения дифференциального уравнения так, чтобы манипулятор захватил деталь, движущуюся по известному закону. В рассматриваемом примере задача захвата не решается, а предполагается, что скорость М известна из других соображений, в том числе из условия захвата детали.
8.5. Кинематические уравнения плоского движения
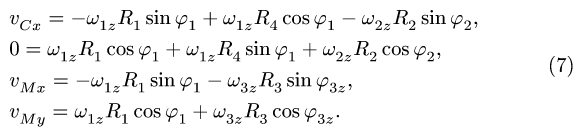
3. Упрощаем систему (6), используя уравнения связей,
 и тригонометрические формулы приведения:
и тригонометрические формулы приведения:
Замечание 1. В данной задаче скорости точек механизма можно найти для некоторого промежутка времени, а не для фиксированного момента времени, как в аналогичных задачах § 8.1, § 8.3. Решая нелинейную систему дифференциальных уравнений (4), получаем полную картину движения механизма . Для решения системы (4) необходимо дополнить ее начальными условиями:

где константы и определяют начальную конфигурацию механизма. В некоторых численных методах для решения систему (4) требуется привести к форме Коши. Уравнения (4) представляют собой систему четырех алгебраических уравнений относительно
и определяют начальную конфигурацию механизма. В некоторых численных методах для решения систему (4) требуется привести к форме Коши. Уравнения (4) представляют собой систему четырех алгебраических уравнений относительно 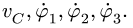 Решая систему, получаем, что
Решая систему, получаем, что
Замечание 2. В решении задачи следует использовать наиболее короткие графы. В данном случае вместо графа (2) можно было бы выбрать граф
Система дифференциальных уравнений изменится, однако в форме Коши ее вид останется прежним.
 На странице Интернет кафедры теоретической механики МЭИ www.termech.mpei.ac.ru можно найти обучающую программу ROBBY2, разработанную Осадченко Н.В. и Корецким А.В. Программа интегрирует уравнения (4), составленные- для задач из сборника [15], анимирует полученное решение и представляет результаты в виде графиков и таблиц.
На странице Интернет кафедры теоретической механики МЭИ www.termech.mpei.ac.ru можно найти обучающую программу ROBBY2, разработанную Осадченко Н.В. и Корецким А.В. Программа интегрирует уравнения (4), составленные- для задач из сборника [15], анимирует полученное решение и представляет результаты в виде графиков и таблиц.
Замечание 3. Метод графов широко используется для решения задач кинематики и динамики. Примеры составления графов представлены также на с. 243, 244 310, 313, 316, 327, 329.
Замечание 4. Для того, чтобы проинтегрировать полученные кинематические уравнения, необходимо скорости ползунов выразить через соответствующие координаты, например,  задать одну из пяти функций, входящих в уравнения, и выбрать для остальных функций начальные условия.
задать одну из пяти функций, входящих в уравнения, и выбрать для остальных функций начальные условия.
Предупреждение типичных ошибок:
- Кинематические графы являются ориентированными графами. Меняя направление маршрута, меняйте и угол. Следующие два графа
- эквивалентны:

- Угловая скорость звена, которому принадлежат точки А и В графа , не обязательно равна см., например, с. 243.
 , не обязательно равна
, не обязательно равна  см., например, с. 243.
см., например, с. 243.- Принцип виртуальных перемещений
- Аксиомы и теоремы статики
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Равновесие вала
- Определение усилий в стержнях, поддерживающих плиту
- Тело на сферической и стержневых опорах
- Приведение системы сил к простейшему виду
